Способ управления сменой ведущего судна в системе сейсморазведки с несколькими судами - RU2682375C2
Код документа: RU2682375C2
Чертежи





















Описание
Область техники, к которой относится изобретение
Изобретение относится в области сбора геофизических данных.
Более точно, изобретение относится к морской сейсморазведке с несколькими судами для получения изображения морского дна земной коры.
В частности, изобретение относится к способу управления взрывами в системе сейсморазведки с несколькими судами, которая включает несколько судов-источников (распределяющее судно-источник и по меньшей мере одно ведомое судно-источник) и по меньшей мере одно регистрирующее судно. Каждое судно-источник содержит по меньшей мере один сейсмоисточник, выполняющий отстрелы в заданные моменты. Каждое регистрирующее судно оснащено системой регистрации и буксирует по меньшей мере одну сейсмическую косу, содержащую сейсмические датчики.
На практике система сейсморазведки с несколькими судами зачастую содержит несколько судов-источников и несколько регистрирующих судов. Более того, некоторые суда могут быть и судном-источником, и регистрирующим судном.
Настоящее изобретение может применяться, в частности, в сфере нефтегазоразведки, но может также применяться в любой другой области, использующей сеть сбора геофизических данных в морских условиях.
Уровень техники
1. Принципы морской сейсморазведки
Для осуществления морской сейсморазведки в зоне съемки принято использовать сейсмические источники (пневмопушки, вибрационные источники и т.д.) и сейсмические датчики. Датчики устанавливают в кабелях, называемых сейсмическими косами (или акустическими линейными антеннами или сейсмическими кабелями). Для формирования массива из нескольких тысяч датчиков используют несколько сейсмических кос. Сейсмические источники буксируются одним или несколькими судами-источниками, а сейсмические косы буксируются одним или несколькими регистрирующими судами. Одно и то же судно может быть как судном-источником, так и регистрирующим судном (т.е. оно может буксировать одну или несколько сейсмических кос и один или несколько сейсмических источников).
Для сбора геофизических данных в морских условиях сейсмические источники (буксируемые по меньшей мере одним судном-источником) активируется для генерации отдельных импульсов или непрерывного излучения энергии. Сигналы, вырабатываемые каждым сейсмическим источником, проходят сквозь слои земной коры, а отраженные сигналы улавливаются датчиками (гидрофонами), находящимися в сейсмических косах (буксируемых по меньшей мере одним регистрирующим судном).
Каждое расчетное положение, в котором должен сработать сейсмический источник, является положением пункта взрыва (также называемого "пунктом взрыва"), определяемой его географическими координатами (широтой/долготой и/или восточным и северным склонением). Когда сейсмический источник достигает такого пункта взрыва, пневмопушка активируется и производит взрыв. Набор пунктов взрыва всех сейсмических источников называют "схемой расположения пунктов взрыва до начала работ" (preplot).
Процесс сбора данных управляется и контролируется навигационной системой (также называемой "комплексной навигационной системой" INS (Integrated Navigation System)), находящейся на борту ведущего судна и предназначенной для вычисления положения датчиков и сейсмических источников, ведения судна по маршруту сбора данных согласно геометрии предварительной схемы расположения пунктов взрыва до начала работ и активации сейсмических источников для осуществления сейсморазведки в требуемых положениях (пунктах взрыва).
Навигационная система определяет момент активации сейсмического источника для каждого пункта взрыва в зависимости от положений различных компонентов системы. Такой момент, также называемый "временем взрыва", часто обозначают как ТО.
Текущие положения всего оборудования (гидрофонов и пневмопушек) определяются с помощью хорошо известных средствам измерения (глобальной навигационной спутниковой системе, относительной глобальной навигационной спутниковой системе, гидроакустическим средствам, компасам, датчикам глубины и т.д.).
2. Совместная работа нескольких судов
Для дальнейшего улучшения качества сейсмических изображений сейсмическая съемка в настоящее время осуществляется в режиме совместной работы нескольких судов, чтобы получать широкоазимутальное освещение земной коры (это объясняет, почему в данном случае схему расположения пунктов взрыва до начала работ называют "широкоазимутальной схемой расположения пунктов взрыва до начала работ" или "WAZ preplot". Система сейсморазведки с несколькими судами часто включает в себя несколько судов-источников и несколько регистрирующих судов. Одно и то же судно может быть судном-источником и регистрирующим судном.
Широкоазимутальная схема расположения пунктов взрыва до начала работ определяет последовательность пунктов взрыва, с которой чередуются взрывы, производимые различными судами.
Порядок производства взрывов и соответственно работы судов также определяется широкоазимутальной схемой расположения пунктов взрыва до начала работ. Порядок производства взрывов судами должен соблюдаться и осуществляться по возможности ближе к географическим координатам пунктов взрыва, указанным в широкоазимутальной схеме расположения пунктов взрыва до начала работ. Для соблюдения порядка производства взрывов работа различных суда должна быть синхронизирована.
3. Определения
Центр мишени (обозначаемый буквами BE): в типичной конфигурации морской гидрографической съемки предусматривается по меньшей мере одно ведомое судно и одно ведущее судно, являющееся опорной точкой для вычисления положения других судов. Таким образом, вычисление положения цели ведомым судном осуществляется исходя из положения ведущего судна. Такая цель называется центром мишени (обозначаемым буквами BE), и положение каждого ведомого судно должно по возможности совпадать с такой целью в соответствующее время. На практике точка нахождения ведущего судна (или любого оборудования, связанного с ведущим судном, например, сейсмического источника) используется в качестве опорной точки для вычисления идеального положения других судов (ведомых судов), т.е. для пространственной синхронизации ведомых судов.
Идеальное положение ведомого судна указывается круглой мишенью ("Bull's Eye"), имеющей:
- центр мишени, который зависит от проекции опорной точки ведущего судна на морской профиль (sale line) ведомого судна. В частном случае, когда считается, что ведомые суда-источники располагаются на одной линии с ведущим судном, "центр мишени" совпадает с проекцией опорной точки ведущего судна на морской профиль ведомого судна. В другом частном случае, когда считается, что суда-источники располагаются не на одной линии, имеется заданное смещение вдоль морского профиля ведомых судов "центра мишени" и проекции опорной точки ведущего судна на морской профиль ведомого судна; и
- радиус допуска, который может задаваться контрактными требованиями (например, 10 м).
Определяемая заранее опорная точка ведомого судна должна располагаться в "центре мишени" для обеспечения надлежащей синхронизации ведомого судна.
Способ проецирования опорной точка ведущего судна может отличаться в зависимости от алгоритма проецирования, как это показано на фиг. 1а и 1б.
На всех описываемых ниже чертежах треугольником обозначено судно, овалом -"центр мишени", а крестиком - опорная точка ведущего судна или пункт взрыва в зависимости от ситуации. Кроме того, точечные символы представляют собой проекции ведущего судна на производственный профиль ведомого судна.
В первом примере (фиг. 1а) опорная точка ведущего судна проецируется на производственные профили ведомых судов со статическим смещением и с ортогональной проекцией, как это видно из фиг. 1а для трех "центров мишени", соответствующих ведомым судам 1, 2 и 3.
Во втором примере (фиг. 1b) проекция опорной точки ведущего судна вычисляется исходя из продвижения ведущего судна по траектории навигации. "Центр мишени" каждого ведомого судна перемещается по своей соответствующей траектории навигации в зависимости от перемещения ведущего судна по своей собственной траектории. Входными параметрами являются: определение траектории ведущего судна, определение траектории ведомого судна и продвижение ведущего судна по его траектории. Как показано на фиг. 1b, продвижение ведущего судна по его траектории навигации составляет 25%, таким образом, расчетная опорная точка для ведомого судна 1 располагается в точке, соответствующей прохождению ведомым судном 25% его траектории.
По сути, можно сказать, что ведущее судно (или любые точки или элементы, относящиеся к ведущему судну) проецируется на траекторию ведомого судна для вычисления его оптимального положения.
Время взрывать ("Time to shot"), также называемое временем взрыва:
"Время взрыва" для ведущего судна (или "Время взрыва Т0") обычно вычисляют исходя из:
- траектории ведущего судна и положений его пунктов взрывов,
- расстояния между пунктом взрыва со схемы расположения пунктов взрыва до начала работ и расчетным пунктом взрыва для ведущего судна (расчетный пункт взрыва для ведущего судна обычно представляет собой точку нахождения пневмопушек (сейсмических источников) или любой другой точки, принадлежащей ведущему судну),
- скорость ведущего судна при следовании по своей траектории.
Обычно времена взрывов для ведомых судов вычисляют исходя из времени взрыва для ведущего судна для обеспечения четкого соблюдения графика. Другими словами, ведомые суда могут вычислять свое собственное время взрыва на основе алгоритма текущего планирования, исходя из:
- линейной интерполяции результатов расчетов, проведенных ведущим судном,
- или расчетного времени взрыва, временных окон для осуществления взрывов, вычисленных на основе расчетных времен взрывов ведущего судна, и физических положений ведомого судна, если они попадают во временные окна для осуществления взрывов,
- или любых ограничений, связанных с проводимыми ведущим судном расчетами, (например, минимальным временным интервалом между двумя взрывами).
4. Недостатки существующих решений
Основным недостатком систем сейсморазведки с несколькими судами, основанных на использовании ведущего судна, является то, что сейсмическая съемка должна быть прекращена, если ведущее судно не в состоянии выполнять свои функции по любой причине, подобной, к примеру, изменению направления движения. В таком случае система должна быть переконфигурирована, чтобы определить новое ведущее судно.
Сущность изобретения
В частном аспекте настоящего изобретения предлагается способ управления сменой ведущего судна в системе сейсморазведки с несколькими судами, включающей в себя ведущее судно M и по меньшей мере одно ведомое судно, движущиеся по их соответствующим траекториям, при этом ведущее судно является опорной точкой для вычисления своего положения упомянутым по меньшей мере одним ведомым судном, и по меньшей мере один сейсмический источник, буксируемый по меньшей мере одним судном, при этом упомянутый способ предусматривает по меньшей мере в части процесса сейсмической съемки с несколькими судами:
- этап (21, 21') выбора нового ведущего судна М' из по меньшей мере одного ведомого судна, инициируемый по меньшей мере одним заданным событием;
- этап (22, 22') передачи упомянутому по меньшей мере одному ведомому судну по меньшей мере одной части информации, относящейся к смене ведущего судна, с ведущего судна М, называемого старым ведущим судном, новому ведущему судну М'.
Таким образом, данный частный вариант осуществления изобретения основан на совершенно новом изобретательском подходе, при котором в процессе сейсмической съемки осуществляется смена ведущего судна со "старого" ведущего судна на "новое" ведущее судно, чтобы избежать нарушений работы, что бы ни случилось со старым ведущим судном, т.е. даже если старое ведущее судно более не способно выполнять свои функции в процессе сейсмической съемки (к примеру, вследствие поворота).
Например, данный частный вариант осуществления изобретения позволяет не прекращать съемку и проведение взрывов всеми судами, что бы ни случилось со "старым" ведущим судном, таким образом, позволяя своевременно осуществлять регулярные взрывы всем судам, участвующим в сейсмической съемке.
Такой подход также позволяет оставаться в рамках природоохранного регулирования, которое требует своевременно осуществлять регулярные взрывы всем судам. В самом деле, данный частный вариант осуществления изобретения гарантирует, что все суда будут осуществлять все взрывы, которые они должны произвести, четко вовремя, даже во время смены между старым и новым ведущими судами.
Более того, данный частный вариант осуществления изобретения гарантирует регулярное покрытие, даже если старое ведущее судно должно быть остановлено.
Согласно данному частному варианту осуществления изобретения, заданное событие инициирует этап смены ведущего судна путем выбора нового ведущего судна из судов системы. После выбора нового ведущего судна все суда системы должны быть оповещены о такой смене, например, посредством передачи части информации, относящейся к такой смене. Такая часть информации может передаваться контролирующим средством, находящимся на старом ведущем судне или любом другом судне, и может содержать несколько уровней информации.
Например, в "распределенном" режиме работы такая часть информации соответствует оповещению о смене ведущего судна, содержащему данные, относящиеся к новому ведущему судну. Например, такая часть информации соответствует переходу между старым и новым ведущими судами, в виде "скачка" для не постепенного перехода и как "линейной функции" для постепенного перехода. Имея такую часть информации все ведомые суда способны вычислить новый "центр мишени" и новое расчетное время взрыва в привязке к новому ведущему судну.
В другом примере в "централизованном" режиме работы такая часть информации соответствует оповещению о смене ведущего судна и так же содержит все данные, необходимые ведомому судну для привязки к новому ведущему судну (новый центр мишени, новое расчетное время взрыва и т.д.).
Согласно одному из частных отличительных признаков, упомянутая одна часть информации относится к постепенной по времени смене ведущего судна со старого ведущего судна M на новое ведущее судно М'.
Таким образом, данный частный вариант осуществления изобретения, в котором переход между старым и новым ведущими судами осуществляется постепенно, позволяет не пропускать некоторое количество взрывов благодаря учету положений старого и нового ведущих судов, таким образом обеспечивая регулярность съемки без перерывов.
Данный частный вариант осуществления изобретения особо эффективен, когда старое и новое ведущие суда располагаются не на одной линии или со значительным уступом.
В одном из частных вариантов осуществления изобретения упомянутая по меньшей мере одна часть информации соответствует положению цели в функции опорной точки нового ведущего судна М' и новому расчетному времени взрыва или серии расчетных времен взрывов в функции расчетного времени взрыва или серии расчетных времен взрывов для нового ведущего судна М'.
Таким образом, данный частный вариант осуществления изобретения (в "централизованном" режиме работы) позволяет всем судам привязываться к новому ведущему судну, т.к. старое ведущему судну более не может выполнять функцию опорной точки. С этой целью на все суда передаются новые значения, привязанные к "центру мишени" и времени взрыва для нового ведущего судна.
Согласно одному из частных отличительных признаков, способ также предусматривает по меньшей мере для одного ведомого судна по меньшей мере этап передачи другим судам упомянутой системы сейсморазведки с несколькими судами своей опорной точки и своего расчетного времени взрыва, а по меньшей мере для одного ведомого судна, получающего упомянутую по меньшей мере одну часть информации:
а) вычисление нового положения цели для ведомого судна по меньшей мере в функции опорной точки нового ведущего судна М';
б) вычисление нового расчетного времени взрыва или серии новых расчетных времен взрывов по меньшей мере в функции расчетного времени взрыва или серии новых расчетных времен взрывов нового ведущего судна М',
при этом опорная точка используется для вычисления идеального положения судна.
Таким образом, данный частный вариант осуществления изобретения (в "распределенном режиме" работы) позволяет всем судам привязываться к новому ведущему судну, т.к. старое ведущее судно более не может играть роль опорной точки. Для этого должны быть заново рассчитаны некоторые новые необходимые для нормальной работы параметры в функции нового ведущего судна вместо привязки к старому ведущему судну.
Такие параметры требуются для того, чтобы ведомые суда могли рассчитать свое собственное положение и время взрыва для создания своего покрытия. В самом деле, каждое ведомое судно должно по возможности соответствовать этой цели в нужное время и нуждается в таких параметрах.
При смене ведущего судна ведомому судну необходимо заново вычислить эти параметры с привязкой к новому ведущему судну.
Более того, в таком "распределенном режиме" работы все суда должны передавать, к примеру, на судно, где установлено контролирующее средство, некоторые данные (опорную точку, расчетное время взрыва, скорость судна и т.д.), необходимые для расчета на судне, на котором установлено контролирующее средство, часть информации, затем передаваемой всем судам. Например, все суда передают такие данные циклически, к примеру, каждую секунду.
В другом варианте осуществления изобретения способ предусматривает для по меньшей мере одного ведомого судна, получающего упомянутую по меньшей мере одну части информации:
в) вычисление новой оптимальной скорости ведомого судна по меньшей мере в функции нового ведущего судна М';
г) вычисление нового времени достижения точки ведомым судном по меньшей мере в функции нового ведущего судна М'.
Согласно одному из частных отличительных признаков, в случае постепенной смены:
- этап а) предусматривает по меньшей мере итерацию подэтапа а') вычисления по меньшей мере одного промежуточного положения цели ведомого судна по меньшей мере в функции опорной точки старого ведущего судна M и опорной точки нового ведущего судна М';
- этап б) предусматривает по меньшей мере итерацию подэтапа б') вычисления меньшей мере одного промежуточного расчетного времени взрыва или по меньшей мере меньшей мере одной промежуточной серии расчетных времен взрывов для ведомого судна по меньшей мере в функции расчетного времени взрыва для старого ведущего судна M и расчетного времени взрыва для нового ведущего судна М' или серии расчетных времен взрывов для старого ведущего судна M или серии расчетных времен взрывов для нового ведущего судна М'.
Таким образом, данный частный вариант осуществления изобретения (в "распределенном режиме" работы) позволяет осуществлять постепенную смену посредством вычисления промежуточных значений некоторых из требуемых параметров (опорной точки, расчетного времени взрыва и т.д.), позволяя осуществлять регулярную непрерывную сейсмическую съемку.
Например, для положения цели ведомого судна вычисляют два промежуточных значения с тем, чтобы новая опорная точка для этого ведомого судна перемещалась постепенно от опорной точки, соответствующей старому ведущему судну к опорной точке, соответствующей новому ведущему судну, таким образом исключая пропуск нескольких взрывов.
В другом варианте осуществления изобретения способ содержит:
- этап в), предусматривающий по меньшей мере итерацию подэтапа в') вычисления по меньшей мере одной промежуточной оптимальной скорости ведомого судна по меньшей мере в функции старого и нового ведущих судов;
- этап г) предусматривающий по меньшей мере итерацию подэтапа г') вычисления по меньшей мере одного промежуточного времени достижения ведомым судном точки в функции старого и нового ведущих судов.
Согласно одному из признаков, способ содержит этап определения виртуального ведущего судна по меньшей мере в виде функции от старого ведущего судна M и нового ведущего судна М', причем во время постепенной смены ведущего судна для по меньшей мере одного ведомого судна системы сейсморазведки с несколькими судами подэтап б') учитывает расчетное время взрыва или серию расчетных времен взрывов для виртуального ведущего судна.
Таким образом, в данном частном варианте осуществления изобретения (в "распределенном режиме" работы или в "централизованном режиме" работы) вычисляется виртуальное ведущее судно исходя из положений как старого, так и нового ведущих судов, при этом виртуальное ведущее судно используется для вычисления постепенной смены. Таким образом, расчетное время виртуального ведущего судна будет использоваться в качестве действующего расчетного времени взрыва для всех судов.
Например, виртуальное ведущее судно вычисляется как средневзвешенное значение старого и нового ведущих судов, спроецированное на морской профиль каждого судна во время перехода или постепенной смены ведущего судна. В частном варианте осуществления изобретения взвешивание зависит от стадии перехода, т.е. взвешивание отличается в начале и в конце постепенной смены.
Таким образом, во время смены все суда согласуют свои окончательные расчетные времена взрывов по виртуальному ведущему судну, действуя таким образом, как если бы виртуальное ведущее судно осуществляло управление временами осуществления всех взрывов. Это относится к старому и новому ведущим судам.
Например, упомянутый этап определения виртуального ведущего судна содержит по меньшей мере:
- этап вычисления опорной точки виртуального ведущего судна по меньшей мере в функции опорной точки старого ведущего судна и опорной точки нового ведущего судна;
- этап вычисления расчетного времени взрыва для виртуального ведущего судна или серии расчетных времен взрывов для виртуального ведущего судна по меньшей мере в функции времени достижения точки старым ведущим судном и времени достижения точки новым ведущим судном.
Таким образом, данный конкретный вариант осуществления изобретения (в "распределенном режиме" работы или в "централизованном режиме" работы) позволяет всем судам привязываться к виртуальному ведущему судну, т.к. требуемые параметры вычисляются в привязке к виртуальному ведущему судну, и гарантирует, что все суда будут по возможности соответствовать данной цели в нужное время.
В другом варианте осуществления изобретения способ предусматривает:
- этап вычисления положения виртуального ведущего судна по меньшей мере в функции положения старого ведущего судна и положения нового ведущего судна;
- этап вычисления оптимальной скорости виртуального ведущего судна по меньшей мере в функции оптимальной скорости старого ведущего судна и оптимальной скорости нового ведущего судна.
Согласно одному из признаков, упомянутый этап определения виртуального ведущего судна учитывает два или более регистрирующих судна системы.
В данном варианте осуществления изобретения виртуальное ведущее судно вычисляется с привлечением всех судов системы, таким образом позволяя распределять ошибку покрытия, связанную с охватом.
Например, каждое судно системы осуществляет упомянутый этап определения виртуального ведущего судна.
В данном варианте осуществления изобретения виртуальное ведущее судно может вычисляться параллельно на каждом судне с помощью распределенного алгоритма, так что все суда, включая старое ведущее судно, новое ведущее судно и другие ведомые суда могут вычислять себе виртуальное ведущее судно, чтобы иметь свою собственную опорную точку.
Согласно одному из признаков, количество итераций подэтапов а') и/или б') зависит по меньшей мере от одного из критериев, относящихся к группе, включающей в себя:
- заданное расстояние для осуществления постепенной смены;
- скорость по меньшей мере одного из судов системы;
- минимальный временной интервал между взрывами для по меньшей мере одного из судов системы;
- реальный временной интервал между взрывами для по меньшей мере одного из судов системы.
В данном варианте осуществления изобретения длительность постепенной смены ведущего судна может быть статичной, фиксированной или изменяемой величиной или любой динамической величиной, зависящей от статуса старого и нового судов, к примеру, от расстояния на осуществление перехода, скоростей судов, минимального временного интервала между взрывами, который должны обеспечивать эти суда и реального временного интервала между взрывами.
Согласно одному из признаков, упомянутое заданное событие соответствует поданной одним из судов системы команде, относящейся к группе, включающей в себя:
- команду, поданную пользователем вручную;
- автоматическую команду, зависящую от положения старого ведущего судна относительно точки маршрута;
- автоматическую команду, зависящую от запланированного начала смены ведущего судна;
- автоматическую команду, инициированную выявлением отклонением контролируемого параметра старого ведущего судна.
В данном варианте осуществления изобретения смена ведущего судна может инициироваться любым заданным событием, которое может относиться к действиям пользователя или автоматическим или планируемым событиям.
В первом случае событие может инициироваться пользователем, например, с помощью интерфейса человека с компьютерной программой контролирующего средства, находящегося на ведущем судне или любом другом судне, задействованном в операции.
В другом случае событие может планироваться и автоматически вырабатываться в зависимости от нескольких возможных параметров, таких как:
- положение старого ведущего судна относительно точки маршрута (любой точки на морском профиле): когда старое ведущее судно достигает этой точки, событие генерируется автоматически для инициирования смены ведущего судна;
- плановое время начала смены ведущего судна;
- результат автоматической проверки любых неисправностей старого ведущего судна, как то: любой срыв определения местоположения оборудования, любая неисправность, влияющая на процесс сейсморазведки. Например, если старое ведущее судно пойдет не по заданной траектории и имеет курс, отличающийся от азимута траектории навигации, или если расстояние поперек профиля слишком велико и т.д.
Согласно одному из признаков, упомянутый этап выбора нового ведущего судна М' из по меньшей мере двух ведомых судов предполагает по меньшей мере одну итерацию следующих подэтапов:
- выбора судна с наивысшим приоритетом из перечня заданных приоритетов судов;
- проверки для упомянутого выбранного судна по меньшей мере одного из заданных параметров;
- подтверждения того, что по меньшей мере одно из судов осуществляет взрыв:
- в случае отрицательного подтверждения выбранное судно становится новым ведущим судном М';
- в случае положительного подтверждения и если выбранное судно не поворачивает, то выбранное судно становится новым ведущим судном М';
- в случае положительного результата подтверждения и если выбранное судно поворачивает, то выбор следующего по приоритету судна из перечня заданных приоритетов судов.
Например, заданные параметры относятся к группе, включающей в себя:
- качество радиолинии,
- качество определения местоположения дифференциальной глобальной навигационной системой,
- надежность определения положения сейсмического источника,
- состояние развертывания сейсмического источника,
- любой другой отказ определения положения или навигационная ошибка в системе.
Согласно одному из признаков, способ предусматривает этап получения отображения мгновенного состояния заданных признаков старого ведущего судна, и в нем упомянутые подэтапы а') и б') учитывают интерполяцию упомянутого отображения мгновенного состояния.
В данном варианте осуществления изобретения виртуальное ведущее судно может быть вычислено с помощью отображения мгновенного состояния (включающего в себя положения, скорости и время достижения точек) старого ведущего судна в начале постепенной смены. В таком случае постепенная смена вычисляется не с обновляемым старым ведущим судном, а с интерполированным старым ведущим судном. Такой подход позволяет старому ведущему судну быстро выйти из операции или избежать влияния любых отказов радиосвязи, не оказывая воздействия на другие суда, остающиеся в работе.
Данный вариант осуществления изобретения обеспечивает независимость происходящей смены от эволюции старого ведущего судна после начала процесса смены.
В другом варианте осуществления изобретения настоящее описание относится к энергонезависимому машиночитаемому носителю информации, хранящему программу, которая при ее выполнении компьютером или процессором понуждает компьютер или процессор осуществлять вышеописанный способ (в любом из его отличающихся вариантов осуществления).
В другом варианте осуществления изобретения настоящее описание относится к системе сейсморазведки с несколькими судами, включающей в себя ведущее судно M и по меньшей мере два ведомых судна, имеющих следующие средства, предназначенные и адаптированные для управления сменой ведущего судна, которые интегрированы в упомянутое по меньшей мере одно ведомое судне системы и активируются во время по меньшей мере части операции в составе нескольких судов:
- средство, предназначенное и адаптированное для выбора нового ведущего судна М' из по меньшей мере двух ведомых судов, инициируемое по меньшей мере одним заданным событием;
- средство, предназначенное и адаптированное для передачи по меньшей мере одной части информации, указывающей, что происходит смена ведущего судна и будет новое ведущее судно М'.
Предпочтительно, система сейсморазведки с несколькими судами содержит средства для осуществления этапов вышеупомянутого способа в любом из различных вариантов его осуществления.
Краткое описание чертежей
Другие признаки и преимущества изобретения очевидны из нижеследующего описания вариантов его осуществления, приведенных в качестве индикативных и не носящих ограничительного характера примеров, и из прилагаемых к описанию чертежей, на которых показано:
на фиг. 1а и 1b - два способа проецирования положения опорной точки ведущего судна, уже рассмотренные в отношении предыдущего уровня техники;
на фиг. 2а и 2b - блок-схемы алгоритма способа управления сменой ведущего судна в двух частных вариантах осуществления изобретения, соответственно для не постепенной и постепенной смены;
на фиг. 3а-3с - первый пример способа управления сменой ведущего судна;
на фиг. 4а-4е - второй пример способа управления сменой ведущего судна;
на фиг. 5а и 5b - третий пример первого частного варианта осуществления способа управления сменой ведущего судна для не постепенной смены с пропущенными взрывами;
на фиг. 6 - блок-схема примера алгоритма вычисления виртуального ведущего судна во втором частном варианте осуществления изобретения для постепенной смены;
на фиг. 7a-7d - первый пример второго частного варианта осуществления способа управления сменой ведущего судна для вычисления опорных точек;
на фиг. 8а и 8d - первый пример второго частного варианта осуществления способа управления сменой ведущего судна для вычисления расчетных времен;
на фиг. 9 - второй пример второго частного варианта осуществления способа управления сменой ведущего судна с предотвращением наложения взрывов;
на фиг. 10 - третий пример второго частного варианта осуществления способа управления сменой ведущего судна, позволяющий распределять ошибку, связанную с охватом;
на фиг. 11 - блок-схема примера алгоритма осуществления выбора ведущего судна;
на фиг. 12 - временной график, иллюстрирующий представление длительности перехода, посылаемый контролирующим средством всем судам системы.
Осуществление изобретения
Изобретение относится к способу управления сменой ведущего судна в системе сейсморазведки с несколькими судами, включающей в себя ведущее судно M и по меньшей мере одно ведомое судно, во время по меньшей мере части операции, осуществляемой в составе нескольких судов.
На фиг. 2а представлен первый частный осуществления алгоритма управления сменой ведущего судна со старого ведущего судна M на новое ведущее судно М' в случае скачкообразной смены. Такой алгоритм реализуется по меньшей мере одним судном системы в двух режимах работы: централизованном режиме, в котором только одно судно реализует алгоритм и передает результаты другим судам, или в распределенном режиме, в котором каждое судно системы реализует упомянутый алгоритм.
На этапе 21 выбора, инициируемом событием "EVENT", из других судов системы выбирают новое ведущее судно М'.
В общем случае событие представляет собой проблему, возникающую на текущем ведущем судне М, которая потенциально может привести к срыву процесса съемки.
Например, ведущее судно M может быть сбито с траектории или остановлено на своей производственной траектории (например, из-за неожиданного препятствия). В таких случаях ведущее судно M более не способно выступать в роли опорного для других судов системы. Таким образом, смена ведущего судна необходима и возможна в данном варианте осуществления изобретения.
Другой пример соответствует известной конфигурации при работе в составе нескольких судов, когда суда располагаются уступами с довольно длинными линейными смещениями. При такой конфигурации, когда ведущее судно М, идущее впереди других судов, поворачивает согласно графику, оно больше не находится в зоне съемки, таким образом, внося возмущение в положение опорной точки для других судов из-за своего поворота. Действительно, его положение уже не находится на одной линии с другими судами, которые еще держат линию и осуществляют съемку. Такой случай показан на фиг. 4а-4с, более подробно описанных ниже. Таким образом, чтобы позволить ведущему судну M поворачивать в возможно короткие сроки, чтобы не терять время и не расходовать слишком много топлива, в данном варианте осуществления изобретения необходима и может осуществляться смена ведущего судна.
Событие, инициирующее смену ведущего судна, может генерироваться вручную или автоматически. Более того, событие может генерироваться контролирующим средством, находящемся на борту ведущего судна M или любого другого судна, участвующего в операции.
Например, событие вводится пользователем с помощью интерфейса человек-машина контролирующего средства при аварии на борту судна.
В другом примере событие запланировано в программном обеспечении контролирующего средства заранее и автоматически генерируется в зависимости от некоторых параметров, подобных положению текущего (старого) ведущего судна M относительно частной точки, называемой точкой маршрута, или запланированному времени начала.
Событие может также автоматически генерироваться программным обеспечением посредством проверки сбоев в работе текущего (старого) ведущего судна М, подобных любой ошибке позиционирования оборудования, любому сбою, влияющему на процесс съемки или в результате того, что текущее (старое) ведущее судно решило отклониться от своей траектории и имеет, к примеру, курс, отличающийся от азимута навигационной траектории, или в результате слишком большого расстояния перпендикулярно профилю.
Независимо от источника события, оно инициирует смену ведущего судна, т.к. текущее (старое) ведущее судно более не способно играть роль опорного судна для других судов системы.
Вследствие этого на роль нового опорного судна для других ведомых судов выбирается новое ведущее судно М'.
Выбор нового ведущего судна М' может осуществляться:
- произвольно пользователем, который вручную выбирает новое ведущее судно М' из перечня судов,
- согласно перечню заданных приоритетов судов.
Такой выбор нового ведущего судна проиллюстрирован, к примеру, на фиг. 11, более подробно описанном ниже.
Затем на этапе 22 передачи часть информации, относящаяся к смене ведущего судна со старого ведущего судна M на новое ведомое судно М', передают по меньшей мере одному из судов системы. Например, если этап выбора выполняется с контролирующего средства, находящегося на старом ведущем судне М, то старое ведущее судно M передает всем судам системы часть информации, относящуюся к смене ведущего судна.
Другими словами, все суда системы будут оповещены о смене ведущего судна и им необходимо сменить свою привязку к ведущему судну, чтобы теперь привязываться к новому ведущему судну М'.
Для этого необходимо заново рассчитать различные параметры в функции нового ведущего судна М' вместо привязки к старому ведущему судну М. Такие параметры необходимы для того, чтобы ведомые суда могли рассчитать свое собственное положение и время взрыва для создания своего покрытия. Действительно, каждое ведомое судно должно по возможности соответствовать этой цели в нужное время и нуждается в таких параметрах.
В распределенном режиме работы упомянутая часть информации, принятая всеми судами, позволяет им рассчитать параметры, необходимые для привязки к новому ведущему судну. В данном режиме работы упомянутая часть информации соответствует данным, представляющим переход (например, в виде линейного изменения или скачка) между старым и новым ведущими судами, и позволяет всем судам рассчитывать необходимые параметры (новый центр мишени и новое расчетное время взрыва).
В централизованном режиме работы упомянутая часть информации, получаемая всеми судами, соответствует результатам вычисления этих параметров, т.е. новому центру мишени и новому расчетному времени взрыва.
По мере смены ведущего судна ведомые суда:
- заново вычисляют эти параметры с привязкой к новому ведущему судну в распределенном режиме работы,
- непосредственно получают новые значения этих параметров, привязанные к новому ведущему судну, в централизованном режиме работы.
Фактически, эти параметры позволяют ведомым судам привязываться к ведущему судну, чтобы придерживаться запланированных взрывов по времени и месту. Центр мишени представляет собой пространственную привязку, а расчетное время взрыва представляет собой временную привязку. Таким образом, данные параметры рассчитываются в привязке к новому ведущему судну (в функции нового ведущего судна), а не к старому.
Для обеспечения оптимального качества съемки полезными оказываются некоторые другие параметры, даже если ведущее судно более не способно выполнять свою работу в ходе съемки.
Например, могут быть заново рассчитаны оптимальные скорости для выравнивания ведомых судов по одной линии и/или согласования времени достижения конечной точки профиля теперь в привязке к новому ведущему судну М'.
Фактически, время достижения точки вместе со скоростью и расстоянием до точки используются для вычисления расчетного времени взрыва.
Таким образом, на этапе 23 осуществления смены ведущего судна ведомые суда:
- вычисляют новые параметры (центр мишени и расчетное время взрыва) в привязке к новому ведущему судну в распределенном режиме работы,
- учитывают новые значения параметров (центра мишени и расчетного времени взрыва), полученных в централизованном режиме работы.
Далее на этапе 24 новым ведущим судном становится судно М'.
Что бы ни случилось со старым ведущим судном, операция с несколькими судами может продолжаться без прерывания или нарушения непрерывности, при этом ведомые суда привязываются теперь к новому ведомому судну М'.
В таком варианте осуществления изобретения можно гарантировать регулярное осуществление взрывов всеми судами посредством обеспечения соблюдения каждым судном минимального и максимального шага между взрывами.
Далее со ссылкой на фиг. 2b рассматривается второй вариант осуществления изобретения, в котором смена ведущего судна со старого на новое осуществляется постепенно, так что смена привязки для ведомых судов происходит не непосредственно со старого на новое ведущее судно.
В данном варианте осуществления изобретения к алгоритму, показанному на фиг. 2а (скачкообразный режим смены), добавляются описываемые ниже дополнительные этапы.
Во-первых, этап 21' выбора ведущего судна М' соответствует этапу 21 с фиг. 2а и здесь повторно подробно не рассматривается.
Далее, этап 21'' позволяет вычислять длительность постепенного перехода между старым и новым ведущими судами. Упомянутая длительность перехода вычисляется исходя из:
- скоростей ведущих судов M и М',
- расстояния вдоль профиля судов,
- запланированных и реальных пунктов взрывов,
- минимального и максимального шагов между взрывами, которые должны учитываться.
Затем на этапе 22', соответствующем этапу 22 с фиг. 2а, посылают сообщение "переключиться с M на М''', за исключением того, что в этом частном варианте осуществления изобретения сообщение описывает постепенность перехода, длительность перехода и начальное время и конечное время переключения, как это показано на фиг. 12 (описываемом ниже по тексту). Постепенное переключение может описываться линейным законом, как это показано на фиг. 12, либо более сложной кривой.
На следующем этапе 23' описываемого процесса осуществляют переключение ведущего судна с M на М', что соответствует этапу 23 с фиг. 2а за исключением того, что в данном варианте осуществления изобретения переключение происходит постепенно, как это показано на фиг. 6 (описываемом ниже по тексту).
Затем на этапе 24' (соответствующем этапу 24 с фиг. 2а) новым ведущим судном становится судно М'.
Со ссылкой на фиг. 11, на котором более подробно поясняется этап 21 (соответственно 21') "Выбора ведущего судна М''' с фиг. 2а (соответственно 2b), представлен частный вариант алгоритма осуществления автоматической смены ведущего судна из перечня заданных приоритетов судов, составленного пользователем.
Обычно судами более высокого приоритета являются наименее маневренные суда (суда, оснащенные сейсмическими косами).
Первым этапом после приема события, инициирующего смену ведущего судна, является выбор из перечня судна с более высоким приоритетом. Следующим этапом является проверка отсутствия неисправностей на этом первом выбранном судне. Обычно проверяемыми позициями являются:
- качество радиолинии с таким судном,
- качество определения положения судна с помощью дифференциальной глобальной навигационной системы,
- надежность определения положения сейсмических источников,
- статус развертывания сейсмического источника,
- или любая другая ошибка позиционирования или навигационная ошибка системы.
Следующий этап заключается в проверке, осуществляют ли суда взрывы, и находится ли еще парк судов в работе.
Если нет, то выбранное судно назначается новым ведущим судном.
Также на следующем этапе проверяют, не поворачивает ли выбранное судно.
Если выбранное судно поворачивает, это значит, что оно не находится на одной линии с другими судами, которые еще держат строй. Таким образом, первое выбранное судно не может стать новым ведущим судном, и система выбирает следующее судно из перечня заданных приоритетов судов и осуществляет такую же проверку.
Если выбранное судно не поворачивает, то оно считается новым ведущим судном.
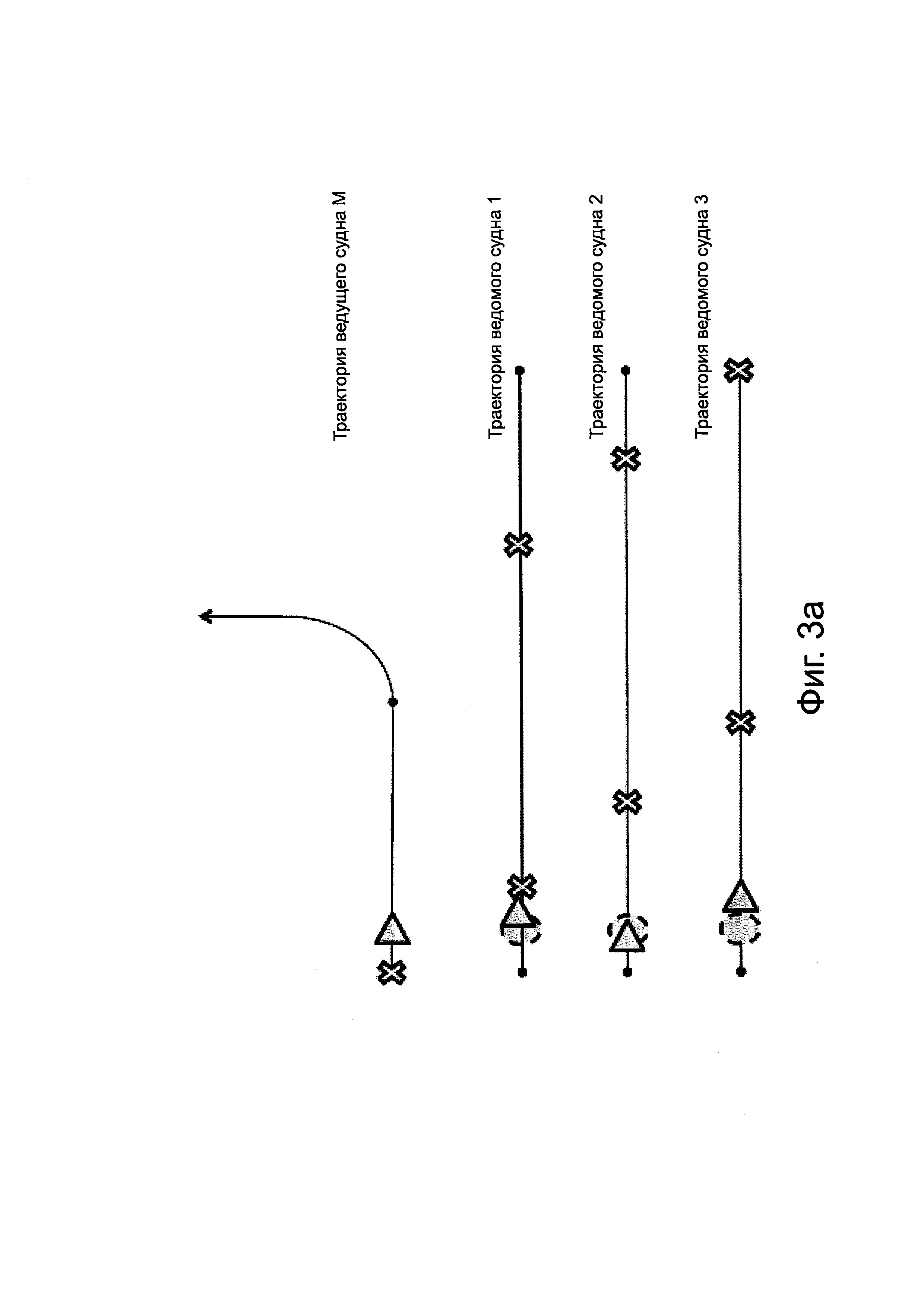
Со ссылкой на фиг. 3а-3с представлен первый пример способа управления сменой ведущего судна со старого ведущего судна M на новое ведущее судно М', будь то скачкообразный или постепенный режим. Фиг. 3а-3с иллюстрируют три различных момента съемки.
В приведенном первом примере система включает в себя четыре судна, в том числе ведущее судно M и три ведомых судна (1, 2, 3). Как уже было сказано выше, суда обозначены треугольниками. Крестиком на траектории ведущего судна M обозначена опорная точка ведущего судна М. Крестиками на траекториях ведомых судов обозначены пункты взрывов, а овалами - центры мишеней для каждого ведомого судна.
На фиг. 3а представлено исходное состояние, когда все ведомые суда располагаются на одной линии с ведущим судном М. Как видно из фиг. 3а, запланированная траектория ведущего судна M отличается траекторий ведомых судов тем, что для ведущего судна M запланирован поворот. В таком случае согласно известным решениям, если ведущее судно начинает поворот, операция прекращается для всех судов.
В данном варианте осуществления изобретения смена ведущего судна происходит со старого ведущего судна M на новое ведущее судно М', выбранное из ведомых судов 1, 2, 3 (например, согласно описанному ранее алгоритму, показанному на фиг. 11), как раз перед поворотом ведущего судна М.
Как показано на фиг. 3b, в качестве нового ведущего судна М' выбрано ведомое судно 3. Таким образом, ведомые суда 1 и 2 должны теперь привязываться к новому ведущему судну M', а не к старому ведущему судну М.
С этой целью, как пояснялось выше, положения целей для ведомого судна 1 и ведомого судна 2 рассчитываются заново с привязкой к опорной точке нового ведущего судна М'. То же самое относится к расчетным временам взрывов для ведомого судна 1 и ведомого судна 2, которые рассчитываются с привязкой к расчетным временам взрывов для нового ведущего судна М'.
Таким образом, как показано на фиг. 3с, на котором старое ведущее судно покидает зону съемки, все другие суда могут все еще продолжать свою работу теперь в функции нового ведущего судна М' (старого ведомого судна 3).
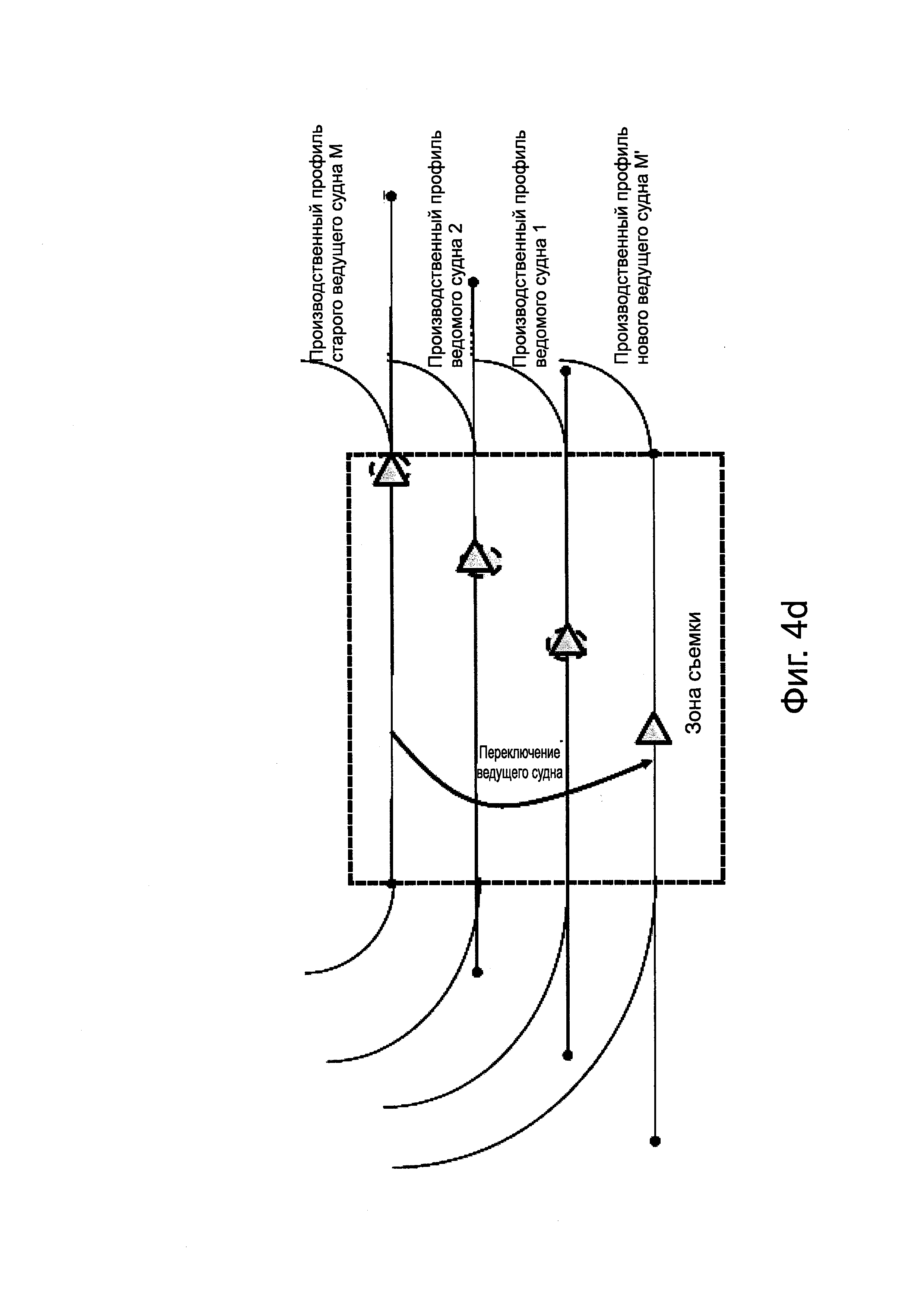
Далее со ссылкой на фиг. 4а-4е представлен второй пример способа управления сменой ведущего судна со старого ведущего судна M на новое ведущее судно М', будь то скачкообразный или постепенный режим смены. Фиг. 4а-4е иллюстрируют пять различных моментов съемки.
В данном втором примере система включает в себя четыре судна, в том числе ведущее судно M и три ведомых судна (1, 2, 3), при этом все суда расположены уступами.
На фиг. 4а представлено исходное состояние, в котором все ведомые суда выровнены по ведущему судну M, а зона съемки обозначена пунктирной линией.
Как видно из фиг. 4b, съемка уже началась для ведущего судна M и ведомых судов 1 и 2. Ведомое судно 3 все еще находится вне зоны съемки.
Как показано на фиг. 4с, съемка началась для всех судов. Из фиг. 4с видно, что ведущее судно собирается покинуть зону съемки и будет далее не в состоянии являться опорной точкой для других судов.
Таким образом, генерируется событие для инициирования смены ведущего судна, как это показано на фиг. 4d, из которого видно, что в качестве нового ведущего судна М' выбрано ведомое судно 3. Таким образом, ведомые суда 1 и 2 должны теперь привязываться к новому ведущему судну M', а не к старому ведущему судну М.
С этой целью, как уже пояснялось выше, положения целей для ведомого судна 1 и ведомого судна 2 рассчитываются заново в функции опорной точки нового ведущего судна М'. То же самое относится к расчетным временам взрывов для ведомого судна 1 и ведомого судна 2, которые вычисляются в функции расчетных времен взрывов для нового ведущего судна М'.
Таким образом, как показано на фиг. 4е, где старое ведущее судно покидает зону съемки, все другие суда могут все еще продолжать свою работу теперь с привязкой к новому ведущему судну М' (бывшему ведомому судну 3).
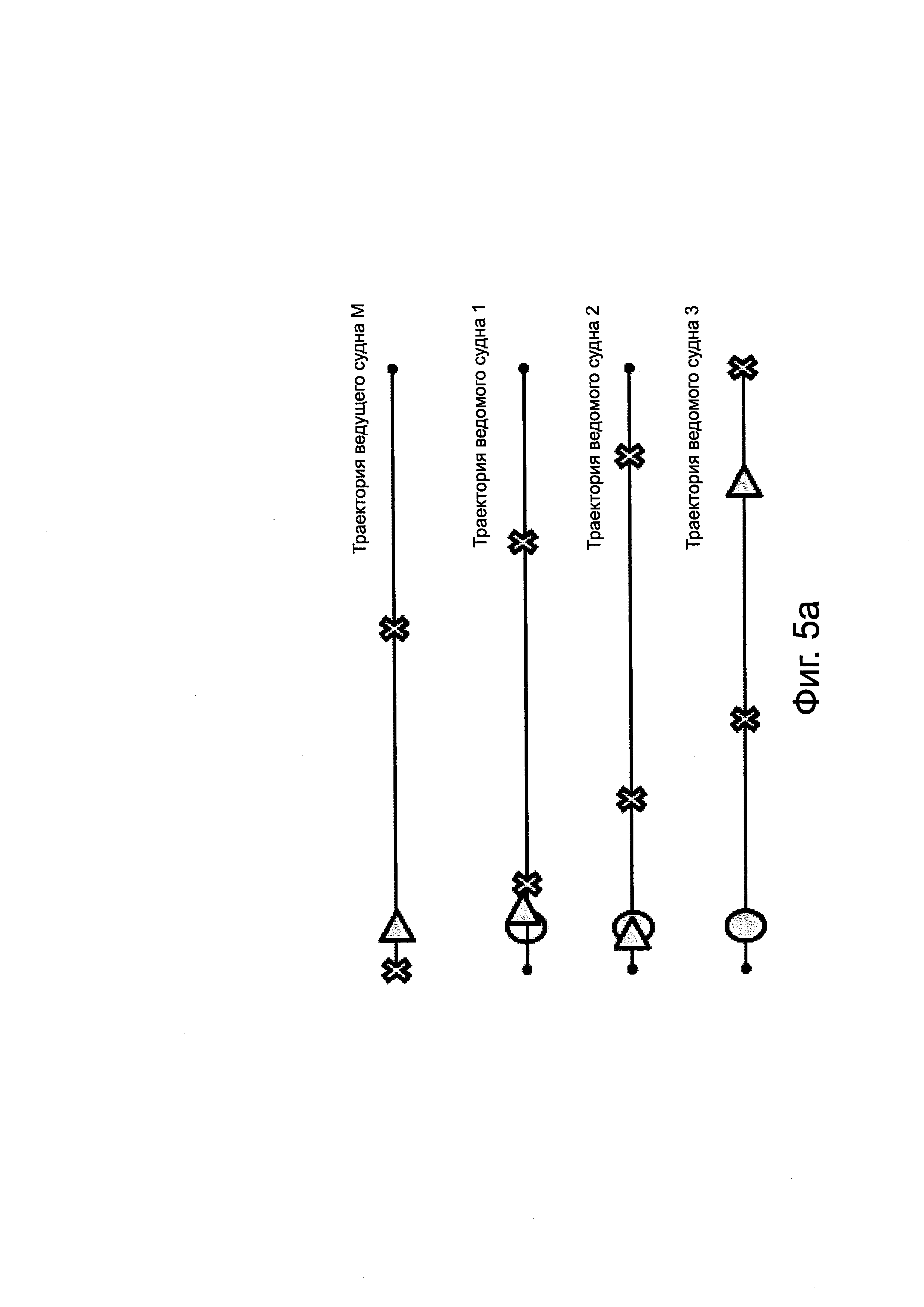
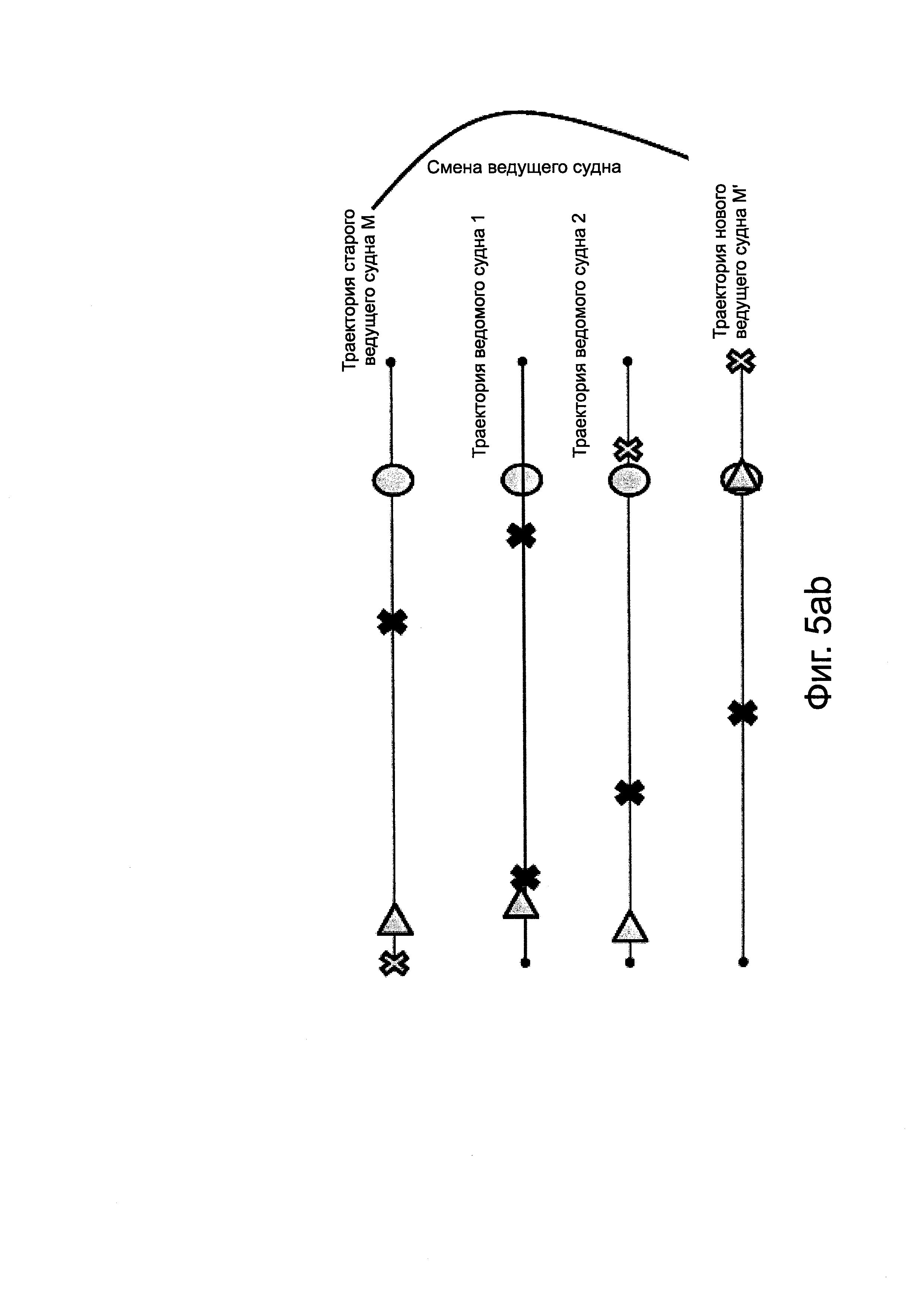
Со ссылкой на фиг. 5а и 5b представлен третий пример способа управления сменой ведущего судна, в котором некоторые взрывы пропущены из-за смены ведущего судна в случае скачкообразной смены.
На фиг. 5а и 5b крестиками обозначены пункты взрывов, т.е. теоретические точки, в которых суда должны производить взрывы.
На фиг. 5а представлено исходное состояние, при котором все ведомые суда, за исключением ведомого судна 3, располагаются в одну линию с ведущим судном М. Ведомое судно 3 находится впереди своего расчетного "центра мишени".
В случае выбора ведомого судна Зв качестве нового ведущего судна, как это показано на фиг. 5b, можно видеть, что некоторые взрывы (для всех судов) пропущены (показаны черными крестиками) из-за новой опорной точки и заново вычисленного "центра мишени" для старого ведущего судна, ведомого судна 1 и ведомого судна 2. Как видно из фиг. 5 а, будут производиться только следующие пункты взрыва для ведущего судна 2 и нового ведущего судна.
Такие пропуски взрывов, иллюстрирующие в данном случае ситуацию, когда ведущее судно располагается впереди других судов, могут исключаться с помощью второго частного варианта осуществления способа управления сменой ведущего судна, обеспечивающего постепенную по времени смену ведущего судна, показанную на ранее описанном фиг. 2b.
Например, согласно этому второму варианту осуществления изобретения (постепенной смены), параметры, требующиеся ведомому судну для привязки к ведущему судну, вычисляются в функции старого ведущего судна и нового ведущего судна для обеспечения постепенного перехода с опорной точки старого ведущего судна к опорной точке нового ведущего судна.
Например, для ведомого судна вычисляют два или более значения положения цели (равно как и значения расчетных времен взрывов), при этом в каждом вычислении процентная доля опорной точки старого ведущего судна уменьшается, в то время как процентная доля опорной точки нового ведущего судна увеличивается, как это показано на описываемом ниже фиг. 12.
Такие следующие одно за другим значения, также называемые промежуточными, могут вычисляться в течение всего перехода от старого ведущего судна к новому ведущему судну. В данном случае промежуточные значения могут считаться значениями, соответствующими "виртуальному" ведущему судну, являющемуся опорным для ведущих судов в процессе постепенной смены со старого ведущего судна на новое ведущее судно М'. Данное понятие "виртуального ведущего судна" более подробно поясняется ниже по ходу описания.
Такое виртуальное ведущее судно (параметры, такие как положения и расчетные данные) может вычисляться, например, по старому ведущему судну, пока оно не передаст свою роль новому ведущему судну, или по новому ведущему судну, после того, как оно получит "эстафету" от старого ведущего судна, чтобы начать постепенную смену.
В другом примере такое виртуальное ведущее судно (параметры, такие как положения и расчетные данные) может вычисляться параллельно на каждом судне системы с помощью распределенного алгоритма, так что все суда (старое ведущее судно, новое ведущее судно и другие ведомые суда) сами вычисляют себе виртуальное ведущее судно. Такое решение позволяет снять любые вопросы с обеспечением радиосвязью.
Например, контролирующее средство, находящееся на одном из судов системы, вырабатывает событие для смены ведущего судна и периодически передает всем судам системы описание перехода по времени между старым ведущим судном и новым ведущим судном, как это показано на фиг. 12. Постепенный переход может быть представлен изменением по линейному закону, как это показано на фиг. 12, где процентная доля опорной точки старого ведущего судна в каждом вычислении уменьшается, в то время как процентная доля опорной точки нового ведущего судна увеличивается, или более сложной нелинейной кривой.
Таким образом, в любой момент времени постепенного перехода любое ведомое судно может иметь представление о статусе постепенной смены, чтобы вычислить свои собственные параметры в привязке к виртуальному ведущему судну независимо от качества радиосвязи между судами.
Эти отличающиеся варианты осуществления изобретения более подробно описаны ниже.
В приведенных примерах такое виртуальное судно может вычисляться с регулярным обновлением старого ведущего судна в процессе всей постепенной смены (случай, когда старое ведущее судно не покидает район съемки в течение постепенной смены) или оно может вычисляться на основе мгновенного состояния старого ведущего судна (включающего в себя положения, скорости и времена достижения точек) в начале постепенной смены. В таком случае постепенная смена вычисляется не с обновляемым старым ведущим судном, а с интерполируемым старым ведущим судном. Это позволяет старому ведущему судну быстро прекращать участие в операции или исключать какое-либо влияние отказов радиосвязи на работу других судов, продолжающих операцию.
На фиг. 6 представлена блок-схема примера алгоритма вычисления виртуального ведущего судна во втором частном варианте осуществления изобретения с постепенной сменой ведущего судна.
В начале постепенной смены (с ведущего судна M на ведущее судно М') выполняется этап 61 запуска счетчика длительности перехода (Т=0). В это время (Т=0) выполняется первый этап 62 вычисления виртуального ведущего судна V.
Например, вычисляется параметр данного виртуального ведущего судна, называемый VParam» в функции соответствующего параметра ведущего судна М, называемого MParam, и параметра ведущего судна М', называемого М'Param:
VParam=((1-(T/Длителъностъ перехода) *(MParam))+(Т/Длительность перехода) *(М'Param))
Такой параметр может быть опорной точкой, расчетной точкой взрыва и т.д.
На этапе 63 показания счетчика текущего времени Τ перехода сравнивают с длительностью перехода, и если Τ меньше, чем длительность перехода, то на этапе 64 показания счетчика текущего времени Τ увеличивают на продолжительность цикла (loop-time) (Τ=Τ + Продолжительность цикла). Вычисляют новый параметр этого виртуального ведущего судна (с новой итерацией на этапе 62).
В отличие от этого, если время Τ равно длительности перехода, то виртуальное ведомое судно становится новым ведущим судном М', и постепенный переход закончен.
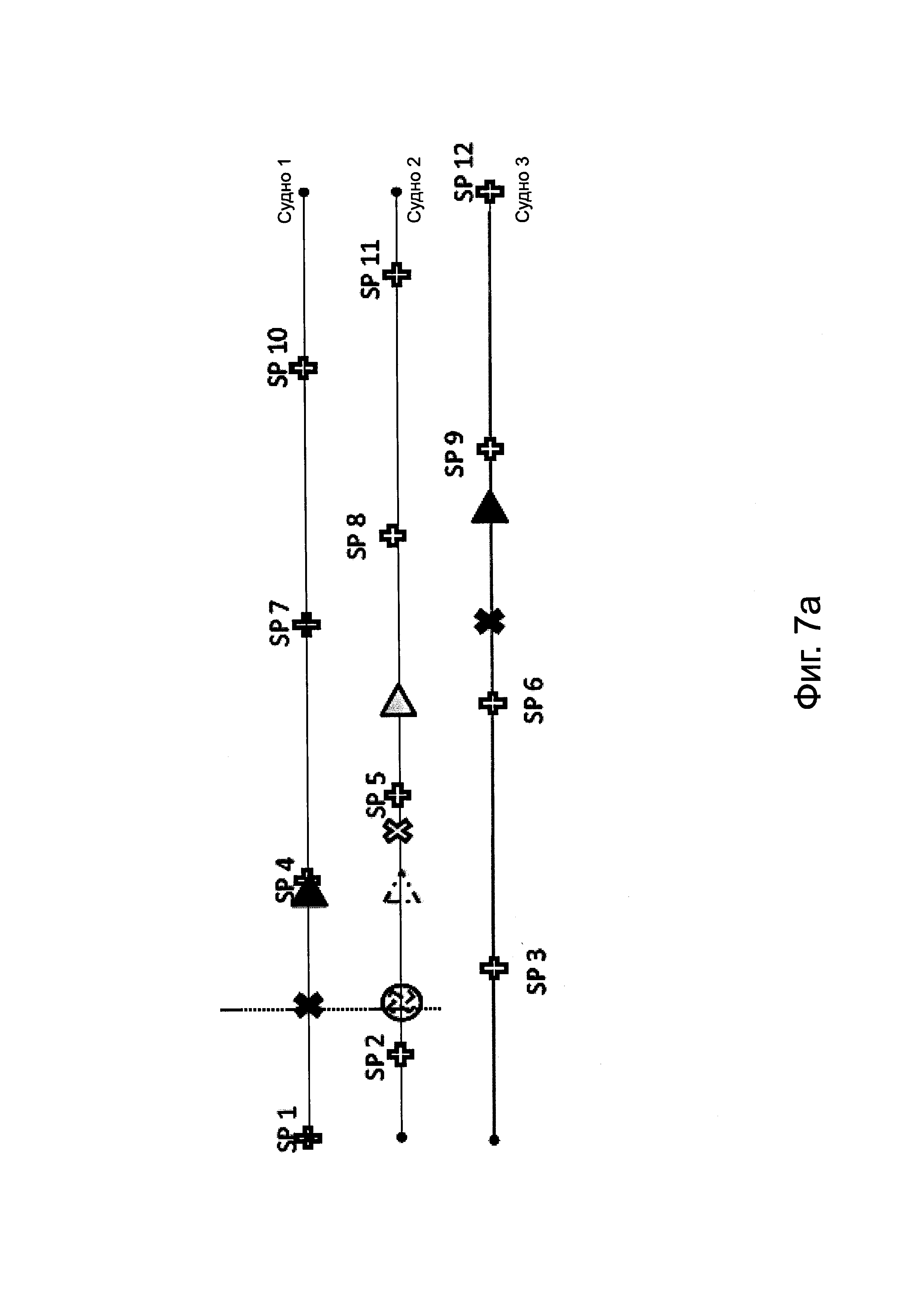
На фиг. 7a-7d представлен пример второго частного варианта осуществления способа управления сменой ведущего судна (при постепенной смене) для вычисления опорных точек.
В данном первом примере система включает в себя три судна: старое ведущее судно M (судно 1), ведомое судно (судно 2) и новое ведущее судно (судно 3). Как сказано выше, треугольниками обозначены суда. Пунктирные символы означают проекции виртуального ведущего судна (на производственный профиль ведомого судна), черными символами обозначены старое и новое ведущие суда. Пункты взрывов обозначены знаками "+", снабженными номерами "SP i" пункта взрыва. Крестиками "х" обозначены опорные точки ведущих судов.
На фиг. 7а представлено исходное состояние во время Т=0, когда виртуальное ведущее судно вычисляют в функции старого ведущего судна. В самом деле, как можно видеть, виртуальное ведущее судно представлено пунктиром на производственном профиле ведомого судна в виде ортогональной проекции старого ведущего судна. "Центр мишени" для ведомого судна соответствует ортогональной проекции (обозначенной вертикальной точечной линией) опорной точки старого ведущего судна.
На фиг. 7b представлено состояние в момент времени Τ = Длительность перехода/3, когда виртуальное ведущее судно вычисляют в функции старого ведущего судна и нового ведущего судна. "Центр мишени" для ведомого судна соответствует проекции средневзвешенного положения опорной точки старого ведущего судна и опорной точки нового ведущего судна.
На фиг. 7с представлено состояние в момент времени Τ = Длительность перехода*2/3, когда виртуальное ведущее судно вычисляют в функции старого ведущего судна и нового ведущего судна. "Центр мишени" для ведомого судна соответствует проекции средневзвешенного положения опорной точки старого ведущего судна и опорной точки нового ведущего судна.
На фиг. 7d представлено окончательное состояние в момент времени Τ = Длительность перехода, когда виртуальное ведущее судно вычисляют только в функции нового ведущего судна. "Центр мишени" для ведомого судна соответствует проекции (обозначена вертикальной точечной линией) опорной точки нового ведущего судна.
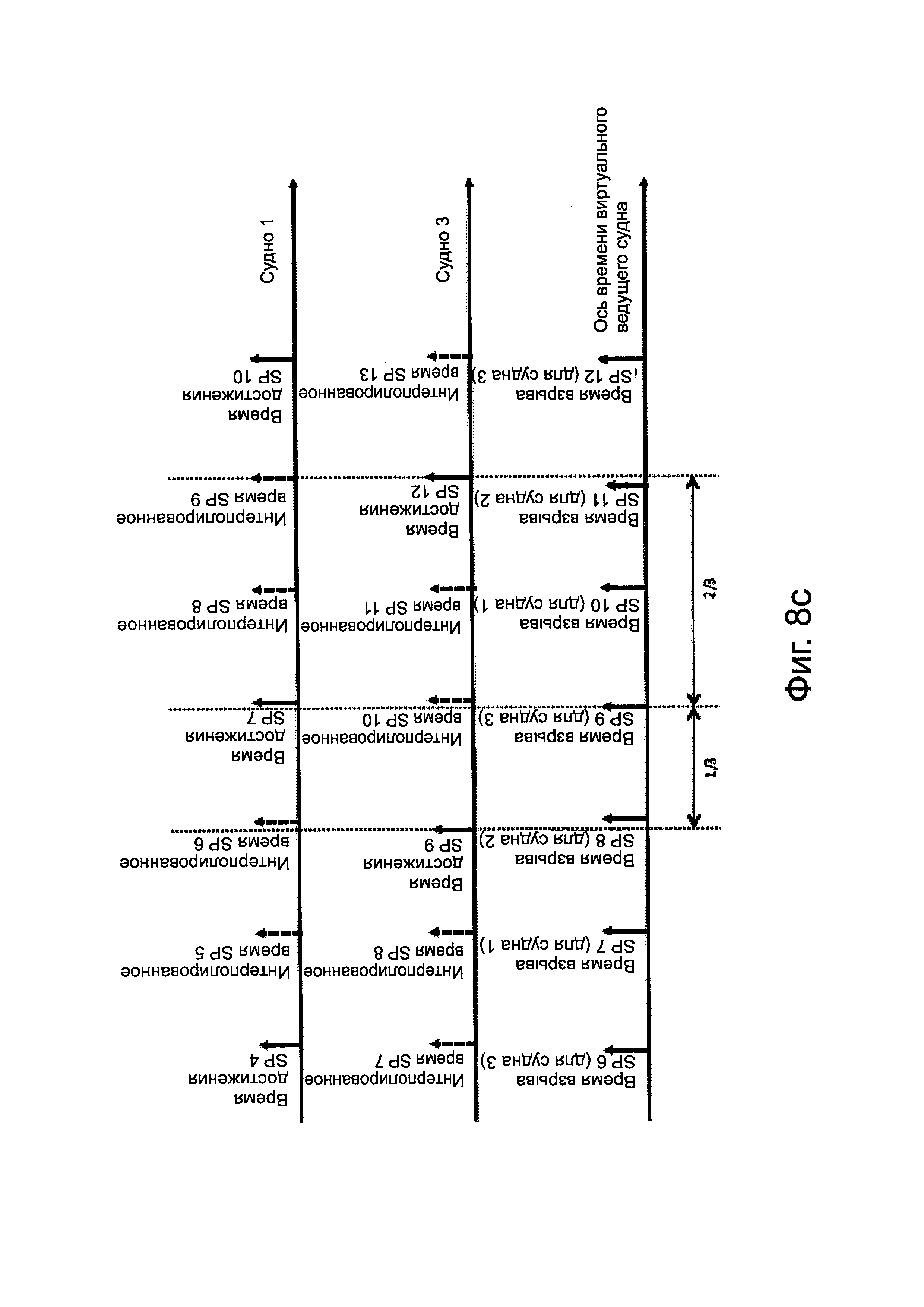
На фиг. 8a-8d представлен тот же пример, что и на фиг. 7a-7d, но для вычисления расчетных времен.
В данном примере система включает в себя три судна: ведущее судно M (судно 1), ведомое судно (судно 2) и новое ведущее судно (судно 3). На упомянутых фиг. 8a-8d показаны только оси времени для старого и нового ведущих судов, а также ось времени для виртуального ведущего судна.
На каждой оси времени старого и нового ведущих судов "время достижения пункта взрыва" обозначено черной линией, снабженной номером "SP i" пункта взрыва, а интерполированное "время достижения пункта взрыва" обозначено точечной линией, снабженной номером "SP j" пункта взрыва. На оси времени виртуального ведущего судна "времена взрывов" двух других судов (старого и нового ведущих судов) обозначены черной линией.
В данном варианте осуществления изобретения ось времени виртуального ведущего судна используется в качестве оси реальных расчетных времен взрывов для всех судов.
На фиг. 8а представлено исходное состояние в момент времени Т=0, когда виртуальное ведущее судно вычисляют в функции старого ведущего судна. Действительно, как можно видеть, "времена взрывов" на оси времени виртуального ведущего судна соответствуют "временам достижения пунктов взрыва" и интерполированным "временам достижения пунктов взрыва" на оси времени старого ведущего судна. Это проиллюстрировано вертикальной точечной линией на примере "времени взрыва SP 9".
На фиг. 8b представлено состояние в момент времени Τ = Длительность перехода/3, когда виртуальное ведущее судно вычисляют в функции средневзвешенного положения старого ведущего судна и нового ведущего судна. Как видно из чертежа, "времена взрывов" на оси времени виртуального ведущего судна не соответствуют ни "временам достижения пунктов взрыва" на оси времени старого ведущего судна, ни "временам достижения пунктов взрыва" на оси времени нового ведущего судна. Например, "время взрыва SP 9", взятое для иллюстрации этого, более не соответствует "времени достижения пункта взрыва SP 9" на оси времени старого ведущего судна.
На фиг. 8с представлено состояние в момент времени Τ = Длительность перехода *2/3, когда виртуальное ведущее судно вычисляют в функции усредненного положения старого ведущего судна и нового ведущего судна. Как видно из чертежа, "времена взрывов" на оси времени виртуального ведущего судна не соответствуют ни "временам достижения пунктов взрыва" на оси времени старого ведущего судна, ни "временам достижения пунктов взрыва" на оси времени нового ведущего судна.
На фиг. 8d представлено окончательное состояние в момент времени Τ = Длительности перехода, когда виртуальное ведущее судно вычисляют в функции только нового ведущего судна. В самом деле, как видно из чертежа, "времена взрывов" на оси времени виртуального ведущего судна соответствуют "временам достижения пунктов взрыва" и "временам достижения пунктов взрыва" на оси времени нового ведущего судна.
Например, "время взрыва SP 9", взятое в качестве иллюстрации этого, теперь соответствует "времени достижения пункта взрыва SP 9" на оси времени нового ведущего судна.
На фиг. 9 представлен второй пример второго частного варианта осуществления способа управления сменой ведущего судна (при постепенной смене) с предотвращением наложения взрывов.
На фиг. 9 показана система с тремя судами (старое и новое ведущие суда и ведомое судно-источник), соответствующая примеру, показанному на фиг. 8b, с исключения возможности наложения взрывов, как это описано для примера в заявке на патент ЕР 12306473.5, поданной от имени лица, подавшего настоящую заявку.
В частности, на фиг. 9 способ вычисления для виртуального ведущего судна серии расчетных времен взрывов для трех судов (старого ведущего судна (судна 1), ведомого судна-источника (судна 2) и нового ведущего судна (судна 3)) и ее использования в качестве временных окон для осуществления взрывов для всех судов, включая старое и новое ведущие суда.
В показанной здесь типовой ситуации ведомое судно-источник (судно 2) использует свои "времена достижения пунктов взрывов" (SP 5, SP 8 и SP 11) в качестве расчетных времен взрывов, т.к. эти "времена достижения пунктов взрывов" попадают во временные окна для осуществления взрывов.
Для судна 3 (новое ведущее судно) его "времена достижения пунктов взрывов" (SP 9 и SP 12) опережают временные окна для осуществления взрывов, так что это судно использует самые передние края окон.
Для судна 1 (старое ведущее судно) его "времена достижения пунктов взрывов" (SP 4, SP 7 и SP 10) запаздывают относительно окон, так что это судно использует самые задние края окон.
В виду того, что окончательное расчетное время взрыва для ведомого судна-источника совпадает с ближайшим краем окна для осуществления взрывов или совпадает со временем достижения пункта взрыва, если эта точка попадает в окно, то ошибка положения пункта взрыва (ошибка по оси времени от реального пункта взрыва до планируемого пункта взрыва) минимальна или равна нулю, если расчетная точка попадает в окно. Кроме того, обеспечивается запланированная очередность осуществления взрывов судами.
В виду того, что в данном частном варианте осуществления изобретения временные окна для осуществления взрывов вычисляются исходя из расчетного положения виртуального ведущего судна, это позволяет оптимизировать ошибку положения пункта взрыва даже в процессе постепенного переключения для всех ведомых судов, а также для старого и нового ведущих судов, в то же время обеспечивая правильное распределение взрывов между судами.
На фиг. 10 представлен третий пример второго частного варианта осуществления способа управления сменой ведущего судна (при постепенной смене), позволяющий распределить между двумя судами, буксирующими сейсмические косы, ошибку покрытия в результате неполного охвата.
В данном примере виртуальное ведущее судно может вычисляться непрерывно в качестве ведущего судна посредством усреднения положений судов (½ от судна А, ½ от судна В) или (1/N судна A1, 1/N судна А2 … 1/N судна A(N)) в течение всего времени или части времени съемки.
Такая ситуация, как правило, полезна при проведении съемки с помощью двух (или более) судов, буксирующих сейсмические косы, и одного или нескольких судов только с сейсмическими источниками. Как правило, суда обычно недостаточно выровнены по одной линии. Если взрывы, осуществляемые ведомыми судами, выровнены по положению и времени взрывов только по физическому ведущему судну, взрыв и покрытие будут лучше для ведущего судна, чем для ведомого судна, буксирующего сейсмические косы. Используя виртуальное ведущее судно, которое, по сути, представляет собой усреднение двух или нескольких судов, буксирующих сейсмические косы, позволяет распределить ошибку между судами, буксирующими сейсмические косы.
На фиг. 10 показана система с двумя судами А и D, буксирующими сейсмические косы, и двумя судами В и С с сейсмическими источниками, в которой судно А в начале съемки является ведущим судном. Затем, в заданный момент времени в ходе съемки вычисляют виртуальное ведущее судно, усредняя 50% судна А и 50% судна D. Осуществляют постепенную смену для переключения с ведущего судна А на виртуальное ведущее судно (50% А+50% D) и затем осуществляют постепенную смену для переключения с виртуального ведущего судна (50% А+50% D) на ведущее судно D.
Например, первую постепенную смену начинают, когда судно D входит в зону съемки, а вторую постепенную смену начинают прежде чем судно А покинет зону съемки.
По меньшей мере в одном из вариантов осуществления изобретения предлагается технология управления сменой ведущего судна в системе сейсморазведки с несколькими судами, содержащей ведущее судно M и по меньшей мере одно ведомое судно, при этом такая технология обеспечивает непрерывность съемки даже несмотря на то, что ведущее судно не в состоянии выполнять свои функции.
По меньшей мере в одном из вариантов осуществления изобретения предлагается технология такого рода, которая исключает пропуски взрывов.
По меньшей мере в одном из вариантов осуществления изобретения предлагается технология такого рода, которая обеспечивает регулярные по времени взрывы для всех судов, вовлеченных в операцию.
По меньшей мере в одном из вариантов осуществления изобретения предлагается простая в реализации и недорогая технология такого рода.
Реферат
Изобретение относится к области сбора геофизических данных. Для управления сменой ведущего судна в системе сейсморазведки с несколькими судами, содержащей ведущее судно M и по меньшей мере одно ведомое судно во время по меньшей мере части операции в составе нескольких судов выполняют: этап выбора нового ведущего судна М' из по меньшей мере одного ведомого судна, инициируемый по меньшей мере одним заданным событием, и этап передачи упомянутому по меньшей мере одному ведомому судну по меньшей мере одной части информации, относящейся к смене ведущего судна с ведущего судна М, называемого старым ведущим судном, на новое ведущее судно М'. Также используют электронный блок управления, который содержит компьютерную программу, содержащую команды программного кода, при выполнении которых обеспечивается осуществление способа управления сменой ведущего судна в системе сейсморазведки с несколькими судами. Достигается легкость и простота в управлении сменой ведущего судна в системе сейсморазведки с несколькими судами, исключение пропуска взрывов и регулярность взрывов по времени для всех судов. 4 н. и 13 з.п. ф-лы, 27 ил.
Комментарии