Способ и устройство для контроля рулевого управления прямого действия динамических систем - RU2429144C2
Код документа: RU2429144C2
Чертежи


Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение фокусируется на том, каким образом ручное управление динамической системы, которая может быть машиной, транспортным средством, судном, самолетом, строительным оборудованием, строительной машиной, военной системой, инструментальной системой или любой совсем другой динамической системой, которая вручную управляется человеком, должно лучше контролироваться относительно человеческого фактора, и какой способ лучше всего пригоден для поддержания и использования человеческих свойств относительно наилучшего реагирования в человеко-машинном интерфейсе на предупредительные сигналы, такие, которые могут быть вызваны не соответствующим требованиям (недостаточным) управлением по отношению к устройству управления.
Область техники изобретения может быть задана названием «система активного контроля», когда изобретение применяется к моторному транспортному средству в качестве управляемой системы. Заявка действительна до тех пор, пока имеет место управление с помощью руки человека, происходит ли это непосредственно или посредством систем управления с усилением и/или стабилизацией.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Большая заинтересованность была направлена, для применения в моторных транспортных средствах, на задачу устранения опасностей, ассоциативно связанных с недостаточной внимательностью за рулем, чем-то, что может иметь различные причины и выражения. Причины могут включать в себя отвлечение внимания в связи с другой деятельностью, такой как мобильный телефон, радио и другие источники звука, или навигация, либо другое занятие. Одной из центральных причин может быть утомленность, которая в наихудшем случае может приводить к водителю, засыпающему за рулем.
Несколько технических решений уже известны и многие из них были коммерчески реализованы, например меры, которые освобождают водителя от нежелательных возмущений от мобильных телефонов и тому подобные. В случае отвлечения внимания и недостаточной внимательности или растущей утомленности водителя при вождении по автостраде он или она могут непреднамеренно выполнять недостаточное управление рулевым колесом, так что автомобиль отклоняется на другую полосу движения. Уже доступны автомобили, которые снабжены системами, которые регистрируют отклонения от текущей полосы движения и могут использовать сигнал тревоги, чтобы оповещать водителя, куда направлен автомобиль. Такие системы также могут запускать другие защитные механизмы в транспортном средстве. Некоторые из этих систем, однако, требуют, чтобы линии на проезжей части, которые определяют полосы движения, были видны, чего-то, что не всегда возможно.
Одно из технических решений для сокращения аварий с одним автомобилем, которые вызваны невнимательностью, утомленностью или засыпанием за рулем и которые оказали значительное влияние на частоту аварий в США, состоит в снабжении автострад предохранительными полосами, которые вызывают вибрирующий звук в автомобиле, если колеса переходят через предохранительные полосы.
Преимуществом этого способа является его простота. Однако недостаток, который имеет место в описанном ранее способе, здесь состоит в том, что опасность обнаруживается, только когда неправильное управление уже оказало воздействие на положение транспортного средства, а это может быть слишком поздно.
Также известно, что следует регистрировать величину угла поворота рулевого колеса и регистрировать бездействие рулевого колеса в качестве показателя невнимательности водителя, что состоит в регистрации крутящего момента и в описанном в заявке WO 2005/059857 по договору PCT исследовании не только бездействия, но также и последующего движения рулевого колеса, и расчете в компьютерной программе рисков невнимательности, которая определена параметрами, и что следует поднимать тревогу на основании расчета.
Другие технически известные решения по проблеме утомленности были направлены на определение движений глаз и/или движений век водителя, которые находятся под влиянием разных степеней утомленности, и предоставление таким наблюдениям после обработки возможности создавать входные сигналы в систему предупреждений и действий на транспортном средстве. Решения в отношении этого, однако, являются технически новаторскими и, таким образом, могут быть предрасположены к нарушениям работы. Соприкосновение руки водителя с рулевым колесом и местоположения рук вокруг рулевого колеса сформировались на основе некоторых известных способов в связи с системами предупредительной сигнализации на моторных транспортных средствах.
Известны способы для моторных транспортных средств, которые основаны на регулярной проверке скорости реакции и, таким образом, также степени осведомленности о состоянии водителя. Патент Германии, DE 19518914, описывает устройство для проверки внимательности и способности реагирования водителя моторного транспортного средства, это устройство испускает сигнал, прием которого должен подтверждаться водителем посредством нажатия пальца на рулевое колесо. Описания патентов в JP 4183439A1 и JP 5345569 охватывают обнаружение и анализ соприкосновения водителя с рулевым колесом, в первом случае - с помощью устройства, которое записывает электрокардиограмму с последующим анализом степени осведомленности о состоянии водителя, и во втором случае - с учетом измерения сил, приложенных к рулевому колесу.
Из заявки US 20030189493 на патент известно, что датчики для определения того, что имеет место прикосновение руки, могут располагаться определенным заданным образом по окружности рулевого колеса, посредством этих датчиков местоположения рук и история их местоположений могут анализироваться и сравниваться с данными из статистики известных несчастных случаев и т.п. Способ для емкостного измерения соприкосновения между руками водителя и рулевым колесом или другим устройством управления известен из патентной заявки US 20020170900.
КРАТКАЯ СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к способу для контроля внимательности во время ручного управления динамической системой, в котором обнаруживаются недостатки управления и выдаются предупредительные сигналы, и он отличается тем, что упомянутые предупредительные сигналы создаются в виде вибраций (w1) и (w2) в физико-механическом интерфейсе упомянутой системы между человеком и машиной (PM), где вибрации создаются с такими частотами, амплитудами и длительностями, что капсулированные нервные окончания Мейсснера (MC) и капсулированные нервные окончания Пачиниана (PC) на внутренних поверхностях рук и пальцев активировались, когда рука человека приходит в соприкосновение с устройством (W) управления для управления упомянутой системой (V), и тем, что недостатки внимательности рассчитываются на основе управляющих движений упомянутого устройства управления.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение отличается от известных способов и систем устройств тем, что оно выдает сигналы, которые были определены на медико-технической основе, непосредственно в мозг человека через два типа заданных чувствительных капсулированных нервных окончаний на руках особенно эффективным, распознаваемым и приятным образом, коль скоро пропадает нормальная модель управления.
Изобретение основано на и объединяет результаты четырех известных явлений. (1) В медицине известно, что кожа внутренней стороны рук и пальцев людей снабжена несколькими типами чувствительных капсулированных нервных окончаний, два из которых, капсулированные нервные окончания Мейсснера и капсулированные нервные окончания Пачиниана, имеют возможность испускать очень быстрые и мощные импульсы в мозг, когда они раздражаются вибрациями определенных частот, амплитуд и длительностей. (2) В медицине также известно, как работает мозг при нарастающей утомленности, засыпании и пробуждении. Таким образом, известно, что сон является естественным процессом в мозге человека, который происходит немедленно после периода расслабления, и что все сознательные движения мышц, управляемые человеком, прекращаются, как только человек засыпает. Более того, известно, что переход от сна к пробуждению и сознательному состоянию также может незамедлительно происходить в мозге, когда приходит внешнее возмущение достаточной интенсивности и природы, естественно, при условии, что вовлеченный человек здоров и не находится под влиянием лекарств, алкоголя или другого фактора. (3) Более того, широко известно, что чувствительность рук активно привлекается во время ручного управления, при котором руки находятся в соприкосновении с устройством управления. (4) В заключение, мы знаем, что управление несколькими группами динамических систем обычно требует многочисленных небольших поправок и управляющих импульсов, которые следуют близко друг за другом во времени. Динамические системы могут подвергаться внешним возмущающим воздействиям. Динамические свойства системы зависят от количества физических параметров управляемой системы, самой системы управления и природы возмущений. В случае моторных транспортных средств, которые подробно изучали изобретатели, динамические свойства транспортного средства, вообще, имеют такую природу, что небольшие поправки с использованием движения рулевого колеса, близко разнесенные во времени, составляют поведение нормального управления, требуемое, чтобы удерживать транспортное средство на требуемой полосе движения при вождении по автостраде.
Настоящее изобретение выявило выгоду этих четырех явлений, и оно определяет способ и систему, которые контролируют движение устройства управления и, в случае недостаточного управления, формируют сигналы тревоги в виде распознаваемых пакетов вибраций, которые особенно хорошо распознаются двумя заданными чувствительными органами в коже внутренней стороны руки и пальцев, в частности, в случае ослабленного захвата на рулевом колесе. Изобретение, таким образом, раскрывает самый быстрый и наиболее безопасный путь для предупредительных сигналов в мозг управляющего человека, и это ведет к наиболее быстрой инстинктивной реакции от мозга по той причине, что реакция идет в ту же часть тела, из которой приходит сигнал тревоги. Таким образом, изобретение отличается от других известных до настоящего времени способов не только безопасностью сигналов тревоги, но также и скоростью реакции в ответ на сигналы. Изобретение обеспечивает благоприятную возможность для индивидуальной адаптации и настройки параметров природы и уровней сигналов тревоги. Система согласно изобретению может легко интегрироваться с другими системами в моторном транспортном средстве или в любой другой динамической системе.
ОПИСАНИЕ ЗАДАЧИ
Во время ручного управления динамической системой, такой как транспортное средство, судно или любая другая управляемая система, одна или более рук находятся в соприкосновении с устройством управления, которое может быть рулевым колесом, джойстиком, рулем поворота или тому подобным. Рулевое колесо транспортного средства будет обсуждено в описании, приведенном ниже, для целей простоты, но описание и изобретение может касаться, в применяемых частях, других типов устройства управления и других типов наполненных опасностью ситуаций, нежели описанные. Рулевое колесо образует непрерывный человеко-машинный интерфейс при вождении транспортного средства, наряду с тем, что педаль акселератора, тормозная педаль, рычаг переключения передач и другие элементы управления составляют прерываемые интерфейсы. Управление рулевым колесом, наряду с управлением акселератором и тормозом, является жизненно важной задачей, которой водитель должен непрерывно уделять его или ее внимание при вождении, пока технология транспортных средств основана на ручном управлении. Реальная задача управления, как и вся деятельность человека, подчинена мозгу, даже если мозг получает помощь от заранее запрограммированных нервных систем, в которых были сохранены и могут использоваться двигательные модели и другие модели действий. В своем неутомленном, не находящемся под влиянием и здоровом состоянии мозг способен к управлению такому, чтобы управлять моторным транспортным средством даже в ситуациях затрудненного дорожного движения. Мозг принимает, интерпретирует и координирует импульсы на основании входящих сигналов с помощью пяти чувств: зрения, слуха, осязания, обоняния и вкуса. Во время реальной задачи вождения основными ощущениями являются ощущения зрения и слуха и таковые от осязания, главным образом, в руках, но также восприятие в других частях тела, с помощью которых могут определяться такие явления, как ускорение, торможение, кривизна дороги и поперечное ускорение. Задачи глаз и зрения являются центральными в безопасности движения. Известно, что водитель часто смещает точку взгляда в нормальном случае на кромки дороги и на пересекающие дороги, и известно, что растерянный или утомленный водитель имеет склонность удерживать точку взгляда более неподвижной и направленной прямо вперед на дорогу, получая таким образом ухудшенную способность обнаруживать опасности движения с боков, например, на дорожных перекрестках. Также известно, что повышение утомленности часто влечет за собой расслабление мышц, которое регулярно происходит при засыпании. Расслабление водителя автомобиля может приводить к более мягкому захвату руки, и руки оказываются в положении покоя. Дополнительное известное следствие состоит в том, что движения рулевого колеса происходят реже и с большей амплитудой, и это имеет последствие, что путь движения автомобиля становится более искривленным. Когда водитель полностью заснул, руки могут быть лежащими без усилия на рулевом колесе или, в наихудшем случае, могут полностью отпускать рулевое колесо. Особенно важно, в этом контексте, рассмотреть вождение по автостраде на высоких скоростях. Известно, что опасность потери внимательности повышается во время монотонного вождения в течение длительного периода утомления, и известно, что опасность аварии увеличивается с повышением скорости. По этой причине мы будем рассматривать, в качестве части описания задачи, водителя, который ведет моторное транспортное средство на нормальной скорости по автостраде. Предполагается, что скорость лежит между 90 и 150 км/ч, в зависимости от местных ограничений скорости. Теперь рассмотрим утомленного водителя за рулевым колесом: может возникать ситуация, в которой водитель начинает засыпать, мышцы начинают расслабляться и наступает сон, так что количество движений рулевого колеса в единицу времени постепенно становится меньшим и, в заключение, становится нулевым, когда приходит сон. Если мы дополнительно учтем, что была вовлечена автоматическая система поддержания заданной скорости автомобиля или что не меняется положение педали акселератора, то получим ситуацию, в которой она является основанием для имеющихся в распоряжении секунд, за которые следует предотвратить серьезную аварию. Автомобиль будет проезжать 25-42 метра за одну секунду при заданном диапазоне скоростей и 250-420 метров за 10 секунд. Очень быстро действующий способ требуется для того, чтобы избежать дорожного происшествия со смертельным исходом, что-то, что предлагает настоящее изобретение.
РЕШЕНИЕ
Способ согласно настоящему изобретению использует человеко-машинный интерфейс не только для обнаружения недостатка управления благодаря регистрации движения устройства управления, но также для пробуждения внимательности посредством предупредительных сигналов в мозг человека из так называемых капсулированных нервных окончаний Мейсснера и капсулированных нервных окончаний Пачиниана в коже внутренней поверхности руки и пальцев человека, когда в соприкосновении с устройством управления и благодаря регистрации, в пределах доли секунды, прямого ответа на том же самом интерфейсе и, если ответ отсутствует, инициации непрерывных мер для пробуждения внимательности и повышения безопасности, для того чтобы предотвратить или уменьшить результаты недостаточного управления. Быстрота способа согласно изобретению основана на нескольких влияющих друг на друга факторах. Медицинское исследование показало, что мозг человека чувствует вибрации на внутренней поверхности кожи рук и пальцев быстрее, чем любом другом сенсорном входе. Эта способность мозга чувствовать сенсорный вход, среди прочих факторов, находится под влиянием возраста индивидуума, температуры рук во время ввода и того, был ли индивидуум работающим с вибрационными инструментами непосредственно перед вводом. Согласно этому способу предупредительный сигнал водителю в человеко-машинном интерфейсе подается непосредственно в мозг и не требует никакой интерпретации, поскольку он получается непосредственно из человеко-машинного интерфейса и, таким образом, непосредственно связан с задачей управления. Два вывода могут быть получены из прямого ответа менее чем за секунду в виде движения рулевого колеса: так что водитель по-прежнему имеет свои руки в соприкосновении с рулевым колесом, когда приходит предупредительный сигнал, и что он или она почувствовал ощущение осязания и, таким образом, был пробужден ото сна и восстановил управление рулевым колесом. Первая реакция, не считая той, что от восстановления функции памяти и чувства зрения, которая дает повышенное вникание в ситуацию, возникнет от движения рулевого колеса, которое является не только инстинктивным, поскольку предупреждение возникает в соприкосновении руки с рулевым колесом, но также и осознанным, поскольку мозг был пробужден к осознанию. Изобретение, таким образом, применяет человеко-машинный интерфейс как для задачи детектирования недостатков в управлении, так и для задачи привлечения внимания человека в управлении к задаче управления. Это то, на чем лежит фундаментальная причина для обеспечения быстроты и простоты способа. Допущение длительности периода без движения рулевого колеса для формирования основы сигнала тревоги в случае недостатков управления, как делается в случае моторного транспортного средства, является одной из основных идей изобретения. Эта идея была подтверждена благодаря исследованиям и практическим экспериментам, которые выполнили изобретатели. Эксперименты происходили, в частности, во время обычного вождения по автостраде, тем самым были изучены частота и ритм движения рулевого колеса, в частности интервал между сознательными движениями рулевого колеса. Эксперименты показывают, что оно является объектом небольших поправок, которые обычно возникают через период, который типично равен одной секунде или нескольким секундам. Эксперименты, выполненные с разными водителями, показали среднее значение, немного большее чем 32-78 движений рулевого колеса в минуту, или 0,5-1,2 движения рулевого колеса в секунду, в пределах области изменений, 20-80 движений рулевого колеса в минуту. Наблюдения были предприняты в течение периода в одну минуту на промежутке времени, в течение которого было рассчитано количество сознательных движений рулевого колеса, где каждое движение рулевого колеса после неподвижного состояния рулевого колеса было посчитано в качестве одного движения рулевого колеса, независимо от его направления и его амплитуды. Движения не происходили с постоянной частотой: они часто совершались группами по 2-3 движения, чаще, например, во время обгона или новых ситуациях дорожного движения. Однако, даже во время спокойствия, монотонное и непрерывное вождение по автостраде по прямой полосе вождения, движения рулевого колеса возникают для того, чтобы выполнять небольшие поправки, обычно в пределах периода в 1-4 секунды после предыдущего движения рулевого колеса. Движения рулевого колеса возникают реже, с большими временными промежутками между ними, когда внимательность находится на низком уровне, как в случае для утомленного водителя, и они могут иметь большую амплитуду, вероятно, для того, чтобы быть способным скорректировать ошибку в направлении вождения, которая уже возникла. Более того, для того, чтобы учесть повышенную опасность аварии на высокой скорости, способ согласно изобретению включает в себя предоставление на отрезке дороги, пройденному с момента самого последнего движения рулевого колеса, возможности определять повышение тревоги. Отсутствие прямого ответа предполагает, что возникла опасная ситуация: либо руки водителя уже потеряли соприкосновение с рулевым колесом, либо бессознательное состояние настолько глубоко, что даже вибрации рулевого колеса, заданные согласно изобретению, не достаточны, чтобы нарушить его. Способ и система согласно изобретению, в этой ситуации, предоставляют возможность, чтобы сигнал тревоги повышался и чтобы инициировались другие известные системы для активной безопасности, такие как способы для внешней и внутренней сигнализации, автоматическое вмешательство в продвижение транспортного средства и подобные способы.
Система согласно изобретению, в случае моторного транспортного средства, содержит по меньшей мере следующие части: средство для детектирования сознательных движений рулевого колеса, средство для расчета отрезка дороги, пройденного, начиная с самого последнего сознательного движения рулевого колеса, средство для управления возбуждением сигнала тревоги, следуя требованиям, заданным способом, средство для управления механическими вибрациями в устройстве управления, рулевом колесе, в соответствии с этими требованиями, на поверхностях, которые находятся в соприкосновении с рукой водителя при вождении, и, таким образом, который определяет способ и средство для такой интеграции с системами на транспортном средстве, которые считаются необходимыми и пригодными. Может быть уместным, чтобы рабочие состояния системы и любые сигналы тревоги, которые она провоцирует, регистрировались в бортовом компьютере и/или тахографе.
ПРЕИМУЩЕСТВА
Настоящее изобретение быстрее и безопаснее, чем любой другой известный способ или известная система, обеспечивает функцию побуждения человека к внимательности во время ручного управления посредством непосредственной отправки сигнала тревоги в мозг через руки, которые вовлечены в задачу управления, наиболее эффективным, распознаваемым и приятным образом, используя два восприимчивых к вибрации чувствительных капсулированных нервных окончания в коже и немедленно регистрируя ответ из мозга в ту же самую часть тела, на которой расположены чувствительные капсулированные нервные окончания, которые являются испускающими сигналы, каковой процесс очень подобен инстинктивной реакции на ощущение боли или более низкий уровень ощущения восприятия. Благодаря предоставлению обратной связи из управляемой системы возможности быть основанной на движении устройства управления, как делается согласно способу, предпочтительнее чем на перемещении транспортного средства, тем самым устраняются временная задержка и сдвиг фаз, которые, в противном случае, воздействовали бы на обратную связь, и, таким образом, повышается быстрота способа. Дополнительным преимуществом способа согласно изобретению является его простота, которая также оказывает положительное влияние на его безопасность и надежность.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 показывает схематическую структурную схему ручного управления динамической системой с добавлением системы 1 контроля согласно изобретению.
Фиг.2 показывает огибающую кривую пакетов вибрации согласно изобретению.
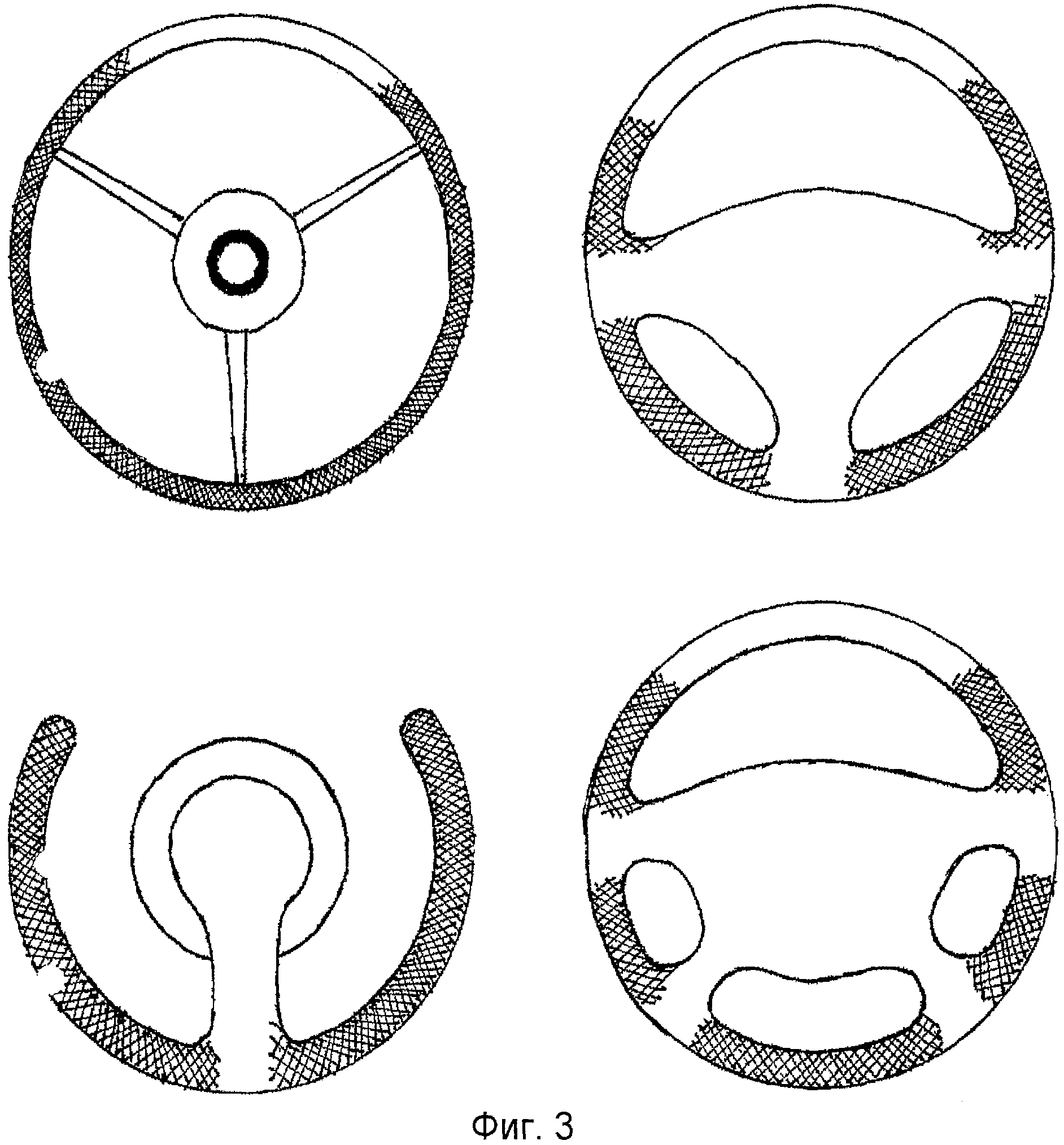
Фиг.3 показывает примеры местоположений вибраторов 6 рулевого колеса согласно изобретению.
ОПИСАНИЕ ПРЕДЛАГАЕМОГО В НАСТОЯЩИЙ МОМЕНТ ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
Способ, система и компоновки согласно одному из вариантов осуществления изобретения будут описаны ниже со ссылкой на чертежи, перечисленные выше. Для того чтобы привести изобретение в его соответствующий контекст, связи в пределах управляемой вручную системы, в принципе, показаны на фиг.1 пунктирными линиями, а дополнительная система контроля согласно изобретению - сплошными линиями:
D обозначает человека в процессе управления, «Водителя»,
H обозначает руку этого человека, «рука»,
W обозначает устройство управления, «рулевое колесо»,
PM обозначает физико-механический человеко-машинный интерфейс, «физико-механическую границу»,
V обозначает управляемую систему, «транспортное средство»,
E обозначает окружение управляемой системы, «среду»,
S обозначает ощущения, «ощущения»,
I обозначает измерительные приборы, «измерительные приборы»,
f1 обозначает перемещения управляемой системы, которые могут детектироваться, «обратную связь 1»,
f2 обозначает обстановку окружения, которая может детектироваться, «обратную связь 2»,
f3 обозначает данные измерительных приборов, «обратную связь 3».
В то время как подразумевается, что должны показывать стрелки на фиг.1, управляющий человек D выполняет управляющие движения устройством W управления с использованием H рук, каковое устройство управления управляет системой V. Имеет место обратная связь через управляющего человека D, чувствующего поведение f1 управляемой системы V благодаря его или ее ощущениям S, наблюдающего окружение E через f2 и считывающего измерительные приборы I через f3. Когда применяется к случаю моторного транспортного средства, управляющим человеком D является водитель, устройством управления является рулевое колесо, управляемой системой V является моторное транспортное средство, а окружением E является ситуация дорожного движения. В связи с системой контроля согласно изобретению, следующие символы были добавлены на чертеже:
1 обозначает систему контроля согласно изобретению,
2 обозначает блок управления с электронными схемами в системе контроля,
3 обозначает датчики на или в устройстве управления,
4 обозначает осцилляторы и их схемы возбуждения,
5 обозначает усилители и смесители,
6 обозначает вибраторы в устройстве управления,
w1 обозначает предупредительные сигналы в MC, «предупредительный сигнал 1»,
w2 обозначает предупредительные сигналы в PC, «предупредительный сигнал 2»,
MC обозначает капсулированные нервные окончания Мейсснера в руке, «капсулированные нервные окончания Мейсснера»,
PC обозначает капсулированные нервные окончания Пачиниана в руке, «капсулированные нервные окончания Пачиниана»,
a обозначает сигналы из MC+PC по нервным путям, «сигнал тревоги»,
f4 обозначает сигналы с датчиков на устройстве управления, «обратную связь 4»,
f5 обозначает выбранные данные из управляемой системы, «обратную связь 5»,
f6 обозначает выбранные данные из системы контроля, «обратную связь 6»,
9 обозначает системы активной безопасности транспортного средства,
10 обозначает бортовой компьютер транспортного средства и/или тахограф транспортного средства.
Вспомогательная система 1 контроля имеет следующие функции: Согласно изобретению система замечает недостатки в управлении, главным образом, через недостатки в движениях f4 устройства W управления. Когда эти недостатки присутствовали в продолжение определенного зарегистрированного отрезка пройденного пути, согласно способу изобретения система 1 генерирует предупредительные сигналы w1 и w2 при определенных, заранее запрограммированных и настроенных условиях, через по меньшей мере один пакет распознаваемых вибраций такой силы и природы в человеко-машинном интерфейсе PM, что они легко обнаруживаются двумя типами чувствительных капсулированных нервных окончаний MC и PC в кожном покрове внутренней поверхности рук и пальцев, которые остаются в соприкосновении с устройством W управления, вибрации имеют такую природу, частоту, амплитуду и длительность, что явный импульс проводится в восходящем направлении вдоль нервных путей в мозг и побуждает мозг к осознанию. Согласно изобретению недостатки в управлении, в основном, детектируются благодаря измеренным значениям с датчиков 3, которые регистрируют, f4, каждое преднамеренное управляющее движение, большее чем приблизительно 0,5 градуса, независимо от его направления, непосредственно в связи с устройством W управления. Датчик 3 передает сигнал, f4, в каждом случае, при котором происходит такое движение рулевого колеса, в блок 2 управления, который содержит в себе логические схемы. В случае моторного транспортного средства блок управления в транспортном средстве V накапливает мгновенное приращение f5 отрезка пройденного пути, которое добавляется в счетчик в блоке управления после самого последнего движения рулевого колеса. Датчик 3 передает сигнал f4 в блок 2 управления, который сбрасывает этот счетчик в ноль на каждое движение рулевого колеса, которое выполняется. Если такой сигнал не придет в продолжение отрезка пройденного пути, следующего за самым последним движением рулевого колеса, который достигает порогового значения, которое хранится в блоке 2 управления и которое может настраиваться посредством использования определенных элементов 7 управления, в таком случае, согласно изобретению, это является достоверным показателем недостаточного управления. Когда счетчик достиг такого заранее запрограммированного порогового значения, блок управления выдает импульс в схемы 4, 5 возбуждения вибраторов 6, схемы которого работают по программе, которая хранится в блоке 2 управления. Уместно, чтобы система контроля содержала компоновку 7 ручной настройки, с помощью которой могут настраиваться амплитуды вибраций, пороговые значения и другие параметры. Более того, система может передавать водителю дополнительные сигналы f6, такие как звуковые или световые сигналы, информацию о состоянии, уровень тревоги и значения, которые были установлены, в том числе сигналы на приборную панель или дисплей I. Рабочее состояние и аварийные сигналы системы контроля могут регистрироваться в бортовом компьютере или тахографе 10, а ее подключение и отключение может управляться скоростью транспортного средства. Она может иметь блокировку, в зависимости от правил дорожного движения от ручного отключения. В случае применения транспортного средства пакет вибраций по меньшей мере типа w1 или типа w2, а предпочтительно обоих, w1 и w2, одновременно и, предпочтительно, распознавание последовательности пакетов должно приводить к водителю, немедленно восстанавливающему управление. Если это происходит, счетчик в блоке 2 управления сбрасывается в ноль после приема сигнала f4 из 3, после чего блок 2 управления передает сигнал остановки в схемы 4 аварийной сигнализации так, чтобы выработка сигналов прекращалась. Если управление не восстанавливается, так что никакие сигналы не испускаются из датчика 3, значение в счетчике блока 2 управления продолжает возрастать, в силу чего блок управления может быть запрограммирован, чтобы сначала повышать амплитуду w1 и w2, а впоследствии активировать известные системы 9 безопасности на транспортном средстве. Исторические данные сигналов тревоги могут храниться в бортовом компьютере или тахографе, если это требуется. Система 1 контроля и ее блок 2 контроля, а также ассоциативно связанные схемы здесь описаны, ради ясности, в качестве отдельной системы с отдельными частями в связи с настоящим изобретением, но это принадлежит объему изобретения и природе вещей, так что ее функции и блоки могут быть объединены в управляемой системе, такой как моторное транспортное средство, некоторым образом, который является и функциональным, и экономичным, и полезным с точки зрения производства, с другими электронными схемами, такими как бортовой компьютер, тахограф, контрольно-измерительные приборы, кабельная сеть и другие компоненты транспортного средства. Недостаточная внимательность определяется согласно способу изобретения в качестве длительности прекращения движений рулевого колеса, измеряемых на участках отрезка f5 дороги, пройденных вслед за самым последним движением рулевого колеса. Если бы подсчитывалось только время длительности прекращения движения рулевого колеса, способ и система не принимали бы во внимание значительное влияние на опасность аварии и на последствия аварии, которым обладает действующая скорость движения. Внимательность регистрируется в качестве каждого небольшого сознательного движения f4 рулевого колеса, которое, соответственно, сбрасывает счетчик в блоке 2 управления, каковой счетчик измеряет отрезок пройденного пути после самого последнего движения рулевого колеса. Регистр сбрасывается в ноль также при каждой скорости, которая является меньшей чем, например, 50 км/ч, каковое, в таком случае, означает, что система контроля предназначена для функционирования на скорости, которая превышает 50 км/ч. Мгновенное значение регистра, таким образом, составляет показатель длительности недостаточной внимательности относительно последствий. Разные уровни тревоги могут выбираться и сохраняться в схемах 2 расчета системы контроля в виде определенных пороговых значений, которые вызывают возбуждение разных амплитуд сигнала тревоги и меры 9 для предотвращения аварий. Если выбираемые и настраиваемые пороговые значения, например, выбраны являющимися 200, 300 и 400 метров, то они соответствовали бы временным интервалам в 6, 5, 9, 8 и 13 секунд, соответственно, при скорости в 110 км/ч. Датчик 3 для детектирования движения рулевого колеса может быть разных типов и конструкций, и он может быть основан на известной технологии для измерения положения, выполняемого угла или движения из условия, чтобы устойчивым и надежным образом с достаточной точностью мог детектировать каждое осознанное управляющее движение устройства управления, и из условия, чтобы влияния других возмущающих факторов - выбоин на дороге или вибраций - могли отфильтровываться с использованием известной технологии. Вибраторы 6 согласно изобретению могут быть совершенно любого известного типа. Могут выбираться колеблющиеся механические вибраторы, которые возбуждаются электромагнитным образом и которые питаются от одного или более силовых каскадов 5 с или без смесителей, которые, в свою очередь, питаются предпочтительно от двух схем 4 осцилляторов через усилители 5, и они могут управляться блоком 2 управления не только по программе сигнала тревоги, такой как программа его запуска, останова, длительности, пауз и амплитуды, но также по параметрам, которые вводятся, таким как настройки частоты и уровня громкости. Частоты сигналов w1 и w2 выдаются в соответствующих схемах 4 осцилляторов, и они проходят через схемы 5 усилителей с или без смесителей и отдельные силовые каскады. В случае, который был описан, вынужденные вибрации возникают с обеими частотами одновременно в общем типе вибратора. Альтернативный вариант состоит в том, что отдельные вибраторы используются для двух частотных диапазонов. Амплитуды регулируются автоматически согласно программе сигнала тревоги, которая была введена в блок управления, параметры которой могут настраиваться вручную посредством блока 7. Настройка определенных частотных диапазонов может выполняться одинаковым образом, например, одновременно 20-40 Гц и 200-300 Гц.
Согласно одной из конструкций вибрации повторяются через некоторое предопределенное время после того, как возникло отсутствие управления. Например, повторение может происходить 15 минутами позже, для того чтобы предотвращать повторное возникновение засыпания за рулем.
Модель сигнала тревоги, которая проиллюстрирована на фиг.2, управляется программами в блоке 2 управления, параметры которых могут предварительно настраиваться с использованием блока 7. Фиг.2 дает пример подходящей модели для вибрационных сигналов w1 и w2 согласно способу изобретения, чтобы настораживать человека, который выполняет ручное управление. Кривая на чертеже образует огибающую амплитуды вибрационных пакетов. Частотами сигналов, которые дают наибольшее воздействие на капсулированные нервные окончания Мейсснера и капсулированные нервные окончания Пачиниана, являются приблизительно 30 Гц и 250 Гц, соответственно, и они должны выдаваться в распознаваемой последовательности пакетов одинаковых или отличающихся длительностей в 250-750 мс, сопровождаемых паузами, длительностью в по меньшей мере 150 мс, и непрерывно возрастающими амплитудами, как предложено на чертеже. Способ и система содержат пробуждение немедленной внимательности водителя отправкой тактильных предупредительных сигналов w1 и w2, главным образом, на два специально заданных набора чувствительных капсулированных нервных окончаний в коже на внутренней стороне рук и пальцев. Длительности пакетов могут следовать выбранной модели, сигналу кода Морзе, например, для того, чтобы получать повышенную легкость распознавания. Все требуемые уровни тревоги могут выбираться в пределах объема изобретения, и изобретение не ограничено некоторыми значениями уровня тревоги в качестве показателя недостаточной внимательности. Может быть несколько причин для желания устанавливать отдельные значения для амплитуд сигналов тревоги в системе. Пороговые значения для реакции чувствительных капсулированных нервных пучков на вибрации повышаются с увеличением возраста и с понижением температуры кожи и могут изменяться между индивидуумами.
В рассмотренном объеме специалист в данной области техники способен устанавливать индивидуальный уровень для вибраций.
Фиг.3 приводит примеры местоположений вибраторов рулевого колеса на рулевых колесах различных конструкций. Заштрихованные области вокруг окружности рулевого колеса были указаны в качестве возможных местоположений, где лежат руки водителя и где они могут предполагаться лежащими в расслабленных состояниях. Местоположение, согласно изобретению, не ограничено предложенными положениями: они могут выбираться в каждом индивидуальном случае так, чтобы вибрации достигали внутренних поверхностей рук и/или пальцев, когда рука захватывает или лежит на рулевом колесе. Предпочтительно, чтобы вибраторы рулевого колеса согласно изобретению были интегрированы в конструкцию рулевого колеса, но они также могут изготавливаться для внешнего расположения на рулевом колесе.
Настоящее изобретение для контроля ручного управления динамической системой было подробно описано для применения касательно управления моторными транспортными средствами, каковое применение может быть реализовано разными способами, но не ограничено вариантами осуществления, описанными здесь и на чертежах, поскольку оно может меняться в пределах объема прилагаемой патентной формулы изобретения.
Реферат
Группа изобретений относится к области обеспечения безопасности управления динамическими системами, преимущественно транспортными средствами. Способ и устройство используют осязание рук человека для приема, в частности, когда мышцы расслаблены, определенных типов вибраций через два набора чувствительных капсулированных нервных окончаний в коже человека, известных как капсулированные нервные окончания Мейсснера и капсулированные нервные окончания Пачиниана. Используется также способность мозга выдавать немедленную реакцию на эти сигналы в той же области контакта с объектом, к которому такие два набора чувствительных капсулированных нервных окончаний являются прикасающимися во время управления, и с немедленной обратной связью от устройства управления динамической системы. Группа изобретений раскрывает самый быстрый и наиболее безопасный путь для предупредительных сигналов в мозг управляющего человека и обеспечивает наиболее быструю инстинктивную реакцию от мозга, поскольку реакция идет в ту же часть тела, из которой приходит сигнал тревоги. 2 н. и 13 з.п. ф-лы, 3 ил.
Комментарии