Устройство и способ сейсмического исследования подземной структуры - RU2497152C2
Код документа: RU2497152C2
Чертежи





Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к представлению и отображению данных изображения, таких как многомерные сейсмические данные в угловой области или другие связанные с углом трехмерные данные.
Предпосылки создания изобретения
Излучатель, расположенный на земной поверхности или в другом месте, может излучать сигналы, такие как акустические волны, продольные волны или другие энергетические лучи или волны, которые могут проходить сквозь подземные структуры. Излученные сигналы могут становиться падающими сигналами, которые падают на подземные структуры. Падающие сигналы могут отражаться на различных переходных зонах или геологических разрывах на протяжении подземных структур. Отраженные сигналы могут включать в себя сейсмические волны. Сейсмические волны, включающие в себя, например, продольные (P) волны и поперечные (S) волны (например, поперечные волны, в случае которых движение частиц может быть перпендикулярным к направлению распространения волны), можно использовать для построения изображений подземных геологических структур, например, переходных поверхностей или геологических структур, например, переходных поверхностей или геологических разрывов. На приемнике можно собирать и регистрировать данные, например, отраженные сейсмические волны.
При проведении исследований можно использовать большое количество излучателей и приемников для регистрации сигналов в поперечном направлении больших геофизических районов. Исследуемые сейсмическим способом районы могут продолжаться, например, на площади до нескольких сотен квадратных километров. При некоторых исследованиях расстояние между излучателями и приемниками может составлять, например, около двадцати метров, излучаемые сигналы могут распространяться на расстояние около десяти километров, и частоты излучаемых сигналов могут быть около пятидесяти герц. Могут использоваться другие значения или параметры. Регистрируемые данные можно собирать на протяжении временных интервалов, например, десятисекундных интервалов, и можно преобразовывать в цифровую форму каждые 4 мс, хотя также возможны другие параметры. Например, на приемнике можно собирать и/или регистрировать несколько десятков или сотен терабайтов данных. После сбора зарегистрированные данные можно сохранять и/или передавать на устройство хранения или обработки данных, такое как запоминающее устройство, сервер или вычислительная система.
Чтобы улучшить освещение коллекторов под сложными структурами и повысить точность геофизического обнаружения, в некоторых способах регистрации сейсмических данных, таких как способы регистрации многоазимутальных или широкоазимутальных данных, количество используемых излучаемых и принимаемых сигналов можно значительно увеличить. В случае таких способов можно регистрировать единственный параметр (например, давление или вертикальное смещение) или несколько параметров (например, давление и три составляющие смещения). Можно регистрировать P-волны и S-волны. Можно регистрировать волны других типов и другие данные. В таких способах может возрастать количество данных, регистрируемых для построения изображений подземных областей. Для согласования с большим количеством данных в системах, в которых осуществляются регистрация, обработка, построение изображений или иным образом используются данные, необходимы запоминающее устройство повышенной емкости, повышенная скорость доступа к устройствам ввода и/или вывода и/или высокопроизводительные вычислительные средства, или что-либо подобное. Такими системами могут выполняться работы, требующие большого объема вычислений и энергии.
Разведка геофизических областей может включать в себя построение изображения подземной геологической среды с использованием сейсмических данных, регистрируемых из исследуемых областей, для определения местоположений, например, коллекторов углеводородов. Способы построения сейсмических изображений, которые могут быть названы способами сейсмических миграций, можно разделить, например, на две основные категории: миграции на основе решения волнового уравнения и миграции Кирхгофа на основе лучей. Миграции обоих видов можно использовать для формирования изображений подземной геологической среды. В способах миграции на основе решения волнового уравнения численные решения волнового уравнения можно использовать для экстраполяции зарегистрированных волновых полей в подземную геологическую среду. На каждом уровне глубины условия формирования изображения можно применять к падающим и отраженным волновым полям. Миграции Кирхгофа на основе лучей можно выполнять в два этапа: трассирование лучей и построение изображения. Трассированием лучей можно моделировать распространение волн (например, лучей), например, в направлении от поверхности к точке изображения в подземной области и/или в направлении от точки изображения в подземной области к поверхности. Атрибуты лучей, такие как времена пробега, траектории лучей, векторы медленности, амплитудный и фазовый множители, могут быть вычислены вдоль трассируемых лучей. На этапе построения изображения атрибуты лучей можно использовать для получения изображения подземной геологической среды на основании зарегистрированных сейсмических данных.
Миграциями на основе решения волнового уравнения и Кирхгофа на основе лучей можно получать сейсмограммы общей точки изображения. Сейсмограммы общей точки изображения могут включать в себя многочисленные трассы изображения в заданном поперечном положении. Каждую трассу изображения можно образовать, используя часть зарегистрированных данных, которые имеют общий геометрический атрибут. Например, сейсмограмма общей точки изображения в области удалений может включать в себя многочисленные трассы изображения, при этом каждую трассу можно составить, используя точки сейсмических данных с одним и тем же удалением или расстоянием между источником и приемником на земной поверхности. Сейсмограмма общей точки изображения в угловой области может включать в себя многочисленные трассы изображения, при этом каждую трассу можно составить, используя точки сейсмических данных с одним и тем же углом раскрыва между падающим и отраженным лучами в точке отражения.
Сейсмограммы общей точки изображения, формируемые на основе трасс, в которых совместно используется единственный азимут, могут изображать геофизические структуры с недостаточной точностью. Например, показано, что при наличии эффектов анизотропии изображения, получаемые на различных азимутальных углах, могут существенно различаться. Для построения с заданной точностью изображений геофизических структур, таких как разрывы, небольшие вертикальные смещения и трещины субсейсмического масштаба (например, трещины размером меньше десятков метров, которые могут быть за пределами разрешающей способности обнаружения типичных приемников или других средств обнаружения), может потребоваться построение изображения в, по существу, каждом азимутальном угле (которое может быть названо, например, построением полноазимутального изображения). Широкоазимутальные сейсмические данные могут быть особенно ценными для построения изображения, например, ниже соляного купола или насыщенных солью структур, таких как структуры в Мексиканском заливе. При построении изображений геофизических структур с использованием, например, трехмерных (многоазимутальных) сейсмограмм общей точки изображения вместо обычно используемых двумерных (например, одноазимутальных или узкоазимутальных) сейсмограмм общей точки изображения можно повысить точность изображений и получить дополнительную информацию о структурах. Например, трехмерные сейсмограммы общей точки изображения в области удалений могут включать в себя многочисленные трассы изображения, которые имеют в значительной степени различающиеся азимутальные углы на земной поверхности, наряду с в значительной степени различающимися расстояниями источник-приемник. Удаление может быть двумерным вектором, например, имеющим значения для составляющих вдоль линии приема и поперек линии приема или для длины и азимута. Аналогичным образом трехмерные сейсмограммы общей точки изображения в угловой области могут включать в себя многочисленные изобразительные трассы, которые имеют в значительной степени различающиеся азимутальные углы раскрыва на отражающей поверхности, наряду с, по существу, различными углами раскрыва. Угол раскрыва может быть, например, углом между падающим и отраженным лучами, измеренным в точке отражения, соответствующей им. Азимутальный угол раскрыва может быть, например, азимутом нормали к плоскости, которая проходит через падающий и отраженный лучи. В качестве варианта можно использовать другие углы. Хотя трехмерные сейсмограммы общей точки изображения могут повышать точность построения изображений, они также могут повышать вычислительную сложность при построении изображений, визуализации и/или сложность систем интерпретации с использованием таких сейсмограмм. Кроме того, для съемки трехмерных сейсмограмм общей точки изображения может потребоваться запоминающее устройство большой емкости.
Сейсмограммы общей точки изображения можно использовать, например, при кинематическом и динамическом анализах подземных структур. Например, используя томографические способы, кинематический анализ можно применять для построения и обновления геофизических моделей. Томографические способы можно использовать для нахождения набора параметров модели, при которых, по существу, минимизируются ошибки времен пробега вдоль зеркальных лучей (например, пар лучей, которые подчиняются принципам закона Снеллиуса на отражающих поверхностях). Ошибки времен пробега могут быть определены, например, по разностям положений отраженных волн вдоль сейсмограмм общей точки изображения. По существу, каждая отраженная волна в пределах данной сейсмограммы общей точки отражения может быть связана с конкретной глубиной. Если «истинный» отражатель (например, элемент отражающей поверхности) расположен на определенной глубине, и параметры модели являются «точными», то элементы отражателя обычно находятся на той же самой глубине, независимо от угла отражения или удаления, обозначенного конкретной трассой. Когда отраженные волны не находятся на, по существу, одинаковой глубине (например, когда отраженные волны вдоль сейсмограмм общей точки отражения, по существу, не являются плоскими), измеренные или выбранные разности глубин точек отражения различных отраженных волн можно использовать для оценивания ошибок времен пробега вдоль зеркальных лучей, соответствующих каждой трассе. Модель может быть, по существу, точной, когда сейсмические отраженные волны вдоль сейсмограмм общей точки изображения являются, по существу, горизонтально плоскими. Чтобы получить точную модель, применяя, например, представление модели анизотропии, можно использовать зеркальные лучи и соответствующие погрешности времен пробега вследствие изменяющихся углов раскрыва (или, например, удалений), например, на, по существу, всех азимутах. В некоторых осуществлениях такие трехмерные сейсмограммы общей точки изображения могут обеспечивать информацию об азимутально-зависимых ошибках времен пробега.
Динамический анализ может включать в себя определение физических и/или материальных параметров или свойств целевых подземных структур с использованием изменений амплитуды и фазы отраженных волн, измеренных, например, вдоль сейсмограмм общей точки изображения. Многоазимутальные сейсмограммы общей точки изображения могут делать возможным выполнение азимутального анализа изменений амплитуды относительно угла раскрыва (или, например, удаления), результатом которого может быть точная реконструкция параметров анизотропии и маломасштабных трещин.
Помимо построения сейсмических изображений или изображений геологической среды, предназначенных для разведки и добычи нефти и газа, можно осуществлять построение других изображений, таких как, например, малоглубинное сейсмическое изображение для исследования окружающей среды, археологии и строительной промышленности. Точно так же, для этих других способов необходимо формировать большое количество данных и иметь большую вычислительную мощность. При построении изображений других видов, таких как медицинское изображение, также можно использовать относительно большое количество излучателей и детекторов, и следовательно, также можно использовать относительно большое количество данных, для которых могут потребоваться запоминающее устройство большой емкости и значительные вычислительные затраты.
В предшествующей патентной заявке № 11/798996 описаны эффективное использование, хранение, обработка, построение изображения, анализ, визуализация и интерпретация богатых азимутальных данных в системе координат с приведенной размерностью. При некоторых других применениях способа построения изображения богатые азимутальные данные разбивают на несколько (например, до восьми) азимутальных секторов. Существует необходимость отображения дискретных данных, сохраняемых, например, в системе координат с приведенной размерностью, или разбитых на азимутальные секторы данные, в непрерывной полноразмерной системе координат.
Краткое изложение сущности изобретения
Осуществления изобретения могут включать в себя вычисление, на основании набора широкоазимутальных данных, набора дискретных данных, связанных с функцией изображения в точке сейсмического изображения. Набор дискретных данных может быть преобразован в непрерывную криволинейную трехмерную поверхность. Преобразованные данные могут быть спроецированы на плоскую поверхность. Множество непрерывных плоских поверхностей, каждая из которых представляет единственную точку изображения, может быть собрано для образования трехмерного тела, представляющего сейсмограмму точек изображения. Может быть осуществлено отображение трехмерного тела. Другие осуществления описаны и заявлены.
Краткое описание чертежей
Принципы и работу системы, устройства и способа согласно осуществлениям настоящего изобретения можно лучше понять при обращении к чертежам и нижеследующему описанию, при этом должно быть понятно, что эти чертежи приведены только для иллюстрации и не подразумеваются ограничивающими.
На чертежах:
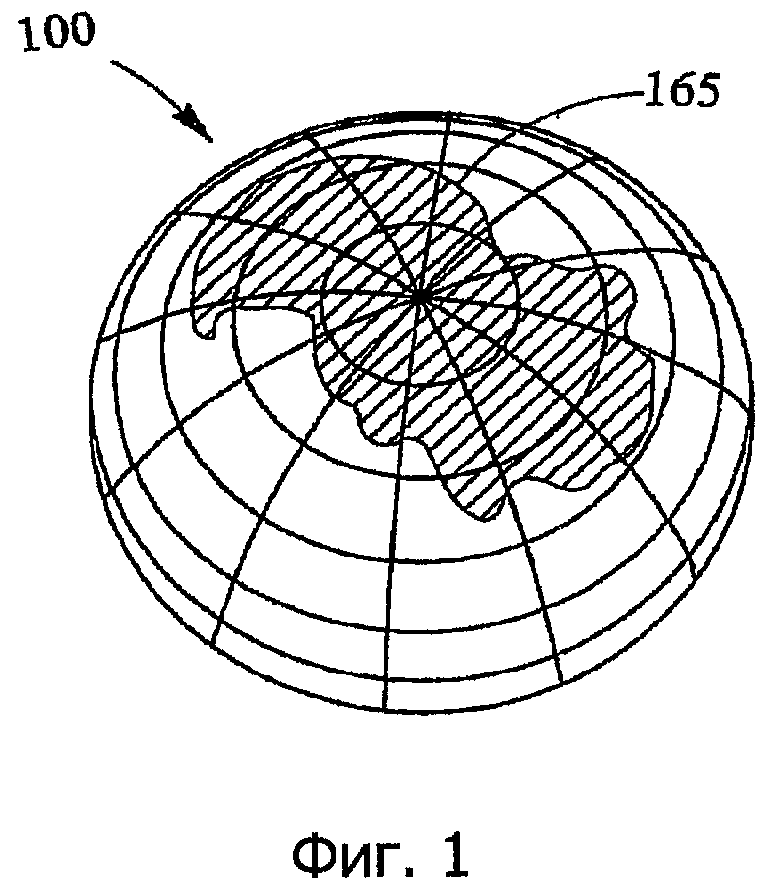
фиг.1 - схематичная иллюстрация сферической картины данных об углах отражения, связанных с единственной точкой изображения, согласно осуществлению изобретения;
фиг.2 - схематичная иллюстрация сферической картины данных о направлениях, связанных с единственной точкой изображения, согласно осуществлению изобретения;
фиг.3 - схематичная иллюстрация цилиндрической картины данных об углах отражения, связанных с множеством точек изображения, согласно осуществлению изобретения;
фиг.4 - схематичная иллюстрация цилиндрической картины данных о направлениях, связанных с множеством точек изображения, согласно осуществлению изобретения;
фиг.5 и 6 - блок-схемы последовательности операций способов, согласно осуществлениям изобретения;
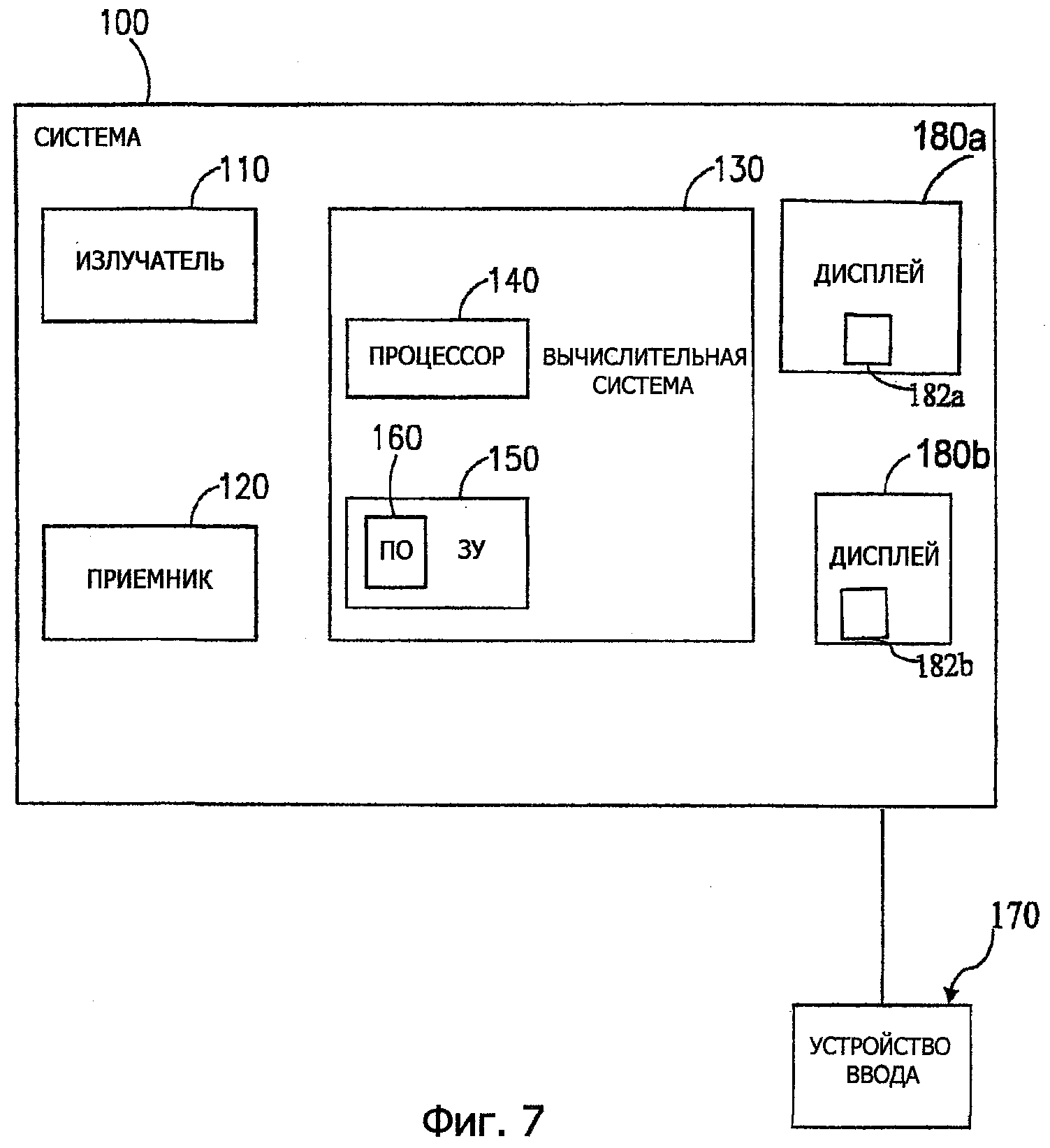
фиг.7 - структурная схема системы, согласно осуществлению изобретения;
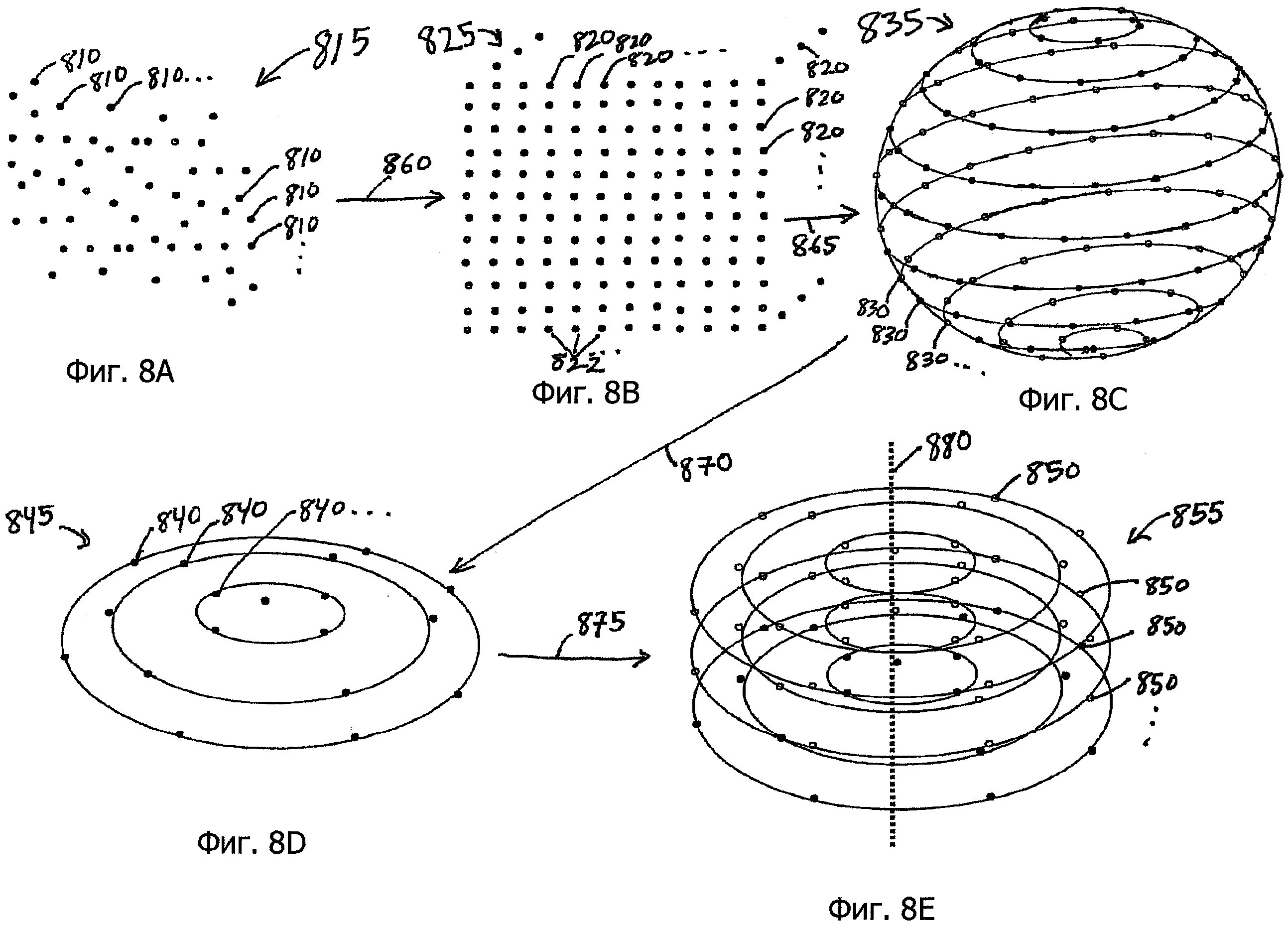
фиг.8А, 8В, 8С, 8D и 8Е - схематичные иллюстрации функции изображения, определенной на узлах, расположенных в различных конфигурациях, и отображений между ними, согласно осуществлению изобретения; и
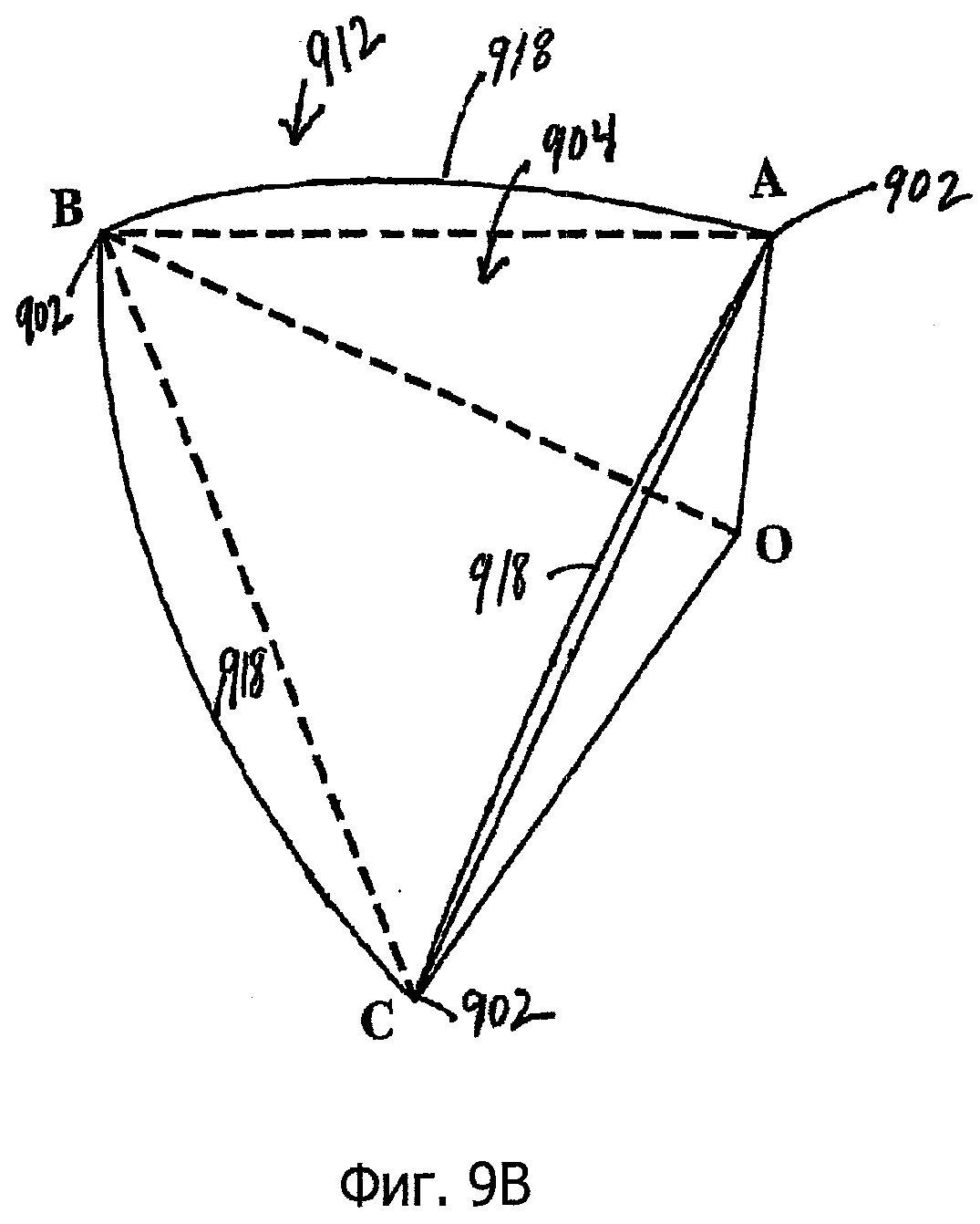
фиг.9А, 9В и 9С - схематичные иллюстрации этапов конструирования вычислительной сетки, согласно осуществлению изобретения.
Для простоты и ясности изображений элементы, показанные на чертежах, необязательно показаны в масштабе. Например, для ясности размеры некоторых элементов могут быть завышены относительно размеров других элементов. Кроме того, где это считается уместным, позиции на чертежах могут повторяться для обозначения соответствующих или аналогичных элементов на нескольких чертежах.
Подробное описание изобретения
Введение
В нижеследующем описании будут пояснены различные аспекты настоящего изобретения. Чтобы обеспечить полное понимание настоящего изобретения, при пояснении излагаются конкретные конфигурации и подробности. Однако специалисту в данной области техники также должно быть понятно, что настоящее изобретение можно применять на практике без конкретных подробностей, представленных в этой заявке. Кроме того, чтобы не мешать выявлению настоящего изобретения, хорошо известные признаки могут опускаться или упрощаться. Если специально не оговорено иное, очевидное из последующего рассмотрения, должно быть понятно, что на протяжении всего рассмотрения описания использование терминов, таких как «обработка», «вычисление», «расчет», «определение» или тому подобных, относится к действию и/или процессам компьютера или компьютерной системы, или аналогичного электронного вычислительного устройства, которое обрабатывает и/или преобразует данные, представленные в виде физических, например, электронных, величин в регистрах и/или запоминающих устройствах вычислительной системы в другие данные, аналогичным образом представляемые в виде физических величин в запоминающих устройствах, регистрах или других устройствах вычислительной системы, таких как устройства хранения, передачи или отображения информации. Термин «картина» или «дисплей» может использоваться в этой заявке для описания визуального представления и/или устройства для показа такого представления, и/или способа, или алгоритма для такого представления. Кроме того, термин «множество» может использоваться на всем протяжении описания для представления двух или большего количества составляющих, устройств, элементов, параметров и т.п.
Сейсмические данные могут включать в себя или представлять сейсмические волны (или, например, сигналы), которые отражаются и/или дифрагируют на прерывистых объектах и/или непрерывных горизонтах. Непрерывные горизонты могут включать в себя, например, границы между геологическими слоями. Прерывистые объекты могут включать в себя, например, малоразмерные дифрагирующие объекты, разрывы или малоразмерные трещины.
Сейсмические данные, собранные и/или вычисленные для построения сейсмического изображения, могут быть усложнены и обогащены информацией. Например, сейсмические данные могут включать в себя многочисленные составляющие, например времена пробега, удаления, зенитные углы, азимутальные углы, углы отражения, направления и т.д. Каждую точку изображения можно вычислить или определить, используя многочисленные составляющие. Каждая точка изображения может иметь значение для каждой из многочисленных составляющих. Однако может быть практически нецелесообразно отображать для пользователя одновременно все значения составляющих для всех этих составляющих. Например, если каждая составляющая представляется по отдельному измерению трехмерной (3D) картины, то не более трех из этих составляющих можно одновременно отображать для пользователя, или многочисленные значения составляющих можно использовать для создания трех составляющих трехмерной картины, и поэтому фактические значения составляющих источника не могут быть отображены. Стандартная картина может быть любым визуальным представлением пространственных свойств материального мира. В одном осуществлении стандартной трехмерной картиной можно представлять геофизическое пространство, используя, например, три составляющие на точку данных, такие как две декартовы составляющие местоположения точки данных и значение функции в каждой точке. В этом осуществлении функцию f изображения можно представлять в виде криволинейной трехмерной поверхности в декартовом пространстве, f=f(x,z), где x может быть поперечной координатой, и z может быть глубиной. В другом осуществлении все три составляющие для каждой точки данных трехмерной стандартной картины можно использовать для точного определения пространственного положения точки данных. Каждое значение функции f(x,y,z), где x и y могут быть двумя поперечными координатами, и z может быть глубиной, в каждой точке можно поочередно представлять одним из множества цветов или интенсивностью. В каждом из этих осуществлений стандартной картиной обычно показывается только поднабор многочисленных составляющих для предоставления общего или упрощенного обзорного вида исследуемой геофизической области.
Пользователю может потребоваться видеть дополнительные или другие составляющие или информацию, обычно непоказываемую на стандартной картине. Например, пользователю может потребоваться видеть данные об углах отражения и/или о направлениях в каждой точке, или в выбранной точке, или во множестве точек. Пара картин угла отражения и направления для точки, где картина направления имеет единственный полярный угол или узкий диапазон полярных углов, и картина отражения имеет большое количество полярных углов или широкий диапазон полярных углов, может показывать, что точка изображения лежит на линии разрыва. Поэтому может быть желательно одновременно видеть данные об угле отражения и о направлении, соответствующие точке изображения. Эти способы можно применять при геофизических исследованиях, используя сейсмограммы общего угла отражения и сейсмограммы общего направления. Другие характеристики могут определяться значениями конкретных составляющих.
Осуществлениями настоящего изобретения предоставляется способ отображения информации, отличающийся от способа отображения стандартной картиной, путем использования картин различных видов. Например, можно использовать «сферическую» картину (например, фиг.1 и 2) и «цилиндрическую» картину. Можно использовать другие геометрии, а не сферические и цилиндрические картины. При одном осуществлении сферической картины можно отображать дополнительные данные для единственной точки, тогда как при одном осуществлении цилиндрической картины можно отображать дополнительные данные для множества точек.
Картина может представлять функцию f. Функция может быть определена для одного или нескольких аргументов, например, зенитного и азимутального углов. Функция может иметь значения аргументов, для примера, обычно определяемые в виде f(θ,φ), где θ может быть зенитным углом, и φ может быть азимутальным углом. Например, сферическая картина может представлять значение функции (например, в зависимости от угла отражения на фиг.1; и в зависимости от направления на фиг.2), соответствующее каждой координате (например, различным аргументам, зенитному и азимутальному углам) сферы. Вся сферическая картина может соответствовать единственной точке на стандартной картине. Поэтому сферическая картина может представлять значение функции (например, в зависимости от угла отражения на фиг.1; и в зависимости от направления на фиг.2) для всех значений полярного угла, связанных с единственной точкой стандартной картины. Значение функции при всех полярных углах может быть важной информацией в случае, когда используют широкоазимутальные или полноазимутальные сейсмические данные (например, данные, собираемые при построении изображения по многим азимутальным углам). Сферическая картина может представлять другие функции изображения, такие как коэффициент отражения, амплитуда сейсмической волны или времена пробега. Вид дополнительных данных, воспроизводимых на сфере, может задаваться, программироваться и/или выбираться, или видоизменяться пользователем.
Цилиндрическая картина обычно представляет множество точек (например, линию, которая может быть вертикальной, наклонной, криволинейной и т.д.) стандартной картины (например, сейсмограммы). Осевое сечение цилиндрической картины может представлять меридиональную сейсмограмму, которая может быть набором данных, представляющим множество точек изображения, имеющих различные глубины или зенитные углы, и один и тот же азимутальный угол.
В одном осуществлении множество сферических картин, каждая из которых представляет единственную точку стандартной картины, может быть объединено для одновременного отображения множества таких точек (например, линии, которая может быть вертикальной, наклонной, криволинейной и т.д.). В одном осуществлении каждую из множества сферических картин можно уплощать или проецировать на двумерную (2D) плоскую поверхность, образующую плоский (например, круговой) диск. В одном осуществлении плоские диски, ограниченные двумерными криволинейными линиями, можно складывать в стопку или иным образом собирать или объединять для образования цилиндра (например, регулярного, наклонного, с криволинейной осью и т.д.), представляющего множество точек (например, вертикальную линию, наклонную линию, кривую и т.д.) стандартной модели или представления геометрии материального мира. Например, множество точек, показанных в стандартной модели, может соответствовать сейсмограмме изображения или другому объекту.
В соответствии с этой конструкцией каждая точка стандартной модели может соответствовать отдельной сферической картине. Каждая сферическая картина, в свою очередь, может соответствовать плоскому диску или другой плоской фигуре (например, уплощенной сфере). В свою очередь, каждый плоский диск может соответствовать точке на оси цилиндра (например, в виде нормального сечения цилиндра в точке), составленного сложением в стопку плоских дисков.
Пользователь может управлять видом сферических или цилиндрических картин. Например, пользователь может перемещать курсор или указатель мыши, или другой указатель устройства ввода для выбора или поиска вдоль длины (например, оси симметрии) цилиндрической картины. Например, когда пользователь выбирает точку или место на цилиндре (например, вдоль оси симметрии), то может отображаться разрез (например, плоская кривая), сферическая картина и/или точка стандартной модели, соответствующей ей. Пользователь может использовать данные для идентификации объектов, таких как подземные разрывы. Например, пользователь может выбирать сканированием точки изображения, чтобы осуществлять наблюдение и отображение пар картин направлений и углов отражения (или, например, удаления), соответствующих выбранным точкам изображения. Пользователь может осуществлять поиск для пар картин, где картина направления имеет единственный полярный угол или узкий диапазон полярных углов, и картина отражения имеет многочисленные полярные углы или широкий диапазон полярных углов. Такие пары картин могут показывать, например, что соответствующая точка изображения расположена на линии разрыва.
Полярный угол может быть, например, двумерным вектором (например, определенным зенитным и азимутальным углами). Зенитный угол представляет собой, например, угол между радиус-вектором (соединяющим центр сферы с этой точкой) и полярной осью сферы. Азимутальный угол представляет собой, например, угол между опорным направлением в экваториальной плоскости и проекцией радиус-вектора на экваториальную плоскость. В качестве варианта можно использовать другие углы, направления, ориентации, зависимости между ними и/или определения их.
Каждой из цилиндрической, сферической и стандартной картин может индивидуально показываться различная информация, соответствующая одним и тем же геологическим данным или одному и тому же подземному пространству. В некоторых осуществлениях, когда цилиндрическая, сферическая и стандартная картины отображаются одновременно (например, рядом), можно сравнивать информацию из любой картины. Например, в то время как пользователь сканирует разрез курсором, соответствующий указатель может сканировать стандартную картину для показа пользователю, какой геофизический участок выбирается.
В другом осуществлении пользователь может выбирать (например, щелчком кнопкой или подсвечиванием) геофизический участок стандартной картины, подлежащий отображению в виде сферы или цилиндра. Пользователь может приводить в действие устройство ввода (например, мышь или клавиатуру), чтобы воздействовать на, выбирать, подсвечивать или иным образом указывать точку сейсмического изображения или множество точек сейсмического изображения, соответствующих линии в физическом пространстве. В ответ на такое указание дисплей может осуществлять для пользователя отображение (например, на графическом пользовательском интерфейсе) представления указанных данных. Например, в одном осуществлении пользователь может показать нажатием кнопки мыши или иным образом указать координату или точку стандартной картины, и соответствующая сферическая или другая картина может появиться или «всплыть» (например, вблизи нее). Аналогичным образом пользователь может выбрать (например, перемещая курсор) линию или другое множество точек, и соответствующая цилиндрическая картина может «всплыть» (например, вблизи него). В системе, имеющей несколько мониторов, стандартная картина может отображаться на одном мониторе, а подробности вместе с конкретными данными могут показываться на втором мониторе или в новом отдельном окне того же самого монитора.
В других осуществлениях картины можно поворачивать, перемещать поступательно, сдвигать, разрезать на части, изгибать, масштабировать, окрашивать, увеличивать и/или иным образом перемещать или видоизменять.
Специалист в данной области техники может понять, что хотя осуществления изобретения описываются на примере сферы или сферической картины, можно использовать другие формы, например, эллипсоиды, торы, гиперболоиды, многогранник, которые могут симметричными или несимметричными и регулярными или нерегулярными. Специалисты в данной области техники могут понять, что, хотя осуществления изобретения описываются на примере плоских дисков или уплощенных сфер, можно использовать другие формы двумерных фигур, например, эллипсы и конические сечения других видов, многоугольные сечения или аппроксимации их и т.д. Специалисты в данной области техники могут понять, что, хотя осуществления изобретения описываются на примере цилиндров, можно использовать другие формы, например, конусы, призмы, пирамиды, многогранники и т.д., и/или геометрические формы, имеющие линию или плоскость симметрии.
Обратимся к фиг.8A, 8B, 8C, 8D и 8Е, на которых схематично показаны функция изображения, определенная на узлах, размещенных в различных конфигурациях, и преобразования между ними, согласно осуществлению изобретения. Конкретные фигуры и точки данных на каждой из фиг.8А-8Е и зависимости между ними не являются ограничивающими. Специалисты в данной области техники могут понять, что эти фигуры и элементы их являются только примерами, и что другие принципы, структуры, зависимости, математические соотношения и абстракции могут использоваться для осуществлений изобретения.
На фиг.8А показан набор 815 нерегулярных дискретных данных, представляющий функцию изображения, определенную на нерегулярных узлах 810. На фиг.8В показан набор 825 регулярных дискретных данных, представляющих функцию изображения, определенную на регулярных узлах 820 вычислительной сетки 822. На фиг.8С показана непрерывная криволинейная трехмерная поверхность 835, представляющая функцию изображения, определенную на расположенных по спирали узлах 830. На фиг.8D показана криволинейная плоская поверхность 845, представляющая функцию изображения, определенную на расположенных в плоскости узлах 840. Функция изображения может быть представлена на плоской поверхности 845 двумерной областью с криволинейной границей (например, такой как области 365 и 465 на фиг.3 и 4, соответственно). На фиг.8Е показано трехмерное тело 855, представляющее функцию изображения, определенную на узлах 850 цилиндрического тела. Набор 815 нерегулярных дискретных данных, набор 825 регулярных дискретных данных, непрерывная криволинейная трехмерная поверхность 835, плоская поверхность 845 и трехмерное тело 855 могут быть значениями функции изображения на нерегулярных узлах 810, регулярных узлах 820, расположенных на сфере по спирали узлах 830, расположенных в плоскости по кривой узлах 840 и узлах 850 цилиндрического тела, соответственно.
Функция изображения может представлять собой любые дополнительные или другие составляющие или информацию. Например, функция изображения может быть определена в зависимости от угла отражения, в зависимости от удаления и/или функции данных о направлении. Значение функции изображения может быть выражено, например, в виде интенсивности цвета на цветной карте.
Местоположения узлов из фиг.8C, 8D и 8Е обычно не согласуются с физическим местоположениям точек изображения, которым они соответствуют. Например, узел, расположенный относительно «правее» на непрерывной криволинейной трехмерной поверхности 835 из фиг.8С, может соответствовать большему азимутальному углу и необязательно более восточному физическому местоположению подземной или геофизической области. Например, множеством точек данных на фиг.8А и 8В описывается множество направлений для единственной физической точки в трехмерном пространстве. Эти направления расположены нерегулярно на фиг.8А и регулярно на фиг.8В. «Регулярно» расположенные узлы могут указывать на то, что горизонтальная линия на фиг.8В представляет, например, широтную линию при фиксированном зенитном угле и переменном азимуте. Аналогичным образом «регулярно» расположенные узлы могут указывать на то, что вертикальная линия на фиг.8В представляет, например, меридиональную линию или поднабор из меридиональной сейсмограммы при фиксированном азимуте и переменном зенитном угле, относящийся к единственной физической точке. Могут рассматриваться другие «регулярные» расположения узлов. Например, в качестве варианта регулярное расположение узлов может включать в себя узлы, расположенные на вершинах регулярного многогранника (например, двадцатигранника, который имеет 12 вершин и 20 граней), вписанного в сферу. Вершины регулярного многогранника могут быть первичными узлами регулярной сетки. Регулярную сетку можно детализировать, например, разбиением граней многоугольника на части геометрически правильной формы (но, например, необязательно равные) для образования других (например, дополнительных) узлов регулярной сетки. Для примера этот вариант осуществления описан более подробно при обращении к фиг.9А, 9В и 9С.
На каждой из фиг.8А, 8В, 8С и 8D обычным образом представлены данные функции изображения, соответствующие единственной точке (непоказанной) в физическом пространстве, и на фиг.8Е обычным образом представлены данные функции изображения, соответствующие множеству точек изображения (например, линии 880) в физическом пространстве. Например, трехмерное тело 855 может включать в себя множество плоских поверхностей 845, каждая из которых представляет точку изображения на линии физического пространства. Плоская поверхность 845 может иметь криволинейную двумерную линию или область для представления функции изображения в точке изображения. Например, центральные точки каждой из плоских поверхностей 845 могут быть сложены в стопку (например, вдоль линии 880) согласно местоположениям их соответствующих точек изображения на линии физического пространства.
Первое преобразование 860 можно использовать для преобразования входных данных из набора 815 нерегулярных дискретных данных в набор 825 регулярных дискретных данных. Первое преобразование 860 можно использовать для нормализации или регуляризации нерегулярных данных. Нет необходимости использовать первое преобразование 860, когда входные данные уже являются регулярными (например, определенными на регулярно разнесенных узлах системы координат, где каждый узел представляет точно определенный полярный угол, то есть, фиксированное направление в трехмерном пространстве).
Второе преобразование 865 можно использовать для преобразования входных данных из набора 825 регулярных дискретных данных в непрерывную криволинейную трехмерную поверхность 835. Используя набор 825 регулярных дискретных данных, второе преобразование 865 можно применять, чтобы получать непрерывное распределение функции изображения для единственной точки изображения на непрерывной криволинейной трехмерной поверхности 835. Данные, преобразуемые в непрерывную криволинейную трехмерную поверхность 835, могут быть представлены, например, на сферических картинах 100 и 200 из фиг.1 и 2.
Действие над входными данными с использованием в порядке следования первого и второго преобразований 860 и 865 можно назвать «гридингом». Действие над входными данными с использованием второго преобразования 865, но без первого преобразования 860, можно назвать «интерполяцией». Следовательно, интерполяция может быть подоперацией гридинга. Первое и второе преобразования 860 и 865 описаны в этой заявке более подробно, например, в разделе под названием «Сферический гридинг». Конструкция узлов 820, которые в совокупности могут быть названы «вычислительной сеткой» 822, описаны в этой заявке более подробно, например, в разделе под названием «Вычислительная сетка» и при обращении к фиг.9А, 9В и 9С. На фиг.9А, 9В и 9С пояснен принцип формирования регулярной сетки (например, вычислительной сетки 822 из фиг.8В). Регулярную сетку можно образовать на сфере. Сетка, изображенная на фиг.9А, 9В и 9С, имеет ячейки приблизительно одинаковой площади или по меньшей мере ячейки с близкими площадями. Предпочтительно, чтобы сетка не имела особенностей на полюсах сферы.
Третье преобразование 870 можно использовать для преобразования входных данных с непрерывной криволинейной трехмерной поверхности 835 в криволинейную двумерную поверхность плоской поверхности 845. Третье преобразование 870 может быть, например, преобразованием проекции непрерывной криволинейной трехмерной поверхности 835 или любым другим преобразованием, предназначенным для уплощения, или преобразования, или растягивания непрерывной криволинейной трехмерной поверхности 835 в плоскую поверхность 845. Как известно из уровня техники, преобразованием проекции можно описать сюръективное преобразование или «преобразование в». Преобразованием проекции можно описать функцию для преобразования данных из первого пространства координат (например, N-мерного) во второе (например, N-1-мерное) пространство координат. В качестве варианта третье преобразование 870 может быть, например, преобразованием растягивания. Преобразованием растягивания можно проецировать трехмерную поверхность в двумерную поверхность путем «разворачивания» или «развертывания» трехмерной поверхности. Третье преобразование может включать в себя другие или дополнительные проекции, такие как, например, цилиндрические, псевдоцилиндрические, смешанные, конические, псевдоконические, азимутальные (проекции на плоскость), конформные, равные по площади, эквидистантные, гномонические, ретроазимутальные, компромиссные проекции или подобные.
Четвертое преобразование 875 можно использовать для преобразования входных данных у набора плоских поверхностей 845 в трехмерное тело 855. Четвертое преобразование 875 можно использовать, чтобы получать непрерывное распределение функции изображения для множества точек изображения (например, соответствующих линии в физическом трехмерном пространстве) на трехмерном теле 855. Данные, преобразованные в трехмерное тело 855, могут быть представлены на цилиндрических картинах 300 и 400 из фиг.3 и 4.
Осуществления изобретения включают в себя действие над набором дискретных данных (например, над наборами нерегулярных или регулярных дискретных данных 815 и 825, соответственно), представляющим единственную точку или множество точек изображения физического трехмерного пространства, с помощью последовательности преобразований, в определенном порядке (например, с помощью первого преобразования 860, второго преобразования 865, третьего преобразования 870 и/или четвертого преобразования 875), для получения непрерывной криволинейной трехмерной поверхности 835 (например, сферы) и трехмерного тела 855 (например, цилиндра), соответственно.
Специалисты в данной области техники могут понять, что преобразования, описанные в этой заявке, представляют собой только один пример, и что другие преобразования, функции, преобразования или зависимости можно использовать для преобразования данных между узлами различных конфигураций, например, нерегулярными узлами 810, регулярными узлами 820, расположенными по спирали узлами 830, расположенными в плоскости узлами 840 и/или расположенными на цилиндре узлами 850. Специалисты в данной области могут понять, что для выполнения эквивалентного действия (действий) любые преобразования можно объединять или разделять с получением других и/или иного количества преобразований. Специалисты в данной области техники могут понять, что узлы и конфигурации их, описанные в этой заявке, представляют собой только один пример, и что конфигурации, или расположения, или узлы, отличные от нерегулярных узлов 810, регулярных узлов 820, расположенных на сфере по спирали узлов 830, расположенных на плоской поверхности узлов 840 и/или расположенных на цилиндре узлов 850, можно использовать для представления эквивалентной информации.
Осуществлениями изобретения предоставляются система и способы для отображения непрерывных данных полноазимутального изображения в угловой области и/или данных изображения в области широкодиапазонных удалений в заданной точке изображения набора дискретных данных, такого как набор 815 данных из фиг.8 (например, на сферических картинах 100 и 200 из фиг.1 и 2) или набор точек изображения (например, на цилиндрических картинах 300 и 400 из фиг.3 и 4). Данные полноазимутального изображения в угловой области и/или изображения в области широкодиапазонных удалений из наборов 815 и 825 дискретных данных могут включать в себя, например, сейсмограммы общей точки изображения в угловой области и сейсмограммы общей точки изображения в области удалений, соответственно. Осуществления изобретения включают в себя прием (например, по азимутам) набора дискретных данных, преобразование наборов дискретных данных в непрерывную криволинейную трехмерную поверхность 835, например, образование трехмерных сейсмограмм общей точки изображения в областях направления или углов отражения. Осуществления изобретения включают в себя использование для каждой точки изображения, например, способа сферического гридинга или других способов или методик интерполяции и экстраполяции данных на сферическую или иную криволинейную поверхность. Специалисты в данной области техники могут понять, что иные способы, а не сферический гридинг (например, первое и второе преобразования 860 и 865 на фиг.8) или интерполяцию (например, только второе преобразование 865), можно использовать для получения сферических, цилиндрических или иной формы картин, предназначенных для представления широкоазимутальных данных, описанных в этой заявке. Осуществления изобретения включают в себя проецирование данных, представленных на криволинейной поверхности, на плоскую поверхность. В случае сейсмограммы точек изображения (например, сейсмограммы общей точки изображения в угловой области) осуществления изобретения включают в себя объединение наборов данных, связанных с несколькими плоскими поверхностями, в трехмерное тело, такое как круговой цилиндр или другой цилиндр. Специалисты в данной области техники могут понять, что могут использоваться иные формы, а не сферы и цилиндры.
Осуществления изобретения включают в себя способ преобразования зависящих от угла данных о точках изображения в сферическую или иную криволинейную поверхность с использованием, например, сферического гридинга, интерполяции/экстраполяции или других способов. Осуществления изобретения включают в себя отображение зависящих от угла данных о точках изображения на сферической или иной криволинейной поверхности. Данные функции изображения (например, коэффициент отражения) могут отображаться как функция углов направления, углов отражения и/или удалений. Осуществления изобретения включают в себя проецирование или разложение данных, определенных на криволинейной поверхности, в данные, определенные на плоской поверхности. Осуществления изобретения также включают в себя цилиндрические картины для одновременного отображения данных изображения для множества, например, сейсмограмм точек изображения (например, набора точек изображения, расположенных вдоль вертикальной линии в заданном горизонтальном положении). Как описано в упомянутой заявке № 11/798996 на патент США, полноазимутальные сейсмограммы в угловой области (например, сейсмограммы общей точки изображения в угловой области) можно использовать для образования сферической спиральной геометрии. Сейсмограммы этих видов могут быть названы «спиральными сейсмограммами общей точки изображения в угловой области», при этом сейсмограмма направления может быть названа «спиралью-Н», и сейсмограмма отражения может быть названа «спиралью-О».
Специалисты в данной области техники могут понять, что осуществления настоящего изобретения можно применять в любой системе обработки сейсмических данных и построения изображений. Осуществления настоящего изобретения можно использовать для получения картин и визуализаций в различных областях или сферах деятельности, таких как, например, разведка и добыча нефти и газа, построение модельного изображения на небольшой глубине для экологических исследований (например, с использованием данных, собранных сейсмическим методом и/или радиолокационной станцией, обнаруживающей объекты под землей), строительство (например, для идентификации местоположений труб), охрана и обеспечение безопасности конструкций (например, для идентификации отверстий и каналов), построение медицинских изображений (например, с использованием компьютерной томографии, магнитной резонансной томографии и ультразвуковых приборов), неразрушающий контроль материалов, контроль скрытых предметов, исходя из соображений безопасности (например, национальной безопасности), морские гидролокационные станции и антенные и радиолокационные системы.
Предложенные картины
Обратимся к фиг.1-4, на которых схематично показаны картины или визуализации непрерывных данных согласно осуществлениям изобретения. На фиг.1 и 2 представлены сферические картины, относящиеся к конкретной точке изображения, согласно одному осуществлению. На фиг.3 и 4 представлены цилиндрические картины, относящиеся к конкретной сейсмограмме точек изображения, согласно одному осуществлению. Данные, показанные на фиг.1-4, могут быть дополнительными данными к данным, обычно показываемым на стандартных картинах. Например, эти картины могут формироваться в ответ на запрос пользователя о получении «более детального обзора» или дополнительной информации, относящейся к одной или нескольким точкам данных геофизического района. Дополнительная информация может включать в себя, например, функцию изображения угла отражения, удаления и данные о направлении для одной или нескольких точек данных.
Картины 100, 200, 300 и 400 можно формировать, например, преобразуя данные, показанные на фиг.8А, 8В, 8С, 8D и 8Е, хотя можно использовать другие способы образования этих картин. Входными данными для картин может быть набор 815 или 825 дискретных данных, например, функции изображения, определенной на множестве дискретных узлов 810 и 820 из фиг.8 (например, называемых «контрольными точками»). Местоположения узлов 810 и 820 можно определять благодаря дискретной геометрии. Узлы 810 и 820 могут быть соответственно нерегулярно и регулярно разнесены в системе координат (например, в системе спиральных координат).
Осуществления изобретения могут включать в себя способ гридинга (например, с использованием первого преобразования 860 из фиг.8) для нормализации набора 815 нерегулярных дискретных данных с получением набора 825 регулярных дискретных данных. Набор 825 регулярных дискретных данных можно интерполировать (например, используя второе преобразование 865), чтобы получать непрерывную криволинейную трехмерную поверхность 835. Непрерывная криволинейная трехмерная поверхность 835 может представлять функцию изображения в единственной точке изображения.
В одном осуществлении набор 825 дискретных данных из фиг.8 может быть преобразован с помощью второго преобразования 865 на непрерывную поверхность путем моделирования упругого изгиба тонкой оболочки, усиленной «пружинами» или упругими структурами. В одном осуществлении «пружины» могут быть абстракциями данных, поддерживающими узлы оболочки в дискретных контрольных точках. Например, «пружины» могут быть сжаты или растянуты для сдвига, «сжатия» или переориентации узлов 810 и/или 820, чтобы лучше обеспечивалось соответствие деформированной оболочки значениям данных в опорных узлах, таких как расположенные по спирали узлы 830 непрерывной криволинейной трехмерной поверхности 835, описанной в данной заявке. Специалисты в данной области техники могут понять, что другие способы, помимо сферического гридинга и/или интерполяции, можно использовать для получения непрерывной функции изображения, описанной в данной заявке.
В некоторых осуществлениях для способа гридинга высокая точность не требуется. Вместо нее способ гридинга можно приспособить для достижения баланса между точностью и непрерывностью гридинга. «Пружины» можно использовать для обеспечения лучшей непрерывности гридинга. Можно понять, что описанные в данной заявке «пружины» и использование упругости их являются абстракциями данных и вычислительными абстракциями и могут быть представлены сопоставимыми программами из системы программного обеспечения, или наборами команд, математическими уравнениями, значениями данных и/или визуальными представлениями.
В некоторых осуществлениях, когда контрольные точки или узлы 810 и/или 820 сдвигают по направлениям вдоль линий приема или поперек линий приема, может иметься вариант «сжатия» вычислительной сетки 822 (и, например, соответствующих или сферических картин 100 или 200 из фиг.1 и 2) при преобразовании дискретных узлов 810 и/или 820 в непрерывную криволинейную трехмерную поверхность 835, которая лучше соответствует реальным данным изображения, такую как сфероид или трехосный эллипсоид с тремя несовпадающими осями (например, косой эллипсоид).
В некоторых осуществлениях «сжатие» может включать в себя преобразование, деформирование, корректировку, изменение размеров, изменение конфигурации или другие операционные действия по изменению формы непрерывной криволинейной трехмерной поверхности 835 и/или вычислительной сетки 822 (например, описанной в данной заявке), используемые для получения заданной формы.
В одном осуществлении набор дискретных данных может быть определен на дискретных узлах спиральной геометрии, как описано, например, в заявке US 11/798996. Например, в случае сферической спиральной дискретизации местоположение входных точек можно описать единственным параметром, например, нормированной площадью, образуемой спиральной катушкой, или нормированной длиной дуги спирали. Способы отображения могут включать в себя сферический гридинг или другие методы интерполяции или экстраполяции, такие как, например, локальная сферическая интерполяция, или преобразование Фурье на сферической поверхности. Этими способами можно преобразовывать функцию изображения, определенную на дискретных регулярных или нерегулярных узлах 810 и/или 820, в сферическую или иную непрерывную криволинейную трехмерную поверхность 835 в случае непрерывного распределения функции изображения, определенной на протяжении соответствующей (например, «сжатой») криволинейной поверхности.
Способы гридинга, описанные в данной заявке, являются не создающими ограничения примерами многих возможных методов преобразования набора 815 и/или 825 дискретных данных в непрерывную криволинейную трехмерную поверхность 835.
Можно использовать другие способы гридинга, отображения и/или преобразования.
Сферический гридинг
Задача сферического гридинга
«Нормализацию» можно отнести к примеру преобразования нерегулярных данных в набор регулярных данных (например, с использованием первого преобразования 860). «Интерполяцию» можно отнести, например, к использованию дискретных данных для получения непрерывного распределения функции изображения (например, с использованием второго преобразования 865). «Гридинг» можно отнести, например, к объединенным этапам нормализации и интерполяции, выполняемым, например, в этом порядке.
Осуществления изобретения могут включать в себя интерполяцию или преобразование набора дискретных данных, такого как наборы 815 и 825 данных из фиг.8, функции изображения в непрерывную функцию изображения на непрерывную криволинейную трехмерную поверхность, такую как поверхность 835 (например, с использованием первого и/или второго преобразований 860 и 865).
Дискретно определяемая функция изображения может быть определена на входной сетке узлов 810 или 820. Когда узлы 810 входной сетки являются нерегулярными, стандартизованную или равномерную сетку можно использовать для регуляризации или нормализации входной сетки, чтобы получать выходную сетку узлов 820, определяющих непрерывную функцию изображения. Например, данные на входной сетке, которая отличается от равномерной сетки, можно корректировать, чтобы приводить в соответствие (например, используя первое преобразование 860). Например, входная сетка может быть системой спиральных координат. Выходная сетка может быть обычной сферической сеткой с постоянными разрешениями по зенитному и азимутальному углам или любой другой обычной сеткой визуализации на сферической поверхности или другой криволинейной поверхности. Можно использовать другие сетки.
Осуществления изобретения включают в себя способ гридинга для интерполяции функции изображения в точке на непрерывную сферическую, эллипсоидальную или иную криволинейную трехмерную поверхность 835 (например, с использованием второго преобразования 865). Отображение криволинейной трехмерной поверхности 835 можно осуществлять в виде сферических картин 100 и 200 на фиг.1 и 2, представляющих данные о функции изображения угла отражения и направлении, соответственно, для единственной точки.
Интерполированные функции изображения для каждой точки можно уплощать или проецировать на криволинейную двумерную поверхность плоской поверхности 845 (например, используя третье преобразование 870) для единственной точки.
Множество криволинейных двумерных плоских поверхностей 845, каждое из которых представляет функцию изображения в точке, можно сложить в стопку вдоль линии 880, чтобы образовать цилиндрическое или другое трехмерное тело 855 (например, используя четвертое преобразование 875), представляющее функцию изображения во множестве точек. Индикацию трехмерного тела 855 можно осуществить в виде картин, таких как цилиндрические картины 300 и 400 на фиг.3 и 4, представляющие данные о функции изображения угла отражения и направлении, соответственно, для множества точек. Положение, в котором каждую из плоских поверхностей 845 складывают в стопку вдоль линии 880, может, например, соответствовать относительному пространственному расположению точки изображения, представляемой посредством этого. Поэтому пользователь может сканировать линию 880 по направлению (например, «вверх») для индикации разрезов цилиндрической картины (например, в виде плоских поверхностей 845 или соответствующих трехмерных поверхностей 835, не уплощенных обратным преобразованием 870) функции изображения в различных точках изображения материального мира в соответствующем (например, «вверх») направлении.
Исходная функция изображения может быть определена в дискретных контрольных точках (например, на нерегулярных или регулярных узлах 810 и 820). Осуществлениями изобретения предоставляются первое 860 и/или второе 865 преобразования для получения непрерывного распределения функции изображения на криволинейной трехмерной поверхности 835 по входным точкам из набора 815 или 825 дискретных данных. Составляющие полярных углов (например, зенитный и азимутальный углы) входных точек (например, контрольных) могут быть представлены, например, в системе декартовых координат или системе сферических координат (например, на узлах сферической или эллипсоидальной спирали) или в других системах координат. Входные точки могут иметь любые местоположения, могут быть регулярно или нерегулярно разнесены, или могут быть расположены в любом надлежащем порядке или любой последовательности. Выходная функция может быть непрерывной функцией изображения, определенной в любой точке или во всех точках сферической или эллипсоидальной поверхности, или во всех точках части поверхности (например, такой как сферическая полусфера или «эллипсоидальная шапка»). Можно понять, что различные положения на криволинейной трехмерной поверхности представляют единственную физическую точку в трехмерном пространстве и множество направлений, соответствующих точке. В контрольных точках (например, на нерегулярных узлах 810) выходные значения могут совпадать или почти совпадать с входными данными. В некоторых осуществлениях регулирующий параметр (например, такой как веса данных в контрольных точках) может быть применен к интерполирующему преобразованию (например, как часть первого преобразования 860) для сохранения выгод от непрерывности (например, гладкости) распределения и точности решения для функции изображения в контрольных точках (например, достижения наилучшего соответствия при согласовании входных и выходных данных интерполирующей функции). В некоторых осуществлениях выходная функция изображения может быть получена точно согласованной с контрольными или входными данными. В качестве варианта нет необходимости в точном согласовании выходной функции изображения с входной функцией изображения. В таких осуществлениях, когда требование точного соответствия является менее строгим, выходная функция изображения может быть более гладкой, а непрерывное распределение преобразований функции на протяжении криволинейной поверхности может быть с меньшими градиентами.
Гридинг может включать в себя моделирование упругого изгиба тонкой оболочки или вычислительной сетки 822 из фиг.8В, усиленной пружинами. Эта модель является только одним из различных возможных приближений, и можно использовать другие модели и приближения. Специалисты в данной области техники могут понять, что оболочка и пружины являются абстракциями, и что не имеется реальной физической структуры, которая содержит оболочку и пружины. Абстрактные пружины могут быть расположены в узлах контрольных точек. Обычно точное согласование в контрольных точках между интерполированной (например, выходной) функцией и входной функцией не требуется. Способ сферического гридинга можно использовать для интерполяции данных изображения в случае, например, когда угловая область полностью не освещена.
Сферический гридинг в локальной угловой области
Система падающих и отраженных волн (или, например, пар лучей), определяющая геофизический район, может быть задана подсистемами направления и отражения локальной угловой области (ЛУО). Система направления может включать в себя две составляющие полярных углов, описывающие зенитный (например, наклон) и азимутальный углы нормали к элементу отражающей поверхности. Система отражения может включать в себя две составляющие, описывающие угол раскрыва между падающим и отраженным лучами и азимут раскрыва или в качестве варианта величину удаления и азимут удаления, где удаление точно определено на земной поверхности. Подсистемы направления и отражения совместно могут определять положение каждой точки изображения в локальной угловой области.
Для каждой точки изображения можно образовать две системы построения изображения в угловой области, например, подсистемы направления и отражения. Можно использовать отличное от двух количество систем построения изображения в угловой области. Обе системы построения изображения могут быть определены на криволинейной поверхности, такой как единичная сфера (например, подсистема отражения на фиг.1; система направления на фиг.2). Точка на криволинейной поверхности может быть определена двумя составляющими полярного угла (например, зенитным и азимутальным углами). Каждая точка в системе направления на сферической поверхности может соответствовать определенному направлению внутренней нормали к отражающему элементу при всех возможных подытоженных углах отражения и их азимутах. Каждая точка в системе отражения на сферической поверхности может соответствовать определенным углу раскрыва и азимуту раскрыва при всех возможных подытоженных направлениях нормали пары лучей.
Можно использовать другие подсистемы, углы, составляющие или зависимости, вытекающие из них.
Принципы сферического гридинга
Термин «интерполяция» может использоваться, например, для описания значений функции оценки в точках (например, произвольных или точно определенных) между узлами, когда узлы или контрольные точки могут быть расположены равномерно или регулярно. Термин «гридинг» может использоваться, например, для описания интерполяции, когда узлы могут быть расположены нерегулярно. Поэтому гридинг может быть более общей формой интерполяции, а интерполяцию можно рассматривать как этап процедуры гридинга. В задаче интерполяции функция может быть определена на равномерно (или, например, по меньшей мере на регулярно) разнесенных по сетке узлах n-мерного пространства. В задаче гридинга входные точки могут быть разнесены нерегулярно (например, нет необходимости в том, чтобы они были на узлах сетки). В одном осуществлении способа гридинга входная сетка может не существовать, а входные контрольные точки могут быть неупорядоченной или случайной совокупностью точек в бесконечном (или, например, ограниченном) пространстве. В этом осуществлении способом гридинга можно получать непрерывное распределение функции, оценивающей все точки бесконечного пространства.
Процедура гридинга может включать в себя образование регулярной вычислительной сетки, например 822 (и, например, значений функции изображения, оцененной на расположенных по спирали узлах 830), и интерполяцию функции изображения между узлами 830 сетки для получения непрерывной выходной функции изображения. Входная функция изображения может точно, или как вариант приблизительно, соответствовать выходной функции изображения. Когда входные и выходные данные приводят в соответствие, согласуя их не очень точно, выходные данные можно подобрать, чтобы они были более непрерывными (например, имеющими меньшее количество разрывов и/или менее резкие разрывы).
При формировании регулярной вычислительной сетки 822 неизвестными могут быть узловые значения функции изображения. Между узлами поведение функции можно определять, например, интерполирующими многочленами. Чтобы найти узловые значения, энергию поверхности, определяемую функцией изображения, можно минимизировать, например, точно учитывая контрольные значения (например, чтобы получить точные выходные значения в контрольных точках) или используя дополнительные члены энергии (например, для большей непрерывности).
Когда осуществляют отображение функции изображения на поверхности, такой как непрерывная криволинейная трехмерная поверхность 835, например, в виде тонкой упругой оболочки, упругие смещения оболочки можно моделировать функцией изображения, и энергию на единичную площадь (например, удельную энергию) можно аппроксимировать квадратом радиуса кривизны оболочки. Поверхность, определяемая функцией изображения (например, имеющая минимизированную энергию), может быть упруго деформированной поверхностью, которая первоначально (например, до деформирования) имеет сферическую, эллипсоидальную или другую криволинейную форму. На местах контрольных точек данных поверхность может поддерживаться предварительно растянутыми пружинами. В таких осуществлениях входные данные могут быть приблизительно согласованными. В качестве варианта нормальные смещения могут быть точно определены в контрольных точках. В таких осуществлениях входные данные могут быть точно согласованными.
После нахождения значений сетки в узлах 820, необходимых для получения, например, вычислительной сетки 822, те же самые интерполирующие многочлены можно использовать для интерполяции, чтобы оценивать значения функции изображения в произвольных точках между регулярно разнесенными узлами 820 вычислительной сетки 822, например, на узлах 830 спиральной геометрии или на других узлах. Следовательно, этапы интерполяции, например, получения вычислительной сетки 822 и интерполяции функции изображения на всем протяжении сетки, обычно являются связанными.
Гридинг на протяжении плоской или криволинейной поверхности (сферической, эллипсоидальной и т.д.) может обеспечить значения функции на расположенных по спирали узлах 830 или в контрольных точках, а также частные производные (составляющие градиента) функции в контрольных точках. В случае эллипсоидальной поверхности частные производные функции в контрольных точках могут быть производными функции изображения по зенитному углу при постоянном азимуте, по азимуту при постоянном зенитном угле или по азимуту при постоянной вертикальной координате (например, которые могут быть другим осуществлением в случае косого эллипсоида). Кроме того, производная входной функции может быть определена по любому произвольному направлению на криволинейной поверхности.
Вычислительная сетка
Сложность вычислительной сетки, используемой в осуществлениях изобретения, такой как вычислительная сетка 822, может определяться, например, количеством уровней рекурсии, используемых для образования сетки. Сетка может быть образована на единичной сфере или любом другом n-мерном пространстве. Когда трехмерная криволинейная поверхность (например, эллипсоид) отличается от единичной сферы, сетку можно образовать на единичной сфере и затем преобразовать в другую форму (например, эллипсоидальную).
Обратимся к фиг.9А, 9В и 9С, на которых схематично показаны этапы построения вычислительной сетки согласно осуществлениям изобретения, такой как вычислительная сетка 822, в соответствии с осуществлением изобретения. Вычислительная сетка 822 (например, порожденная сетка) является регулярной и может быть или может не быть равномерной. Конкретные фигуры и способ, описанные при обращении к фиг.9А-9С, не являются ограничивающими. Специалисты в данной области техники могут понять, что эти фигуры и элементы их являются только примерами, и что другие способы, структуры, зависимости, математические соотношения и абстракции можно использовать для осуществлений изобретения.
В одном примере осуществления вычислительная сетка 822 (фиг.8С) может быть первоначально образована на основании многогранника 900 (фиг.9А), такого как правильный двадцатигранник с вершинами 902 (например, 12), треугольными гранями 904 (например, 20) и ребрами 906 (например, 30), вписанного, например, в сферу 910. Эта геометрия может соответствовать нулевому уровню рекурсии при образовании вычислительной сетки, такой как вычислительная сетка 822. Можно использовать другие формы, многогранники и количество их.
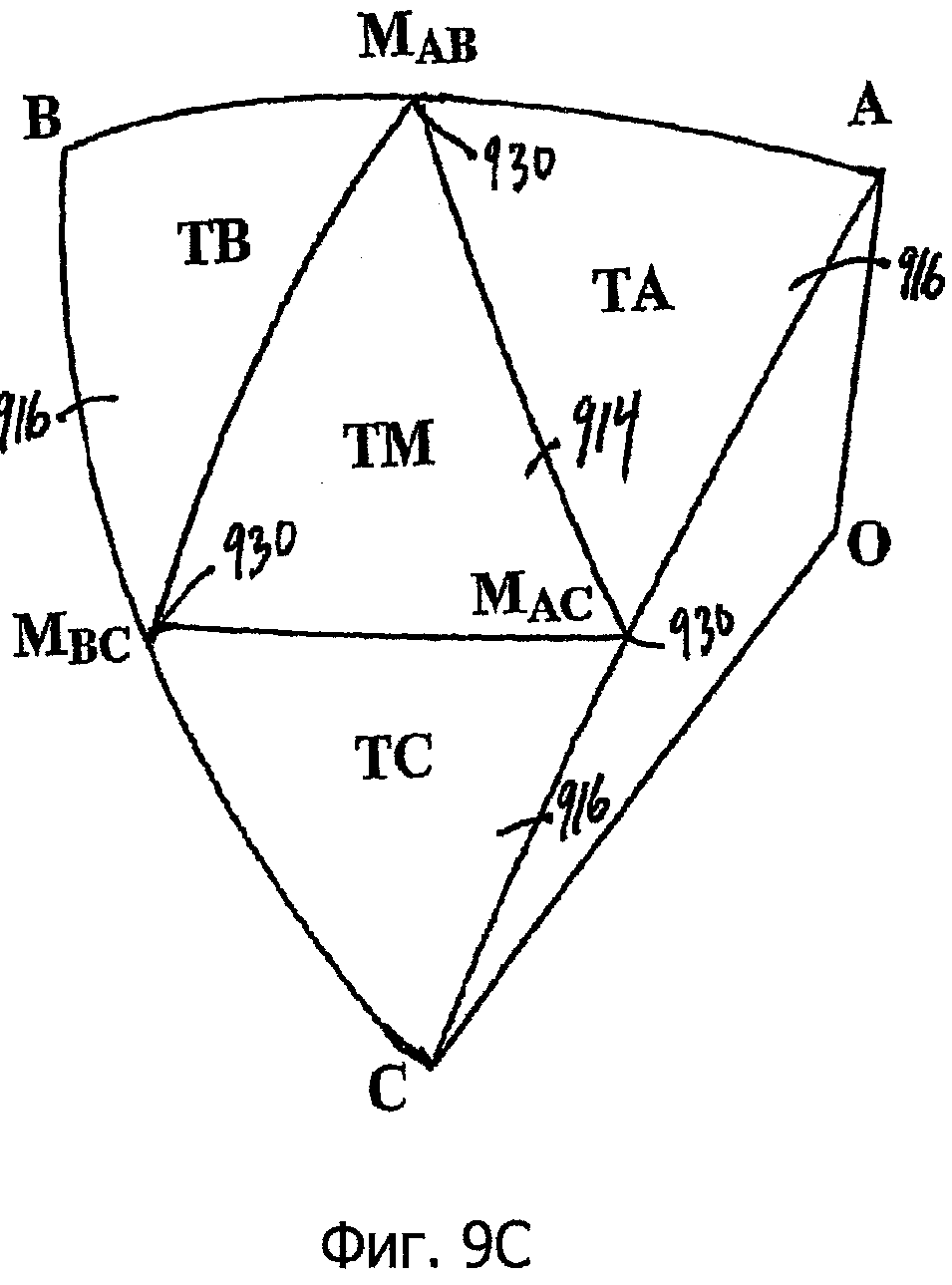
Для получения следующего уровня рекурсии, фиг.9В, плоские треугольные грани 904 можно заменить сферическими треугольниками 912 (например, имеющими криволинейные грань и/или ребра). Например, точки А, В и С являются вершинами 902 произвольно выбранной одной из треугольных граней 904. Точка О представляет центр сферы 910, и линии ОА, ОВ и ОС являются радиусами сферы 910. Линии АВ, ВС и СА, ребра треугольных граней 904 многогранника 900 (например, двадцатигранника) могут быть заменены криволинейными приближениями линий 918, такими как дуги «большого круга» (или геодезические кривые).
Для получения следующего уровня рекурсии, фиг.9С, каждый сферический треугольник АВС 912 можно разделить медианами на производные сферические треугольники (например, четыре): периферийные треугольники 916 (например, три) с одной и той же площадью, обозначенные ТА, ТВ и ТС, и центральный треугольник 914 (например, один) с другой площадью, обозначенный ТМ на фиг.9С. Например, на фиг.9С новые точки 930, MAB, MBC и MAC, например, центры сферических дуг, АВ, ВС и АС соответственно, могут образовывать дополнительные вершины 902, треугольные грани 904 и ребра 906, образующие новый многогранник, например, отличный от многогранника 900 (например, имеющий большее количество вершин, граней и ребер). Каждая новая грань 906 может образовывать дополнительный узел 930, например, дающий многогранник, например, с 42 узлами (конечно, можно использовать другое количество узлов).
Такую процедуру можно повторять много раз, например, каждый раз повышая на единицу уровень рекурсии.
На последнем (например, наивысшем) уровне рекурсии сферические треугольники 912 можно аппроксимировать плоскими треугольными гранями 904. Гридинг можно моделировать изгибными деформациями трехмерной пространственной упругой оболочки, состоящей из плоских треугольных граней 904 (например, соответствующих последнему уровню рекурсии). По мере увеличения числа рекурсий многогранник 900 приближается к сфере 910 из фиг.9А. На определенном уровне рекурсии (например, 4 или 5, хотя можно использовать другие числа) поверхность многогранника 900 можно определить как достаточно близкую к сферической.
Вершины 902 многогранника 900 из фиг.9А могут быть узлами 820 вычислительной сетки 822 из фиг.8В. Сферическую оболочку можно моделировать, основываясь на предварительно нагруженных пружинах, расположенных в контрольных точках. Поэтому нет необходимости в том, чтобы местоположения пружин обязательно совпадали с узлами сетки. Направление воздействия, оказываемого пружиной, может быть нормальным к сферической или эллипсоидальной поверхности в контрольной точке. Упругие смещения в узлах оболочки можно рассчитать, например, методом конечных элементов.
Узлы 830 можно нумеровать глобально, например, определенным образом: сначала на «северном полюсе», имеющем наибольшую координату z, затем следуют узлы северной полусферы, имеющей следующий уровень z и другие уровни z, после этого на экваторе, на уровнях южной полусферы и, наконец, на южном полюсе, имеющем наименьшую координату z. Этот способ нумерации может дать небольшую или минимальную ширину полосы разрешающей матрицы. Можно использовать другие нумерации и другие способы глобальной нумерации.
Нет необходимости одновременно анализировать всю сферу или эллипсоид. В некоторых осуществлениях входные данные (например, контрольные точки) могут находиться в определенном диапазоне зенитных углов, например, в котором не превышается заданное максимальное значение зенитного угла. В таких осуществлениях можно анализировать только часть полной поверхности (например, сферическую или эллипсоидальную шапку).
В осуществлениях, в которых подсистема отражения включает в себя значение удаления и азимут удаления (например, вместо угла раскрыва и азимута раскрыва), гридинг можно выполнять на гладкой (например, плоской) поверхности (например, вместо сферической поверхности). Поскольку данные угловой сейсмограммы обычно соответствуют различным направлениям в точке изображения или в наборе точек изображения (например, вдоль вертикальной линии), различные направления в единственной точке могут быть представлены криволинейной поверхностью, такой как сферическая поверхность. В отличие от этого сейсмограмма общих удалений (или, например, конкретное физическое местоположение по глубине ее) соответствует различным поперечным сдвигам между источником и приемником на земной поверхности. Эти сдвиги обычно имеют, например, две декартовы составляющие, x и y, и земная поверхность представляется плоской или гладкой поверхностью.
Северная и южная полусферы представляют собой относительные термины, описывающие области выше и ниже экватора (например, самой широкой окружности ориентированного тела), соответственно. Точно так же такие термины, как экватор, меридиан, юг, север, вертикальный, горизонтальный, поперечный, перпендикулярный или другие ориентационные термины являются относительными терминами, зависящими от местонахождения наблюдателя или места наблюдения.
Сферическая картина
Снова обратимся к фиг.1 и 2, на которых показаны сферические картины, относящиеся к конкретной точке изображения, для подсистем отражения и направления, соответственно. Выходные данные для картин 100 и 200 (например, непрерывной криволинейной трехмерной поверхности 835 из фиг.8С) могут быть точно определены на узлах сферической или эллипсоидальной поверхности (например, расположенных по спирали узлах 830 из фиг.8С). Форма картин 100 и 200 может быть определена строением вычислительной сетки 822 из фиг.8В (например, описанной при обращении к фиг.9А, 9В и 9С). Картины могут быть, например, непрерывными сферическими или эллипсоидными поверхностями, или участками их (например, шапкой). В некоторых осуществлениях имеется множество или диапазон цветов, которые соответствуют диапазону значений функции изображения. Поверхности картин могут иметь цвет или другой визуальный признак в каждой точке, соответствующей значению функции изображения в этой точке.
На фиг.1 и 2 различные цвета представлены различным образом заштрихованными (например, заштрихованными наискось) областями 165 и 265, соответственно. Картина может обеспечивать численные выходные значения (например, соответствующие характерному значению цвета) в любой точке криволинейной поверхности, например, когда точка выбирается или подсвечивается пользователем. Картина может обеспечивать входные значения, соответствующие интерполированным или прошедшим гридинг, отображаемым выходным значениям, например, для сравнения входных и выходных значений в контрольных точках.
Точность гридинга и визуализации можно определять, например, сложностью вычислений и сложностью визуализации. Сложность вычислений может быть числом уровней рекурсии вычислительной сетки 822. Сложность визуализации может быть аналогичным числом, например, разбиений на секции сетки графических изображений. Обычно эти два числа совпадают или являются близкими. Картины можно поворачивать, сдвигать, масштабировать, увеличивать, секционировать, переворачивать или иным образом преобразовывать или перемещать поступательно.
Цилиндрическая картина
Снова обратимся к фиг.3 и 4, на которых показаны цилиндрические картины 300 и 400, каждая из которых относится ко множеству точек изображения, для подсистем отражения и направления, соответственно. Каждую из цилиндрических картин 300 и 400 можно образовать в виде сборки из многочисленных плоских дисков (например, криволинейных двумерных плоских поверхностей 845 из фиг.8D при четвертом преобразовании 875). Каждый плоский диск можно образовать проецированием непрерывной криволинейной трехмерной поверхности 835 (например, сферы, эллипсоида или иной трехмерной криволинейной поверхности) на плоскость или двумерное пространство. Каждая криволинейная трехмерная поверхность может представлять точку (например, имеющую физическое местоположение в системе декартовых координат). Таким образом, каждое трехмерное тело или цилиндрические картины 300 и 400 могут представлять множество точек (например, каждая из которых имеет единственную глубину). Цилиндрические картины могут представлять точки изображения, определяемые иными координатами, а не глубиной. В одном осуществлении цилиндрические картины 300 и 400 могут показывать, по существу, одновременно множество точек изображения (например, сейсмограмму) в виде объединенной картины. Например, каждая картина 300 и 400 может соответствовать набору из двух или большего количества точек изображения с, по существу, одним и тем же поперечным положением и, по существу, различными глубинами.
Рассмотрим несколько картин направления (например, фиг.2) или картин отражения (например, фиг.1) в системе сферических/эллипсоидальных спиральных координат. Картина может соответствовать сейсмограмме точек изображения с одним и тем же поперечным положением и различными глубинами. Исходно параметры этих спиралей (например, возвышение, максимальный зенитный угол, площадь сегмента и т.д.) могут быть различными. Поэтому может быть несколько различных спиральных представлений вычисленных данных (например, функции изображения), соответствующих различным глубинам узлов сейсмограммы. Кроме того, может быть спираль визуализации, для которой можно задавать параметры. Максимальный зенитный угол спирали визуализации может быть наибольшим максимальным зенитным углом для всех узлов сейсмограммы на различных глубинах. Чтобы построить общую цилиндрическую картину 300 и/или 400 для всех точек изображения сейсмограммы, вычисленные данные можно регуляризировать или нормализовать до соответствия узлам спирали визуализации. Регуляризация может быть осуществлена для каждого отдельного узла на глубине и может включать в себя, например, два этапа. Сначала может быть выполнен гридинг входных данных в контрольных точках с конкретными угловыми положениями, соответствующими заданной входной или не регуляризированной спирали. Входные спирали могут быть различными для разных глубин. В случае сейсмограммы подсистемы отражения максимальный зенитный угол (например, максимальный угол раскрыва) обычно уменьшается с глубиной. Теоретически, максимальный угол раскрыва может принимать нулевое значение на бесконечной глубине. После гридинга значения функции изображения могут быть определены или прослежены в любой точке сферической или эллипсоидальной поверхности. В одном осуществлении значения функции изображения могут быть «считаны» на узлах спирали визуализации (например, узлах 830 непрерывной криволинейной трехмерной поверхности 835 из фиг.8С). Спираль визуализации может быть одной и той же для всех узлов (например, всех показателей глубины) сейсмограммы. В качестве варианта спираль визуализации может быть образована иной формы или может иметь иную угловую конфигурацию или упорядочение на одном или нескольких различных узлах на глубинах сейсмограммы, например, для согласования с несовместимыми данными.
Способ гридинга можно выполнять независимо для каждой сферической или эллипсоидальной поверхности, например, из фиг.1 и 2 (для каждого узла на глубине). В качестве варианта способ гридинга можно выполнять за один раз, одновременно или в соответствии с одинаковыми параметрами, для всей сейсмограммы или части ее. Последний способ может увеличивать вычислительную сложность гридинга, но может обеспечивать более непрерывное вертикальное распределение функции изображения.
В одном осуществлении набор данных о спирали визуализации для каждого узла сейсмограммы может быть преобразован в непрерывное распределение, образующее сферическую или эллипсоидальную картину. Сферическую или эллипсоидальную картину, образованную для каждого вертикального узла сейсмограммы, можно проецировать, уплощать или растягивать в плоскую круговую, эллиптическую или подобную эллиптической, или иную плоскую двумерную область. В одном осуществлении полярный радиус точки на криволинейной двумерной области может быть равным или пропорциональным зенитному углу на сферической картине. Значения азимута точек на трехмерных сферических и уплощенных двумерных картинах обычно одни и те же.
Следует отметить, что для подсистемы отражения, представляющей величину удаления и азимут удаления, каждый один узел сейсмограммы исходно может быть определен на плоской поверхности, и нет необходимости осуществлять проецирование или растягивание на плоскость.
Из набора плоских картин (например, круговых или плоских криволинейных, некруговых), образованных для узлов сейсмограммы с одним и тем же поперечным положением и различными вертикальными положениями, можно сформировать каждую цилиндрическую картину 300 и/или 400.
В одном осуществлении цилиндрические картины 300 и 400 подсистем направления и отражения могут включать в себя горизонтальные разрезы 320 и 420 и вертикальные разрезы 330 и 430, соответственно. Горизонтальные разрезы 320 и 420 могут быть нормальными к осям 310 и 410, соответственно, и вертикальные разрезы 330 и 430 могут быть параллельными осям 310 и 410, соответственно. Каждый горизонтальный разрез 320 и 420 может быть, например, спроецированным, уплощенным или с приведенной размерностью представлением сферических картин 100 и 200 отражательной способности и направления, соответственно. Горизонтальные разрезы 320 и 420 могут включать в себя области 365 и 465. Области 365 и 465 могут быть, например, спроецированным, уплощенным или с приведенной размерностью представлением отражательной способности в зависимости от компонентных углов отражения и направления областей 165 и 265, соответственно, для точки изображения. Цветная карта, включающая в себя множество цветов, может соответствовать диапазону значений функции изображения. На фиг.3 и 4 различные цвета представлены различным образом заштрихованными областями 365 и 465, соответственно. Цветная карта может быть такой же цветной картой, как используемая в случае сферических картин на фиг.1 и 2 для соответствующей точки изображения сейсмограммы. В качестве варианта можно использовать другую цветную карту. Для индикации значений функции изображения можно использовать другие способы, такие как, например, оттенки серого, яркость, светимость, поперечная штриховка и т.д.
Пользователь может наблюдать картины на графическом пользовательском интерфейсе (например, графическом пользовательском интерфейсе 182а и/или 182b (фиг.7)).
Горизонтальные разрезы 320 и 420 могут соответствовать конкретной точке изображения сейсмограммы (например, с конкретным вертикальным положением). Горизонтальными разрезами 320 и 420 может демонстрироваться функция отражательной способности, например, в диапазоне пространственных направлений или по всем пространственным направлениям.
Вертикальные разрезы 330 и 430 могут включать в себя информацию, относящуюся к сейсмограмме точек, для диапазона зенитных углов и для конкретного или единственного значения азимута.
Цилиндрический радиус 332 (например, меридиональной сейсмограммы), соответствующий амплитуде функции изображения, может изменяться вдоль длины вертикальной оси 310. Например, в вертикальных разрезах 330 цилиндрический радиус 332 может убывать или уменьшаться по мере того, как глубина или координата оси 310 возрастает. Поэтому, в случае ограниченного района полевых работ или ограниченного расстояния между источником и приемником максимально возможный угол раскрыва между падающим и отраженным лучами обычно уменьшается с возрастанием глубины, и при приближении к бесконечной глубине, например, зенитный угол может принимать нулевое значение (или, например, приближаться к пренебрежимо малому или нулевому значению). В случае подсистемы направления максимальный зенитный угол вдоль вертикального разреза 430 также может убывать с глубиной.
Цилиндрический радиус 332, оси 310 и 410, функцию изображения и т.д. можно видеть на цилиндрических картинах 300 и 400, соответственно, или в виде отдельных точек данных или графиков. В другом осуществлении эти данные можно скрывать и открывать по выбору пользователя.
Хотя в этой заявке описываются картины трехмерных тел, имеющих форму цилиндров, специалисты в данной области техники могут понять, что трехмерные тела другой формы можно использовать для одновременного представления данных, связанных с множеством точек изображения. Например, множество сферических поверхностных картин, каждая из которых представляет данные, связанные с единственной точкой, можно собрать с образованием иных конфигураций, а не цилиндров.
В одном осуществлении размер каждой из сферических поверхностных картин можно изменять, например, до другого заданного размера (плавно увеличивая или уменьшая размер). Каждую сферическую поверхность измененного размера можно вложить в соответствии с ее размером, чтобы образовать сплошную сферу. Например, наименьшая сферическая поверхность может быть внутренней поверхностью сплошной сферы, и наибольшая сферическая поверхность может быть внешней поверхностью сплошной сферы. Изменение размера каждой сферической поверхности (например, увеличение или уменьшение) можно считать преобразованием проекций в сферические поверхности различного размера (например, большего и меньшего, соответственно). В одном осуществлении может иметься минимальный размер для наименьшей сферической поверхности, например, такой минимальный размер поверхности, при котором она содержит и отображает (с надлежащим разрешением, пригодным для пользователя) данные, связанные с единственной точкой сейсмического изображения. В этом осуществлении сферическое трехмерное тело или сплошное тело может быть полым, например, не имеющим данных на радиусах, меньших радиуса наименьшей сферической поверхности. В других осуществлениях наименьшая сферическая поверхность может быть точкой, и сферическое тело или сплошное тело не может быть полым. В таких осуществлениях одну или несколько наименьших сферических поверхностей можно использовать в качестве заполнителей. Поскольку наименьшие сферические поверхности обычно являются слишком малыми для визуализации данных, относящихся к ним, с надлежащим разрешением, эти данные можно представлять отдельной картиной (например, в виде полноразмерной сферической поверхности во «всплывающем» окне).
Другие формы для трехмерного тела (например, сплошного) могут включать в себя гиперболоид, эллипсоид и многогранник, которые могут быть собраны, например, из множества вложенных гиперболических поверхностей, эллиптических поверхностей и поверхностей многогранника, соответственно (например, каждой с особым подобранным размером).
Трехмерное тело может определять сплошной объект в трехмерном пространстве координат. Трехмерная поверхность может определять двумерное многообразие, например, в трехмерном пространстве координат. Можно использовать другие построения поверхностей и тел. Сферические картины 100 и 200 из фиг.1 и 2, соответственно, обычно являются трехмерными поверхностями, и цилиндрические картины 300 и 400 из фиг.3 и 4, соответственно, обычно являются двумерными телами.
Пример последовательности действий
Далее обратимся к фиг.5 и 6, на которых представлены блок-схемы последовательностей действий согласно осуществлениям изобретения. Например, на фиг.5 описаны действия при образовании и отображении сферических картин (например, показанных на фиг.1 и 2) и цилиндрических картин (например, показанных на фиг.3 и 4) согласно одному осуществлению. Другие осуществления можно использовать для создания таких картин.
Блок-схемы последовательностей действий описывают пример последовательности действий при обработке данных и визуализации данных, например, с использованием сферических и цилиндрических картин. Специалисты в данной области техники могут понять, что эта последовательность действий является только примером из числа различных других возможных последовательностей действий, и этот пример последовательности действий не ограничивает изобретение.
Обратимся к фиг.5, где при выполнении действия 500 в системе регистрации сейсмических данных (например, системе 100 из фиг.7) могут собираться сейсмические данные. Другие данные, такие как данные для построения медицинских изображений или данные для построения изображений в промышленности, могут быть собраны, обработаны и воспроизведены.
При выполнении действия 510 процессор (например, процессор 140 из фиг.7) может формировать набор дискретных данных (например, набор 815 или 825 дискретных данных из фиг.8А и 8В), представляющий функцию изображения для точки изображения. Набор дискретных данных может включать в себя выборки сейсмических данных, полученные трассированием из зарегистрированных сейсмических данных. Выборки сейсмических данных могут быть, например, дискретными, зависящими от азимута угловыми сейсмограммами и/или сейсмограммами в области удалений для подсистем направления и/или отражения. Можно использовать другие данные или сейсмограммы иных видов.
При выполнении действия 520 процессор может нормализовать (или выполнять гридинг) набора нерегулярных данных (например, набора 815 нерегулярных дискретных данных из фиг.8А), например, путем использования первого преобразования 860. Например, может быть образована вычислительная сетка (например, вычислительная сетка 822), на всем протяжении которой узлы данных (например, узлы 820) или контрольные точки набора дискретных данных могут быть разнесены регулярно или равномерно. Это действие может быть пропущено, если узлы или контрольные точки набора дискретных данных уже расположены регулярно или равномерно.
При выполнении действия 530 процессор может применить к каждому узлу сейсмограммы и к каждой подсистеме (например, подсистемам направления и отражения) способ интерполяции (например, путем использования второго преобразования 865) для получения значений функции изображения между регулярно разнесенными узлами сетки (например, на непрерывной криволинейной трехмерной поверхности 835).
При выполнении действия 540 для выбранных узлов сейсмограммы и для каждой из подсистем процессор может картировать функцию изображения на сферической или иной криволинейной поверхности (например, сферических картинах 100 и 200 из фиг.1 и 2, соответственно). Показываемая цветная карта или другая карта может включать в себя непрерывное распределение функции изображения на протяжении сферической или иной криволинейной поверхности (например, непрерывной криволинейной трехмерной поверхности 835).
При выполнении действия 550 для каждого узла сейсмограммы процессор может (например, путем использования третьего преобразования 870) проецировать, уплощать или растягивать данные изображения, определенные на сферической поверхности или иной криволинейной поверхности, на плоскую поверхность 845 (например, круговую или иную дисковую), например, кругового или некругового плоского диска.
При выполнении действия 560 для каждой из двух подсистем процессор может осуществить сборку плоских дисков, имеющих спроецированные данные изображения (например, путем использования четвертого преобразования 875). Данные, определенные плоскими поверхностями для каждого узла сейсмограммы, могут быть объединены для образования трехмерного тела (например, трехмерного тела 855), такого как круговой или некруговой цилиндр.
При выполнении действия 570 процессор может осуществить отображение трехмерного тела (например, цилиндрических картин 300 и 400 из фиг.3 и 4, соответственно).
При выполнении действия 580 процессор может формировать осевые разрезы (например, 330 и 430 (фиг.3 и 4), соответственно) трехмерного тела (например, цилиндрических картин 300 и 400, соответственно) для азимутов, произвольно выбираемых пользователем. Каждый осевой разрез может представлять одноазимутальную сейсмограмму изображения, включающую в себя многочисленные зенитные углы (или, например, величины удалений) в пределах заданного диапазона и многочисленные узлы сейсмограммы по глубине.
Можно использовать другие операции или последовательности операций.
Обратимся к фиг.6, где при выполнении действия 600 первый дисплей (например, дисплей 180а (фиг.7)) может показывать стандартную картину точек изображения (например, сейсмических данных) в качестве визуализации геофизического района. Первая картина может быть визуализацией функции изображения в зависимости от местоположения. Например, каждая точка может быть определена тремя составляющими, такими как декартовы составляющие точки и цвет, соответствующий значению функции в каждой точке. Хотя описаны конкретные картины (например, фиг.1-4) и структуры данных, в осуществлениях изобретения могут использоваться другие картины и структуры данных.
При выполнении действия 610 устройство ввода может получать точку, выбираемую или указываемую пользователем. Пользователь может указать (например, щелчком кнопки мыши или подсвечиванием) физическое местоположение одной точки изображения или множества точек изображения (например, определенных для расположения вдоль линии в физическом пространстве, например, вертикальной линии) стандартной картины, подлежащей отображению в виде сферы или цилиндра. Точки могут быть «определены» для расположения вместо «фактически» расположенных, поскольку точность геофизических имитационных моделей обычно меньше полной (100%-ой) точности. В ответ на такое указание дисплей может осуществить отображение для пользователя (например, на графическом пользовательском интерфейсе) представления указанных данных.
При выполнении действия 620 в ответ на прием от пользователя указаний относительно одной или нескольких точек сейсмического изображения второй дисплей (например, дисплей 180b, фиг.7) может осуществить отображение (например, на графическом пользовательском интерфейсе 182b) одной или множества (например, сейсмограмму) точек изображения из одной или нескольких составляющих данных в дополнение к данным, отображенным при выполнении действия 600 (например, на графическом пользовательском интерфейсе 182а). Вторая картина может быть визуализацией функции изображения в зависимости от дополнительной составляющей, такой как ориентация на сферической картине или положение (например, по вертикали) и ориентация на цилиндрической картине. При отображении данных для одной точки изображения картина может включать в себя сферические картины 100 и/или 200 из фиг.1 и 2. При отображении данных для множества точек изображения или сейсмограммы сейсмического изображения (например, соответствующей линии или кривой в физическом пространстве) картина может включать в себя цилиндрические картины 300 или 400 из фиг.3 и 4. Дополнительные картины компонентных данных (например, на графическом пользовательском интерфейсе 182b) можно отображать стандартной картиной или рядом со стандартной картиной, или визуализацией геофизического района (например, на графическом пользовательском интерфейсе 182а). Хотя показаны два дисплея или монитора, это сделано только для примера, и можно использовать только один монитор или большее количество, чем два монитора, и кроме того, одновременно требуется отображать данные только одного вида. Например, нет необходимости отображать «стандартную» трехмерную картину, а достаточно отображать конкретные составляющие.
В одном осуществлении цилиндрическая картина (например, 300 и/или 400 (фиг.3 и 4)) может наблюдаться как частично полая структура. В качестве варианта картина может быть (например, первоначально) сплошной и под управлением или воздействием пользователя может становиться прозрачной для показа данных, не видных на наружной поверхности сплошной структуры. Например, в данный момент времени можно осуществлять отображение только одного плоского диска. Другие диски могут быть скрыты с тем, чтобы они не мешали обзору единственного показываемого диска. В других осуществлениях можно одновременно отображать два или большее количество дисков. Например, пользователь может указать точку (например, на всем протяжении линии 880) на цилиндре, и в ответ на указание на картине может показываться диск, имеющий эту точку. Могут показываться данные, соответствующие скрытым дискам, например, максимальный цилиндрический радиус 332 (например, меридиональная сейсмограмма), соответствующий максимальному зенитному углу функции изображения диска, изменяющийся вдоль длины вертикальной оси 310. Цилиндрический радиус 332 меридиональной сейсмограммы может быть простым признаком функции изображения дисков, которые не показываются. Например, пользователь может сравнивать детализированную функцию изображения единственного показываемого диска с упрощенным представлением функции изображения (например, максимальным цилиндрическим радиусом 332, представляющим максимальный зенитный угол меридиональной сейсмограммы) скрытых дисков, например, для идентификации тенденций или сравнения функции изображения или значений составляющих среди дисков.
Другие участки картин могут скрываться или открываться, а скрытые или открытые структуры могут заменяться, например, под контролем, по меньшей мере, частичным, пользователя, обслуживающего устройство ввода. Например, при отображении цилиндрической картины (например, 300 и/или 400 из фиг.3 и 4) пользователь может потребовать (например, щелчком правой кнопкой мыши или выбором соответствующей пиктограммы) скрыть или открыть оси 310 и/или 340, расположенные на плоскости узлы 840 (например, наложенные на соответствующие плоские диски) и/или расположенные на цилиндре узлы 850 (например, наложенные на соответствующие цилиндрические картины). Например, при отображении сферической картины (например, 100 и/или 200 из фиг.1 и 2) пользователь может потребовать скрыть или открыть вычислительную сетку 822 или выходную сетку из, например, расположенных по спирали узлов 830 и т.д. Пользователь может затребовать дополнительную информацию для выявления физического пространства (например, цветом, подсветкой, стрелочным указателем и т.д.), в котором определяют выбранную одну или несколько точек изображения, чтобы найти местоположение (например, при первом отображении на этапе действия 600). Могут быть показаны дополнительные данные, например, количество итераций, использованных для образования вычислительной сетки 822, или выполнена визуализация этапов рекурсивного построения (например, от первой стадии развития многогранника, имеющего относительно небольшое количество граней, до последней стадии развития многогранника, имеющего относительно большое количество граней и близко приближающегося к сфере в пределах заданного порога ошибки перед следующей итерацией). Другие данные, такие как максимальный цилиндрический радиус 332 линии точек, такой как меридиональная сейсмограмма, цветные карты, оси 310 и 410, местоположения точек изображения на цилиндрической картине и/или в физическом пространстве, значения функции изображения и т.д., могут наблюдаться на картине или в виде отдельных точек данных или графиков. В соответствии с выбором пользователя эти данные могут быть скрытыми или открытыми.
В одном осуществлении на цилиндрической картине (например, 300 и/или 400 из фиг.3 и 4) можно отображать составляющие данных изображения, соответствующие двум подсистемам (например, угла отражения или удаления и направления). Цилиндрическая картина может включать в себя многочисленные плоские, уложенные стопкой диски, при этом каждый является уплощенным из сферической картины (например, 100 и/или 200 из фиг.1 и 2), каждая сферическая картина представляет функцию изображения для отличающейся точки сейсмограммы изображения. Поэтому цилиндрическая картина может соответствовать сейсмограмме изображения. Можно использовать иные картины, а не цилиндрическую картину, такие как конусы, пирамиды, воронки, конические или цилиндрические участки или сечения и т.д.
Пользователь может, например, анализировать пару картин отражения и направления (или, например, удалений), соответствующих одной и той же точке. Пара картин, включающих в себя картину направления, имеющую единственное значение или узкий диапазон значений, и картину угла отражения (или, например, удалений), имеющую множество или широкий диапазон значений точки изображения, может указывать на то, что точка изображения лежит на линии разрыва.
Соответственно, действия от 610 по 620 могут быть повторены, например, когда пользователь укажет другие точки изображения (например, сканируя точки изображения) для наблюдения соответствующих пар картин направления и угла отражения (или, например, удалений), чтобы обнаружить местоположения точек изображения, которые попадают на линии разрывов.
Можно реализовать другие выгоды.
Можно использовать другие действия или последовательности действий.
Пример системы
На фиг.7 схематично показана система, включающая в себя излучатель, приемник и вычислительную систему, согласно осуществлению настоящего изобретения. Систему 100 можно использовать, например, для отображения данных изображения, таких как, например, сейсмические данные, на сферических картинах (например, из фиг.1 и 2), и/или цилиндрических картинах (например, из фиг.3 и 4), и/или картинах стандартного или физического пространства. В осуществлениях настоящего изобретения можно использовать иные данные, а не сейсмические данные. Системой 100 могут выполняться осуществления любых способов, рассмотренных в этой заявке, и/или другие операции или вычисления. В системе 100 можно, например, осуществлять отображение стандартной картины или визуализацию физического пространства (например, геофизического пространства, медицинского изображения), и в дополнение к этому или в качестве варианта картин для пользователя, такие как, но без ограничения ими, сферические или цилиндрические картины, на которых могут показываться детали или дополнительные компонентные данные, которые можно использовать для построения стандартного визуального представления.
Система 100 может включать в себя, например, излучатель 110, приемник 120, вычислительную систему 130 и один или несколько дисплеев 180а и 180b. В системе, имеющей более одного монитора или дисплея, стандартную картину или визуализацию физического пространства можно отображать на одном дисплее (например, дисплее 180а), а сферические или цилиндрические картины, воспроизводящие детали или дополнительные компонентные данные, можно отображать на втором дисплее (например, дисплее 180b). Однако, один дисплей можно использовать для отображения информации одного или нескольких видов (например, стандартной картины и/или картины, включающей в себя дополнительные компонентные данные). С излучателя 110 могут выводиться любые подходящие сигналы, или он может формировать падающую волну (волны). Например, последовательность лучей акустической или сейсмической энергии или волн может излучаться от каждого из многочисленных мест. Приемник 120 может принимать отраженный сигнал (сигналы), который соответствует падающим волнам или связан с этими волнами, посылаемыми излучателем 110. В случае построения изображения в других областях, например, при построении медицинских изображений излучатель 110 может отдавать такую энергию, как ультразвуковая, магнитная, рентгеновская, или другую подходящую энергию.
Вычислительная система 130 может включать в себя, например, процессор 140, запоминающее устройство (ЗУ) 150 и программное обеспечение (ПО) 160. Процессор 140 может обрабатывать данные, например, исходные данные, принимаемые с приемника 120. В запоминающем устройстве 150 могут сохраняться данные, например, исходные или обработанные сейсмические данные. Действия, выполняемые согласно осуществлениям изобретения, такие как, например, преобразование, проецирование, интерполяция, гридинг, формирование вычислительной сетки, оценка, аппроксимирование, отображение и т.д., могут по меньшей мере частично выполняться, находиться под управлением или вычисляться, например, оператором (например, реализуемым программным обеспечением 160). Другие блоки или процессоры могут выполнять такие действия или другие действия согласно осуществлениям настоящего изобретения.
Дисплеи 180а и/или 180b (например, такие как мониторы или экраны) могут осуществлять отображение для пользователя или наблюдателя сферических или цилиндрических картин, представляющих данные от излучателя 110, приемника 120, вычислительной системы 130 или любых других подходящих систем, устройств или программ, например, программ или программного обеспечения построения изображения, или устройства отслеживания излучателя или приемника. Дисплеи 180а и/или 180b могут включать в себя один или несколько входов для отображения данных от многочисленных источников данных. Система может включать в себя большое количество дисплеев. Дисплеи 180а и/или 180b могут осуществлять отображение изображений, формируемых на основании данных. Например, дисплеи 180а и/или 180b могут осуществлять отображение представлений или визуализаций сейсмических или других данных, предназначенных для построения изображения, например, зависящих от угла сейсмограмм общей точки изображения, процессов согласно осуществлениям, описанным в этой заявке.
Дисплеи 180а и 180b могут включать в себя, например, один или несколько графических пользовательских интерфейсов 182а и 182b соответственно. В ответ на указание пользователем, обслуживающим устройство 170 ввода, одной или нескольких точек сейсмического изображения или линии физического пространства дисплеи могут показывать графические пользовательские интерфейсы 182а и/или 182b. Дисплей может, например, отображать данные о направлении, данные для множества направлений и/или функцию изображения в зависимости от направления, соответствующую указанной точке сейсмического изображения. Графические пользовательские интерфейсы 182а и/или 182b могут предоставлять пользователю возможность наблюдения результатов на их входах (например, связанных с работой устройства 170 ввода) или результатов взаимодействия с дисплеями для выбора точек, запроса дополнительных данных, задания графических параметров, выбора графических структур для скрытия и открытия и т.д.
Вычислительная система 130 может включать в себя, например, одно или несколько устройств 170 ввода (например, таких как клавиатура и/или мышь) для приема команды, выделенных фрагментов или сигналов (например, от пользователя или другого внешнего устройства).
Вычислительная система 130 может включать в себя, например, любую подходящую систему обработки, вычислительную систему, вычислительное устройство, устройство обработки, компьютер, процессор и т.п. и может быть реализована с использованием любой комбинации аппаратного обеспечения и/или программного обеспечения.
Процессор 140 может включать в себя, например, один или несколько процессоров, контроллеров или центральных процессоров (ЦП). Программное обеспечение 160 может храниться, например, все или частично, в запоминающем устройстве 150. Программное обеспечение 160 может включать любое подходящее программное обеспечение, например, для обработки или построения изображения согласно осуществлениям настоящего изобретения. Процессор 140 может работать, по меньшей мере, частично, на основании команд в программном обеспечении 160. Осуществления изобретения могут включать в себя машиночитаемый носитель данных, такой как, например, запоминающее устройство, дисковый накопитель или «диск на ключе» (портативная карта памяти с разъемом USB), включающий в себя команды, при выполнении которых процессором или контроллером осуществляются способы, раскрытые в этой заявке, или процессор побуждается осуществлять такие способы. Программное обеспечение 160 может храниться на машиночитаемом носителе данных.
Система 100 может осуществлять отображение, например, изображений поверхностей объектов исследований, например, при использовании программного обеспечения 160 и/или процессора 140, или других компонентов, таких как специализированные процессоры для обработки изображений или сигналов. Такие картины можно использовать и анализировать, например, для определения местоположений точек изображений, которые лежат на разрывах или других геологических неоднородностях, или точек, представляющих интерес.
Система 100 может, например, осуществлять отображение точки данных сейсмического изображения. Пространственные характеристики точки сейсмических данных (например, зенитный и азимутальный углы, относительное положение и/или другие пространственные координаты в пределах более крупной подземной области) могут быть представлены на стандартной картине в обычной системе координат (например, декартовых или полярных).
Процессор 140 может, например, на основании набора широкоазимутальных данных вычислять набор дискретных данных (например, 815 или 825 (фиг.8А и 8В), соответственно), связанных с функцией изображения в точке сейсмического изображения в пространственной системе координат. Процессор 140 может преобразовывать (например, путем интерполяции или гридинга) набор дискретных данных в непрерывную криволинейную трехмерную поверхность (например, 835 из фиг.8С).
Процессор 140 может формировать вычислительную сетку (например, в соответствии с действием 520 из фиг.5). Вычислительная сетка (например, вычислительная сетка 822 из фиг.8В) может включать в себя регулярно разнесенные узлы (например, узлы 820). Процессор 140 может осуществлять гридинг (или, например, интерполяцию) входных данных на вычислительную сетку (например, в соответствии с действием 530 (фиг.5)). Например, процессор 140 может преобразовывать набор дискретных данных в непрерывную криволинейную трехмерную поверхность, например, путем оценивания значений функции изображения на узлах вычислительной сетки и в точках между регулярно разнесенными узлами вычислительной сетки. Процессор 140 может формировать вычислительную сетку, начиная с первичного многогранника, вписанного в сферу, и затем, как описано в предшествующих разделах, разбиения его сферических треугольников рекурсивным способом.
Можно использовать другие зависимости или преобразования между пространственными координатами и непрерывной криволинейной трехмерной поверхностью.
Дисплеи 180а и/или 180b могут осуществлять отображение непрерывной криволинейной трехмерной поверхности в виде сферы, эллипсоида, сферической шапки и эллипсоидальной шапки или иной криволинейной трехмерной поверхности (например, такой как сферические картины 100 и/или 200 из фиг.1 и 2 соответственно).
Процессор 140 может, например, проецировать набор преобразованных данных на непрерывную криволинейную двумерную поверхность (например, плоский диск). Дисплеи 180а и/или 180b могут осуществлять отображение спроецированных данных в виде плоского диска. Внешняя граница плоского диска может быть, например, замкнутой кривой, включая окружность, овал или другую замкнутую кривую, или иной двумерной поверхностью (например, такой как картины плоской поверхности 845 из фиг.8D). Радиусы точек на плоском диске могут, например, соответствовать зенитным углам из набора дискретных данных или величинам удалений из набора дискретных данных.
Процессор 140 может, например, собирать множество непрерывных плоских поверхностей в трехмерное тело (например, 855 из фиг.8Е). Дисплеи 180а и/или 180b могут осуществлять отображение трехмерного тела в виде цилиндра, конуса, усеченного конуса или иного криволинейного трехмерного тела (например, такого как цилиндрические картины 300 и/или 400 (фиг.3 и 4) соответственно).
Аргументы функции изображения, представленной на непрерывной криволинейной трехмерной поверхности, могут включать в себя, например, углы направления, углы отражения, удаления (например, определяемые величинами удалений и азимутами) из, например, широкоазимутальных данных, собираемых во время геофизической разведки, и/или другие, или дополнительные составляющие, обычно не показываемые на стандартной картине. Хотя эти дополнительные составляющие могут быть объединены или обработаны для получения пространственных характеристик точки изображения, обычно каждая из дополнительных составляющих не показывает местоположения точки изображения в геофизическом пространстве.
Система 100 может, например, осуществлять отображение сейсмограммы сейсмического изображения. На основании набора широкоазимутальных данных процессор 140 может формировать множество наборов дискретных данных (например, 815 или 825 (фиг.8А и 8В) соответственно). Каждый набор дискретных данных может быть связан с функцией изображения одной или множества точек данных сейсмического изображения, определенных для расположения вдоль линии в физическом пространстве. Каждая из множества точек данных сейсмического изображения, определенных для расположения вдоль линии в физическом пространстве, может соответствовать сейсмограмме сейсмического изображения, представляющей множество зенитных углов и единственный азимутальный угол.
Процессор 140 может осуществлять гридинг каждого из наборов дискретных данных на непрерывную криволинейную трехмерную поверхность. Процессор 140 может проецировать каждый из наборов прошедших гридинг данных на непрерывную криволинейную двумерную поверхность. Процессор 140 может осуществлять сборку множества непрерывных криволинейных двумерных поверхностей в трехмерное тело. Процессор 140 может осуществлять сборку множества непрерывных криволинейных двумерных поверхностей в трехмерное тело вдоль оси (например, линии 880 (фиг.8Е)) симметрии тела.
Дисплеи 180а и/или 180b могут осуществлять отображение трехмерного тела. Трехмерное тело предназначено для одновременного представления данных, связанных с линией точек. Трехмерное тело может быть, например, цилиндром (например, таким как цилиндрические картины 300 и/или 400 (фиг.3 и 4) соответственно), конусом, воронкой или пирамидой.
Устройство ввода (например, устройство 170 ввода (фиг.7)) может принимать указания от пользователя относительно точки или линии сейсмического изображения (например, относительно точек сейсмического изображения) в физическом пространстве. Дисплей в ответ на указание относительно точки сейсмического изображения от пользователя, обслуживающего устройство ввода, может осуществить отображение графического пользовательского интерфейса (например, графического пользовательского интерфейса 182b (фиг.7)), содержащего спроецированные данные, полученные на основании набора дискретных данных, соответствующего указанной точке сейсмического изображения. Дисплей в ответ на указание относительно линии от пользователя, обслуживающего устройство ввода, может осуществлять отображение графического пользовательского интерфейса (например, графического пользовательского интерфейса 182b), включающего в себя трехмерное тело, полученное на основании набора дискретных данных, связанного с множеством точек данных сейсмического изображения, определенных для расположения вдоль указанной линии.
Одно осуществление изобретения может включать в себя отображение широкоазимутальных данных сейсмического изображения, преобразованных из первой системы координат в систему координат с приведенной размерностью для снижения размерности набора данных. Системой координат с приведенной размерностью может быть, например, описанная в заявке US № 11/798996. Картина может включать в себя спиральную геометрию. Согласно одному осуществлению данные с приведенной размерностью можно отображать на сферических поверхностях в случае подсистем угла отражения (фиг.1) и направления (фиг.2) локальной угловой области. Эти картины можно проецировать и собирать для образования цилиндрических картин с приведенной размерностью в пространстве координат с приведенной размерностью.
Приведенное выше описание осуществлений изобретения было представлено для иллюстрации и пояснения. Оно не предполагается исчерпывающим или ограничивающим изобретение точными раскрытыми осуществлениями. Специалистам в данной области техники должно быть понятно, что в свете изложенной выше идеи являются возможными многочисленные модификации, варианты, замены, изменения и эквиваленты. Должно быть понятно, что прилагаемая формула изобретения охватывает все такие модификации и изменения, как попадающие в рамки истинной сущности изобретения.
Реферат
Группа изобретений относится к области разведки и добычи нефти и газа, построения модельного изображения на небольшой глубине для экологических исследований (например, с использованием данных, собранных сейсмическим методом и/или радиолокационной станцией, обнаруживающей объекты под землей). Заявленная группа изобретений включает устройство, систему и способ для сейсмического исследования подземной структуры посредством отображения данных сейсмического изображения, которые включают в себя вычисление, на основании набора широкоазимутальных данных, набора дискретных данных, связанного с функцией изображения в точке сейсмического изображения. Набор дискретных данных может быть преобразован в непрерывную криволинейную трехмерную поверхность. Отображенный набор данных может быть спроецирован на непрерывную плоскую поверхность. Спроецированные данные могут отображаться в виде плоского диска. Множество непрерывных плоских поверхностей, каждая из которых представляет единственную точку изображения, может быть собрано для образования трехмерного тела, представляющего сейсмограмму точек изображения. Может быть осуществлено отображение трехмерного тела. Технический результат заключается в повышении точности геофизического обнаружения при проведении разведки и добычи нефти и газа. 3 н. и 22 з.п. ф-лы, 15 ил.
Формула
вычисляют на основании набора широкоазимутальных данных набор дискретных данных, включающий в себя множество азимутов, причем набор дискретных данных связан с функцией изображения в точке сейсмического изображения;
преобразуют набор дискретных данных в непрерывную криволинейную трехмерную поверхность;
проецируют преобразованный набор данных на непрерывную плоскую поверхность; и
отображают проекцию в виде плоского диска.
формируют на основании набора широкоазимутальных данных множество наборов дискретных данных, включающих в себя множество азимутов, причем набор дискретных данных связан с функцией изображения одной из множества точек данных сейсмического изображения, определенных для расположения вдоль линии в физическом пространстве;
осуществляют гридинг каждого из наборов дискретных данных на непрерывную криволинейную трехмерную поверхность;
проецируют каждый из прошедших гридинг наборов данных на непрерывную плоскую поверхность;
собирают множество непрерывных плоских поверхностей в трехмерное тело; и
отображают трехмерное тело для одновременного представления данных, связанных с линией точек.
процессор для вычисления на основании набора широкоазимутальных данных набора дискретных данных, причем набор дискретных данных, включающих в себя множество азимутов, связан с функцией изображения в точке сейсмического изображения, для преобразования набора дискретных данных в непрерывную криволинейную трехмерную поверхность и для проецирования преобразованного набора данных на непрерывную плоскую поверхность; и
дисплей для отображения спроецированного набора данных в виде плоского диска.
Комментарии