Когерентный источник звука для морской сейсморазведки - RU2702421C2
Код документа: RU2702421C2
Чертежи







Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка является частичным продолжением патентной заявки США № 14/421,006, поданной 11 февраля 2015 г. под названием ʺCoherent Sound Source for Marine Seismic Surveysʺ, по которой испрашивается приоритет заявки по Договору о патентном сотрудничестве (PCT) за № PCT/US13/54082, поданной 8 августа 2013 г. и предварительной патентной заявки США за № 61/682,461, поданной 13 августа 2012 г., каждая из которых включена сюда посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится, в целом, к поршневым подводным звукоизлучателям, которые используют электромагнитный возбудитель и применяются к морской сейсморазведке.
УРОВЕНЬ ТЕХНИКИ
Звуковые волны являются основным инструментом, используемым для поиска залежей нефти и газа под геологическими пластами. Звуковые волны удобны тем, что они могут распространяться на большие расстояния и проникать в сложные слоистые среды для получения важной информации, касающейся наличия, состава и физической протяженности залежей. Это применимо к разведочным работам, проводимым на суше и в воде. Хотя для генерации звуковых волн в воде использовались различные способы, основной метод в течение последних трех десятилетий предусматривает использование пневмопушек, которые отводят короткие импульсы воздуха высокого давления. Образование и схлопывание пузырьков воздуха в этом процессе приводит к тому, что звуковые волны высокой энергии распространяются к морскому дну, перенося приблизительно 98% энергии, генерируемой в частотном диапазоне от 5 до 200 Гц. Волны проникают в пласты и по-разному отражаются к поверхности, где они регистрируются массивом приемников (т.е. гидрофонов).
Вообще говоря, морская сейсморазведка осуществляется буксировкой от 12 до 48 пневмопушек от 300 до 500 м позади исследовательского судна на глубинах порядка от 1 до 10 м. Пневмопушки обычно конфигурируются в виде плоского массива и создают уровни источника до 240 дБ относительно 1 мкПа-м. Это импульсные звуки, обусловленные внезапным разрядом воздуха высокого давления, которые повторяется с регулярными интервалами в пределах от 5 до 20 секунд. Приемный массив, который регистрирует прямую и отраженную звуковые волны, обычно состоящий из максимум 16 сейсмоприемных кос, каждая из которых содержит сотни гидрофонов. Сейсмоприемные косы обычно имеют длину от 3 до 12 км и имеют поперечное разнесение где-то от 50 до 100 м. Конфигурация источник-приемник при скоростях буксирования в пределах от 1,5 до 2,5 м/с позволяет осуществлять разведку со скоростью порядка 10 км2/день.
За дополнительной информацией по морской сейсморазведке можно обратиться к ʺMarine Geophysical Operations: An Overview,ʺ International Association of Geophysical Contractors (июнь 2009 г.) или ʺAn Overview of Marine Seismic Operations,ʺ International Association of Oil and Gas Producers, Report No. 448 (апрель 2011 г.), каждая из которых включена сюда посредством ссылки. За дополнительной информацией по пневмопушкам, используемым в морской сейсморазведке, см., например, W. Dragoset, ʺAn Introduction to Air Guns and Air-Gun Arrays,ʺ The Leading Edge, 19 (8), 892-897 (2000) или J. Caldwell and W. Dragoset, ʺA Brief Overview of Seismic Air-gun Arrays,ʺ The Leading Edge, 19 (8), 898-902 (2000), каждая из которых включена сюда посредством ссылки.
В течение многих лет специалисты по проблемам окружающей среды, ученые и правительственные организации озабочены тем, что увеличение уровней звука в морской среде может отрицательно сказываться на морской фауне. Морские млекопитающие являются предметом основной заботы, тогда как рыба и беспозвоночные вызывают меньший интерес. Обзор этих проблем применительно к морским млекопитающим можно найти в ʺAirgun Arrays and Marine Mammals,ʺ International Association of Geophysical Contractors (август 2002 г.), включенной сюда посредством ссылки. Ввиду растущей озабоченности возможным негативным влиянием звука на морскую биоту, возникает опасение, что в будущем морская сейсморазведка может быть значительно ограничена законодательством. Исходя из этих соображений, в нефтяной и газовой промышленности рассматриваются альтернативы пневмопушкам и, в частности, использование морских вибраторов, которые могут обеспечивать когерентный (т.е. не импульсный) источник акустической энергии для повышения эффективности системы. Многие особенности морских систем вибрационной сейсморазведки подчеркивают их важность в деле защиты окружающей среды. Например:
(1) использование когерентного источника может обеспечивать возбуждение в течение гораздо более длительного интервала времени, чем в случае некогерентного (т.е. импульсного) источника, например пневмопушки, что, предположительно, представляет меньшую опасность для морской фауны, поскольку одна и та же номинальная энергия, в конкретном диапазоне, представляющем интерес, может распределяться по времени, а не концентрироваться в моменте времени;
(2) использование когерентного источника в большей степени позволяет уменьшать или устранять высокочастотные компоненты (например, звуки частотой более 100 Гц) по сравнению с некогерентным источником, поскольку частотное представление сигналов, связанных с когерентным источником, обычно концентрируются на детерминированных и управляемых частотах, тем самым, ограничивая звуковую энергию конкретным диапазоном, который можно адаптировать так, чтобы создавать минимальную опасность для определенных видов морской фауны.
Полный обзор воздействия морской сейсморазведки, осуществляемой с использованием морских вибраторов, в отличие от пневмопушек, на окружающую среду можно найти в ʺEnvironmental Assessment of Marine Vibroseis,ʺ подготовленном LGL, Ltd and Marine Acoustics, Inc., LGL Report TA4604-1, JIP Contract 22 07-12 (апрель 2011 г.), включенном сюда посредством ссылки.
Помимо некоторых преимуществ в охране окружающей среды, связанных с использованием когерентных источников звука для морской сейсморазведки, существуют также преимущества их использования для повышения эксплуатационных показателей системы разведки в целом. Например, использование когерентных источников звука для морской сейсморазведки позволяет адаптировать сигнал возбуждения, связанный с массивом излучателей, и алгоритмы обработки сигнала, связанные с приемным массивом, таким образом, чтобы создавать наиболее точное изображение оцениваемых слоистых сред. Некоторые примеры сигналов возбуждения включают в себя, но без ограничения частотно-модулированные (FM) свипы и псевдослучайный шум (PRN).
Особенность этих сигналов состоит в возможности точного управления излучателем (или несколькими излучателями, используемыми в массиве), что непросто осуществлять с использованием некогерентных источников наподобие пневмопушек. Системы сбора данных на основе FM и PRN сигналов могут применять такие методы обработки сигнала, как согласованные фильтры для повышения отношения сигнал/шум без необходимости в увеличении уровня источника. Выигрыш от обработки сигналов также может достигаться за счет увеличения времени интегрирования, связанного с когерентными сигналами, которые генерируются в течение протяженных периодов времени. Учебники, где подробно описаны эти и другие методы обработки, включают в себя W. S. Burdic, Underwater Acoustic System Analysis, Prentice Hall, Inc. (1984); и A. D. Whalen Detection of Signals in Noise, Academic Press (1971), каждый из которых включен сюда посредством ссылки.
Ретроспективно, использование когерентных источников звука в связи с морской сейсморазведкой не имело широкого распространения, но некоторые устройства получили практическое применение и раскрыты в открытых источниках. Некоторое время назад были разработаны морские вибраторы, состоящие из поршня с гидроприводом и продольно-изгибного преобразователя, описанные в W. D. Weber and G. R. Johnson, ʺAn Environmentally Sound Geophysical Source - The Transition Zone Marine Vibrator,ʺ Conference Proceedings, Society of Petroleum Engineers, Paper SPE 46805 (1988) и ʺPGS Electrical Marine Vibrator,ʺ TechLink - A Publication of PGS Geophysical, 11 (5) (ноябрь 2005 г.), каждая из которых включена сюда посредством ссылки. Идея использовать поршень с гидроприводом в воде является адаптацией основного механизма преобразования, применяемого в наземных вибраторах, например, разработанных в Industrial Vehicles International (Талса, Оклахома). Продольно-изгибный преобразователь, разработанный в PGS (Осло, Норвегия), в целом, соответствует конструкции класса IV и положен в основу некоторых вариантов осуществления на протяжении 20-летнего периода, что отражено в патентах США №№ 5,329,499, 5,757,726, 6,085,862, 7,551,518, 7,881,158 и 8,446,798, каждый из которых включен сюда посредством ссылки. Из этих патентов следует, что авторы изобретения рассматривали конструкции преобразователя, в которых применяются возбуждающие элементы, расположенные на большой или малой оси продольно-изгибной оболочки. Кроме того, они рассматривали использование возбуждающих элементов, действие которых основано на магнитострикционном, пьезоэлектрическом электродинамическом или других принципах для преобразования электрическая энергия в механическое движение продольно-изгибной оболочки. В конструкцию излучателя можно вносить различные изменения, чтобы устройство отвечало эксплуатационным требованиям в рабочем диапазоне, представляющем интерес (т.е. номинально от 5 до 100 Гц). Примечательно, что в вышеуказанной публикации PGS, для охвата всего диапазона, представляющего интерес, необходимы два отдельных продольно-изгибных преобразователя. Также, в этом конкретном устройстве применяется магнитострикционный возбудитель, расположенный вдоль большой оси продольно-изгибной оболочки.
Несколько лет назад исследователи Teledyne-Webb Research (Северный Фалмут, Массачусетс) и CGG Veritas (Париж, Франция) запатентовали устройства, предназначенные для использования в морской сейсморазведке. Teledyne-Webb Research первым предложило использовать принцип пузырьковый преобразователь в 1960 г. и затем запатентовало его в 1965 г. что отражено в C. C. Sims, ʺBubble Transducer for Radiating High-Power, Low-Frequency Sound in Water,ʺ J. Acoust. Soc. Am., 32, 1305-1308 (1960) и патенте США № 3,219,970, соответственно, которые оба включены сюда посредством ссылки. Преобразователи, разработанные в Teledyne-Webb Research, описаны в патентах США №№ 8,331,198, 8,441,892 и 8,634,276, каждый из которых включен сюда посредством ссылки, где заявлено расширение и усовершенствование первоначального принципа, предложенного Симсом. В отличие от пузырькового преобразователя, CGG Veritas разработало поршневой звукоизлучатель, что отражено в патентах США №№ 8,830,794 и 8,837,259, которые оба включены сюда посредством ссылки. Эти патенты описывают излучатели, которые используют два отдельных привода для генерации звука в нужном диапазоне, представляющем интерес. Один из приводов работает по принципу динамической регулировки компенсации давления газа, содержащегося в кожухе, где находится поршень. Работа другого привода основана на использовании преобразователя с подвижной катушкой или подвижным магнитом для приведения в движение поршня, то есть имеет электродинамическую природу, поскольку движущая сила, как описано Лоренцем, пропорциональна векторному произведению магнитного поля B и тока I в катушке. Привод с регулировкой давления обычно используется для звуковых волн на частотах ниже 4 Гц, тогда как электродинамический привод обычно используется для звуковых волн на частотах, больших или равных 4 Гц. Отметим, что многочисленные аспекты электродинамического привода, системы компенсации давления, геометрии и размещения поршня и т.д., связанные с устройствами, раскрытыми в патентах США №№ 8,830,794 и 8,837,259, аналогичны описанным в B. S. Willard, ʺA Towable, Moving-Coil Acoustic Target for Low Frequency Array Calibration,ʺ NUSC Technical Report 6369, датированной 29 апреля 1981 г. (DTIC Report No. ADA099872), включенной сюда посредством ссылки.
Как дополнительно рассмотрено ниже, аспекты настоящего изобретения опираются на поршневой звукоизлучатель, который использует электромагнитный возбудитель, соответствующий генератору силы с подвижным якорем, содержащему катушку (т.е. обмотку) и постоянный магнит, занимающие определенное положение в пространстве. В этом состоит принципиальное отличите от электродинамических возбудителей, которые обычно генерируют силу за счет относительного движения катушки и постоянного магнита. За дополнительной информацией по электромагнитным и электродинамическим генераторам силы, следует обратиться к F. V. Hunt, Electroacoustics - The Analysis of Transduction and Its Historical Background (Acoustical Society of America, Woodbury, NY 1982), главы 5 и 7, включенному сюда посредством ссылки. В отношении генераторов силы с подвижным якорем, см., например, патенты США №№ 5,206,839, 5,266,854 и 5,587,615, каждый из которых включен сюда посредством ссылки. В патенте США № 5,206,839 описано устройство, сконфигурированное как подводный звукоизлучатель. В патентах США №№ 5,266,854 и 5,587,615 описаны устройства, сконфигурированные как вибраторы. Устройства, описанные в патентах США №№ 5,206,839 и 5,266,854 используют магнитную цепь, состоящую из E-образных и I-образных многослойных структур (т.е. статор и якорь, соответственно), где E-образная структура снабжена отдельными обмотками для переменного и постоянного токов (AC и DC). Сигнал DC обеспечивает подмагничивание, которое используется в согласовании с надлежащим образом фазированным сигналом AC для приведения в движение I-образной структуры, которая образует агрегат подвижного якоря. Это размещение обеспечивает действующую силу, которая линейно зависит от подаваемого тока. Заметим, что в отсутствие подмагничивания DC, преобразователи с подвижным якорем по своей природе нелинейны и не подлежат использованию во многих вариантах применения.
Устройство, описанное в патенте США № 5,587,615, предусматривает использование обмотки DC вместо постоянного магнита, приводя к конструкции магнитной цепи, где используется несколько удлиненных многослойных структур (т.е. магнитных сердечников), которые содержат обмотки AC и единственный постоянный магнит, расположенный между сердечниками для обеспечения подмагничивания. Эта компоновка существенно отличается от описанной в патентах США №№ 5,206,839 и 5,266,854, но обеспечивает действующая сила в агрегате подвижного якоря, которая линейно зависит от подаваемого тока.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
в целом, предусмотрен когерентный источник звука для морской сейсморазведки. Согласно одному аспекту изобретения, предусмотрен подводный звукоизлучатель для формирования изменяющихся со временем по гармоническому закону форм волны. Иллюстративный подводный звукоизлучатель содержит множество поршней, приводимых в действие генератором электромагнитной силы, имеющим компоненты, содержащие статор, якоря, электрические катушки и постоянные магниты. Поршни и компоненты генератора электромагнитной силы предназначены для создания механической и магнитной симметрии относительно геометрического центра подводного звукоизлучателя, чтобы, по существу, подавлять реактивные нагрузки, возникающие, когда поршни приводятся в действие. Кроме того, в иллюстративном варианте осуществления, статор и якоря имеют магнитные полюсы, которые используют конусообразную геометрию.
Согласно другому аспекту изобретения, подводный звукоизлучатель, в необязательном порядке, также включает в себя контроллер с обратной связью и встроенный фильтр адаптивной компенсации для (i) уменьшения механической добротности основного резонанса, связанного с агрегатами, содержащими один из поршней и один из якорей, (ii) согласования отклика множества агрегатов, и (iii) гарантировать, что излучаемый сигнал дальнего поля из массива подводных звукоизлучателей, по существу, эквивалентен суперпозиции всех элементов массива, действующих синфазно с идентичной интенсивностью источника.
В другом иллюстративном варианте осуществления, подводный звукоизлучатель, в необязательном порядке, дополнительно содержит систему компенсации давления, использующую газ высокого давления, регулируемого системой управления с обратной связью для выравнивания статической нагрузки на поршни, обусловленной погружением в воду, причем газ высокого давления поступает из множества накопительных резервуаров, расположенных в непосредственной близости к подводному звукоизлучателю, причем накопительные резервуары содержат средство для добавления газа высокого давления из внешне расположенного источника после опустошения накопительных резервуаров.
В одном или более вариантах осуществления, подводный звукоизлучатель содержится в цилиндрическом корпусе, находящемся в, по существу, нейтрально плавучем гидродинамическом буксируемом теле, содержащем управляющие поверхности, используемые системой управления с обратной связью для регулировки глубины погружения и угла крена.
Согласно еще одному аспекту изобретения, предусмотрен массив подводных звукоизлучателей для формирования изменяющихся со временем по гармоническому закону форм волны. Массив содержит множество подводных звукоизлучателей. Несущий кабель-трос, в необязательном порядке, (i) соединяет каждый подводный звукоизлучатель с судном, (ii) передает электрическую мощность и газ под давлением на подводный звукоизлучатель и (iii) обеспечивает среду дуплексной передачи данных для маршрутизации команд с судна на подводный звукоизлучатель и сообщения состояния оборудования на судно.
Чтобы лучше понять настоящее изобретение, а также дополнительные признаки и преимущества настоящего изобретения, следует обратиться к нижеследующему подробному описанию и чертежам.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
фиг. 1 представляет вид спереди, который отражает общий принцип иллюстративного варианта осуществления настоящего изобретения;
фиг. 2 представляет системную схему, демонстрирующую общие функциональные возможности иллюстративного варианта осуществления настоящего изобретения;
фиг. 3 представляет системную схему, демонстрирующую общие функциональные возможности единичного излучателя, согласно иллюстративному варианту осуществления настоящего изобретения;
фиг. 4 представляет полностью собранные и разобранные виды в изометрической проекции, демонстрирующие полностью интегрированный излучатель, согласно иллюстративному варианту осуществления настоящего изобретения;
фиг. 5 представляет функциональный вид в разрезе основного средства преобразования, связанного с полностью интегрированным излучателем, согласно иллюстративному варианту осуществления настоящего изобретения;
фиг. 6 представляет схему, демонстрирующую, как основное средство преобразования преобразует магнитный поток в механическую силу и скорость для иллюстративного варианта осуществления настоящего изобретения;
фиг. 7 представляет схемы, где сравниваются и противопоставляются три различных варианта осуществления основного средства преобразования в соответствии с количеством электрических катушек, применяемых для каждого якоря, и геометрией полюсов, связанных с магнитной цепью;
фиг. 8 представляет схемы цепи с сосредоточенными параметрами, которые представляют иллюстративный вариант осуществления настоящего изобретения;
фиг. 9 представляет схемы, где показан излучатель, сконфигурированный с плоскими, коническими и выпуклыми поршнями;
фиг. 10 представляет схему, где показано, как система компенсации давления интегрирована в излучатель, и подробно представляет различные технические датчики, которые используются системой управления, причем упомянутый признаки представляют иллюстративный вариант осуществления настоящего изобретения; и
фиг. 11 представляет схемы, демонстрирующие архитектуру системы управления для полностью интегрированного излучателя, согласно иллюстративному варианту осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
Аспекты настоящего изобретения предусматривают новый когерентный источник звука, который можно использовать в пространственно распределенном массиве для поддержки морской сейсморазведки. Настоящее изобретение сделано, отчасти, исходя из вопросов защиты окружающей среды, касающихся использования импульсных (т.е. некогерентных) источников звука (т.е. пневмопушек) в качестве основного инструмента формирования изображения для морской сейсморазведки.
Аспекты настоящего изобретения опираются на пространственно распределенный массив полностью интегрированных звукоизлучателей для достижения требуемого уровня источника, необходимого для создания точного сейсмического изображения сложных сред, образующих морское дно, еще не кавитирует на относительно небольших рабочих глубинах (т.е. глубинах порядка от 1 до 10 м), подлежащих разведке. Возможны линейные, плоские и объемные массивы, конкретная геометрия которых зависит от параметров сейсморазведки, а также рабочих эксплуатационных параметров компонентов массива и исследовательского судна, которое буксирует массив.
В ходе типичной сейсморазведки, исследовательское судно буксирует отдельные массивы для передачи и приема звука. Настоящее изобретение относится к передающему массиву и излучателю, используемому передающим массивом. Для этого несущий кабель-трос выступает в роли физического и электрического соединения между исследовательским судном и излучателями, применяемыми массивом. Кабель-трос передает электрическую мощность на каждый элемент массива и выступает в роли среды дуплексной передачи данных для маршрутизации команд от исследовательского судна к излучателям и сообщать состояние оборудования на исследовательское судно от различных компонентов и подсистем, применяемых излучателями. Электрическая мощность, используемая всеми компонентами и подсистемами в каждом излучателе, поступает от специализированного источника питания DC, расположенного на борту исследовательского судна. Соответственно, каждый излучатель снабжен цепью регулировки и распределения мощности. Кабель-трос, в необязательном порядке, передает газ высокого давления (т.е. воздух, азот и т.д.) в накопительные резервуары, расположенные в буксируемом теле для использования в связи с системой компенсации давления.
В одном варианте осуществления, компьютер, расположенный на исследовательском судне, служит для централизованного управления, контроля и координацию всех функций массива. Такие критические параметры, как запуск/синхронизация элементов массива и выбор формы волны полностью передаются на каждый излучатель. После активации излучатель передает форму волны в акустическую среду, осуществляет операции самоконтроля и управления, чтобы гарантировать соответствие требуемому уровню источника, и сообщает состояние, т.е. параметры управления качеством, обратно на центральный компьютер для дополнительного размещение. Этот процесс повторяется, пока не будут выполнены задачи разведки. Компьютер, расположенный в каждом узле массива (т.е. расположенный в каждом излучателе), в необязательном порядке, управляет всеми аспектами излучателя и содержит локальный орган управления и реализацию основного средства преобразования и соответствующие компоненты и подсистемы. Ниже рассмотрены детали, касающиеся функциональных возможностей этого компьютера и связанных с ним систем управления.
В основе аспектов настоящего изобретения лежит звукоизлучатель, сконфигурированный как гидродинамическое буксируемое тело, обладающее приблизительно нейтральной плавучестью, состоящее из конструкционного пластика или эквивалентного материала и содержащее симметричную компоновку поршней с компенсацией давления, которые приводятся в действие генератором электромагнитной силы с подвижным якорем (т.е. переменным магнитным сопротивлением). Поршни могут обладать многочисленными геометриями, например, плоской, конической выпуклой или комбинацией этих геометрий. Симметрия, присущая компенсационной компоновке поршней, в идеале, приводит к образованию виртуального узла, расположенного в геометрическом центре преобразователя, что обеспечивает признак подавления ускорения, который избавляет от необходимости в реактивной массе, существенно снижает общую массу излучателя, и гарантирует, что устройство демонстрирует характеристики излучения, присущие монополю, а не диполю. Поршни имеют надлежащий размер для предотвращения кавитации, податливо подвешены и защищены от проникновения морской воды. В поршнях используется материал с высоким отношением предела прочности к массе при значительном коэффициенте механических потерь для минимизации резонансного усиления любого внеполосного шума (т.е. частот более 100 Гц).
Основная резонансная частота комбинированной системы поршень-якорь составляет от нескольких герц до десятков герц, в связи с чем, поршни будут отклоняться внутрь под действием гидростатического давления. Типичные отклонения могут превышать максимальное допустимое динамическое смещение, связанное с агрегатом поршень-якорь, поэтому применяется система компенсации давления, функция которой состоит в регулировке подачи газа высокого давления (т.е. воздуха, азота и т.д.) к задней стороне поршней, чтобы равнодействующая статическое сила на поршнях была равна нулю. Газ поступает через клапанную систему из нескольких накопительных резервуаров высокого давления, которые содержатся в буксируемом теле. Резервуары либо являются автономными блоками, либо соединены с исследовательским судном кабель-тросом, что позволяет пополнять их по мере опустошения. Предполагается, что эта архитектура позволяет обходить любые возможные проблемы латентности, которые могут возникать, если газ компенсации поступает исключительно от исследовательского судна, которое может располагаться на расстоянии до 1 км от излучателя. Клапанная система приводится в действие с использованием системы управления с обратной связью, которая реализуется и контролируется компьютером, расположенным в буксируемом теле. Система управления устанавливает внутреннее давление газа таким образом, чтобы дифференциальное давление, измеренное датчиками, расположенными внутри и вне излучателя, было равно нулю. Соответственно, система компенсации давления является системой для точной регулировки статического положения каждого агрегата поршень-якорь. Таким образом, при условии, что газ компенсации содержится в единичном корпусе, он действует на каждый поршень одновременно, но может не возвращать каждый агрегат поршень-якорь точно в нейтральное положение в результате механической обработки и допусков агрегата. Возвращение агрегата поршень-якорь в точное нейтральное положение обеспечивает дополнительную пользу для максимизации динамического смещения поршня. Это осуществляется наложением смещения DC на сигнал возбуждения AC, подаваемый на катушку (т.е. обмотку), связанную с каждым агрегатом поршень-якорь. Смещение DC регулируется компьютером, расположенным в буксируемом теле. Система управления устанавливает смещение DC таким образом, чтобы физическое расстояние, измеренное посредством LVDT (или каким-либо эквивалентным датчиком), расположенным между агрегатом поршень-якорь (т.е. движущимся компонентом) и статором (т.е. неподвижным компонентом) поддерживалось в пределах заранее определенного значения.
В отсутствие какого-либо компенсационного средства, механическая добротность (Q), связанная с основным резонансом комбинированного агрегата поршень-якорь, может быть недопустимо высокой, и что обуславливает необходимость в системе управления с обратной связью по скорости ограниченного диапазона для существенного снижения Q. Таким образом, динамическое движение агрегата поршень-якорь (и, следовательно, динамического диапазона излучателя) остается в разумных пределах, и фазовая характеристика при прохождении резонанса не демонстрирует нарушения непрерывности. Сигнал обратная связь выводится из разности между выходами акселерометра, расположенного на агрегате поршень-якорь, и акселерометра, расположенного на статоре. До этапа дифференцирования каждого акселерометра сигнал интегрируется по времени для преобразования ускорения в скорость. По завершении этих начальных этапов, измеренный сигнал поступает на контроллер, где он объединяется с сигналом управления для возбуждения преобразователя на входном каскаде усилителя мощности, который располагается в буксируемом теле. Разность между этими двумя сигналами обеспечивает дополнительное гашение в резонансной области устройства. Она также обеспечивает в некоторой степени управление гармоническими искажениями спектральных компонент, попадающих в полосу управления системы.
Архитектура системы управления для преобразователя, применяемого в излучателе, также содержит встроенный фильтр адаптивной компенсации. Этот фильтр управляет общим коэффициентом усиления и умеренными нарушениями передаточной функции между выходным напряжением генератора формы волны и ускорением излучающего поршня в целях достижения точности выходной формы волны и точного управления уровнем, повторяемости и хорошей согласованности между поршнями в любом данном блоке и между несколькими блоками, применяемыми в передающем массиве. Дополнительно, фильтр адаптивной компенсации гарантирует, что излучаемый массивом сигнал дальнего поля, по существу, эквивалентен суперпозиции всех элементов массива, действующих синфазно с одной и той же интенсивностью источника. Альтернативно, фильтр адаптивной компенсации также можно использовать для взвешивания амплитудной и фазовой характеристики каждого излучателя для достижения нужной диаграммы направленности.
Иллюстративный фильтр адаптивной компенсации содержит два компонента каскадного фильтра: (1) всечастотный, обладающий плоской амплитудной характеристикой, фильтр с бесконечной импульсной характеристикой (IIR) с частотно-зависимым изменением фазы, и (2) фильтр с конечной импульсной характеристикой (FIR) с коэффициентами отводов, вычисленных для минимизации среднеквадратической ошибки, связанной с разностью между фактической и идеальной скоростью поршня, в частотном диапазоне, представляющем интерес. Фактическая (т.е. абсолютная) скорость поршня выводится из разности между акселерометром, расположенным на агрегате поршень-якорь, и акселерометром, расположенным на статоре. Идеальная скорость поршня является сигналом (т.е. командой) управления, который передается от исследовательского судна к излучателю. Выходной сигнал компенсационного фильтра объединяется с выходным сигналом контроллера с обратной связью по скорости на входном каскаде усилителя мощности, который используется для возбуждения преобразователя. Система управления в целом реализуется и контролируется компьютером, расположенным в буксируемом теле.
Несмотря на вышесказанное, если амплитуда и, в частности, фаза между поршнем и выходным сигналом усилителя мощности, недостаточно управляется вышеописанными способами адаптивной компенсации и обратной связи по скорости, то кроме того, управление сервопоследователями, в необязательном порядке, может применяться для повышения точности формы волны. Управление сервопоследователями также будет делать пространственно распределенный массив излучателей более устойчивым к любым вредоносным эффектам взаимного импеданса излучения (т.е. сопряжению источников) между элементами массива.
Буксируемое тело снабжено гидродинамическими управляющими поверхностями для изменения глубины погружения излучателя и поддержания надлежащего угла крена. Морская сейсморазведка обычно осуществляется на глубинах порядка от 1 до 10 м, поэтому изменение глубины излучателя на командной основе обеспечивает в большой степени гибкость системы. Кроме того, гарантированный нулевой угол крена буксируемого тела (т.е. буксируемое тело должно иметь малое или нулевое угловое смещение относительно оси буксировки, чтобы вектор силы, связанный с агрегатом поршень-якорь, был, по существу, параллелен границе раздела воздух-вода) вынуждает агрегат поршень-якорь поддерживать уровень при буксировке. Это делается таким образом, что земное тяготение не может приводить к статическому отклонению поршней от их нейтрального положения, которая, в целом, управляется уравниванием внутреннего и внешнего статического давления, а также подачей смещения DC на катушки возбуждения. Система статического позиционирования, упомянутая ранее для агрегата поршень-якорь также действует в согласовании с гидродинамическими управляющими поверхностями для коррекции любых отклонений агрегата поршень-якорь, обусловленных небольшого статического или динамического возмущения крена буксируемого тела.
Команды изменения глубины от исследовательского судна поступают на систему управления с обратной связью, которая приводит в действие приводные двигатели, которые перемещают управляющие поверхности, чтобы они изменяли глубину буксируемого тела. Иллюстративная система управления, которая реализуется и контролируется компьютером, расположенным в буксируемом теле, отслеживает глубину погружения с использованием внешне расположенного датчика давления и регулирует положение управляющих поверхностей, соответственно, пока не будет достигнута и поддерживаться нужная глубина. Та же архитектура системы управления используется для поддержания надлежащего угла крена, в которой универсальная команда нулевого угла крена передается от исследовательского судна к излучателю, и сравнения с измеренным углом крена с использованием датчика ориентации, расположенного в буксируемом теле. Управляющие поверхности приводятся в действие системой управления с обратной связью, пока разность между предписанным углом крена и выведенным из датчика ориентации не будет равна нулю. Заметим при этом, что буксируемое тело снабжено килем (т.е. буксируемое тело имеет центр водоизмещения, расположенный выше центра тяжести), что обеспечивает восстанавливающий момент для поддержания нулевого угла крена. Гидродинамические управляющие поверхности, используемые совместно с системой управления с обратной связью, применяются для обеспечения дополнительного упрочнения киля и, в частности, для активного подавления колебаний крена и динамических возмущений в более короткие интервалы времени, чем было бы в случае использования только киля.
Как упомянуто выше, излучатель опирается на генератор силы с подвижным якорем в качестве основного средства преобразования, которое приводит в движение компенсационную (т.е. симметричную) компоновку поршней изменяющимся со временем по гармоническому закону сигналом для излучения звука. В отличие от традиционных методов, генератор силы с подвижным якорем, согласно аспектам настоящего изобретения, опирается на новую конструкцию магнитной цепи, пригодную для симметричного размещения поршней. Раскрытая конструкция магнитной цепи объединяет четыре так называемые E-образные многослойные структуры в одну монолитную многослойную структуру, известную как цепь центральной пластины, или статор.
Размещение E-образных многослойных структур симметрично относительно геометрического центра цепи центральной пластины, что позволяет использовать магнитную симметрию, связанный с магнитным потоком AC и DC, который обеспечивается четырьмя обмотками и четырьмя постоянными магнитами. Магнитный поток AC генерируется, когда на обмотки подается изменяющийся со временем по гармоническому закону ток от усилителя мощности. Направление, в котором магнитный поток течет через цепь, зависит от того, каким образом намотаны обмотки, а также фазирования сигнала AC. Магнитный поток DC генерируется постоянными магнитами с направлением, которое зависит от физической ориентации и полярности магнитов.
Магнитная цепь также содержит полюс внутренней пластины, которая аналогична I-образной многослойной структуре, согласно вышеописанным методам. Полюс внутренней пластины образует якорь и снабжен линейным ведущим валом и подшипниками, которые физически поддерживаются цепью центральной пластины или некоторой промежуточной структурной. Заметим при этом, что термин "линейный ведущий вал" предусматривает возвратно-поступательное движение агрегата подвижного якоря. Преобразователь снабжен двумя полюсами внутренней пластины, каждый из которых, в свою очередь, соединен с поршнем через ведущий вал. Полюс внутренней пластины совместно с постоянными магнитами и обмотками стратегически расположены в открытых пространствах цепи центральной пластины для обеспечения результативного и эффективного пути течения магнитного потока AC и DC (т.е. эти компоненты имеют чрезмерно низкое магнитное сопротивление, низкие потери на вихревых токов и имеют низкую степень отклонения силовых линий). Фазирование магнитных потоков AC и DC создает градиент силы в физических зазорах, которые располагаются между цепью центральной пластины и полюсом внутренней пластины что, в свою очередь, приводит к тому, что агрегаты якоря перемещаются из своего нейтрального положения и прилагают динамические силы к соответствующим поршням. Заметим при этом, что обмотки и магниты располагаются симметрично относительно полюса внутренней пластины (т.е. якоря) в попытке создания уравновешенных сил, когда он совершает колебательное движение. Это делается таким образом, что механическое движение якоря является прямым аналогом формы волны, подаваемой на обмотку. Это способствует низкой степени гармонического искажения.
Ниже приведены математические термины для обеспечения дополнительного пояснения физических основ, связанных с механизмом преобразования. В этом примере нужно анализировать лишь половину магнитной цепи, поскольку преобразователь использует симметрию. Итак, для электромагнитного (т.е. с переменным магнитным сопротивлением) преобразователя, где используется воздушный зазор между двумя магнитными полюсами, сила в воздушном зазоре равна F=Φ2/2μ0A, где Φ - магнитный поток, μ0 - магнитная проницаемость вакуума, и A - средняя площадь зазора по нормали к линии центрального потока через зазор. Это уравнение утверждает, что сила является нелинейной функцией магнитного потока. Для рассматриваемого преобразователя, полюс внутренней пластины располагается в цепи центральной пластины таким образом, что он имеет воздушный зазор по обе стороны. Кроме того, ввиду физического размещения обмотки, постоянных магнитов и полюса внутренней пластины в цепи центральной пластины, один из воздушных зазоров имеет магнитный поток AC и DC, текущий в одном и том же направлении, и другой имеет магнитный поток AC и DC, текущий в противоположном направлении. Суперпозиция магнитных потоков AC и DC, которые текут через цепь, транслируется в градиент силы, который прилагается к полюсу внутренней пластины. Это можно выразить математически как F=[(ΦDC+ΦAC)2- (ΦDC-ΦAC)2]/2μ0A, где ΦAC и ΦDC - магнитные потоки AC и DC, соответственно. Здесь члены в скобках представляют магнитный поток, связанный с каждым воздушным зазором. Кроме того, уравнение можно упростить до F=2ΦACΦDC/μ0A, согласно которому сила линейно зависит от магнитного потока AC и DC. Дополнительно, поскольку магнитный поток и магнитное поле связаны уравнением Φ=BA, где B - магнитное поле, силу на полюсе внутренней пластины можно выразить как F=2ABACBDC/μ0. Наконец, в первую очередь, согласно закону Ампера, магнитное поле B, сопряженное с проводом, пропорционально току I, текущему по проводу. Это указывает, что магнитная сила, прилагаемая к полюсу внутренней пластины и, следовательно, агрегату поршень-якорь, линейно зависит от тока AC, подаваемого на обмотку от усилителя мощности. Этот конструктивный признак является критическим инициатору технологии для создания высокой, линейной действующей силы на единицу объема преобразующего материала.
Геометрия полюсов, связанных со статором и якорем, может адаптироваться для повышения эксплуатационных показателей излучателя. Особенно важно считать, что возвращающая сила, связанная с магнитной пружиной, которая существует между полюсами, положительна и нелинейна. Таким образом, при нормальных условиях эксплуатации, равнодействующая возвращающая сила на агрегате поршень-якорь в значительной степени зависит от магнитной пружины, связанной с полюсами, механической пружины, связанной с гибкой подвеской, и акустической пружины, связанной с газом под давлением, содержащимся в корпусе. Равнодействующую возвращающую силу можно выразить как Fnet=Fmag-Fmech-Facs, где Fmag - возвращающая сила, связанная с магнитной пружиной, Fmech - возвращающая сила, связанная с механической пружиной, и Facs - возвращающая сила, связанная с акустической пружиной. В случае, когда равнодействующая возвращающая сила больше или равна нулю, излучатель может начинать работать нестабильно, что приводит к блокировке якоря (т.е. магнитная возвращающая сила между полюсами будет блокировать якорь и статор друг с другом). Эта ситуация усугубляется тем, что возвращающая сила, связанная с магнитной пружиной, нелинейна и обратно пропорциональна расстоянию разделения между полюсами, в том смысле, что магнитная возвращающая сила максимальна, когда физическое отклонение якоря максимально.
В контексте требования к поршню совершать относительно большие смещения для генерации низкочастотного звука высокой амплитуды в воде, желательно минимизировать возвращающую силу, связанную с магнитной пружиной в практических пределах. Это можно осуществлять сужением полюсов, связанных с якорем и статором вместо использования квадратной геометрии. Таким образом, в типичных конструкциях магнитной цепи с переменным магнитным сопротивлением, геометрия полюсов является квадратной и поэтому приводит к относительно высокой возвращающей силе, развиваемой магнитной пружиной в результате того, что вектор магнитного потока, связанный с полюсами, коллинеарен вектору смещения, связанному с якорем. В случае конусообразных полюсов составляющая вектора магнитного потока направлена перпендикулярно вектору смещения, что снижает возвращающую силу, связанную с магнитной пружиной. По тем же причинам жесткость магнитной пружины остается линейной в более широком диапазоне смещений якоря, приводя к снижению гармонических искажений, особенно на низких частотах. Заметим при этом, что для правильной работы этого принципа пары полюсов содержат совпадающие сужающиеся геометрии, которые приблизительно напоминают геометрию конусообразного пальцевого соединения, широко используемого в столярном ремесле. Это легко понять, обратившись к чертежам, где детально представлена геометрия полюсов.
Магнитный материал, применяемый в цепи центральной пластины (т.е. статоре) и полюсе внутренней пластины (т.е. якоре) можно выбирать в соответствии с определенными инженерными задачами. Хотя многочисленные магнитные материалы доступны для использования, кремнистые и кобальтовые стали пригодны для раскрытого здесь генератора силы. Текстурованная кремнистая сталь, имеющая в своем составе от 3,0 до 3,5% кремния, предпочтительна для пластин с учетом стоимости, потерь на вихревые токи, эффектов отклонения силовых линий и других параметров. Типичный состав, отвечающий этому стехиометрическому критерию, известен как сталь M6. Напротив, с учетом веса пластины и/или движущей силы якоря (т.е. блокированной силы), предпочтительна кобальтовая сталь, содержащая от 48 до 50% кобальта. Такого рода сплавы известны под торговыми марками Hiperco®, Permendur®, Vacoflux® и Vacodur®. Дополнительно, улучшение характеристик, которого позволяют достичь эти сплавы, испытываются до их точки магнитного насыщения, которая составляет 2,4 Тл для Hiperco 50® в отличие от 1,6 Тл для стали M6. Более высокая точка насыщения Hiperco 50® позволяет подавать на катушку более сильные токи возбуждения, что приводит к пропорциональному увеличению силы, действующей на якорь. Отсюда следует, что для данной номинальной силы, физический размер и вес генераторов силы, выполненных из Hiperco 50®, будет меньше, чем для выполненных из стали M6, что является привлекательной особенностью при условии, что раскрытый здесь излучатель сбрасывается с исследовательского судна.
Состав, связанный с постоянными магнитами, можно выбирать для повышения эксплуатационных показателей излучателя с упором на минимизацию его размера и веса. Магниты на основе редкоземельных элементов, например, неодим-железо-борные и самарий-кобальтовые, имеют преимущества над традиционными магнитами наподобие Alnico и Ferrite при условии, что их плотность энергии, задаваемая параметром (BH)max, где B - плотность магнитного потока, и H - напряженность магнитного поля, обычно на порядок выше. Это позволяет создавать компактные, легкие магниты для минимизации общего размера и веса излучателя.
Калибр провода, используемый в катушке возбуждения, совместно с геометрией его поперечного сечения можно выбирать для минимизации его вклада в общий размер и вес излучателя, а также минимизации тепловых потерь. Чтобы понять это, рассмотрим различие между генераторами силы на основе принципов электромагнитного и электродинамического преобразования. В первом случае катушка возбуждения обычно прикреплена к статору, тогда как в последнем случае катушка возбуждения обычно прикреплена к якорю (т.е. так называемая звуковая катушка). Когда катушка прикреплена к статору, можно использовать относительно небольшое количество витков провода большого калибра, что приводит к относительно низким электрическому сопротивлению и тепловым потерям. Напротив, когда катушка прикреплена к якорю, необходимо сравнительно больше витков провода значительно меньшего калибра, что приводит к относительно высоким электрическому сопротивлению и тепловым потерям. Дополнительно, якорь утяжеляется за счет катушки, что, в свою очередь, влияет на требования к силе, связанные с магнитной цепью. Наконец, плотность упаковки, связанную с вышеупомянутым проводом большого калибра, можно оптимизировать, применяя прямоугольное поперечное сечение (т.е. провод, напоминающий ленту) вместо круглого. Катушки возбуждения, демонстрирующие относительно высокую плотность упаковки, способствуют минимизации общего размера и веса излучателя.
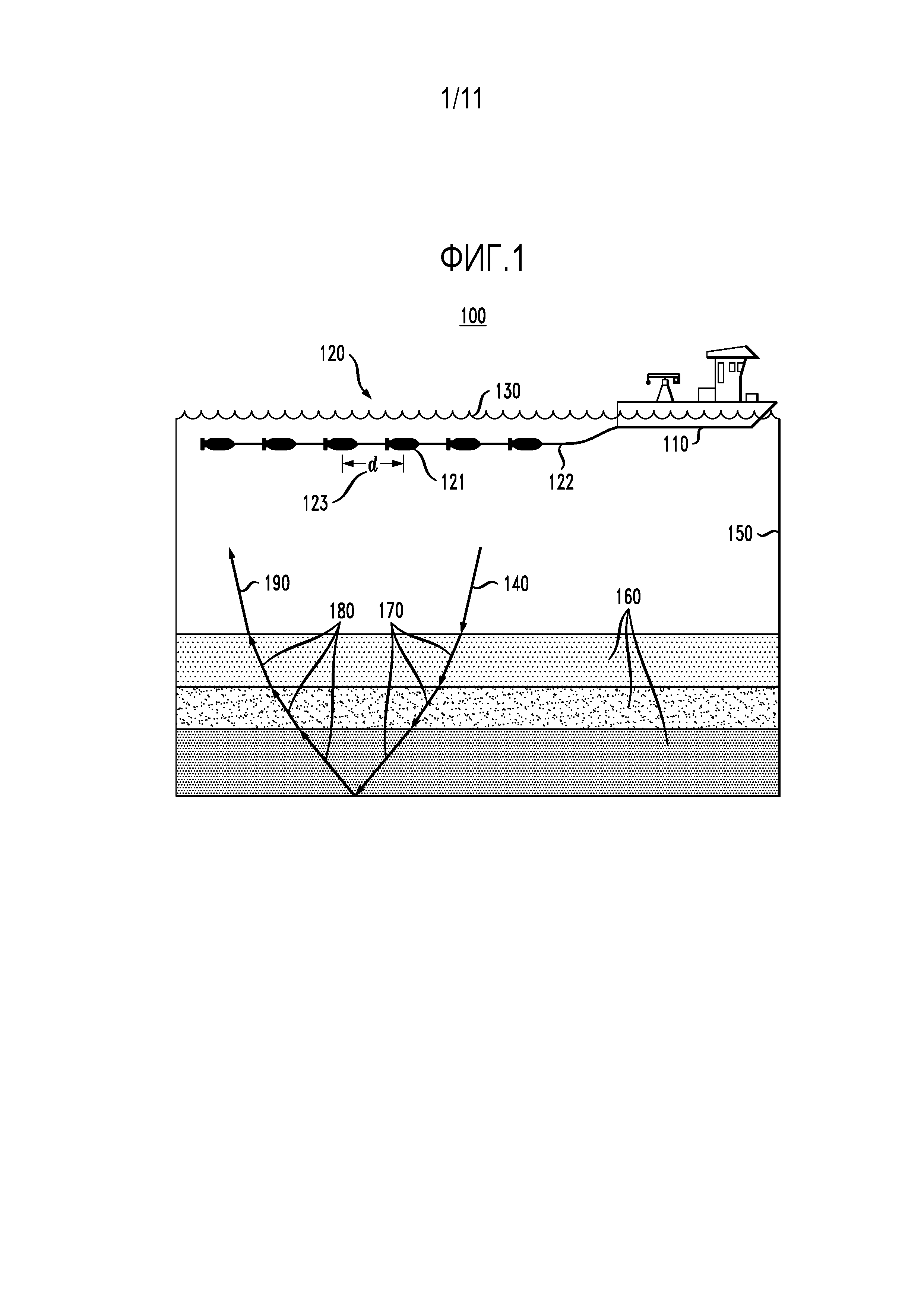
Фиг. 1 представляет вид спереди, где показан общий принцип использования когерентного источника звука в морской сейсморазведке 100, который представляет иллюстративный вариант осуществления настоящего изобретения. Исследовательское судно 110 буксирует полностью интегрированный массив 120, содержащий звукоизлучатели 121, с использованием несущего кабель-троса 122 под поверхностью 130 воды. Физическое разнесение между излучателями 123 равно d, обычно составляющее не более половины акустической длины волны на самой высокой частоте, представляющей интерес. Когда элементы массива запитываются изменяющимся со временем по гармоническому закону сигналом, они генерируют волну 140 сжатия, которая распространяется в толще 150 воды и падает на многослойные среды, образующие морское дно 160. Волна сжатия передается в слоистые среды как несколько продольных волн 170 и 180 и, в итоге, возвращается в морскую воду в виде волны 190 сжатия, которая регистрируется приемным массивом, не показанным на фигуре. Заметим при этом, что приведенное здесь описание физика распространения звука значительно упрощено в целях наглядности и краткости и не вдается принцип генерации поперечной волны и отражений на каждом слое.
Фиг. 2 представляет системную схему 200, где показаны общие функциональные возможности системы, которая представляет иллюстративный вариант осуществления настоящего изобретения. Это всего лишь иллюстративная конфигурация, призванная демонстрировать гипотетическое размещение массива, основных компонентов, используемых для управления массивом, и соответствующих каналов электрической мощности и данных (например, команд и состояния оборудования). Системная схема 200 делится на две основные подсистемы, содержащие компоненты, связанные с массивом 210 излучателей и исследовательским судном 220. Массив 210 излучателей представляет собой плоскую конфигурацию из 20 элементов, расположенных в 4 строках и 5 столбцах. Каждый излучатель 211 является полностью интегрированным устройством, содержащим средство преобразования, системную электронику, средство компенсации гидростатического давления, средство статического позиционирования для агрегата поршень-якорь и гидродинамические управляющие поверхности, которые объяснены в последующих чертежах. Элементы каждой строки соединены друг с другом и с исследовательским судном 220 с использованием несущего кабель-троса 212. Здесь кабель-трос 212 является средством буксирования каждой строки излучателей исследовательским судном 220, и средством передачи электрической мощности, сжатого воздуха и данных (например, команд и состояния оборудования). Основные компоненты на борту исследовательского судна 220 включают в себя главный компьютер 221, который выступает в роли центрального органа управления всей системы, главный источник питания 222, который подает электрическую мощность на массив, и соединительные узлы 223, которые выступают в роли физического и электрического соединения для кабель-тросов 212. В этом примере, система сконфигурирована с четырьмя соединительными узлами 223a, 223b, 223c и 223d, которые выступают в роли точки соединения для кабель-тросов 212a, 212b, 212c и 212d.
Фиг. 3 представляет системную схему 300, где указаны основные функциональные возможности единичного интегрированного узла излучателя, который представляет иллюстративный вариант осуществления настоящего изобретения. Представлена упрощенная схема, где для краткости и наглядности исключены дублирующие компоненты. Основными компонентами, связанными с излучателем, являются компьютер 310, который выступает в роли локального органа управления для системы, цепь 320 распределения мощности DC, которая регулирует и распределяет мощность, принятую от исследовательского судна, показанного на фиг. 2, усилитель мощности 330, который возбуждает преобразователь 340 когерентной формой волны, необходимой для разведки, и обеспечивает смещение DC для облегчения регулировок статического положения агрегата поршень-якорь, резервуар 350 для газа под давлением и клапанную систему 360 для подачи гидростатического давления компенсации на преобразователь 340, и управляющую поверхность 370, которая обеспечивает средство для изменения глубины излучателя и поддержания надлежащего угла крена при буксировке. Кабель-трос 380 используется для передачи электрической мощности, газа под давлением и данных (например, команд и состояния оборудования) между исследовательским судном, показанным на фиг. 2, и интегрированным излучателем, показанным на фиг. 3. Газ под давлением, подаваемый с исследовательского судна, в основном, используется для добавления газа в накопительный резервуар, однако клапанную систему можно конфигурировать так, чтобы газ от исследовательского судна поступал непосредственно на излучатель.
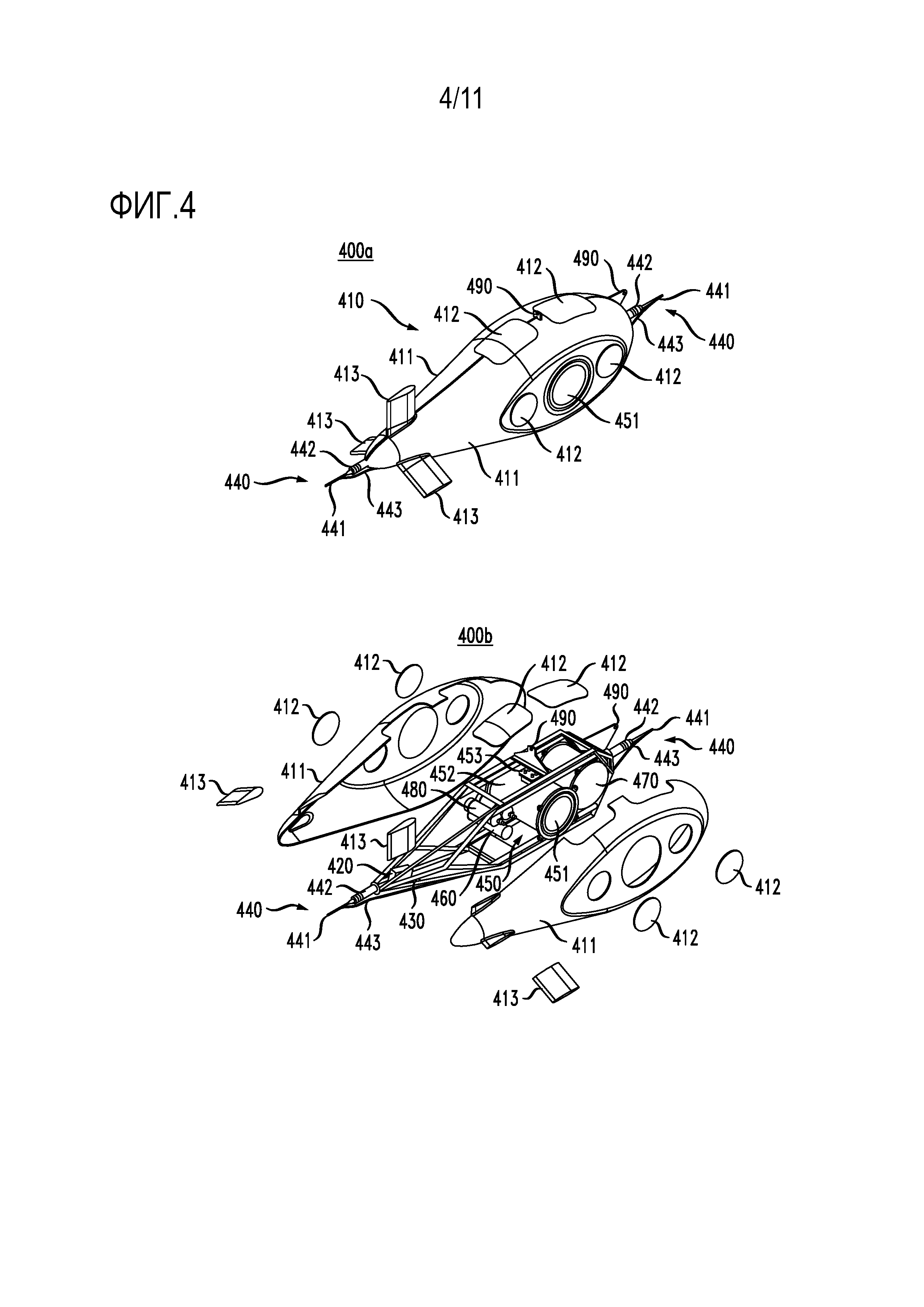
Фиг. 4 представляет полностью собранные и разобранные виды 400a и 400b в изометрической проекции, демонстрирующие узел полностью интегрированного излучателя, который представляет иллюстративный вариант осуществления настоящего изобретения. В качестве излучателя используется буксируемое тело 410 гидродинамической формы (т.е. обтекаемой формы), состоящее из двух оболочек 411, несколько портов 412 доступа и управляющие поверхности 413. Порты 412 доступа применяются для облегчения ремонтных работ, осуществления профилактического обслуживания и т.д. компонентов, находящихся в буксируемом теле. Управляющие поверхности 413 обеспечивают средство для изменения глубины буксируемого тела и поддержания надлежащего угла крена при буксировке. Положение управляющих поверхностей 413 регулируется компьютерно-управляемым приводом 420. Буксируемое тело 410 выполнено из конструкционного пластика, полностью или частично имеет воздушную поддержку, что обеспечивает приблизительно нейтральную плавучесть и обеспечивает пространство для скелета 430, которая выступают в роли монтажной конструкции для внутренних компонентов и точки присоединения для несущего кабель-троса 440. При буксировке излучателя все тяговые усилия передаются от кабель-троса 440 раме 430. Кабель-трос 440 дополнительно состоит из интегрированного кабельного агрегата 441, разъема 442 и предохранительного конца 443 для предотвращения потери буксируемого тела в случае обрыва кабеля 441 или разъема 442. Интегрированный кабельный агрегат 441 содержит защитный элемент, электрические проводники, оптоволоконную телеметрическую линию связи и газовый шланг. Основное средство 450 преобразования располагается в или вблизи центра тяжести буксируемого тела и содержит компенсационную (т.е. симметричную) компоновку поршней 451, которые механически приводятся в действие генератором силы с подвижным якорем, содержащимся в цилиндрическом корпусе 452. Поршни податливо подвешены и герметизированы водонепроницаемым образом и имеют надлежащий размер для предотвращения кавитации. Коммутационная панель 453 выступает в роли системного интерфейса между преобразователем и другим оборудованием в узле, который включает в себя комплект компьютерно-управляемой электроники, содержащийся в цилиндрическом корпусе 460, систему распределения мощности DC и двухканальный усилитель мощности, содержащийся в цилиндрическом корпусе 470, и средство 480 компенсации давления, содержащее накопительные резервуары для газа высокого давления и клапанную систему. Компьютер имеет локальный орган управления помимо всех компонентов в интегрированном излучателе, но принимает команды от главного компьютера на борту исследовательского судна на фиг. 2. Подъемные проушины 490 используются в целях транспортировки и развертывания излучателя без приложения точечных нагрузок к буксируемому телу. Силы, прилагаемые к подъемным проушинам 490, передаются раме 430. Хотя это не показано на фиг. 4, в качестве альтернативного материала буксируемого тела используются сплошные блоки синтетической пены или пены с закрытыми ячейками для минимизации любого вредоносного влияния граничного условия приближенного сброса давления, которое буксируемое тело представляет акустическому полю, излучаемому поршнями 451. Кроме того, пеноблоки будут формоваться или механически обрабатываться надлежащим образом для размещения всех внутренних компонентов и позволяют упрощать конструкцию рамы 430 поскольку пена имеет достаточную величину структурной жесткости.
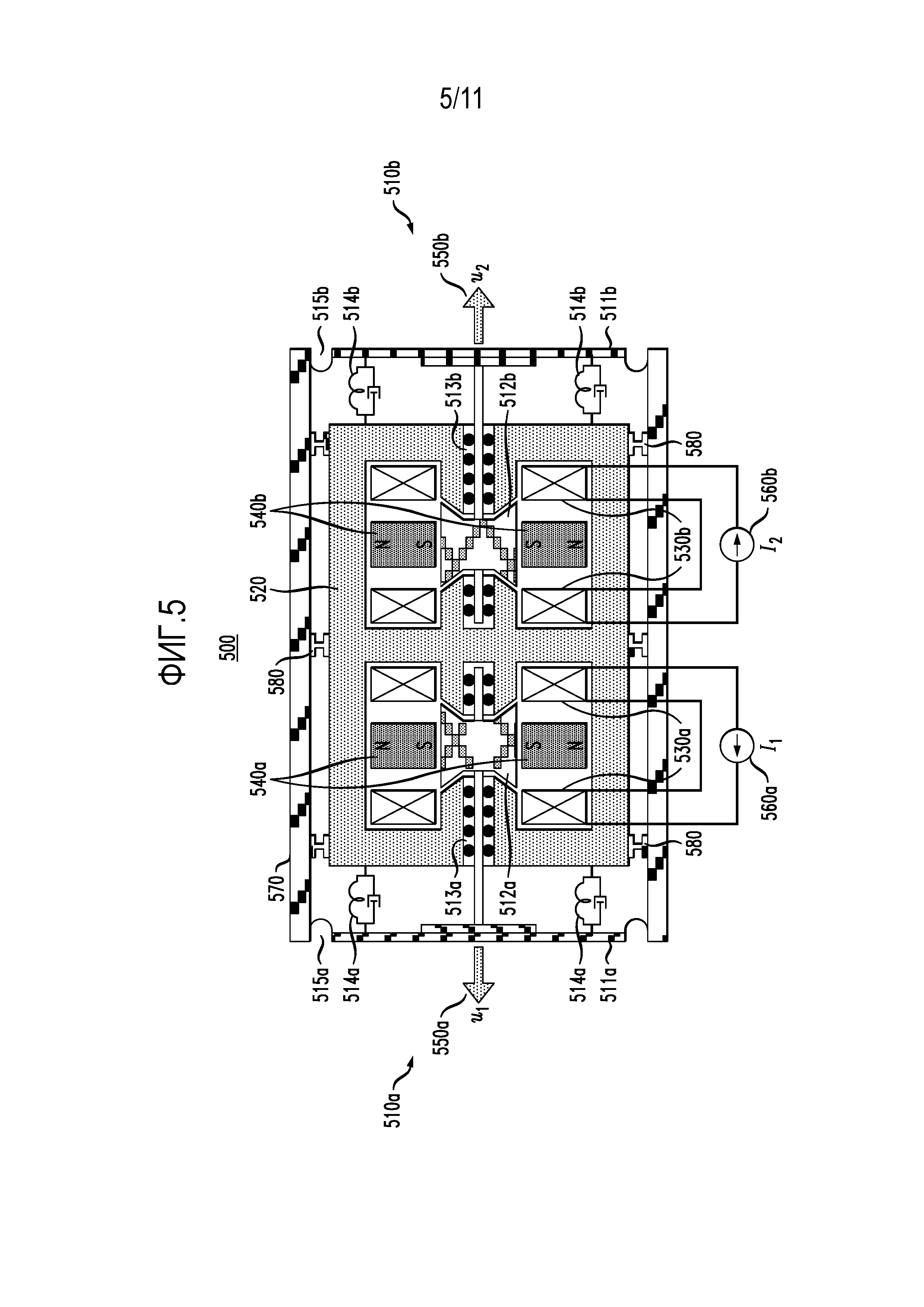
Фиг. 5 представляет функциональный вид в разрезе основного средства 500 преобразования, связанного с узлом полностью интегрированного излучателя, показанного на фиг. 3 и фиг. 4, который представляет иллюстративный вариант осуществления настоящего изобретения. Компенсационная компоновка агрегатов 510a и 510b поршень-якорь располагаются вокруг основы цепи центральной пластины (т.е. статора) 520. Агрегаты 510a и 510b поршень-якорь дополнительно состоят из плоских круглых поршней 511a и 511b, полюсов внутренней пластины (т.е. якорей) 512a и 512b, линейных агрегатов ведущий вал/подшипник 513a и 513b, амортизированных механических подвесных пружин 514a и 514b и сальников 515a и 515b катящегося элемента. Симметрия, присущая компенсационной компоновке агрегатов 510a и 510b поршень-якорь, приводит к образованию виртуального узла, расположенного в геометрическом центре цепи 520 центральной пластины, что обеспечивает признак подавления ускорения, избавляя от необходимости в реактивной массе, существенно снижая общую массу излучателя и гарантируя, что устройство демонстрирует монопольные, а не дипольные, характеристики направленности. Поршни 511a и 511b имеют надлежащий размер для предотвращения кавитации, причем динамическое давление, излучаемое с активного конца, существенно ниже, чем статическое давление, связанное с погружением морскую воду. Дополнительно, для поршней 511a и 511b используется материал с высоким отношением предела прочности к массе при значительном коэффициенте механических потерь, чтобы гарантировать, что первый изгибной резонанс активных излучающих поверхностей значительно выше самой высокой частоты, представляющей интерес, и обеспечить достаточный уровень гашения, чтобы гарантировать, что никакие присутствующие резонансные моды вне полосы шума (т.е. гармоническое искажение) заметно не усиливаются. Электрические катушки (т.е. обмотки) 530a и 530b и постоянные магниты 540a и 540b стратегически располагаются в открытых пространствах цепи 520 центральной пластины парами, благодаря чему, они имеют симметричную компоновку относительно их соответствующего полюса внутренней пластины (т.е. якоря) 512a и 512b. Физическая симметрия транслируется в электромагнитную симметрию и приводит к тому, что скорости 550a и 550b поршней прямо аналогичны электрическим токам 560a и 560b, подаваемым на катушки 530a и 530b. Это размещение способствует снижению степени гармонического искажения. Цилиндрическая оболочка 570 используется для заключения преобразователя и содержит ребра (или некоторое эквивалентное средство) 580 как для упрочнения оболочки, так и для использования в качестве места монтажа для цепи 520 центральной пластины.
Фиг. 6 представляет схему 600, демонстрирующую, как основное средство преобразования преобразует магнитный поток AC и DC в динамическую силу и скорость, согласно иллюстративному варианту осуществления настоящего изобретения. Генератор силы состоит из цепи 610 центральной пластины (т.е. статора), полюсов внутренней пластины (т.е. якорей) 620a и 620b, линейных агрегатов 630a и 630b ведущий вал/подшипник, обмоток 640a и 640b и постоянных магнитов 650a и 650b. Заметим, что обозначения 'a' и 'b' в ссылочных позициях указывают левую и правую стороны преобразователя. Компоненты, обозначенные буквами 'a' и 'b', идентичны, что, в свою очередь, транслируется в симметрию сил относительно геометрического центра цепи 610 центральной пластины, благодаря чему, она становится механически устойчивой структурой и, таким образом, виртуальным узлом подавления ускорения. Магнитный поток AC 660a и 660b генерируются, когда обмотки 640a и 640b запитываются изменяющимся со временем по гармоническому закону сигналом AC. Направление магнитного потока 660a и 660b зависит от того, каким образом обмотки 640a и 640b намотаны вокруг цепи 610 центральной пластины, а также фазирования сигнала AC. Магнитный поток DC 670a и 670b генерируются магнитами 650a и 650b с направлением, которое зависит от физической ориентации и полярности магнитов. Фазирование магнитных потоков AC и DC 660a, 660b, 670a и 670b создает градиент силы в зазорах 680a и 680b, что, в свою очередь, приводит к тому, что агрегаты якоря перемещаются из своего нейтрального положения с динамическими силами 690a и 690b. Под действием этих сил якоря 620a и 620b и линейные приводные валы 630a и 630b совершают возвратно-поступательное движение со скоростью 695a и 695b. Дополнительный магнитный поток DC генерируется, когда обмотки 640a и 640b запитываются смещением DC, что приводит к изменению статического положения якорей 620a и 620b.
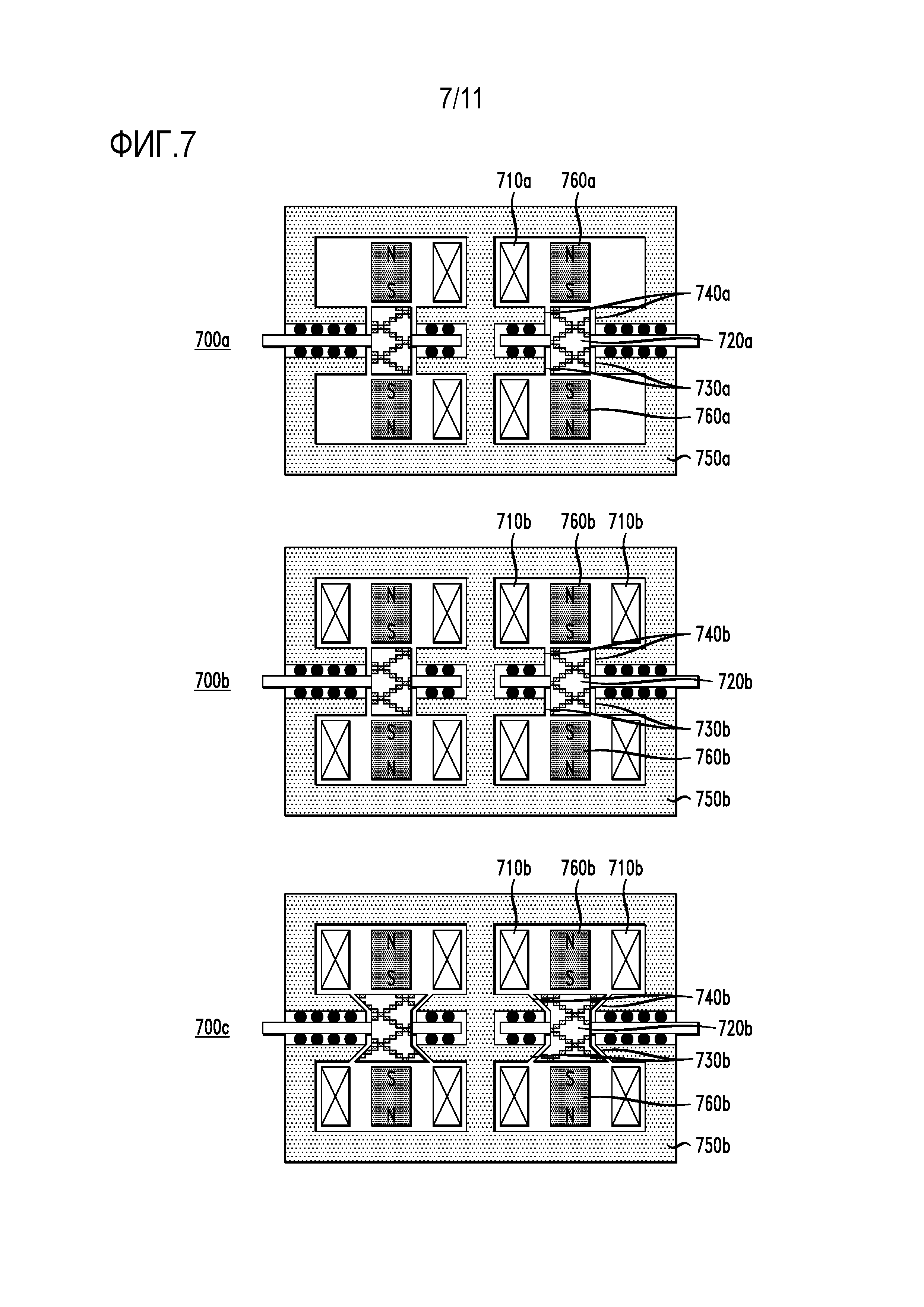
Фиг. 7 представляет схемы 700a, 700b и 700c, где сравниваются и противопоставляются три различных варианта осуществления основного средства преобразования в соответствии с количеством обмоток (т.е. электрических катушек) для каждого якоря (т.е. полюса внутренней пластины) и геометрией полюсов, связанных с якорем и статором (т.е. цепью центральной пластины). Схема 700a демонстрирует вариант осуществления, содержащий по одной обмотке 710a на якорь 720a совместно с квадратными геометриями 730a и 740a полюсов для якоря 720a и статора 750a, соответственно, схема 700b полюсов демонстрирует вариант осуществления, содержащий по две обмотки 710b на якорь 720b совместно с квадратными геометриями 730b и 740b полюсов для якоря 720b и статора 750b, соответственно. Схема 700c демонстрирует вариант осуществления, содержащий по две обмотки 710c на якорь 720c совместно с конусообразными геометриями 730c и 740c полюсов для якоря 720c и статора 750c, соответственно. Общим для вариантов осуществления, изображенных в схемах 700a, 700b и 700c, является постоянные магниты 760a, 760b и 760c, соответственно. Использование двух обмоток вместо одной гарантирует, что механическая сила, связанная с перемещениями якоря наружу и внутрь, является прямым аналогом тока возбуждения AC, подаваемого на обмотку. Это утверждается после размещения обмоток и магнитов симметричным образом относительно якоря в спаренных агрегатах. Использование конусообразной вместо квадратной геометрии полюсов для якоря и статора снижает степень нелинейности (и, следовательно, гармоническое искажение) в системе и снижает вероятность блокировки якоря. По этим причинам варианты осуществления, раскрытые в схемах 700a, 700b и 700c, оцениваются как хорошие, лучшие и наилучшие, соответственно. Дополнительно, схема 700c рассматривается как представляющая иллюстративный вариант осуществления настоящего изобретения.
Фиг. 8 представляет схемы 800a и 800b цепи с сосредоточенными параметрами, которые представляют иллюстративный вариант осуществления настоящего изобретения и, в частности, вариант осуществления, показанный на фиг. 5. Схема 800a цепи является обобщенным представлением излучателя для случая излучателей компенсационного поршня, имеющих произвольный размер и возбуждаемых агрегатами преобразователя с подвижным якорем, которые не обязательно идентичны. В этом представлении излучатель излучает в свободном пространстве в объемном угле 4π стерадиан. Дополнительно, элементы цепи с сосредоточенными параметрами, обозначенные нижними индексами 1 и 2, указывают первый и второй поршни и связанные с ними агрегаты преобразователя с подвижным якорем, соответственно. Аналогично, нижние индексы e, m и a указывают элементы электрической, механической и акустической цепи, соответственно. В схеме 800a электрические и механические участки соединены идеальными гираторами, и механические и акустические участки соединены идеальными трансформаторами. В этом обобщенном представлении, поршни и связанные с ними агрегаты преобразователя с подвижным якорем физически связаны через комбинированную механическую массу, связанную со статором и корпусом, а также акустическую податливость, связанную с газом компенсации давления, содержащимся в корпусе. Эти элементы цепи обозначены в схеме 800a как Mm и Ca. В ходе работы излучателя, токи I1 и I2 подаются на электрические катушки, связанные с первым и вторым агрегатами преобразователя с подвижным якорем, в результате чего, скорости u1 и u2 текут через цепь и входят в узлы 810a и 820a, соответственно. В особом случае, когда элементы цепи с нижним индексом 1, по существу, равны соответствующим элементам цепи с нижним индексом 2 (или могут быть сделаны, по существу, равными с применением системы управления надлежащей конструкции) скорости u1 и u2, по существу, равны и полностью втекают в соответствующие им шунтированные ветви, содержащие трансформаторы. Таким образом, Mm, по существу, бесконечен и представляет открытую цепь между узлами 810a и 820a. Открытая цепь транслируется в виртуальный узел/ признак подавления ускорения, упомянутый ранее в патенте. Дополнительно, при наличии открытой цепи, схема 800a демонстрирует симметрию относительно узла 830a, что позволяет представить модель сосредоточенных параметров излучателя схемой 800b цепи. В этом представлении излучатель содержит один поршень и излучает в полупространство в объемном угле 2π стерадиан. Таким образом, вообще говоря, излучатель, расположенный в свободном пространстве и имеющий компенсационную компоновку из одинаковых поршней, имеющих равные объемные скорости, эквивалентен излучателю, расположенному в полупространстве и имеющему единичный поршень с той же объемной скоростью. Это значительно упрощает анализ электроакустических параметров излучателя, поскольку известны аналитические формулы в замкнутой форме для акустического импеданса излучения многочисленных геометрий поршня с вытеснителем. В отношении схемы 800b, числовые нижние индексы для наглядности опущены, поскольку понятно, что анализ относится к одному поршню и связанному с ним агрегату преобразователя с подвижным якорем. Дополнительно, как указано в L. L. Beranek, Acoustics (Acoustical Society of America, Woodbury, NY, 1993) стр. 223, включенной сюда посредством ссылки, звуковое давление, излучаемое от поршня с вытеснителем, равно p=(|U|2RaDfρ0c/2πr2)1/2, где U - объемная скорость, текущая через акустическую ветвь цепи, Ra - акустический импеданс излучения, Df - коэффициент направленности, ρ0 и c - плотность и звук скорость окружающей текучей среды, и r - радиальное расстояние от центра поршня до точки поля. Из схемы 800b следует, что объемная скорость равна U=χI/ZeqvS, где χ - гирационная постоянная, I - ток, Zeqv - эквивалентный акустический импеданс, связанный с двигательной ветвью сети с сосредоточенными параметрами, и S - площадь поверхности стороны поршня, контактирующей с окружающей текучей средой. Параметр эквивалентного акустического импеданса дополнительно задается в виде Zeqv=Zm/S2+Za, где Zm=Rm+jωMm+1/jωсм - механический импеданс, связанный с агрегатом поршень-якорь, и где Za=Ra+jωMa+1/jωCa - акустический импеданс, связанный с излучением звука от поршня и газа компенсации давления содержащегося в корпусе. В вышеприведенных уравнениях параметры сопротивления, массы, и податливости обозначены символами R, M и C, соответственно. Также, ω - частота возбуждения и j=√-1.
Фиг. 9 представляет схемы 900a, 900b и 900c, демонстрирующие излучатель, сконфигурированный с разными поршнями. Схема 900a демонстрирует, что излучатель 910a использует идентичный набор плоских круглых поршней 910a, имеющих радиус a и толщину t. Схема 900b демонстрирует, что излучатель 910b использует идентичный набор конических поршней 920b, имеющих радиус a, высоту h и толщину t. Схема 900c демонстрирует, что излучатель 910c использует идентичный набор выпуклых поршней 920c, имеющих радиус a, высоту h и толщину t. Выбор геометрии поршня зависит от стратегии оптимизации для излучателя. Например, уменьшение силы, необходимой для приведения в движение агрегата поршень-якорь, можно понять из анализа схемы 800b цепи на фиг. 8. Таким образом, для частот, значительно превосходящих двигательный резонанс, движущая сила, необходимая для достижения предписанной скорости (и, следовательно, нужного уровня звукового давления), равна F=jω(Mm+MaS2)u. Отсюда следует, что снижение движущейся массы в системе способствует снижению требований к силе, которые можно трансформировать в более низкие требования к массе статора и электрической мощности. Иллюстративный способ снижения движущейся массы состоит в изменении геометрии поршня, поскольку излучающая масса (т.е. MaS2), связанная с поршнем, обычно очень велика для низкочастотных звукоизлучателей этого типа. В порядке примера, осуществлялся анализ конечных элементов для определения излучающей массы плоских, конических и выпуклых поршней, каждый из которых имеет радиус 35,4 см (13,9 дюймов). Осевая высота конических и выпуклых поршней была равна радиусу, указывая, что удвоенный угол раствора конического поршня равен 90°, и выпуклый поршень имеет форму полусферы. Результаты анализа указывают, что излучающая масса равна 119, 85,0 и 76,7 кг, для плоских, выпуклых и конических поршней, соответственно. Это означает снижение на 29% для плоских поршней по сравнению с коническими и снижение на 36% для плоских поршней по сравнению с выпуклыми. Дополнительно, значения, определенные для плоских и выпуклых поршней, согласуются с аналитическими формулами, представленными в C. H. Sherman and J. L. Butler, Transducers and Arrays for Underwater Sound (Springer, New York, NY, 2007), стр. 463-465, 569 и H. Suzuki and J. Tichy, ʺSound Radiation from Convex and Concave Domes in an Infinite Baffle,ʺ J. Acoust. Soc. Am., 69(1), 41-49 (1981), каждая из которых включена сюда посредством ссылки. Хотя эти метрики значительны, их следует уменьшить, исходя из того, что для данных радиуса и толщины механическая масса плоского поршня меньше, чем у конических и выпуклых поршней. Однако не предполагается, что получение этого результата будет проблемой для практических конструкций поршня. В-первых, для излучателей с подвижным якорем, сам якорь (а не поршень) обычно вносит наибольший вклад в механическую массу Mm. Во-вторых, поскольку изгибная жесткость оболочек значительно выше, чем у пластин той же толщины, толщина конических и выпуклых поршней будет меньше, чем у плоского поршня, когда их толщина позволяет гарантировать, что первая изгибная мода значительно выше частотного диапазона, представляющего интерес. Дополнительно, модель конечных элементов также использовалась для оценивания сопротивления излучения, поскольку оно оказывает прямое влияние на уровень излучаемого звукового давления. Результаты показывают, что сопротивление излучения для рассматриваемых геометрий поршней практически одинаково (т.е. изменяется меньше, чем на 1 дБ) для частот ниже 500 Гц (т.е., когда ka≤0,74, где k - акустическое волновое число). Это говорит о том, что изменения геометрии поршня не будут негативно влиять на уровень источника при условии, что частотный диапазон, представляющий интерес, номинально составляет от 5 до 100 Гц. Эти результаты, в целом, согласуются с теорией, представленной Suzuki и Tichy, для случая плоских и выпуклых поршней.
Фиг. 10 представляет схему 1000 где показано, как система компенсации давления интегрируется в излучатель, и подробно представляет различные технические датчики, которые используются системой управления для регулировки давления газа компенсации, содержащегося в корпусе, для регулировки статического положения агрегата поршень-якорь, оптимизации динамической работы агрегата поршень-якорь, изменения и поддержания глубины излучателя, и поддержания надлежащего угла крена излучателя. Эти признаки представляют иллюстративный вариант осуществления настоящего изобретения и представлены как предваряющие формальное описание и чертежи, связанные с системой управления, которые представлены далее в этом разделе.
Система компенсации давления в основном состоит из агрегатов 1010a и 1010b накопительного газового резервуара/ клапанной системы. Накопительные резервуары 1011a и 1011b подают газ под давлением во внутреннее пространство корпуса 1020 через клапанные системы 1012a и 1012b. Те же клапанные системы отводят газ из корпуса в окружающую текучую среду. Система управления определяет, подавать или отводить газ, для компенсации поршней и опираются на данные из измерителя 1013 дифференциального давление для выбора надлежащей клапанной компоновки. В нормальном режиме работы используется лишь один из агрегатов накопительный резервуар/ клапанная система. Другой агрегат остается неактивным, пока в первом есть газ. Затем клапанные системы 1012a и 1012b переключаются, чтобы задействовать неактивный блок и наполнить пустой блок газом, подаваемым от исследовательского судна через клапан 1014. Этот процесс повторяется до завершения разведки. Заметим при этом, что наличие источника газа под давлением рядом с излучателем считается преимуществом, поскольку могут возникать проблемы латентности, если газ подается исключительно от исследовательского судна, при длине кабель-троса порядка 1 км.
Как показано на фиг. 10 датчики 1030a и 1030b близости/положения располагаются в пространстве между поршнями 1040a и 1040b и дальними концами 1051a и 1051b статора 1050, соответственно. В этом примере датчики 1030a и 1030b близости/положения являются LVDT, которые представляют собой двухэлементные блоки, которые измеряют статическое положение агрегатов 1060a и 1060b поршень-якорь, соответственно, и выступают в роли входов в систему управления для перевода агрегатов в нейтральное положение. В ходе установки одна часть LVDT устанавливается на поршень, и другая часть устанавливается на дальний конец статора.
На фиг. 10 также показаны спаренные акселерометры 1070a и 1070b которые используются в связи с системой управления для оптимизации динамической работы агрегатов 1060a и 1060b поршень-якорь, соответственно. Для каждой пары, один акселерометр устанавливается на поршень, и другой устанавливается на дальний конец статора. Разность между сигналами акселерометра обеспечивает оценку абсолютного ускорения агрегата поршень-якорь. Этот этап может потребоваться в случае, когда небольшое движение статора наблюдается в результате неверно согласованных поршней и связанных с ними агрегатов преобразователя с подвижным якорем.
Наконец, на фиг. 10 показаны датчик 1080 глубины и датчик 1090 ориентации, которые используются для обеспечения входов в систему управления для регулировки глубины излучателя и поддержания надлежащего крена. Датчик 1080 глубины опирается на статическое давление окружающей текучей среды для вывода глубины излучателя. Датчик 1080 глубины располагается вне корпуса 1020 с известным возвышением относительно центра поршней 1040a и 1040b. Датчик 1090 ориентации располагается в геометрическом центре излучателя или в некотором известном положении относительно геометрического центра излучателя.
Фиг. 11 представляет схемы 1100a и 1100b, демонстрирующие архитектуру системы управления для полностью интегрированного излучателя, который представляет иллюстративный вариант осуществления настоящего изобретения. Схема 1100a представляет архитектуру для компенсации давления, управления статическим положением агрегата поршень-якорь, и приведения в действие управляющей поверхности, тогда как схема 1100b представляет архитектуру для высокоточной работы преобразователя. В отношении схемы 1100a применяется архитектура управления с обратной связью, состоящая из входа 1110a, выхода 1120a, контроллера 1130a с обратной связью, управляемого компонента 1140a, отслеживающего датчика 1150a и суммирующего блока 1160a.
Для случая системы компенсации давления, вход 1110a, выход 1120a, компонент 1140a и датчик 1150a соответствуют сигналу от датчика внешнего давления, регулируемому давлению воздуха, подаваемого на движущий поршень, клапанную систему, и сигналу от датчика внутреннего давления, соответственно. Движущий поршень компенсируется по давлению, когда разность между внутренним и внешним давлением либо равна нулю, либо отвечает некоторому заданному пользователем порогу. Операция дифференцирования осуществляется суммирующим блоком 1160a. Заметим при этом, что для всех намерений и целей практическая реализация датчиков внутреннего и внешнего давления осуществляется посредством датчика дифференциального давления, как показано на фиг. 10.
Для случая регулировки статического положения агрегата поршень-якорь, вход 1110a, выход 1120a, компонент 1140a и датчик 1150a соответствуют предписанному значению для положения агрегата поршень-якорь, смещению DC, подаваемому на обмотку, изменению статического положения агрегата поршень-якорь и сигналу от датчика близости/положения, например LVDT. Агрегат поршень-якорь располагается в надлежащем положении, когда разность между измеренным и предписанным значениями отвечает некоторому заданному пользователем порогу. Операция дифференцирования осуществляется суммирующим блоком 1160a.
Для случая приведения в действие управляющей поверхности для изменения или поддержания глубины, вход 1110a, выход 1120a, компонент 1140a и датчик 1150a соответствуют команде от исследовательского судна, приведению в действие двигателя, который перемещает управляющие поверхности в нужное положение, самим управляющим поверхностям и сигналу от датчика внешнего давления, соответственно. Излучатель располагается на нужной глубине, когда разность между предписанной глубиной и глубиной, полученной от датчика внешнего давления, либо равна нулю, либо отвечает некоторому заданному пользователем порогу. Операция дифференцирования осуществляется суммирующим блоком 1160a.
Для случая приведения в действие управляющей поверхности для поддержания надлежащего (т.е. нулевого) угла крена, вход 1110a, выход 1120a, компонент 1140a и датчик 1150a соответствуют команде от исследовательского судна, приведению в действие двигателя, который перемещает управляющие поверхности в нужное положение, самим управляющим поверхностям и сигналу от внутреннего датчика ориентации, соответственно. Излучатель располагается с нужным углом крена, когда разность между предписанным углом крена и выведенным из датчика ориентации либо равна нулю, либо отвечает некоторому заданному пользователем порогу. Операция дифференцирования осуществляется суммирующим блоком 1160a.
В отношении схемы 1100b, архитектура 1110b управления с обратной связью объединяется со встроенным фильтром 1120b адаптивной компенсации для изменения сигнала 1130b возбуждения таким образом, чтобы ускорение 1140b излучающего поршня было оптимальным с точки зрения управления механической добротностью, связанной с основным резонансом преобразователя, и для минимизации изменения от блока к блоку звука, излучаемого преобразователе в пространственно распределенном массиве, чтобы излучаемый сигнал дальнего поля был, по существу, эквивалентен суперпозиции всех элементов массива, действующих синфазно при одинаковой интенсивности источника. При некотором изменении, встроенный фильтр 1120b адаптивной компенсации может обеспечивать средство для коррекции сигнала 1130b возбуждения с учетом любых возможных вредоносных эффектов взаимного импеданса излучения, связанных с соседними элементами массива (т.е., сопряжением источников), а также любых незначительных искажений, связанных с амплитудной и фазовой характеристикой комбинированной системы поршень-якорь.
Архитектура 1110b управления с обратной связью используется для уменьшения вышеупомянутой добротности и содержит передаточную функцию 1111b объекта управления, контроллер 1112b с обратной связью по скорости и суммирующий блок 1113b. Передаточная функция 1111b объекта управления связывает амплитудную и фазовую характеристику ускорения поршня с формой волны, подаваемой на усилитель мощности. Контроллер 1112b с обратной связью по скорости вносит дополнительное гашение электрическим средством в резонансной области, связанной с преобразователем, для оказания влияния на устойчивую характеристику ограниченного диапазона преобразователя. Таким образом, физическое смещение, связанное с агрегатом подвижного якоря, показанным на фиг. 6, не будет превышать длины зазор и влиять на цепь центральной пластины. Гашение также минимизирует нарушение непрерывности, связанное с фазовой характеристикой, при прохождении резонанса. Суммирующий блок 1113b объединяет сигнал от контроллера 1112b с обратной связью и встроенного фильтра 1120b адаптивной компенсации для достижения нужного результата.
Встроенный фильтр 1120b адаптивной компенсации используется для минимизации изменения от блока к блоку звука, излучаемого преобразователе в пространственно распределенном массиве и состоит из компенсационного фильтра 1121b, адаптивного контроллера 1122b, сигнала 1123b управления для нужного ускорения поршня и суммирующего блока 1124b. Компенсационный фильтр 1121b и адаптивный контроллер 1122b образуют каскадный набор фильтров IIR и FIR, предназначенных для минимизации среднеквадратической ошибки, связанной с ускорением 1140b излучающего поршня и сигналом 1123b управления, с использованием суммирующего блока 1124b для вычисления разности между двумя сигналами. Таким образом, можно учитывать умеренные нарушения передаточной функции 1111b объекта управления, чтобы излучаемый массивом сигнал дальнего поля был, по существу, эквивалентен суперпозиции всех элементов массива, действующих синфазно с одной и той же интенсивностью источника.
Следует понимать, что описанный здесь вариант осуществления призван лишь иллюстрировать принципы этого изобретения, и что специалисты в данной области техники могут предлагать различные модификации, не выходя за рамки объема и сущности изобретения.
Реферат
Предусмотрен когерентный источник звука для морской сейсморазведки. Иллюстративный подводный звукоизлучатель содержит множество поршней, приводимых в действие генератором электромагнитной силы, имеющим компоненты, содержащие статор, якоря, электрические катушки и постоянные магниты. Поршни и компоненты предназначены для создания механической и магнитной симметрии относительно геометрического центра излучателя для уменьшения реактивных нагрузок, возникающих, когда поршни приводятся в действие. Статор и якоря имеют магнитные полюсы, которые используют конусообразную геометрию. Излучатель, в необязательном порядке, включает в себя системы управления для повышения точности генератора силы, обеспечения компенсации давления для поршней, точной регулировки статического положения поршней и/или изменения глубины и крена, когда излучатель сконфигурирован как буксируемое тело. Множество таких излучателей может быть сконфигурировано в виде массива. Кабель-трос может соединять излучатели с судном, передавать электрическую мощность и сжатый газ на каждый элемент массива и/или обеспечивать среду передачи данных между излучателем и судном. 2 н. и 17 з.п. ф-лы, 11 ил.
Комментарии