Способ регулирования для насосного агрегата - RU2613474C2
Код документа: RU2613474C2
Чертежи


Описание
Изобретение относится к способу регулирования для насосного агрегата в пневматической или гидравлической системе, а также к насосной системе, которая выполнена для осуществления такого способа регулирования.
В разветвленных гидравлических системах, как, например, отопительных установках с множеством потребителей, или системах водоснабжения с различными точками отбора существует трудность в регулировании имеющихся в гидравлической системе насосных агрегатами для подачи рабочего среды таким образом, чтобы они во всех точках гидравлической системы обеспечивали достаточное давление, и одновременно давление не должно быть слишком высоким, чтобы, с одной стороны, избегать нежелательных шумов от потока в системе, а с другой стороны, чтобы обеспечивать минимальное энергопотребление в насосном агрегате.
В этом аспекте из уровня техники известны системы, которые в одном или нескольких местах в гидравлической системе регистрируют, например, температуру снабжения или расход и рассчитывают регулирование насосного агрегата на область с наивысшей нагрузкой. Такая система известна, например, из DE 3315828.
Задачей изобретения является усовершенствовать способ регулирования для насосного агрегата в пневматической или гидравлической системе таким образом, чтобы при минимальном энергопотреблении насосного агрегата гидравлическая система снабжалась давлением так, чтобы клапанные элементы, расположенные в гидравлической системе, могли работать в оптимальном диапазоне регулирования.
Эта задача решается способом регулирования с признаками, указанными в пункте 1 формулы изобретения, а также насосной системой с признаками, указанными в пункте 19 формулы изобретения. Предпочтительные формы выполнения следуют из зависимых пунктов, последующего описания, а также из приложенных чертежей.
Соответствующий изобретению способ регулирования предусмотрен для по меньшей мере одного насосного агрегата в пневматической или гидравлической системе. Такая гидравлическая система может, например, быть сетью водоснабжения или системой отопления, в частности с множеством потребителей. В такой гидравлической системе у различных потребителей могут быть предусмотрены клапаны для установки или соответственно регулирования расхода для соответствующего потребителя.
Далее изобретение описывается на основе гидравлической системы, однако должно быть понятно, что изобретение соответствующим образом может найти применение также в пневматической системе, например, системе вентиляции, такой как система отопления или кондиционирования воздуха, которая работает с регулируемым по температуре воздухом. Также следует иметь в виду, что когда изобретение далее описывается на примере системы отопления, изобретение соответствующим образом также может быть применено к другим гидравлическим системам, таким как системы кондиционирования воздуха или системы водоснабжения.
В соответствующем изобретению способе регулирования предусмотрено, что число оборотов по меньшей мере одного насосного агрегата может регулироваться в зависимости от по меньшей мере одной переменной, регистрируемой в системе. При этом может быть предусмотрен единственный насосный агрегат, однако может также предусматриваться несколько включенных параллельно и/или последовательно насосных агрегатов, которые могут регулироваться соответствующим образом.
В соответствии с изобретением предусмотрено, что зарегистрированная переменная не непосредственно берется за основу регулирования, а что из по меньшей мере одной зарегистрированной переменной на основе кусочно-заданной или кусочно-монотонной функции формируется сигнал ошибки, на основе которого регулируется число оборотов насосного агрегата. Под кусочно-монотонной функцией при этом понимается функция, которая составляется из по меньшей мере двух функций или интервалов с различными свойствами функции. При этом функция на всех интервалах является, соответственно, монотонной. Эта кусочно-монотонная функция означает, например, что для различных диапазонов величин зарегистрированных переменных в основу расчета сигнала ошибки берутся различные функции. Применение сигнала ошибки имеет преимущество, состоящее в том, что оно может проще включаться в регулирование насосного агрегата, так как сигнал ошибки через функцию может регулироваться таким образом, что за основу регулирования насосного агрегата берется сигнал ошибки, который не зависит от точного выполнения гидравлической системы и ее компонентов. Это обеспечивает возможность простого согласования и, в частности, также простого регулирования насосного агрегата на основе нескольких сигналов ошибки, так как они простым способом могут связываться друг с другом, например, суммироваться или выбираться подходящим способом.
Переменная может регистрироваться в системе подходящими датчиками или приниматься или соответственно выдаваться непосредственно исполнительными элементами, например, клапанами, в качестве параметра, характерного для их функционального состояния.
Так, по меньшей мере одна переменная является, например, значением давления, регистрируемым в системе, или степенью открытия клапана. Степень открытия клапана может непосредственно определяться на клапане или быть управляющим сигналом для клапана, который пропорционален степени открытия клапана. Для регистрации значения давления можно, например, отдельный датчик давления разместить в гидравлической или пневматической системе.
Согласно другому предпочтительному варианту выполнения, по меньшей мере одна переменная может быть регистрируемым в системе значением температуры или значением расхода. Для этого в системе также могут быть предусмотрены соответствующие датчики. Значение расхода может также, например, выводиться непосредственно из другого, размещенного в системе насосного агрегата, за счет того, что оно там определяется на основе других регистрируемых в насосном агрегате параметров, в частности, числа оборотов насосного агрегата. В случае, когда несколько переменных регистрируются в системе, это могут быть несколько значений давления, несколько степеней открытия клапанов, несколько значений температуры или несколько значений расхода. Различные значения могут также регистрироваться в комбинации, причем для каждой переменной на основе упомянутой кусочно-монотонной функции выдается соответствующий сигнал ошибки. Вычисление или соответственно выдача сигнала ошибки имеет преимущество, состоящее в том, что простым способом в регулирование насосного агрегата могут включаться различные переменные, например, степени открытия клапанов и зарегистрированные значения температуры.
Предпочтительным образом способ регулирования служит для регулирования гидравлического параметра до гидравлического заданного значения. Это могут быть, например, давление, температура, расход и/или, например, степень открытия клапана и т.п. Посредством регулирования или соответственно изменения числа оборотов этот гидравлический параметр регулируется до желательного заданного значения. При этом описываемый сигнал ошибки предпочтительно образует компонент контура регулирования, то есть регулирование осуществляется через сигнал ошибки или соответственно сигналы ошибки. Сигналы ошибки, как описано выше, формируются через кусочно-монотонную функцию в зависимости от переменной, зарегистрированной в системе. При этом зарегистрированная в системе переменная соответствует подлежащему регулированию гидравлическому параметру или представляет собой значение, которое является репрезентативным для подлежащего регулированию гидравлического параметра. В зависимости от сигнала ошибки или сигналов ошибки регулируется или соответственно изменяется число оборотов насосного агрегата, чтобы привести регулируемый гидравлический параметр до желательного заданного значения. Посредством сигналов ошибки можно также, как описано ниже, несколько гидравлических параметров одновременно регулировать или соответственно оптимизировать в замкнутых контурах регулирования.
Предпочтительным образом, зарегистрированная переменная для вычисления сигнала ошибки сравнивается с по меньшей мере одним предельным значением, и при достижении предельного значения функция из группы функций, на основе которой формируется сигнал ошибки, меняется предопределенным образом. Это означает, что предельное значение образует границу между двумя отрезками или соответственно функциями кусочно-монотонной функции. То есть, для различных предопределенных диапазонов величин переменной предусмотрены различные функции для определения сигнала ошибки. Так могут, например, предусматриваться две связанные друг с другом функции или два интервала кусочно-монотонной функции, причем первая функция, например, применяется ниже предельного значения, а вторая функция применяется, например, при достижении и превышении предельного значения. Соответственно, может применяться и больше, чем две функции или два интервала, которые при соответствующих предельных значениях меняются.
Предпочтительным образом, зарегистрированная переменная может сравниваться с верхним и нижним предельным значением и при достижении верхнего предельного значения, а также при достижении нижнего предельного значения соответствующий интервал кусочно-монотонной функции или функция из группы функций, на основе которой формируется сигнал ошибки, может меняться предопределенным образом. Так, в этом варианте выполнения, могут применяться, например, три различные функции или интервала, причем первая функция может применяться ниже нижнего предельного значения, вторая функция - между нижним и верхним предельным значением и третья функция – выше верхнего предельного значения.
Согласно другому предпочтительному варианту выполнения, функции, применяемые выше верхнего предельного значения и/или ниже нижнего предельного значения, выдают зависимый от величины зарегистрированной переменной, в частности, линейно зависимый сигнал ошибки. При этом также ниже нижнего предельного значения и выше верхнего предельного значения может использоваться одна и та же функция.
Согласно другому предпочтительному варианту выполнения, ниже верхнего предельного значения и/или выше нижнего предельного значения может использоваться функция, которая выдает зависимый от величины переменной, в частности, линейно зависимый сигнал ошибки, причем функция между переменной и сигналом ошибки выше и ниже соответствующего предельного значения различны, в частности, имеют различную крутизну. Так, например, между нижним и верхним предельным значением может использоваться функция с меньшей крутизной, чем выше верхнего и ниже нижнего предельного значения.
Согласно другому предпочтительному варианту выполнения, в области выше нижнего предельного значения и ниже верхнего предельного значения функция может иметь нулевую точку со сменой знака. Нулевая точка лежит предпочтительно в середине между верхним и нижним предельным значением. В нулевой точке сигнал ошибки должен был бы равняться нулю. Это позволяет выполнять регулирование насосного агрегата таким образом, что оно предпочтительно регулирует насосный агрегат по числу оборотов таким образом, что переменная в области нулевой точки или несколько переменных регулируются таким образом, что сигналы ошибки во всей системе суммируются до нуля, то есть системные параметры устанавливаются таким образом, что сумма сигналов ошибки предпочтительно принимает нулевое значение или приближается к нулевому значению.
Согласно другому предпочтительному варианту выполнения изобретения, сигнал ошибки, который выдается при достижении верхнего предельного значения и выше верхнего предельного значения, может иметь другой знак, чем сигнал ошибки, который выдается при достижении или ниже нижнего предельного значения. Это обеспечивает возможность регулирования, которое способствует тому, чтобы поддерживать переменную в области между верхним и нижним предельным значением.
Согласно другому предпочтительному варианту выполнения, функция или соответственно интервал кусочно-монотонной функции может или несколько используемых функций или соответственно интервалов могут также быть выполнены таким образом, что они выдают постоянное значение, в частности, нулевое значение для сигнала ошибки. Так, например, выше или ниже предельного значения функция может быть выбрана таким образом, что она выдает такое постоянное значение.
Кроме того, предпочтительно, формирование сигнала ошибки может осуществляться в устройстве обработки сигнала, соотнесенном с датчиком для регистрации переменных, и сформированный сигнал ошибки может передаваться на устройство регулирования насосного агрегата, которое осуществляет регулирование числа оборотов насосного агрегата. Это выполнение является особенно предпочтительным, так как таким образом устройство управления насосного агрегата может выполняться полностью независимо от типа применяемых датчиков или соответственно исполнительных элементов, в которых регистрируются переменные. Устройство обработки сигнала может специально согласовываться с соответствующим датчиком или соответственно исполнительным элементом, например клапаном, так что оно содержит подходящие или соответственно желательные функции, которые учитывают характеристические свойства датчика или соответственно области гидравлической системы, в котором регистрируется переменная. Сигнал ошибки может быть согласован с применяемым устройством управления или регулирования насосного агрегата, так что выдается стандартизированный сигнал ошибки. Предпочтительным образом, функции в устройстве обработки сигнала могут быть согласуемыми или регулируемыми.
Особенно предпочтительным образом устройство обработки сигнала может быть непосредственно встроено в датчик или соответственно исполнительный элемент, такой как клапан. Устройство обработки сигнала может, однако, также выполняться как отдельный компонент, на который в качестве входного параметра может подводиться выходной сигнал датчика или соответственно исполнительного элемента, такого как клапан. Также возможно предусмотреть устройство обработки сигнала, которое обслуживает несколько датчиков или соответственно исполнительных элементов, таких как клапаны, и соответственно выдается несколько сигналов ошибки для подключенных датчиков или соответственно исполнительных элементов.
Как уже описано выше, система выполнена так, что регистрируются несколько переменных, основываясь на которых, соответственно, на основе группы из по меньшей мере двух связанных друг с другом функций или соответственно кусочно-монотонной функции формируется сигнал ошибки. При этом предпочтительным образом для каждой из переменных соответствующей кусочно-монотонной функцией формируется соответствующий сигнал ошибки. Так как сигналы ошибки предпочтительным образом, как описано выше, стандартизированы, и согласование с соответствующими датчиками или соответственно областями системы, в которой размещены датчики, осуществляется через соответствующие функции, это позволяет без проблем комбинировать в системе друг с другом различные датчики или соответственно исполнительные элементы, такие как клапаны, которые регистрируют или соответственно выдают переменные, и включать в регулирование насосного агрегата.
Согласно изобретению несколько, предпочтительно все сигналы ошибки суммируются в системе, и регулирование числа оборотов насосного агрегата осуществляется на основе просуммированных сигналов ошибки. При этом регулирование числа оборотов насосного агрегата осуществляется таким образом, что суммарный сигнал ошибки приближается к нулю. Таким образом различные сигналы ошибки связываются друг с другом, и число оборотов насосного агрегата регулируется таким образом, что во всех областях системы, в которых регистрируются переменные, на основе которых определяются сигналы ошибки, реализуются желательные гидравлические заданные значения, такие как давление, температура, расход и/или, например, степень открытия клапана и т.п.
Согласно особому варианту выполнения изобретения, отдельные сигналы ошибки перед суммированием могут умножаться на индивидуальные весовые коэффициенты. Это умножение может также осуществляться в вышеописанном устройстве обработки сигнала или устройстве управления насосного агрегата. Посредством весовых коэффициентов сигналы ошибки отдельных компонентов в системе взвешиваются различным образом, так что, например, определенным клапанам или участкам системы может придаваться более высокий вес при регулировании насосного агрегата, чтобы, например, в этой области постоянно приоритизировать требуемый расход.
Согласно альтернативному варианту выполнения изобретения, можно выбирать из множества сигналов ошибки один или несколько сигналов ошибки, на основе которых осуществляется регулирование числа оборотов насосного агрегата. И в этом случае может, при необходимости, осуществляться взвешивание или приоритизация сигнала ошибки. Так отдельным сигналам ошибки может присваиваться приоритет для выбора. Если выбирается несколько сигналов ошибки, то они вновь могут, как описано выше, суммироваться или также, при необходимости, сначала умножаться на весовые коэффициенты.
Число оборотов насосного агрегата предпочтительно регулируется в зависимости от дифференциального давления или расхода, и дифференциальное давление или расход регулируется на основе одного или нескольких сигналов ошибки. То есть, на основе сигналов ошибки сначала выбирается желательное дифференциальное давление или расход, и затем осуществляется регулирование насосного агрегата таким образом, что это дифференциальное давление или расход достигается в насосном агрегате. Для этого число оборотов насосного агрегата может варьироваться устройством управления насосного агрегата.
Число оборотов насосного агрегата может изменяться в зависимости от сигнала ошибки непосредственно или опосредованно с предопределенными шагами. Если сигнал ошибки применяется, например, для определения дифференциального давления или расхода, которое должно достигаться в насосном агрегате, как описано выше, это было бы опосредованным заданием числа оборотов. Посредством сигнала ошибки может осуществляться согласование числа оборотов непосредственным или опосредованным образом или также согласование с предопределенными шагами, за которые число оборотов повышается или снижается, чтобы достичь желательного расхода и/или дифференциального давления, или также непосредственно минимизации сигнала ошибки.
Особенно предпочтительно, можно регулировать число оборотов по меньшей мере одного насосного агрегата, дополнительно к сигналу ошибки, на основе алгоритма для минимизации потребления мощности или соответственно энергопотребления. Эти оба алгоритма или соответственно регулирования могут связываться друг с другом или накладываться друг на друга, так что управление насосом постоянно стремится к тому, чтобы минимизировать энергопотребление, пока сигналы ошибки удерживаются на минимальном значении или соответственно в идеальном случае на нулевом значении. Если на устройство регулирования подаются сигналы ошибки, это приводит, при обстоятельствах, к изменению числа оборотов насосного агрегата, которое противодействует минимизации энергопотребления. Это осуществляется до тех пор, пока гидравлические параметры системы посредством регистрации соответствующими датчиками не будут удерживаться в желательных пределах. Если одновременно осуществляется минимизация энергопотребления, таким образом, достигается то, что гидравлические заданные значения могут достигаться при минимальном энергопотреблении.
Алгоритм для минимизации энергопотребления предпочтительно выполняется соответственно так, что он стремится к уменьшению числа оборотов насосного агрегата. Если уменьшение числа оборотов приводит к тому, что отдельные датчики или исполнительные элементы выдают сигналы ошибки, то эти сигналы ошибки вызывают, например, вновь повышение числа оборотов, так что могут достигаться гидравлические заданные значения.
Наряду с вышеописанным способом регулирования, предметом изобретения также является насосная система. Соответствующая изобретению насосная система имеет по меньшей мере один датчик для регистрации переменных в гидравлической или пневматической системе. При этом датчик может быть датчиком, как было описано выше, который регистрирует температуру, расход и/или давление. При этом датчик может быть выполнен как отдельный датчик или часть устройства регулирования, например, клапана или насосного агрегата. В случае клапана датчик может регистрировать и выдавать степень открытия клапана. Под датчиком при этом понимается также исполнительное устройство, такое как клапан, который иным образом регистрирует и выдает степень открытия. В насосном агрегате, например, из электрических и/или гидравлических параметров может также регистрироваться или соответственно определяться расход и выдаваться соответствующим датчиком.
Дополнительно к датчику, предусмотрено по меньшей мере одно устройство обработки сигнала, которое выполнено с возможностью формирования по меньшей мере одного сигнала ошибки на основе зарегистрированных переменных. Кроме того насосная система имеет по меньшей мере один насосный агрегат с устройством регулирования, которое выполнено с возможностью приема по меньшей мере одного сигнала ошибки от устройства обработки сигнала и регулирования насосного агрегата на основе по меньшей мере одного сигнала ошибки. При этом устройство регулирования и устройство обработки сигнала выполнены с возможностью осуществления способа регулирования, как он описан выше. Устройство обработки сигнала и устройство регулирования предпочтительно пространственно разнесены относительно друг друга, но, при необходимости, могут быть встроены также в один электронный узел. Предпочтительным образом устройство обработки сигнала расположено вблизи датчика, в частности, встроено в него, в то время как устройство регулирования расположено предпочтительно вблизи насосного агрегата, предпочтительно в корпусе электроники непосредственно на приводном двигателе насосного агрегата.
Далее изобретение описывается на основе приложенных чертежей, на которых показано следующее:
Фиг. 1 - первый пример для гидравлической системы согласно изобретению,
Фиг. 2 - второй пример для гидравлической системы согласно изобретению,
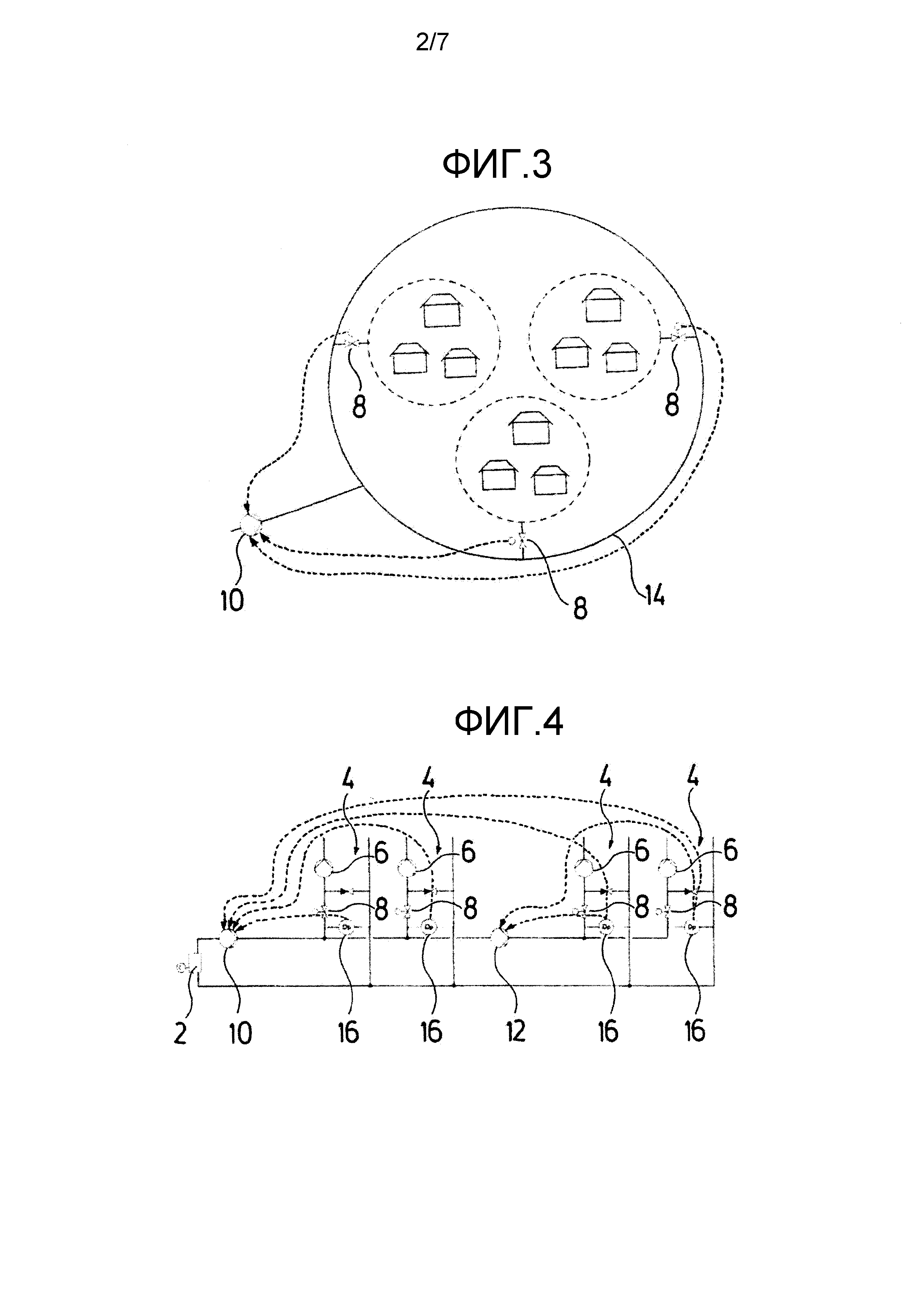
Фиг. 3 - третий пример для гидравлической системы согласно изобретению,
Фиг. 4 - четвертый пример для гидравлической системы согласно изобретению,
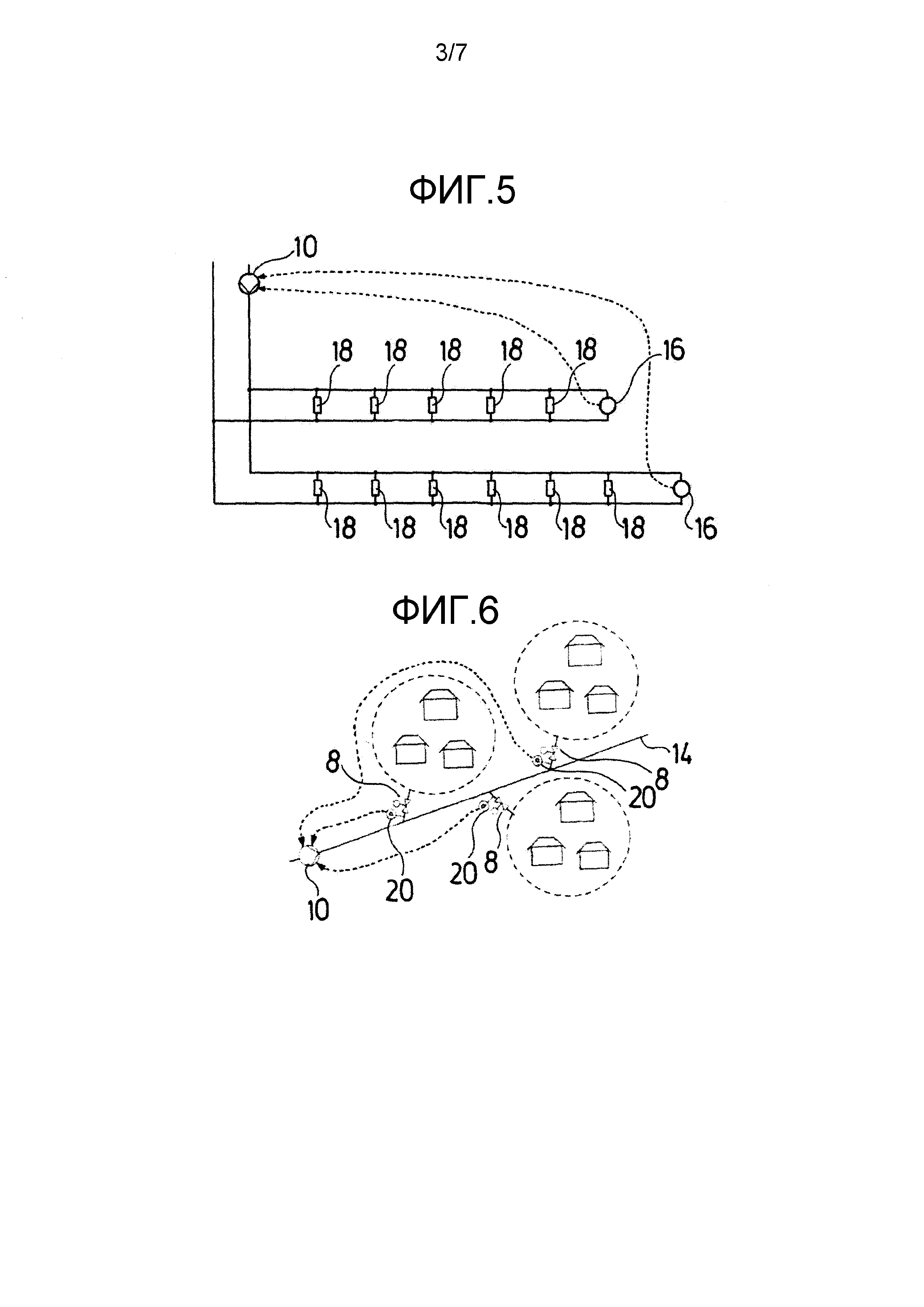
Фиг. 5 - пятый пример для гидравлической системы согласно изобретению,
Фиг. 6 - шестой пример для гидравлической системы согласно изобретению,
Фиг. 7 - седьмой пример для гидравлической системы согласно изобретению,
Фиг. 8А-8С - три варианта для группы функций для формирования сигнала ошибки на основе степени открытия клапана,
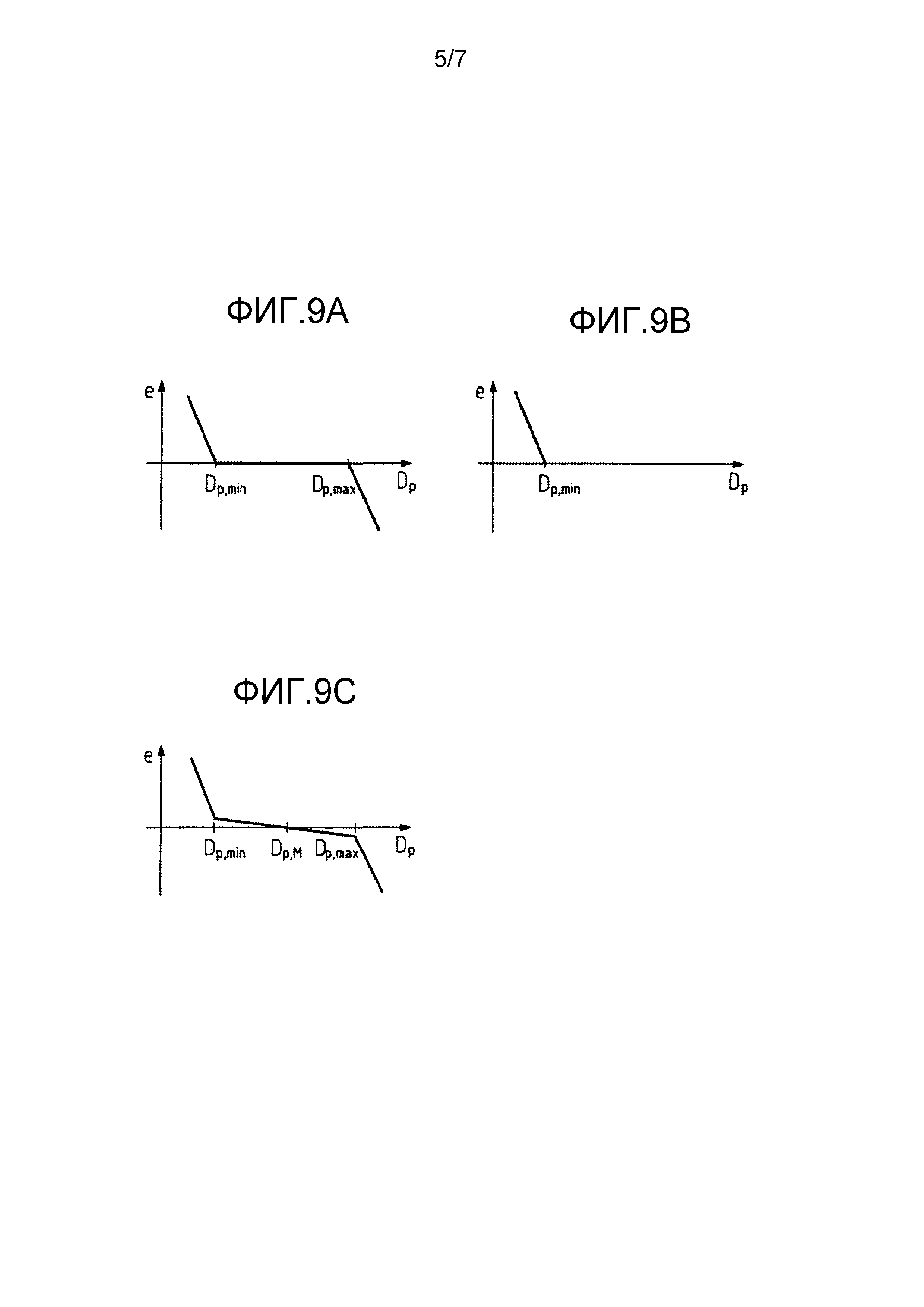
Фиг. 9А-9С - три варианта группы связанных функций для формирования сигнала ошибки на основе дифференциального давления,
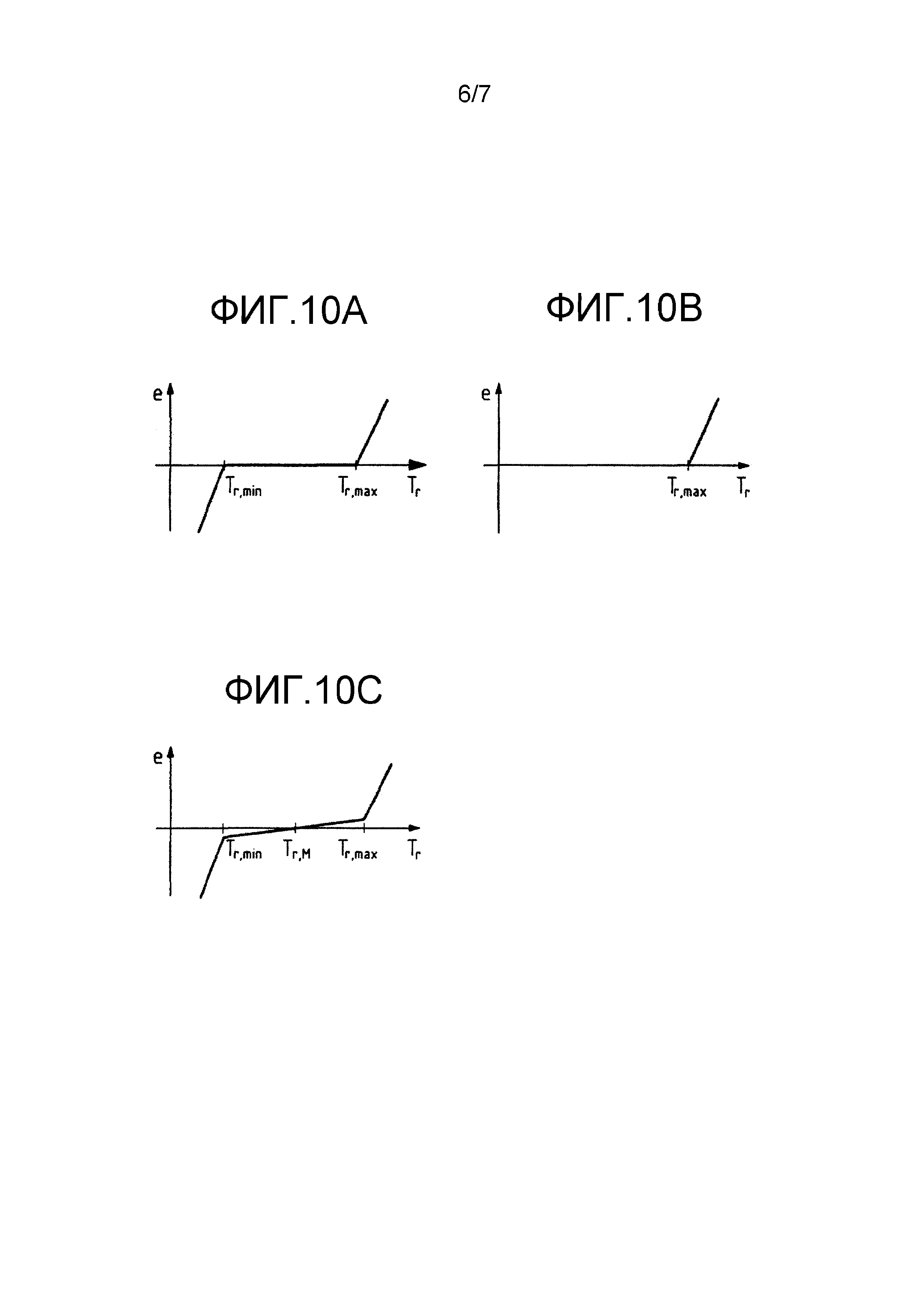
Фиг. 10А-10С - три варианта группы функций для формирования сигнала ошибки на основе значений температуры,
Фиг. 11 - соответствующий изобретению способ регулирования согласно первому варианту выполнения,
Фиг. 12 - схематичное представление соответствующего изобретению способа регулирования согласно второму варианту выполнения.
На основе фиг. 1-7 описаны различные варианты гидравлических систем, в которых может применяться соответствующий изобретению способ регулирования, как он будет описан ниже. Следует понимать, что этот принцип может переноситься с гидравлических систем аналогичным образом на пневматические системы, например, системы вентиляции которые также являются предметом изобретения.
На Фиг. 1 показана система отопления и/или охлаждения с источником 2 тепла или холода, который в случае источника тепла может представлять собой, например, нагревательный котел. Показанная система содержит несколько, в данном примере четыре нагрузочных контура 4, которые в качестве смесительных контуров оснащены, соответственно, смесительным насосом 6 и регулировочным клапаном 8. Посредством степени открытия регулировочного клапана 8 регулируется подача теплоносителя от источника 2 тепла или холода в соответствующий нагрузочный контур. Это может, например, осуществляться в зависимости от температуры помещения, чтобы достичь предопределенной температуры помещения. В подводящем трубопроводе в данном случае размещены два насосных агрегата 10, 12 в форме циркуляционных насосных агрегатов, которые транспортируют теплоноситель, например воду, от источника 2 тепла или холода к нагрузочным контурам 4. При этом насосный агрегат 10 расположен выше по потоку от всех четырех нагрузочных контуров, в то время как второй насосный агрегат 12 расположен ниже по потоку от первых двух нагрузочных контуров и выше по потоку от последующих двух нагрузочных контуров 4. Регулировочные клапаны 8 выполнены таким образом, что они регистрируют степень открытия клапана и в устройстве обработки сигнала, как будет изложено ниже, формируют сигнал ошибки, который передается на насосные агрегаты 10 и 12 для регулирования их числа оборотов. Это показано на фиг. 1 посредством пунктирных линий, причем показано, что сигналы ошибки всех четырех регулировочных клапанов 8 передаются к первому насосному агрегату 10, в то время как сигналы ошибки обоих расположенных ниже по потоку нагрузочных контуров 4 передаются только на второй насосный агрегат 12, который предусмотрен для снабжения этих обоих нагрузочных контуров 4.
Показанная на фиг. 2 гидравлическая система представляет собой сеть водоснабжения с насосным агрегатом 10 и тремя регулировочными клапанами 8. В этом случае регулировочные клапаны 8 могут служить в качестве регуляторов давления, чтобы регулировать давление в подключенных отводах гидравлической системы. Насосный агрегат 10 питает центральный питающий трубопровод 14, от которого ответвляются отводы с регулировочными клапанами 8, например, соответственно, для снабжения нескольких зданий, например, городского квартала. Посредством регулировочных клапанов 8 регулируется давление в этих частях или соответственно отводах. Также эти регулировочные клапаны 8 выдают их степень открытия клапана, на основе которой, как описывается далее, в устройстве обработки сигнала формируется сигнал ошибки, который передается на насосный агрегат 10, чтобы на основе этих сигналов ошибки регулировать его число оборотов.
Под насосным агрегатом 10 в смысле этого описания может также пониматься компоновка из нескольких насосов. Насосный агрегат может, например, быть бустерным насосом или компоновкой бустерных насосов, как они, например, могут использоваться в сети водоснабжения.
На Фиг. 3 показан вариант выполнения по фиг. 2, в котором питающий трубопровод 14 выполнен как кольцевой трубопровод. На Фиг. 4 показан вариант гидравлической системы по фиг. 1, в котором в нагрузочных контурах 4 не регистрируется степень открытия клапана регулировочного клапана 8, а с помощью датчика 16 дифференциального давления регистрируется дифференциальное давление Dp между входом нагрузочного контура 4 и его выходом. На основе этого дифференциального давления в подключенном, предпочтительно встроенном в устройство обработки сигнала, датчике 16 дифференциального давления формируется сигнал ошибки, который затем выдается на насосные агрегаты 10, 12 для регулирования их чисел оборотов. И здесь сигналы ошибки датчиков 16 дифференциального давления из всех четырех нагрузочных контуров берутся в основу регулирования числа оборотов первого, расположенного выше по потоку насосного агрегата 10, в то время как в основу регулирования числа оборотов второго, расположенного ниже по потоку насосного агрегата 12 берутся только сигналы ошибки тех датчиков 16 дифференциального давления, которые расположены в нагрузочных контурах, которые расположены ниже по потоку от второго насосного агрегата 12.
На Фиг. 5 показана гидравлическая система, в которой несколько потребителей 18, например, нагревателей, размещены в двух параллельных друг другу отводах, соответственно, параллельно друг другу. Оба параллельно соединенных отвода питаются общим насосным агрегатом 10 в форме рециркуляционного насосного агрегата флюидом, например теплоносителем в виде воды. На конце каждого отвода размещен датчик 16 дифференциального давления, который регистрирует дифференциальное давление Dp между впуском и выпуском соответствующего отвода на конце отвода. Датчики 16 дифференциального давления выдают через устройства обработки сигналов, как будет описано ниже, вновь сигналы ошибки, которые подводятся к насосному агрегату 10 для регулирования его числа оборотов.
На Фиг. 6 показана сеть водоснабжения, как она показана на фиг. 2, только здесь регистрируется не степень открытия клапана 8, а в отводах, в которых расположены регулировочные клапаны 8, размещены датчики 20 давления, которые регистрируют давление р в этих отводах. В соответствующем устройстве обработки сигнала, соответственно, на основе зарегистрированного давления р, как будет описано далее, формируется сигнал ошибки и передается на насосный агрегат 10 для регулирования его числа оборотов.
На Фиг. 7 показана гидравлическая система, аналогичная гидравлической системе по фиг. 1, причем вместо нагрузочных контуров 4 имеется множество потребителей 22, например, в качестве теплообменников в помещении или здании. Система может, например, быть системой отопления или охлаждения, причем в данном случае показан источник 2 тепла или холода в качестве теплообменника. В обратных линиях потребителей 22 здесь, соответственно, размещен датчик 24 температуры, который регистрирует температуру Т, то есть температуру Tr обратной линии соответствующего потребителя 22. На основе сигналов температуры датчиков 24 температуры, как будет описано ниже, в устройстве обработки сигнала, соответственно, формируется сигнал ошибки, который направляется на насосные агрегаты 10 и 12 для регулирования их числа оборотов. И здесь регулирование числа оборотов первого, расположенного выше по потоку насосного агрегата 10 осуществляется на основе сигналов ошибки всех датчиков 24 температуры, расположенных ниже по потоку, в то время как регулирование числа оборотов насосного агрегата 12 осуществляется только на основе сигналов ошибки тех датчиков 24 температуры, которые расположены ниже по потоку от второго насосного агрегата 12.
Насосные агрегаты 10 и 12 имеют, соответственно, собственное устройство управления или регулирования, которое особенно предпочтительно расположено в клеммной коробке или корпусе электроники непосредственно в насосном агрегате или соответственно на его электрическом приводном двигателе. Устройства обработки сигнала для формирования сигналов ошибки предпочтительно интегрированы в датчики, то есть регулировочные клапаны, если они регистрируют степень открытия клапана, датчики 16, 22 давления или датчики 24 температуры. Альтернативно, устройства обработки сигнала могут быть выполнены как отдельные конструктивные узлы, которые предпочтительно отделены от насосных агрегатов 10, 12. В общем, также возможно встроить устройства обработки сигнала в насосный агрегат, в частности, в устройство управления насосного агрегата. Устройства обработки сигнала обеспечивают то, что практически любые датчики и клапаны или исполнительные элементы, которые регистрируют их величину установки, например, степень открытия клапана, могут связываться с насосным агрегатом 10, 12.
Формирование сигналов ошибки далее будет описываться более подробно на основе примеров, показанных на фиг. 8-10.
На Фиг. 8А-8С показано три примера для формирования сигнала е ошибки на основе степени хр открытия клапана, которая, например, регистрируется и выдается вышеописанными регулировочными клапанами 8. В примере согласно фиг. 8А применяется кусочно-монотонная функция, в которой три функции или соответственно интервала с различными функциями связаны друг с другом:

Здесь имеется три функции. Выше одного предельного значения для степени хр,max открытия клапана, которое представляет собой верхнее предельное значение, выдается сигнал е ошибки согласно функции е=а(хр-хр,max), причем коэффициент а является предварительно установленной постоянной. Между предельными значениями хр,max и xp,min, причем xp,min представляет собой нижнее предельное значение для степени открытия клапана, функция соответствует постоянной, здесь нулевому значению. То есть, здесь сигнал ошибки е=0. Ниже нижнего предельного значения xp,min выдается сигнал е ошибки согласно функции е=a(xp-хр,min), то есть степень хр открытия клапана является линейно зависимым сигналом ошибки. Таким образом, в этом примере три функции связаны друг с другом, причем при достижении предельного значения хр,min и хр,max, соответственно, функция меняется. Желательная рабочая точка для соответствующего регулировочного клапана 8, для которого выдается степень открытия клапана, лежит в этом примере между пределами хр,min и хр,max, так что сигнал е ошибки сформирован таким образом, что регулирование стремится к тому, чтобы насосный агрегат 10 или насосный агрегат 12 регулировать по их числу оборотов таким образом, что регулировочный клапан 8 занимает желательную рабочую точку, т.е. степень хр открытия клапана, которая находится между предельными значениями xp,min и хр,max. Выше верхнего предельного значения хр,max и ниже нижнего предельного значения хр,min, соответственно, выдается сигнал е ошибки, который при регулировании числа оборотов насосного агрегата учитывается таким образом, что число оборотов измеряется, так что степень хр открытия клапана вновь может перемещаться в области между пределами хр,min и хр,max. Степень хр открытия клапана предпочтительно регулируется через независимое регулирование, например, в системе отопления посредством раумтермостата.
На Фиг. 8В показан вариант для группы функций согласно фиг. 8А, в котором отказываются от нижнего предельного значения хр,min и, тем самым, от третьей функции, которая применяется ниже предельного значения хр,min. То есть, здесь при спадании ниже верхнего предельного значения хр,max всегда выдается постоянное значение, равное нулю, для сигнала е ошибки.
На Фиг. 8С показан другой вариант, в котором функции для области ниже нижнего предела хр,min и выше верхнего предела хр,max соответствуют таковым, которые были описаны со ссылкой на фиг. 8А. Только между обоими пределами хр,min и хр,max здесь применяется функция, которая выдает не постоянное значение, равное нулю, а также линейно зависимый от степени хр открытия клапана сигнал е ошибки со сменой знака при степени хр,M открытия клапана, которая в этом примере лежит в середине между нижним и верхним предельным значением. Крутизна кривой для сигнала е ошибки между нижним пределом хр,min и верхним пределом хр,max при этом меньше, чем крутизна выше и ниже этих предельных значений. При таком регулировании сигнал е ошибки выдается таким образом, что посредством регулирования числа оборотов насосных агрегатов 10 и 12 достигается то, что степень хр открытия клапана предпочтительно поддерживается в области среднего значения хр,M.
На Фиг. 9А-9С показаны только три подобных примера для выдачи сигнала е ошибки на основе дифференциального давления Dp, как оно регистрируется, например, согласно примерам выполнения на фиг. 4 и 5. Согласно фиг. 9А, предусмотрена группа трех связанных друг с другом функций:

Здесь ниже минимального значения дифференциального давления, то есть нижнего предельного значения Dpmin выдается сигнал е ошибки согласно функции е=-a(Dp-Dpmin), причем а постоянный коэффициент. Между предельными значениями Dpmin и Dpmax (верхнее предельное значение) здесь также выдается постоянный сигнал е ошибки с нулевым значением.
Выше верхнего предельного значения Dpmax выдается сигнал е ошибки согласно функции е=-a(Dp-Dpmax). То есть ниже нижнего предельного значения Dpmin и выше верхнего предельного значения Dpmax выдается, соответственно, линейно зависимый от дифференциального давления Dp сигнал е ошибки. Пример выполнения согласно фиг. 9 В соответствует примеру выполнения согласно фиг. 9А, причем третья функция для области выше Dpmax отсутствует, то есть, здесь не имеется верхнего предельного значения Dpmax. Вместо этого выше нижнего предельного значения Dpmin всегда выдается постоянный сигнал е ошибки с нулевым значением.
В примере выполнения согласно фиг. 9С, как в примере выполнения по фиг. 8С, между предельными значениями Dpmin и Dpmax также выдается линейный, зависимый от зарегистрированного дифференциального давления Dp сигнал е ошибки, причем сигнал е ошибки при значении Dp,M имеет нулевую точку. Среднее значение Dp,M лежит посредине между предельными значениями Dpmin и Dpmax. Это регулирование подходит, чтобы дифференциальное давление, по существу, регулировать на среднее значение Dp,M, при этом выдается соответствующий сигнал е ошибки, если дифференциальное давление отклоняется от этого значения. Этот сигнал е ошибки в этом случае вновь оказывает влияние на число оборотов насосного агрегата.
На основе фиг. 10А-10С теперь описывается способ, в котором сигнал е ошибки выдается на основе зарегистрированного значения температуры. Значение температуры регистрируется, например, в поясненном выше примере согласно фиг. 7, в котором гидравлическая система является системой охлаждения. Зарегистрированное значение Т температуры является значением Tr температуры обратной линии. Сигнал ошибки в примере выполнения согласно фиг. 10А формируется согласно следующей группе функций:

То есть, ниже нижнего предельного значения Tr,min выдается сигнал е ошибки согласно функции е=-а(Tr-Tr,min), то есть сигнал е ошибки, который линейно зависит от температуры Tr обратной линии и при уменьшающейся температуре обратной линии сильнее снижается, причем сигнал ошибки отрицателен. Между нижним пределом Tr,min и верхним пределом Tr,max выдается постоянный сигнал е ошибки с нулевым значением. Выше верхнего предельного значения Tr,max выдается линейно зависимый от температуры Tr сигнал е ошибки согласно уравнению е=-a(Tr-Tr,max). В вышеуказанных уравнениях значение а является постоянным коэффициентом. Выше значения Tr,max, таким образом, выдается сигнал е ошибки, который линейно возрастает с температурой Tr.
Пример выполнения согласно фиг. 10В отличается от примера выполнения согласно фиг. 10А тем, что первое уравнение для области ниже нижнего предельного значения Tr,min отсутствует, то есть имеются только две функции. Выше предельного значения Tr,max применяется линейно зависимая функция для сигнала е ошибки, как она была описана выше. Ниже значения Tr,max выдается постоянный сигнал е ошибки с нулевым значением.
Пример выполнения согласно фиг. 10С в отношении двух функций для областей ниже нижнего предела Tr,min и выше верхнего предела Tr,max идентичны примеру выполнения согласно фиг. 10А. В области между нижним пределом Tr,min и верхним пределом Tr,max применяется функция, согласно которой сигнал е ошибки также является линейно зависимым от зарегистрированного значения Tr температуры, причем крутизна этой функции меньше, чем таковая ниже и выше упомянутых предельных значений. Кроме того, функция между пределами имеет нулевую точку при среднем значении Tr,M, которое лежит посредине между нижним пределом Tr,min и верхним пределом Tr,max. То есть, этот способ пригоден для того, чтобы регулировать температуру Tr обратной линии до значения Tr,M, при этом при отклонении от этого значения выдается соответствующий сигнал е ошибки, который при увеличении расстояния от заданного значения становится больше или, соответственно, меньше. За счет более плоского профиля кривой между значениями Tr,min и Tr,max обеспечивается более точное регулирование до среднего значения Tr,M, чем это было бы возможно при более крутом профиле кривой, то есть профиле кривой с большей крутизной выше верхнего предела Tr,max и ниже нижнего предела Tr,min.
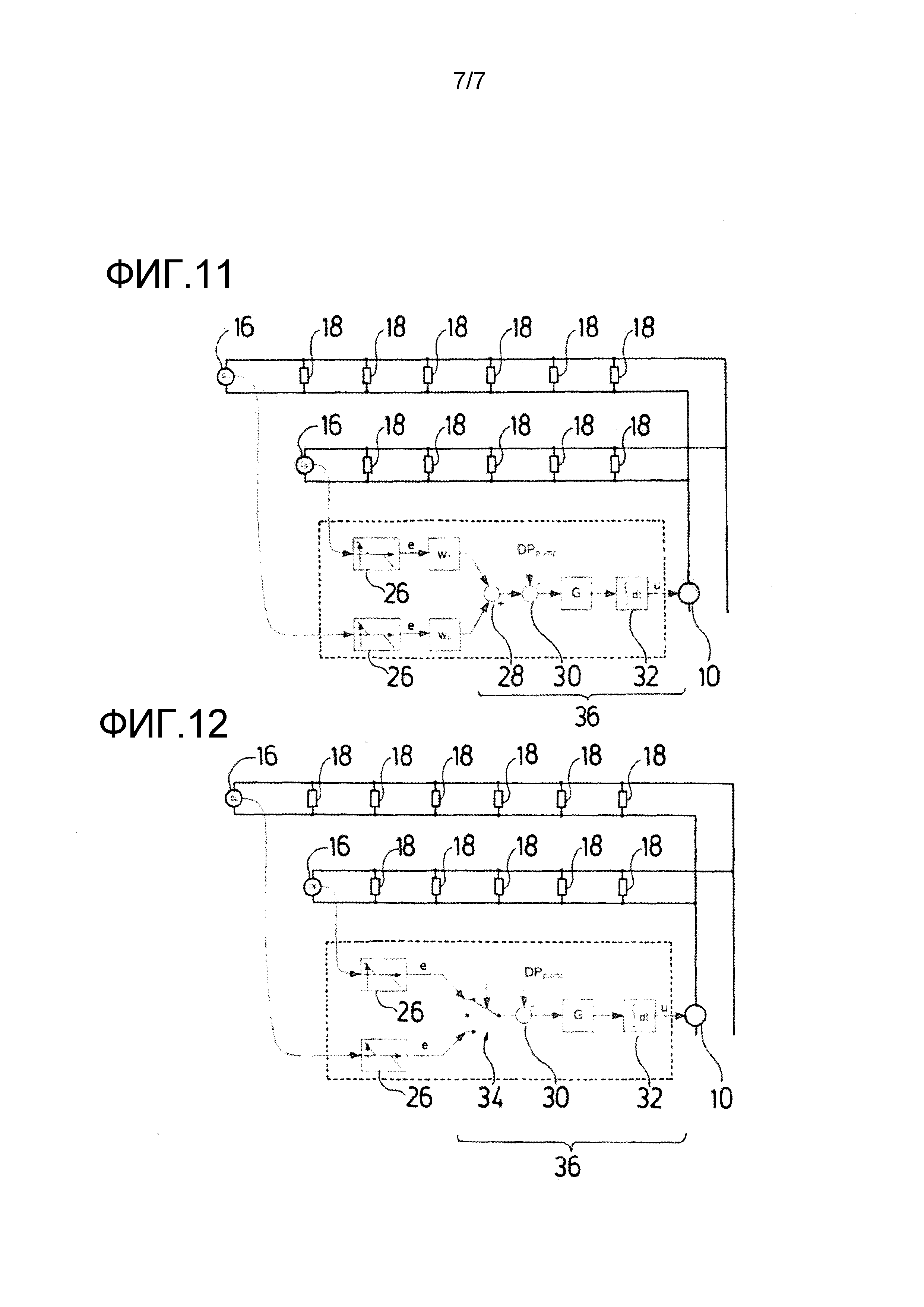
На основе фиг. 11 и 12 описываются теперь два варианта, каким образом сигнал е ошибки может оказывать воздействие на число оборотов насосного агрегата 10, 12. Примеры согласно фиг. 11 и 12 основываются на гидравлической системе, как она показана на фиг. 5. Однако следует понимать, что обработка выработанных сигналов е ошибки соответствующим образом может применяться также в других, в частности, ранее описанных гидравлических системах. В обоих примерах выполнения согласно фиг. 11 и 12, соответственно, сначала в устройстве 26 обработки сигнала обрабатывается выходной сигнал датчика 16 дифференциального давления, чтобы сформировать сигнал е ошибки вышеописанным образом. При этом предпочтительно с каждым датчиком 16 соотнесено собственное устройство 26 обработки сигнала, причем предпочтительным образом устройство 26 обработки сигнала с соответствующим датчиком образуют интегральный конструктивный узел. Устройство 26 обработки сигнала предпочтительно располагается вблизи датчика, то есть на расстоянии от насосного агрегата 10, так что только сигнал е ошибки передается к насосному агрегату. Функции, как они были описаны выше и загружены в устройство 26 обработки сигнала для формирования сигнала е ошибки, предпочтительно согласованы с характеристикой датчика или гидравлическим диапазоном, в котором находится датчик, так что сигнал е ошибки воспроизводит потребности в гидравлическом диапазоне, гидравлический диапазон, например, в отношении дифференциального давления Dp может регулироваться на заданное значение. При применении других подходящих датчиков, как они были описаны выше, сигнал е ошибки может также выдаваться таким образом, что поддерживается желательная степень открытия клапана, желательная температура и т.д.
В примере согласно фиг. 11 сигналы е ошибки отдельных датчиков 16 дифференциального давления суммируются. В приведенном примере показаны два датчика 16 дифференциального давления, однако понятно, что соответственно может применяться больше датчиков 16 дифференциального давления с соответствующими устройствами 26 обработки сигнала, причем для каждого датчика 16 дифференциального давления выдается собственный сигнал е ошибки. Также, наряду с датчиками 16 дифференциального давления, другие датчики, такие как, например, датчики температуры или датчики для регистрации степени открытия клапана или датчики расхода, могут совместно связываться, причем они тогда тоже имеют соответствующее устройство 26 обработки сигнала, которое выдает соответствующий сигнал е ошибки. В этом примере сигналы е ошибки дополнительно взвешиваются по-разному посредством весовых коэффициентов от w1 до wn, прежде чем они суммируются в сумматоре 28. В дополнительном сумматоре 30 затем суммируется сигнал DPpump, который является отрицательным, то есть сигнал DPpump вычитается. Сигнал DPpump соответствует изменению потребления мощности или энергопотребления в зависимости от контрольного сигнала и для насосного агрегата 10. На следующем этапе эта сумма умножается на коэффициент усиления G и затем интегрируется в интеграторе 32, так что выдается зависимый контрольный сигнал и для управления насосным агрегатом 10. Контрольный сигнал и может непосредственно соответствовать числу n оборотов насосного агрегата, а также величине h напора, то есть дифференциальному давлению на насосном агрегате 10, 12 или выходному давлению pout или выходному расходу qout насосного агрегата 10, 12. Если контрольный сигнал и не прямо соответствует числу n оборотов, то тем самым оказывается опосредованное воздействие на число оборотов, так как регулирование давления, например, осуществляется через число оборотов насосного агрегата 10, 12.
Согласно предыдущему примеру, изменение контрольного сигнала u вычисляется согласно следующему уравнению:
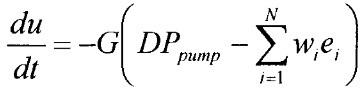
В этом уравнении одновременно достигается оптимизация относительно энергопотребления через сигнал DPpump, который может аппроксимироваться посредством постоянного значения. Вместо этого сигнала, оптимизация могла бы также осуществляться через постоянную следующим образом:
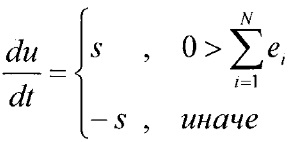
При этом значение s является постоянным коэффициентом, который в том случае положителен, когда сумма сигналов е ошибки по всему количеству N датчиков и/или выдающих сигнал блоков, таких как клапаны, меньше нуля. Постоянное значение - s выдается во всех иных случаях.
Согласно вышеописанной форме выполнения применялись дифференциальные давления. Однако понятно, что вместо этого также могут применяться дискретные версии, например, в форме следующих уравнений:
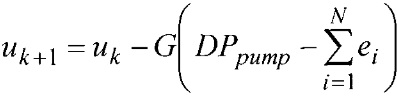
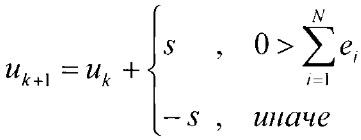
В этих уравнениях k - временной шаг. Коэффициенты G и s вновь являются постоянными.
Вместо того чтобы взвешивать сигналы е ошибки весовыми коэффициентами w, сигналы е ошибки могут, при необходимости, соответствующим образом суммироваться непосредственно без взвешивания. Вместо суммирования сигналов е ошибки может также осуществляться выбор, как описано с помощью фиг. 12. В примере согласно фиг. 12, в отличие от примера согласно фиг. 11, сумматор 26 заменен устройством 34 выбора. То есть, посредством устройства 34 выбора всегда выбирается сигнал е ошибки, который затем подается на сумматор 30. После сумматора 30 осуществляется дальнейшая обработка сигнала, как описано выше с помощью фиг. 11. Устройство 34 выбора может, например, выполняться таким образом, что, соответственно, выбирается сигнал е ошибки одного из датчиков в соответствии с заданным условием, таким как приоритизация. То есть, сначала выбирается сигнал е ошибки датчика с наивысшим приоритетом, а затем, при необходимости, выбирается сигнал ошибки одного или более датчиков с последующим приоритетом, если сигналы с предыдущих по приоритету датчиков равны нулю. Здесь могут применяться различные подходящие способы выбора. Также возможны другие приоритизации. Так отдельные датчики могут приоритизироваться в отношении их верхнего предела или их нижнего предела. Если, например, приоритет устанавливается по максимуму, то сигнал е ошибки этих датчиков был бы положительным, как показано в приведенных выше примерах. Так, могла бы, например, учитываться только сумма этих датчиков, у которых сигнал е ошибки положителен. Для случая, когда ни для одного из этих приоритизированных датчиков не превышен верхний предел, то есть не выдается положительный сигнал ошибки, то регулирование могло бы тогда выполняться на основе всех других, при необходимости, также отрицательных сигналов ошибки вышеописанным способом.
Элемент устройства регулирования, обозначенный ссылочной позицией 36 на фиг. 11 и 12, предпочтительно встроен в устройство регулирования насосного агрегата 10, 12, в то время как устройства 26 обработки сигнала предпочтительно ассоциированы с датчиками или соответственно встроены в них.
Реферат
Группа изобретений относится к способу регулирования для насосного агрегата (10, 12) в пневматической или гидравлической системе и насосному агрегату. В способе регулирования число оборотов насосного агрегата (10, 12) может регулироваться в зависимости от нескольких переменных, зарегистрированных в системе соответствующими датчиками или выдаваемых непосредственно исполнительными элементами в качестве параметра, характерного для их функционального состояния. Из зарегистрированных переменных каждый раз на основе кусочно-монотонной функции формируют сигналы ошибки. По меньшей мере несколько сигналов ошибки суммируют и регулирование числа оборотов насосного агрегата (10, 12) осуществляют на основе суммированных сигналов ошибки так, что суммарный сигнал ошибки приближается к значению, равному нулю. Группа изобретений направлена на то, чтобы при минимальном энергопотреблении насосного агрегата система снабжалась давлением так, чтобы клапанные элементы системы работали в оптимальном диапазоне регулирования. 2 н. и 17 з.п. ф-лы, 18 ил.
Комментарии