Способ измерения плотности квазиоднородного пучка излучаемых частиц, зарегистрированных плоским твердотельным детектором - RU2776093C1
Код документа: RU2776093C1
Чертежи
Описание
Область техники, к которой относится изобретение
Изобретение относится к области физики элементарных частиц, в частности к прецизионным измерительным системам параметров пучка излучаемых частиц, технологию измерений которых составляют технологии машинного зрения, и может быть использовано на практике, например, в области радиобиологической медицины, где широкое применение имеют пучки однородного излучения, а также в тех областях науки и техники, где используются трековые детекторы, например, в области спектрометрии элементарных частиц.
Предшествующий уровень техники
Метод определения количества электронов напрямую, в зависимости от количества их следов (треков), был известен уже в пятидесятые-шестидесятые годы прошлого столетия, когда стали использовать густые фотографические эмульсии [1, 2], позже ядерные эмульсии, которые используются как твердотельные трековые детекторы в настоящее время.
Анализ путем поштучного счета следов в трековых детекторах, производящийся на визуальных оптических или оптико-механических микроскопах вручную, является весьма трудоемкой процедурой, требующей больших временных затрат.
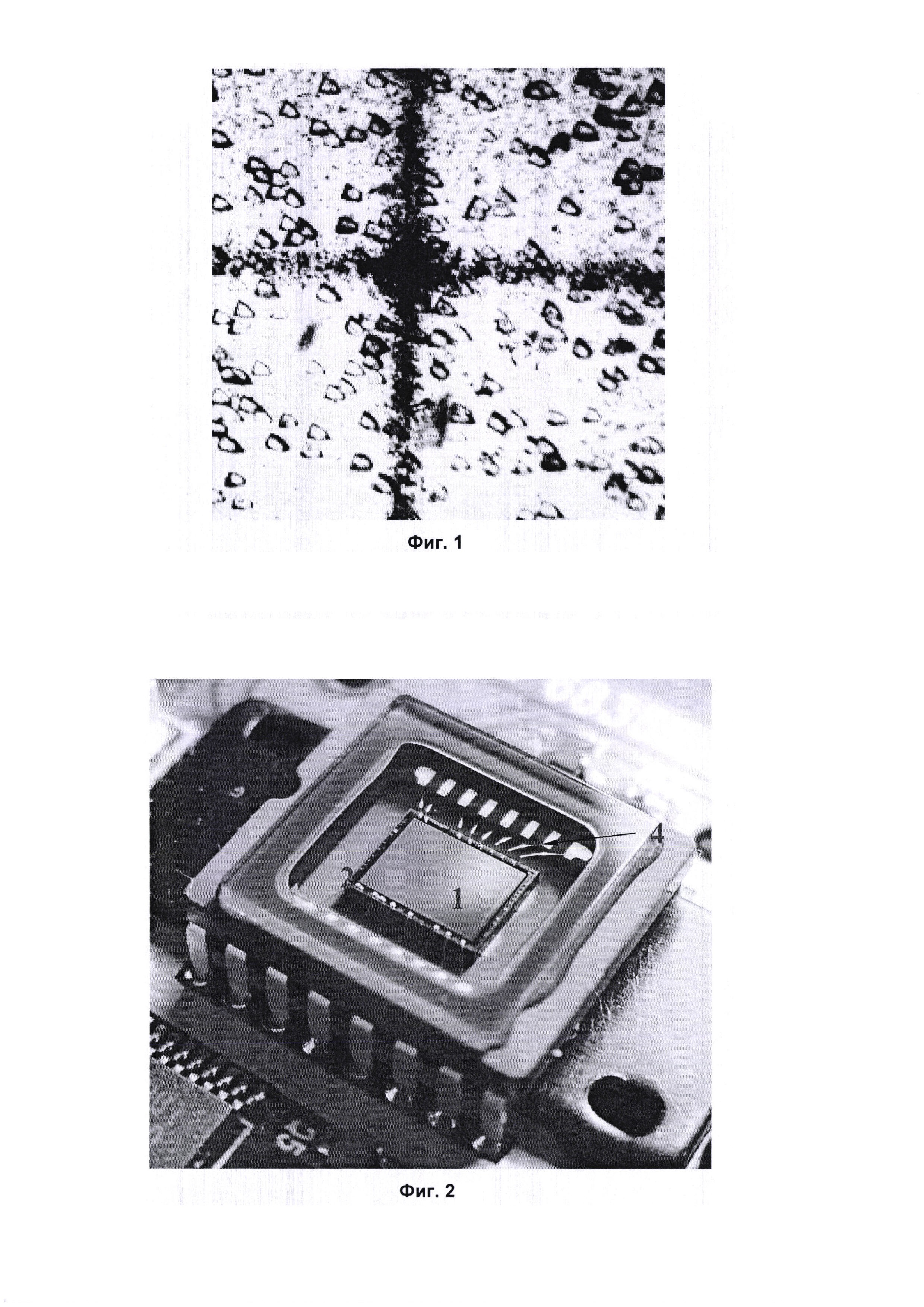
При подсчете количества частиц в поперечном сечении пучка излучения методом ручного поштучного счета следов частиц, зарегистрированных в плоскости твердотельного детектора (слюда, ядерная фотоэмульсия и др.) с помощью визуального оптического или оптико-механического микроскопа типа МБИ-2, сканирующего плоскость детектора, необходимо применять координатную разметку либо в плоскости детектора, либо сетку в окуляре микроскопа. Пример такой сетки приведен на фиг. 1 [1]. В отличие от следов частиц косого или скользящего облучения, имеющих в плоскости детектора отличную от нуля протяженность, и, называемых треками, в случае перпендикулярного, нормального облучения плоскости детектора следы частиц с нулевой протяженностью, будучи частным случаем треков, далее называются просто следами.
Из представленного на фиг. 1 видно, что координатные линии разметки местами скрывают изображения следов частиц, что отрицательно влияет на получение достоверных количественных данных при сканировании детектора. Наличие координатной сетки является также неустранимой помехой для автоматизации процесса измерения, исключающей саму возможность автоматизации.
Помимо этого, счет следов частиц через окуляр микроскопа требует стабильного положения глаза оператора относительно окуляра, чтобы избежать смещения отсчитываемого следа частицы в массиве частиц поля зрения микроскопа, что является весьма трудоемкой процедурой, требующей постоянного напряжения, приводящего к быстрой утомляемости глаз, и, как следствие, к частому отдыху или смене операторов.
Обозначенные выше проблемы отрицательно влияют как на точность результатов счета при сканировании следов частиц в плоскости детектора (ошибки измерений достигают (8÷10)%), так и на скорость поштучного ручного счета, а также на возможность автоматизации самого процесса счета частиц.
С развитием технологий машинного зрения [3], принципиально изменивших подход к обработке треков частиц в твердотельных детекторах, появились измерительные микроскопы и комплексы, на которых измерительный процесс либо полностью автоматизирован [4, 5], либо полуавтоматизирован [6, 7], что позволило существенно облегчить изнуряющий труд операторов, выполняющих поштучный счет треков ручным способом, а также повысить точность и скорость обработки следов частиц [7, 4, 5].
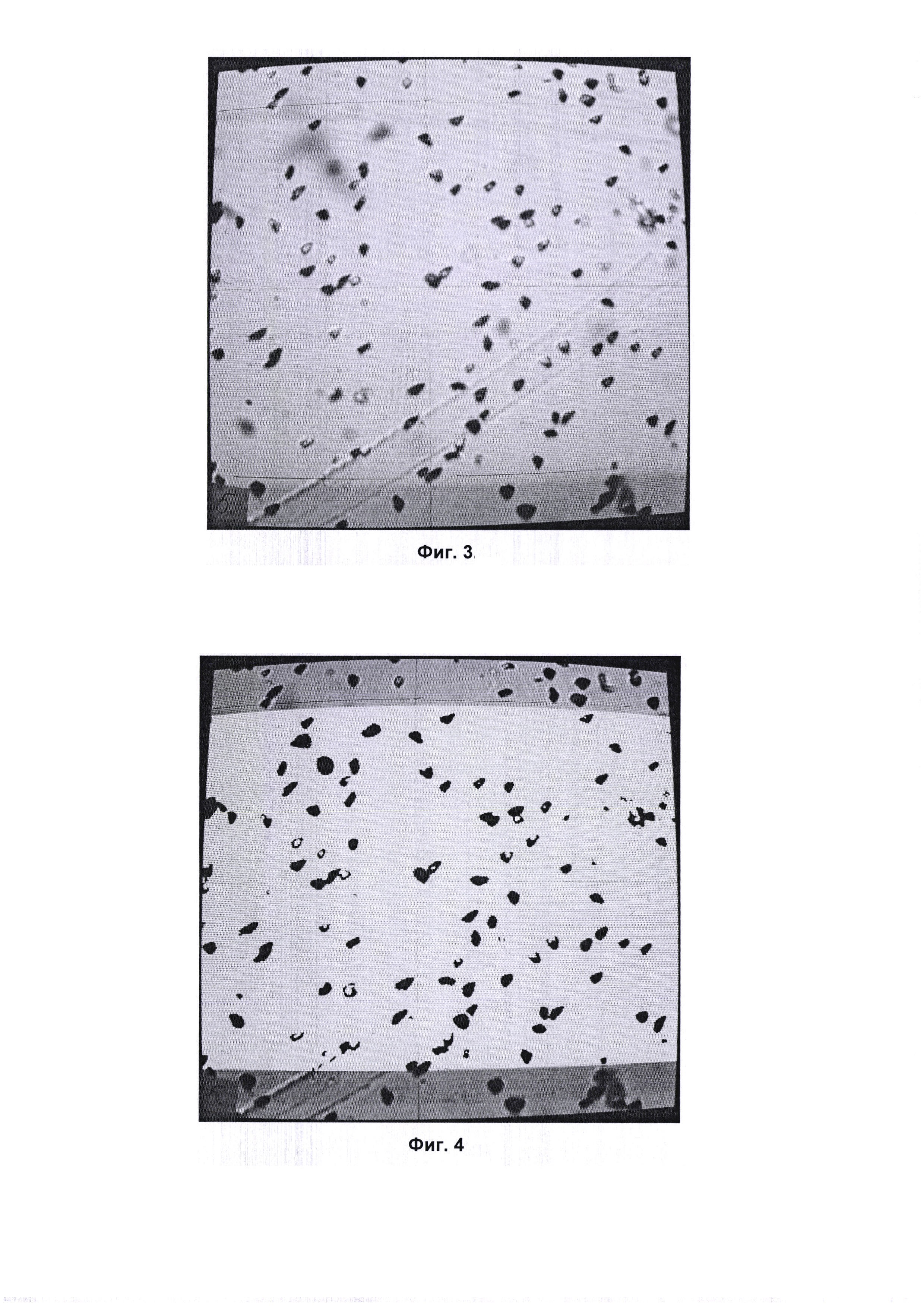
Согласно технологиям машинного зрения, подсчитываются не сами измеряемые объекты (следы на зарегистрировавшем их детекторе), а их оптические изображения, проецируемые оптическим объективом микроскопа на плоскость матрицы пикселей (ПЗС-матрицы) [8], являющейся оптико-электронным преобразователем, изготовленным на основе прибора с зарядовой связью (ПЗС). ПЗС-матрица представляет собой двумерный массив светочувствительных полупроводниковых ячеек (пикселей) размером от 5 до 20 мкм, отделенный слоем диэлектрика от подложки из поликристаллического кремния (фиг. 2). К ячейкам с помощью электродов приложено напряжение от внешнего источника, формирующее электрическое поле ПЗС-матрицы.
В диагностике пучков частиц ПЗС-матрица, как светочувствительный элемент телевизионной ПЗС-камеры, используется для получения двумерного изображения распределения плотности пучка в его поперечном сечении [8].
В настоящее время технологии машинного зрения используются более широко, в частности, для обработки изображений треков частиц, зарегистрированных в твердотельных детекторах в экспериментах в области физики элементарных частиц [7, 4]. Автоматические и полуавтоматические измерительные установки содержат при этом функционально схожие основные узлы, такие как оптико-электронная система, укомплектованная телевизионной ПЗС-камерой со светочувствительным элементом из ПЗС-матрицы, компьютером с контроллером, предназначенным для оцифровки изображений с ПЗС-матрицы телевизионной ПЗС-камеры [7, 4, 5], ввода оцифрованных изображений в ЭВМ и обработки полученных данных.
Наличие таких узлов позволяет решать задачи получения количественных результатов измерений автоматическим или полуавтоматическим путем, что решает проблемы точности и скорости обработки больших массивов экспериментальных данных.
В ближайшем аналоге [5] измерение плотности пучка ускоренных ионов производилось с помощью автоматического поштучного поиска вытравленных микропор - следов ионов в пластинках пластика, облученных ионами. Обработка следов производилась по технологии «машинного зрения» при работе ПЗС-матрицы в «сером» режиме, при котором в каждом пикселе изображения при оцифровке в контроллере отражается величина яркости (почернения) той микрообласти изображения, которая совпадает с соответствующим ей пикселем.
Как отмечается в ближайшем аналоге [5, стр. 109] при одинаковых диаметрах микропор их видимое почернение зависит от глубины лунки протравленной микропоры. Это обстоятельство приводит к ошибкам в исследовании распределения плотности частиц по энергиям, как в однородных, так и в неоднородных пучках, что является недостатком методики, предлагаемой в работе [5].
Для решения этой проблемы авторы работы [5] отмечают возможные дополнительные процедуры по длительному травлению лунок до сквозного состояния. Однако, в вышеупомянутой работе эти дополнительные процедуры не рассматриваются.
Техническая задача настоящего изобретения состоит в устранении указанной проблемы без использования технологически сложных и затратных приемов.
Раскрытие изобретения
Авторы настоящего изобретения установили, что для получения достоверных результатов измерения плотности пучка частиц с помощью поштучного компьютерного анализа достаточно перейти от измерений почернений микропоры от частицы к числу пикселей в изображении микропоры в рамках прямых измерений изображений следов частиц в плоскости толстослойного образца детектора.
Такие измерения могут быть проведены с высокой точностью (ошибка измерения составляет (0÷2)%), если технологию «машинного зрения» применить в том варианте, в котором она применена в предложенном в настоящей заявке интегральном способе счета частиц излучения, т.е. если измерения следов ионов, например, ионов12С производить при работе ПЗС-камеры не в сером режиме, а в пороговом режиме, который исключит влияние глубины лунки на почернение изображения микропоры от частицы, и количество пикселей в одном следе частицы будет определяться только величиной поперечного сечения микропоры.
Технический результат состоит в возможности проведения исследований распределений излучаемых частиц по поперечному сечению в квазиоднородных пучках излучения с высокой достоверностью порядка (98÷100)%, а также в значительном упрощении процедуры измерения плотности частиц в таких пучках и снижении затрат на проведение измерений.
Для измерения распределения плотности пучка излучаемых частиц, зарегистрированных твердотельным детектором в поперечном сечении пучка квазиоднородного излучения, предложен интегральный способ счета частиц, в основе реализации которого лежит использование технологии машинного зрения.
Изображение следов в кадре ПЗС-камеры может быть двух различных видов: «серое» и «пороговое». «Серое» - это основное изображение, каждый пиксель ПЗС-матрицы которого имеет уровень почернения, определяемый почернением области изображения, с которой пиксель совмещен, измеряемый количеством градаций уровня серого, и оцифровывается целым числом в интервале от 0 до 255 единиц, соответствующим 256 градациям уровней серого, заложенным в контроллер. «Пороговое» изображение, являющееся производным от «серого», в котором все пиксели «серого» изображения с уровнями почернений меньшими уровня почернения Р порога исключаются из порогового изображения и приобретают уровень почернения со значением 0 (ноль), а все пиксели с уровнями почернения большими или равными Р приобретают уровень почернения порога со значением Р.
Виды оцифровки изображения закладываются в контроллер разработчиком НПК «ВИДЕОСКАН» и определяются одним из типов прошивки, которые поставляются пользователю вместе с описанием контроллера.
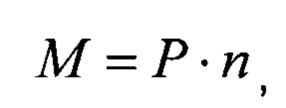
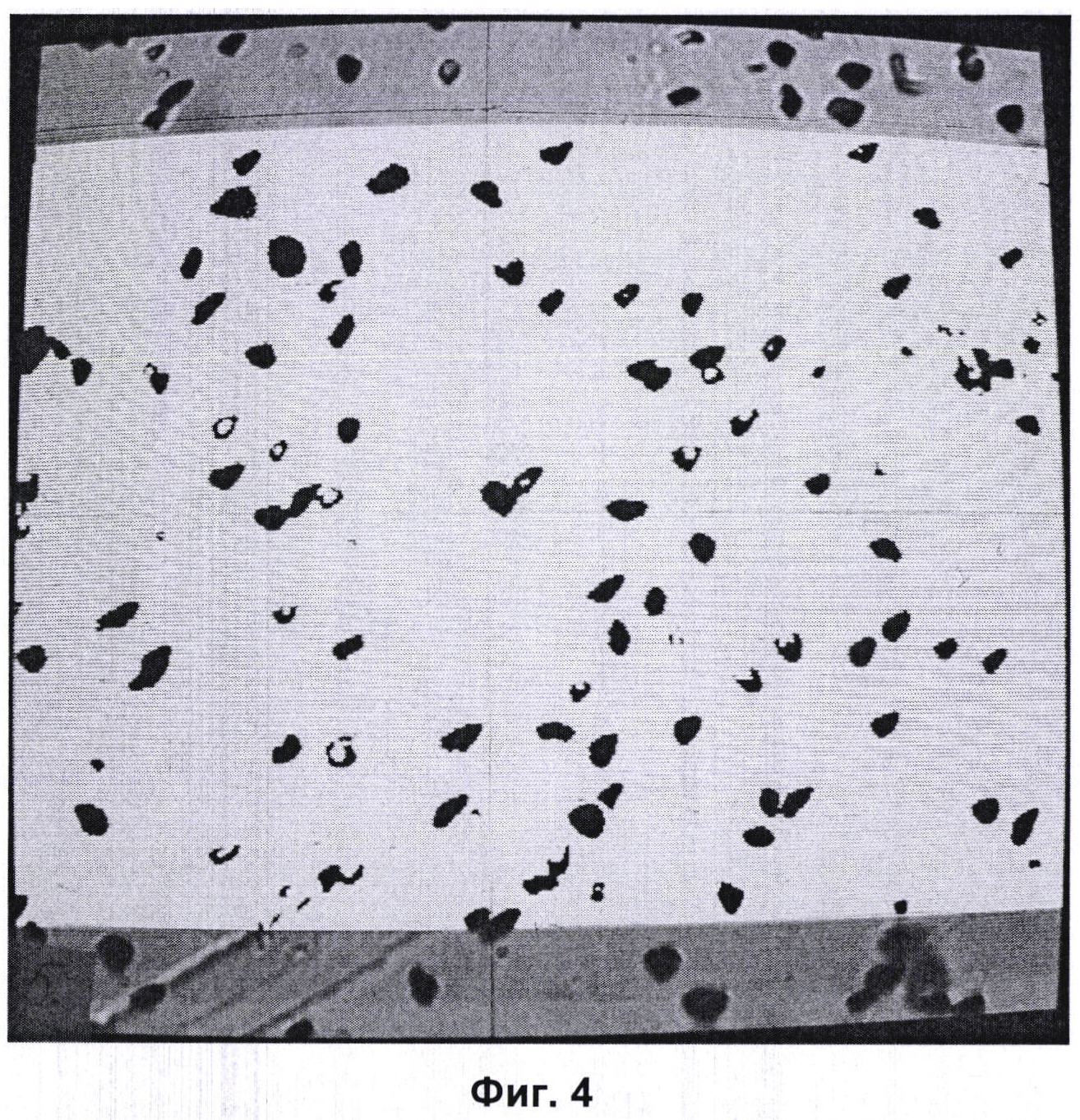
Оцифрованный в контроллере сигнал, как в «сером» (фиг. 3), так и в «пороговом» (фиг. 4) изображении, передается параллельно на видеопросмотровое устройство (монитор), а его данные (0, Р) заносятся в память компьютера.
Изображение части плоскости детектора, проектируемое оптическим объективом микроскопа на светочувствительную поверхность ПЗС-матрицы, занимает прямоугольную область [ΔХ×ΔУ], содержащую фиксированное количество пикселей (например, (512×512) или (1024×1024) шт. и др.), образующих область кадра ПЗС-камеры. При сканировании плоскости детектора, рамки кадра перемещаются по осям 0Х и 0Y прямоугольной системы координат микроскопа на расстояния ΔХ или ΔY, равные размерам рамки кадра, с точностью до ±1 мкм, обеспечиваемой безынерционными приводами и отсчетными устройствами линейных перемещений кареток X и У полуавтоматического микроскопа МАС-1 (ИТЭФ) [6]. При этом не требуется никаких дополнительных разметок, т.к. расстояния, пройденные кадром относительно плоскости детектора, при каждом перемещении на один очередной кадр отсчитываются ЭВМ и выводятся на экран отдельного монитора для контроля оператором с точностью ±1 мкм.
Технический результат достигается за счет осуществления раскрытого в настоящей заявке способа измерения плотности пучка излучаемых частиц, зарегистрированных плоским твердотельным детектором, основанный на обработке изображений с использованием автоматизированного измерительного микроскопа, оснащенного компьютерной видеосистемой с телевизионной ПЗС-камерой, обработка кадров которой осуществляется с применением технологии машинного зрения, в котором плотность пучка измеряют путем интегрального счета числа следов частиц в изображении каждого из кадров ПЗС-камеры, зарегистрированных твердотельным детектором в поперечном сечении пучка квазиоднородного излучения, с использованием ЭВМ, где измерения проводят в пороговом изображении кадра ПЗС-камеры в сочетании с использованием численного значения порога, обеспечивающего высокоточные измерения.
Предложенный способ основан на обработке изображений следов частиц квазиоднородного излучения, оставленных при облучении в твердотельном детекторе, проектируемых на поверхность ПЗС-матрицы телевизионной ПЗС-камеры в их пороговом черно-белом исполнении, и на использовании численного значения Р порога, что позволяет с первых же этапов осуществления алгоритма способа измерить количество черного в кадре и определить количество черных пикселей, принадлежащих суммарному количеству следов частиц в кадре. Это открывает и сокращает путь для интегрального счета следов частиц в кадре, позволяющего значительно упростить процедуру измерения плотности частиц в поперечном сечении пучка излучения по сравнению, например, с поштучным ручным счетом следов частиц или с поштучным автоматизированным способом измерения плотности пучка ускоренных ионов12С, где для каждого следа частицы в отдельности делается поштучный счет черных пикселей, составляющих обмеряемый след, требующий высокоразрешающей (не менее (1024×1024) пикселей в матрице) ПЗС-камеры и мощного, дорогостоящего компьютера [5].
Способ измерения плотности квазиоднородного пучка излучаемых частиц, зарегистрированных плоским твердотельным детектором, основан на использованием технологии машинного зрения, реализуемой на автоматизированном измерительном микроскопе, оснащенном компьютерной видеосистемой с телевизионной ПЗС-камерой, обрабатывающей изображения.
Интегральный способ счета числа следов частиц излучения в кадре ПЗС-камеры производится в пороговом исполнении изображений следов частиц на автоматизированном измерительном микроскопе.
Могут быть использованы автоматизированные измерительные микроскопы разных конструкций, подходящие для исследования параметров пучков излучаемых частиц, зарегистрированных плоскими твердотельными детекторами. Например, микроскоп установки МАС-1 (ИТЭФ), оснащенной телевизионной ПЗС-камерой SONY ССВ-М27В/СЕ производства НПК «ВИДЕОСКАН» со светочувствительным элементом ПЗС-матрицей (512×512) пикселей (фиг. 2), компьютером типа IBM PC/AT с видеоплатой и контроллером типа VS54/2.
Отличием от ближайшего аналога является то, что в предложенном способе плотность пучка частиц излучения измеряется не путем их поштучного счета, единственно возможного в сером изображении следов частиц, а путем интегрального счета числа пикселей в изображении следов частиц в кадре ПЗС-камеры, зарегистрированных твердотельным детектором в поперечном сечении пучка квазиоднородного излучения, с использованием ЭВМ, при этом измерение проводят в пороговом изображении следов частиц в сочетании с использованием численного значения порога, что позволяет решить поставленную техническую задачу и достичь указанный технический результат.
Для интегрального счета числа следов частиц излучения, зарегистрированных в плоскости твердотельного детектора, ортогональной потоку частиц, избирается технология «машинного зрения», при которой измерения осуществляются не в плоскости предмета, а в плоскости его изображения, проецируемого оптической системой микроскопа на плоскость ПЗС-матрицы пикселей телевизионной ПЗС-камеры. Аналоговый сигнал серого изображения кадра ПЗС-камеры поступает для визуального контроля на видеопросмотровое устройство оператора и параллельно на контроллер в ЭВМ - компьютер типа PC для оцифровки уровней почернений пикселей в кадре ПЗС-камеры и переходу к пороговому изображению.
Переход от серого (основного) изображения следов частиц в кадре ПЗС-камеры к их пороговому изображению начинается с процедуры определения численного значения порога, в процессе которой серые изображения следов частиц в кадре размываются до состояния, сливающегося с фоном, образуя при этом фон с измененным уровнем серого, заполняющего полностью кадр ПЗС-камеры, и передается напрямую в ЭВМ, где оцифровывается в контроллере целым числом из интервала от 0 до 255 единиц градаций уровня серого, которое принимается за численное значение порога и обозначается символом Р.
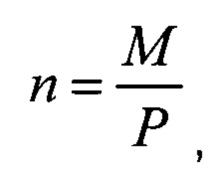
При наложении порога на серое изображение кадра (фиг. 3) пиксели ПЗС-матрицы кадра ПЗС-камеры с уровнями серого меньшими значения Р порога приобретают уровень почернения с численным значением, равным 0 (нулю). Пиксели ПЗС-матрицы кадра ПЗС-камеры с уровнями серого большими или равными значения Р перестают быть серыми и приобретают уровень почернения, равный уровню почернения порога с численным значением порога Р. Полученное изображение черных следов частиц на белом фоне называется «пороговым» изображением (фиг. 4), а описанная процедура - фильтрацией.
В пороговом изображении следов частиц на белом фоне в кадре ПЗС-камеры количество М черного в кадре измеряется суммарным количеством уровней почернений пикселей с численным значением Р, изображающих полное количество следов в кадре ПЗС-камеры, и вычисляемое по формуле:
где: М - численное значение количества черного в кадре;
Р - уровень почернения пикселя в кадре, численно равный уровню почернения Р порога;
n - число черных пикселей в кадре порогового изображения следов частиц.
При работе установки МАС-1 в пороговом черно-белом режиме, с нулевым значением фона, число следов в кадре сохраняется таким же, каким оно является в сером режиме.
Предпочтительно предложенный способ включает в себя несколько этапов, например:
1) определение уровня почернения величины порога Р и его численного значения;
2) переход от измерений количества черного в кадре к его измерению в пикселях;
3) подсчет количества следов (k) в каждом из кадров изображения ПЗС-камеры короткой серии кадров;
4) определение значения ε0, которое используется для расчетов количества следов частиц в каждом кадре последующего измерительного процесса при поточном сканировании плоскости детектора;
5) сканирование выделенной для измерений области плоскости детектора и вычисление значения (K) количества следов частиц в области плоскости детектора, захватываемой каждым из кадров изображения ПЗС-камеры;
6) вычисление плотности пучка излучаемых частиц в области плоскости детектора, захватываемой кадром ПЗС-камеры.
На первом этапе способа проводят выделение короткой серии кадров ПЗС-камеры, зафиксированных в нескольких различных точках заданной области измерения с последующим определением величины Р порога изображения в одном из кадров этой серии с последующим проведением перехода от серого изображения, генерируемого ПЗС-камерой в основном состоянии, к оцифрованному черно-белому пороговому изображению с единым численным значением Р уровня почернения порога в каждом кадре короткой серии изображений ПЗС-камеры, позволяющему перейти от измерений количества черного в изображении следов частиц в кадре ПЗС-камеры к определению количества черных пикселей ПЗС-матрицы в кадре ПЗС-камеры в изображении следов частиц, и интегральным счетом количества следов частиц во всем кадре в целом.
На втором этапе способа осуществляют определение числа n пикселей в пороговом изображении следов частиц в каждом из кадров ПЗС-камеры расчетным путем по формуле:
где: М - численное значение количества черного в каждом кадре порогового изображения следов частиц, измеряемое суммой численных значений уровней почернения пикселей в кадре, каждое из которых равно численному значению Р уровня почернения порога;
Р - численное значение порога, которому равен уровень почернения пикселя в каждом кадре;
n - число черных пикселей в каждом кадре.
На третьем этапе способа проводят поштучный подсчет числа следов (k) в каждом из кадров изображения ПЗС-камеры короткой серии кадров путем визуально-ручного способа, предполагающего проставление метки рядом со следом частицы при очередном отсчете на экране монитора.
На четвертом этапе способа рассчитывают число пикселей (ε) в одном следе в каждом из т кадров короткой серии кадров ПЗС-камеры по формуле:
где:
i - порядковый номер кадра от 1 до m, m - число кадров в короткой серии кадров,
ni - число черных пикселей в каждом i-м кадре;
ki - число следов в каждом i-м кадре короткой серии кадров, полученное визуально-поштучным счетом;
εi - число пикселей в изображении одного следа в каждом i-м кадре;
с последующим вычислением расчетных значений K' числа следов частиц в каждом i-м кадре короткой серии кадров ПЗС-камеры, при поочередно фиксируемых значениях

где: i - порядковый номер кадра от 1 до m в короткой серии кадров, m - число кадров в короткой серии кадров,

ni - число пикселей в каждом очередном для расчета кадре короткой серии кадров при каждом фиксированном значении



и определением среднего значения ε0, общего для каждого кадра короткой серии кадров, по формуле:
где:


t - число суммируемых значений

при этом полученное значение ε0 используется для расчетов числа следов частиц в каждом кадре короткой серии кадров и последующего измерительного процесса при поточном сканировании плоскости детектора.
На пятом этапе способа осуществляют сканирование выделенной для измерений области плоскости детектора с использованием общего значения ε0,
ранее установленного с помощью кадров короткой серии кадров на этапе (4), и вычисление числа следов (K) в области плоскости детектора, захватываемой каждым из кадров изображения ПЗС-камеры, по формуле:
где:
n - число черных пикселей в пороговом изображении следов частиц в кадре.
На шестом этапе способа проводят вычисление плотности пучка излучаемых частиц в области плоскости детектора, захватываемой кадром ПЗС-камеры, с использованием значения (K), ранее установленного на этапе (5), по формуле:
где: S - площадь плоскости детектора, захватываемая кадром ПЗС-камеры - величина постоянная;
D - численное значение плотности пучка частиц в поперечном сечении пучка излучения в области плоскости детектора, захваченной каждым из кадров ПЗС-камеры.
Перечень фигур
Фиг. 1. Фрагмент координатной сетки, нанесенной на плоскость облученного слюдяного детектора, предназначенной для поштучного визуального подсчета следов частиц в поле зрения оптического микроскопа.
Фиг. 2. Структура ПЗС-матрицы
1 - двумерный массив светочувствительных полупроводниковых ячеек;
2 - слой диэлектрика;
3 - подложка из поликристаллического кремния;
4 - электроды.
Фиг. 3. Кадр на видеомониторе в беспороговом сером изображении следов частиц с ненулевым значением фона.
Фиг. 4. Тот же кадр на видеомониторе, что и на фигуре 3, но его средняя часть показана уже в пороговом черно-белом изображении следов частиц с нулевым значением фона.
Перечень таблиц
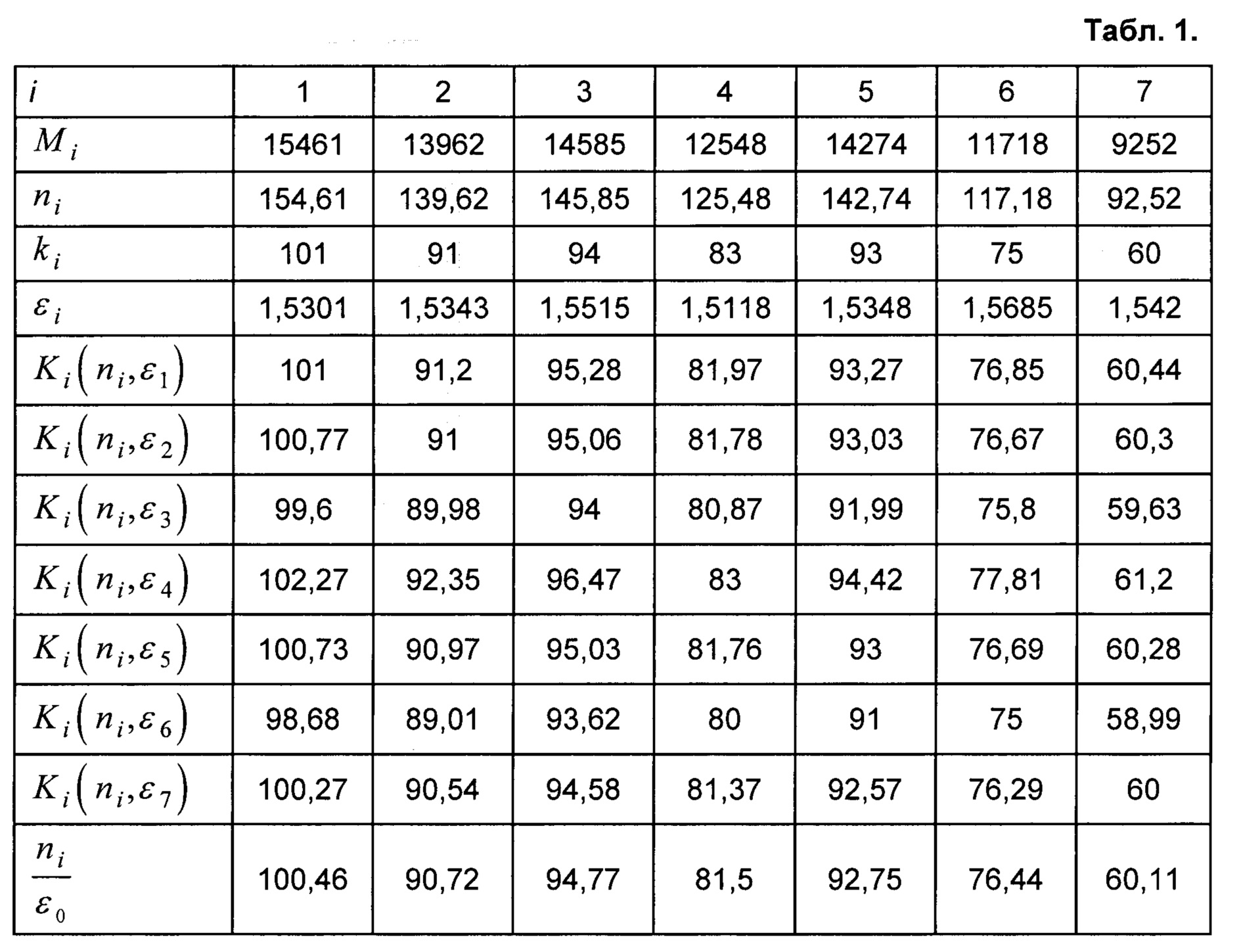
Табл. 1. Результаты измерений оцифрованных значений Mi, ki, ni, εi на установке МАС-1 (ИТЭФ).
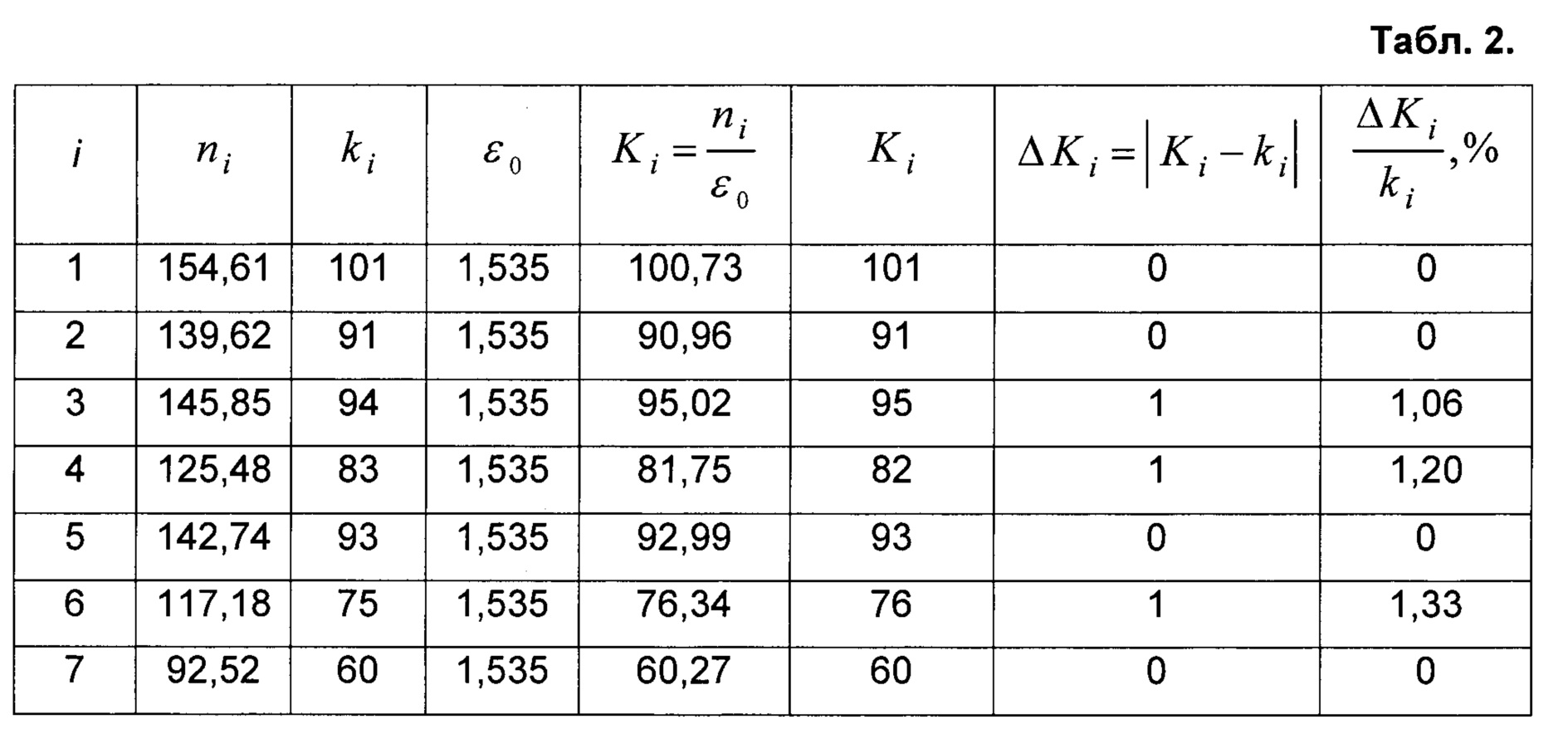
Табл. 2. Определение числа следов в кадре со средним значением ε0независимо от номера кадра.
Осуществление изобретения
В конкретном воплощении, которое является иллюстративным и никоим образом не ограничивает предложенное изобретение, способ предусматривает осуществление шести последовательных этапов:
1) создание короткой серии кадров ПЗС-камеры, зафиксированных в нескольких различных точках заданной области измерения, с последующим определением величины «порога» изображения в одном из кадров этой серии с последующим проведением перехода от серого изображения, генерируемого ПЗС-камерой в основном состоянии, к оцифрованному черно-белому пороговому изображению с единым численным значением Р уровня почернения порога в каждом кадре короткой серии изображений ПЗС-камеры, позволяющем перейти от измерений количества черного в изображении следов частиц к измерению количества черных пикселей ПЗС-матрицы в кадре ПЗС-камеры, и интегральным измерением количества следов частиц во всем кадре в целом,
2) определение числа n пикселей в пороговом изображении следов частиц в каждом из кадров ПЗС-камеры расчетным путем по формуле:
где: М - численное значение количества черного в кадре порогового изображения следов частиц, измеряемое суммарным количеством уровней почернения пикселей в кадре, численное значение каждого из которых равно численному значению Р уровня почернения порога;
Р - численное значение порога;
n - число черных пикселей в каждом кадре,
3) поштучный подсчет числа следов (k) в каждом из кадров изображения ПЗС-камеры короткой серии кадров,
4) расчет числа пикселей (ε) в одном следе в каждом из кадров короткой серии кадров ПЗС-камеры по формуле:
где:
i - порядковый номер кадра от 1 до m, m - число кадров в короткой серии кадров,
ni - число черных пикселей в i-м кадре;
ki - число следов в i-м кадре короткой серии кадров;
εi - число пикселей в изображении одного следа в i-м кадре;
с последующим вычислением значения (ε0) общего для каждого кадра короткой серии кадров и, как следствие, используемое для расчетов числа следов частиц в каждом кадре последующего измерительного процесса при поточном сканировании плоскости детектора;
5) осуществление сканирования выделенной для измерений области плоскости детектора и вычисление значения (K) числа следов в области плоскости детектора, захватываемой каждым из кадров изображения ПЗС-камеры, по формуле:
6) вычисление плотности пучка излучаемых частиц в области плоскости детектора, захватываемой кадром ПЗС-камеры, с использованием значения K, ранее установленного на этапе (5), по формуле:
где: S - площадь плоскости детектора, захватываемая кадром ПЗС-камеры - величина постоянная;
D - численное значение плотности пучка частиц в области плоскости детектора, захваченной каждым из кадров ПЗС-камеры в поперечном сечении пучка излучения.
На первом этапе предложенного способа определяется величина порога Р и его численного значения. С этой целью в произвольной точке области сканирования, пригодной для измерений, серое изображение следов частиц в кадре ПЗС-камеры размывается до состояния, сливающегося с серым фоном, заполняющим полностью весь кадр, и передается напрямую в ЭВМ, где оцифровывается в контроллере целым числом в интервале (0÷255) единиц градаций уровня серого, которое принимается за численное значение порога, обозначается символом Р и заносится в файл.
После этого размытое изображение следов частиц в кадре восстанавливается и на серое изображение кадра накладывается порог.
При наложении порога на серое изображение кадра (фиг. 3) пиксели ПЗС-матрицы кадра ПЗС-камеры с уровнями серого меньшими значения Р порога приобретают уровень почернения с численным значением, равным 0 (нулю). Пиксели ПЗС-матрицы кадра ПЗС-камеры с уровнями серого большими или равными значения Р приобретают уровень почернения, равный уровню почернения порога с численным значением порога Р. Полученное изображение черных следов частиц на белом фоне называется «пороговым» изображением (фиг. 4), а описанная процедура - фильтрацией.
После описанной выше процедуры фильтрации на втором этапе предложенного способа производится переход от измерений количества черного в кадре к его измерению в пикселях. Для этого устанавливают взаимно-однозначное соответствие между количеством М черного в кадре и числом n черных пикселей в растре кадра, принадлежащих суммарному количеству следов в кадре, описываемое математическим выражением вида:
где: М - численное значение количества черного в каждом кадре порогового изображения следов частиц, измеряемое суммой численных значений уровней почернения пикселей в кадре, каждое из которых равно численному значению Р уровня почернения порога;
Р - единое численное значение порога для каждого из кадров;
n - число черных пикселей в каждом кадре.
Зная число черных пикселей, образующих пороговое изображение всех следов частиц в кадре, для определения числа k следов в кадре достаточно узнать число ε пикселей, образующих изображение одного следа.
Для определения числа ε делается короткая серия из нескольких m кадров, например из m=7-10 кадров (в зависимости от точности измерений), захваченных в различных точках выделенной области сканирования плоскости детектора.
На третьем этапе в каждом из кадров короткой серии, проецируемом на экран монитора оператора, производится поштучный подсчет количества kiследов частиц визуально-ручным легкодоступным способом, предполагающим проставление метки рядом со следом частицы при очередном отсчете на экране монитора.
Визуальный поштучный счет количества следов частиц на экране монитора является явным, очищенным от помех, и независимым от интегрального счета. Это позволяет принять результаты визуально-ручного счета за тестовые, по отношению к которым будут определяться ошибки интегрального счета количества следов частиц в кадре ПЗС-камеры (см. табл. 2).
На четвертом этапе в каждом из т кадров короткой серии кадров определяется число εi пикселей в изображении одного следа частицы расчетом по формуле:
где:
i - порядковый номер кадра от 1 до m, m - число кадров в короткой серии кадров,
ni - число черных пикселей, составляющих пороговое изображение следов частиц квазиоднородного излучения в каждом i-м кадре;
ki - число следов в каждом i-м кадре короткой серии кадров, как результат независимого визуально-поштучного счета на экране монитора;
εi - число пикселей в изображении одного следа в каждом i-м кадре.
С каждым значением εi с фиксированным номером

где i - порядковый номер кадра от 1 до m в короткой серии кадров, m - число кадров в короткой серии кадров,


Значения


где t - число значений

Для каждого кадра короткой серии определяется ошибка интегрального счета числа следов частиц в кадре по отношению к тестовым значениям (см. табл. 2). Из табл. 2 следует, что для четырех кадров короткой серии кадров с номерами 1, 2, 5 и 7 ошибка интегрального счета составила 0%, для остальных трех кадров ошибка не превысила 1,5%.
На пятом этапе осуществляют поточное сканирование выделенной для измерений области плоскости детектора с повторением этапа (2) и использованием единого значения Р, установленного на этапе (2), и среднего значения ε0, ранее определенного на этапе (4), с последующим вычислением значения (K) количества следов частиц в каждом из захватываемых кадров изображений ПЗС-камеры, по формуле:
где n - число черных пикселей, составляющих пороговое изображение следов частиц излучения в каждом кадре ПЗС-камеры;
ε0 - постоянное расчетное значение числа пикселей в изображении одного следа частицы квазиоднородного излучения независимо от области сканирования детектора;
K - расчетное значение количества следов в каждом захваченном кадре ПЗС-камеры.
На шестом, итоговом этапе проводят вычисление плотности пучка излучаемых частиц по формуле:
где: S - площадь плоскости детектора, захватываемая кадром ПЗС-камеры, величина постоянная.
D - численное значение плотности пучка частиц в поперечном сечении пучка излучения в области плоскости детектора, захваченной каждым из кадров ПЗС-камеры.
Способ интегрального счета количества следов частиц в поперечном сечении пучка квазиоднородного излучения, зарегистрированных плоским твердотельным детектором, разрабатывался в ИТЭФ на измерительном автоматизированном координатном микроскопе, в качестве которого был использован микроскоп МАС-1, подробно описанный в [6].
Микроскоп МАС-1 укомплектован безынерционными электродвигателями для точного перемещения кареток по командам оператора, датчиками линейных перемещений кареток с ценой отсчета 1 мкм и телевизионной ПЗС-камерой с растром светочувствительной ПЗС-матрицы кадра (512×512) пикселей (см. фиг. 2).
Перемещение кареток и регистрация кадров изображений в телекамере, при сканировании детектора, осуществляются по командам оператора с пульта управления, укомплектованного компьютером типа PC, с контроллером для оцифровки черно-белых изображений в диапазоне (0÷255) градаций почернений, как это использовалось, например в [7], ЭВМ для управления перемещением кареток и монитором для визуального контроля за изображением в кадре ПЗС-камеры с ~103 кратным увеличением.
Проводимые на установке МАС-1 с телевизионным съемом и передачей информации в компьютер измерения начинаются с выделения короткой серии кадров, состоящей из 7 кадров ПЗС-камеры, каждый из которых был
зафиксирован в одной из 7 различных точек (xi,yi), i=(1,2,…,7) области измерений.
В одном из 7 кадров производится процедура определения уровня почернения порога и его численного значения (Р). Для этого изображение следов частиц в сером режиме работы ПЗС-камеры расфокусируется до состояния почернения кадра подобного фону с новым уровнем почернения, которое принимается за уровень почернения порога и оцифровывается значением Р порога. При переходе в пороговый режим работы ПЗС-камеры со значением порога Р, пиксели с уровнем почернения меньшим Р оцифровываются в контроллере нулевым значением уровня почернения. Каждый пиксель в кадре с уровнем почернения большим или равным Р оцифровываются значением уровня почернения, равным значению Р порога. Изображение кадра называется пороговым, а освобождение изображения от фона - называют фильтрацией.
Таким образом, при работе ПЗС-камеры в пороговом режиме кадры изображений следов частиц освобождаются от фона, и количество черного в кадре определяется только количеством черных пикселей со значением уровня почернения равным Р, образующих следы частиц в кадре.
В дальнейшем все измерения производятся в пороговом режиме работы ПЗС-камеры с принятым значением Р порога.
Следующим этапом является переход от количественных измерений в единицах почернений следов частиц к измерениям, выражаемым в штуках пикселей.
С этой целью в каждой точке (xi,yi),i=(1,2,…,7) короткой серии кадров прямым измерением определялось оцифрованное количество Mi черного в кадре порогового изображения следов, с последующим определением числа niчерных пикселей в одном кадре расчетом по формуле:
где ni - число черных пикселей в кадре;
Р=100 - оцифрованное значение порога.
Далее визуально-ручным способом, путем проставления метки рядом со следом частицы, производится поштучный подсчет числа ki следов частиц в кадре короткой серии, проектируемом на экран монитора. По данным измеренных ni и ki для каждого из семи кадров расчетным путем определялась величина
где εi - число черных пикселей в изображении i-го следа короткой серии кадров.
Оцифрованные значения Mi, ki, ni, εi записывались в виде файла на PC, которые отражены в табл. 1.
В случае однородных пучков, при облучении плоскости твердотельного детектора однородным пучком частиц под углом 90° к плоскости, следы частиц в плоскости детектора будут иметь одинаковый размер, а, следовательно, и одинаковое число пикселей, приходящихся на один след.
Однако в квазиоднородном пучке размеры следов частиц флуктуируют относительно некоторого среднего значения, которое обозначено в настоящей заявке как ε0.
Для определения единого численного значения ε0, с помощью которого будет рассчитываться число K следов частиц в каждом кадре, при сканировании плоскости детектора, для каждого из семи кадров было рассчитано число следов с каждым из семи значений εi, что отражено в табл. 1.
Среди семи значений εi были отобраны четыре значения, при которых расчетные значения Ki удовлетворяли условию |Ki-ki|≤0,5 для наибольшего количества номеров кадра i. Таковыми значениями оказались значения ε1, ε2, ε5 и ε7 в кадрах с номерами i=1, i=2, i=5 и i=7 соответственно, для которых было рассчитано среднее значение ε0 по формуле:
Полученное значение ε0=1,535 было использовано для определения числа Ki следов частиц в каждом кадре короткой серии кадров независимо от номера кадра в соответствии с выражением
и полученные значения отражены в табл. 2.
Из табл. 2 видно, что в четырех кадрах из семи расчетные значения Ki, округленные до целых чисел, совпадают со значениями ki в тех же кадрах при поштучном счете. Несовпадение на один след с количеством следов при поштучном счете в оставшихся трех кадрах составляет ошибку, не превышающую 1,5% (см. табл. 2).
На основании полученных результатов, отраженных в табл. 2, численное значение ε0=1,535 принимается за расчетное значение (ε0). Выражение для интегрального счета количества изображений следов частиц в кадре ПЗС-камеры при поточном сканировании области измерений имеет следующий вид:
где: n - численное значение количества черных пикселей в пороговом изображении следов частиц в кадре;
ε0=1,535 - расчетное значение количества пикселей в одном следе изображения, общее для каждого следа в каждом из кадров;
K - расчетное значение количества изображений следов частиц в кадре телевизионной ПЗС-камеры.
Численное значение D плотности частиц в поперечном сечении пучка излучения, зарегистрированных в области плоскости детектора, захваченной каждым из кадров ПЗС-камеры, определяется по формуле:
где: S - площадь плоскости детектора, захватываемая прямоугольным кадром ПЗС-камеры, величина постоянная и в условиях описанных измерений на установке МАС-1 имеет следующее значение:
S=Δх×Δу=0,395 мм × 0,380 мм=0,150100 мм2.
Взяв из табл. 2, к примеру, значение K1=101, получим значение плотности пучка излучаемых частиц, зарегистрированных в области плоскости детектора, захваченной кадром №1 ПЗС-камеры, равное:
Вышеуказанные данные подтверждают возможность осуществления заявленного изобретения с достижением указанного технического результата - определения распределения плотности излучения по поперечному сечению пучка частиц с высокой достоверностью - (98÷100)% (см. табл. 2), что позволяет использовать предложенный способ для высокоточного радиобиологического контроля пучков [9-11] в области лучевой медицины, спектроскопии элементарных частиц, а также в областях науки и техники, где используются трековые детекторы.
Предлагаемый полуавтоматический способ измерения плотности частиц в поперечном сечении пучка квазиоднородного излучения источника не требует больших финансовых затрат и достаточно прост в его осуществлении.
Список литературы:
1. Антоньева И.А. // ЖЭТФ. 1956. Т. 30. С. 571.
2. Reitman D., Schneider Н. et. al. // Nucl. Inst. and Metods. 1963. V. 22. P. 345-350.
3. Желтов С.Ю., Визильтер Ю.В. Машинное зрение: задачи и возможности // Технологии машинного зрения. Регистрация и анализ цифровых изображений. 2002. С. 14.
4. А.Б. Александров, М.С. Владимиров, Л.А Гончарова, Н.С. Коновалова, П.И. Орлова, Н.Г. Полухина, Н.И. Старков, М.М. Чернявский, А.О. Щелканов. Автоматизация измерений в толстослойных ядерных эмульсиях при продольном облучении ядрами с энергией 1 ГэВ на нуклон с целью получения обзорной информации по зарядовым состояниям вторичных частиц. Препринт ФИАН. 2007. 23 С.
5. А.В. Бахмутова, В.А. Дитлов, М.А. Колыванова. Измерение плотности пучка ускоренных ионов12С с помощью компьютерного анализа микроснимков протравленных поверхностей пластика CR-39 // Приборы и техника эксперимента. 2018. №5. С. 107-117.
6. Ю.Д. Алешин, В.В. Колесников, В.И. Силаев. Микроскоп МАС-1 для поиска и обмера событий в ядерных фотоэмульсиях размерами 400×400 мм // Приборы и техника эксперимента. 1997. №2. С. 43-46.
7. Алешин Ю.Д., Исламов Т.А., Калинников В.Г., Камбарова Н.Т., Колесников В.В., Силаев В.И., Солнышкин А.А. Методика обработки бета-спектрограмм на универсальной установке МАС-1 // Приборы и техника эксперимента. 2001. №3. С. 72-76.
8. В.В. Смалюк. Диагностика пучков заряженных частиц в ускорителях. Новосибирск. Издательство Параллель. 2009. 293 С.
9. Stelzer Н. // Nucl. Phys. В (Proc. Suppl.). 1998. V. 61 В. Р. 650.
10. Torikoshi М., Minohara S., Kanematsu N., Komori M., Ranazawa M., Noda K., Miyahara N.. Itoh H., Endo M., Kanai T.J. // J. Radiat. Res. 2007. V. 48. Suppl. A: A15-A25.
11. Akagi Т., Higashi A., Tsugami H., Sakamoto H., Masuda Y., Hishikawa Y. // Phys. Med. Biol. 2003. Nov 21. V. 48. №22. P. N301.
Реферат
Изобретение относится к области физики элементарных частиц, в частности к прецизионным измерительным системам параметров пучка излучаемых частиц. Сущность изобретения состоит в измерении плотности пучка путем интегрального счета количества следов частиц в изображении каждого из кадров ПЗС-камеры за одно измерение, зарегистрированных твердотельным детектором в поперечном сечении пучка квазиоднородного излучения, с использованием ЭВМ, при этом измерение проводят в пороговом режиме ПЗС камеры в сочетании с использованием численного значения порога. Техническим результатом изобретения является возможность определения распределения плотности излучения по поперечному сечению пучка частиц с высокой достоверностью. 7 з.п. ф-лы, 4 ил., 2 табл.
Формула







Документы, цитированные в отчёте о поиске
Способ получения протонных изображений
Комментарии