Способ синхронизации в системе сбора данных - RU2669012C2
Код документа: RU2669012C2
Чертежи



Описание
1. Перекрестные ссылки на родственные заявки
Настоящая заявка основана на и претендует на приоритет предварительной Заявки на выдачу патента США U.S. Provisional Application No. 61/951,885, которая была подана 12 марта 2015 г. и содержание которой включено сюда посредством ссылки во всей своей полноте.
2. Область техники, к которой относится изобретение
Настоящее изобретение относится к системам сбора данных, содержащим несколько устройств сбора данных.
Более конкретно, настоящее изобретение относится к способу синхронизации в такой системе обработки данных.
Настоящее изобретение может быть применено в первую очередь для синхронизации устройств сбора сейсмических данных, входящих в состав многопролетной сети в системе сбора сейсмических данных, но может представлять интерес и в какой-либо другой области, где требуется синхронизировать устройства сбора данных.
В одном из конкретных вариантов многопролетная сеть представляет собой сеть радиосвязи, а каждое устройство сбора данных является устройством радиосвязи, способным принимать и передавать пакеты данных посредством радио приемопередатчика. Однако в альтернативном варианте многопролетная сеть связи может быть проводной сетью связи.
3. Уровень техники
Ниже в этом документе будут рассмотрены проблемы, существующие в беспроводной системе сбора сейсмических данных. Настоящее изобретение, безусловно, не ограничивается этим конкретным приложением, а представляет интерес для любых способов обеспечения синхронизации в системах сбора данных, которые должны решать тесно связанные или сходные проблемы.
Первое известное решение описано в Заявке на выдачу патента США US 8228757 B2, озаглавленной «Синхронизация модулей в сети радиосвязи» ("Synchronization of modules in a wireless array"). Этот документ описывает способ синхронизации беспроводного модуля сбора данных в группе сейсмоприемников. Способ содержит:
- прием, в беспроводном модуле сбора данных, события-метки времени от отдельного компонента группы сейсмоприемников (как показано на Фиг. 3 этого документа, это событие-метка времени предоставляет опорный тактовый сигнал, приходящий либо от приемника системы глобального местоопределения GPS, соединенного с беспроводным модулем сбора данных, либо от какого-нибудь радиосигнала (радио события));
- определение величины задержки, ассоциированной с принятым событием-меткой времени, где эта величина задержки содержит задержку передачи, ассоциированную с прохождением такого события-метки времени от указанного отдельного компонента к рассматриваемому беспроводному модулю сбора данных; и
- подстройка системного тактового сигнала в беспроводном модуле сбора данных на основе указанной величины задержки, чтобы синхронизировать этот системный тактовый сигнал относительно события-метки времени (т.е. с опорным тактовым сигналом).
В конкретном варианте, рассматриваемом в настоящем документе, приемник GPS включают в первый момент, чтобы синхронизировать системный тактовый сигнал беспроводного модуля сбора данных с принятым (и связанным с опорным тактовым сигналом) сигналом точного времени GPS, после чего выключают этот приемник. В последующем для управления системным тактовым сигналом в беспроводном модуле сбора данных используются события-метки времени, полученные из радио событий (и связанные со вторым опорным тактовым сигналом), для продолжения синхронизации системного тактового сигнала, так что приемник GPS может оставаться выключенным для экономии заряда аккумулятора.
Подстроенный тактовый сигнал первого беспроводного модуля сбора данных может быть использован для генерации исходящего опорного сигнала (сверх второго опорного тактового сигнала), передаваемого затем второму беспроводному модулю сбора данных, который, в свою очередь, может выполнить соответствующую процедуру, как описано выше. Это позволяет распространять события-метки времени по всей системе, чтобы все беспроводные модули сбора данных в системе имели синхронные тактовые сигналы.
Второе известное решение описано в международной заявке WO 2005029131 A2, под заглавием «Способ и аппаратура для сбора и передачи сейсмических данных по радио с использованием одного сейсмоприемника» ("Single station wireless seismic data acquisition method and apparatus"). В одном из вариантов беспроводное устройство сбора данных (также именуемое «беспроводной измерительной станцией» ("wireless sensor station")) содержит приемник GPS и ассоциированную антенну. В этом варианте показано, что приемник GPS соединен с процессором и тактовым генератором для предоставления параметров местонахождения с целью корреляции сейсмической информации и синхронизации сбора данных. В альтернативном варианте параметры местонахождения можно передавать центральному контроллеру и сохранять в нем, а синхронизация может быть осуществлена путем передачи сигналов по радиолинии ОВЧ/УВЧ диапазона независимо от GPS.
Третье известное решение описано в заявке на выдачу патента США US 20050047275 A1 под названием «Синхронизация и определение местонахождения в системах сбора сейсмических данных» ("Synchronization and positioning of seismic data acquisition systems"). В сеть беспроводных устройств сбора данных (также именуемых «удаленные модули сбора данных» ("remote acquisition modules (RAM)")) добавлены ведущий тактовый сигнал сети и один или несколько дополнительных высокоточных тактовых сигналов. Синхронизации в сети связи осуществляется в два этапа. Сначала производится синхронизация высокоточных тактовых сигналов по всей сети связи, а затем выполняется синхронизация остальных тактовых сигналов. Генераторы высокоточных тактовых сигналов могут располагаться внутри или вне удаленных модулей сбора данных (RAM) и модулей чтения сигналов с линий связи (Line tap unit (LTU)). В одном из конкретных вариантов высокоточный тактовый генератора содержит собственно генератор меньшей точности, например, имеет нестабильность частоты 0,5×10-6, но в этом случае модуль высокоточного тактового генератора использует приемник GPS или сигналы радиомаяков для достижения высокой точности. В этом конкретном варианте обладающие высокой точностью сигналы точного времени системы GPS или сигналы радиомаяков используются для непрерывной коррекции дрейфа менее прецизионного тактового генератора, вследствие чего модуль высокоточного тактового генератора добивается высокой точности. Есть два типа удаленных модулей сбора данных: а именно модули сбора данных, содержащие модули высокоточных тактовых генераторов, и модули сбора данных без таких тактовых генераторов. Описаны три разных механизма для синхронизации высокоточных тактовых генераторов: 1) синхронизация перед развертыванием на месте сбора данных, 2) синхронизация после развертывания на месте сбора данных с использованием прямых передач и 3) синхронизация после развертывания на месте сбора данных посредством многократных синхронизационных передач. Удаленные модули сбора данных, не имеющие модулей высокоточных тактовых генераторов, синхронизируют с удаленными модулями сбора данных, обладающими такими модулями высокоточных тактовых генераторов: каждый из удаленных модулей сбора данных принимает синхросигнал от соседнего удаленного модуля сбора данных, находящегося с одной физической стороны от рассматриваемого модуля, и передает этот синхросигнал другому удаленному модулю сбора данных, находящемуся с другой физической стороны от этого модуля. При таком подходе синхросигнал доходит до всех удаленных модулей сбора данных, соединенных с сетью связи. Когда удаленный модуль сбора данных, имеющий высокоточный тактовый сигнал, принимает синхросигнал, он корректирует этот синхросигнал перед тем, как передать его дальше.
Однако ни одно из указанных выше первого, второго и третьего решений не рассматривает проблему выбора источника тактового сигнала (т.е. опорного тактового сигнала), когда конкретный модуль сбора данных может принимать сигналы от нескольких опорных тактовых генераторов, например:
- сигналы от приемника (приемника глобальной спутниковой навигационной системы (GNSS) или приемника сигналов синхронизационного маяка), входящего в состав или соединенного с этим конкретным модулем сбора данных, и/или
- сигнала от одного или нескольких других модулей сбора данных (как в случае, в частности, многопролетной сети радиосвязи).
Эта проблема является критически важной, поскольку условия могут изменяться с течением времени, так что рассматриваемый конкретный модуль сбора данных не всегда принимает одни и те же опорные тактовые сигналы. Например, приемник сигналов системы GNSS может не получать внешнего синхросигнала из-за неблагоприятных условий среды и в этом случае не может передавать сигналы точного времени системы GNSS рассматриваемому модулю сбора данных.
Эта проблема является критически важной еще и потому, что в системе сбора данных (в частности, в беспроводной системе сбора сейсмических данных) имеющей, например, 50 модулей сбора данных или более, требуются несколько ведущих тактовых модулей. Такой ведущий тактовый модуль определен как модуль сбора данных, синхронизированный с использованием своей внутреннего приемника системы GNSS (или приемника сигналов синхронизационного маяка) и предоставляющий сигналы точного времени другим модулям сбора данных в системе.
4. Сущность изобретения
Конкретный вариант настоящего изобретения предлагает способ обеспечения синхронизации в системе сбора данных, содержащей несколько устройств сбора данных и отличающейся тем, что конкретное устройство сбора данных из совокупности нескольких таких устройств выполняет следующие этапы:
- прием пакета данных от другого устройства системы сбора данных;
- выделение информации о точности синхронизации и информации об опорном тактовом сигнале из этого пакета;
- получение первого опорного тактового сигнала в функции от выделенной информации об опорном тактовом сигнале;
- если выделенная информация о точности синхронизации указывает более высокую точность синхронизации, чем информация о текущей точности синхронизации, ассоциированная с рассматриваемым устройством сбора данных:
- принятие полученного первого опорного тактового сигнала в качестве выбранного опорного тактового сигнала; и
- обновление информации о текущей точности синхронизации с целью указания более низкой точности синхронизации, чем выделенная информация о точности синхронизации.
Общий принцип состоит в применении механизма распределенного самоконфигурирования: конкретное рассматриваемое устройство сбора данных выбирает себя (не требуя для этого какого-либо шлюза или какой-нибудь центральной станции) и динамически выбирает опорный тактовый сигнал в зависимости от результатов сравнения выделенной информации о точности синхронизации с текущей информацией о точности синхронизации. Таким образом, рассматриваемое устройство сбора данных легко выбирает опорный тактовый сигнал, даже если имеется несколько возможных опорных тактовых сигналов. Рассматриваемое устройство сбора данных может принимать эти один или несколько опорных тактовых в составе пакетов данных, приходящих от одного или нескольких источников тактовых сигналов.
Согласно одному из конкретных признаков изобретения, если выделенная информация о точности синхронизации не показывает более высокой точности синхронизации, чем текущая информация о точности синхронизации, рассматриваемое устройство сбора данных продолжает использовать ранее выбранный опорный тактовый сигнал.
Таким образом, выбранный опорный тактовый сигнал всегда является наилучшим опорным сигналом.
Согласно одному из конкретных признаков настоящего изобретения рассматриваемое устройство сбора данных выполняет следующие этапы:
- прием, от приемника, входящего в состав рассматриваемого устройства сбора данных, второго опорного тактового сигнала;
- принятие этого второго опорного тактового сигнала в качестве выбранного опорного тактового сигнала; и
- обновление текущей информации о точности синхронизации для индикации максимальной точности синхронизации.
Таким образом, один из возможных опорных тактовых сигналов (из совокупности таких сигналов, используемых описанным выше механизмом распределенного самоконфигурирования) является «локальным опорным тактовым сигналом», т.е. опорным тактовым сигналом, приходящим от приемника, входящего в состав рассматриваемого устройства сбора данных или соединенного с этим устройством. Когда доступен такой «локальный опорный тактовый сигнал», выбирают его, поскольку это очень точный тактовый сигнал.
Согласно одному из конкретных признаков настоящего изобретения указанный приемник представляет собой радиоприемник из категории приемников сигналов спутниковой навигационной системы или категории приемников сигналов синхронизационного маяка.
Этот перечень не является исчерпывающим. Здесь могут быть использован также приемники других типов, позволяющие получить очень точный тактовый сигнал.
Согласно одному из конкретных признаков настоящего изобретения рассматриваемое устройство сбора данных выполняет следующий этап: обновление текущей информации о точности синхронизации, путем ухудшения параметра точности, если эта информация не обновлялась в течение заданного периода времени.
Таким образом, рассмотренный механизм распределенного самоконфигурирования учитывает изменение текущей информации о точности синхронизации во времени (снижение точности в отсутствие обновлений).
Согласно одному из конкретных признаков настоящего изобретения рассматриваемое устройство сбора данных выполняет следующий вспомогательный этап: передачу выбранного опорного тактового сигнала в блок сбора данных, входящий в состав этого устройства сбора данных.
Таким образом, блок сбора данных оказывается синхронизирован с выбранным опорным тактовым сигналом.
Согласно одному из конкретных признаков настоящего изобретения указанное другое устройство, от которого рассматриваемое устройство сбора данных принимает пакет данных, представляет собой другое устройство сбора данных из указанной совокупности нескольких устройств или базовую станцию.
Таким образом, посредством принимаемых пакетов рассматриваемое устройство сбора данных может принимать опорные тактовые сигналы от различных источников синхронизации (т.е. от разных устройств в системе сбора данных).
Согласно одному из конкретных признаков настоящего изобретения рассматриваемое устройство сбора данных выполняет следующий вспомогательный этап:
- вставлять в пакет данных, который нужно передать, обновленную текущую информацию о точности синхронизации и информацию об опорном тактовом сигнале, относящуюся к выбранному опорному тактовому сигналу.
Таким образом, рассматриваемое устройство сбора данных может действовать в качестве «ведущего тактового модуля» для одного или нескольких других устройств сбора данных, которые принимают пакеты, передаваемые рассматриваемым устройством сбора данных, в предположении, что информация о точности синхронизации, передаваемая рассматриваемым устройством сбора данных, указывает на более высокую точность синхронизации, чем текущая информация о точности синхронизации, ассоциированная с одним или несколькими другими устройствами сбора данных.
Согласно одному из конкретных признаков настоящего изобретения обновленная текущая информация о точности синхронизации, вставляемая в пакет данных, который нужно передать, зависит по меньшей мере от одного из следующих параметров:
- числа пролетов, которые прошел пакет от момента первоначальной передачи от источника ведущего тактового сигнала и до момента, когда этот был передан дальше от рассматриваемого устройства сбора данных, в многопролетной сети связи, содержащей источник ведущего тактового сигнала и рассматриваемое устройство сбора данных;
- текущей информации о точности синхронизации, ассоциированной с указанным другим устройством, от которого рассматриваемое устройство сбора данных ранее приняло обсуждаемый пакет данных;
- радио характеристиками обсуждаемого пакета, принятого от указанного другого устройства в рассматриваемом устройстве сбора данных; и
- продолжительности промежутка времени, истекшего с момента, когда рассматриваемое устройство сбора данных приняло последний из предшествующих пакетов данных от указанного другого устройства.
Этот перечень не является исчерпывающим. Один или несколько из перечисленных параметров могут быть использованы в сочетаниях один с другими.
В одном из конкретных вариантов рассматриваемое устройство сбора данных представляет собой устройство, принадлежащее многопролетной сети связи, содержащей несколько таких устройств сбора данных.
В одном из конкретных вариантов рассматриваемое устройство сбора данных представляет собой беспроводное устройство, осуществляющее прием и передачу пакетов данных через радио приемопередатчик.
В одном из конкретных вариантов указанные несколько устройств сбора данных представляют собой несколько устройств сбора сейсмических данных (сейсмоприемников), а указанная система сбора данных является системой сбора сейсмических данных.
В другом варианте настоящее изобретение относится к компьютерному программному продукту, содержащему команды программного кода для осуществления описанного выше способа (или какого-либо из различных вариантов этого способа), когда программу выполняет компьютер или процессор.
В другом варианте настоящее изобретение относится к энергонезависимому компьютерному носителю записи, сохраняющему программу, при выполнении которой компьютером или процессором этот компьютер или процессор осуществляет описанный выше способ (или какой-либо из различных вариантов этого способа).
В другом варианте настоящее изобретение относится к устройству сбора данных, содержащему:
- средства для приема пакета данных от другого устройства в системе сбора данных;
- средства для выделения информации о точности синхронизации и информации об опорном тактовом сигнале из принятого пакета данных;
- средства для получения первого опорного тактового сигнала в функции выделенной информации об опорном тактовом сигнале;
- следующие средства, активизируемые, если выделенная информация о точности синхронизации указывает более высокую точность синхронизации, чем текущая информация о точности синхронизации, ассоциированная с рассматриваемым устройством сбора данных:
- средства для принятия полученного первого опорного тактового сигнала в качестве выбранного опорного тактового сигнала; и
- средства для обновления текущей информации о точности синхронизации для индикации более низкой точности синхронизации, чем выделенная информация о точности синхронизации.
Предпочтительно устройство сбора данных содержит средства для осуществления этапов описанного выше способа в каком-либо из его разнообразных вариантов.
5. Краткое описание чертежей
Другие признаки и преимущества вариантов настоящего изобретения станут ясны из последующего описания, данного на иллюстративных и неограничивающих примерах и из прилагаемых чертежей, на которых:
- Фиг. 1 представляет блок-схему, показывающую упрощенную структуру беспроводного устройства сбора сейсмических данных согласно одному из конкретных вариантов настоящего изобретения;
- Фиг. 2-5 представляют логические схемы одного из конкретных вариантов способа синхронизации согласно настоящему изобретению;
- Фиг. 6A, 6B и 6C иллюстрируют последовательные этапы примера распространения синхронизации в многопролетной беспроводной сети сбора сейсмических данных согласно одному из конкретных вариантов настоящего изобретения; и
- Фиг. 7 показывает структуру сообщения (или пакета данных) согласно одному из конкретных вариантов настоящего изобретения.
6. Подробное описание изобретения
На всех чертежах в настоящем документе аналогичным элементам и этапам присвоены одинаковые цифровые позиционные обозначения.
В последующем описании мы рассматриваем, только в иллюстративных целях, случай беспроводного устройства сбора сейсмических данных, принадлежащего многопролетной сети радиосвязи в беспроводной системе сбора сейсмических данных. Как уже отмечено выше, настоящее изобретение не ограничивается этим конкретным случаем, а может представлять интерес в любой области техники (не только в сейсмологии), где нужна синхронизация устройств сбора данных (проводных или беспроводных).
В конкретном варианте настоящего изобретения, показанном на Фиг. 1, беспроводное устройство 10 сбора сейсмических данных содержит контроллер 11, радио приемопередатчик 12, прием 13 сигналов GNSS ("глобальная спутниковая навигационная система"), блок 14 сбора данных, запоминающее устройство 15 и переключающий блок 16.
Приемник GNSS 13 передает первый опорный тактовый сигнал 17, связанный с "опорным тактовым сигналом GNSS", контроллеру 11 и переключающему блоку 16. В альтернативном. варианте приемник 13 GNSS заменен приемником сигналов синхронизационного маяка.
Опорный тактовый сигнал может представлять собой:
- непрерывный тактовый сигнал или
- тактовый сигнал в виде пачек (если приложение не нуждается в непрерывном тактовом сигнале, тактовый сигнал в виде пачек представляет собой средство для уменьшения потребления энергии, если этот признак является критическим).
Контроллер 11 управляет различными блоками беспроводного устройства 10 сбора сейсмических данных:
- он контролирует состояние приемника GNSS 13 и принимает опорный тактовый сигнал GNSS 17;
- он управляет радио приемопередатчиком 12 с целью приема и передачи радиосообщений;
- он формирует второй опорный тактовый сигнал 18, называемый «программным опорным тактовым сигналом», на основе радиосообщений, принятых посредством радио приемопередатчика 12;
- он управляет переключающим блоком 16 посредством селекторного сигнала 19 (именуется также «выбор источника опорного тактового сигнала»), чтобы выбрать один из двух сигналов, получаемых переключающим блоком 16 (а именно - опорный тактовый сигнал GNSS 17 или программный опорный тактовый сигнал 18). Выбранный опорный тактовый сигнал 192 передают в блок 14 сбора данных;
- он сохраняет в запоминающем устройстве 15 синхронизированные сейсмические данные 191, поступающие от блока 14 сбора данных.
Блок 14 сбора данных выполняет отсчеты сигнала в одном или нескольких входных каналах (каждый из которых соединен с одним или несколькими сейсмическими датчиками 193) и затем применяет интерполяционный фильтр в соответствии с фазой выбранного опорного тактового сигнала 192. Другими словами, блок 14 сбора данных синхронизируется с выбранным опорным тактовым сигналом, т.е. либо с опорным тактовым сигналом GNSS 17 (генерируемым приемником GNSS 13), либо с программным опорным тактовым сигналом 18 (генерируемым контроллером 11 на основе сообщений, принимаемых от других устройств). Этот блок 14 сбора данных передает полученные им синхронизированные сейсмические данные 191 процессору 11. В альтернативном варианте датчики 193 встроены в беспроводное устройство 10 сбора сейсмических данных.
Радио приемопередатчик 12 осуществляет связь, т.е. обменивается сообщениями (также именуемыми пакетами данных) с другими устройствами многопролетной сети радиосвязи, например, с базовой станцией, либо с одним или несколькими соседними с ним беспроводными устройствами сбора сейсмических данных.
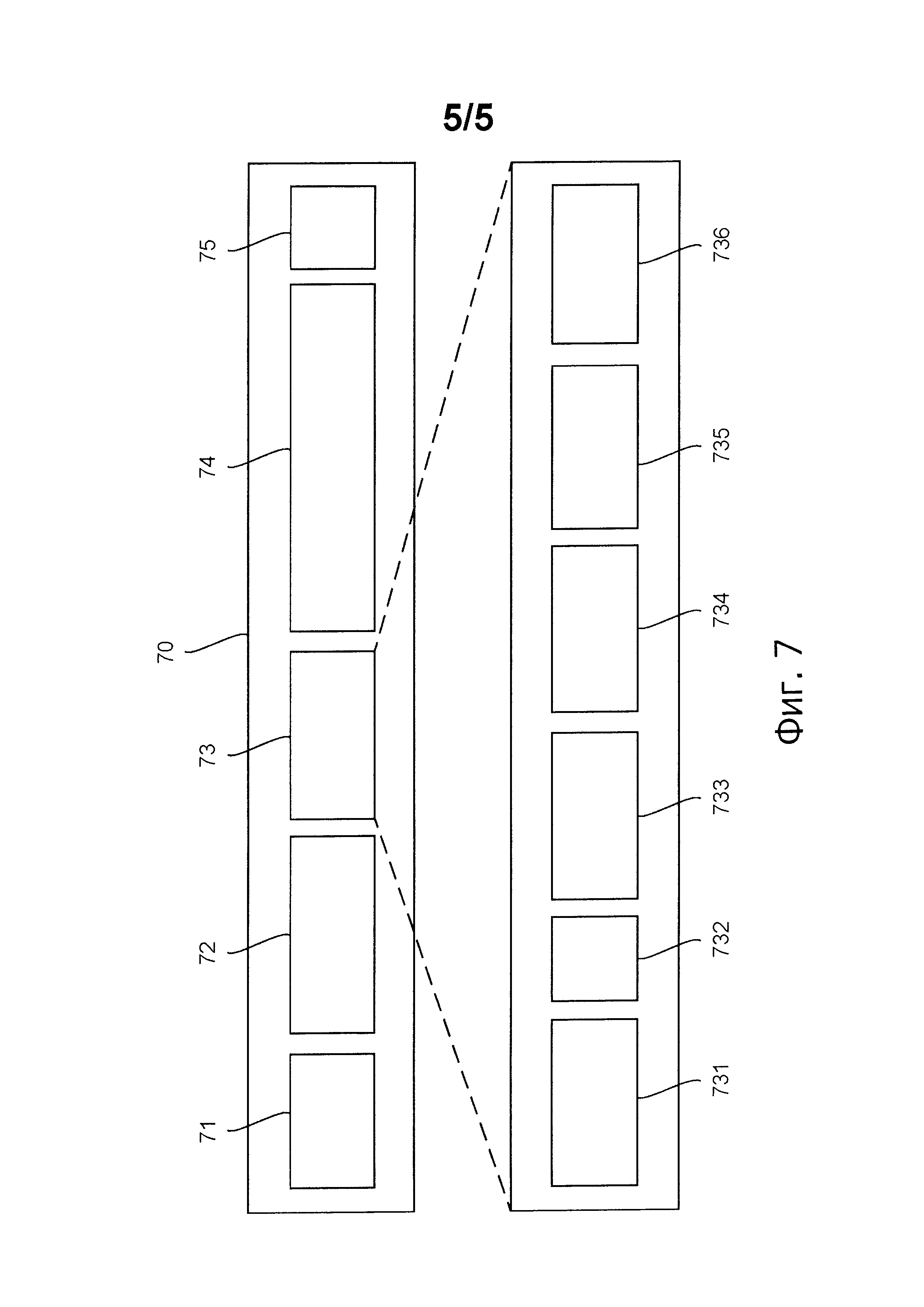
На Фиг. 7 показана структура сообщения (или пакета данных) 70 в одном из конкретных вариантов настоящего изобретения. Сообщение содержит преамбулу 71, синхронизационное слово 72, заголовок 73 пакета данных, собственно данные 74 и поле 75 CRC (циклически избыточный контрольный код ("Cyclic Redundancy Check")).
Заголовок 73 пакета данных содержит поле 731 длины, поле 732 управления ("ctrl"), поле 733 адреса пункта назначения ("@ dest"), поле 734 адреса источника сообщения ("@ src"), поле 735 точности синхронизации ("Synchro Accuracy") и поле 736 даты передачи ("Тх Date").
В одном из конкретных вариантов поле 735 "Synchro Accuracy" точности синхронизации сообщения (или пакета данных), переданного рассматриваемым беспроводным устройством сбора сейсмических данных, содержит число пролетов, которые прошло это сообщение от момента первоначальной передачи источником ведущего тактового сигнала до момента передачи дальше в сеть рассматриваемым устройством сбора данных в многопролетной сети радиосвязи. Источник ведущего тактового сигнала представляет собой, например, базовую станцию или другое беспроводное устройство сбора сейсмических данных, содержащее приемник сигналов системы GNSS, способный предоставлять прецизионное значение системного времени GNSS. Этот конкретный вариант проиллюстрирован ниже со ссылками на Фиг. 3A-3C.
В альтернативном варианте поле 735 "Synchro Accuracy" точности синхронизации сообщения (или пакета данных), переданного рассматриваемым беспроводным устройством сбора сейсмических данных, зависит от одного или нескольких следующих параметров (в дополнение или вместо ранее описанного параметра, т.е. числа пролетов):
- текущей информации о точности синхронизации, ассоциированной с другим устройством (например, базовой станцией или другим беспроводным устройством сбора сейсмических данных), от которого рассматриваемое беспроводное устройство сбора сейсмических данных перед этим приняло сообщение (или пакет данных);
- радио характеристик (например, скорости передачи данных, вида модуляции, отношения сигнал/шум, …) указанного сообщения (или пакета данных), принятого, от указанного выше другого устройства рассматриваемым беспроводным устройством сбора сейсмических данных; и
- промежутка времени, истекшего от момента поступления последнего предшествующего сообщения (или пакета данных), принятого от указанного выше другого устройства рассматриваемым беспроводным устройством сбора сейсмических данных.
Возвращаясь, к Фиг. 1, когда принято сообщение (или пакет данных), радио приемопередатчик 12 направляет его контроллеру 11 вместе с временным импульсом, синхронным с концом синхронизационного слова 72 из состава этого сообщения. Контроллер 11 выделяет и обрабатывает поле 736 "Тх Date" даты этого сообщения с радио характеристиками, чтобы определить значение времени. Контроллер 11 может на основе этого найденного значения времени может сформировать внутренний «программный опорный тактовый сигнал" 18. Контроллер 11 выделяет также поле 735 "Synchro Accuracy" этого сообщения и использует его в качестве входного параметра для алгоритмов, рассматриваемых далее со ссылками на Фиг. 2-5.
Когда нужно передать сообщение, контроллер 11 направляет его радио приемопередатчику 12, а радио приемопередатчик 12 формирует временной импульс, синхронный с началом синхронизационного слова 72 в этом сообщении. В поле 736 "Тх Date" даты в этом сообщении вписывают значение времени, предоставляемое выбранным опорным тактовым сигналом 192 (т.е. с информацией об опорном тактовом сигнале). В поле 735 "Synchro Accuracy" в этом сообщении вписывают текущую информацию о точности синхронизации, получаемую в результате выполнения алгоритмов, описываемых далее со ссылками на Фиг. 2-5.
Контроллер 11 содержит энергонезависимое запоминающее устройство 111 (например, постоянное запоминающее устройство (ПЗУ (ROM)) или жесткий диск), энергозависимое запоминающее устройство 112 (например, запоминающее устройство с произвольной выборкой (ЗУПВ (RAM))) и процессор 110. Энергонезависимое запоминающее устройство 111 представляет собой энергонезависимый компьютерный носитель записи. Он сохраняет выполняемые команды программного кода, исполняемые процессором 110, чтобы можно было реализовать способ синхронизации, рассматриваемый ниже (алгоритмы, описываемые далее со ссылками на Фиг. 2-5). После инициализации указанные выше команды программного кода передают из энергонезависимого запоминающего устройства 111 в энергозависимое запоминающее устройство 112 для выполнения процессором 110. Энергозависимое запоминающее устройство 12 аналогично содержит регистры для хранения переменных и параметров, необходимых для выполнения программного кода.
Все этапы способа синхронизации могут быть реализованы одинакового успешно:
- посредством выполнения набора команд программного кода, исполняемых перепрограммируемым вычислительным устройством, таким как устройство типа персонального компьютера, цифровой процессор сигнала (DSP (digital signal processor)) или микроконтроллер. Эти команды программного кода могут храниться на энергонезависимом компьютерном носителе записи - съемном (например, дискета, диск CD-ROM или диск DVD-ROM) или несъемном; или
- посредством специализированной машины или компонента, такого как программируемая пользователем вентильная матрица (FPGA (Field Programmable Gate Array)), специализированная интегральная схема (ASIC (Application-Specific Integrated Circuit)) или какой-либо специализированный аппаратный компонент.
Другими словами, настоящее изобретение не ограничивается чисто программными вариантами реализации в форме компьютерных программных команд, а также может быть реализовано в аппаратной форме или в виде какого-либо сочетания аппаратной части и программной части.
На Фиг. 2-5 представлены логические схемы одного из конкретных вариантов способа синхронизации согласно настоящему изобретению.
Фиг. 2 показывает подробности первого алгоритма выполняемого рассматриваемым беспроводным устройством 10 сбора сейсмических данных 10, и более точно - его контроллером 11.
На этапе 21 контроллер 11 принимает пакет данных (или сообщение) от другого устройства в системе сбора данных (например, от базовой станции или от другого беспроводного устройства сбора сейсмических данных).
На этапе 22 контроллер 11 выделяет информацию о точности синхронизации из поля "Synchro Accuracy" в составе принятого пакета данных и информацию об опорном тактовом сигнале из поля "Тх Date".
На этапе 23 контроллер 11 проверяет, указывает ли выделенная информация о точности синхронизации более высокую точность синхронизации, чем текущая информация о точности синхронизации, ассоциированная с рассматриваемым устройством сбора данных. Если информация о точности синхронизации представляет собой число пролетов (отмеченный выше конкретный вариант), тогда слова «более высокая точность синхронизации» означают меньшее число «пролетов».
В случае положительного ответа на этапе 23, контроллер 11 выполняет следующие этапы:
- этап 24: получение программного опорного тактового сигнала 18 в функции выделенной информации об опорном тактовом сигнале (в альтернативном варианте этап 24 выполняют между этапами 22 и 23);
- этап 25: принятие полученного программного опорного тактового сигнала в качестве выбранного опорного тактового сигнала и передача его в блок 14 сбора данных. С этой целью контроллер 11 управляет переключающим блоком 16 посредством селекторного сигнала 19 («выбор источника опорного тактового сигнала»), чтобы выбрать программный опорный тактовый сигнал 18; и
- этап 26: обновление текущей информации о точности синхронизации с целью индикации более низкой точности синхронизации, чем выделенная информация о точности синхронизации. Например, увеличение значения на одну единицу, если выделенная информация о точности синхронизации представляет собой число пролетов.
В случае отрицательного ответа на этапе 23 контроллер 11 выполняет этап 27, на котором он сохраняет предшествующий выбранный опорный тактовый сигнал 192 (т.е. либо программный опорный тактовый сигнал, либо опорный тактовый сигнал GNSS) и передает его в блок 14 сбора данных.
На Фиг. 3 показаны подробности второго алгоритма, выполняемого беспроводным устройством 10 сбора сейсмических данных и более точно - его контроллером 11.
На этапе 31 контроллер принимает от радио приемопередатчика 12 опорный тактовый сигнал GNSS 17.
На этапе 32 контроллер управляет переключающим блоком 16 посредством селекторного сигнала 19 («выбор источника опорного тактового сигнала»), чтобы выбрать опорный тактовый сигнал GNSS и передать его (в качестве выбранного опорного тактового сигнала 192) в блок 14 сбора данных.
На этапе 33 контроллер 11 обновляет текущую информацию о точности синхронизации с целью индикации максимальной точности синхронизации. Например, он обновляет эту информацию путем присвоения ей значения «0», если выделенная информация о точности синхронизации представляет собой число пролетов.
На Фиг. 4 показаны подробности третьего алгоритма, выполняемого беспроводным устройством 10 сбора сейсмических данных и более точно - его контроллером 11.
На этапе 41 контроллер 11 проверяет, была ли текущая информация о точности синхронизации обновлена в течение заданного периода времени Т.
Если на этапе 41 оказалось, что обновления не было, контроллер 11 выполняет этап 42, на котором он обновляет текущую информацию о точности синхронизации посредством ее ухудшения.
Например, продолжительность заданного периода времени Τ зависит от стабильности частоты термокомпенсированного кварцевого генератора ТСХО, входящего в состав беспроводного устройства 10 сбора сейсмических данных. Стабильность частоты недорого маломощного генератора ТСХО обычно находится в пределах 0,5×10-6, но может быть улучшена до 0,05×10-6, если калибровать частоту генератора ТСХО. В этом случае, если выделенная информация о точности синхронизации представляет собой число пролетов, текущую информацию о точности синхронизации ухудшают каждые 20 с (путем увеличения значения на единицу), что эквивалентно уменьшению точности величины точного времени на 1 мкс через каждые 20 с.
Если на этапе 41 оказалось, что обновление проведено было, контроллер 11 возвращается к этапу 41 для следующей проверки.
На Фиг. 5 показаны подробности четвертого алгоритма, выполняемого беспроводным устройством 10 сбора сейсмических данных и более точно - его контроллером 11.
На этапе 51, для рассматриваемого конкретного пакета данных, которые нужно передать, контроллер 11 вставляет:
- в поле 735 "Synchro Accuracy" - обновленную текущую информацию о точности синхронизации, полученную в результате выполнения последнего этапа обновления (из совокупности этапов 26 (Фиг. 2), 33 (Фиг. 3) и 42 (Фиг. 4)); и
- в поле 736 "Тх Date" - информацию об опорном тактовом сигнале, относящуюся к выбранному на текущий момент опорному тактовому сигналу, полученному в результате выполнения последнего этапа выбора (из совокупности этапов 25 (Фиг. 2) и 32 (Фиг. 3)).
На этапе 52 контроллер 11 направляет рассматриваемый конкретный пакет радио приемопередатчику 12, который передает этот пакет данных.
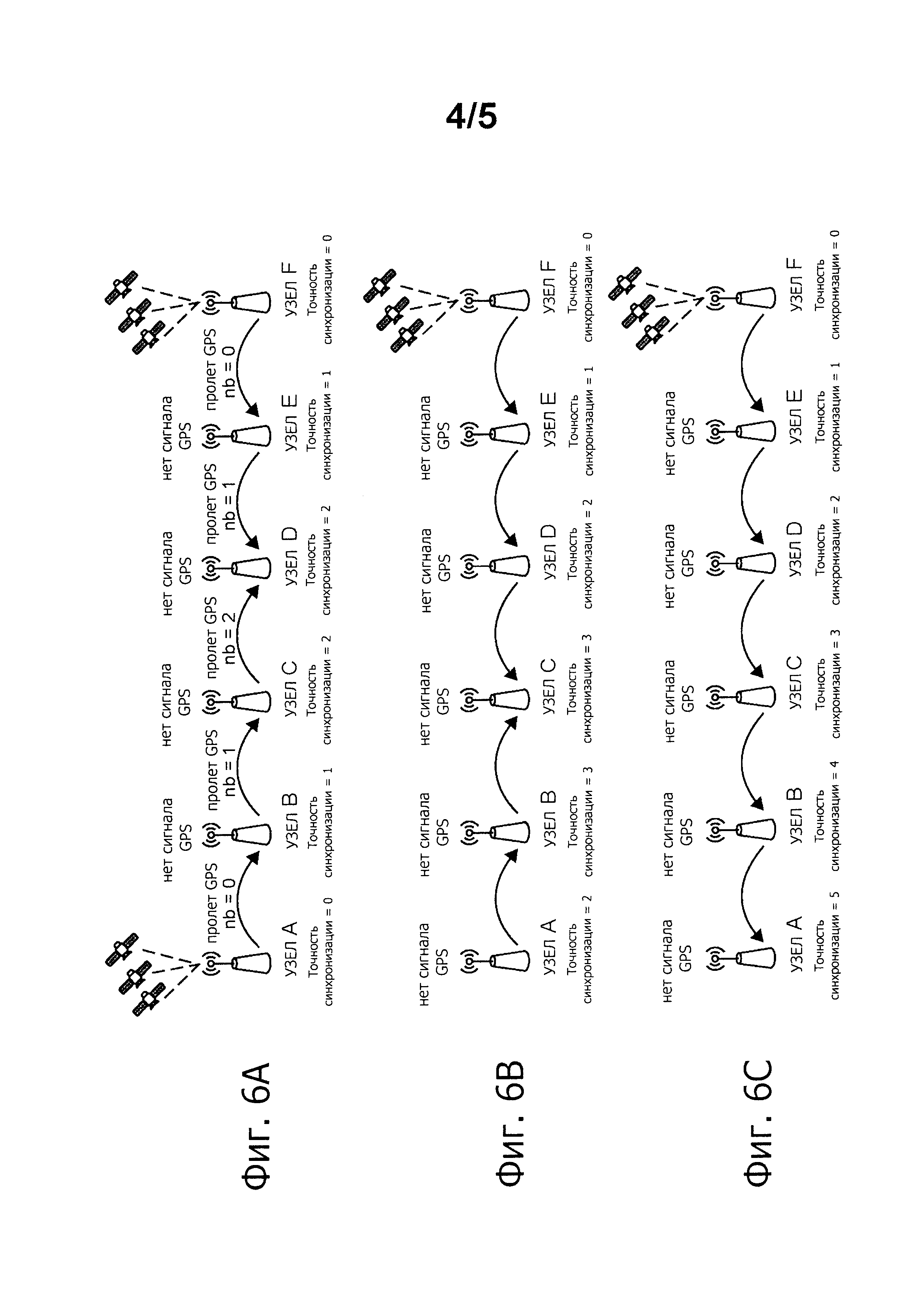
Фиг. 6A, 6B и 6C иллюстрируют последовательные этапы распространения синхронизации в многопролетной беспроводной сети сбора сейсмических данных согласно одному из конкретных вариантов настоящего изобретения.
Узлы A, B, C, D, E и F обозначают беспроводные устройства сбора данных в многопролетной сети радиосвязи. Эти узлы должны синхронизироваться по времени системы GNSS.
В этом примере, и как показано на Фиг. 6A, предполагается, что в первый момент приемники GNSS только в узлах A и F имеют захват (т.е. способны предоставлять время системы GNSS). Таким образом, узлы A и F самоконфигурируются в качестве источников ведущего тактового сигнала, т.е. каждый из них выбирает опорный тактовый сигнал GNSS. Приемники GNSS в узлах B, C, D и E не имеют захвата из-за неблагоприятных условий среды связи, вследствие чего каждому из этих узлов приходится синхронизироваться через свой радио приемопередатчик.
Предполагается также, что каждый из этих узлов регулярно передает в режиме вещания пакеты данных, такие как пакеты приветствия ("Hello") или одноадресные пакеты, в многопролетной сети радиосвязи.
Когда узел A передает пакет данных в узел B, этот узел A вписывает «0» (максимальное значение точности) в поле "Synchro Accuracy" этого пакета, а в поле "Тх Date" вписывает оценочное значение времени по сигналу системы GNSS. Узел В определяет время по сигналу системы GNSS посредством обработки поля "Тх Date" в принятом пакете данных вместе с радио характеристиками. Таким образом, узел В может сам сформировать в своей аппаратуре программный опорный тактовый сигнал на основе пакета данных, принятого от узла A, и передать этот сигнал своему блоку сбора данных. Более того величину параметра текущей точности синхронизации для узла B принимают равной "точность синхронизации для узла A (т.е. величина в поле "Synchro Accuracy" пакета данных, принятого от узла А)" +1=1.
Когда узел B передает пакет данных узлу C, этот узел B вписывает «1» в поле "Synchro Accuracy" этого пакета, а также вписывает оценочное значение времени по сигналу системы GNSS в поле "Тх Date". Узел C определяет время по сигналу системы GNSS посредством обработки поля "Тх Date" принятого пакета данных вместе с радио характеристиками. Таким образом, узел C может сам сформировать в своей аппаратуре программный опорный тактовый сигнал на основе пакета данных, принятого от узла B, и передать этот сигнал своему блоку сбора данных. Более того величину параметра текущей точности синхронизации для узла С принимают равной "точность синхронизации для узла B (т.е. величина в поле "Synchro Accuracy" пакета данных, принятого от узла B)" +1=2».
Когда узел С передает пакет данных узлу B, этот узел C вписывает «2» в поле "Synchro Accuracy" этого пакета, а также вписывает оценочное значение времени по сигналу системы GNSS в поле "Тх Date". Узел B не принимает в расчет эту синхронизационную информацию (поле "Synchro Accuracy" и поле "Тх Date") из этого пакета данных, поскольку его собственная текущая точность синхронизации (=1) выше текущей точности синхронизации узла C (=2).
Когда узел C передает пакет данных узлу D, этот узел C вписывает «2» в поле "Synchro Accuracy" этого пакета, а также вписывает оценочное значение времени по сигналу системы GNSS в поле "Тх Date". Узел D не принимает в расчет эту синхронизационную информацию (поле "Synchro Accuracy" и поле "Тх Date") из этого пакета данных, поскольку его собственная текущая точность синхронизации (=2) равна текущей точности синхронизации узла C (=2).
Резюмируя, как показано на Фиг. 6A, узлы B и C синхронизированы с узлами A и B соответственно. Узлы D и E синхронизированы с узлами E и F соответственно.
Предположим, что во второй момент узел A теряет захват (т.е. более не способен предоставлять время по сигналу системы GNSS) и, с течением времени, его текущая точность синхронизации снижается.
Когда текущая точность синхронизации узла A снижается до «1», тогда параметры текущих точностей синхронизации узлов B и C становятся равными «2» и «3» соответственно. Узлы B и C по-прежнему остаются синхронизированными с узлами A и B соответственно.
Как показано на Фиг. 6B, когда текущая точность синхронизации узла A снижается до «2», тогда параметр точности синхронизации узла B становится равным «3». Узел С тогда изменяет свой источник синхронизации посредством выбора узла D, но параметр текущей точности синхронизации узла C по-прежнему равен «3».
Наконец, как показано на Фиг. 6C, когда текущая точность синхронизации узла A снижается до «5», тогда узел A изменяет свой источник синхронизации, которым становится узел B. Теперь узлы A, B и C синхронизированы с узлами B, C и D соответственно. Параметры текущей точности синхронизации узлов A, B и C становятся равными 5, 4 и 3 соответственно. Узлы D и E по-прежнему синхронизированы с узлами E и F соответственно.
По меньшей мере один из вариантов настоящего изобретения предлагает способ синхронизации в системе сбора данных, позволяющий каждому устройству сбора данных легко выбрать опорный тактовый сигнал (т.е. источник тактового сигнала) даже при наличии нескольких возможных опорных тактовых сигналов (т.е. нескольких источников синхронизации).
По меньшей мере один из вариантов настоящего изобретения предлагает такой способ, работающий более надежно в неблагоприятной среде, чем известные системы на основе только одного источника синхронизации.
По меньшей мере один из вариантов настоящего изобретения предлагает такой способ, который может быть реализован в многопролетной сети связи.
По меньшей мере один из вариантов настоящего изобретения предлагает такой способ, который может быть реализован и создать синхронизационное резервирование в устройстве сбора данных, содержащем приемник или соединенном с приемником (например, приемник GNSS или приемник сигналов синхронизационного маяка), предоставляющим опорный тактовый сигнал.
По меньшей мере один из вариантов настоящего изобретения предлагает такой способ, который. может быть применим в любой беспроводной или проводной сети устройств сбора данных.
Хотя настоящее изобретение было описано на одном или нескольких примерах, специалисты в рассматриваемой области должны понимать, что в форму и в детали этих примеров могут быть внесены изменения без отклонения от объема настоящего изобретения и/или прилагаемой Формулы изобретения.
Реферат
Изобретение относится к области связи. Предложен способ синхронизации в системе сбора данных, содержащей несколько устройств сбора данных. Конкретное устройство сбора данных из указанных нескольких устройств выполняет следующие этапы: прием пакета данных от другого устройства в системе сбора данных; выделение информации о точности синхронизации и информации об опорном тактовом сигнале из принятого пакета данных; получение первого опорного тактового сигнала в функции выделенной информации об опорном тактовом сигнале; если выделенная информация о точности синхронизации указывает более высокую точность синхронизации, чем текущая информация о точности синхронизации, ассоциированная с рассматриваемым конкретным устройством сбора данных: принятие полученного первого опорного тактового сигнала в качестве выбранного опорного тактового сигнала и обновление текущей информации о точности синхронизации с целью индикации более низкой точности синхронизации, чем выделенная информация о точности синхронизации. 3 н. и 10 з.п. ф-лы, 9 ил.
Формула
Документы, цитированные в отчёте о поиске
Реализация сетевой инфраструктуры в сейсмической регистрирующей системе
Комментарии