Эргометрический тренажер - RU2472557C2
Код документа: RU2472557C2
Чертежи










Описание
Изобретение относится к эргометрической стационарной части тренажерного устройства с ручным (при помощи рук или ног) приводом с двумя приводными элементами, которые приводят в действие поочередно, причем привод соединен с маховиком зубчатой передачей, а также с измерительным блоком для измерения приводного усилия, прилагаемого к приводу, или скручивающего усилия (вращающего момента), относящегося к приводному усилию, и измерительному прибору для измерения положения в движении, в частности углового положения привода. Приводные элементы, предпочтительно, представляют собой педали, подобные используемым на велосипеде, но могут также быть элементами другого типа, такими как, например, шаговые платформы так называемого лестничного типа.
Часть тренажерного устройства этого вида описана в патенте US 5027303. Момент измеряется при помощи тензодатчиков сопротивления, которые прикреплены к нагруженным узлам педальной конфигурации, для измерения таких параметров, как момент, работа, мощность, угловая скорость и время одного оборота. Таким образом, осуществляется измерение полного момента, а также моментов на левой и правой педалях (для левой и правой ног, соответственно); и на его основе может быть вычислена выполненная работа и мощность.
Патент EP 0925096 В1 описывает электронную тренажерную систему с монитором физической активности, который имеет датчик и индикаторное устройство, которые записывают и отображают физические данные в течение первого периода. Тренажерное устройство имеет генератор сопротивления, например тормоз на вихревых токах, и средство управления, которое использует отображаемые данные о физической активности для управления работой тренажерного устройства.
Патент US 5354251 описывает тренажерный станок, в котором сиденье и нагруженная пружиной вращающаяся ось прикреплены в удлиненной раме. Вращающаяся ось соединена с маховиком и имеет устройства сопротивления. В качестве устройств сопротивления описаны, например, центробежный тормоз, колесо ветряного типа, сквозной маховик, а также колесо торможения на вихревых токах, в которое встроено колесо ветряного типа.
Другие тренажерные устройства описаны в патентах US 2002/0004439 А1, US 2007/0117680 А1, US 5611759 и US 5749807.
Измерение момента на цепи велосипеда описано в патенте JP 05201374 A. В верхней секции цепи расположен детектор натяжения для измерения упругости, а именно зубчатое колесо, которое входит в зацепление с цепью с внешней стороны, и тензодатчик сопротивления, который измеряет силу, прилагаемую к зубчатому колесу цепью.
Патент DE 19919154 А1 описывает способ и устройство для приложения предварительного усилия к бесконечному приводному элементу, такому как цепь. Прижимная планка прижимается при помощи устройства натяжения цепи к цепи с внешней стороны с заданной силой. Создаваемая таким образом сила предварительного натяжения цепи задается электронным средством управления в зависимости от данных датчика относительно данных колебаний или других стандартных параметров.
Патент US 4141245 описывает устройство для измерения механической работы и мощности, которая передается элементу привода между двумя ведущими колесами. Элемент для измерения силы с роликом прижимается силой пружины к элементу привода, и степень смещения служит для измерения передаваемой силы натяжения. Различные варианты осуществления изобретения включают ролик, входящий в контакт на внутренней или внешней стороне, или комбинацию, по меньшей мере, одного ролика на внутренней стороне и одного на внешней стороне.
Другое измерительное оборудование для измерения приводного момента в системе привода, например, велосипеда, представлены в патенте US 4909086 и патенте US 2007/0099735 А1.
Патент DE 4227586 А1 описывает педальный тренажер с отдельным измерением силы для двух педальных рычагов, а именно, при помощи тензодатчика сопротивления на каждом педальном рычаге и с датчиком угла, благодаря которому стала возможной оценка траектории движения, например, в форме полярной диаграммы. Патент DE 4435174 А1 дополнительно предлагает диагональное расположение тензодатчика сопротивления на рассматриваемом педальном рычаге.
Другие предложения для измерения силы при движении педалей описаны в патенте US 2007/0149364 А1, US 5573481, WO 02/47551 A2 и EP 1362552 А1.
Эти известные тренажерные и измерительные устройства предназначены для измерения силы или вращающего момента, прилагаемых тренирующимся человеком различными способами, которые, однако, часто являются трудоемкими и сложными. Известные способы являются, в частности, трудоемкими, если желательно дифференцированное представление о различных частях процесса, а именно подразделение между двумя ногами (или двумя руками с устройством с ручным управлением).
Целью настоящего изобретения является получение тренажерных устройств, в которых измерение приложенной силы или скручивающего усилия распределено на движения, происходящие слева/справа.
Эта цель достигнута на основе тренажерного устройства указанного выше типа, в котором измерительное устройство для измерения положения в движении, согласно изобретению, имеет пару сенсорных устройств, которые находятся в положениях друг против друга относительно колеса, которое соединено с приводом таким образом, что оно движется синхронно с ним, причем в положениях, каждое из которых соответствует положению в движении при чередовании нагрузки между двумя приводными элементами.
Это решение позволяет простым способом обнаруживать изменение нагрузки между левой и правой конечностями и, таким образом, различие между силами, прилагаемыми ими, или работой, генерируемой ими, в зависимости от обстоятельств. Кроме того, это позволяет упростить процедуру измерения, а также обеспечивает достоверную оценку данных, зарегистрированных относительно силы, как функции положения ноги, или скорее угла поворота. Колесо, например зубчатое колесо, прикреплено к оси педали с возможностью вращения с фиксацией, или оно может быть соединено с осью педали через зубчатую передачу, если преобразование позволяет иметь адекватное заключение о расположении под углом колеса относительно положения при движении привода.
В предпочтительном варианте осуществления изобретения, который раскрывает особенно эффективное выполнение подхода, лежащего в основе изобретения, два сенсорных устройства выполнены как сенсорные компоненты, прикрепленные к колесу в положениях, находящихся противоположно друг другу; кроме того, по меньшей мере, одно сенсорное устройство находится в зафиксированном положении, что позволяет обнаруживать прохождение сенсорного компонента через определенное угловое положение колеса, причем угловое положение соответствует положению в движении при чередовании нагрузки между двумя приводными элементами.
Однако также пригоден вариант, в котором два сенсорных устройства применены как датчики, и применен, по меньшей мере, один дополнительный сенсорный компонент, прикрепленный к колесу, при этом, благодаря датчикам, прохождение по меньшей мере, одним сенсорным компонентом колеса определенных угловых положений, расположенных друг против друга, может быть обнаружено, при этом каждое угловое положение соответствует положению в движении с чередованием нагрузки между двумя приводными элементами.
Для эффективного бесконтактного обнаружения подвижных частей предпочтительно, чтобы сенсорные компоненты представляли собой магниты, в частности постоянные магниты, и датчики представляли собой датчики магнитного поля.
Для достижения дополнительного упрощения измерительного прибора, используемого для измерения прилагаемого усилия, предпочтительно, чтобы измерительный блок для измерения приводного усилия представлял собой рычаг, соединенный с тяговым механизмом, в частности с цепью зубчатой передачи, который немного нажимает на сторону тягового механизма и имеет измерительный датчик для измерения тягового усилия, таким образом, прилагаемого тяговым механизмом.
Предпочтительно, может применяться система оценки для приема сигналов от измерительного блока относительно прилагаемого приводного усилия или относящегося к нему прилагаемого скручивающего усилия и для вычисления развития во времени приводного усилия или скручивающего усилия, а также переменных, выводимых из величин на основе сигналов, выданных измерительным устройством, и непрерывного их отображения. Устройство оценки, кроме того, может принимать от измерительного прибора сигналы относительно моментов времени изменения нагрузки и распределять вычисленные переменные поочередно для правой или левой конечностей тренирующегося человека в зависимости от чередования нагрузки, представляемого измерительным оборудованием. Выходные данные относительно переменных, вычисленных таким образом, могут, в этом случае, распределяться относительно правой и левой конечностей на основе сигнала измерительного прибора относительно моментов времени изменения нагрузки. Несложное определение и автоматизированный вывод данных относительно усилия при тренировке, распределенных для левой/правой сторон, достигаются благодаря этому дальнейшему усовершенствованию.
Кроме того, желательно, чтобы зависимое от скорости сопротивление, которое тренирующийся человек должен преодолевать на тренажерном устройстве, соответствующем изобретению, было насколько возможно приближено к естественному, то есть соответствовало сопротивлению дорожного велосипеда. С этой целью, предпочтительно, чтобы маховик имел устройство, которое затормаживается сопротивлением воздуха и соединено с электромагнитным тормозом. Устройство, затормаживаемое сопротивлением воздуха, может быть лопастным колесом, соединенным с маховиком с возможностью вращения с блокировкой. Кроме того, лопастное колесо может иметь множество лопастей, выровненных параллельно оси вращения.
Для получения возможности дополнительного задания эффекта сопротивления воздуха, согласно потребности, предпочтительно, чтобы устройство, затормаживаемое сопротивлением воздуха, располагалось в кожухе, который имеет средство для задания величины воздушного потока, вызываемого движением маховика. Например, кожух может иметь отверстия, размер и воздухопроницаемость которых могут быть заданы, и посредством которых может быть задан воздушный поток, проходящий через кожух.
Далее изобретение будет описано более подробно на основе не ограничивающего примерного варианта его осуществления, который показан на прилагаемых чертежах. На чертежах:
фиг.1 - вид в перспективе (спереди справа) тренажерного устройства согласно примерному варианту осуществления изобретения;
фиг.2 и 3 - тренажер в другом виде под углом и в виде сбоку слева;
фиг.4 - вид зубчатой передачи тренажерного устройства более подробно (вид сбоку справа без кожуха);
фиг.5 - вид детали, изображенной на фиг.4, показывающей измерение силы на цепи зубчатой передачи;
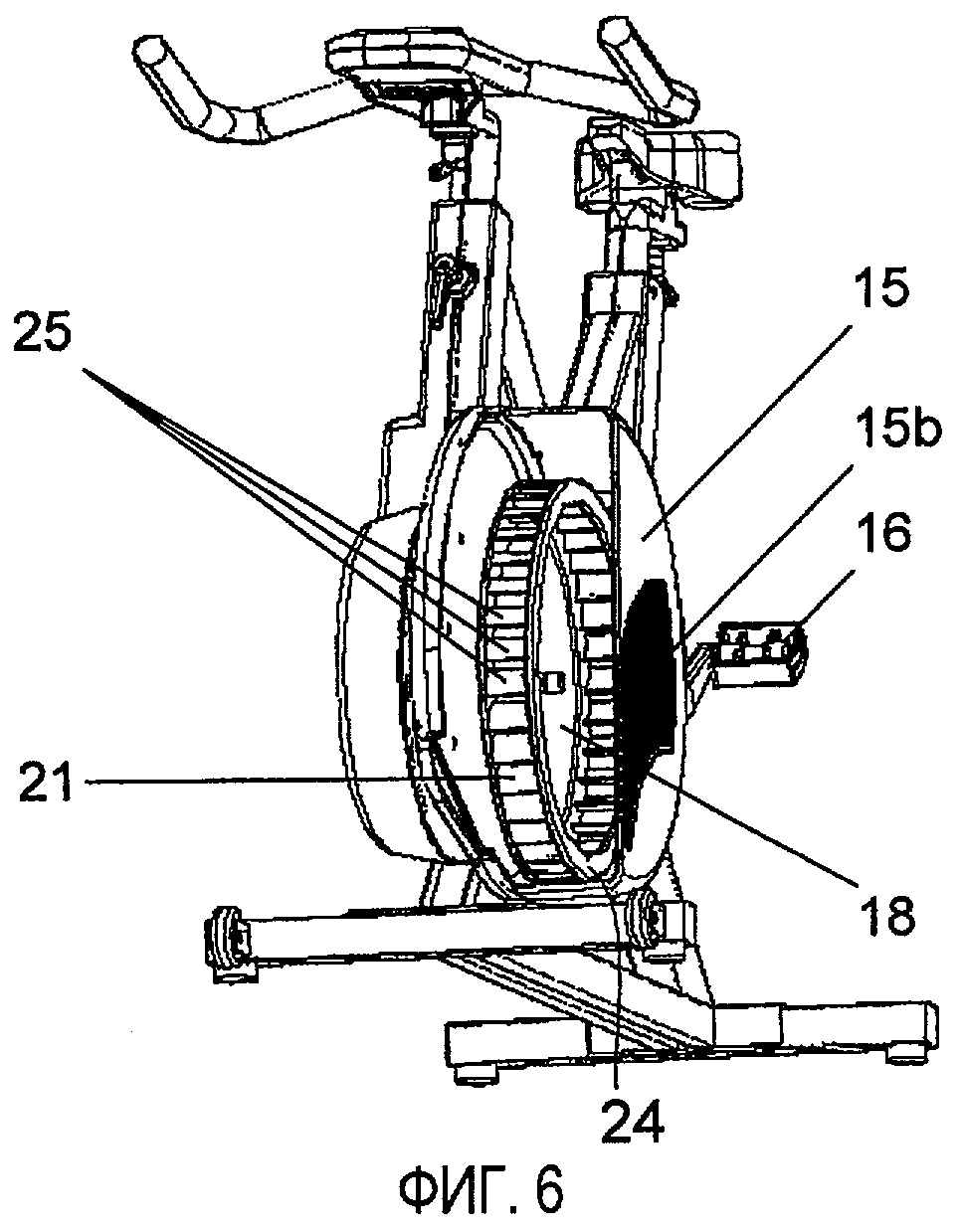
фиг.6 - вид сечения колесного барабана тренажерного устройства;
фиг.7 - вид тренажерного устройства с разомкнутым магнитным тормозом;
фиг.8 и 9 - детальные виды с левой стороны района расположения педалей с частично снятым кожухом таким образом, чтобы датчики для измерения положения педали были видны, при этом показанные на фиг.7 опорная штанга и осевая втулка опущены;
фиг.10 - блок-схема оценки сигнала и данных;
фиг.11 - вид руля тренажерного устройства с дисплеем, и
фиг.12 - пример отображения приводного усилия в зависимости от угла поворота (в полярной форме).
Примерный вариант осуществления изобретения, описанный далее, относится к стационарному эргометрическому велотренажеру, который показан на фиг.1-3 в различных видах. Тренажер 10 может использоваться, например, как домашний тренажер, как тренажер в тренировочном зале или может использоваться в элитном спорте или также в медицинской области.
Тренажер 10 имеет раму 11 велосипедного типа с сиденьем 12 и рулем 13, положения которых могут регулироваться, в то время как сам тренажер в ходе тренировочного цикла неподвижен. В районе расположения ног находится кожух 14, который в районе его передней части имеет защитное ограждение 15 колеса, а также пару педалей 16. Педали 16 прикреплены к оси 17 педалей известным образом и связаны через зубчатую передачу с механизмами сопротивления, которые расположены в защитном ограждении 15 колеса, как описано ниже.
Как показано на фиг.4, зубчатая передача 40 в показанном примерном варианте осуществления изобретения представляет собой комбинацию двух тяговых приводов, а именно зубчатой передачи и ременного привода, при помощи которых достигается высокая передача движения педали 16 маховику 18. Педали 16 жестко соединены через ось 17 педалей с зубчатым колесом 19, которое приводит ведущее зубчатое колесо 42 при помощи цепи 41. Ведущее зубчатое колесо 42, в свою очередь, соединено с дисковым колесом 43, которое приводит маховик 18 при помощи ремня 45, натянутого при помощи вспомогательного колеса 44.
Показанный вариант осуществления изобретения имеет измерительную систему с точностью измерения 2% или выше. Она служит для измерения усилия, прилагаемого пользователем, и скорости вращения педалей и соединена с вычислительной системой для отображения и оценки измеренных данных.
Измерение усилия
Как показано на фиг.5, измерительный блок 50, предпочтительно, расположен в первом тяговом приводе для измерения усилия, которое тренирующийся человек прилагает через педальный привод к цепи 41. Когда длина педали постоянна и известна, приводное усилие может быть вычислено непосредственно с получением действующего вращающего момента (момента силы, "скручивающего усилия") и наоборот, и, в этом отношении, эквивалентных.
Измерительный блок, предпочтительно, выполнен в форме коромысла, изгибающегося с измерительной растягивающейся лентой, который немного отклоняет цепь и измеряет восстанавливающую силу. Рычаг 51, прикрепленный к раме 11, опирается ее концом на ползун 52, который, например, выполнен из пластмассы. Ползун наложен на цепь 41, например, с внутренней стороны, подобно натяжителю цепи, и немного отталкивает цепь наружу. Если цепь натягивается в результате воздействия силы, прилагаемой человеком при тренировке, тангенциальная составляющая силы воздействует на пластмассовый ползун, и на ползун воздействует восстанавливающаяся сила, которая пропорциональна натяжению цепи и, следовательно, скручивающему усилию. Упругий изгиб рычага 51, вызываемый таким образом, измеряется измерительным датчиком, например лентой 53 для измерения натяжения. Сигнал от измерительного датчика оценивается с помощью электроники, как описано ниже.
Для калибровки измерения силы к одной из педалей 16 прикрепляют груз известной величины, и вращение механически блокируют на маховике 18 или диске 27 маховика (фиг.7), например, при помощи блокирующего средства (не показано). Сила, измеренная при таких обстоятельствах, служит основанием для калибровки системы измерения усилия по сравнению с известным усилием, прилагаемым грузом.
Механизм сопротивления
Как показано на фиг.6, маховик 18, ведомый движением педали через зубчатую передачу 60, имеет воздушное лопастное колесо 21, которое установлено без возможности вращения по окружности лопастного колеса. Воздушное лопастное колесо 21 расположено в собственном контейнере, как части защитного ограждения 15 колеса.
Как можно видеть на фиг.7, в показанном примерном варианте осуществления изобретения тормоз 20 на вихревых токах расположен на одной оси с маховиком 18, предпочтительно, напротив него. Тормоз 20 на вихревых токах является, например, магнитным тормозом, в котором металлический диск 27 маховика взаимодействует с регулируемыми (постоянными) магнитами 28 известным образом; в альтернативном варианте, также могут быть применены другие тормоза, действующие по электромагнитному принципу. В показанном примерном варианте осуществления изобретения магниты расположены на стальном кронштейне вдоль периферийной части диска 27 и направляются к диску 27 или от него с помощью установочного механизма 29. Диск 27 состоит из стали и, например, покрыт медным кольцом. Для получения возможности полностью заблокировать вращение, в диске выполнены два отверстия 27, например отверстия, в которые могут быть вставлены со стороны блокирующие штифты (не показаны), удерживаемые в кожухе или на раме.
Механизмы сопротивления тренажерного устройства, соответствующего изобретению, дублируют сопротивления, которые возникают при движении на велосипеде. Сопротивления, воздействующие при езде на велосипеде, представляют собой: (a) сопротивление воздуха, (b) трение механических частей в велосипеде и (c) сопротивление качения между шинами и поверхностью дороги или сопротивление из-за наклона поверхности. Как правило, сопротивление воздуха составляет подавляющую пропорцию, часто составляющую больше 90% полного сопротивления, и возрастает в квадрате при увеличении скорости. Поэтому генерируемая мощность возрастает в кубе при увеличении скорости. Трение в велосипеде и сопротивление качению возрастают линейно при увеличении скорости, что соответствует мощности с квадратичной зависимостью от скорости.
В тренажере 10 используется комбинированная тормозная система для моделирования этих двух типов сопротивления. Он имеет две тормозные подсистемы, а именно, как уже описано, тормозной механизм, действующий при помощи торможения воздухом, в форме колеса 21 и тормоз 20, действующий по электромагнитному принципу. Таким образом, достигается реалистическое моделирование коэффициента сопротивления велосипеда, дающее ощущение движения на "нормальном" велосипеде. Эти две подсистемы могут быть настроены независимо друг от друга. Они не влияют на измерительное оборудование, описанное ниже. Комбинация двух тормозных подсистем делает возможным получение большого диапазона сопротивления, которое зависит от частоты работы педалями. Какие-либо внешние источники энергии не требуются.
Как показано на фиг.6, воздушное лопастное колесо 21 имеет по существу цилиндрическую кольцеобразную форму. Вдоль окружности расположено множество лопастей 25, находящихся на одинаковых расстояниях между двумя удерживающими кольцами 24 по бокам, причем каждая лопасть расположена параллельно оси вращения колеса 21 и под углом, отличным от 90° к радиусу. Когда колесо 21 вращается, лопасти 25 перемещают окружающий воздух внутрь. Таким образом, воздух всасывается через боковое окно 15b и вытесняется через отверстие 15a (фиг.2), находящееся на нижней передней стороне защитного ограждения 15 колеса; следовательно, колесо 21 затормаживается получаемой циркуляцией воздуха.
В отличие от известных тренажеров с воздушным тормозом, сопротивление в показанном оборудовании может быть установлено посредством регулирования забора воздуха на стороне статора (фиг.3), а именно посредством большего или меньшего закрывания отверстия 15a при помощи створки 22 и/или регулирования бокового окна 15b относительно его воздухопроницаемости, например, по принципу жалюзи. Таким образом, тормозящее действие благодаря сопротивлению воздуха может быть установлено в пределах большого диапазона. В частности, благодаря закрыванию отверстия 15a и окна 15b, сопротивление может быть установлено на минимальную величину, близкую к нулю, таким образом, что в системе по существу остается только механическое трение.
Сопротивление для каждой из двух тормозных подсистем может быть установлено при помощи этих мер. В показанном примерном варианте осуществления изобретения может быть выбран эффект сопротивления от 0 до 5000 Вт.
Измерение скорости педали
На фиг.8 и 9 изображено сенсорное оборудование 30 для измерения скорости педали. Два датчика 31 магнитного поля, например герконы, расположены неподвижно в непосредственной близости зубчатого колеса 19 педальной передачи. Два постоянных магнита 32 расположены в точно противоположных положениях на зубчатом колесе 19 таким образом, что в ходе вращения зубчатого колеса 19, как только каждый магнит 32 проходит мимо каждого из датчиков 31, генерируется, например, сигнальный импульс. Возникающий таким образом сигнал поступает в средство оценки и обеспечивает точное измерение количества оборотов в минуту, а также - с учетом длины кривошипа - скорости педали.
Оба датчика 31 и относящиеся к ним магниты 32 соответствуют друг другу парами, и каждый из них расположен на разных радиальных расстояниях от оси (для исключения возможности активизации одного датчика на каждой стороне магнитом другого датчика). Магниты расположены в отношении их углового положения относительно датчиков, относящихся к каждому из них относительно расположения педалей 16 таким образом, что сигнальный импульс от датчика 31 выдается в каждом случае, если происходит чередование усилия от левой педали к правой или наоборот. Как можно видеть на фиг.8 и 9, в показанном положении 0° (правая педаль ориентирована перпендикулярно вверх) один магнит находится точно в положении соответствующего ему датчика, в то время как другой магнит расположен точно против соответствующего ему датчика. Это позволяет распределять измерение и разделять распределение на левую и правую ноги и оценивать силу и мощность справа/слева, прилагаемые каждой ногой, а также сравнивать усилия двух ног (баланс).
Благодаря распределению пары магнита и датчика таким образом, чтобы они были совмещены для обнаружения положений изменения нагрузки, может быть установлено начало измерительного цикла, который обычно состоит из последовательности дискретных точек измерения. Последовательность педалей в положениях датчика, следовательно, при чередовании нагрузки, выбрана как начало серии измерений, таким образом, что, с одной стороны, точка измерения может встречаться при изменении нагрузки (где, в частности, следует ожидать минимум прилагаемой силы у неопытных велосипедистов), и, с другой стороны, серия измерений выполняется между последовательными циклами датчика при по существу постоянной скорости; так как после изменения нагрузки угловая скорость движения педали эмпирически по существу постоянна, в отличие от этого, скорость между индивидуальными шаговыми циклами часто может изменяться. Это позволяет упростить измерительный процесс, а также улучшить надежность оценки данных, зарегистрированных относительно силы, как функции положения ноги, в частности, угла поворота.
Оценка
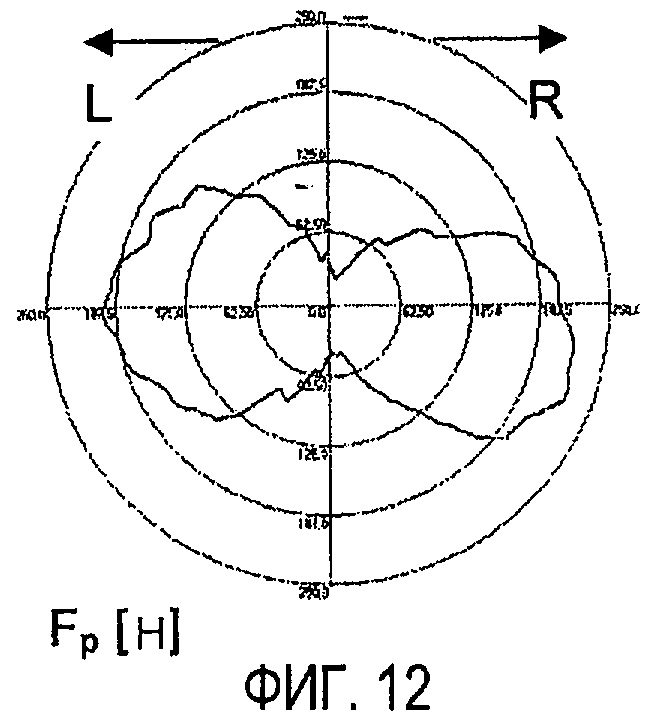
Как показано на фиг.10, сигналы датчика, выдаваемые датчиком 53 измерения силы (лентой для измерения натяжения) и датчиками 31, распределенными для измерения относительно педалей, усиливаются, переводятся в цифровую форму при помощи аналого-цифровых преобразователей и передаются в электронное средство оценки, например, дисплей 33 тренажера, расположенный на руле (фиг.11), и/или в предназначенную для этого компьютерную систему 34. В компьютерной системе 34 сигналы преобразуются в зависящем от времени процессе в приводное усилие, прилагаемое к педалям, например, со скоростью передачи данных 100 информационных точек в секунду. Кроме того, сигналы могут отображаться в режиме реального времени и/или сохраняться. Данные затем могут быть вызваны повторно и скорректированы позже. Отображение данных, предпочтительно, осуществляется относительно вращения педалей и/или на полярном дисплее, таком как показан на фиг.12.
На фиг.12 показан пример измеренного усилия Fp на педали (в Н; внешний круг соответствует 250 Н) при полном обороте педали, как функция угла поворота на полярной диаграмме. Показанные углы прямо соответствуют углу педали, которая перемещена в направлении по часовой стрелке, где 0° соответствуют расположению правой педали перпендикулярно вверх. Также следует указать, что, в частности, у тренированных спортсменов и спортсменок возникает синергия между двумя ногами, и чем лучше скоординированная способность калибруется для тренирующихся людей, тем круглее фигура кривой Fp.
В компьютерной системе 40, при помощи пригодного эргометрического программного обеспечения на экране выполняется анализ данных измерений и графическое отображение, например:
- вычисления и изображения момента педали,
- силы, как функции положения ноги,
- количества оборотов в минуту,
- скорости (вычисленной для отвлеченной скорости велосипеда),
- мощности (Вт),
- средней мощности,
- энергии (кДж посредством интегрирования),
- баланса между левой и правой ногами (в %),
- частоты сердечных сокращений (при помощи дополнительного сенсорного датчика, носимого пользователем),
- статистического анализа.
Конечно, изобретение не ограничено описанным примерным вариантом его осуществления, а скорее распространяется на все варианты осуществления изобретения, входящие в объем формулы изобретения. В частности, тренажерное устройство, соответствующее изобретению, может иметь приводные элементы, отличные от педалей, например шаговые платформы, такие как педали лестничного типа, или пару рукояток, которые поочередно приводятся в действие. Здесь движение преобразуется известным механическим образом через зубчатую передачу во вращательное движение ведущего колеса.
Реферат
Заявленное изобретение относится к спортивному оборудованию, а именно к эргометрическим устройствам. Стационарное эргометрическое тренажерное устройство включает в себя ручной или ножной привод с двумя приводными элементами, которые приводятся в действие поочередно. Измерительный прибор для измерения приводного усилия, прилагаемого к приводу, или относящегося к нему скручивающего усилия, содержит измерительный прибор (30) для измерения углового положения привода, имеющее пару сенсорных устройств (31, 32), которые расположены в положениях друг против друга относительно колеса (19), которое соединено с приводом таким образом, что оно движется синхронно с ним. Причем каждое положение соответствует в движении положению чередования нагрузки между двумя приводными элементами (16). Компьютерное устройство может принимать сигналы от устройства измерения силы и на их основе вычислять развитие во времени приводного усилия или скручивающего усилия, а также переменные, которые могут быть выведены из него, и поочередно выдавать данные по правой или левой конечности для тренирующегося человека в зависимости от чередования нагрузки, зарегистрированного измерительным прибором (30). Технический результат заключается в увеличении точности показаний прикладываемой силы и достигается за счет возможности регистрации усилий прикладываемых раздельно, слева и справа. 3 н. и 15 з.п. ф-лы, 12 ил.
Формула
отличающееся тем, что устройство включает в себя колесо (19), соединенное с приводом таким образом, что оно синхронно движется с ним, и измерительный прибор (30) имеет пару сенсорных устройств, которые расположены в положениях относительно колеса (19), причем сигнал генерируется, когда колесо (19) расположено в каждом из двух определенных угловых положений в движении, положения соответствуют точкам чередования нагрузки между поочередно приводимыми в действие приводными элементами.
отличающееся тем, что устройство включает в себя колесо (19), соединенное с приводом таким образом, что оно синхронно движется с ним, и измерительный прибор (30) имеет по меньшей мере один датчик (31) и по меньшей мере один сенсорный компонент (32), расположенные в положениях друг против друга относительно колеса, каждое из упомянутых положений соответствует положению в движении при чередовании нагрузки между приводными элементами.
(i) измеряют приводное усилие, приложенное посредством приводных элементов, или относящийся к нему вращающий момент;
(ii) обнаруживают моменты времени чередования нагрузки между поочередно приводимыми в действие приводными элементами; и
(iii) вычисляют и непрерывно выводят развитие во времени приводного усилия или относящегося к нему вращающего момента, а также переменных, выведенных из приводного усилия, на основе измерений, полученных на этапах (i) и (ii).
(iv) распределяют переменные, вычисленные на этапе (iii) поочередно относительно правой или левой конечности тренирующегося человека в зависимости от моментов времени чередования нагрузки, обнаруженных на этапе (ii).
Комментарии