Контроль качества для широкополосных свип-сигналов - RU2665346C2
Код документа: RU2665346C2
Чертежи




Описание
Область техники
Варианты осуществления изобретения в общем случае относятся к обработке данных для сейсмической разведки, а более конкретно - к обработке данных контроля качества в отношении энергии, излучаемой сейсмическим источником.
Уровень техники
Сейсморазведка включает в себя разведку подземных геологических пластов, например, для обнаружения расположения залежей углеводородов в подземных резервуарах. Инженерная сейсморазведка, как правило, включает в себя размещение источника (источников) сейсмических сигналов и датчиков сейсмических сигналов в заранее заданных местах. Эти источники генерируют сейсмические волны, которые распространяются в геологические пласты. Подземные объекты геологических пластов изменяют направление распространения или другие свойства сейсмических волн.
В сейсморазведке, выполняемой с использованием метода отраженных волн, датчики сейсмических сигналов измеряют отражения сейсмических волн от подземных объектов или границ раздела между объектами. Глубина и горизонтальное расположение объектов, вызывающих отражения сейсмических волн, оцениваются путем измерения времени, которое требуется для прохождения сейсмических волн от источников сейсмических сигналов до датчиков сейсмических сигналов. Некоторые датчики сейсмических сигналов обладают чувствительностью к изменениям давления (например, гидрофоны), а другие являются чувствительными к движению частиц (например, геофоны, акселерометры). Датчики генерируют сейсмические данные измеренных отраженных сейсмических волн. Анализ данных сейсмических сигналов может затем указывать на присутствие или отсутствие вероятных мест расположения залежей углеводородов.
Один тип источника сейсмических сигналов представляет собой импульсный источник сейсмических сигналов, такой как динамит для наземной сейсморазведки или морской пневматический источник колебаний для морской сейсморазведки. Импульсный источник энергии генерирует относительное большое количество энергии, которое вводится в грунт в течение относительно короткого периода времени. Другой тип источника сейсмических сигналов представляет собой сейсмический вибратор, который используется в связи с вибросейсмическим методом сейсморазведки. Для сейсморазведки, которая проводится на суше, сейсмический вибратор излучает сейсмические волны в землю при относительно более низком уровне энергии, чем сигнал, который генерируется импульсным источником энергии. Однако энергия, которая вырабатывается сейсмическим вибратором, существует в течение относительно более долгого периода времени.
Структуры возбуждения для сейсмических вибраторов называются здесь «управляющими сигналами» и в общем случае определяются перед тем, как будут начаты сейсмометрические исследования. Управляющие сигналы настраивают (например, в отношении длительности и частотного диапазона) для конкретных предполагаемых характеристик (например, содержания влаги) вибратора и грунта в обследуемой зоне. Однако грунт на обследуемой площадке может не иметь такие характеристики. Различия между фактическими и предполагаемыми характеристиками могут снижать точность или применимость данных обследования. Поскольку сейсмические обследования могут быть достаточно затратными по времени, имеется необходимость определить в процессе проведения сейсморазведки, являются ли собранные данные достаточно точными. Это называют «контролем качества» или КК (QC - quality control). К примеру, желательно сравнить искажения, фазу и амплитуду основной гармоники между толкающим усилием (силой, прикладываемой сейсмическим источником к грунту) и управляющим сигналом, или в общем случае между сигналом источника, представляющим собой воздействие источника, и управляющим сигналом. Кроме того, недавние научные разработки в технологии вибросейсмических методов разведки позволяют создавать вибросейсмические свип-сигналы с минимальной частотой вплоть до 1 Гц и максимальной частотой до 300 Гц, по сравнению с диапазоном 8-80 Гц свип-сигналов, которые использовались ранее. Существует потребность в улучшенном контроле качества, который позволяет анализировать толкающие усилия в этом частотном диапазоне таким образом, чтобы обеспечить получение результатов, которые могут легко интерпретироваться обслуживающим персоналом на месте проведения сейсморазведки. Имеется также потребность в контроле качества, который применим при линейном возрастании низкой частоты и линейном снижении высокой частоты.
В патентной заявке США №2011/0192143 Лиу (Liu) и соавт., опубликованной 28 июля 2011 г., полное содержание которой включено в настоящий документ путем ссылки, описано, что традиционный контроль качества сейсморазведочных данных включает в себя применение линейного регрессионного анализа к данным сейсморазведки для отсортировки имеющих помехи или слабых сейсмотрасс от остальных сейсмотрасс. Линейный тренд определяется на зависимости амплитуды сейсмотрасс от смещения датчика. Линейный тренд используется для обнаружения геофизического тренда необработанной сейсмограммы ОПВ и позволяет оценивать сейсмограммы как относительно слабые или зашумленные на основе этого тренда. Таким путем пороговые значения могут быть построены выше и ниже полученного тренда для целей построения фильтра, предназначенного для отбраковки зашумленных и слабых трасс, которые выходят за пределы этих пороговых значений. Однако эта схема сама по себе может генерировать зашумленные данные, которые трудно интерпретировать в полевых условиях. Другие схемы включают в себя сравнение сигнала толкающего усилия, с управляющим сигналом в соответствующих окнах длительностью 0,5 с каждого сигнала. Ссылка также сделана на патент США №6,148,264, выданный на имя Хоука (Houck) и соавт. 14 ноября 2000 г., полное содержание которого включено в настоящий документ путем ссылки.
Однако все эти методы не дают высококачественных данных контроля качества (QC) при низких и высоких частотах. Имеется, следовательно, непрекращающаяся необходимость в способах анализа энергии, излучаемой сейсмическим источником, для определения во время сейсморазведки того, являются ли данные точными.
Раскрытие изобретения
Согласно одному варианту осуществления данного изобретения, предложен способ определения параметра контроля качества, соответствующего энергии, обеспечиваемой сейсмическим источником, причем этот способ содержит: определение огибающей управляющего сигнала (DF(t)), связанного с сейсмическим источником; нормализацию управляющего сигнала (DF(t)) и сигнала источника, используя определенную огибающую, и определение в процессоре параметра контроля качества, используя нормализованный управляющий сигнал и нормализованный сигнал источника.
Согласно другому варианту осуществления данного изобретения, предложен машиночитаемый носитель, содержащий сохраненные в памяти команды компьютерной программы, которые при их выполнении процессором заставляют процессор реализовывать способ определения параметра контроля качества, соответствующего энергии, излучаемой сейсмическим источником, причем этот способ содержит: определение огибающей управляющего сигнала (DF(t)), связанного с сейсмическим источником; измерение сигнала источника энергии, обеспеченной сейсмическим источником; нормализацию управляющего сигнала (DF(t)) и сигнала источника, используя определенную огибающую; и определение параметра контроля качества, используя нормализованный управляющий сигнал и нормализованный сигнал источника.
Согласно еще одному варианту осуществления данного изобретения, предложен механизм управления, предназначенный для реализации способа определения параметра контроля качества, соответствующего энергии, обеспечиваемой сейсмическим источником, причем этот механизм содержит: запоминающее устройство, хранящее данные управляющего сигнала (DF(t)), связанного с сейсмическим источником; и процессор, присоединенный к запоминающему устройству и предназначенный для: определения огибающей управляющего сигнала (DF(t)), используя сохраненные в памяти данные, измерения сигнала источника энергии, обеспеченной сейсмическим источником, нормализации управляющего сигнала (DF(t)) и сигнала источника, используя определенную огибающую, и определения параметра контроля качества, используя нормализованный управляющий сигнал и нормализованный сигнал источника.
Краткое описание чертежей
Для более полного понимания данного изобретения ссылка теперь делается на последующие технические описания, рассматриваемые в связи с прилагаемыми чертежами, на которых:
фиг. 1 - принципиальная схема системы приема и накопления вибросейсмических данных, выполненной согласно варианту осуществления данного изобретения;
фиг. 2 - принципиальная блок-схема способа, предназначенного для определения параметра контроля качества, соответствующего энергии, обеспеченной сейсмическим источником, согласно варианту осуществления данного изобретения;
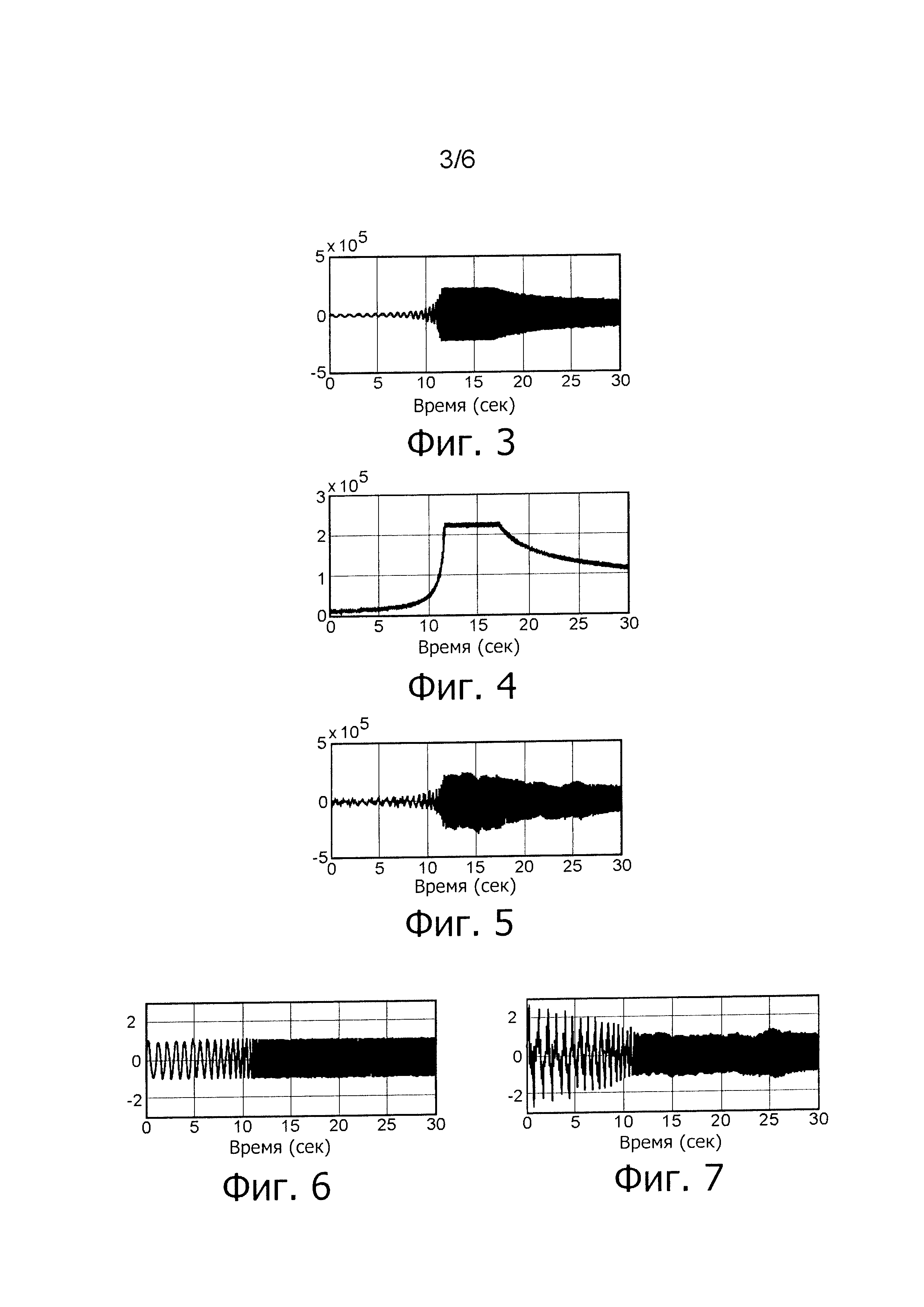
фиг. 3 - график примера управляющего сигнала;
фиг. 4 - приведен график примера огибающей примера управляющего сигнала, изображенного на фиг. 3;
фиг. 5 - график примера оцененного или измеренного сигнала силы, действующей на грунт;
фиг. 6 - график примера нормализованного управляющего сигнала, вычисленного на основании примера управляющего сигнала, показанного на фиг. 3;
фиг. 7 - график примера нормализованного сигнала силы, действующей в грунте, вычисленного на основании примера сигнала силы, действующей в грунте, показанного на фиг. 5, используя огибающую, показанную на фиг. 4;
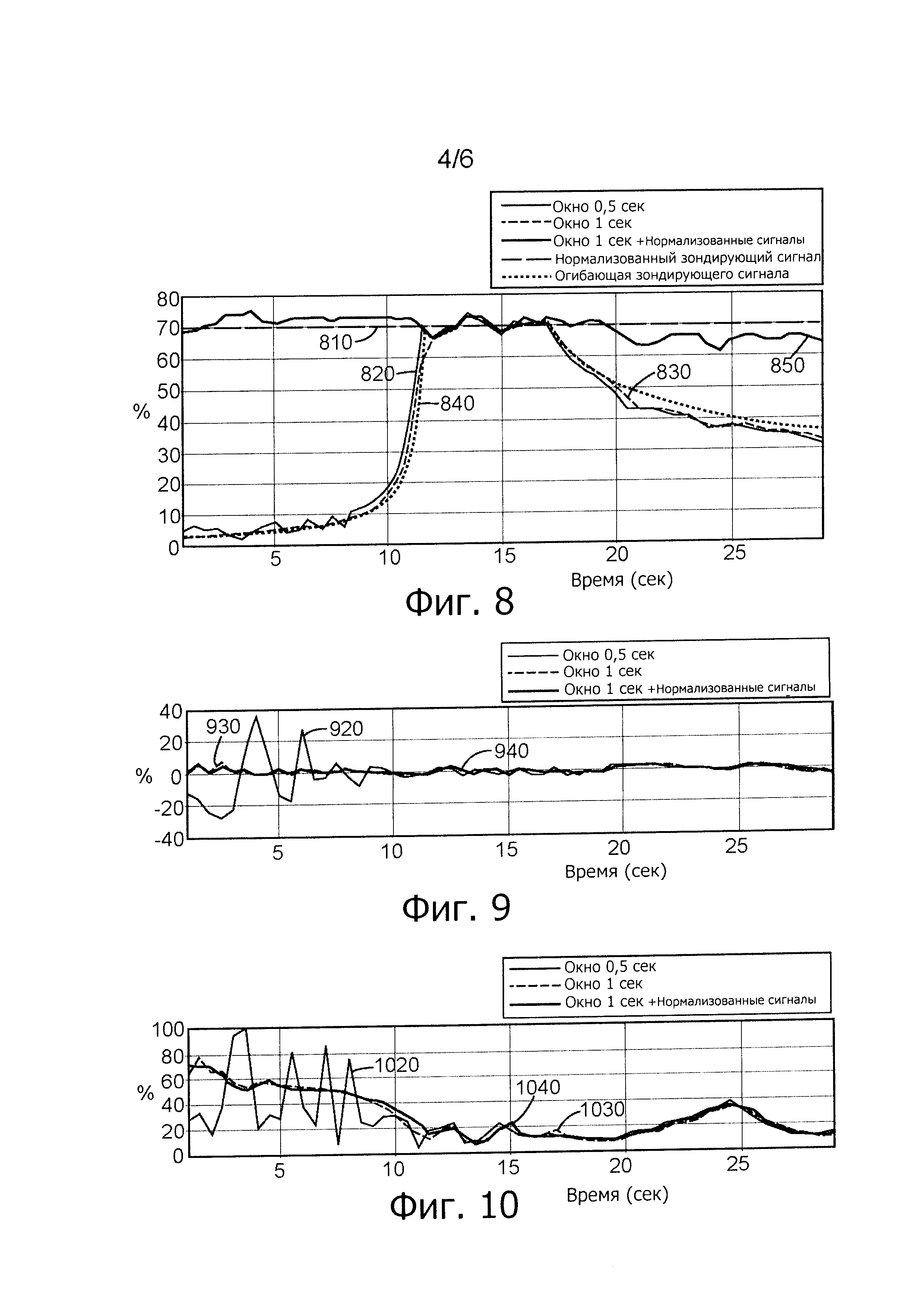
фиг. 8 - пример графика контроля качества, в котором параметр контроля качества представляет собой изменение по амплитуде;
фиг. 9 - пример графика контроля качества, в котором параметр контроля качества представляет собой изменение по фазе;
фиг. 10 - пример графика контроля качества, в котором параметр контроля качества представляет собой отклонение;
фиг. 11 - еще один пример графика контроля качества, в котором параметр контроля качества представляет собой изменение амплитуды;
фиг. 12 - диаграмма высокого уровня, показывающая компоненты управляющего механизма и относящиеся к нему компоненты.
Осуществление изобретения
Последующее описание иллюстративных вариантов осуществления данного изобретения относятся к прилагаемым чертежам. Одинаковые цифровые условные обозначения обозначают одинаковые или аналогичные элементы. Последующее подробное описание не ограничивает данное изобретение. Следующие варианты осуществления данного изобретения обсуждаются для простоты в отношении терминологии и конструкции устройства для наземной сейсмической разведки. Однако обсужденные варианты осуществления данного изобретения не ограничены этой конфигурацией, а их можно использовать в других типах сейсмических обследований, таких как буксируемые системы морской гидрографической съемки или установленные на морском дне кабельные системы гидрографической съемки.
Ссылка на протяжении данного технического описания на «один вариант осуществления изобретения» или «вариант осуществления изобретения» означает, что конкретная особенность, конструкция или характеристика, описанная в связи с вариантом осуществления данного изобретения, включена по меньшей мере в один вариант реализации описанного предмета изобретения. Таким образом, появление фраз «в одном варианте осуществления данного изобретения» или «в варианте осуществления данного изобретения» в различных местах на протяжении настоящего технического описания не обязательно относится к одному и тому же варианту осуществления данного изобретения. Кроме того, конкретные особенности, конструкции или характеристики могут сочетаться любым подходящим образом в одном или нескольких вариантах осуществления данного изобретения.
На протяжении всего этого технического описания некоторые варианты осуществления данного изобретения описаны в особенностях, которые обычно были бы реализованы в виде компьютерных программ. Специалисты в данной области техники легко поймут, что эквивалент таких программных средств может также быть реализован в аппаратных средствах, микропрограммных средствах, микрокоде или их комбинациях друг с другом или с программными средствами. Принимая во внимание описанные в настоящем документе системы и способы, здесь не показаны, предполагаются или описаны программные средства, которые являются полезными для реализации любого варианта осуществления данного изобретения, являются традиционными и находятся в пределах возможностей обычного специалиста в данных областях техники.
На фиг. 1 показан пример наземной системы 8 вибросейсмических исследований, предназначенной для выполнения сейсмометрических работ в соответствии с некоторыми вариантами осуществления данного изобретения. Отметим, что описанные здесь варианты осуществления данного изобретения в равной мере применимы к наземным или морским вибрационным источникам упругих колебаний. Система 8 включает в себя множество сейсмических источников 10, один из которых изображен на фиг. 1. Сейсмический источник 10 может быть смонтирован на грузовом автомобиле 17 или другом устройстве, позволяющем осуществлять перемещение сейсмического источника 10. Система 8 включает в себя расположенные на поверхности геофоны, например, D1, D2, D3 и D4, и систему 14 сбора и накопления данных. В морской сейсморазведке сейсмический источник 10 может буксироваться позади судна, и гидрофоны, буксируемые на буксируемых косах, могут использоваться для D1, D2, D3 и D4 вместо геофонов. На протяжении настоящего технического описания термин «цель» относится к грунту, воде или другой монолитной массе, в которую сейсмический источник 10 излучает энергию. В показанном примере сейсмический источник 10 включает в себя сейсмический вибратор 96, включающий в себя вибрационный элемент 11 и опорную плиту 12.
Сейсмический вибратор 96 также включает в себя привод 97 (гидравлический или электромагнитный привод в качестве примеров), который приводит в движение вибрационный элемент 11 в ответ на управляющий сигнал (обозначенный как «DF(t)» на фиг. 1) для генерации сейсмических волн 15. Вибрационный элемент 11 присоединен к опорной плите 12, которая находится в контакте с поверхностью 16 земли, так чтобы энергия от вибрационного элемента 11 передавалась грунту для образования сейсмических волн 15.
Сейсмический вибратор 96 может включать в себя сенсорное устройство 13, имеющее датчики (например, акселерометры) для измерения перемещения опорной плиты 12. Сенсорное устройство 13 может быть смонтировано или прикреплено к опорной плите 12. Измеренное перемещение опорной плиты 12 может использоваться для определения толкающего усилия, как описано ниже.
В одном примере вибрационный элемент 11 содержит реакционную массу, которая совершает колебания с частотой и амплитудой, которая регулируется управляющим сигналом DF(t). Частота сигнала DF(t) задает частоту колебаний реакционной массы, а амплитуда колебаний в общем случае регулируется амплитудой сигнала DF(t). Сигнал DF(t) может представлять собой, например, синусоиду, амплитуда и частота которой изменяются во времени, так чтобы привод 95 генерировал вибросейсмический сигнал («свип-сигнал»), приводное действие, которое включает в себя множество частот в соответствующие моменты времени на протяжении свип-сигнала. Во время генерации свип-сигнала частота сигнала DF(t) может переходить (и, таким образом, частота колебаний реакционной массы может переходить) через диапазон частот, например, по одной частоте за каждый раз. Амплитуда сигнала DF(t) может быть линейно или нелинейно изменяющейся во время генерации свип-сигнала согласно спроектированной кривой амплитуда-время. Пример управляющего свип-сигнала обсуждается ниже со ссылкой на фиг. 3.
Граница раздела 18 между подземными импедансами Im1 и Im2 отражает сейсмические волны 15 в точках I1, I2, I3 и I4 для образования отраженных сейсмических волн 19, которые обнаруживаются геофонами D1, D2, D3 и D4 соответственно. Система 14 сбора данных собирает исходные сейсмические данные, полученные геофонами D1, D2, D3 и D4 соответственно. Исходные сейсмические данные могут быть обработаны для получения информации о подземных отражателях и физических свойствах подземных формаций.
Проиллюстрированная система использует источники и датчики на поверхности. В других вариантах осуществления данного изобретения сейсмические источники 10 и сейсмические датчики, такие как геофоны D0, D1, D2, D3 и D4, могут располагаться в буровой скважине («забое»), или они могут быть погружены непосредственно под поверхностью 16. Сейсмические датчики могут быть предназначены для регистрации измерений, обеспечиваемых энергией, которая вводится расположенными в скважине или зарытыми на небольшой глубине сейсмическими источниками 10 (например, сейсмическим вибратором 96).
Сейсмические данные, измеренные геофонами D1, D2, D3 и D4, представляют трансформации первоначальных сейсмических волн 15 от сейсмического источника 10, когда эти волны встречают подземные элементы, такие как граница Im1, Im2. Чтобы эффективно делать выводы о расположении и природе подземных объектов, предпочтительно знать характер сейсмических волн 15, а также отраженных сейсмических волн 19. Как отмечалось выше, характеристики грунта в сейсмическом источнике 10 могут не всегда соответствовать прогнозируемым характеристикам. По этой и другим причинам желательно определить данные контроля качества, представляющие энергию, введенную в грунт или другую цель. Данные контроля качества могут включать в себя один или несколько параметров контроля качества, например, величины разницы фаз или искажения.
На фиг. 2 показана блок-схема, иллюстрирующая пример способа для определения параметра контроля качества, соответствующего энергии, обеспеченной сейсмическим источником. Этапы могут выполняться в любом порядке, за исключением того, когда это конкретно указано иным образом, или когда данные из предыдущего этапа используются в последующем этапе. В различных примерах обработка начинается с этапа 210 или, как обсуждается ниже, с этапа 205. Для ясности объяснения ссылка здесь сделана на различные компоненты, показанные на фиг. 1 и 12, которые могут выполнять или участвовать в этапах этого примера способа. Следует отметить, однако, что могут использоваться другие компоненты, то есть, пример способа (способов), показанных на фиг. 2, не ограничены их выполнением определенными здесь компонентами. Кроме того, примеры этапов этого способа описаны ниже со ссылкой на фиг. 3-10.
В различных вариантах осуществления данного изобретения сейсмический источник включает в себя вибратор, например, вибрационный элемент 11 (фиг. 1) и связанные с ним компоненты. Способ, кроме того, включает в себя этап 205, выполняемый перед измерительным этапом 220. Любой из этапов 205 и 210 может выполняться перед другим этапом из указанных этапов.
На этапе 205 в различных вариантах осуществлении данного изобретения энергия, соответствующая управляющему сигналу, подается к цели (например, грунту или воде), используя сейсмический источник 10, например, опорную плиту 12, приводимую в движение вибрационным элементом 11 (см. фиг. 1). Этап 205 может предшествовать этапу 210 или следовать за этапом 210, или он может отсутствовать.
На этапе 210 определяют огибающую (кривую) управляющего сигнала, связанного с сейсмическим источником 10. Пример управляющего сигнала представлен как DF(t) на фиг. 1. Управляющий сигнал продолжается в течение выбранного временного интервала, и огибающая включает в себя величины, представляющие амплитуду управляющего сигнала в различные моменты времени в этом интервале, например, каждые 500 микросекунд. Управляющий сигнал может представлять собой, например, приводной сигнал для сейсмического вибратора 96 (фиг. 1). На фиг. 4, обсуждаемой ниже, показан пример огибающей управляющего сигнала. Огибающую можно определять, например, соединением локальных максимумов управляющего сигнала, кадрированием (обработкой методом окна) управляющего сигнала и выбором наибольшего значения в каждом окне или использованием других методов, известных в математической науке.
Огибающая может определяться автоматически, без ввода, осуществляемого конечным пользователем. Это может сделать процесс контроля качества, использующий нормализованные данные, как обсуждается ниже, прозрачным для конечного пользователя (например, оператора вибросейсмической установки). На протяжении данного технического описания огибающие сигналов обсуждаются со ссылкой на положительное (минимально отрицательное) прохождение управляющего сигнала. Однако отрицательные (минимально положительные) огибающие могут также использоваться.
На этапе 220 измеряется сигнал источника энергии, обеспечиваемой сейсмическим источником. Примером сигнала источника является сигнал толкающего усилия, как описано выше. Это измерение может выполняться непосредственно, используя данные от сенсорного устройства 13, или косвенно, используя данные от геофона D0 или одного или нескольких из геофонов D1, D2, D3 и D4. (см. фиг. 1).
В некоторых вариантах осуществления данного изобретения, использующих сейсмические вибраторы 96 (фиг. 1), сенсорное устройство 13 обеспечивает данные ускорения опорной плиты 12 (фиг. 1). Масса опорной плиты 12 известна, например, хранится в системе 1240 хранения данных (фиг. 12). В общем случае сила представляет собой произведение массы и ускорения. Толкающее усилие (например, направленная вниз сила) может быть определена, используя известную массу и измеренное ускорение, как средневзвешенная по массе сумма сил, обусловленных опорной плитой и реакционной массой. В частности, в этих вариантах осуществления данного изобретения измерительный этап 220 может включать в себя измерение ускорения сейсмического вибратора 96 в течение времени и оценку сигнала источника (например, сигнала толкающего усилия), используя измеренное ускорение. Толкающее усилие GF может вычисляться как:
GF = massRM × accRM + massBP × ассВР
для реакционной массы RM и опорной плиты BP.
В некоторых вариантах осуществления данного изобретения, использующих сейсмические вибраторы 96, оценочный этап 220 включает в себя измерительный этап 222. Сигнал источника (например, сигнал толкающего усилия) измеряется, используя датчик например, D0 (фиг. 1). D0 расположен около сейсмического источника 10 (например, имеющего сейсмический вибратор 96). Пунктирная стрелка на фиг. 1 обозначает толкающее усилие, действующее через опорную плиту 12, проходящее к датчику, подлежащее измерению. Это позволяет осуществлять измерение выходного толкающего усилия сейсмического вибратора 96 или выполнить его приблизительную оценку. Датчик может представлять собой, к примеру, расположенный на поверхности земли или в скважине геофон или гидрофон.
На этапе 230 управляющий сигнал и сигнал источника подвергают нормализации, используя определенную (измеренную) огибающую управляющего сигнала. Это может быть выполнено, например, путем деления управляющего сигнала на определенную огибающую сигнала и путем деления сигнала источника на определенную огибающую. Пример обсуждается ниже со ссылкой на фиг. 6 и 7.
На этапе 240 в процессоре 1286 (фиг. 12) параметр контроля качества определяют, используя нормализованный управляющий сигнал и нормализованный сигнал источника. Этап 240 может включать в себя этапы 242 и 244, обсуждаемые ниже. За этапом 240 может следовать этап 250.
На этапе 250 визуальное представление измеренного параметра контроля качества автоматически отображается на дисплее 1235 (фиг. 12), используя процессор 1266. Визуальное представление может представлять собой график отображения данных, такой как графики, показанные на фиг. 8-10, обсуждаемые ниже. Визуальное представление может осуществляться, например, с помощью пакета прикладных программ MATLAB.
На фиг. 3-10 показаны примеры данных контроля качества и их анализа, например, используя этапы, описанные выше со ссылкой на фиг. 2. Эти графики соответствуют примеру управляющего сигнала, включающему в себя свип-сигнал частотой 1-180 Гц в течение 30 сек. Свип-сигнал включает в себя участок с увеличивающейся амплитудой от 1 до 6 Гц и участок с уменьшающейся амплитудой от 100 Гц до 180 Гц.
На фиг. 3 приведен пример управляющего сигнала («свип-сигнала»). По оси абсцисс отложено время (в секундах), а по оси ординат отложена амплитуда (в произвольных единицах). Частота управляющего сигнала увеличивается со временем, начиная с очень низких частот, например, приблизительно 1 Гц до истечения 5 сек. Этап 206 (фиг. 2) может включать в себя подачу энергии к цели, соответствующей изображенному управляющему сигналу.
На фиг. 4 представлен график примера огибающей примера управляющего сигнала, показанного на фиг.3. По оси абсцисс отложено время (в секундах), а по оси ординат отложена амплитуда (в произвольных единицах). Огибающая по существу включает в себя положительные величины управляющего сигнала и отображает амплитуду управляющего сигнала, но не его частоту. Этап 210 (фиг. 2) может включать в себя определение огибающей.
На фиг. 5 приведен график примера рассчитанного или измеренного сигнала толкающего усилия. По оси абсцисс отложено время (в секундах), а по оси ординат отложена амплитуда (в произвольных единицах). Как можно видеть, сигнал толкающего усилия является аналогичным, но не идентичным управляющему сигналу, показанному на фиг. 3. Сигнал толкающего усилия или другой сигнал источника может отличаться от управляющего сигнала из-за изменений характеристик грунта, как обсуждалось выше, или из-за не идеальностей в сейсмическом источнике 10 (фиг. 1). Этап 220 может включать в себя выполнение оценки этого сигнала, либо этап 222 может включать в себя измерение этого сигнала (оба варианта показаны на фиг. 2).
На фиг. 6 приведен график примера нормализованного управляющего сигнала, вычисленного на основании примера управляющего сигнала, показанного на фиг. 3. На оси абсцисс отложено время (в секундах), а на оси ординат отложена амплитуда (в произвольных единицах). Каждая точка данных управляющего сигнала на фиг. 3 была разделена значением огибающей фиг. 4 в этот момент времени для обеспечения соответствующей точки данных нормализованного управляющего сигнала (фиг. 6). Как можно видеть, нормализованный сигнал имеет пиковую амплитуду, составляющую 1,0 (амплитуда от пика до пика равна 2,0) везде. Это происходит потому, что управляющий сигнал использовался для определения огибающей. Это будет часто иметь место, но некоторые методы для вычисления огибающей могут привести в результате к нормализованному управляющему сигналу, имеющему небольшие отклонения от ±1. В общем случае нормализованный управляющий сигнал имеет по существу постоянную амплитуду. Этап 230 (фиг. 2) может включать в себя генерацию этого нормализованного управляющего сигнала.
Фиг. 7 представляет собой график примера нормализованного сигнала толкающего усилия, вычисленного на основании примера сигнала толкающего усилия, показанного на фиг. 5, используя огибающую, показанную на фиг. 4. По оси абсцисс отложено время (в секундах), а по оси ординат отложена пиковая амплитуда (в произвольных единицах). Этап 230 (фиг. 2) может включать в себя генерацию этого нормализованного сигнала толкающего усилия. Как можно видеть, нормализованный сигнал толкающего усилия включает в себя относительно более высокие значения в низкочастотной части управляющего сигнала, менее чем приблизительно 12 сек, чем в более высокочастотной части управляющего сигнала. Нормализация сигнала толкающего усилия с помощью огибающей управляющего сигнала преимущественно более легко определять, как сигнал толкающее усилие соотносится с управляющим сигналом в зонах, в которых управляющий сигнал имеет низкую амплитуду.
Нормализованный сигнал толкающего усилия (фиг. 7) или другой сигнал источника может быть сгенерирован или обработан различными способами. В одном варианте осуществления данного изобретения нормализованный сигнал источника может быть сгенерирован для конкретных частотных диапазонов. В другом варианте осуществления данного изобретения нормализованный сигнал источника может быть обработан способом с использование окон.
В вариантах осуществления данного изобретения, где генерируется нормализованный сигнал толкающего усилия или сигнал источника для конкретных частотных диапазонов, управляющий сигнал связан с энергией на протяжении частотного диапазона. Обращаясь снова к фиг. 2 этап 240 определения величины может включать в себя этапы 242 и 244.
На этапе 242 выбираются соответствующие поднаборы данных, связанных с нормализованным управляющим сигналом и нормализованным сигналом источника. Каждый поднабор соответствует поддиапазону меньшего, чем полный частотный диапазон. В различных вариантах осуществления данного изобретения частотный диапазон включает в себя диапазон 1-150 Гц, а поддиапазон включает в себя диапазон 1-30 Гц и/или диапазон от 100 до 150 Гц.
На этапе 244 параметр контроля качества определяют, используя выбранные соответствующие поднаборы. За пределами этих поднаборов может использоваться ненормализованный анализ контроля качества.
В вариантах осуществления данного изобретения обработка нормализованного сигнала источника с помощью метода окон, этап 240 определения величины (фиг. 2) включает в себя определение соответствующих значений параметра контроля качества для каждого из множества окон нормализованного сигнала источника и нормализованного управляющего сигнала, причем окна характеризуются выбранной длиной окна. Выбранная длина окна может составлять, например, 0,5 сек, 1,0 сек, или по меньшей мере 1 сек или 2 сек или более 2 сек. В этих вариантах осуществления данного изобретения значения параметра контроля качества могут быть отложены на графике в функции времени для легкой визуализации и интерпретации полевым эксплуатационным персоналом, выполняющим сейсмическую разведку. Такие графики называются в настоящем документе «графиками контроля качества». Значения параметра контроля качества могут также автоматически обрабатываться, например, с помощью статистического анализа.
На фиг. 8 показан пример графика контроля качества, на котором параметр контроля качества представляет собой относительную амплитуду (отложенную вдоль оси ординат, в процентах) в зависимости от времени, отложенного вдоль оси абсцисс, в секундах основного частотного компонента (основной гармоники) нормализованного сигнала источника по отношению к основному частотному компоненту нормализованного управляющего сигнала. Предпочтительное толкающее усилие находится при амплитуде 100% управляющего сигнала вдоль всего свип-сигнала. Трасса 810 отображает нормализованный управляющий сигнал, который имеет по существу постоянную амплитуду, как отмечалось выше. Трасса 810 имеет максимумы при 70%, поскольку 70% представляют собой целевой уровень излучаемого (передаваемого) усилия в этом примере, не ограничивающим рамки изобретения. То есть, в этом примере управляющий сигнал предназначен для излучения максимум 70% усилия, которое способен излучать вибратор. Могут целевые значения излучаемого усилия могут также использоваться. Трассы 820 и 830 показывают сравнительные примеры параметров контроля качества для ненормализованных сигналов толкающего усилия. Трасса 820 соответствует длине окна, составляющей 0,5 сек, а трасса 830 соответствует длине окна, составляющей 1 сек. Для сравнения, трасса 840 показывает ненормализованный управляющий сигнал. Как можно видеть, в частности до момента времени приблизительно 8 сек может быть трудно для полевого эксплуатационного персонала визуально анализировать величины разницы между ненормализованным управляющим сигналом (трасса 840) и ненормализованными измеренными данными (трассы 829, 830).
Трасса 850 показывает нормализованные данные толкающего усилия с длиной окна, составляющей 1 сек. Сравнивая трассы 850 и 810, промысловый эксплуатационный персонал может легко определить то, что толкающее усилие было больше, чем намеченное, в течение приблизительно первых 12 сек свип-сигнала и меньше, чем намеченное, в течение приблизительно последних 10 сек свип-сигнала. Использование нормализованных данных толкающего усилия преимущественно обеспечивает для полевого эксплуатационного персонала легче воспринимаемую информацию о качестве энергии сейсмического источника (сейсмические волны 15, фиг. 1). Кривая 850 обеспечивает информацию контроля качества во всем диапазоне частот в свип-сигнале, включая информацию в течение низкочастотных участков возрастания частоты (<12 сек) и высокочастотных участков снижения частоты (> ~ 17 сек).
На фиг. 9 показан пример графика контроля качества, в котором параметр контроля качества представляет собой разность фаз (отложенную по оси ординат, выраженную в градусах) в функции времени (отложенного по оси абсцисс, выраженного в секундах) между нормализованным управляющим сигналом и нормализованным сигналом толкающего усилия. Идеальная фаза составляет 0 градусов вдоль всей протяженности свип-сигнала. Трасса 920 показывает ненормализованные данные с длиной окна 0,5 сек. Как можно видеть, эта трасса является очень зашумленной помехами в зоне низких частот (вплоть до приблизительно 10 сек в этом свип-сигнале). Полевому эксплуатационному персоналу может быть затруднительно определять, возникают ли эти помехи в результате измерений, ошибки вычислений или, например, свойствами грунта, который необходимо исследовать, и, таким образом, следует ли предпринять корректирующие действия в ответ на эти помехи. Трасса 930 показывает ненормализованные данные с длиной окна, составляющей 1 сек. Помехи еще в большей степени снижаются по сравнению с трассой 930.
На фиг. 10 показан пример графика контроля качества, в котором параметр контроля качества представляет собой искажение (откладываемое по оси ординат, измеряемое в процентах) в зависимости от времени (откладываемого по оси абсцисс в секундах, указывающее величины разницы между нормализованным управляющим сигналом и нормализованным сигналом толкающего усилия. Идеальное искажение составляет 0% вдоль полной протяженности свип-сигнала. Трасса 1020 соответствует ненормализованным данным и длине окна, составляющей 1 сек, а трасса 1040 соответствует нормализованным данным и длине окна, составляющей 1 сек. Как и на фиг.9, помехи или ошибка вычислений снижается от трассы 1020 к трассе 1030 и еще больше снижается от трассы 1030 к трассе 1040. Нормализации данных преимущественно обеспечивает сниженные помехи и результаты, которые легче поддаются сравнению.
В таблице 1 приведены данные (выраженные в произвольных единицах) для средней и пиковой амплитуды основной гармоники (фиг. 8), фазы (фиг. 9) и искажения (фиг. 10). Также показаны сравнительные значения для ненормализованного процесса контроля качества. Как показывает таблица 1, средние и пиковые величины являются более близкими друг к другу для нормализованного (соответствующего изобретательскому уровню) контроля качества, чем для сравнительного контроля качества. Это свидетельствует о том, что использование нормализованных данных снижает помехи или погрешности вычислений. Уменьшенные помехи или погрешность позволяют полевому эксплуатационному персоналу более легко определять то, следует ли предпринимать корректирующие действия в ответ на данные контроля качества.

Фиг. 11 показывает еще один пример графика контроля качества, в котором параметр контроля качества представляет собой разность амплитуд. Этот график не соответствует управляющему сигналу, изображенному на фиг. 3-10. Трасса 1110 представляет нормализованный управляющий сигнал, который имеет по существу постоянную амплитуду, как отмечалось выше. В этом не ограничивающем рамки изобретения примере 80% представляет собой целевой уровень привода. Трасса 1130 показывает сравнительный пример параметров контроля качества, в частности относительных амплитуд частоты основной гармоники толкающего усилия для ненормализованного сигнала толкающего усилия. Для сравнения, трасса 1140 показывает ненормализованный управляющий сигнал. Как можно видеть, в частности между приблизительно 2 сек и приблизительно 6 сек может быть затруднительно для персонала, выполняющего геологоразведку, визуально анализировать различия между ненормализованным управляющим сигналом (трасса 1140) и ненормализованными измеренными данными (трасса 1130).
Трасса 1150 показывает нормализованные данные толкающего усилия. Сравнивая трассы 1150 и 110, полевой эксплуатационный персонал может легко определять, что толкающее усилие было выше, чем запланированное, в течение периода между приблизительно 4 сек и приблизительно 6 сек, и меньше, чем запланированное, в течение других участков свип-сигнала.
На фиг. 12 приведена схема высокого уровня, показывающая компоненты управляющего механизма, предназначенного для реализации способа для определения параметра контроля качества, соответствующего энергии, обеспечиваемой сейсмическим источником, и для выполнения других функций, описанных в настоящем документе, и связанные с ним компоненты. Эта система включает в себя процессор 1286, периферийную систему 1220, систему 1230 интерфейса пользователя и систему 1240 хранения данных. Периферийная система 1220, система 1230 пользовательского интерфейса и система 1240 хранения данных коммуникационно присоединены (проводным или беспроводным образом) к процессору 1286. Процессор 1286 может быть коммуникационно присоединен к сети 1250 (показанной штриховой линией), например, интернету, как обсуждается ниже. Каждое из устройств 10, 11, 13 и 96 (все показаны на фиг. 1) может включать в себя одну или большее число систем 1286, 1220, 1230, 1240 и каждое может присоединяться к одной или нескольким сетям 1250. Процессор 1286 и каждое из других процессорных устройств, описанных в настоящем документе, может включать в себя один или несколько микропроцессоров, микроконтроллеров, программируемых пользователем вентильных матриц (FPGA), заказных специализированных интегральных микросхем (ASIC), программируемых логических устройств (PLD), программируемых логических матриц (PLA), программируемых матричных логических устройств (PAL) или цифровых сигнальных процессоров (DSP). Процессор 1286 может реализовывать процессы разнообразных вариантов осуществления данного изобретения, описанных в настоящем документе. Подсистемы, такие как периферийная система 1220, система 1230 интерфейса пользователя и система 1240 хранения данных показаны отделенными от процессора 1286, но они могут храниться полностью или частично внутри процессора 1286.
Система 1240 хранения данных может включать в себя или быть коммуникационно соединенной с одним или несколькими запоминающими устройствами, доступными для процессора, предназначенными для хранения информации в различных вариантах осуществления данного изобретения, система 1240 хранения данных включает в себя запоминающее устройство, содержащее данные управляющего сигнала, связанного с сейсмическим источником. Доступные для процессора запоминающие устройства могут располагаться, например, внутри шасси или как части распределенной системы. Примеры доступных для процессора запоминающих устройств включают в себя, но не ограничиваются ими, следующие: регистры, гибкие диски, жесткие диски, магнитные диски, штрих-коды, компакт-диски, видеодиски (DVD), постоянные запоминающие устройства, стираемые программируемые постоянные запоминающие устройства (EPROM, EEPROM или Flash) и оперативные запоминающие устройства (RAM).
В одном примере система 1240 хранения данных включает в себя запоминающее устройство 1241 для программного кода, например, ОЗУ и диск 1243, например, энергонезависимая считываемое компьютером вращающееся запоминающее устройство, такое как жесткий диск. Команды компьютерной программы считываются в память 1241 программного кода из диска 1243. Процессор 1286 затем выполняет одну или несколько последовательностей команд компьютерной программы, загруженных в память 1241 программного кода в результате выполнения этапов процесса, описанного в настоящем документе. Таким путем процессор 1286 выполняет процесс, реализуемый компьютером. К примеру, этапы способов, описанных здесь, блоки иллюстраций блок-схемы (например, фиг. 2) или блок-схемы, приведенные в настоящем документе, и их комбинации могут быть реализованы командами компьютерной программы. Память 1241 программного кода может также сохранять данные в некоторых вариантах осуществления данного изобретения.
Говоря конкретно, в различных вариантах осуществления данного изобретения процессор 1286 предназначен для определения огибающей управляющего сигнала используя сохраненные данные из запоминающего устройства в системе 1240 хранения данных (например, согласно этапу 210, фиг. 2), измерения сигнала толкающего усилия или другого сигнала источника энергии, обеспечиваемой сейсмическим источником (например, согласно этапу 220, фиг. 2), нормализации управляющего сигнала и сигнала источника, используя определенную огибающую (например, согласно этапу 230, фиг. 2) и определения параметра контроля качества, используя нормализованный управляющий сигнал и нормализованный сигнал источника (например, согласно этапу 240, фиг. 2). Управляющий механизм может также включать в себя сейсмический источник 10, имеющий сейсмический вибратор 96 (оба изображены на фиг. 1). Процессор 1286 может предназначаться для того, чтобы заставлять сейсмический источник 10 подавать энергию, соответствующую сохраненным данным управляющего сигнала, к цели, например, к земной поверхности 16, или к океанической воде, например, путем подачи управляющего сигнала DF (t) посредством периферийной системы 1220.
Периферийная система 1220 может включать в себя одно или несколько устройств, предназначенных для подачи данных к процессору 1286. К примеру, периферийная система 1220 может принимать данные от сенсорного устройства 13 или геофонов D0, D1, D2, D3 или D4. Процессор 1286 после приема данных от устройства или коммуникационно присоединенной к периферийной системе 1220 может сохранять такие данные в системе 1240 хранения данных. В различных вариантах осуществления данного изобретения система управления включает в себя сенсорное устройство 13, предназначенное для измерения сейсмического вибратора 96 или цели. Процессор 1286 может предназначаться для приема данных от сенсорного устройства 13 и выполнения оценки сигнала источника, используя полученные данные.
Как отмечалось выше, в различных вариантах осуществления данного изобретения сейсмический вибратор 96 включает в себя опорную плиту 12, предназначенную для передачи энергии к цели, а сенсорное устройство 13 включает в себя акселерометр, смонтированный к опорной плите 12 и предназначенный для обеспечения данных ускорения опорной плиты 12. В различных вариантах осуществления данного изобретения сенсорное устройство D0 расположено на некотором расстоянии от сейсмического вибратора 96 и вблизи его и предназначено для измерения сил, приложенных к цели сейсмическим вибратором 96. Сенсорное устройство D0 может включать в себя, например, геофон или гидрофон в зависимости от того, является ли сейсмический источник морским источником или наземным источником.
Система 1230 интерфейса пользователя может включать в себя «мышку», клавиатуру, другой компьютер (присоединенный например, с помощью сети или безмодемного кабеля) или любое устройство или комбинацию устройств, из которых данные вводятся в процессор 1286. Система 1230 интерфейса пользователя может также включать в себя дисплей 1235, запоминающее устройство, в которое имеет доступ процессор, или любое устройство или комбинацию устройств, в которые данные выводятся процессором 1286. Система 1230 интерфейса пользователя и система 1240 хранения данных могут совместно использовать запоминающее устройство, доступное для процессора. В различных вариантах осуществления данного изобретения процессор 1286, кроме того, предназначен для предоставления визуального отображения определенного параметра контроля качества, например, графика контроля качества, на дисплее 1235.
В различных вариантах осуществления данного изобретения процессор 1286 присоединен к сети 1250 через коммуникационный (связной) интерфейс 1215 (оба показаны пунктирной линией). К примеру, коммуникационный интерфейс 1215 может включать в себя терминальный адаптер цифровой сети с интеграцией услуг сети (ISDN) или модем для передачи данных посредством телефонной линии; сетевой интерфейс для передачи данных посредством локальной вычислительной сети (LAN), например, сети Ethernet LAN или глобальной компьютерной сети (WAN); или радиопередатчик для передачи данных посредством беспроводного канала связи, например, WIFI или GSM. Коммуникационный интерфейс 1215 отправляет и принимает электрические, электромагнитные или оптические сигналы, которые содержат потоки цифровых или аналоговых данных, представляющих различные типы информации, в сеть 1250 и из сети 1250. Коммуникационный интерфейс 1215 может быть присоединен к сети 1250 с помощью переключающего устройства, межсетевого интерфейса (шлюза), концентратора, маршрутизатора или другого сетевого устройства.
Процессор 1286 может отправлять сообщения и принимать данные, включая программный код, через сеть 1250 и коммуникационный интерфейс 1215. К примеру, сервер (не показан) может хранить запрашиваемый программный код для прикладной программы, (например утилиту JAVA) на материальной энергонезависимой запоминающей среде, считываемой компьютером, к которому присоединен сервер. Сервер может извлекать код из этой среды и передавать его через сеть 1250 к коммуникационному интерфейсу 1215. Принятый программный код может быть выполнен процессором 1286 сразу после получения, или сохранен в системе 1240 хранения данных для его исполнения на более поздней стадии.
Различные варианты данного изобретения, описанные здесь, включают в себя продукты (изделия) компьютерной программы, содержащие команды компьютерной программы, сохраненные на машиночитаемом носителе, например, на диске 1243. Такой носитель может быть изготовлен традиционно для таких изделий, например, путем прессования компакт-диска (CD-ROM) или записи отображения диска на жесткий диск. Когда сохраненные команды исполняются процессором 1286, эти команды заставляют процессор 1286 выполнять функции, действия или операционные этапы различных вариантов осуществления данного изобретения, описанных здесь. Сохраненные команды могут выполняться, например, на процессоре 1286, частично на процессоре 1286 и частично на удаленном компьютере (не показан), присоединенном к сети 1250, или полностью на удаленном компьютере.
В одном примере сохраненные команды заставляют процессор 1286 реализовать способ определения параметра контроля качества, соответствующего энергии, обеспеченной сейсмическим источником. Этот способ содержит определение огибающей управляющего сигнала связанного с сейсмическим источником (например, согласно этапу 220, фиг. 2); измерение сигнала толкающего усилия или другого сигнала источника энергии, обеспеченной сейсмическим источником (например, согласно этапу 220, фиг. 2); нормализацию управляющего сигнала и сигнала источника, используя определенную огибающую (например, согласно этапу 230, фиг. 2); и определение параметра контроля качества, используя нормализованный управляющий сигнал и нормализованный сигнал источника (например, согласно этапу 240, фиг. 2).
В различных вариантах осуществления данного изобретения машиночитаемый носитель дополнительно включает в себя сохраненные данные, представляющие выбранную длину окна. Этап определения величины данного способа включает в себя определение значений данных параметров контроля качества для каждого из множества окон нормализованного сигнала источника и нормализованного управляющего сигнала, причем эти окна характеризуются выбранной длиной окна. Это обсуждается выше со ссылкой на этап 240 (фиг. 2). Выбранная длина окна может составлять по меньшей мере 1 секунду. Кроме того этот способ может дополнительно содержать автоматическое предоставление визуального отображения определенного параметра контроля качеств на дисплее 1235, используя процессор 1286 (например, согласно этапу 250, фиг. 2).
Раскрытые примеры вариантов осуществления данного изобретения обеспечивают способы обработки данных контроля качества. Следует понимать, что настоящее описание не призвано ограничить данное изобретение. С другой стороны примеры вариантов осуществления данного изобретения имеют целью охватить альтернативы, модификации и эквиваленты, которые включены в суть и объем данного изобретения. Кроме того в подробном описании иллюстративных вариантов осуществления данного изобретения описаны многочисленные специфические детали для того, чтобы обеспечить глубокое понимание заявленного изобретения. Однако специалист в данной области техники поймет, что различные варианты осуществления данного изобретения могут быть реализованы на практике без таких специфических деталей.
Хотя характерные особенности и элементы представленных здесь иллюстративных вариантов осуществления данного изобретения описаны в вариантах осуществления изобретения в конкретных комбинациях, каждая характерная особенность или элемент может использоваться индивидуально без других особенностей и элементов вариантов осуществления изобретения или в различных комбинациях с другими особенностями и элементами, раскрытыми здесь, или без других особенностей и элементов.
В настоящем техническом описании использованы примеры предмета изобретения, раскрытые чтобы позволить любому специалисту в данной области техники реализовать его на практике, включая изготовление и использование любых устройств или систем и выполнение любых включенных в него способов.
Реферат
Изобретение относится к области геофизики и может быть использовано в процессе обработки данных контроля качества в отношении энергии, излучаемой сейсмическим источником. Предложен способ определения параметра контроля качества, соответствующего энергии, обеспечиваемой сейсмическим источником и связанными с ним устройствами. Способ включает в себя определение огибающей управляющего сигнала, связанного с сейсмическим источником; измерение сигнала источника при указанной энергии, обеспечиваемой сейсмическим источником; нормализацию управляющего сигнала и сигнала источника, используя полученную огибающую, и определение в процессоре параметра контроля качества, используя нормализованный управляющий сигнал и нормализованный сигнал источника. Управляющий механизм для реализации способа включает в себя запоминающее устройство, хранящее данные управляющего сигнала, связанного с сейсмическим источником; и процессор, связанный с запоминающим устройством и выполненный с возможностью осуществления этапов указанного способа. Также в изобретении предложен машиночитаемый носитель, содержащий команды для выполнения этапов способа. Технический результат – повышение точности получаемых данных. 3 н. и 17 з.п. ф-лы, 12 ил., 1 табл.
Комментарии