Способ и система оценки, относящиеся к ускорению - RU2545189C2
Код документа: RU2545189C2
Чертежи





Описание
Область техники
Настоящее изобретение относится к способу и системе для оценки характеристики ускорения водителя согласно независимым пунктам.
Предшествующий уровень техники
Контраварийное вождение является часто тождественным топливосберегающему вождению. Оно также способствует поддержанию хорошего транспортного потока, большему комфорту для любых перевозимых пассажиров и безопасной перевозке любого перевозимого груза. Что напрямую вносит вклад как в комфорт, так и в безопасность - это то, как человек, ведущий транспортное средство осуществляет ускорение. Ускорение может быть как продольным, т.е. в направлении передвижения транспортного средства, так и боковым, т.е. в боковом направлении транспортного средства. Ускорение транспортного средства может, конечно, также быть комбинацией продольного и бокового ускорения.
Большие боковые ускорения могут не только быть причиной дискомфорта пассажиров и риска падения, но также представляют угрозу безопасности вследствие неуправляемого перемещения незакрепленных объектов. В ситуации грузового автомобиля большие боковые ускорения могут приводить к сдвигу или наклону груза и, тем самым, способствовать повреждению. В наихудшем случае большое боковое ускорение также может быть причиной дорожной аварии. Низкое боковое ускорение также помогает уменьшать износ шин.
US 2008/0015754 описывает систему, выполненную с возможностью автоматической компенсации внезапных изменений в боковом ускорении транспортного средства. Боковое ускорение оценивается, пока транспортное средство находится в движении, и, если оно превосходит предварительно определенное значение, генерируется сигнал управления, выполненный с возможностью противодействия неблагоприятной боковой силе.
US 2009/0248240 описывает систему, которая измеряет боковое ускорение транспортного средства и передает информацию водителю. Он/она затем может решать, уменьшать ли, поддерживать или увеличивать скорость транспортного средства, чтобы иметь возможность настолько быстро, насколько возможно, приводить ее в управляемое состояние. Система, например, используется, чтобы тренировать водителей гоночных автомобилей. Информация также может сохраняться для последующего анализа.
US 2009/0319129 описывает способ содействия водителю во время вождения. Способ вычисляет максимальное допустимое боковое ускорение транспортного средства и рекомендует продольную скорость водителю на основе этого значения.
Задача изобретения состоит в том, чтобы улучшать характеристику ускорения водителя и, в частности, чтобы побуждать его/ее улучшать его/ее характеристику ускорения.
Сущность изобретения
Задача, описанная выше, достигается посредством способа оценки для оценивания характеристики ускорения водителя транспортного средства. Способ содержит определение ускорения a транспортного средства, вычисление одного или более пороговых значений для ускорения транспортного средства, которые зависят от, по меньшей мере, одного характерного для ситуации параметра, сравнение ускорения a транспортного средства с упомянутыми одним или более пороговыми значениями и генерирование на основе сравнения классифицирующего сигнала, относящегося к упомянутым вычисленным одному или более пороговым значениям.
Согласно другому аспекту задача достигается посредством системы оценки для оценивания о характеристики ускорения водителя транспортного средства. Система содержит, по меньшей мере, один блок датчика, выполненный с возможностью доставки сигнала ускорения, который показывает ускорение a транспортного средства, и блок вычисления, выполненный с возможностью для приема упомянутого сигнала ускорения, вычисления одного или более пороговых значений для ускорения транспортного средства, которые зависят от, по меньшей мере, одного характерного для ситуации параметра, сравнения ускорения a транспортного средства с упомянутыми одним или более пороговыми значениями и генерирования на основе сравнения классифицирующего сигнала, относящегося к упомянутым вычисленным одному или более пороговым значениям.
Система дополнительно содержит блок вывода, выполненный с возможностью предоставления информации от классифицирующего сигнала водителю. Классифицирующий сигнал может согласно варианту осуществления посылаться во внешний блок для представления информации, например, владельцу транспортного средства.
Способ и система в конструктивном ключе побуждают водителя адаптировать скорость транспортного средства в течение заданного времени к поворотам или участкам дороги с круговым движением. Тогда может повышаться комфорт для любых перевозимых пассажиров наряду с тем, что в то же время риск повреждения любого груза может уменьшаться. Способ и система также помогают уменьшать износ шин и других компонентов транспортного средства, что может приводить к меньшему времени, которое необходимо для технического обслуживания, и, следовательно, большему времени, в течение которого транспортное средство может использоваться. Уменьшение износа также уменьшает воздействие на окружающую среду в том, что части транспортного средства нуждаются в замене менее часто.
Характеристика ускорения водителя при ускорении оценивается посредством классифицирования по шкале, которая зависит от ситуации, в которой транспортное средство находится. Ситуация транспортного средства поэтому находится под наблюдением, и характеристика ускорения водителя оценивается в ответ на нее.
Ускорение транспортного средства может разделяться на боковое ускорение и продольное ускорение. В случае бокового ускорения проблема содержит согласно варианту осуществления два случая: один из них является временным "пиковым отклонением" в боковом ускорении вследствие быстрого перемещения рулевого колеса на повороте, также называемый "рывок", и другой является непрерывным большим боковым ускорением вследствие выполнения поворота на слишком высокой скорости. В случае продольного ускорения проблемой согласно одному варианту осуществления является слишком высокое ускорение, связанное с некоторой скоростью.
Оценка характеристики ускорения водителя может быть частью набора категорий для оценки его/ее характеристики вождения.
Предпочтительные варианты осуществления описываются в зависимых пунктах формулы изобретения и подробном описании.
Краткое описание прилагаемых чертежей
Изобретение описывается ниже со ссылкой на прилагаемые чертежи, на которых:
фиг.1 изображает систему оценки согласно одному варианту осуществления изобретения.
Фиг.2 является блок-схемой последовательности этапов способа оценки согласно одному варианту осуществления изобретения.
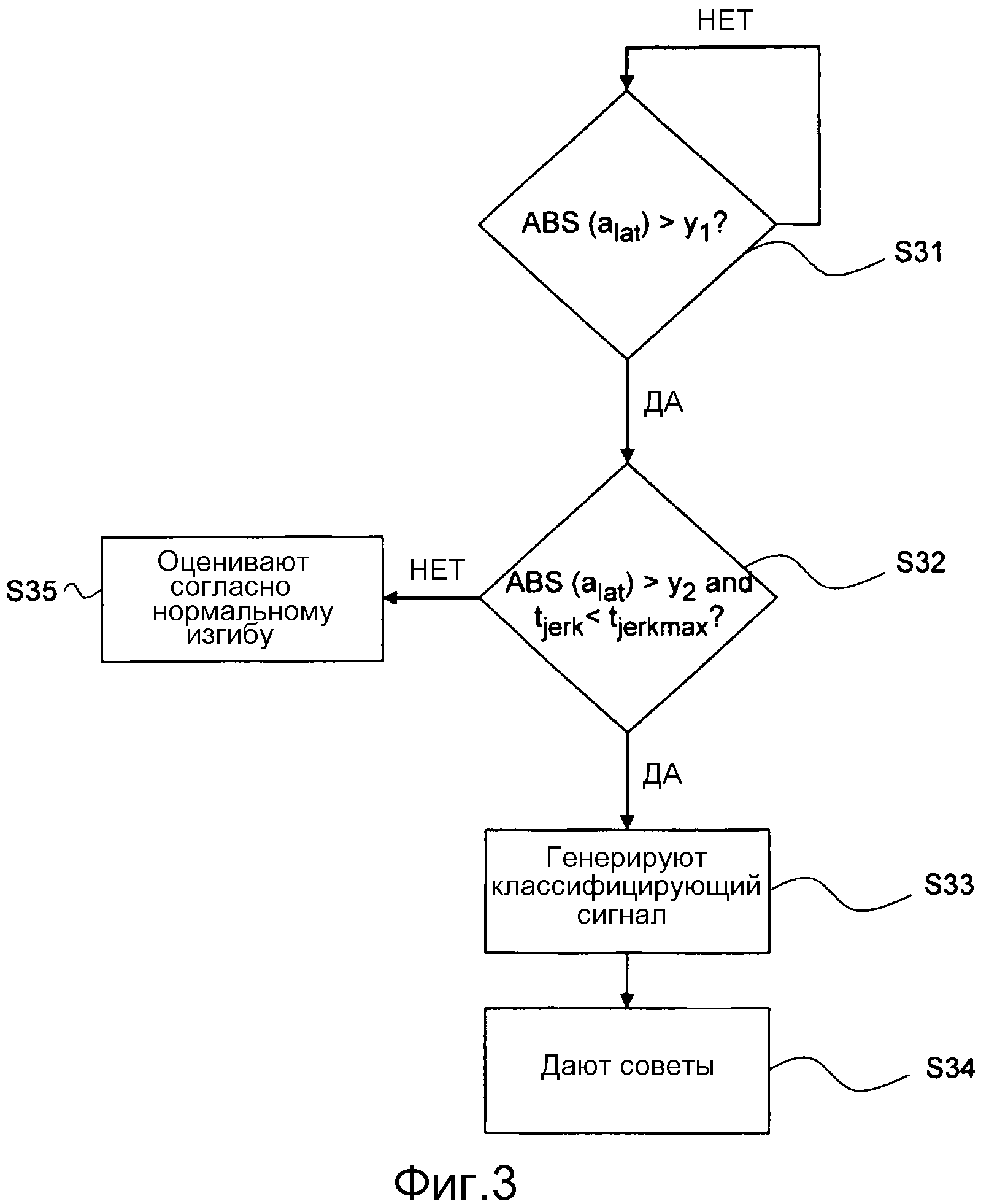
Фиг.3 является блок-схемой последовательности этапов способа оценки согласно другому варианту осуществления изобретения.
Фиг.4 является диаграммой, иллюстрирующей пример того, как быстрое перемещение рулевого колеса на повороте может оказывать влияние на боковое ускорение транспортного средства (кривая A) и каким боковое ускорение может быть в случаях, когда транспортное средство выполняет поворот на слишком высокой скорости (кривая B).
Фиг.5 иллюстрирует в форме диаграммы пример максимального и среднего бокового ускорения транспортного средства на повороте.
Фиг.6 является блок-схемой последовательности этапов способа оценки согласно дополнительному варианту осуществления изобретения.
Фиг.7 иллюстрирует то, как пороговые значения для оценки продольного ускорения транспортного средства определяются согласно одному варианту осуществления изобретения.
Фиг.8 изображает примеры допустимых опорных значений ускорения для оценки поведения водителя при ускорении в случае продольного ускорения.
Описание предпочтительных вариантов осуществления изобретения
Фиг.1 изображает систему оценки согласно изобретению, которая теперь будет поясняться со ссылкой на изобретение. Система содержит, по меньшей мере, один блок 1... n датчика, выполненный с возможностью доставки сигнала ускорения, который показывает ускорение a транспортного средства. Блок датчика может, например, быть акселерометром, который измеряет ускорение транспортного средства, или блоком, который измеряет различие в скорости вращения колес между сторонами транспортного средства и затем вычисляет боковое ускорение транспортного средства. Система дополнительно содержит блок вычисления, выполненный с возможностью приема упомянутого сигнала ускорения. Блок вычисления дополнительно выполнен с возможностью вычисления одного или более пороговых значений для ускорения транспортного средства, которые зависят, по меньшей мере, от характерного для ситуации параметра, сравнения ускорения транспортного средства с упомянутыми одним или более пороговыми значениями и генерирования классифицирующего сигнала на основе этого сравнения. Классифицирующий сигнал относится к упомянутым вычисленным одному или более пороговым значениям.
Система содержит согласно одному варианту осуществления блок вывода, выполненный с возможностью представления водителю информации от классифицирующего сигнала. Классифицирующий сигнал может согласно другому варианту осуществления посылаться посредством телематического блока в транспортном средстве во внешнее устройство для представления информации из классифицирующего сигнала, например, владельцу транспортного средства. Водитель может затем впоследствии обеспечиваться информацией о его/ее характеристике ускорения, например, посредством отчета.
Блок вычисления содержит предпочтительно блок процессора, выполненный с возможностью осуществления вычислений, сравнений и т.д., и одну или более памяти. Блок вывода может, например, быть дисплеем на приборной панели в транспортном средстве или аудиоблоком, который передает указания, обратную связь и/или классифицирование в форме речевых сообщений.
Фиг.2 является блок-схемой для способа согласно одному варианту осуществления изобретения и содержит первый этап S21, на котором определяют ускорение a транспортного средства. Второй этап S22, на котором вычисляют одно или более пороговые значения для ускорения транспортного средства, которые зависят, по меньшей мере, от одного характерного для ситуации параметра. Пороговые значения предпочтительно показывают пределы, в которых движение на повороте рассматривается как безопасное и комфортное или продольное ускорение как безопасное и комфортное. Согласно одному варианту осуществления, характерный для ситуации параметр является любым из: скорости транспортного средства, ускорения транспортного средства, радиуса кривизны дороги или угла дуги дороги. Скорость транспортного средства является параметром, который является обычно доступным посредством внутренней сети связи транспортного средства, и может приниматься в блоке вычисления в форме сигнала скорости. Радиус кривизны дороги может быть получен посредством блока вычисления, имеющего доступ к картографическим данным, относящимся к маршруту транспортного средства, и информации о местоположении транспортного средства, которые могут получаться посредством блока позиционирования в транспортном средстве, например, посредством GPS (глобальной системы навигации). Это делает возможным выяснять радиус кривизны заранее. Альтернативно радиус кривизны может определяться в то время, как транспортное средство проходит, или после того, как оно прошло поворот по, например, выравниванию колес во время поворота. Угол дуги или угол края дороги может, например, определяться посредством измерения величины потраченного времени или пройденного расстояния транспортным средством на повороте, т.е. времени или расстояния, в течение которого блок 1…n датчика транспортного средства доставляет сигнал ускорения, который показывает боковое ускорение. Если боковое ускорение нулевое, транспортное средство передвигается прямо вперед.
Упомянутое пороговое значение или значения поэтому вычисляются на основе ситуации, в которой находится транспортное средство. Метод того, как они изменяются, зависит от одного или более характерных для ситуации параметров, например пороговые значения при скорости транспортного средства 50 км/ч могут быть отличными от пороговых значений при 70 км/ч.
На этапе S23 затем сравнивают ускорение a транспортного средства с упомянутыми одним или более пороговыми значениями, затем следует этап S24, на котором генерируют классифицирующий сигнал на основе этого сравнения и поэтому относящийся к упомянутым вычисленным одному или более пороговым значениям. Классифицирующий сигнал поэтому приспосабливает себя к пороговым значениям, определенным для конкретной ситуации, и, следовательно, к пределам, которые вытекают из этой ситуации.
Согласно одному варианту осуществления информация из классифицирующего сигнала представляется водителю посредством, например, блока вывода. Классифицирующий сигнал может вместо этого или в дополнение посылаться во внешний блок для представления информации, например, владельцу транспортного средства. Представленная информация может, например, быть в форме цифры на шкале от 1 до 10, на которой 1 не является хорошим поведением при ускорении и 10 является очень хорошим поведением при ускорении для ситуации. Другой пример того, как может выражаться классифицирование, имеет форму некоторого количества символов, например звездочек, в этом случае количество символов, которые загораются, зависит от классифицирующего сигнала. Если только один символ загорается, это показывает менее хорошее поведение при ускорении, и если загораются все из символов, это показывает хорошее поведение при ускорении. Водитель, таким образом, получает непрерывную обратную связь о том, как хорошо он/она ускорялись в ситуации, и мотивируется для улучшения его/ее результатов. Согласно варианту осуществления информация в классифицирующих сигналах накапливается и сохраняется в памяти, например, в блоке вычисления, чтобы обеспечивать возможность анализировать ее впоследствии. Информация также может посылаться в центральный блок, расположенный вне транспортного средства для дополнительного анализа и последующей обработки. Согласно одному варианту осуществления способ содержит при генерировании классифицирующего сигнала обеспечение обратной связи для водителя посредством блока вывода о том, как он/она может улучшить его/ее характеристику ускорения, или для признания его/ее характеристики ускорения. Блок вычисления тогда выполнен с возможностью, например, генерирования посредством блока вывода текстового сообщения, относящегося к информации от классифицирующего сигнала. В случае низкого классифицирования водитель может принуждаться "уменьшать скорость перед поворотом", или в случае высокого классифицирования он/она может получить признание посредством, например, "Хорошее движение на повороте!". Блок вычисления согласно одному варианту осуществления выполнен с возможностью учета того, тормозит ли водитель или ускоряется на повороте, ускоряется или тормозит перед поворотом и т.д. в случаях, где должна быть обратная связь для водителя.
Согласно одному варианту осуществления упомянутое ускорение является боковым ускорением alat транспортного средства. Боковое ускорение возникает главным образом, когда транспортное средство осуществляет движение на повороте. Проблема относительно бокового ускорения содержит главным образом два случая, 1 и 2. Случай 1 является временным "пиковым отклонением" в боковом ускорении, вызванном быстрым перемещением рулевого колеса. Это может, например, быть вследствие того, что водитель не осознал, что приближался поворот, и, следовательно, должен был быстро поворачивать рулевое колесо, чтобы избежать выезда с дороги или на неверную полосу. Случай 2 является непрерывно большим боковым ускорением вследствие выполнения поворота на слишком высокой скорости.
Оценка движения на повороте включает в себя согласно варианту осуществления удовлетворение, по меньшей мере, одного ситуационного критерия. Если, по меньшей мере, один ситуационный критерий удовлетворяется, в таком случае блок вычисления выполнен с возможностью позволять оценивать боковое ускорение транспортного средства. Согласно варианту осуществления упомянутый ситуационный критерий является любым из: наименьшей скорости транспортного средства, наименьшего ускорения, наибольшего радиуса кривизны или наименьшего угла дуги. Таким образом, возможно гарантировать, что повороты с очень незначительными изгибами не оцениваются, и также, что водитель осуществляет вождение в нормальных условиях движения. Наименьшая скорость транспортного средства влечет за собой передвижение транспортного средства при скорости, большей некоторой скорости, например 20 км/ч, перед и после поворота, для осуществления оценки поведения водителя при ускорении на повороте. Наибольший радиус кривизны влечет за собой согласно варианту осуществления то, что радиус находится ниже значения, которое зависит от скорости транспортного средства перед поворотом. Подходящие значения появляются, например, в рекомендациях строительства магистралей шведского государственного дорожного администрирования (публикация VV 2004:80), которые устанавливают пределы, так что радиус кривизны находится ниже того, что классифицируется от "менее хороший" до "хороший". Наименьший угол дуги влечет за собой согласно варианту осуществления, что угол дуги превосходит значение, которое зависит от скорости транспортного средства. Например, высокие значения устанавливаются для угла дуги для низких скоростей (около 70 градусов), чтобы оценивать только повороты, а не незначительную кривизну. При высоких скоростях это значение может быть очень низким или даже нулевым. Это ограничение поэтому используется в основном как фильтр, чтобы пренебрегать незначительной кривизной в городской среде.
Мы теперь переходим к объяснению того, как случай 1 и случай 2, описанные выше, могут быть детектированы и оценены.
Случай 1
Согласно одному варианту осуществления блок вычисления выполнен с возможностью определения абсолютной величины для alat в течение предварительно определенного периода времени tmaxjerk и сравнения этого значения с пороговым значением y2 и генерирования классифицирующего сигнала на основе этого сравнения. Фиг.3 иллюстрирует способ принятия решения, осуществляет ли водитель быстрое перемещение рулевого колеса, и кривая A на диаграмме на фиг.4 иллюстрирует то, как быстрое перемещение рулевого колеса на повороте может оказывать влияние на боковое ускорение транспортного средства. Кривая B иллюстрирует возможный шаблон бокового ускорения, когда скорость, при которой транспортное средство выполняет поворот, является слишком высокой. Согласно фиг.3 абсолютная величина для alat сравнивается с пороговым значением y1 ускорения на этапе S31, и если |alat| больше, чем y1, то характеристика ускорения водителя должна оцениваться. Ситуационный критерий здесь состоит в том, чтобы достигалось наименьшее ускорение. Пороговое значение y1 (и также y2) может здесь зависеть от, например, скорости транспортного средства, радиуса кривизны, угла дуги и т.д. Если, например, транспортное средство перемещается на высокой скорости, y1 является более низким значением, чем когда оно перемещается при более низкой скорости. Если |alat| больше, чем y1, способ переходит далее на этап S32 и |alat| затем сравнивается с дополнительным пороговым значением y2 ускорения. Блок вычисления выполнен с возможностью измерения периода времени, в течение которого |alat| превосходит y2, причем периода, указываемого как tjerk. Если |alat| больше, чем y2, и tjerk является более коротким, чем предварительно определенный период tmaxjerk, на этапе S33 на основе сравнения генерируется классифицирующий сигнал, который показывает низкое классифицирование. Тогда рассматривается, что водитель по некоторой причине должен был сделать большой поворот, т.е. большое перемещение рулевого колеса. Например, на этапе S34 водителю будет отображаться указание посредством блока вывода, чтобы побуждать его/ее выполнять следующий поворот более мягко. Если какое-либо или оба из условий на этапе S32 не выполняются, поведение водителя при ускорении оценивается согласно критериям оценки для упомянутого случая 2 относительно бокового ускорения, как показывается посредством этапа S35. Результатом является метод детектирования того, делает ли водитель быстрое перемещение рулевого колеса, и оценки его/ее последующей характеристики ускорения.
Согласно другому варианту осуществления блок вычисления выполнен с возможностью вычисления производной ∂ンalat/∂ンdt для бокового ускорения alat транспортного средства и определения абсолютного значения для производной, сравнения этого значения с одним или более пороговыми значениями и генерирования классифицирующего сигнала на основе этого сравнения. Высокое значение производной, таким образом, означает большой рывок. Результатом является другой метод детектирования того, делает ли водитель быстрое перемещение рулевого колеса, и оценки его/ее последующей характеристики ускорения.
Согласно дополнительному варианту осуществления блок вычисления выполнен с возможностью определения абсолютной величины для максимального бокового ускорения alat_max транспортного средства и среднего бокового ускорения alat_mean в течение периода времени t и определения, является ли различие между |alat_max| и |alat_mean| большим, чем пороговое значение, и генерирования классифицирующего сигнала на основе этого сравнения. Этот вариант осуществления иллюстрируется на диаграмме фиг.5, которая показывает абсолютную величину максимального и среднего бокового ускорения транспортного средства в течение периода от t1 до t2. Это различие между |alat_max| и |alat_mean| иллюстрируется как adiff, и, если оно больше, чем пороговое значение, генерируется классифицирующий сигнал, который показывает поворот с рывком. Результатом является дополнительный метод детектирования того, делает ли водитель быстрое перемещение рулевого колеса, и оценки его/ее последующей характеристики ускорения.
Высокая скорость транспортного средства приводит к меньшему допустимому отклонению для рывка и ускорения, так что пороговые значения в вышеописанных ситуациях зависят предпочтительно от характерного для ситуации параметра скорости транспортного средства.
Случай 2
Чтобы оценивать, вел ли водитель слишком быстро на повороте, блок вычисления согласно одному варианту осуществления выполнен с возможностью определения максимального бокового ускорения alat_max транспортного средства и сравнения его с двумя пороговыми значениями ath1 и ath2 для максимального бокового ускорения транспортного средства и генерирования классифицирующего сигнала на основе этого сравнения. Сравнение осуществляется согласно варианту осуществления посредством использования формулы:
Классифицирующий сигнал тогда показывает g, которое в этом примере является значением между 0 и 10. 10 является максимальной количественной оценкой и 0 наименьшей возможной. Блок-схема на фиг.6 иллюстрирует способ оценки того, вел ли водитель слишком быстро на повороте. Согласно одному варианту осуществления на первом этапе S61 проверяют, осуществляет ли транспортное средство движение на повороте, например, больше ли его ускорение чем 0. Если это имеет место, за этим следует согласно одному варианту осуществления проверка на этапе S62 того, что поворот является достаточно значительным, например достаточно длительным и/или крутым. Если это имеет место, может осуществляться оценка и определяться максимальное боковое ускорение alat_max транспортного средства. Этап S63 сравнивает alat_max с пороговыми значениями согласно формуле (1), и на этапе S64 генерируется классифицирующий сигнал. Информацию в классифицирующем сигнале затем представляют на этапе S65 посредством блока вывода. В случае низкого классифицирования имеется также возможность, состоящая в том, что водителю дается указание посредством блока вывода, чтобы побудить его/ее уменьшить скорость перед поворотом в следующий раз. Согласно одному варианту осуществления пороговые значения ath1 и ath2 являются такими же, как пороговые значения y1 и y2 на фиг.4.
Однако оценка согласно случаю 2 не является необходимо привязанной к максимальному ускорению транспортного средства. Вместо использования максимального бокового ускорения alat_max транспортного средства, как в вышеописанном варианте осуществления, вместо этого согласно варианту осуществления используется среднее боковое ускорение alat_mean транспортного средства через поворот. В этом случае блок вычисления выполнен с возможностью определения среднего бокового ускорения alat_mean транспортного средства и сравнения его с двумя пороговыми значениями ath3 и ath4 для среднего бокового ускорения транспортного средства и для генерирования классифицирующего сигнала на основе сравнения. Блок-схема на фиг.6 является поэтому такой же для этого варианта осуществления за исключением того, что на этапе S63 и этапе S64 используют вместо этого среднее боковое ускорение транспортного средства, как также показано на блок-схеме.
Согласно одному варианту осуществления дорога известна заранее, в этом случае блок вычисления может быть выполнен с возможностью генерирования указаний водителю, которые отображаются посредством блока ввода, если он/она почти входит в дугу на слишком высокой скорости, со ссылкой на наивысшую количественную оценку.
На скользких дорожных поверхностях транспортное средство может терять сцепление в продольном направлении. Согласно варианту осуществления система учитывает факторы, такие как скользкая дорожная поверхность или дождь, и адаптирует пороговые значения соответственно. Указания могут также даваться водителю перед или после поворота.
Различные указания и формы обратной связи могут даваться водителю посредством блока ввода. Далее следует некоторое количество примеров предполагаемой обратной связи для водителя в опознанной ситуации.
Там, где обнаруживается ситуация с очень большим боковым ускорением, например, если g=1 согласно формуле (1), водитель принуждается поддерживать более низкую скорость движения на повороте. В случае от среднего до высокого бокового ускорения, например, g=5 согласно формуле (1), если водитель затормозил транспортное средство на повороте, он/она принуждается поддерживать более низкую скорость движения на повороте.
В случае низкого бокового ускорения, например g=9, согласно формуле (1), если водитель освободил педаль акселератора в правильное время перед поворотом, и торможение на повороте не происходило, признается его/ее хорошее вождение.
В ситуации с большим боковым ускорением, где отношение между максимальным боковым ускорением и средним боковым ускорением превосходит пороговое значение, водитель принуждается избегать "рывков" в течение поворота.
Согласно одному варианту осуществления упомянутое ускорение является продольным ускорением along транспортного средства. Это делает возможным оценивать то, как хорошо водитель осуществляет ускорение в продольном направлении.
Оценка ускорения в продольном направлении требует согласно одному варианту осуществления удовлетворение, по меньшей мере, одного ситуационного критерия. Если, по меньшей мере, один ситуационный критерий удовлетворяется, тогда блок вычисления выполнен с возможностью позволять оценивать продольное ускорение транспортного средства. Согласно одному варианту осуществления упомянутый ситуационный критерий является либо тем, что продольное ускорение along больше, чем предварительно определенное пороговое значение, или тем, что скорость транспортного средства увеличивается на более чем заданное количество км/ч. Это дает возможность гарантировать, что очень маленькие изменения в ускорении транспортного средства не оцениваются, и также, что водитель осуществляет вождение в нормальных условиях движения.
Так в вышеуказанном случае 2 также возможно оценивать ускорение в продольном направлении, что указывается здесь как случай 3.
Случай 3
Оценка здесь основывается на том, как водитель осуществляет ускорение на основе допустимого опорного ускорения, которое зависит от скорости транспортного средства. Чем больше скорость, поддерживаемая транспортным средством, тем меньше ожидается, что водителю необходимо ускоряться. Согласно одному варианту осуществления блок вычисления выполнен с возможностью определения опорных значений amax_long1 и amax_long2 на основе пороговых значений для допустимого мгновенного ускорения along транспортного средства при текущей скорости транспортного средства и сравнения мгновенного ускорения along транспортного средства с amax_long1 и amax_long2 и генерирования классифицирующего сигнала на основе этого сравнения.
Сравнение осуществляется согласно одному варианту осуществления с помощью формулы:

Классифицирующий сигнал тогда показывает оценку g. Формула (2) основывается на мгновенном ускорении или максимальном ускорении. Это может, конечно, преобразовываться в вычисление над средним ускорением за некоторый период времени, например, полного или частей процесса ускорения. Блок вычисления выполнен с возможностью определения опорных значений amean_long1 и amean_long2 на основе пороговых значений для допустимого среднего ускорения amean_long транспортного средства при текущей средней скорости и сравнения его среднего ускорения amean_long с amean_long1 и amean_long2 и генерирования классифицирующего сигнала на основе сравнения. Формула (2) может использоваться для сравнения, но с измененными параметрами.
Фиг.7 является диаграммой, иллюстрирующей то, как опорные значения amax_long1 и amax_long2 и опорные значения amean_long1 и amean_long2 вычисляются для мгновенного ускорения along. Ось y обозначает значения ускорения, ось х - значения скорости. Задано следующее: продольное ускорение along транспортного средства, текущая скорость vcurr и максимальная скорость vmax, минимальное ускорение amin и два пороговых значения amax1 и amax2 для допустимого опорного ускорения транспортного средства. Из них возможно получать пределы для допустимого продольного ускорения транспортного средства. В зависимости от значений along и vcurr тогда получаются опорные значения. Диаграмма ясно иллюстрирует, что чем более высокой является скорость транспортного средства, тем меньше допустимое ускорение.
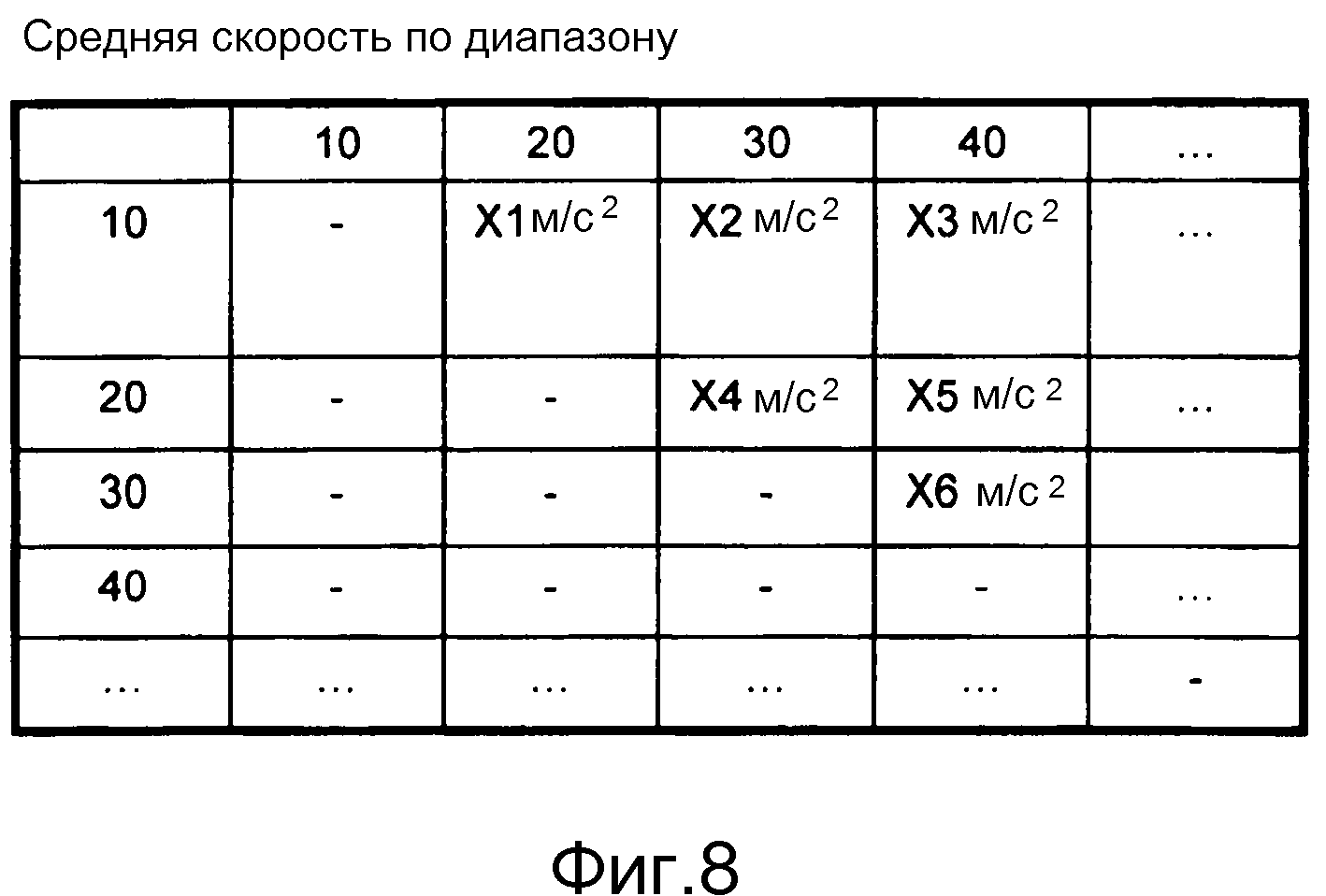
Другой вариант осуществления использует таблицу диапазонов скорости и уровней допустимого ускорения, чтобы оценивать относящееся к ускорению поведение водителя. Пример такой таблицы показан на фиг.8. Если, например, скорость транспортного средства изменяется от 10 км/ч до 20 км/ч, допустимое ускорение согласно таблице - это X1 м/с2. Блок вычисления в этом варианте осуществления выполнен с возможностью наблюдения скорости и ускорения транспортного средства, и когда наблюдается увеличение в его скорости внутри любого из диапазонов на диаграмме, его ускорение сравнивается с допустимым ускорением в таблице и генерируется классифицирующий сигнал. Если, например, его ускорение больше, чем то, что в таблице, классифицирующий сигнал будет показывать низкую количественную оценку. Согласно одному варианту осуществления табличные значения X1-Xn являются переменными и зависят, например, от веса транспортного средства. Например, более высокие ускорения являются допустимыми при низком весе транспортного средства.
Упомянутое ускорение a содержит согласно одному варианту осуществления как боковое, так и продольное ускорение, что делает возможным оценивать как боковое, так и продольное ускорение, как описано выше.
Изобретение относится также к компьютерному программному продукту, который содержит компьютерные программные инструкции, чтобы обеспечивать возможность компьютерной системы в транспортном средстве выполнять этапы согласно способу, когда компьютерные программные инструкции исполняются на упомянутой компьютерной системе. Изобретение содержит также компьютерный программный продукт, который имеет компьютерные программные инструкции, хранимые на носителе, который может считываться компьютерной системой.
Настоящее изобретение не ограничено вариантами осуществления, описанными выше. Могут использоваться различные альтернативы, модификации или эквиваленты. Вышеупомянутые варианты осуществления поэтому не ограничивают объем изобретения, который определяется посредством прилагаемой формулы изобретения.
Реферат
Изобретение относится к способу оценки для оценивания выполнения ускорения водителем транспортного средства. При выполнении способа определяют продольное или боковое ускорение a транспортного средства. Вычисляют пороговые значения для ускорения а, которые зависят от скорости транспортного средства, ускорения транспортного средства, радиуса кривизны дороги или угла дуги дороги. Пороговые значения указывают пределы, в которых продольное или боковое ускорение a транспортного средства является безопасным и комфортным. Сравнивают ускорение a с пороговыми значениями и генерируют на основе сравнения классифицирующий сигнал, относящийся к упомянутым вычисленным одному или более пороговым значениям. Предоставляют информацию от классифицирующего сигнала водителю после того, как упомянутое ускорение а закончилось. Предложена также система для оценивания характеристики ускорения транспортного средства. Достигается улучшение характеристик ускорения, выполняемого водителем. 2 н. и 24 з.п. ф-лы, 8 ил.
Формула
- определяют ускорение а транспортного средства, которое является боковым и/или продольным ускорением;
- вычисляют одно или более пороговых значений для его ускорения, которые зависят от, по меньшей мере, одного характерного для ситуации параметра, при этом упомянутые одно или более пороговые значения указывают пределы, в которых боковое ускорение рассматривается как безопасное и комфортное или продольное ускорение как безопасное и комфортное;
- сравнивают ускорение а транспортного средства с упомянутыми одним или более пороговыми значениями и генерируют на основе сравнения классифицирующий сигнал, относящийся к упомянутым вычисленным одному или более пороговым значениям, с представлением информации из классифицирующего сигнала водителю после того, как упомянутое ускорение а закончилось, при этом упомянутый, характерный для ситуации параметр является любым из: скорости транспортного средства, его ускорения, радиуса кривизны дороги или угла дуги дороги.
- блок вычисления, выполненный с возможностью приема упомянутого сигнала ускорения, вычисления одного или более пороговых значений для ускорения транспортного средства, которые зависят от, по меньшей мере, одного характерного для ситуации параметра, при этом упомянутые одно или более пороговые значения указывают пределы, в которых боковое ускорение рассматривается как безопасное и комфортное или продольное ускорение как безопасное и комфортное, сравнения его ускорения а с упомянутыми одним или более пороговыми значениями и генерирования на основе сравнения классифицирующего сигнала, относящегося к упомянутым вычисленным одному или более пороговым значениям, и
- блок вывода, выполненный с возможностью представления информации из классифицирующего сигнала водителю после того, как упомянутое ускорение закончилось, при этом упомянутый характерный для ситуации параметр является любым из: скорости транспортного средства, его ускорения, радиуса кривизны дороги или угла дуги дороги.
Комментарии