Трехкомпонентный скважинный сейсмометр - RU195158U1
Код документа: RU195158U1
Чертежи


Описание
Полезная модель относится к измерительной технике, в частности к сейсмометрии, и может быть использована для сейсмического мониторинга.
Известен трехкомпонентный скважинный цифровой сейсмометр [1], содержащий блок сбора данных с основным источником питания, блок электроники, состоящий из аналого-цифрового преобразователя, соединенного с микропроцессором, трехкомпонентный акселерометрический датчик, соединенный с аналого-цифровым преобразователем, наклономер, трехкоординатный магнитометр и установленный в блоке электроники вторичный источник питания, при этом наклономер и трехкоординатный магнитометр соединены с микропроцессором, причем трехкомпонентный акселерометрический датчик, наклономер, трехкоординатный магнитометр и блок электроники соединены с вторичным источником питания и установлены в водонепроницаемом корпусе, выполненном из нержавеющей стали.
Этот сейсмометр не обеспечивает защиты от сейсмических помех и изменения ориентации в скважине.
Наиболее близким техническим решением к предлагаемому является трехкомпонентный скважинный сейсмометр KS-2000BH [2], [3], фирмы Geotech Instruments LLC. Сейсмометр содержит в герметичном корпусе блок арретирования, генератор, первый, второй и третий каналы приема сигналов, причем каждый канал включает маятник, интегратор, усилитель, калибратор, последовательно соединенные емкостный датчик перемещения, усилитель-демодулятор, блок обратной связи и магнитоэлектрический преобразователь, и в каждом канале маятник механически связан с емкостным датчиком перемещения, с магнитоэлектрическим преобразователем и блоком арретирования, калибратор подключен выходом ко входу магнитоэлектрического преобразователя, усилитель и интегратор подключены к выходу усилителя-демодулятора а емкостный датчик перемещения и усилитель-демодулятор подключены к генератору.
Недостатком прототипа является отсутствие возможности изменения азимутальной ориентации диаграмм направленности трехкомпонентного скважинного сейсмометра после установки в скважину.
Техническим результатом, обеспечиваемым заявленной полезной моделью, является возможность изменения азимутальной ориентации диаграмм направленности трехкомпонентного скважинного сейсмометра после установки в скважину.
Технический результат достигается тем, что трехкомпонентный скважинный сейсмометр, содержащий в герметичном корпусе с подпружиненными стабилизаторами блок арретирования, генератор, первый и второй каналы приема горизонтальных составляющих сигналов и третий канал приема вертикальной составляющей сигналов, причем каждый канал включает маятник, первый усилитель, калибратор, последовательно соединенные емкостный датчик перемещения, второй усилитель, первый демодулятор, блок обратной связи и магнитоэлектрический преобразователь, и в каждом канале маятник механически связан с емкостным датчиком перемещения, с магнитоэлектрическим преобразователем и блоком арретирования, калибратор подключен выходом ко входу магнитоэлектрического преобразователя, первый усилитель подключен к выходу первого демодулятора, а емкостный датчик перемещения и первый демодулятор подключены к генератору, дополнительно содержит микропроцессор, первый аналого-цифровой преобразователь (АЦП), второй АЦП, третий АЦП, датчик азимутального перемещения, последовательно соединенные первый ЦАП и первый фильтр, последовательно соединенные второй ЦАП и второй фильтр, первый сумматор, третий цифроаналоговый преобразователь (ЦАП), второй сумматор, модем, первый канал преобразования сигналов, второй канал преобразования сигналов, третий канал преобразования сигналов и четвертый канал преобразования сигналов, причем каждый канал преобразования сигналов включает последовательно соединенные третий усилитель, умножитель и первый фазовращатель, последовательно соединенные функциональный преобразователь, второй фазовращатель и четвертый усилитель, а второй вход умножителя подключен к выходу четвертого усилителя в каждом канале, последовательно соединенные второй демодулятор и четвертый АЦП, последовательно соединенные третий демодулятор и пятый АЦП, причем выходы первого и второго сумматоров подключены, соответственно, ко второму и третьему демодуляторам, вторые входы второго и третьего демодуляторов подключены к генератору, выходы первых фазовращателей первого и второго каналов преобразования сигналов подключены ко входам первого сумматора, выходы первых фазовращателей третьего и четвертого каналов преобразования сигналов подключены ко входам второго сумматора, входы функциональных преобразователей первого и второго каналов преобразования сигналов подключены к выходу первого фильтра, входы функциональных преобразователей третьего и четвертого каналов преобразования сигналов подключены к выходу второго фильтра, входы третьих усилителей первого и третьего каналов преобразования сигналов подключены к выходу второго усилителя первого канала приема сигналов, входы третьих усилителей второго и четвертого каналов преобразования сигналов подключены к выходу второго усилителя второго канала приема сигналов, выходы первых усилителей первого, второго и третьего каналов приема сигналов подключены, соответственно, к первому, второму и третьему АЦП, входы управления первого, третьего и четвертого усилителей и первого и второго фазовращателей подключены к микропроцессору, датчик азимутального перемещения, входы всех ЦАП и выходы всех АЦП подключены к микропроцессору, третий ЦАП выполнен трехканальным и подключен выходами ко входам калибраторов, блок арретирования выполнен трехканальным и подключен к микропроцессору, первый и второй фазовращатели выполнены с управлением по фазе, первый, третий и четвертый усилители выполнены с управлением по полосе пропускания и чувствительности, функциональные преобразователи первого и третьего каналов преобразования сигналов реализуют функцию cos x, а функциональные преобразователи второго и четвертого каналов преобразования сигналов реализуют функцию sin x.
Такое выполнение трехкомпонентного скважинного сейсмометра обеспечивает возможность изменения азимутальной ориентации диаграмм направленности трехкомпонентного скважинного сейсмометра после установки в скважину.
На фиг. 1 представлена структурная схема трехкомпонентного скважинного сейсмометра.
На фиг. 2 представлена схема одного из возможных вариантов установки трехкомпонентного скважинного сейсмометра в скважине.
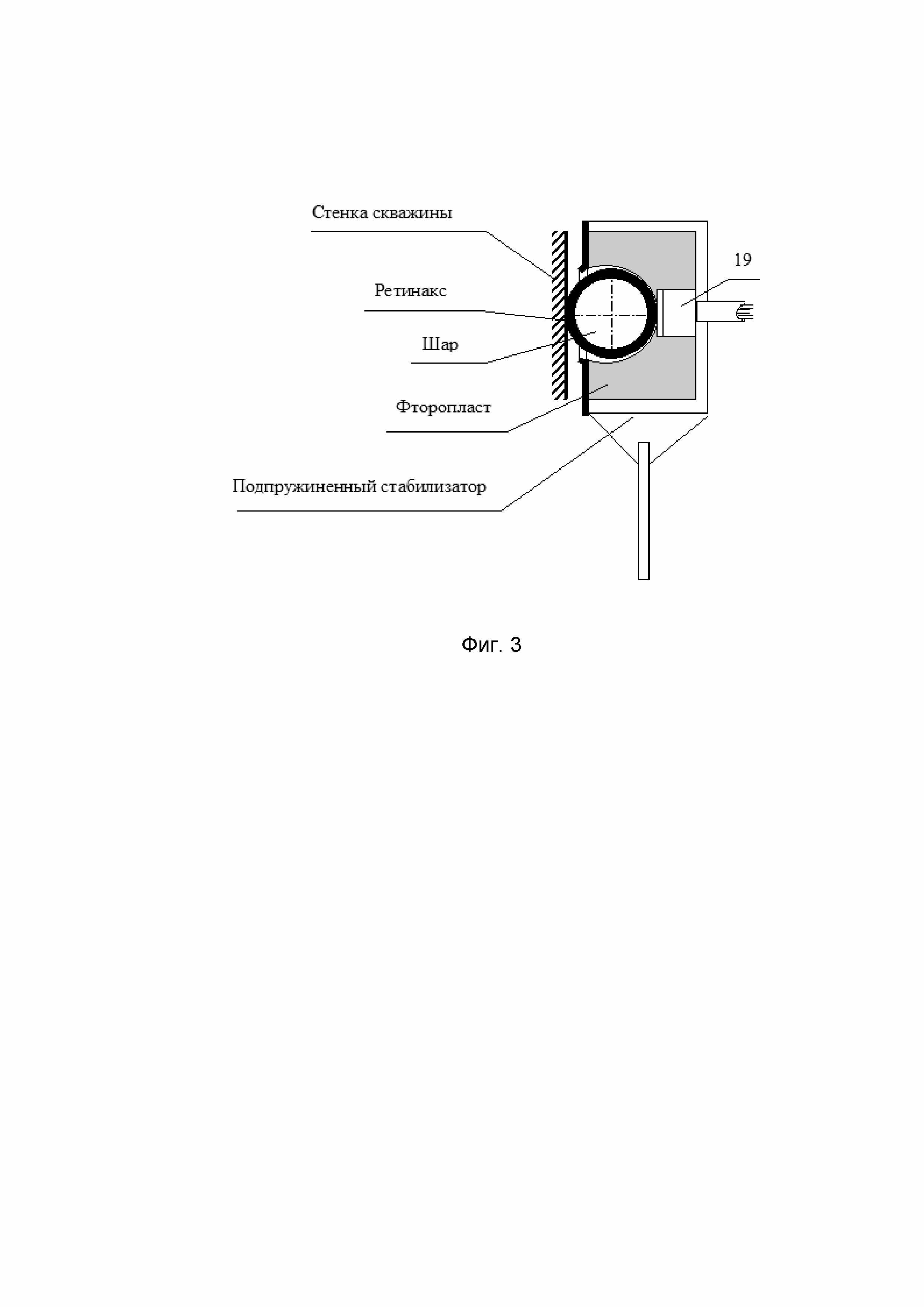
На фиг. 3 представлена схема одного из возможных вариантов установки датчика азимутального перемещения на стандартном подпружиненном стабилизаторе путем замены ролика одного из стабилизаторов на шар.
Принятые обозначения:
1 – герметичный корпус, 2 – блок арретирования, 3 – генератор, 4 – первый канал приема сигналов, 5 – второй канал приема сигналов, 6 – третий канал приема сигналов, 7 – маятник, 8 – первый усилитель, 9 – калибратор, 10 – емкостный датчик перемещения, 11 – второй усилитель, 12 – первый демодулятор, 13 – блок обратной связи, 14 – магнитоэлектрический преобразователь, 15 – микропроцессор, 16 – первый аналого-цифровой преобразователь (АЦП), 17 – второй АЦП, 18 – третий АЦП, 19 – датчик азимутального перемещения, 20 – первый цифроаналоговый преобразователь (ЦАП), 21 – первый фильтр, 22 – второй ЦАП, 23 – второй фильтр, 24 – первый сумматор, 25 – третий ЦАП, 26 – второй сумматор, 27 – модем, 28 – первый канал преобразования сигналов, 29 – второй канал преобразования сигналов, 30 – третий канал преобразования сигналов, 31 – четвертый канал преобразования сигналов, 32 – третий усилитель, 33 – умножитель, 34 – первый фазовращатель, 35 – функциональный преобразователь, 36 – второй фазовращатель, 37 – четвертый усилитель, 38 – второй демодулятор, 39 – четвертый АЦП, 40 – третий демодулятор, 41 – пятый АЦП.
Трехкомпонентный скважинный сейсмометр содержит в герметичном корпусе 1 с подпружиненными стабилизаторами блок 2 арретирования, генератор 3, первый и второй каналы 4, 5 приема горизонтальных составляющих сигналов и третий канал 6 приема вертикальной составляющей сигналов, причем каждый канал включает маятник 7, первый усилитель 8, калибратор 9, последовательно соединенные емкостный датчик 10 перемещения, второй усилитель 11, первый демодулятор 12, блок 13 обратной связи и магнитоэлектрический преобразователь 14, и в каждом канале маятник 7 механически связан с емкостным датчиком 10 перемещения, с магнитоэлектрическим преобразователем 14 и блоком 2 арретирования, калибратор 9 подключен выходом ко входу магнитоэлектрического преобразователя 14, первый усилитель 8 подключен к выходу первого демодулятора 12, а емкостный датчик 10 перемещения и первый демодулятор 12 подключены к генератору 3, дополнительно содержит микропроцессор 15, первый аналого-цифровой преобразователь (АЦП) 16, второй АЦП 17, третий АЦП 18, датчик 19 азимутального перемещения, последовательно соединенные первый ЦАП 20 и первый фильтр 21, последовательно соединенные второй ЦАП 22 и второй фильтр 23, первый сумматор 24, третий цифроаналоговый преобразователь (ЦАП) 25, второй сумматор 26, модем 27, первый канал 28 преобразования сигналов, второй канал 29 преобразования сигналов, третий канал 30 преобразования сигналов и четвертый канал 31 преобразования сигналов, причем каждый канал преобразования сигналов включает последовательно соединенные третий усилитель 32, умножитель 33 и первый фазовращатель 34, последовательно соединенные функциональный преобразователь 35, второй фазовращатель 36 и четвертый усилитель 37, а второй вход умножителя 33 подключен к выходу четвертого усилителя 37 в каждом канале, последовательно соединенные второй демодулятор 38 и четвертый АЦП 39, последовательно соединенные третий демодулятор 40 и пятый АЦП 41, причем выходы первого и второго сумматоров 24, 26 подключены, соответственно, ко второму и третьему демодуляторам 38, 40 , вторые входы второго и третьего демодуляторов 38, 40 подключены к генератору 3, выходы первых фазовращателей 34 первого и второго каналов 28, 29 преобразования сигналов подключены ко входам первого сумматора 24, выходы первых фазовращателей 34 третьего и четвертого каналов 30, 31 преобразования сигналов подключены ко входам второго сумматора 26, входы функциональных преобразователей 35 первого и второго каналов 28, 29 преобразования сигналов подключены к выходу первого фильтра 21, входы функциональных преобразователей 35 третьего и четвертого каналов 30, 31 преобразования сигналов подключены к выходу второго фильтра 23, входы третьих усилителей 32 первого и третьего каналов 28, 30 преобразования сигналов подключены к выходу второго усилителя 11 первого канала 4 приема сигналов, входы третьих усилителей 32 второго и четвертого каналов 29, 31 преобразования сигналов подключены к выходу второго усилителя 11 второго канала 5 приема сигналов, выходы первых усилителей 8 первого, второго и третьего каналов 4, 5, 6 приема сигналов подключены, соответственно, к первому, второму и третьему АЦП 16, 17, 18, входы управления первого, третьего и четвертого усилителей 8, 32, 37 и первого и второго фазовращателей 34, 36 подключены к микропроцессору 15, датчик 19 азимутального перемещения, входы всех ЦАП и выходы всех АЦП подключены к микропроцессору 15, третий ЦАП 25 выполнен трехканальным и подключен выходами ко входам калибраторов 9, блок 2 арретирования выполнен трехканальным и подключен к микропроцессору 15, первый и второй фазовращатели 34, 36 выполнены с управлением по фазе, первый, третий и четвертый усилители 8, 32, 37 выполнены с управлением по полосе пропускания и чувствительности, функциональные преобразователи 35 первого и третьего каналов 28, 30 преобразования сигналов реализуют функцию cosx, а функциональные преобразователи 35 второго и четвертого каналов 29, 31 преобразования сигналов реализуют функцию sinx.
Трехкомпонентный скважинный сейсмометр работает следующим образом.
При появлении сейсмических воздействий происходит перемещение относительно герметичного корпуса 1 маятника 7 в первом канале 4 приема сигналов, что вызывает на выходе емкостного датчика 10 перемещения появление сигнала, который поступает на вход второго усилителя 11, усиливается и выпрямляется в демодуляторе 12 с помощью опорных сигналов генератора 3, поступающих на емкостный датчик 10 перемещения и дополнительный вход демодулятора 12. Выходной сигнал демодулятора 12 усиливается первым усилителем 8 и поступает через первый АЦП 16 в микропроцессор 15 для передачи с помощью модема 27 через линию связи и дальнейшей обработки в ПЭВМ. Кроме того, выходной сигнал демодулятора 12 поступает через блок 13 обратной связи на магнитоэлектрический преобразователь 14, механически связанный с маятником 7 и реализующий отрицательную обратную связь в трехкомпонентном скважинном сейсмометре.
Аналогично при появлении сейсмических воздействий второй и третий каналы 5, 6 приема сигналов преобразуют и посылают сейсмические сигналы через второй и третий АЦП 17, 18 в микропроцессор 15 для передачи с помощью модема 27 через линию связи и дальнейшей обработки в ПЭВМ. Контроль работоспособности трехкомпонентного скважинного сейсмометра осуществляется подачей из микропроцессора 15 калибровочных сигналов через третий ЦАП 25 и калибраторы 9 на входы магнитоэлектрических преобразователей 14. Для предотвращения механических повреждений опор маятников 7 при транспортировке и установке трехкомпонентного скважинного сейсмометра в скважину маятники 7 фиксируются подачей соответствующих сигналов из микропроцессора 15 на блок 2 арретирования (включающий, например, для каждого канала механизм арретирования, общие электродвигатель и ключ, связанный с микропроцессором). Перед установкой сейсмометр опускают в скважину в районе оголовка и поворачивают на заданный угол, считывая начальное и конечное показания датчика 19 азимутального перемещения для масштабирования смещений, выдаваемых датчиком на конкретной скважине. При установке в скважину трехкомпонентный скважинный сейсмометр ориентируют по азимуту на оголовке скважины, опускают на заданную глубину и фиксируют. При этом датчик 19 азимутального перемещения (например, аналог лазерной компьютерной мыши [4]), установленный на подпружиненном стабилизаторе, формирует и передает в ПЭВМ информацию о величине и направлении смещения трехкомпонентного скважинного сейсмометра относительно первоначальной азимутальной ориентации. По полученным сигналам в ПЭВМ вычисляется угол, на который необходимо повернуть трехкомпонентный скважинный сейсмометр, чтобы восстановить ориентацию. В предложенном техническом решении трехкомпонентный скважинный сейсмометр остается неподвижным, реализуется поворот диаграмм направленности трехкомпонентного скважинного сейсмометра на любой заданный угол, что дает возможность получения требуемой ориентации или поиска положения с минимумом помех. Для этого сигналы с выходов вторых усилителей 11 первого канала 4 приема сигналов поступают на входы третьих усилителей 32 первого и третьего каналов 28, 30 преобразования сигналов, а сигналы с выходов вторых усилителей 11 второго канала 5 приема сигналов поступают на входы третьих усилителей 32 второго и четвертого каналов 29, 31 преобразования сигналов.
С выходов третьих усилителей 32 сигналы, пропорциональные синусу и косинусу первого угла между направлением на источник сигнала и продольной осью диаграммы направленности в горизонтальной плоскости трехкомпонентного скважинного сейсмометра, ориентированной на оголовке скважины, например, на Север, поступают на первые входы умножителей 33, соответственно, первого и второго каналов 28, 29 преобразования сигналов, а также на первые входы умножителей 33, соответственно, третьего и четвертого каналов 30, 31 преобразования сигналов. На вторые входы умножителей 33 первого и второго каналов 28, 29 преобразования сигналов через второй фазовращатель 36 и четвертый усилитель 37 поступают сигналы из функциональных преобразователей 35 первого и второго каналов 28, 29 преобразования сигналов, пропорциональные, соответственно, косинусу и синусу второго угла поворота диаграммы направленности, величина и знак которого задается сигналом из ПЭВМ, поступающим через микропроцессор 15, первый ЦАП 20 и первый фильтр 21 на функциональные преобразователи 35 первого и второго каналов приема сигналов. Выходные сигналы умножителей 33 первого и второго каналов 28, 29 преобразования сигналов через первый фазовращатель 34 поступают на входы первого сумматора 24. Выходной сигнал первого сумматора 24 пропорционален сумме произведений синуса первого угла на косинус второго угла и косинуса первого угла на синус второго угла, пропорционален синусу суммы первого и второго углов, что соответствует повороту диаграммы направленности на второй угол. На вторые входы умножителей 33 третьего и четвертого каналов 30, 31 преобразования сигналов через второй фазовращатель 36 и четвертый усилитель 37 поступают сигналы из функциональных преобразователей 35 третьего и четвертого каналов 30, 31 преобразования сигналов, пропорциональные, соответственно, косинусу и синусу третьего угла поворота диаграммы направленности равного второму углу, сдвинутому, например, на 90º, величина и знак которого задается сигналом из ПЭВМ, поступающим через микропроцессор 15, второй ЦАП 22 и второй фильтр 23 на функциональные преобразователи 35 третьего и четвертого каналов 30, 31 преобразования сигналов. Выходные сигналы умножителей 33 третьего и четвертого каналов 30, 31 преобразования сигналов через первый фазовращатель 34 поступают на входы второго сумматора 26. Выходной сигнал второго сумматора 26 пропорционален сумме произведений синуса первого угла на косинус третьего угла и косинуса первого угла на синус третьего угла, пропорционален синусу суммы первого и третьего углов, что соответствует повороту диаграммы направленности на третий угол или на второй угол и 90.º Таким образом, на выходах первого и второго сумматоров формируются сигналы, соответствующие двум взаимно перпендикулярным дипольным диаграммам направленности, которые могут одновременно поворачиваться на требуемый угол. Полученные сигналы поступают в микропроцессор 15 через второй и третий демодуляторы 38, 40 и четвертый и пятый АЦП 39, 41 и передаются далее с помощью модема 27 в ПЭВМ для дальнейшей обработки.
При необходимости динамический диапазон сейсмометра может быть увеличен заменой блоков умножения управляемыми аналоговыми или цифровыми аттенюаторами [5] или установкой гониометра [6].
Таким образом, достигается заявленный результат и предлагаемый трехкомпонентный скважинный сейсмометр обеспечивает возможность изменения азимутальной ориентации диаграмм направленности трехкомпонентного скважинного сейсмометра после установки в скважину.
Источники информации.
1. Скважинный трехкомпонентный цифровой акселерометр (патент РФ № 2488849 С1, МПК G01V 1/16, 27.07.2013).
2. Broadband Seismometer – Models KS-2000 and KS-2000M, Operation Manual, руководство по эксплуатации, GEOTECH INSTRUMENTS, LLC, Copyright © 2000-2002, http://www.geoinstr.com/pub/manuals/ks-2000m.pdf.
3. Broadband Seismometer, Model KS-2000M, Rev. 2, Model KS-2000BH, Datasheets, Справочные данные, GEOTECH INSTRUMENTS, LLC, OCTOBER 2012, http://www.geoinstr.com/ds-ks2000m.pdf.
4. Anatoly Besplemennov, Измерение угловых или линейных перемещений с помощью оптического датчика мыши, журнал РАДИОЛОЦМАН, май 2015, https://www.rlocman.ru/book/book.html?di=160368.
5. Электронный гониометр с высоким динамическим диапазоном (патент РФ № 117017 U1, МПК G01S 3/30, 10.06.2012).
6. Устройство для определения направления на источник сигнала (патент РФ № 2544879 C1, МПК G01V 1/16, 20.03.2015).
Реферат
Полезная модель относится к измерительной технике, в частности к сейсмометрии, и может быть использована для сейсмического мониторинга. Заявлен трехкомпонентный скважинный сейсмометр, содержащий в герметичном корпусе с подпружиненными стабилизаторами блок арретирования, генератор, первый и второй каналы приема горизонтальных составляющих сигналов и третий канал приема вертикальной составляющей сигналов. Причем каждый канал включает маятник, первый усилитель, калибратор, последовательно соединенные емкостный датчик перемещения, второй усилитель, первый демодулятор, блок обратной связи и магнитоэлектрический преобразователь. В каждом канале маятник механически связан с емкостным датчиком перемещения, с магнитоэлектрическим преобразователем и блоком арретирования, калибратор подключен выходом ко входу магнитоэлектрического преобразователя, первый усилитель подключен к выходу первого демодулятора, а емкостный датчик перемещения и первый демодулятор подключены к генератору. Сейсмометр дополнительно содержит микропроцессор, первый аналого-цифровой преобразователь (АЦП), второй АЦП, третий АЦП, датчик азимутального перемещения, последовательно соединенные первый ЦАП и первый фильтр, последовательно соединенные второй ЦАП и второй фильтр, первый сумматор, третий цифроаналоговый преобразователь (ЦАП), второй сумматор, модем, первый, второй, третий и четвертый каналы преобразования сигналов. Причем каждый канал преобразования сигналов включает последовательно соединенные третий усилитель, умножитель и первый фазовращатель, последовательно соединенные функциональный преобразователь, второй фазовращатель и четвертый усилитель, определенным образом соединенные и подключенные к сумматорам, АЦП и ЦАП. Причем функциональные преобразователи первого и третьего каналов преобразования сигналов реализуют функцию cosx, а функциональные преобразователи второго и четвертого каналов преобразования сигналов реализуют функцию sinx. Технический результат - возможность изменения азимутальной ориентации диаграмм направленности трехкомпонентного скважинного сейсмометра после установки в скважину. 3 ил.
Комментарии