Способ сейсмической съемки - RU2729952C2
Код документа: RU2729952C2
Чертежи








Описание
Область техники
Настоящее изобретение относится к способам и оборудованию, используемым для сейсмической съемки, и, в частности, для корректировки дрейфа генераторов тактовой частоты в сейсмических датчиках.
Уровень техники
Сейсмическая съемка, или сейсмическая разведка методом отраженных волн, используется для картирования подземных структур. Управляемый источник сейсмических сигналов генерирует низкочастотные сейсмические волны, распространяющиеся сквозь земную толщу. На границах раздела между слоями пород с различающимися свойствами происходит частичное отражение этих сейсмических волн. Отраженные волны возвращаются на поверхность, где регистрируются сейсмическими датчиками (или сейсмометрами), например, геофонами, помещаемыми на земле или в землю вокруг источника сейсмических сигналов. Данные, зарегистрированные сейсмическими датчиками, анализируют для получения представления о структуре и составе подземных пластов.
На фиг. 1 схематически представлено поперечное сечение земной поверхности и подповерхностной зоны. На поверхности земли 6 показаны сейсмические датчики 2 и источник 4 сейсмических сигналов. В подповерхностной зоне находится ряд слоев, имеющих различный состав. Они иллюстрируются перемежающимися темными полосами 8 и светлыми полосами 10. Сейсмические волны 12, излучаемые источником 4 сейсмических сигналов, частично отражаются и возвращаются к поверхности, где принимаются сейсмическими датчиками 2.
Сейсмические волны, излученные источником 4 сейсмическим сигналов, также распространяются вдоль поверхности или вблизи поверхности в виде прямой волны 12'. В непосредственной близи от поверхности эти пришедшие прямые волны принимаются каждым сейсмическим датчиком 2 до того, как соответствующие датчики примут любые из отраженных волн. Этот первый приход называют "первым вступлением".
При обычной сейсмической съемке, по области поверхности земли над подземным пространства, подлежащим съемке, и вокруг него, размещается большое число сейсмических датчиков. При обычной съемке могут использоваться десятки тысяч сейсмических датчиков, распределенных, например, на площади 100 км2. На фиг. 2 представлен пример размещения датчиков, где множество сейсмических датчиков 2 образует сетчатую структуру. Также показан источник 4 сейсмических сигналов, окруженных сейсмическими датчиками 2. Естественно, в реальности используется много больше сейсмических датчиков 2, чем показанные двадцать датчиков.
Каждый сейсмический датчик имеет чувствительный элемент, способный обнаруживать смещение грунта. Чувствительный элемент вырабатывает выходной сигнал, отражающий это смещение грунта. С регулярными интервалами производится выборка выходного сигнала, например каждую миллисекунду. Эти данные выборки образуют сейсмические данные. Сейсмические данные регистрируются в порядке номеров, или индексов, выборки, нарастающих с каждой повой выборкой. При этом индекс выборки может считаться величиной, показывающей истекшее время.
Интервал между последовательными выборками устанавливается генератором тактовых импульсов в сейсмическом генераторе. В обычной сейсмической съемке номинальная (т.е. заданная) частота выборки в разных датчиках, участвующих в съемке, одинакова (т.е. число выборок в секунду одинаково). Это правило не является обязательным, если номинальные частоты выборки отличаются, сейсмические данные, зарегистрированные одним датчиком, могут быть подвергнуты повторной выборке для обеспечения сравнения зарегистрированных сигналов.
Важно знать точное время регистрации сейсмическим датчиком каждого из этих сигналов выборки относительно момента излучения сейсмического сигнала источником сейсмических сигналов. Это позволяет рассчитать время распространения сейсмического сигнала. На основании времени распространения могут быть определены глубина и положение границы раздела, отразившей сейсмический сигнал.
Обычно эта точность обеспечивается использованием в источнике сейсмических сигналов и сейсмическом датчике высокостабильных тактовых генераторов. От этих генераторов требуется сохранение достаточной стабильности на протяжении выполнения съемки, которая может продолжаться много недель.
Известными способами обеспечения достаточной стабильности тактового генератора сейсмического датчика является использование датчика, тактовый генератор которого может принимать синхронизирующие радиосигналы, например GPS синхронизирующие сигналы (генератор тактовой частоты с синхронизацией от GPS). Однако подобные технические решения повышают стоимость, размеры и вес каждого сейсмического датчика.
Менее стабильные тактовые генераторы обычно страдают от дрейфа периода тактовых сигналов. Дрейф означает, что период сигнала тактового генератора не является строго постоянным. Дрейф может быть вызван как производственными различиями, так и местными факторами, например температурой среды, окружающей сейсмический датчик. Величина дрейфа может меняться со временем, например, при изменении окружающей температуры. Соответственно, такие генераторы тактовых сигналов могут уходить как относительно внешнего сигнала точного времени (т.е. "системного времени", которое может предоставляться высокостабильной системой синхронизации, например, системой синхронизации GPS, упомянутой выше), так и относительно друг друга.
В результате может получиться, что хотя заданные/номинальные частоты выборки различных датчиков одинаковы, фактические частоты выборки могут различаться на небольшую величину. Это может оказывать негативное влияние при обработке сейсмических данных и их использования для построения сейсмического изображения.
Предметом настоящего изобретения является создание способов и систем, обеспечивающих точную синхронизацию при сейсмической съемке, без необходимости использования высокостабильного генератора тактовых сигналов в самом сейсмическом датчике.
Раскрытие изобретения
В соответствии с по меньшей мере одним вариантом выполнения, предлагаются устройства и системы для обеспечения или осуществления функций по выполнению сейсмической съемки.
В изобретении предложен способ, в котором:
принимают данные, относящиеся к выходным сигналам первого и второго сейсмических датчиков, включающим компоненты, соответствующие обнаружению первым и вторым сейсмическими датчиками первого и второго сейсмических сигналов, причем распространение первого сейсмического сигнала направлено от первого сейсмического датчика ко второму сейсмическому датчику, а распространение второго сейсмического сигнала направлено от второго сейсмического датчика к первому сейсмическому датчику;
определяют, относительно первого тактового сигнала в первом сейсмическом датчике, первый момент времени, соответствующий времени прихода первого сейсмического сигнала на первый сейсмический датчик, и второй момент времени, соответствующий времени прихода второго сейсмического сигнала на первый сейсмический датчик;
определяют, относительно второго тактового сигнала во втором сейсмическом датчике, третий момент времени, соответствующий времени прихода первого сейсмического сигнала на второй сейсмический датчик, и четвертый момент времени, соответствующий времени прихода второго сейсмического сигнала на второй сейсмический датчик; и
находят смещение первого тактового сигнала относительно второго тактового сигнала, используя первый, второй, третий и четвертый моменты времени.
Принимаемые данные могут быть соответственно обработаны для определения смещения первого тактового сигнала.
Когда тактовые сигналы в сейсмических датчиках не обладают достаточной стабильностью, время распространения сейсмических сигналов между источником сейсмических сигналов и сейсмическим датчиком неизвестно. Авторы изобретения установили, что используя два сейсмических сигнала, первый из которых распространяется от первого сейсмического датчика ко второму сейсмическому датчику, а второй распространяется от второго сейсмического датчика к первому сейсмическому датчику, можно установить соотношение между тактовыми сигналами в сейсмических датчиках.
Этот способ может включать вычисление среднего значения первого и второго моментов времени и среднего значения третьего и четвертого моментов времени, причем вычисление смещения основано на разнице между вычисленными средними значениями.
Выходные сигналы первого и второго сейсмических датчиков могут также включать компоненты, соответствующие обнаружению первым и вторым сейсмическими датчиками третьего и четвертого сейсмических сигналов, причем распространение третьего сейсмического сигнала направлено от первого сейсмического датчика ко второму сейсмическому датчику, а распространение четвертого сейсмического сигнала направлено от второго сейсмического датчика к первому сейсмическому датчику. Способ также может включать:
определение, относительно первого тактового сигнала в первом сейсмическом датчике, пятого момента времени, соответствующего времени прихода третьего сейсмического сигнала на первый сейсмический датчик, и шестого момента времени, соответствующего времени прихода четвертого сейсмического сигнала на первый сейсмический датчик;
определение, относительно второго тактового сигнала во втором сейсмическом датчике, седьмого момента времени, соответствующего времени прихода третьего сейсмического сигнала на второй сейсмический датчик, и восьмого момента времени, соответствующего времени прихода четвертого сейсмического сигнала на второй сейсмический датчик; и
нахождение поправочного коэффициента для первого тактового сигнала, с использованием первого, второго, третьего, четвертого, пятого, шестого, седьмого и восьмого моментов времени.
Выходные сигналы по меньшей мере одного из первого и второго сейсмических датчиков могут также включать компонент, соответствующий обнаружению упомянутым по меньшей мере одним сейсмическим датчиком повторяющегося сейсмического сигнала. В этом случае, способ также может включать:
определение периода принятого повторяющегося сигнала в выходном сигнале; и
нахождение поправочного коэффициента для тактового сигнала по меньшей мере одного сейсмического датчика, используя найденный период. В данном примере, нахождение поправочного коэффициента может также включать сравнение определенного периода с известным, фактическим периодом излученного повторяющегося сигнала. Соответственно, принятый повторяющийся сигнал получается из излученного повторяющегося сигнала, например, сигнала, излученного сейсмическим источником.
Можно заметить, что в дополнение к вычислению смещения для тактового сигнала, для тактового сигнала сейсмического датчика может быть найден поправочный коэффициент. Смещение и поправочный коэффициент могут быть применены в отношении временных интервалов (интервалов времени), зарегистрированных посредством тактового сигнала этого датчик, для введения этих временных интервалов в системное время.
Можно заметить, что генератор тактового сигнала одного из сейсмических датчиков может быть откалиброван по опорному тактовому сигналу с использованием найденных смещения и поправочного коэффициента. Например, опорным тактовым сигналом может быть высокостабильный тактовый сигнал, например синхронизирующий тактовый сигнал GPS.
Принимаемые данные могут также включать выходной сигнал третьего сейсмического датчика, который установлен коллинеарно с первым и вторым сейсмическими датчиками и имеет третий тактовый сигнал, синхронизированный со вторым тактовым сигналом. Способ также может включать:
определение, относительно третьего тактового сигнала в третьем сейсмическом датчике, два добавочных момента времени, соответствующих временам прихода первого сейсмического сигнала и второго сейсмического сигнала на третий сейсмический датчик; и
нахождение смещения первого тактового сигнала относительно второго и третьего тактовых сигналов, с использованием первого, второго, третьего, четвертого и двух добавочных моментов времени.
В этом варианте выполнения, способ может включать вычисление среднего значения первого и второго моментов времени и среднего значения третьего, четвертого, пятого и шестого моментов времени, причем смещение обусловлено различием между вычисленными средними значениями.
Для повышения точности, для вычисления смещения тактового сигнала первого сейсмического датчика может быть использовано более одного сейсмического датчика (в данном случае, второго и третьего).
При осуществлении способа также могут располагать первый и второй сейсмические датчики на местности (в некоторой области), и обеспечивать излучение первого и второго сейсмических сигналов так, чтобы они принимались сейсмическими датчиками. Каждый сейсмический датчик может иметь генератор тактового сигнала с тем, чтобы моменты времени, связанные с приемом сейсмических сигналов, могли быть зарегистрированы относительно этого тактового сигнала.
Опционально, первый сейсмический сигнал может быть излучен из источника сейсмического сигнала, расположенного рядом (в зоне) с первым сейсмическим датчиком. Опционально, второй сейсмический сигнал может быть излучен из источника сейсмического сигнала, расположенного рядом со вторым сейсмическим датчиком.
В вариантах выполнения, второй сейсмический сигнал излучается из источника сейсмического сигнала, расположенного коллинеарно с первым и вторым сейсмическими датчиками и так, что второй сейсмический датчик располагается между источником сейсмического сигнала и первым сейсмическим датчиком. Кроме того, первый сейсмический сигнал может быть излучен из источника сейсмического сигнала, расположенного коллинеарно с первым и вторым сейсмическими датчиками и так, что второй сейсмический датчик располагается между источником сейсмического сигнала и первым сейсмическим датчиком.
Для обеспечения распространения сейсмических сигналов от одного сейсмического датчика к другому, источники сейсмических сигналов могут быть расположены рядом с сейсмическими датчиками, либо могут быть расположены коллинеарно с сейсмическими датчиками. В вариантах выполнения, источник сейсмических сигналов и сейсмический датчик могут быть расположены рядом, например, могут быть частью одного устройства. Это единое устройство может быть использовано для синхронизации нескольких удаленных сейсмических датчиков.
В соответствии с другой особенностью, предложен способ нахождения поправочного коэффициента для тактового сигнала в сейсмическом датчике, при осуществлении которого:
определяют, относительно тактового сигнала в сейсмическом датчике, временные интервалы, соответствующие периодическому сейсмическому сигналу, воспринимаемому сейсмическим датчиком;
находят, используя определенные временные интервалы, поправочный коэффициент для временных интервалов тактового сигнала.
Для тактового сигнала сейсмического датчика может быть определен поправочный коэффициент с использованием периодического сейсмического сигнала. Этот поправочный коэффициент относится к изменениям в скорости нарастания данного тактового сигнала, часто называемым дрейфом тактового сигнала. Наличие возможности коррекции дрейфа позволит точно определять временную привязку момента прихода сейсмических сигналов, принятых сейсмическим датчиком, в течение длительного периода.
Определенные временные интервалы могут соответствовать некоторой фазе периодического сейсмического сигнала за несколько периодов периодического сейсмического сигнала, и поправочный коэффициент определяется на основании различий этих временных интервалов.
Например, могут быть определены временные интервалы, соответствующие пиковым значения или максимумам в периодическом сейсмическом сигнале. Период периодического сейсмического сигнала соответствовал бы различию временных интервалов между соседними пиками, и соответственно мог бы быть определен и поправочный коэффициент. Для получения более точного сейсмического сигнала, временные интервалы или различия во временных интервалах могут быть усреднены за несколько периодов.
Способ может включать:
определение величин сейсмического сигнала, соответствующих найденным временным интервалам, причем величины сейсмического сигнала соответствуют периодическому сейсмическому сигналу, принятому сейсмическим датчиком; и
вычисление по меньшей мере одного скалярного произведения величин этого сейсмического сигнала и сейсмического сигнала известного периода, причем поправочный коэффициент вычисляется на основании этого скалярного произведения.
Альтернативным способом определения поправочного коэффициента для временных интервалов является вычисление скалярного произведения принятого сейсмического сигнала с сейсмическими сигналами с известным периодом. Скалярное произведение будет максимальным, когда два сейсмических сигнала находятся в фазе. Затем период известного сейсмического сигнала может быть использован для определения поправочного коэффициента.
Периодическим сейсмическим сигналом может быть непрерывный монохроматический сигнал, например синусоидальный сейсмический сигнал, либо это может последовательность дискретных сигналов, излучаемых с фиксированными интервалами. Фиксированные интервалы подразумевают, что время излучения известно, например, благодаря сохранению точного времени излучения в запоминающем устройстве. Интервал может быть постоянным.
В данном способе, может быть принята сейсмограмма, зарегистрированная по меньшей мере одним сейсмическим датчиком, и поправочный коэффициент для тактового сигнала в этом сейсмическом датчике может быть использован для корректировки временного интервала, измеренного по этому тактовому сигналу. Сейсмограмма может содержать зарегистрированные сигналы, соответствующие периодическому сейсмическому сигналу, и зарегистрированные сигналы, соответствующие множеству излученных сигналов при сейсморазведке. Для определенности, под излученными сигналами при сейсморазведке понимается излучение, используемое для зондирования подповерхностной зоны. При этом корректировка временной привязки сейсмограммы выполняется только после получения сейсмических данных. При этом не производится коррекции фактического времени. При выполнении разведки этот способ может представлять собой простой и быстрый процесс без дополнительной нагрузки на обработку данных или перенос ее в полевые условия во время проведения съемки.
Может быть определено несколько поправочных коэффициентов, один из них - для выбранной секции сейсмограммы. Например, поправочный коэффициент может быть определен для каждой пары последовательных временных интервалов. В альтернативном варианте, поправочный коэффициент может быть определен для каждой из серий временных промежутков, например каждых 20, 30 или 40 минут зарегистрированных данных (длина временного промежутка будет зависеть от ожидаемой степени дрейфа тактового сигнала).
Способ также может включать шаг приема данных смещения, соответствующих исходному смещению (OFF) между тактовым сигналом в каждом сейсмическом "датчике и системным временем, причем это исходное смещение и поправочный коэффициент используются для коррекции момента времени, измеренного по этому тактовому сигналу.
В случае периодического сигнала в виде непрерывного монохроматического сигнала, поправочный коэффициент может быть использован для коррекции момента времени, измеренного по упомянутому тактовому сигналу, путем коррекции серии последовательных временных промежутков, из которых первый начинается в момент времени τ0, где τ0 представляет собой момент времени, измеренный посредством тактового сигнала, в котором известно исходное смещение, и путем вычисления поправочного коэффициента а для каждого временного промежутка, с использованием уравнения:

где lt представляет известный период периодического сигнала, а lτ представляет период измеренного сигнала. Временной промежуток может быть выбран так, чтобы на этом промежутке не происходило существенного изменения дрейфа. Таким путем может быть выполнена коррекция промежутков по накопленному результату.
В случае если периодическим сигналом является множество дискретных сигналов, поправочный коэффициент может быть использован для коррекции момента времени, измеренного посредством тактового сигнала, согласно уравнению:
tm=tpn+Apn⋅(τm-τpn)
где:
tm представляет системное время, соответствующее моменту τm времени, измеренному по тактовому сигналу,
Apn представляет поправочный коэффициент для n-го периода и может быть вычислено с использованием уравнения:

где lt представляет периодичность множества дискретных сигналов;
τp(n+1) является измеренным по тактовому сигналу моментом прихода на датчик (n+1)-го дискретного сигнала; и
τpn является измеренным по тактовому сигналу моментом прихода на датчик n-го дискретного сигнала; и
tpn представляет системное время, соответствующие моменту прихода на сейсмический датчик дискретного сигнала, предваряющего τm, которое может быть вычислено с использованием выражения: tpn=tp1+[(n-1)⋅lt],
где: tpl является системным временем, соответствующим моменту прихода первого дискретного сигнала по истечению времени, для которого известно исходное смещение.
В соответствии с другой особенностью, способ может включать:
определение, относительно первого тактового сигнала в первом сейсмическом датчике, первого момента времени, связанного со временем прихода первого сейсмического сигнала на первый сейсмический датчик, и второго момента времени, связанного с временем прихода второго сейсмического сигнала на первый сейсмический датчик;
определение, относительно второго тактового сигнала во втором сейсмическом датчике, третьего момента времени, связанного с временем прихода первого сейсмического сигнала на второй сейсмический датчик, и четвертого момента времени, связанного с временем прихода второго сейсмического сигнала на второй сейсмический датчик,
причем первый сейсмический сигнал распространялся в направлении от первого сейсмического датчика ко второму сейсмическому датчику, а второй сейсмический сигнал распространялся в направлении от второго сейсмического датчика к первому сейсмическому датчику; и
вычисление смещения первого тактового сигнала относительно второго тактового сигнала, с использованием первого, второго, третьего и четвертого моментов времени.
В изобретении предложены способы, позволяющие использовать в сейсмических датчиках тактовые сигналы с низкой стабильностью. Предложенные в изобретении способы позволяют калибровать внутренние генераторы тактовых сигналов в сейсмических датчиках по опорному времени ("системному времени"). Когда источник сейсмических сигналов имеет внутренний генератор тактовых сигналов, откалиброванный относительно системного времени, имеется возможность точного определения времени распространения сейсмической волны от источника к соответствующим датчикам.
Обычно системным временем является время, соответствующее стабильному тактовому сигналу, например сигналу, синхронизированному от GPS.
Калибровка внутреннего генератора тактового сигнала сейсмического датчика по системному времени может, в частности, выполняться путем использования источника сейсмических сигналов со стабильным внутренним генератором тактовых сигналов.
Благодаря этому, число дорогих генераторов, синхронизированных с GPS, требующихся для выполнения широкомасштабной сейсмической разведки, сводится к минимуму, поскольку большинство или все сейсмические приемники, используемые для разведки, могут иметь более дешевые, менее стабильные генераторы тактовых сигналов.
Другие признаки и преимущества изобретения будут понятны из приведенного далее описания предпочтительных вариантов выполнения, используемых в качестве частных примеров, представленных со ссылкой на приложенные чертежи.
Краткое описание чертежей
Далее, в качестве частных примеров, приводится описание вариантов выполнения систем, устройств и способов со ссылкой на приложенные чертежи, на которых:
на фиг. 1 схематично представлено поперечное сечение поверхности и подповерхностной зоны земли;
на фиг. 2 представлен схематичный вид системы сейсмической разведки;
на фиг. 3 представлен схематичный вид системы сейсмической разведки в соответствии с вариантом выполнения;
на фиг. 4 представлена временная диаграмма для системы, показанной на фиг. 3;
на фиг. 5 представлен схематичный вид системы сейсмической разведки в соответствии с другим вариантом выполнения;
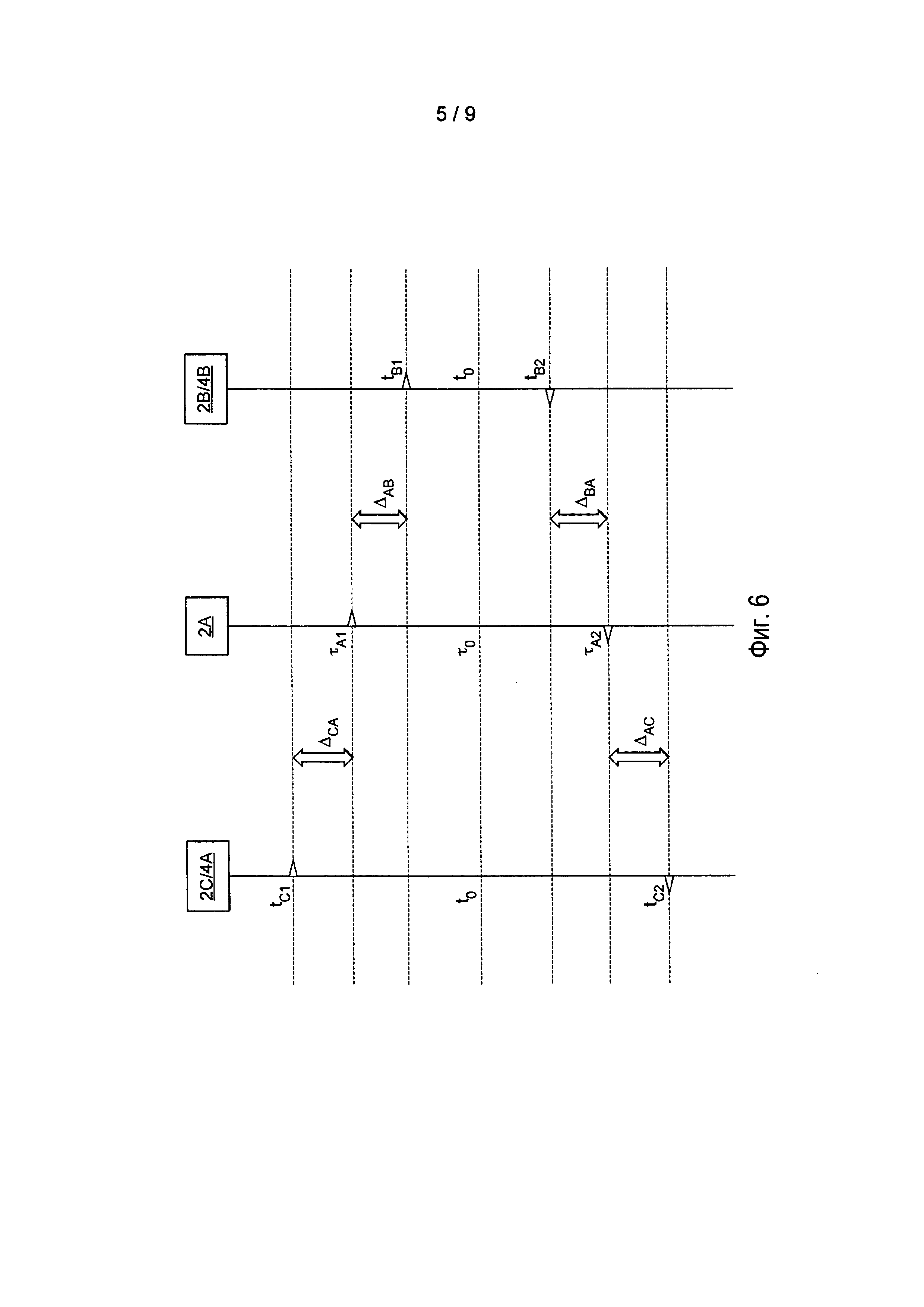
на фиг. 6 представлена временная диаграмма для системы, показанной на фиг. 5;
на фиг. 7 представлен схематичный вид системы сейсмической разведки в соответствии с другим вариантом выполнения;
на фиг. 8 представлен схематический чертеж варианта выполнения изобретения;
на фиг. 9 представлен, в основном, способ в соответствии с вариантами выполнения; и
на фиг. 10 схематично представлено компьютеризированное устройство для использования в вариантах выполнения.
Несколько частей и компонентов изображены более чем в одном чертеже. Для ясности изложения для обозначения одинаковых частей и компонентов на всех фигурах будут использоваться одинаковые номера ссылок.
Подробное описание осуществления изобретения
В приведенном далее описании, выражение "синхронизация первого тактового сигнала со вторым тактовым сигналом" используется, чтобы показать, что временной интервал первого тактового сигнала был согласован с (т.е. одинаков с) временным интервалом второго тактового сигнала. Термин "калибровка первого тактового сигнала относительно второго тактового сигнала" говорит о том, что известно, как наложить временной интервал первого тактового сигнала на временной интервал второго тактового сигнала, например, применяя поправочный коэффициент для временного интервала первого тактового сигнала: фактический временной интервал первого тактового сигнала не изменяется для согласования его с со вторым тактовым сигналом. Следует понимать, что синхронизация первого тактового сигнала со вторым тактовым сигналом может быть осуществлена после калибровки путем применения поправочного коэффициента и изменения временного интервала первого тактового сигнала.
Как уже упоминалось, способы, предложенные в изобретении, позволяют использовать в датчиках аппаратуры сейсмической разведки дешевые генераторы тактовых сигналов. Согласно первой особенности, выполняется калибровка генераторов тактовых сигналов в датчиках по системному времени. Другими словами, определяется соотношение каждого тактового сигнала с системным временем. Системным временем обычно является время, соответствующее стабильному тактовому сигналу, например, синхронизирующему сигналу GPS. Хотя такой процесс калибровки включает некоторые физические действия, выполняемые в полевых условиях и/или во время сейсмической разведки, фактически калибровка обычно выполняется отдельно, после того как датчики были собраны и сейсмические данные загружены. При этом если сейсмические данные передаются от датчиков на аппаратуру обработки в реальном времени, калибровка могла бы начинаться, когда датчики все еще собирают данные на месте проведения разведки.
Способы калибровки генераторов тактовых импульсов по системному времени более подробно будут рассмотрены ниже.
Благодаря калибровке генераторов тактовых сигналов в каждом датчике относительно системного времени, становится известным временное соотношение сейсмических данных, зарегистрированных одним датчиком, относительно сейсмических данных, зарегистрированных другими датчиками, что важно для обработки сейсмических данных в целом и формирования сейсмического изображения. В соответствии с предложенными в изобретении способами, это соотношение, предпочтительно, устанавливается на начальной стадии процесса получения сейсмических данных. Однако если дрейф тактовых сигналов происходит с непостоянной скоростью, что вполне вероятно, это соотношение нарушается, и использование прежнего соотношения приводит к ошибкам.
Поэтому желательно учитывать этот непрерывный дрейф посредством периодической перекалибровки генераторов тактовых сигналов. Частота такой повторной калибровки может зависеть от возможной, или ожидаемой, степени дрейфа: чем больше степень дрейфа, тем чаще следует повторять процесс калибровки.
Далее приводится подробное описание процесса калибровки. Процесс калибровки включает (а) специальное физическое расположение одного источника сейсмических сигналов и двух сейсмических датчиков, (в) излучение двух противоположных сейсмических сигналов (более подробно описано ниже), которые принимаются сейсмическими датчиками, и (с) специальные шаги по обработке данных для калибровки генератора тактовых сигналов в одном из датчиков относительно генератора тактовых сигналов в другом датчике.
Согласно фиг. 3, в области проведения съемки располагают несколько сейсмических датчиков 2. Два из сейсмических датчиков (а именно, 2А и 2В) будут упоминаться в связи с фиг. 4. Коллинеарно с сейсмическими датчиками 2А и 2В располагаются источники 4А и 4В сейсмических сигналов. В данном случае под коллинеарностью понимается такое расположение сейсмических датчиков и источников сейсмических сигналов, что на виде сверху они располагаются на линии, насколько это возможно, приближающейся к прямой линии. Поскольку поверхность Земли не является плоской, благодаря разности высот и кривизне Земли, понятно, что сейсмические датчики и источники сейсмических сигналов могут и не быть расположены буквально на одной линии, а скорее будут помещаться в одной вертикальной плоскости на поверхности Земли или под ней.
Каждый сейсмический датчик имеет генератор тактовых сигналов. Сейсмический датчик 2А имеет первый генератор тактовых сигналов, временной интервал которого обозначается как τ, а сейсмический датчик 2В имеет второй генератор тактовых сигналов, временной интервал которого обозначается как t. Один из генераторов тактовых сигналов, например, входящий в сейсмический датчик 2В, связан с системным временем. Эта связь может обеспечиваться, например, оснащением генератора GPS приемником с тем, чтобы генератор тактовых сигналов представлял системное время. В другом варианте, генератор тактовых сигналов мог бы быть предварительно откалиброван по системному времени с использованием описанного здесь способа и затем дополнительно синхронизирован с системным временем.
Источник 4А сейсмического сигнала излучает первый сейсмический сигнал, а источник 4В сейсмического сигнала излучает второй сейсмический сигнал. Оба сейсмических сигнала воспринимаются сейсмическими датчиками 2А и 2В. Сейсмические датчики 2А и 2В регистрируют временные интервалы относительно тактового сигнала соответствующего сейсмического датчика, которые характеризуют время прихода (ТоА - от англ. time of arrival) сейсмического сигнала на сейсмический датчик. Естественно, каждый датчик будет обнаруживать первое вступление, а также по меньшей мере одну отраженную волну. В данном варианте выполнения, рассмотрение определения ТоА сейсмического сигнала будет относиться к обнаружению прихода на датчик первого вступления. Далее, если, в частности, сигнал, излучаемый источником сейсмического сигнала, представляет собой свип-сигнал, а не короткий импульс, последующая обработка данных может включать взаимную корреляцию излученного сигнала с зарегистрированным сигналом для обеспечения сжатия волнового пакета и определения ТоА сигнала на сейсмический датчик.
Благодаря коллинеарному расположению сейсмических датчиков 2А и 2В и источников 4А и 4В сейсмических сигналов, сигнал, излучаемый источником 4А и принятый датчиком 2В, распространяется в основном по тому же пути вдоль/через землю, что и сигнал, излученный источником 4В и принятый датчиком 2А, но направление распространения двух сейсмических сигналов противоположно. Это соответствует значению термина "противоположные сейсмические сигналы". Соответственно, время распространения между датчиком 2А и датчиком 2В волны, излученной источником 4А, равно времени распространения между датчиком 2В и датчиком 2А волны, излученной источником 4В, при условии, что функция Грина Земли неизменна.
На фиг. 4 показана временная диаграмма для описанной выше системы. Как было показано выше, значение тактового сигнала в сейсмическом датчике 2А обозначается как τ, а значение тактового сигнала в сейсмическом датчике 2В обозначается как t. Кроме того, тактовый сигнал в сейсмическом датчике 2В связан известным образом с системным временем. Для обозначения величин тактовых сигналов в некоторые моменты в системном времени будут использоваться индексы, т.е. τn относится к времени согласно тактовому сигналу в датчике 2А в системное время n, a tn относится к времени согласно тактовому сигналу в датчику 2В в системное время n.
Как показано на фиг. 4, сигнал, излученный источником 4А, принимается датчиком 2А в момент времени τA1. Сигнал проходит через землю и принимается датчиком 2В в момент времени tB1. Аналогично, сигнал, излученный источником 4В, принимается датчиками 2В и 2А в моменты времени tB2 и τA2, соответственно. Время распространения сигнала от датчика 2А до датчика 2В составляет ΔAB. Время распространения сигнала от датчика 2В до датчика 2А, составляющее ΔВА, равно ΔAB (если измерять его в системном времени).
Два сейсмических сигнала, излученные источниками 4А и 4В, излучаются в относительно быстрой последовательности так, что любой дрейф тактового сигнала в датчике 2А может считаться постоянным.
Соотношение между двумя тактовыми сигналами в датчиках 2А и 2В может быть определено как:

где:
‘а’ представляет поправочный коэффициент, обусловленный как конструктивными отличиями в скорости приращения, так и дрейфом, причем дрейф может быть принят постоянным;
tn представляет время в соответствии с тактовым сигналом в датчике 2В в момент n времени по GPS;
τn представляет время в соответствии с тактовым сигналом в датчике 2А в момент n времени по GPS;
t0 представляет время в соответствии с тактовым сигналом в датчике 2В в "нулевое время" по GPS;
τ0 представляет время в соответствии с тактовым сигналом в датчике 2А в "нулевое время" по GPS.
"Нулевое время" представляет собой системное время в момент, когда значения тактовых сигналов в датчиках 2А и 2В оба известны (подробно рассмотрено ниже).
t0 может быть задано посередине между tB1 и tB2, т.е.:

Поскольку предполагается, что дрейф тактового сигнала в датчике 2А постоянен, и что функция Грина Земли не изменяется за промежуток времени, в течение которого излучаются сигналы из источников 4А и 4В, τ0 может быть определено посередине между τA1 и τB1, то есть:

Различие в величине между t0 и τ0 представляет собой смещение ("OFF") между тактовыми сигналами датчиков 2А и 2В в момент "нулевого времени". Другими словами, это величина, которую нужно добавить к времени, измеренному по тактовому сигналу в датчике 2А, для наложения этого тактового сигнала на тактовый сигнал в датчике 2В в момент нулевого времени. Должно быть понятно, что смещение может иметь как положительное значение, так и отрицательное.
Поскольку t0 уже откалибровано или синхронизировано с системным временем, смещение может быть использовано для наложения значения τ0 датчика 2А на системное время.
Из сказанного понятно, что рассматривая сейсмические данные, зарегистрированные датчиками 2А и 2В, и определяя ТоА сигналов, излученных источниками 4А и 4В (т.е. определяя τA1, τA2, и tB1 tB2), возможно наложить временной интервал тактового сигнала в датчике 2А на временной интервал в датчике 2В и, тем самым, на системное время в момент "нулевого времени".
Можно определить, как временной интервал тактового сигнала в датчике 2А накладывается на временной интервал тактового сигнала в датчике 2В (и, тем самым, на системное время) в другие моменты времени. Для этого подставляют уравнения (2) и (3) в уравнение (1) и, после группировки, получают:

При известном поправочном коэффициенте "а", можно наложить любой временной интервал τn, соответствующий тактовому сигналу в датчике 2А, на время tn, соответствующее тактовому сигналу в датчике 2В (и, соответственно, системному времени). Для определения поправочного коэффициента "а", излучается вторая пара противоположных сейсмических сигналов, например, источниками 4А и 4В сейсмических сигналов. Второй сигнал, излученный источником 4А, принимается датчиком 2А с временным интервалом τA3, и датчиком 2В с временным интервалом tB3. Второй сигнал, излученный источником 4В, принимается датчиком 2В с временным интервалом tB4, и датчиком 2А с временным интервалом τA4.
После группировки уравнения (1) получаем:

Таким же образом, как t0 и τ0 определены выше как "нулевое время" для первой пары противоположных сейсмических возбуждений, t1 и τ1 могут быть определены как "нулевое время" для второй пары противоположных сейсмических возбуждений:


Рассматривая t1 как tn, и τ1 как τn, и подставляя уравнения (2) и (3), и (6) и (7) в (5), получаем:

Приведенное рассмотрение позволяет выполнять калибровку генератора тактового сигнала в датчике 2А по тактовому сигналу в датчике 2В (а значит, и по системному времени) для любой точки в сейсмических данных, в предположении постоянства дрейфа. Было, однако, установлено, что дрейф тактовых сигналов происходит с непостоянной скоростью. В изобретении используется излучение еще одной пары противоположных сейсмических сигналов (т.е. третьей пары сигналов), например, по одному излучению от каждого источника 4А и 4В сейсмических сигналов в последующий момент времени. Описанный выше процесс может быть повторен так, чтобы определить поправочный коэффициент, соответствующий временному периоду между второй и третьей парами излучений. Процесс повторной калибровки может быть проведен с частотой, выбранной соответственно скорости изменения дрейфа в генераторе тактовых сигналов в датчике 2А.
Как было упомянуто выше, генератор тактовых импульсов в датчике 2В калибруется или синхронизируется с системным временем, например, сигналами времени GPS. Если генератор тактовых сигналов в датчике 2В сам не синхронизирован с GPS (т.е., если он страдает от дрейфа), тогда потребуется повторная калибровка (и, опционально, повторная синхронизация) этого генератора тактовых сигналов для того, чтобы повторная калибровки генератора тактовых сигналов в датчике 2А имела смысл.
Описанные выше способы могут быть использованы для проведения сейсмической разведки. При проведении разведки, размещение источников сейсмических сигналов и управление ими выполняется так, чтобы излучались пары противоположных сейсмических сигналов, которые затем регистрируются разными датчиками, размещенными в районе разведки. Например, используются два источника (например, автопередвижные вибросейсмические установки), расположенные так, что находятся по концам линии датчиков ("приемная линия"). Сейсмический датчик пространственно совмещен с первым из источников (либо они образуют единый узел, содержащий источник и датчик, либо за счет расположения датчика вблизи источника), и оснащен генератором тактовых сигналов, синхронизированным с сигналами времени GPS. Каждый из этих двух источников излучает сигнал в соответствии с приведенным выше описанием. Распространение этих двух сигналов обнаруживается датчиком, связанным с первым источником, а также каждым из датчиков на приемной линии.
Если требуется только определить смещение, необходимое для наложения тактовых сигналов в каждом датчике на приемной линии на тактовые сигналы в датчике, связанном с первым источником (т.е. время GPS) в момент "нулевого времени", то больше никаких физических шагов не требуется.
Если же требуется определить соотношение между тактовыми сигналами в датчиках на приемной линии и тактовым сигналом в датчике, связанным с первым источником, тогда каждый из двух источников излучает дополнительный сигнал, распространение которого определяется датчиком, связанным с первым источником, а также каждым из датчиков в приемной линии.
Если имеется вероятность дрейфа с непостоянной скоростью каждого из тактовых сигналов в приемной линии, тогда источники будут использованы для излучения через некоторое время третьей пары противоположных сейсмических сигналов. Это может произойти через несколько часов, или через день или более, в зависимости от возможной скорости изменения дрейфа. Этот шаг повторной калибровки может повторяться столько раз, сколько необходимо, в течение проведения сейсмической разведки.
Для сейсмических источников нет необходимости оставаться в одной позиции между первым, вторым и последующим излучениями пар сигналов Действительно, источники могут быть передвинуты в новые позиции во время этих периодов для излучения пар противоположных сейсмических сигналов для использования их при калибровке генераторов тактовых сигналов в других расположенных поблизости приемных линиях.
Для обеспечения калибровки других источников, используемых в разведке, они могут быть передвинуты на противоположные концы другой приемной линии, например, вблизи первой линии, и процесс может быть повторен. В альтернативном варианте, источники или разные пары источников могут быть перемещены на противоположные концы второй приемной линии, расположенной под углом, например, перпендикулярно, к первой приемной линии, при условии, что один из приемников в этой второй приемной линии также является частью первой приемной линии. В этом случае, ни один из источников не должен быть связан с датчиком, имеющим стабильный генератор тактового сигнала. Вместо этого датчик, являющийся частью первой приемной линии, играет роль датчика с известным временем, поскольку отношение тактового сигнала этого датчика может быть определено при дальнейшей обработке и затем использовано в качестве стабильного тактового сигнала для второй приемной линии. Одна, две или более пар противоположных сейсмических сигналов, в зависимости от потребности, излучаются для второй приемной линии.
Используются источники сейсмических сигналов или дополнительные пары источников сейсмических сигналов, и излучаются пары противоположных сейсмических сигналов, пока все датчики в зоне разведки не становятся частью приемной линии, в соответствии с предложенными в настоящем изобретении способами.
После завершения сейсмической разведки, датчики снимают и загружают сейсмические данные с каждого датчика. Зарегистрированные каждым датчиком данные анализируются в соответствии с описанными выше способами, для выявления соотношения между периодом его тактовых сигналов и периодом сигналов GPS. Например, первый датчик в первой приемной линии может быть рассмотрен в связи с датчиком, связанным с первым источником. Смещение, необходимое для наложения времени тактового сигнала в этом первом датчике на время GPS датчика, связанного с источником, в момент "нулевого времени", может быть определено с использованием уравнений (2) и (3), приведенных выше.
Если во время процесса съемки была излучена вторая пара противоположных сейсмических сигналов, то может быть вычислен поправочный коэффициент а, согласно уравнению (8).
Если были излучены третья и последующие пары противоположных сейсмических сигналов, то могут быть подвергнуты повторной калибровке генераторы тактовых сигналов в рассматриваемом датчике. Это может быть осуществлено либо путем определения смещения и поправочного коэффициента опять с использованием второй и третьей, или третьей и четвертой и т.д., пар противоположных сейсмических сигналов, либо корректировкой времени в рассматриваемом генераторе тактовых сигналов с использованием первого поправочного коэффициента для первого периода и второго поправочного коэффициента для второго периода и т.д. Этому способу, однако, присущи некоторые ошибки.
Далее приводится описание альтернативных вариантов изобретения.
В качестве варианта вычисления поправочного коэффициента а, альтернативного описанному выше, возможно определить поправочный коэффициент путем излучения дополнительного сейсмического сигнала с одной стороны приемной линии, например, источником 4А. Другими словами, первый сейсмический сигнал излучается с одной стороны приемной линии, например, от источника 4А, как это было описано выше со ссылкой на фиг. 3. Второй сейсмический сигнал излучается с противоположной стороны приемной линии, например, источником 4В. Третий сейсмический сигнал излучается с первой стороны приемной линии, т.е., источником 4А. Первый и второй сейсмические сигналы могут быть использованы для определения смещения, требующегося для наложения периода тактового сигнала в датчика 2А на тактовый сигнал в датчике 2В в момент "нулевого времени", как это было описано выше. Третий сейсмический сигнал может быть затем использован для вычисления поправочного коэффициента, как это описано ниже. Этот поправочный коэффициент может быть далее использован в уравнении (4) для обеспечения наложения периода тактового сигнала в датчике 2А на период тактового сигнала в датчике 2В в другие моменты времени.
Для определения поправочного коэффициента таким способом, определяют промежуток времени, соответствующий тактовому сигналу в датчике 2А между приемом первого сейсмического сигнала и третьего сейсмического сигнала. Также определяют промежуток времени, соответствующий тактовому сигналу в датчике 2В между приемом первого сейсмического сигнала и третьего сейсмического сигнала. Отношение между этими временными периодами и является поправочным коэффициентом а.
В другом примере, со ссылкой на фиг. 5 и 6, показаны несколько сейсмических датчиков, расположенных в рассматриваемой зоне. Со ссылкой на фиг. 6, рассматриваются сейсмические датчики 2А, 2В и 2С. Два источника 4А и 4В сейсмических сигналов расположены коллинеарно с сейсмическим датчиком 2А, который расположен между двумя источниками сейсмических сигналов.
Источники 4А и 4В сейсмических сигналов в данном варианте выполнения также включают сейсмические датчики 2С и 2В, соответственно. Совмещенные сейсмические датчики и источники сейсмических сигналов могут быть сформированы в виде единых устройств, либо могут быть просто соединены. В целом можно сказать, что источники сейсмических сигналов расположены в одном месте с соответствующими сейсмическими датчиками.
Каждый из сейсмических датчиков 2А, 2В и 2С имеет генератор тактовых сигналов. Также, как и в приведенном выше описании, сейсмический датчик 2А будет иметь первый генератор тактовых сигналов, временной интервал которого обозначен как τ, однако сейсмические датчики 2В и 2С будут иметь генераторы тактовых сигналов, вместе называемые вторыми генераторами тактовых сигналов, которые синхронизированы друг с другом и поэтому имеют одинаковый временной интервал, обозначенный как t. Эти вторые генераторы тактовых сигналов могут быть синхронизированы с системным временем. Как и ранее, это может быть случай, когда данные калибровки для генераторов тактовых импульсов в 2В и 2С уже были определены, и когда временной интервал, относящийся к одному или обоим из генераторов тактовых сигналов, представляет временной интервал, преобразованный посредством эквивалента уравнения 1, приведенного выше.
Источник 4А сейсмических сигналов излучает первый сейсмический сигнал, а источник 4В сейсмических сигналов излучает второй сейсмический сигнал. Оба сейсмических сигнала принимаются сейсмическими датчиками 2А, 2В и 2С. Момент излучения первого сейсмического сигнала совпадает с ТоА первого сейсмического сигнала на сейсмический датчик 2С, и обозначается как tC1. Тогда ТоА первого сейсмического сигнала на сейсмический датчик 2А составляет τA1, а ТоА первого сейсмического сигнала на сейсмический датчик 2В составляет tB1. Аналогично, момент излучения второго сейсмического сигнала совпадает с ТоА второго сейсмического сигнала на сейсмический датчик 2В и обозначается как tB2. ТоА для второго сейсмического сигнала на сейсмический датчик 2А составляет τA2, а на сейсмический датчик 2С, соответственно tC2.
Приведенное выше уравнение 3 дает величину τ0:

Кроме того, приведенное ранее уравнение 2 дает две величины для t0. На сейсмическом датчике 2С:

и на сейсмическом датчике 2В:

Уравнения 10 и 11 могут быть усреднены для получения более точной величины t0. Подстановка средней величины в уравнение 1 и перегруппировка дает:

Таким образом, два сейсмических датчика 2В и 2С могут быть использованы для получения более точной калибровки генератора тактовых сигналов в сейсмическом датчике 2А. Это может быть особенно полезно, когда сейсмический датчик, который должен быть откалиброван, в данном примере сейсмический датчик 2А, расположен между другими сейсмическими датчиками 2В и 2С, поскольку могут быть учтены, по меньшей мере, частично, любые изменения во времени распространения сейсмического сигнала.
Выше описаны способы, относящиеся к калибровке первого генератора тактовых сигналов посредством одного или более вторых генераторов тактовых импульсов. Должно быть понятно, что могут быть использованы различные комбинации описанных вариантов выполнения. Например, в первом варианте выполнения, показанном на фиг. 3 и 4, любой из сейсмических датчиков 2А и 2В, или оба, могут располагаться в одном месте с сейсмическим источником. Аналогично, в варианте, показанном на фиг. 5 и 6, один или оба сейсмических датчика 2В и 2С могут не быть расположены вместе с сейсмическими датчиками 4В и 4а, соответственно. В последнем случае, сейсмические датчики и источники сейсмических сигналов по-прежнему могут быть расположены коллинеарно.
В некоторых вариантах выполнения, данный сейсмический датчик может быть откалиброван с использованием более чем двух сейсмических сигналов, и с любым числом других сейсмических датчиков. На фиг. 7 показано, как может работать такой вариант выполнения.
На фиг. 7 показаны несколько пар сейсмических датчиков, имеющих различное расположение так, что по меньшей мере один сейсмический датчик коллинеарен с источниками сейсмического сигнала. Источники 4А и 4В сейсмических сигналов коллинеарны с сейсмическим датчиком 2D и четырьмя сейсмическими датчиками, имеющими обозначение 2Е. Источники 4С и 4D сейсмических сигналов коллинеарны с сейсмическим датчиком 2D и тремя сейсмическими датчиками, имеющими обозначение 2F. Источники 4Е и 4F сейсмических сигналов коллинеарны с сейсмическим датчиком 2D и тремя сейсмическими датчиками, имеющими обозначение 2G. Это может быть достигнуто путем использования более двух сейсмических датчиков, либо перемещением пары источников сейсмических сигналов между излучениями сейсмических сигналов.
При использовании источников 4А и 4В сейсмических сигналов, все сейсмические датчики 2Е могут быть откалиброваны относительно сейсмического датчика 2D. Аналогично, источники 4С и 4D сейсмических сигналов могут быть использованы для калибровки сейсмических датчиков 2F, а источники 4Е и 4F сейсмических сигналов могут быть использованы для калибровки сейсмических датчиков 2G. Сейсмический датчик 2D может быть оснащен стабильным генератором тактовых сигналов, откалиброванным или синхронизированным по системному времени.
В составе большой решетки сейсмических датчиков, относительно небольшое число сейсмических датчиков может быть оснащено стабильными генераторами сейсмического сигнала, благодаря чему эти сейсмические датчики могут быть использованы для калибровки относительно большого числа окружающих их сейсмических датчиков.
В других вариантах выполнения, сейсмический датчик 2D может и не иметь стабильного генератора тактовых сигналов. Вместо этого, каждый из источников 4A-4F может иметь сейсмические датчики (как и в варианте выполнения, описанном выше со ссылкой на фиг. 5 и 6). Они могут быть в дальнейшем использованы для многократной калибровки генератора тактового сигнала в сейсмическом датчике 2D, например, с выполнением усреднения. Использование многократной калибровки обеспечивает более точную калибровку сейсмического датчика 2D по сравнению с однократной калибровкой. В дальнейшем сейсмический датчик 2D может быть использован для калибровки окружающих сейсмических датчиков.
Далее описываются другие особенности настоящего изобретения.
Согласно одной из других особенностей, корректировка временного дрейфа генератора тактового сигнала в датчике 2А может иметь непрерывный характер. В данном случае, первый шаг состоит в установлении исходного смещения тактового сигнала в датчике 2А относительно системного времени. Это может быть, в частности, осуществлено способом, описанным выше со ссылкой на фиг. 3-6, т.е. может быть установлено, как временной интервал τ0 тактового сигнала в датчике 2А может быть наложен на временной интервал t0 тактового сигнала в датчике 2В, когда генератор тактовых сигналов в датчике 2В откалиброван или синхронизирован с системным временем.
Данная особенность включает излучение повторяющегося сейсмического сигнала по всей географической области сейсмической разведки. Этот повторяющийся сигнал регистрируется в виде метки времени в сейсмических данных каждого сейсмического датчика. Затем эта метка времени может быть идентифицирована на дальнейшем этапе обработки данных для обеспечения коррекции дрейфа в процессе обработки данных.
В соответствии с вариантом выполнения, источник сейсмического сигнала ("источник сигналов времени"), расположенный в области проведения сейсмической разведки, излучает повторяющийся сигнал. Повторяющимся сигналом может быть дискретный сигнал, например, импульс или свип-сигнал, повторяющийся с известной и, обычно, постоянной периодичностью в течение съемки. В альтернативном варианте, повторяющимся сигналом может быть непрерывный сигнал, например, монохроматический сигнал, например синусоидальный сигнал, излучаемый непрерывно в течение съемки. Источник сигналов времени может быть приспособлен для излучения своего повторяющегося сигнала, начиная с момента времени непосредственно перед установкой на месте съемки первого сейсмического датчика. При этом, как только датчик установлен и включен, он регистрирует повторяющийся сигнал.
Хотя время распространения дискретного сигнала от источника сигналов времени до любого данного сейсмического датчика неизвестно, это время распространения постоянно в течение всей съемки (при условии, что функция Грина Земли остается неизменной).
Аналогично, для непрерывного синусоидального сигнала, время между специфическими повторяющимися точками на синусоидальном сигнале (например, пиковые значения колебаний) постоянно в течение всей съемки.
Когда сейсмическая съемка закончена, датчики собираются из зоны проведения съемки, и производится загрузка данных. В альтернативном варианте, данные могут быть переданы в реальном масштабе времени на блок сбора данных, в процессе проведения съемки.
При анализе сейсмических данных, зарегистрированных датчиком, для идентификации повторяющегося сигнала, можно определить наличие дрейфа тактового сигнала в этом датчике и ввести поправку на этот дрейф.
Один вариант выполнения с использованием этого способа показан на фиг. 8, где изображен источник 4S сейсмического сигнала, излучающий дискретный сигнал р. Источник 4S имеет генератор тактового сигнала, синхронизированный с GPS, благодаря чему интервалы излучения поддерживаются с высокой точностью с заданным периодом lt. Например, каждые 30 минут может излучаться сейсмический свип-сигнал, имеющий, например, 10-секундную продолжительность. Источник 4S излучает каждый сигнал с одного и того же места, чем гарантируется постоянство времени распространения до каждого датчика 2 при каждом повторении.
Распространяющийся дискретный сигнал, зарегистрированный датчиком 2А, может быть идентифицирован за счет взаимной корреляции излученного сейсмического свип-сигнала с зарегистрированными данными для определения времени прихода (ТоА) дискретного сигнала на датчик (τp1, τp2, τp3 и т.д.).
Как уже упоминалось, смещение между тактовым сигналом в датчике 2А и системным временем (например, временем GPS) уже было установлено, например, описанным выше способом. Соответственно, отношение между периодом lt и разницей во времени между временами прихода последовательных дискретных сигналов (т.е., Δτ1, Δτ2 и т.д.) может быть использовано для определения соотношения между временем тактового сигнала в датчике 2А и системным временем.
Периодичность излучения дискретных сигналов выбирается так, чтобы возможный уровень дрейфа между двумя последовательными дискретными сигналами оставался низким. Дрейф в генераторе тактового сигнала в датчике 2А между моментом, когда было определено смещение (т.е., τ0 в описанном выше способе определения смещения), и ТоА первого дискретного сигнала после τ0, может считаться равным нулю. На фиг. 8 первым дискретным сигналом, зарегистрированным после τ0, является τp1⋅τp1 может быть наложен на системное время, t в соответствии с выражением:
tp1=τp1-OFF,
где:
tp1 - системное время, соответствующее τp1;
τp1 представляет ToA первого дискретного сигнала после момента, когда было определено смещение; и
OFF представляет смещение между тактовым сигналом в датчике и системным временем (т.е. тактовым сигналом в источнике). В случае, когда смещение определено с использованием способа, описанного выше, и когда тактовый сигнал в датчике 2В был синхронизирован с системным временем:

Как только было определено системное время, соответствующее τp1, может быть введена поправка на дрейф, возникающий в остальной части сейсмических данных. Известно, что разница между последовательными сигналами синхронизации есть периодичность lt, которая известна заранее. Поэтому системное время tpn, соответствующее ТоА n-го дискретного сигнала, принятого датчиком, равно:

Для выявления соотношения между тактовым сигналом в датчике и системным временем для моментов времени между n-м и (n+1)-м дискретными сигналами, может быть определен поправочный коэффициент Apn для n-го периода, посредством выражения:

При этом системное время tm, соответствующее любому времени τm, измеренному по тактовому сигналу датчика, может быть определено как:

где "pn" соответствует последнему дискретному сигналу, зарегистрированному перед τm.
В альтернативном варианте, вместо предположения об отсутствии дрейфа между τ0 и τp1 может быть получено потенциально более точное значение для tp1 путем вычисления поправочного коэффициента А для периода времени между τp1 и τp(-1), где τр(-1) есть ТоА последнего дискретного сигнала, зарегистрированного датчиком перед τ0. Следует понимать, что дискретные сигналы регистрируются перед τ0, поскольку излучение дискретного сигнала заканчивается перед тем, как датчики развернуты/включены.
В другом альтернативном варианте, источник сигналов времени не обязательно должен оставаться в одном месте в зоне проведения разведки на протяжении всей съемки. Источник сигналов времени может, вместо этого, перемещаться по зоне съемки по мере выполнения съемки. В этом случае, источник сейсмических сигналов, принимающий участие сейсмической разведке, может быть использован для выполнения второй функции излучения дискретного сигнала. Например, источник может излучать дискретные сигналы из одного и того же места, в то время как датчики размещаются в поле съемки. Когда размещение источников закончено, источник может начать перемещение по зоне съемки, излучая сигналы для осуществления процесса съемки.
При приближении к моменту излучения следующего дискретного сигнала, источник может переместиться назад к одному из пунктов возбуждения, из которого он уже излучал возбуждающий сигнал. Под пунктом возбуждения понимается место, в котором источник излучает энергию сейсмического возбуждения, т.е. сейсмический сигнал для сейсмической съемки. Это место не совпадает с местом излучения предыдущих сейсмических сигналов. Поскольку источник уже излучил сигнал из этого пункта возбуждения в момент времени, который был точно зарегистрирован для задач сейсмической съемки, второе возбуждение, излученное из этого же пункта, может быть использовано по аналогии с описанным выше способом. с тем чтобы обеспечить наложение нестабильных тактовых сигналов датчиков на системное время.
В этом примере, а также и в примере, описанном выше, промежуток времени между последовательными дискретными сигналами не обязательно должен быть постоянным, при условии, что по меньшей мере два сигнала излучены из любого данного пункта и точные моменты времени этих излучений известны.
Дополнительно к этому, в случае очень больших географических областей, может быть использовано более одной системы синхронизации с тем, чтобы гарантировать прием дискретного сигнала всеми датчиками в области. Дискретный сигнал, излученный различными источниками сигналов времени, может быть различным, например, разные свип-сигналы, что позволяет различить соответствующие дискретные сигналы при обработке.
В вариантах выполнения, где используется непрерывный монохроматический сигнал, например синусоидальный сигнал, этот сигнал излучается стационарным источником. Длина периода сигнала является известной константой, и поэтому поправочный коэффициент может быть определен путем сравнения длины периода сигнала, измеренной датчиком, и известной длины периода.
В вариантах выполнения, опционально, для выделения монохроматического сигнала, зарегистрированного датчиком, может применяться узкополосный режекторный фильтр. Ширина полосы режекторного фильтра может выбираться так, чтобы перекрывать ожидаемое искажение в регистрируемом сигнале, вызванное дрейфом тактового сигнала. Режекторный фильтр может и не потребоваться, если способы (описаны ниже) определения частоты зарегистрированного сигнала синхронизации достаточно эффективны. Однако использование режекторного фильтра может быть предпочтительно, если сигнал синхронизации слаб или относительно велик фоновый шум, например, вследствие сейсмической активности.
Для определения длины периода колебаний, измеренной датчиком, специалистам известен ряд способов, позволяющих определить частоту сигнала. Эта найденная частота затем может быть сопоставлена с известной частотой излученного сигнала синхронизации.
Например, может быть вычислено скалярное произведение измеренного колебания в выбранный промежуток времени и образцового колебания с известной продолжительностью периода. Образцовое колебание, дающее максимальное значение скалярного произведения, имеет период, длина которого наиболее близка длине периода колебания, измеренного датчиком, и поэтому может считаться измеренной длиной периода, которая используется для определения поправочного коэффициента а.
В альтернативном варианте, сравнение излученного сигнала и зарегистрированного сигнала может быть выполнено применением функции депланации, например, используемой при динамической трансформации временной шкалы или оптическом деформировании изображения, для определения того, как излученный сигнал изменился из-за дрейфа тактового сигнала. Это изменение может быть использовано для определения длины периода зарегистрированного сигнала.
В другом альтернативном варианте, для определения спектральных компонентов в зарегистрированном сигнале может быть использовано преобразование Фурье с тем, чтобы определить, насколько изменилась частота. Соответственно, затем может быть определена длина периода зарегистрированных данных.
В другой опции, может быть использовано преобразование Гилберта, хорошо известный линейный оператор, для анализа сигнала, измеренного датчиком в какое-либо время, для определения мгновенной частоты измеренного сигнала. Определенную таким образом частоту можно сравнить с известной частотой излученного сигнала.
Поправочный коэффициент а может быть определен выражением:

где


Системное время, соответствующее любому моменту времени, измеренному по тактовому сигналу в датчике 2, может быть определено, начиная от точки, в которой было обнаружено смещение, применением поправочного коэффициента к моменту времени, зарегистрированному по тактовому сигналу в датчике. Если возможно изменение дрейфа во времени, зарегистрированные данные могут быть разделены на дискретные секции, и поправочный коэффициент может быть вычислен для каждой дискретной секции так, что время может быть скорректировано с накопленным итогом.
Используя описанные способы, поодиночке или в комбинации, возможно откалибровать первый тактовый сигнал в сейсмическом датчике посредством второго тактового сигнала, при этом не требуется, чтобы первый генератор тактового сигнала был высокостабильным тактовым генератором, например, генератором, синхронизированным с GPS.
Способ калибровки генератора тактовых сигналов в сейсмическом датчике будет описан в общих чертах со ссылкой на фиг. 9. На первом шаге 21 принимают данные, зарегистрированные сейсмическими датчиками. На втором шаге 22 определяют значения моментов времени относительно первого тактового сигнала для первого и второго сигналов. Это могут быть значения ТоА для первого и второго сигналов, описанные выше. На шаге 23, определяют значения моментов времени относительно одного или более вторых тактовых сигналов для первого и второго сигналов. Может присутствовать только единственный второй генератор тактовых сигналов, как показано на фиг. 4, либо несколько вторых генераторов тактовых сигналов, как на фиг. 6. На шаге 24, на основе найденных значений моментов времени находят смещение первого тактового сигнала. Это может быть выполнено усреднением значений моментов времени относительно первого тактового сигнала и усреднением значений моментов времени относительно одного или более вторых тактовых сигналов, и вычислением разности этих значений.
После определения смещения на шаге 24, может быть определен поправочный коэффициент либо на шагах 25 и 26, либо на шагах 27 и 28 (или в их комбинации).
На шаге 25 повторяются описанные выше шаги 22-24 для третьего и четвертого сигнала. Эти шаги впоследствии могут быть использованы для определения смещения для первого тактового сигнала. На основе двух значений смещения может быть определен поправочный коэффициент с использованием, например уравнения 8, приведенного выше.
В качестве альтернативы, или дополнительно, на шаге 27 в принятых данных определяется сигнал синхронизации. Этот периодический сигнал может быть использован на шаге 28 для определения поправочного коэффициента.
Описанные способы могут быть реализованы подходящей компьютерной системой. Далее, со ссылкой на фиг. 10, приводится описание блок-схемы, иллюстрирующей такую компьютерную систему 50. Компьютерная система 50 содержит систему 52 обработки, имеющую процессор, или ЦП, 54, соединенный с энергозависимой памятью (т.е. ОЗУ) 56 и энергонезависимой памятью (например, жестким диском или съемной памятью, например диском или флэш-накопителем) 58. Программные компоненты 60, содержащие команды для осуществления вариантов выполнения изобретения, могут храниться в энергонезависимой памяти 58 и/или энергозависимой памяти 56. Кроме того, ЦП 54 может быть соединен с интерфейсом 62 пользователя и сетевым интерфейсом 64. Сетевым интерфейсом 64 может быть проводной или беспроводной интерфейс, соединенный с сетью, представленной облаком 66. Таким образом, система 52 обработки может быть соединена с сейсмическими датчиками, базами данных и другими источниками сейсмических сигналов и приемниками данных посредством сети 66.
В процессе работы процессор 54 извлекает и исполняет хранящиеся программные компоненты 60, например, из энергонезависимой памяти 58. При выполнении программных компонентов 60 (т.е. при выполнении компьютерной системой описанных выше действий) процессор может временно хранить данные в энергозависимой памяти 56. Процессор 54 также может принимать через интерфейс 62 пользователя или сетевой интерфейс 64 данные, необходимые для реализации вариантов выполнения изобретения. В некоторых вариантах выполнения, может использоваться поисковая система для поиска данных в сейсмических датчиках, присоединенная к компьютерной системе 50 через интерфейс 64.
Компьютерная система 50 также может быть использована для дешифровки любых данных сейсмической разведки, полученных любыми способами сейсмической разведки, известными в уровне техники. В альтернативном случае, компьютерная система может выдать выходной сигнал либо через интерфейс 62 пользователя, либо через сетевой интерфейс 64, который может быть использован другими системами для осуществления способов съемки.
Другие детали частных вариантов выполнения
В приведенных выше вариантах выполнения, предполагается, что поправочный коэффициент а является постоянной величиной. В более общем случае, поправочный коэффициент может изменяться во времени. При этом используется более общий вариант уравнения 1, имеющий вид:

где a(t) представляет величину а как функцию времени.
Для определения этой функции, могут периодически определяться значения а, между которыми интерполируется функция a(t).
Следует понимать, что любой признак, описанный применительно к любому варианту выполнения, может быть использован поодиночке, или в комбинации с другими описанными признаками, а также может быть использован в комбинации с одним или более признаками любого другого из вариантов выполнения, либо любой комбинации любых других вариантов выполнения. Кроме того, также могут быть использованы эквиваленты и модификации, не описанные выше, в пределах области притязаний изобретения, определенной в приложенной формуле. Например, приведенное выше описание относилось к наземной сейсмической разведке. Однако данная методология непосредственно применима к морской сейсмической разведке, где сейсмические датчики расположены на морском дне или под ним, и где источники сейсмического сигнала расположены на морском дне, или на морской поверхности или вблизи нее. Признаки изобретения могут образовывать комбинации, отличающиеся от комбинаций, определенных в формуле изобретения.
Реферат
Изобретение относится к области геофизики и может быть использовано при проведении сейсморазведочных мероприятий. В заявке описан способ, в котором принимают данные, относящиеся к выходным сигналам первого и второго сейсмических датчиков, включающим компоненты, соответствующие обнаружению первым и вторым сейсмическими датчиками первого и второго сейсмических сигналов. Причем распространение первого сейсмического сигнала направлено от первого сейсмического датчика ко второму сейсмическому датчику, а распространение второго сейсмического сигнала направлено от второго сейсмического датчика к первому сейсмическому датчику. Определяют, относительно первого тактового сигнала в первом сейсмическом датчике, первый момент времени, соответствующий времени прихода первого сейсмического сигнала на первый сейсмический датчик, и второй момент времени, соответствующий времени прихода второго сейсмического сигнала на первый сейсмический датчик. Определяют, относительно второго тактового сигнала во втором сейсмическом датчике, третий момент времени, соответствующий времени прихода первого сейсмического сигнала на второй сейсмический датчик, и четвертый момент времени, соответствующий времени прихода второго сейсмического сигнала на второй сейсмический датчик. Находят смещение первого тактового сигнала относительно второго тактового сигнала, используя первый, второй, третий и четвертый моменты времени. Технический результат - повышение точности и информативности получаемых данных. 3 н. и 17 з.п. ф-лы, 10 ил.
Формула




Комментарии