Система помощи в позиционировании для грузовика с вибратором и соответствующий грузовик с вибратором и способ - RU2721444C1
Код документа: RU2721444C1
Чертежи


Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Раскрытые здесь варианты осуществления изобретения в общем случае относятся к грузовикам с вибратором и способам позиционирования и управления вибрационными системами, включенными в грузовики с вибратором.
ОПИСАНИЕ УРОВНЯ ТЕХНИКИ
Ниже будут описаны проблемы, присутствующие в области сбора сейсмических данных для разведки на нефть. Изобретение, конечно, не ограничивается этой конкретной областью применения, но представляет интерес для любого специалиста, имеющего дело с родственными или аналогичными вопросами и проблемами.
При сборе и обработке сейсмических данных генерируется профиль (изображение) геофизической структуры (геологической среды) под грунтом.
Хотя этот профиль не обеспечивает точного местонахождения залежей нефти и газа, он дает специалисту общее представление о наличии или отсутствии нефти и/или газа. Таким образом, обеспечение изображений геологической среды в высоком разрешении является непрекращающимся процессом разведки природных ресурсов, в том числе нефти и/или газа.
В операциях сбора сейсмических данных на площадке традиционно используются сети сейсмических датчиков, например, геофонов.
Способ сейсморазведки базируется на анализе отраженных сейсмических волн.
Для сбора геофизических данных на поверхности земли, один или более сейсмических источников, контактирующих с землей, активируются для распространения последовательности всенаправленных сейсмических волн. Последовательность волн, отраженных пластами геологической среды, регистрируется датчиками, например, геофонами, которые генерируют сигнал, характеризующий отражение волн на геологических границах геологической среды.
Например, из патентов US8689928 и US9651692 известно использование грузовика с вибратором для генерации вибраций в земле в качестве искусственного сейсмического источника. Традиционно, грузовик с вибратором содержит транспортное средство (также именуемое "подвижной платформой") и вибрационную систему (также именуемую “трясуном”) относительное расположение которых изменяется спускоподъемной системой (также именуемой “приземным агрегатом”).
Функция вибрационной системы состоит в том, чтобы воздействовать на землю переменной силой (например, изменяющейся по синусоидальному закону) заранее определенного номинального значения.
Для этого вибрационная система включает в себя вибрационную часть и излучающую плиту (также именуемую “опорную плиту”) для соединения с землей. Излучающая плита используется для передачи вибраций, генерируемых вибрационной частью, через толщу земли.
Вибрационная часть включает в себя реактивную массу, и вибрационная система выполнена с возможностью заставлять излучающую плиту вибрировать, реагируя на движение реактивной массы.
Таким образом, вибрационная часть используется для генерации сейсмической волны и для передачи ее в толщу земли с помощью излучающей плиты.
В ходе сейсморазведки сейсмический источник должен активироваться в разных заранее заданных положениях, пока геофоны регистрируют соответствующие распространяющиеся акустические сигналы. Таким образом, водитель грузовика с вибратором направляет грузовик с вибратором в первое целевое местоположение пункта вибровозбуждения. Как только грузовик с вибратором оказывается в местоположении пункта вибровозбуждения, водитель инициирует опускание вибрационной системы для соединения излучающей плиты с землей и активирует вибрационную часть (привод), благодаря чему, излучающая плита передает в землю вибрации, генерируемые вибрационной частью. Занят вибрационный агрегат поднимается, и водитель направляет грузовик с вибратором во второе целевое местоположение пункта вибровозбуждения.
Однако, поскольку разведка предусматривает активацию сейсмического источника, образованного вибрационной системой грузовика с вибратором, в многочисленных пунктах вибровозбуждения, такая разведка требует много времени и соответствующих материальных затрат.
Таким образом, требуется сократить время, необходимое для проведения сейсморазведки с помощью грузовика с вибратором.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно варианту осуществления, предусмотрена система помощи в позиционировании для грузовика с вибратором, причем упомянутый грузовик с вибратором содержит:
– вибрационную систему, содержащую вибрационную часть и излучающую плиту, используемую для передачи вибраций, генерируемых вибрационной частью, через землю;
– спускоподъемную систему для подъема и опускания вибрационной системы,
причем система помощи в позиционировании выполнена с возможностью:
– определять расстояние до пункта вибровозбуждения между грузовиком с вибратором и местоположением пункта вибровозбуждения;
– определять остановочное расстояние для остановки грузовика с вибратором в местоположении пункта вибровозбуждения, согласно определенной текущей скорости грузовика с вибратором и согласно профилю скорости;
– определять время остановки грузовика с вибратором в местоположении пункта вибровозбуждения согласно текущей скорости грузовика с вибратором, когда остановочное расстояние соответствует упомянутому расстоянию до пункта вибровозбуждения;
– инициировать опускание излучающей плиты вибрационной системы, при выполнении по меньшей мере следующего условия: упомянутое время остановки меньше или равно времени опускания вибрационной системы на поверхность земли.
Такая конфигурация системы помощи в позиционировании и, таким образом, грузовика с вибратором, подлежащего снабжению упомянутой системой помощи в позиционировании, позволяет сократить время, необходимое для проведения сейсморазведки с помощью грузовика с вибратором.
Эта конфигурация позволяет не ждать полной остановки грузовика с вибратором в целевом местоположении пункта вибровозбуждения, чтобы начать опускать излучающую плиту.
Действительно, благодаря системе помощи в позиционировании, также именуемой блоком самонаведения или контроллером самонаведения, опускание излучающей плиты инициируется прежде чем грузовик с вибратором достигнет местоположения пункта вибровозбуждения. Система помощи в позиционировании грузовика с вибратором проверяет выполнение условий (правил) инициирования опускания излучающей плиты во избежание слишком раннего начала опускания.
Сравнение продолжительности опускания, т.е. времени от инициирования опускания до окончания опускания излучающей плиты, с временем остановки грузовика с вибратором в местоположении пункта вибровозбуждения, позволяет определить, что излучающая плита не завершила (закончила) свое опускание, пока грузовик с вибратором все еще движется, что может привести к повреждению излучающей плиты в результате столкновения с препятствием, например, камнем на поверхности земли. Действительно, предполагается, что в конце опускания излучающая плита контактирует с землей.
Кроме того, согласно конкретным вариантам осуществления, система помощи в позиционировании грузовика с вибратором допускает конкретное автоматическое управление скоростью грузовика с вибратором, которое позволяет поддерживать точное и надежное позиционирование грузовика с вибратором в целевом местоположении пункта вибровозбуждения, пользуясь преимуществами инициирования излучающей плиты до остановки, т.е. тем, что опускание излучающей плиты начинается до достижения местоположения пункта вибровозбуждения и заканчивается, когда грузовик с вибратором останавливается в местоположении пункта вибровозбуждения.
Система помощи в позиционировании, будучи задействована (взведена), может автоматически, когда выполняется условие(я), связанное по меньшей мере с остановочным расстоянием и расстоянием до пункта вибровозбуждения, управлять моторной командой грузовика с вибратором для достижения местоположения пунктов вибровозбуждения и, когда выполняется условие(я), связанное по меньшей мере с временем остановки и продолжительностью опускания, инициировать опускание плиты, возможно, без какого–либо действия водителя.
Другими словами, система помощи в позиционировании грузовика с вибратором обеспечивает автоматическое инициирование опускания плиты, помогая при этом останавливать грузовик с вибратором. Это освобождает водителя от управления скоростью грузовика с вибратором, а также действия опускания излучающей плиты при приближении к местоположению пункта вибровозбуждения, оптимизируя при этом позиционирование излучающей плиты грузовика с вибратором в отношении задержки и точности местоположения.
Напротив, благодаря конфигурации грузовика с вибратором согласно уровню техники, когда водитель грузовика с вибратором ведет его к целевому пункту вибровозбуждения, грузовик с вибратором может приходить не точно в желаемое местоположение, или, исходя из того, что грузовик с вибратором может приходить в желаемое местоположение, потребуется время, чтобы излучающая плита вибрационной системы опустилась в желаемом местоположении и приготовилась генерировать вибрации.
Согласно конкретному аспекту, система помощи в позиционировании выполнена с возможностью инициировать опускание излучающей плиты вибрационной системы при выполнении по меньшей мере следующего дополнительного условия: скорость грузовика с вибратором больше первого положительного порогового значения.
Согласно конкретному аспекту, система помощи в позиционировании выполнена с возможностью инициировать опускание излучающей плиты вибрационной системы при выполнении по меньшей мере следующего дополнительного условия: скорость грузовика с вибратором меньше второго положительного порогового значения.
Согласно конкретному аспекту, система помощи в позиционировании выполнена с возможностью определять расстояние до пункта вибровозбуждения и остановочное расстояние в реальном времени, и, предпочтительно, пока система помощи в позиционировании находится во включенном состоянии.
Согласно конкретному аспекту, система помощи в позиционировании выполнена с возможностью инициировать фазу замедления при выполнении по меньшей мере следующего условия: остановочное расстояние соответствует расстоянию до местоположения пункта вибровозбуждения.
Согласно конкретному аспекту, угловой сектор задается данным угловым значением и вершиной упомянутого углового сектора, которая соответствует упомянутому местоположению пункта вибровозбуждения, причем центральная ось углового сектора проходит через упомянутое местоположение пункта вибровозбуждения и позицию грузовика с вибратором,
система помощи в позиционировании, будучи во включенном состоянии, выполнена с возможностью работать в первом режиме, именуемом режимом готовности самонаведения, согласно которому определяется продолжительность времени, в течение которого грузовик с вибратором остается внутри упомянутого углового сектора;
и при этом, когда выполняются следующие условия:
– упомянутая определенная продолжительность времени больше или равна заранее заданному значению времени, и
– упомянутое расстояние до местоположения пункта вибровозбуждения меньше заранее заданного значения, или упомянутое расстояние до пункта вибровозбуждения включено в данный диапазон расстояний,
система помощи в позиционировании выполнена с возможностью работать во втором режиме, именуемом режимом взведенного самонаведения, причем система помощи в позиционировании выполнена с возможностью сравнивать остановочное расстояние грузовика с вибратором с расстоянием до местоположения пункта вибровозбуждения, и, когда остановочное расстояние соответствует расстоянию до местоположения пункта вибровозбуждения, работать в третьем рабочем режиме, именуемом режимом активного самонаведения, причем система помощи в позиционировании выполнена с возможностью функционировать в фазе замедления.
Согласно конкретному аспекту, система помощи в позиционировании также выполнена с возможностью функционировать в фазе ограничения скорости, предпочтительно, предшествующей фазе замедления, в которой скорость грузовика с вибратором ограничена или поддерживается равной данному значению.
Согласно конкретному аспекту, система помощи в позиционировании выполнена с возможностью функционировать в упомянутой фазе замедления посредством подачи моторной команды на блок управления мотором, который соответствует команде, поступающей при отпущенной педали газа грузовика с вибратором.
Согласно конкретному аспекту, система помощи в позиционировании выполнена с возможностью функционировать в упомянутой фазе замедления посредством подачи моторной команды на блок управления мотором, который соответствует данному углу наклона линейной функции замедления.
Согласно конкретному аспекту, система помощи в позиционировании выполнена с возможностью функционировать в упомянутой фазе замедления, пока не будет достигнуто заранее заданное значение скорости, например 0,83 м/с, на котором поддерживается скорость грузовика с вибратором, пока не будет выполнено по меньшей мере следующее условие: остановочное расстояние соответствует расстоянию до пункта вибровозбуждения. Система помощи в позиционировании может быть выполнена с возможностью функционировать в дополнительной фазе замедления, также именуемой фазой окончательной регулировки, когда расстояние до пункта вибровозбуждения достигает порогового значения, соответствующего остановочному расстоянию.
Согласно конкретному аспекту, система помощи в позиционировании выполнена с возможностью генерировать профиль скорости на основе по меньшей мере:
– текущей скорости грузовика с вибратором;
– модели грузовика и местности, которая включает в себя технические параметры грузовика с вибратором и технические параметры местности, по которой перемещается грузовик с вибратором.
Согласно варианту осуществления, предусмотрен грузовик с вибратором, содержащий:
– мотор для перемещения грузовика с вибратором и систему управления, содержащую блок управления мотором для управления мотором,
– вибрационную систему, содержащую вибрационную часть и излучающую плиту, используемую для передачи вибраций, генерируемых вибрационной частью, через землю;
– спускоподъемную систему для подъема и опускания вибрационной системы,
причем система управления также включает в себя предложенную выше систему помощи в позиционировании.
Согласно варианту осуществления, предусмотрен способ опускания излучающей плиты вибрационной системы грузовика с вибратором в местоположении пункта вибровозбуждения, причем грузовик с вибратором, содержит:
– вибрационную систему, содержащую вибрационную часть и излучающую плиту, используемую для передачи вибраций, генерируемых вибрационной частью, через землю;
– спускоподъемную систему для подъема и опускания вибрационной системы,
причем способ содержит этапы:
– определения расстояния до пункта вибровозбуждения между грузовиком с вибратором и местоположением пункта вибровозбуждения;
– определения остановочного расстояния для остановки грузовика с вибратором в местоположении пункта вибровозбуждения, согласно определенной текущей скорости грузовика с вибратором и согласно профилю скорости;
– определения времени остановки грузовика с вибратором в местоположении пункта вибровозбуждения согласно текущей скорости грузовика с вибратором, когда остановочное расстояние соответствует упомянутому расстоянию до пункта вибровозбуждения;
– инициирования опускания излучающей плиты вибрационной системы, при выполнении по меньшей мере следующего условия: упомянутое время остановки меньше или равно времени опускания вибрационной системы на поверхность земли.
Согласно варианту осуществления, предусмотрен Долговременный машиночитаемый носитель, на котором хранятся программные инструкции, которые, при их исполнении компьютером или процессором системы управления предложенного выше грузовика с вибратором, предписывают компьютеру или процессору осуществлять предложенный выше способ.
Вышеупомянутые конкретные признаки, структуры или характеристики могут быть объединены любым подходящим образом в одном или более вариантах осуществления.
ПЕРЕЧЕНЬ ФИГУР
Изобретение более подробно описано ниже посредством фигур, демонстрирующих варианты осуществления изобретения.
Фиг. 1 – схема грузовика с вибратором согласно варианту осуществления изобретения;
фиг. 2 – детальный вид вибрационной системы грузовика с вибратором, например, показанного на фиг. 1;
фиг. 3 – график движения грузовика с вибратором к пункту вибровозбуждения, совместно с представлением множества зон вокруг пункта вибровозбуждения, согласно варианту осуществления изобретения;
фиг. 4 – схема, демонстрирующая множество рабочих фаз системы (контроллера) самонаведения, встроенной в грузовик с вибратором, согласно варианту осуществления изобретения;
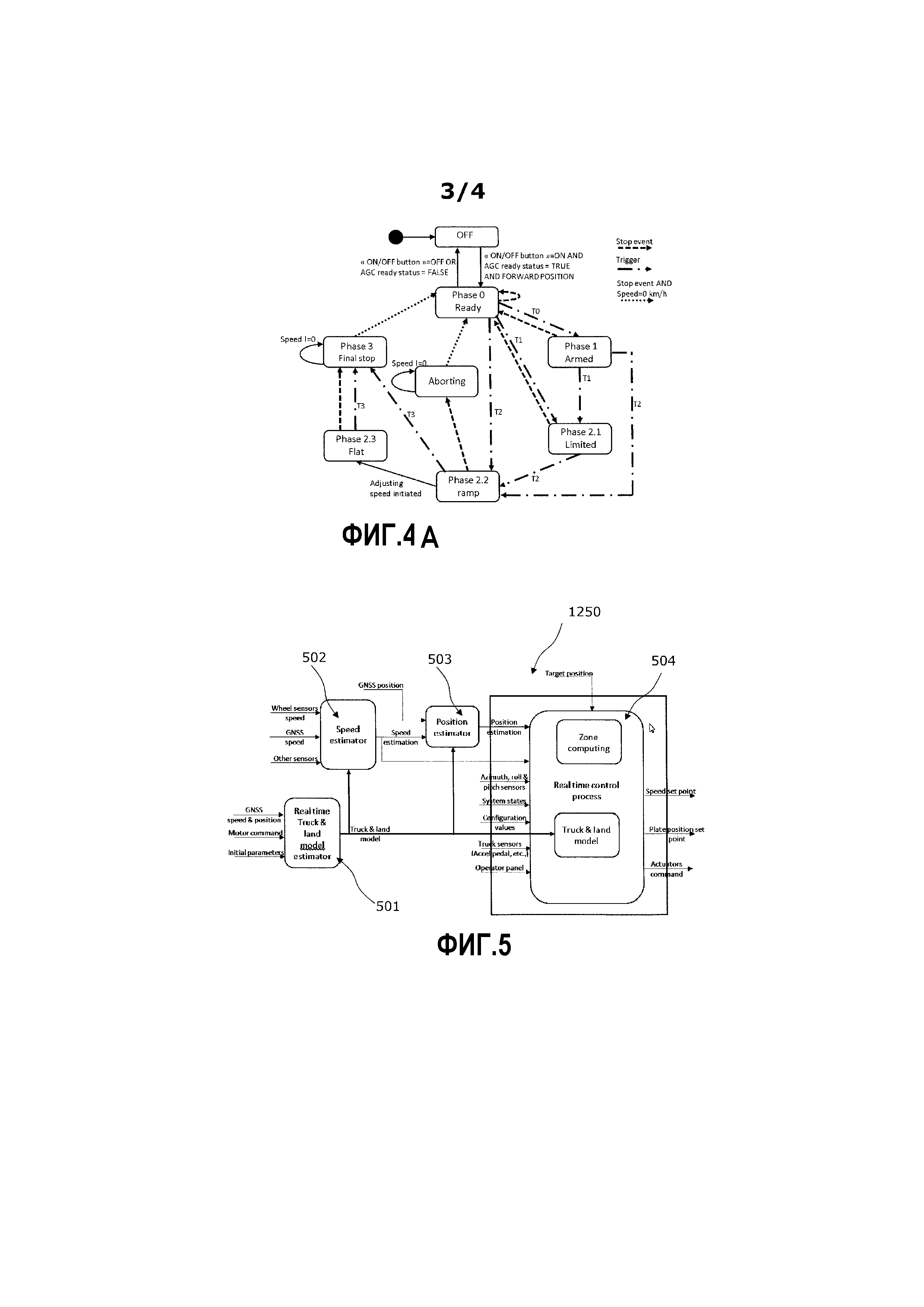
фиг. 4A – логическая схема, демонстрирующая множество рабочих фаз (или состояний) системы самонаведения, встроенной в грузовик с вибратором, согласно варианту осуществления изобретения, и переходы системы самонаведения из одного состояния в другое;
фиг. 5 – функциональная блок–схема вид системы самонаведения;
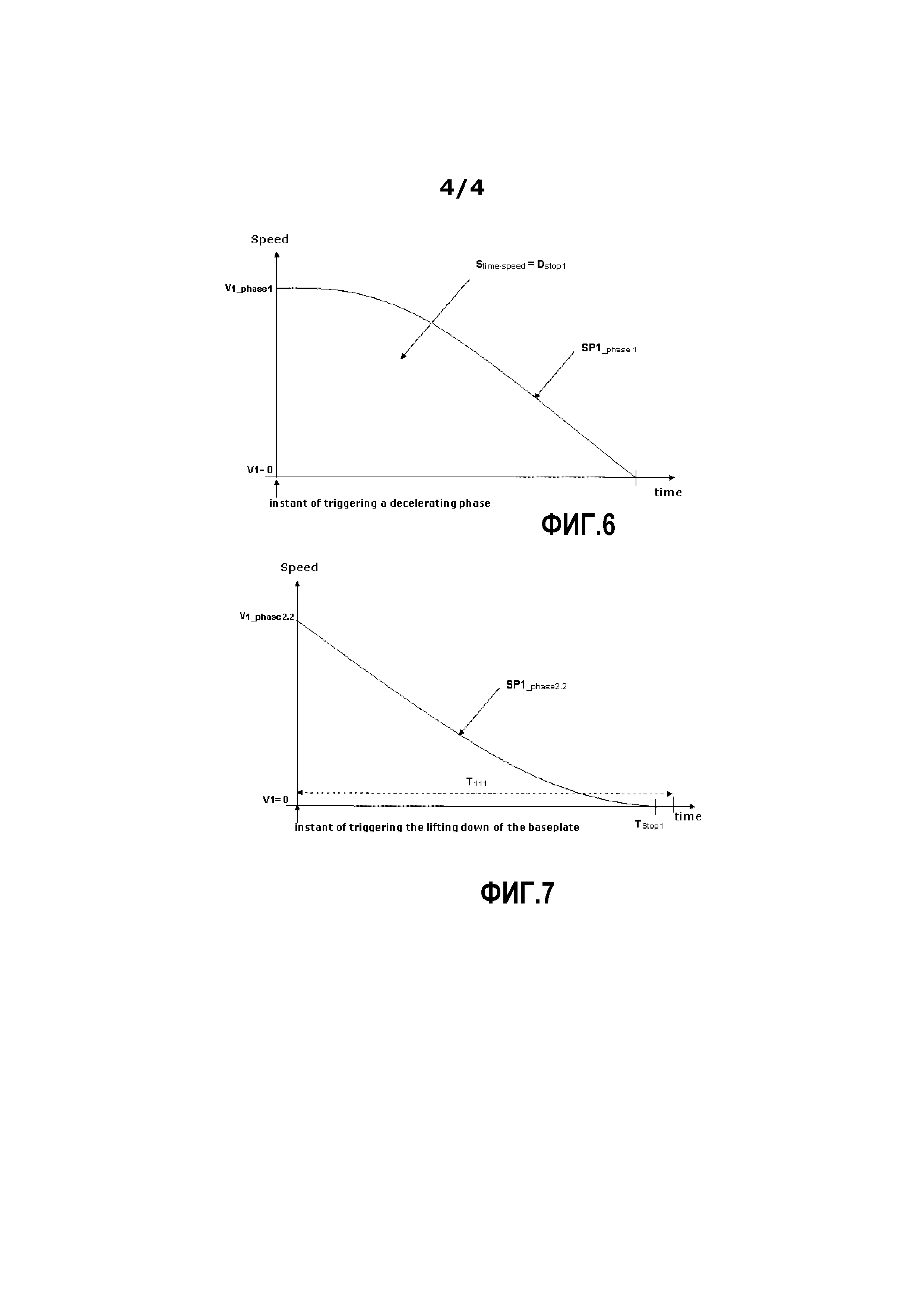
фиг. 6 – диаграмма профиля скорости, который может использоваться системой самонаведения, встроенной в грузовик с вибратором согласно варианту осуществления изобретения, при анализе условий инициирования фазы замедления;
фиг. 7 – диаграмма профиля скорости, который может использоваться системой самонаведения, встроенной в грузовик с вибратором согласно варианту осуществления изобретения, при анализе условий инициирования опускания излучающей плиты.
ОПИСАНИЕ
Нижеследующее описание вариантов осуществления опирается на прилагаемые чертежи. Одни и те же ссылочные позиции на разных чертежах идентифицируют одинаковые или аналогичные элементы. Следующее подробное описание не ограничивает изобретение. Напротив, объем изобретения задается нижеследующей формулой изобретения.
Ссылка на протяжении описания изобретения на “один вариант осуществления” или “вариант осуществления” означает, что конкретный признак, структура или характеристика, описанная в связи с вариантом осуществления, включена в по меньшей мере один раскрытый вариант осуществления изобретения. Таким образом, выражения “в одном варианте осуществления” или “согласно варианту осуществления”, появляющихся в различных местах описания изобретения, не обязательно относятся к одному и тому же варианту осуществления. Дополнительно, конкретные признаки, структуры или характеристики могут быть объединены любым подходящим образом в одном или более вариантах осуществления.
Изобретение относится к сбору геофизических и сейсмических данных на поверхности земли, в частности, с целью разработки месторождений углеводородов, с использованием транспортного средства, генерирующего вибрацию, также именуемого вибратором или грузовиком с вибратором.
Фиг. 1 демонстрирует вариант осуществления грузовика 1 с вибратором, который можно использовать для перемещения в местоположение пункта вибровозбуждения и для того, чтобы заставлять землю вибрировать в упомянутом местоположении пунктов вибровозбуждения.
Грузовик 1 с вибратором содержит транспортное средство 1001 (также именуемое "подвижной платформой") и вибрационную систему 11 (также именуемую “трясуном”), относительное расположение которых изменяется спускоподъемной системой 12 (также именуемой “приземным агрегатом”).
Функция вибрационной системы 11 состоит в том, чтобы воздействовать на землю переменной силой (например, изменяющейся по синусоидальному закону) заранее определенного номинального значения.
Для этого, вибрационная система 11 включает в себя вибрационную часть 110 и излучающую плиту 111 (также именуемую “опорной плитой”) для соединения с землей. Излучающая плита 111 используется для передачи вибраций, генерируемых вибрационной частью 110 через толщу земли.
В примере, показанном на фиг. 2, вибрационная часть 110 включает в себя реактивную массу 270 и приводной поршень 260. Поршень 260 используется, когда он работает под управлением сервоклапана, для направления реактивной массы 270, чтобы заставлять излучающую плиту вибрировать, реагируя на движение реактивной массы.
Вибрационная часть 110 также включает в себя верхнюю плиту 280 и ходули 225. Ходули, расположенные между верхней плитой 280 и излучающей плитой 111, предназначены для более равномерного распределения давления, оказываемого весом подвижной платформы на излучающую плиту 111.
Таким образом, вибрационная часть используется для генерации сейсмической волны и для передачи ее в толщу земли с помощью излучающей плиты 111. Дополнительные детали, касающиеся работы вибрационной системы 11, можно найти в патенте US 7,499,378, который включен в данное описание в порядке ссылки. В частности, описания элементов 3, 4, 200, 251–255 и 258 здесь не дано, но можно найти в вышеупомянутом патенте США.
Приземный агрегат/спускоподъемная система 12 прикреплен/а к вибрационной системе, и установлен/а для скольжения по шасси 100 транспортного средства 1001:
– во–первых для размещения вибрационного агрегата на поверхности земли или его подъема. Другими словами, приземный агрегат ведет себя, как спускоподъемная система, предназначенная для подъема вибрационного агрегата (для перемещения транспортного средства между двумя пунктами вибровозбуждения) или опускания (для его размещения на поверхности земли, в местоположении пункта вибровозбуждения); и
– во–вторых для переноса веса подвижной платформы на излучающую плиту 111 и верхнюю плиту 280, которая, таким образом, прилагает статическую предварительную нагрузку в направлении вдоль оси A111, для увеличения мощности вибрации, передаваемой в землю.
В примере, показанном на фиг. 2, спускоподъемная система включает в себя направляющие втулки 240, установленные на шасси 100 транспортного средства, в которых могут скользить подъемные (направляющие) колонны 290, по меньшей мере одну опору (также именуемую “балкой”) 230, прикрепленную к нижней части направляющих колонн 290 и более или менее перпендикулярную подъемным (направляющим) колоннам 290, и подъемные цилиндры 220, установленные между шасси 100 и опорой 230 для управления переносом веса транспортного средства на вибрационном агрегате.
Грузовик 1 с вибратором содержит мотор 1300, например, дизельный двигатель, для перемещения (вождения) грузовика 1 с вибратором.
Система 1200 управления содержит блок 1260 управления мотором для управления мотором 1300. Блок 1260 управления мотором может управлять нагнетательным насосом и соответствующими инжекторами мотора, для управления скоростью грузовика с вибратором. Грузовик 1 с вибратором включает в себя систему водительских команд, которая традиционно включает в себя рулевое колесо, педаль газа и педаль тормоза и которую можно рассматривать как часть системы 1200 управления.
Грузовик 1 с вибратором включает в себя контроллер излучающей плиты, который управляет спускоподъемной системой 12 и который можно рассматривать как часть системы 1200 управления.
Система 1200 управления также включает в себя систему 1250 помощи в позиционировании, также именуемую системой самонаведения. Система самонаведения является электронной системой, которая может быть образована контроллером, который можно добавлять в существующую или перспективную систему управления грузовика с вибратором, или которая может иметь по меньшей мере части наряду с контроллером, встроенным в грузовик с вибратором.
В частности, система самонаведения может включать в себя контроллер, выполненный с возможностью приема данных от датчиков, например, приемника GPS или GNSS, осуществления доступа к данным, хранящимся в памяти, и выполнения программных инструкций, также именуемых программным обеспечением наведения, хранящихся в памяти. Контроллер включает в себя коммуникационные интерфейсы для передачи команд на другие контроллеры, в том числе, контроллер излучающей плиты, которые управляют подъемными цилиндрами спускоподъемной системы 12, и другой контроллер, образующий блок управления мотором, который управляет скоростью грузовика с вибратором.
В ходе работы грузовик с вибратором движется от одного пункта вибровозбуждения к другому. Пункт вибровозбуждения также может именоваться пунктом съемки.
В местоположении пункта вибровозбуждения, вибрационная система генерирует вибрации, которые передаются в землю через излучающую плиту. По завершении вибраций излучающая плита поднимается, и грузовик с вибратором перемещается к следующему пункту вибровозбуждения.
Работа блока самонаведения
Согласно конкретным вариантам осуществления, блок 1250 самонаведения функционирует согласно множеству режимов (или фаз).
Первоначально блок 1250 самонаведения находится в отключенном состоянии. Блок 1250 самонаведения может переходить во включенное состояние благодаря возможности автоматического позиционирования грузовика с вибратором и автоматического опускания излучающей плиты, как объяснено ниже. Блок 1250 самонаведения может переходить между отключенным и включенным состояниями по кнопке, которую может задействовать водитель, или может использоваться любое другое подходящее средство.
Фаза 0
Согласно вариантам осуществления, после перехода системы 1250 самонаведения во включенное состояние, и, возможно, после проверки рабочих параметров, обеспечивающих статус готовности контроллер самонаведения (статус готовности AGC), блок 1250 самонаведения входит в режим готовности самонаведения, также именуемый “фазой 0” на фиг. 3 и 4A.
Блок 1250 самонаведения может содержать световой индикатор (например, LED), который отключается, когда блок 1250 самонаведения находится в отключенном состоянии, и который зажигается зеленым светом, когда блок 1250 самонаведения включается. Таким образом, водитель получает информацию о том, что скорость перемещения грузовика 1 с вибратором подлежит автоматическому управлению, а также об опускании излучающей плиты 111 вибрационной системы, при условии выполнения данных условий. Согласно конкретному аспекту, световой индикатор (например, LED) зажигается оранжевым светом при переходе в фазу 1, объясненную ниже.
Согласно конкретному аспекту, ускорение грузовика 1 с вибратором, например, посредством нажатия педали газа, разрешено в “фазе 0”. Ускорение также может быть разрешено в “фазе 1”, как объяснено ниже.
В “фазе 0”, блок 1250 самонаведения отслеживает расстояние Dvp1(от текущей позиции грузовика 1 с вибратором) до местоположения пункта VP вибровозбуждения и параметр, именуемый “углом в плане”, который относится к курсу грузовика с вибратором.
Расстояние до местоположения пункта вибровозбуждения
Согласно предпочтительному варианту осуществления, когда система 1250 самонаведения находится во включенном состоянии, расстояние Dvp1 до местоположения пункта вибровозбуждения постоянно вычисляется.
Расстояние Dvp1 до местоположения пункта VP вибровозбуждения соответствует расстоянию между текущим местоположением грузовика 1 с вибратором и местоположением пункта VP вибровозбуждения, где грузовик 1 с вибратором должен располагаться, чтобы генерировать вибрации и передавать их через толщу земли.
Расстояние Dvp1 до местоположения пункта вибровозбуждения оценивается как длина отрезка, заданного местоположением пункта VP вибровозбуждения и позицией грузовика 1 с вибратором, тогда как это расстояние больше или равно данному значению. Когда это расстояние меньше данного значения, например, трех метров, считается, что грузовик 1 с вибратором находится вблизи местоположения пункта вибровозбуждения, благодаря чему, курс грузовика с вибратором влияет на надежность вычисления этого расстояния. Затем расстояние Dvp1 до местоположения пункта VP вибровозбуждения определяется как расстояние между грузовиком 1 с вибратором, и линия, которая проходит через местоположение пункта VP вибровозбуждения и ортогональна вектору скорости грузовика 1 с вибратором.
Текущее местоположение грузовика 1 с вибратором можно получить с помощью системы позиционирования, например, системы 1510 GPS или GNSS (фиг. 1), входящей в состав грузовика 1 с вибратором. Позицию грузовика 1 с вибратором можно рассматривать как позицию середины излучающей плиты грузовика с вибратором, например, где располагается антенна GPS или GNSS.
Согласно конкретному аспекту, местоположение пунктов VP вибровозбуждения может задаваться геологом до операции грузовика с вибратором, т.е. до осуществления сейсморазведки. Согласно конкретному аспекту, местоположение пунктов VP вибровозбуждения также может (повторно)вычисляться или переопределяться в ходе работы.
Пункты вибровозбуждения имеют точные положения на месторождении (например, координаты GPS или любые другие координаты GNSS), которые записываются в файле. Эти положения пунктов VP вибровозбуждения могут регистрироваться в памяти 1110 системы управления (или блока 1250 самонаведения). Положения пунктов VP вибровозбуждения могут вычисляться на центральном блоке для формирования рисунка, предпочтительно, линии или сетки на поверхности земли.
Интервал между положениями пунктов вибровозбуждения может задаваться в диапазоне от 5 метров до 50 метров. Согласно конкретному аспекту, интервал постоянен для данной разведки.
Угол в плане
Угол в плане может отслеживаться блоком 1250 самонаведения следующим образом. Угловой сектор, также именуемый конусом, задается данным угловым значением AS1, например 60°. Вершина упомянутого углового сектора соответствует местоположению пункта VP вибровозбуждения. Центральная ось A1 углового сектора S1 проходит через упомянутое местоположение пункта VP вибровозбуждения и текущую позицию грузовика 1 с вибратором.
В "фазе 0", система 1250 самонаведения отслеживает продолжительность времени TAS1, в течение которого грузовик 1 с вибратором остается внутри упомянутого углового сектора S1. Система 1250 самонаведения также отслеживает расстояние Dvp1 до местоположения пункта вибровозбуждения.
Две полупрямые, которые образуют границы углового сектора S1, соответствуют ограничениям по курсу, между которыми грузовик 1 с вибратором должен оставаться в течение по меньшей мере данной продолжительности времени, чтобы удовлетворять первому условию перехода в следующую фазу. Как объяснено ниже, следующей фазой может быть инициирование режима взведенного самонаведения (также именуемое “фазой 1”).
В ходе “фаза 0”, продолжительность времени TAS1 сравнивается с заранее заданным временем, которое может соответствовать отсчету времени. Например, отсчет времени инициируется после задания углового сектора S1. Когда грузовик 1 с вибратором выходит за пределы углового сектора S1 до окончания отсчета времени, т.е. если грузовик с вибратором недостаточно долго остается в угловом секторе S1, угловой сектор S1 переопределяется, и отсчет времени сбрасывается. Таким образом, система 1250 самонаведения остается в “фазе 0”.
Отслеживание времени (продолжительности) TAS1, в течение которого грузовик с вибратором остается в угловом секторе S1, позволяет удостовериться в том, что грузовик 1 с вибратором направляется в местоположение пункта VP вибровозбуждения, прежде чем дать разрешение на переход в следующую фазу.
Согласно конкретному аспекту, переопределение углового сектора S1 включает в себя обновление оси A1 текущей позицией грузовика 1 с вибратором. Позиция грузовика 1 с вибратором определяется в реальном времени. Когда грузовик с вибратором направляется прямо в местоположение пункта VP вибровозбуждения, упомянутая ось A1 совпадает с курсом грузовика.
Второе условие, подлежащее выполнению, относится к текущему расстоянию Dvp1 до местоположения пункта VP вибровозбуждения. Это текущее расстояние Dvp1 также определяется и сравнивается с заранее заданным расстоянием или диапазоном расстояний. Диапазон расстояний может включать в себя минимальное расстояние и максимальное расстояние, например, восемь метров для минимального расстояния и, например, двадцать метров для максимального расстояния.
Пока расстояние Dvp1 остается вне упомянутого диапазона расстояний, система 1250 самонаведения остается в “фазе 0”.
Когда упомянутая определенная продолжительность времени TAS1 больше или равна заранее заданному значению и когда упомянутое расстояние Dvp1 до местоположения пункта вибровозбуждения включено в упомянутый диапазон расстояний, система 1250 помощи в позиционировании генерирует инициирующее событие T0, обуславливающее вхождение в режим взведенного самонаведения, также именуемый фазой 1.
Как вариант, отслеживание упомянутого диапазона расстояний можно заменить проверкой, равно ли Dvp1 или меньше заранее заданному расстоянию, и если да (и при условии, что TAS1 больше или равно заранее заданному значению) система 1250 помощи в позиционировании может генерировать событие T0, инициирующее вхождение в упомянутый режим взведенного самонаведения, также именуемый фазой 1.
Согласно вариантам осуществления, система самонаведения также может быть выполнена с возможностью обеспечивать переход из “фазы 0” в другую фазу “фазу 2.1”, соответствующую фазе ограничения скорости, как объяснено ниже, без перехода через “фазу 1”. В этом случае система 1250 помощи в позиционировании непосредственно генерирует инициирующее событие T1, объясненное ниже и проиллюстрированное на фиг. 4A. Фиг. 4A иллюстрирует схему состояний системы самонаведения, где в обобщенном виде представлено ее функционирование и переходы между фазами работы.
Согласно вариантам осуществления, система самонаведения может быть выполнена с возможностью обеспечивать переход из “фазы 0” в другую фазу “фазу 2.2”, соответствующую фазе замедления, как объяснено ниже, без перехода через “фазу 1” или через “фазу 2.1”. В этом случае система 1250 помощи в позиционировании непосредственно генерирует инициирующее событие T2, проиллюстрированное на фиг. 4A.
Фаза 1
При входе в “фазу 1”, считается, что система 1250 самонаведения находится в зоне Z1 вокруг местоположения пункта VP вибровозбуждения, именуемой зоной взвода или также зоной, допускающей автоматическое управление скоростью.
Из этой зоны Z1, соответствующей “фазе 1”, система 1250 самонаведения должна инициировать автоматическое управление скоростью, а также опускание излучающей плиты 111 вибрационной системы 11, при условии, что выполняются данные условия, объясненные ниже.
В “фазе 1” система 1250 самонаведения вычисляет остановочное расстояние DStop1, которое грузовик 1 с вибратором предположительно покрывает до остановки, согласно определенной текущей скорости грузовика с вибратором и согласно профилю SP1_phase1 скорости (исходя из того, что этот профиль скорости применяется к мотору с момента, соответствующего этой определенной текущей скорости). В частности, профиль скорости задается как функция упомянутой определенной текущей скорости. Другими словами, профиль скорости зависит от текущей скорости грузовика с вибратором.
Текущая скорость может определяться блоком 1200 управления с использованием системы 1510 GPS или GNSS и/или с использованием датчика скорости, например, датчиков скорости вращения колеса, включенных в грузовик с вибратором.
Профиль скорости
Профиль скорости соответствует кривой, обеспечивающей оценочную скорость грузовика с вибратором как функцию времени. Пример профиля SP1_phase1 скорости, который система 1250 самонаведения может использовать в “фазе 1”. В частности, профиль скорости генерируется для текущего значения скорости и, предпочтительно, также для текущего значения ускорения грузовика с вибратором. Профиль SP1_phase1 скорости соответствует профилю скорости, генерируемому для текущего значения скорости и, предпочтительно, также для текущего значения ускорения грузовика с вибратором, обозначенного V1_phase1. Как объяснено ниже, профиль скорости также генерируется на основе модели грузовика и местности. В примере, приведенном на фиг. 6, профиль скорости соответствует профилю замедления, например, как если бы на блок управления мотором больше ни одной команды мощности не было отправлено от водительского интерфейса (т.е. как если бы педаль газа была полностью отпущена). Таким образом, как показано на фиг. 6, профиль скорости снижается как линейная функция. Значение линейной функции связано со значением линейной функции мотора и насосной команды, проиллюстрированной для фазы замедления (фаза 2.2) на фиг. 3 в первой, второй и третьей иллюстративных кривых (C1, C2, C3) с соответствующими значениями б, в и г (гамма) линейной функции. Согласно конкретным аспектам, команда на ускорение/замедление транспортного средства является комбинацией насосной команды и моторной команды (давления и расхода). Для упрощения, насосная и моторная команда может именоваться “моторной командой”.
Остановочное расстояние DStop1 соответствует площади Stime–speed, заданный между осью абсцисс (время) и кривой зависимости скорости от времени SP1_phase1, начиная со значения скорости, соответствующего текущему значению скорости и заканчивая нулевым значением скорости, т.е. до точки пересечения упомянутой кривой зависимости скорости от времени SP1_phase1 с осью абсцисс.
Упомянутая текущая скорость грузовика с вибратором может обеспечиваться оценивателем 502 скорости, который, как объяснено ниже в связи с фиг. 5, обеспечивает оценку скорости в качестве ввода в систему 1250 самонаведения.
Профиль скорости вычисляется в реальном времени, наряду с расстоянием Dvp1 до местоположения пункта VP вибровозбуждения. Согласно вариантам осуществления, когда остановочное расстояние DStop1 (т.е. площадь под кривой зависимости скорости от времени профиля скорости) соответствует расстоянию Dvp1 до местоположения пункта VP вибровозбуждения, система 1250 самонаведения генерирует инициирующее событие T1 или T2, которое инициирует режим активного самонаведения, также именуемый “фазой 2". “Фаза 2” включает в себя фазу замедления, также именуемую “фазой 2.2” и, возможно, окончательную постоянную скорость, также именуемую “фазой 2.3” (окончательной регулировкой). “Фаза 2” может в необязательном порядке включать в себя фазу ограничения скорости, также именуемую “фазой 2.1”.
Фаза 2
Фаза 2.1
Эта необязательная фаза ограничения скорости может инициироваться согласно инициирующему событию T1, предпочтительно, предшествующему фазе замедления (фаза 2.2).
В фазе ограничения скорости, скорость грузовика 1 с вибратором ограничивается данным значением, которое может соответствовать значению скорости, оцененному до вхождения в упомянутую фазу ограничения скорости.
Фаза 2.2
Как объяснено выше, фаза замедления (фаза 2.2) может инициироваться согласно инициирующему событию T2, когда остановочное расстояние DStop1 совпадает с расстоянием Dvp1 до пункта вибровозбуждения.
При входе в “фазу 2.2” считается, что система 1250 самонаведения находится в зоне Z2 (см. фиг. 4) вокруг местоположения пункта VP вибровозбуждения, именуемой зоной Z2 замедления.
В этой зоне Z2, система 1250 самонаведения замедляется согласно профилю скорости, соответствующему, например, профилю SP1_phase1 скорости.
Согласно конкретному варианту осуществления, фаза замедления обусловлена управлением мотора 1300 грузовика 1 с вибратором соответствующий отсутствию команды мощности от водителя, как если бы педаль газа грузовика с вибратором была полностью отпущена.
Согласно вариантам осуществления, фаза замедления (фаза 2.2) обусловлена моторной командой, обеспеченной системой 1250 самонаведения на блок 1260 управления мотором согласно которому грузовик с вибратором замедляется согласно данному углу наклона линейной функции. Упомянутый данный угол может быть функцией текущей скорости грузовика с вибратором. Угол также может быть функцией параметров, связанных с грузовиком с вибратором и/или с местностью, по которой перемещается грузовик с вибратором, которые могут обеспечиваться оценивателем 501 модели грузовика и местности, как объяснено ниже в связи с фиг. 5.
Согласно вариантам осуществления, режим активного самонаведения (“фаза 2”) также включает в себя фазу окончательной постоянной скорости (или фазу регулировки), также именуемую “фазу 2.3”. Согласно этим вариантам осуществления, при работе в “фазе 2.2”, система 1250 самонаведения отслеживает скорость грузовика с вибратором. Когда текущая скорость грузовика с вибратором падает и достигает данного значения скорости, например 0,83 м/с, и если DStop1 не соответствует Dvp1 (или если Dvp1 больше или равно заранее заданному значению), скорость грузовика с вибратором поддерживается на этом данном значении скорости.
Согласно другим вариантам осуществления, если DStop1 соответствует Dvp1 (или если Dvp1 меньше заранее заданного значения), система самонаведения также может переходить от “фазы 2.2” к другой фазе: фазе 3, без перехода через “фазу 2.3”. В этом случае система 1250 помощи в позиционировании непосредственно генерирует инициирующее событие T3, объясненное ниже и проиллюстрированное на фиг. 3 и 4A.
Фаза 2.3
Согласно вариантам осуществления, система 1250 самонаведения выполнена с возможностью инициировать фазу 2.3, когда текущее остановочное расстояние DStop1 больше не совпадает с Dvp1, и когда текущая скорость грузовика с вибратором падает и достигает данного значения скорости. Предполагается, что текущее остановочное расстояние DStop1 больше не совпадает с Dvp1, если DStop1 отличается от Dvp1 на значение dres, превышающее данное пороговое значение (которое может соответствовать радиусу кольцевой зоны Z5 допуска).
Скорость V1 грузовика с вибратором поддерживается на данном значении скорости, пока текущее остановочное расстояние DStop1 не будет соответствовать текущему расстоянию Dvp1 до пункта вибровозбуждения.
При вхождении в “фазу 2.3” считается, что система 1250 самонаведения находится в зоне Z3 вокруг местоположения пункта VP вибровозбуждения, именуемого зоной регулировки окончательной позиции.
В этой зоне Z3, соответствующей “фазе 2.3”, система 1250 самонаведения поддерживает некоторую скорость для компенсации слишком короткого остановочного расстояния DStop1 по отношению к расстоянию Dvp1 до пункта вибровозбуждения.
Текущее остановочное расстояние DStop1 можно рассматривать как соответствующее текущему расстоянию до пункта вибровозбуждения Dvp1, когда Dvp1=DStop1+dres, где dres – значение, меньшее данного значения, соответствующего позиции допуска вокруг местоположения пункта вибровозбуждения. Это данное значение можно рассматривать как радиус кольцевой зоны Z5 допуска, как показано на фиг. 4. Этот аспект также применяется для анализа DStop1 в других фазах.
Согласно вариантам осуществления система 1250 самонаведения выполнена с возможностью окончания “фазы 2.3”, когда текущее остановочное расстояние DStop1 совпадает с текущим расстоянием Dvp1 до пункта вибровозбуждения. Согласно вариантам осуществления, это можно получить посредством определения, когда текущее расстояние Dvp1 до пункта вибровозбуждения достигает данного порогового значения. Это значение может соответствовать расстоянию, покрываемому грузовиком 1 с вибратором, при условии отпуска (отсутствия) команды ускорения, в то время как грузовик с вибратором имеет текущую скорость, соответствующую упомянутому поддерживаемому значению скорости.
Затем система 1250 самонаведения генерирует инициирующее событие T3, которое инициирует режим окончательной остановки, также именуемый “фазой 3”.
Согласно вариантам осуществления и как показано на фиг. 4A, инициирующее событие T3 также может генерироваться в фазе 2.2 (фазе замедления) для инициирования “фазы 3” без перехода через “фазу 2.3”.
Фаза 3
“Фаза 3” позволяет останавливать грузовик в местоположении пункта вибровозбуждения.
В “фазе 3” система 1250 самонаведения подает команды на блок управления мотором для замедлении грузовика с вибратором.
Этим окончательным замедлением можно управлять на “фазе 2.2” согласно данному профилю скорости, который может соответствовать заранее заданной линейной функции замедления. Окончательное замедление, инициированное системой самонаведения, может соответствовать отсутствию команды мощности от водителя, как если бы педаль газа была отпущена.
Опускание излучающей плиты
Система 1250 помощи в позиционировании вычисляет расстояние до пункта вибровозбуждения Dvp1 между грузовиком 1 с вибратором и местоположением пункта VP вибровозбуждения. Система 1250 помощи в позиционировании также вычисляет остановочное расстояние DStop1 для остановки грузовика 1 с вибратором в местоположении пункта вибровозбуждения, согласно определенной текущей скорости грузовика с вибратором и согласно профилю скорости.
Иллюстративный профиль скорости, именуемый SP1_phase2.2, проиллюстрирован на фиг. 7. Этот профиль скорости соответствует профилю скорости, генерируемому для текущего значения скорости (и, предпочтительно, также для текущего значения ускорения) грузовика с вибратором, обозначенному V1_phase2.2. Опускание предпочтительно инициировать в фазе замедления 2.2, но может инициировать в другой момент, в частности, с момента фазы 1. Как объяснено ниже, профиль скорости также генерируется на основе модели грузовика и местности. В примере, приведенном на фиг. 7, профиль скорости соответствует профилю замедления, например, как если бы на блок управления мотором больше ни одной команды мощности не было отправлено от водительского интерфейса (т.е. как если бы педаль газа была полностью отпущена). Таким образом, как показано на фиг. 7, профиль скорости снижается по закону линейной функции.
Система самонаведения выполнена с возможностью определения времени TStop1 остановки грузовика 1 с вибратором в местоположении пункта вибровозбуждения согласно текущей скорости грузовика с вибратором, когда оценочное остановочное расстояние DStop1 соответствует упомянутому расстоянию до пункта вибровозбуждения Dvp1.
Это время TStop1 соответствует времени, когда скорость согласно кривой профиля замедления достигает нуля (т.е. время, когда кривая замедления пересекает ось абсцисс).
Опускание излучающей плиты может инициироваться, когда время TStop1 остановки грузовика 1 с вибратором в местоположении пункта вибровозбуждения меньше или равно времени T111 опускания вибрационной системы 11 на землю. В это время TStop1 считается, что грузовик 1 с вибратором находится в зоне Z4 (зоне инициирования опускания излучающей плиты).
Это время T111 может быть заранее заданным значением, которое может быть ранее измерено и сохранено в памяти системы самонаведения. Это значение может быть внешними данными, например, обеспеченными конструктором вибрационной системы. Это время соответствует продолжительности между моментом инициирования опускания излучающей плиты и моментом завершения опускания излучающей плиты, которые можно обнаруживать с помощью датчиков (акселерометров, системы GPS/GNSS), регистрирующих вибрации, когда излучающая плита касается земли. Существующие в настоящее время датчики, например переключатель давления, для обнаружения нижней позиции излучающей плиты и/или другой датчик расстояния для управления фактической высотой излучающей плиты относительно земли также можно использовать совместно.
Согласно вариантам осуществления, в частности, по причинам безопасности, опускание излучающей плиты не может автоматически инициироваться, если скорость транспортного средства ниже некоторого значения. Несмотря на то, что присутствие людей под грузовиком не разрешено, когда грузовик работает, это препятствует случайному присутствию человека при опускании излучающей плиты, например, для поддержания оператора.
Опускание вибрационной системы может быть обусловлено скоростью грузовика, которая ниже положительного порогового значения. Такой критерий позволяет определять, что грузовик с вибратором движется не слишком быстро и со скоростью, например, медленнее 1,3 м/с, которая позволяет надежно останавливаться за короткое время. Условие для опускания может состоять в том, что грузовик с вибратором находится в фазе замедления или движется с постоянной скоростью после упомянутой фазы замедления.
Дополнительное условие инициирования фазы 2.3 может состоять в том, что время t11rem, оставшееся до касания земли излучающей плитой 111 вибрационной системы 11, больше или равно текущему времени остановки TStop1 плюс остаточное время tres, которое является заданным значением.
Согласно вариантам осуществления, опускание излучающей плиты инициируется только при активации фазы замедления.
Согласно вариантам осуществления, предлагается постоянно вычислять время, необходимое для остановки грузовика на или вблизи пункта вибровозбуждения (если пункт располагается внутри зоны допуска), и расстояние до пункта вибровозбуждения.
Система и параметры самонаведения
Система 1250 самонаведения соответствует информационной и электронной системе, которая использует:
– оцениватель 501 модели грузовика и местности в реальном времени, который обеспечивает модель грузовика и местности на основе предварительного анализа и/или вычисления в реальном времени. Эта модель грузовика и местности может принимать в качестве вводов: скорость и позицию грузовика с вибратором, обеспеченные системой GNSS, и моторную команду. В качестве ввода также можно использовать начальные параметры, например, тип местности, тип моторизации, рабочий цикл инжекторов мотора.
– оцениватель 502 скорости, использующий датчики скорости колеса и систему GNSS для обеспечения скорости грузовика с вибратором в качестве вводов. Модель грузовика и местности также используется в качестве вводов оценивателя скорости. Оцениватель скорости выводит оценку скорости, которая используется в качестве ввода оценивателем 503 позиции совместно с позицией грузовика с вибратором, обеспеченной системой GNSS. Оцениватель позиции выводит оценку позиции грузовика с вибратором.
– контроллер 604, который может принимать в качестве вводов:
– оценку позиции, обеспеченную оценивателем позиции, который можно использовать для повышения точности и доступности скорости для процесса управления в реальном времени;
– оценку скорости, обеспеченную оценивателем скорости, который можно использовать для повышения точности и доступности позиции в месторождении для процесса управления в реальном времени;
– датчики азимута, крена и тангажом, используемым процессом управления в реальном времени для повышения точности и безопасности позиции грузовика с вибратором
– значения конфигурации;
– датчики грузовика, например, педаль ускорения
– интерфейс оператора, который позволяет ему переводить систему самонаведения между отключенным и включенным состояниями. Интерфейс оператора также может отображать обратную связь, например, зеленый или оранжевый цвет светового индикатора;
– модель грузовика и местности, которая характеризует грузовик и местность для адаптации своего процесса управления в реальном времени. Такая характеризация может, например, использоваться для обновления известной фазы или задержки механических компонентов, например, клапанов или насосов для учета изменения компонентов с течением времени.
– целевую позицию, которую соответствуют местоположению пункта вибровозбуждения, где грузовик должен останавливаться.
В системе 1250 самонаведения осуществляется процесс управления в реальном времени и, когда условия выполняются, как объяснено выше, выводится заданное значение скорости, которое поступает на блок 1260 управления мотором для управления мотором и, таким образом, скоростью грузовика с вибратором. Система самонаведения также выводит команду для инициирования опускания излучающей плиты при выполнении других условий, как объяснено выше.
Согласно вариантам осуществления, система самонаведения может также выводить конкретные команды приводов, например, команды на контроллеры третьей стороны для управления такими элементами, как лампы, тормоз и т.д.
Согласно конкретным вариантам осуществления, система 1250 самонаведения может, таким образом, автоматически управлять позицией излучающей плиты в ходе вибросейсмической миссии, на основе:
– позиции вибрации (местоположения пункта вибровозбуждения);
– анализа скорости грузовика с вибратором в реальном времени по мере приближения к пункту вибровозбуждения;
– предварительного и в реальном времени анализа расстояние до пункта вибровозбуждения в фазе приближения;
– предварительной и в реальном времени характеризации компонентов грузовика. Система самонаведения вычисляет и обновляет в реальном времени модель для прогнозирования поведения компонентов грузовика, например, задержки контроллера излучающей плиты или оборотов мотора по отношению к входной команде ускорения.
– предварительной и в реальном времени характеризации местности (наклона, сцепления). Система вычисляет и обновляет в реальном времени модель для прогнозирования поведения скорости относительно земли по отношению к входной команде ускорения, датчикам наклона и начальным параметрам, например, типом местность.
Система 1250 самонаведения упоминается как сопряженная, когда в отсутствие какого–либо действия система самонаведения поддается позиционированию и автоматическому опусканию излучающей плиты в следующем местоположении пункта вибровозбуждения.
Согласно конкретному аспекту, профиль скорости соответствует профилю замедления. Согласно вариантам осуществления, профиль замедления включает в себя линейную функцию замедления, имеющую данный угол линейной функции. Профиль замедления может соответствовать моторной команде, когда водитель отпускает, предпочтительно полностью, педаль газа.
Другие аспекты:
система 1250 самонаведения выполнена с возможностью отсоединения, посредством перехода в режим готовности самонаведения – фазу 0 и, возможно, в выключенное состояние, при выполнении по меньшей мере одного из следующих условий:
– физический полный отпуск педали газа регистрируется в течение заранее заданной продолжительности времени;
– регистрируется давление на педаль тормоза.
Система 1250 самонаведения также может отсоединяться посредством перехода в выключенное состояние, при выполнении по меньшей мере одного из следующих условий:
– происходит ошибка системы, например, вследствие отказа системы GNSS;
– система помощи в самонаведении отключается.
В частности фиг. 4A показывает, что событие остановки, например, соответствующее одному из вышеупомянутых условий, может инициировать выход из “фазы 2.2”, которая соответствует главной фазе замедления, что заставляет систему 1250 самонаведения возвращаться в “фазу 0”, когда скорость падает до нуля. Событие остановки в фазе “2.3” также может инициировать режим окончательной остановки “фаза 3” что заставляет систему 1250 самонаведения возвращаться в “фазу 0”, когда скорость падает до нуля.
Согласно вариантам осуществления “события остановки” могут включать в себя по меньшей мере часть следующих обнаруженных событий:
– нажатия педали тормоза
– полного отпускания педали газа
– сообщения сброса, например, “сброс самонаведения” в сети грузовика с вибратором
– кнопка включения/выключения=выключено
– параметр статус готовности контроллера самонаведения (AGC) = ложь
Согласно вариантам осуществления, блок 1200 управления позволяет грузовику с вибратором ускоряться только если выполняется по меньшей мере одно из следующих условий:
– система 1250 самонаведения находится в отключенном состоянии,
– система 1250 самонаведения находится в рабочем режиме, соответствующем режиму готовности самонаведения, также именуемому “фаза 0”;
– система 1250 самонаведения находится в рабочем режиме, соответствующем режиму взведенного самонаведения, также именуемому “фаза 1”.
В частности, из этих условий, система 1250 самонаведения выполнена с возможностью поддерживать скорость на постоянном значении или позволять замедление транспортного средства согласно линейной функции, значение угла которой может изменяться как функция значения скорости до инициирования фазы замедления.
Согласно примеру, грузовик с вибратором может представлять следующие признаки:
– дизельный двигатель и гидравлические насосы
– мощность 328 кВт
– максимальную скорость 25 км/ч
– среднюю скорость в ходе эксплуатации от 10 до 15 км/ч
– полную длину 10 метров
– колесную базу 5,5 метров
– вес 31 метрических тонн
Вышеописанные функции и этапы могут осуществляться в форме компьютерной программы или посредством аппаратных компонентов (например, программируемых вентильных матриц). В частности, функции и этапы, осуществляемые системой управления, система самонаведения или блок управления мотором, может осуществляться наборами компьютерных инструкций или модулей, реализованных процессором или контроллером или они могут осуществляться специализированными электронными компонентами типа вентильной матрицы, программируемой пользователем (FPGA) или специализированной интегральной схемы (ASIC). Можно также объединять компьютерные части и электронные части.
Компьютерные программы или компьютерные инструкции могут содержаться в устройствах хранения программ, например, машиночитаемые носители цифровых данных или исполнимых программ. Программы или инструкции также могут исполняться из периферийных устройств хранения программ.
Зона допуска соответствует зоне, где допустимо производить съемку, если расстояние между грузовиком и пунктом съемки не превышает заранее заданного предела (пример: препятствие на месторождении, которое не позволяет подъехать к пункту съемки)
Следует понимать, что это описание не призвано ограничивать изобретение. Напротив, иллюстративные варианты осуществления призваны охватывать альтернативы, модификации и эквиваленты, которые включены в сущность и объем изобретения, заданные нижеследующей формулой изобретения. Дополнительно, в подробном описании иллюстративных вариантов осуществления, многочисленные конкретные детали изложены для обеспечения полного понимания заявленного изобретения. Однако специалисту в данной области техники понятно, что различные варианты осуществления можно осуществлять на практике без таких конкретных деталей.
Хотя признаки и элементы иллюстративных вариантов осуществления описаны согласно вариантам осуществления в конкретных комбинациях, каждый признак или элемент может использоваться отдельно без других признаков и элементов вариантов осуществления или в различных комбинациях с или без других раскрытых здесь признаков и элементов.
Примеры изобретения, раскрытые в данном описании, позволяют специалистам в данный области практически применять его, в том числе создавая и используя любые устройства или системы и осуществляя любые включенные способы. Патентуемый объем изобретения задается формулой изобретения и может включать в себя другие примеры, очевидные специалистам в данной области техники. Такие другие примеры подлежат включению в объем формулы изобретения.
Реферат
Изобретения относятся к грузовикам с вибратором и системам позиционирования. Система помощи в позиционировании для грузовика с вибратором содержит вибрационную систему, спускоподъемную систему для подъема и опускания вибрационной системы. Система помощи в позиционировании выполнена с возможностью определять расстояние до пункта вибровозбуждения между грузовиком с вибратором и местоположением пункта вибровозбуждения, определять остановочное расстояние для остановки грузовика с вибратором в местоположении пункта вибровозбуждения, определять время остановки грузовика с вибратором в местоположении пункта вибровозбуждения согласно текущей скорости грузовика с вибратором, инициировать опускание излучающей плиты вибрационной системы при выполнении, по меньшей мере, следующего условия: упомянутое время остановки меньше или равно времени опускания вибрационной системы на поверхность земли. Грузовик с вибратором содержит мотор для перемещения грузовика с вибратором и систему управления, содержащую блок управления мотором для управления мотором, вибрационную систему, содержащую вибрационную часть и излучающую плиту, используемую для передачи вибраций через землю и спускоподъемную систему для подъема и опускания вибрационной системы. Достигается повышение эффективности проведения сейсморазведки. 4 н. и 11 з.п. ф-лы, 8 ил.
Комментарии