Исполнительная система для устройства извлечения биологической жидкости и соответствующих способов - RU2372102C2
Код документа: RU2372102C2
Чертежи
Описание
Область техники
Настоящее изобретение в общем относится к медицинским устройствам и, в частности, к медицинским устройствам для извлечения биологических жидкостей и соответствующим способам.
Уровень техники
Для многих медицинских состояний, таких как диабет, требуется постоянное контролирование концентрации анализируемого вещества (например, концентрация глюкозы) в крови, внутритканевой жидкости или в других образцах биологических жидкостей. Обычно для этого постоянного контролирования требуется извлечение образца биологической жидкости из нужного места (например, из кожной ткани пальца пациента). Извлечение (которое также называется «выдавливанием») образца жидкости организма из нужного места обычно предполагает вскрытие нужного места кожной ткани и приложение давления вблизи вскрытого места для выдавливания образца.
Известно применение различных устройств извлечения биологической жидкости (например, подпружиненные устройства ланцетного действия), содействующих выдавливанию образца биологической жидкости. Для этих устройств извлечения биологической жидкости требуется, чтобы пользователь зарядил устройство, прижал устройство к нужному месту и затем нажал кнопку или другой переключатель, чтобы вручную привести в действие устройство, при этом элемент проникновения в кожную ткань (например, ланцет) в устройстве будет пущен к нужному месту. Затем элемент проникновения в кожную ткань проникает (т.е. вскрывает) в нужное место, тем самым создавая отверстие для выдавливания образца жидкости организма.
Извлечение образца биологической жидкости с помощью обычных устройств извлечения биологической жидкости может вызывать боль и/или дискомфорт пользователя. Эта боль и/или дискомфорт отчасти обусловлены физическим проникновением в нужное место элемента проникновения в кожную ткань. Но в значительной степени эта боль и/или дискомфорт могут также иметь психологический характер из-за того, что пользователь с опасением ожидает чужеродного проникновения в упомянутое место, и из-за неприятного звука приведения в действие устройства вручную. Это опасение обычно возникает, когда пользователь прижимает устройство извлечения биологической жидкости к нужному месту и сознательно решает, пускать ли в действие элемент подкожного проникновения. Помимо этого, это опасение может обусловить усиление боли и/или дискомфорт, т.к. пользователь физически растягивает нужное место в ожидании проникновения.
Боль и/или дискомфорт для пользователя могут также иметь место, когда попытка извлечения образца биологической жидкости неудачная и пользователь должен сделать еще одну попытку извлечения образца жидкости организма. Неудачные попытки извлечь образец биологической жидкости могут происходить, например, когда устройство извлечения биологической жидкости не находится в должной ориентации при прижатии к нужному месту или не прижато к месту с нужным давлением.
Поэтому в данной области техники необходимо обеспечить медицинское устройство и соответствующие способы, которые уменьшат боль и/или дискомфорт, связанные с извлечением образца биологической жидкости или опасением проникновения в место применения устройства и/или из-за неуспешных попыток извлечь образец биологической жидкости.
Сущность изобретения
Медицинские устройства и способы согласно осуществлениям настоящего изобретения направлены на уменьшение боли и/или дискомфорта, связанных с извлечением образца биологической жидкости и вызываемых тем, что пользователь с опасением ожидает проникновения в место, в котором будет применяться устройство. Медицинские устройства и способы также направлены на сведение к минимуму неудачных попыток извлечения образца биологической жидкости. Медицинские устройства согласно осуществлениям настоящего изобретения включают в себя и исполнительные системы устройств извлечения биологической жидкости, и устройства извлечения биологической жидкости, которые содержат исполнительную систему.
Осуществления исполнительных систем для устройства извлечения биологической жидкости согласно настоящему изобретению содержат детекторную головку, по меньшей мере один датчик вибрации, соединенный с детекторной головкой, и по меньшей мере один блок обработки сигнала, который сообщается по меньшей мере с одним датчиком вибрации. Помимо этого, блок обработки сигнала выполнен с возможностью приема выходного сигнала по меньшей мере от одного датчика вибрации, с возможностью анализирования принимаемого выходного сигнала и направления исполнительного сигнала в устройство извлечения биологической жидкости на основе анализа принимаемого выходного сигнала.
Исполнительные системы согласно осуществлениям настоящего изобретения уменьшают боль и/или дискомфорт пользователя, вызываемые тем, что пользователь с опасением ожидает проникновения в место применения устройства, путем устранения необходимости ручного приведения в действие устройства извлечения биологической жидкости. Вместо ручного приведения его в действие пользователем устройство обработки сигнала автоматически направляет исполнительный сигнал в устройство извлечения биологической жидкости на основе анализа выходных сигналов, принимаемых от датчика(ов) вибраций. Помимо этого, анализ принимаемого сигнала может указывать, когда устройство извлечения биологической жидкости надлежащим образом прижато к нужному месту, тем самым сводя к минимуму неудачные попытки извлечения биологической жидкости.
Осуществления устройства извлечения биологической жидкости согласно настоящему изобретению включают в себя корпус, механизм ланцетного действия, перемещаемый по отношению к корпусу, прикрепленный к механизму ланцетного действия ланцет, автоматический пусковой механизм и исполнительную систему. Причем исполнительная система содержит детекторную головку, по меньшей мере один датчик вибрации, соединенный с детекторной головкой, и по меньшей мере одно устройство обработки сигнала, связанное по меньшей мере с одним датчиком.
Устройство обработки сигнала в устройстве извлечения биологической жидкости принимает выходной сигнал по меньшей мере от одного датчика вибраций, анализирует принимаемый выходной сигнал и направляет исполнительный сигнал в автоматический пусковой механизм на основе анализа принимаемого сигнала.
Краткое описание чертежей
Признаки и преимущества настоящего изобретения поясняются с обращением к приводимому ниже подробному описанию иллюстративных примеров, применяющих принципы изобретения, и с обращением к прилагаемым чертежам (на которых аналогичные ссылочные обозначения представляют аналогичные элементы), на которых
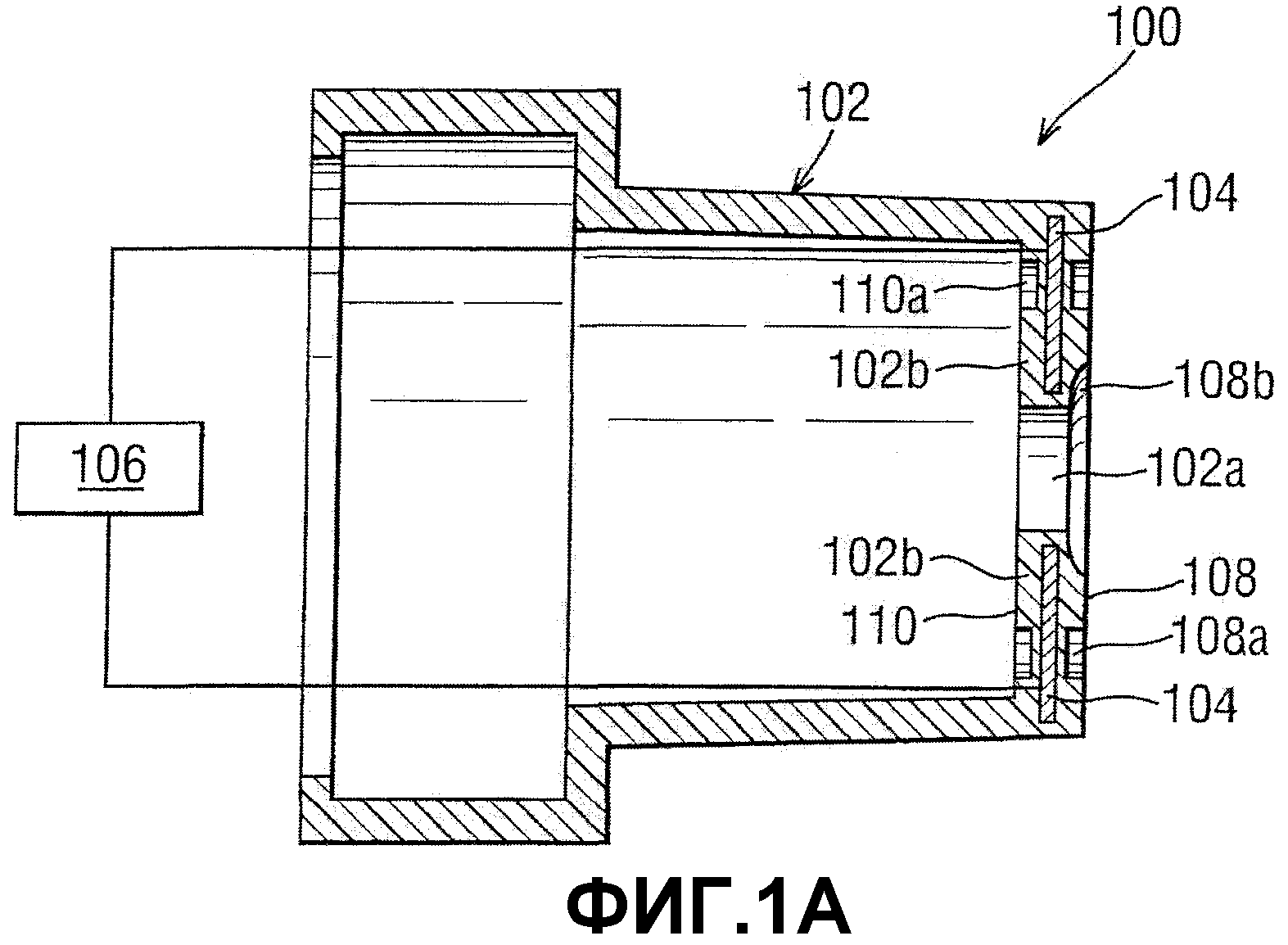
Фиг.1А - упрощенное, в поперечном сечении, и схематическое изображение (не в масштабе) исполнительной системы согласно приводимому в качестве примера осуществлению настоящего изобретения;
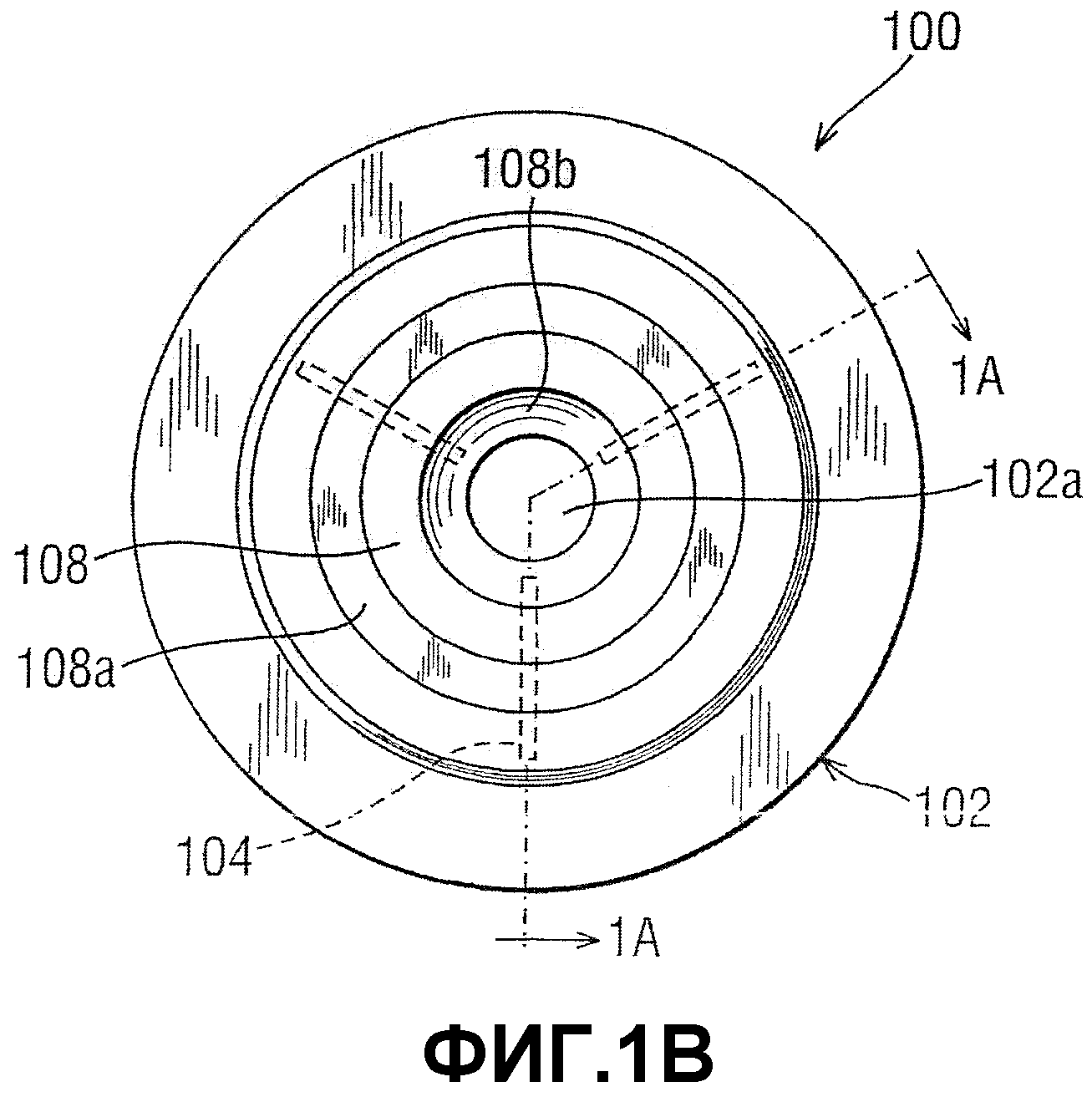
Фиг.1В - упрощенный вид снизу (т.е. обращенный к дальнему концу детекторной головки) исполнительной системы, показываемой на фиг.1А;
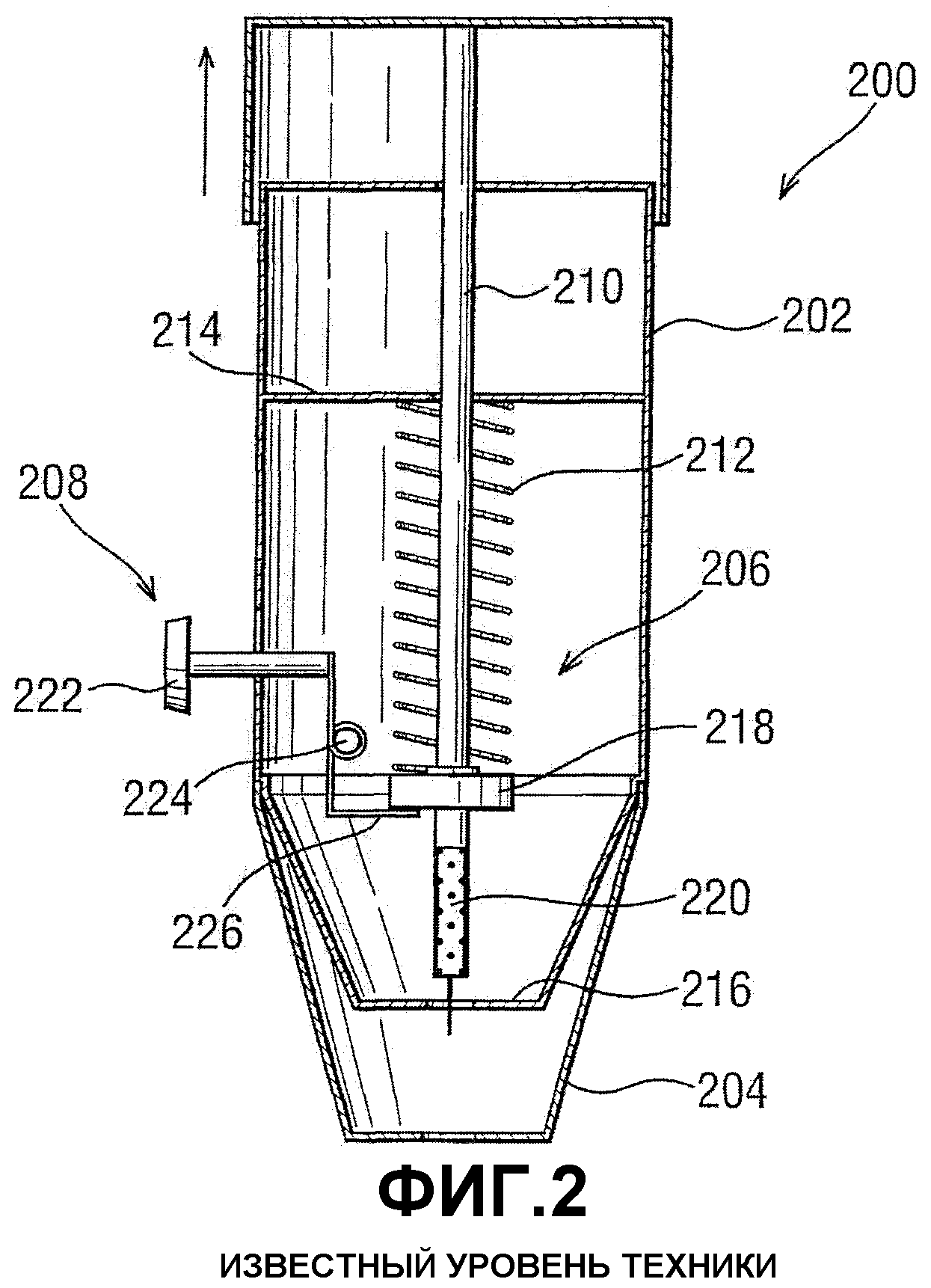
Фиг.2 - упрощенное, в поперечном сечении, изображение (не в масштабе) обычного подпружиненного медицинского устройства для извлечения биологической жидкости (т.е. устройства ланцетного действия), которое можно скомбинировать с исполнительными системами согласно приводимым в качестве примера осуществлениям настоящего изобретения;
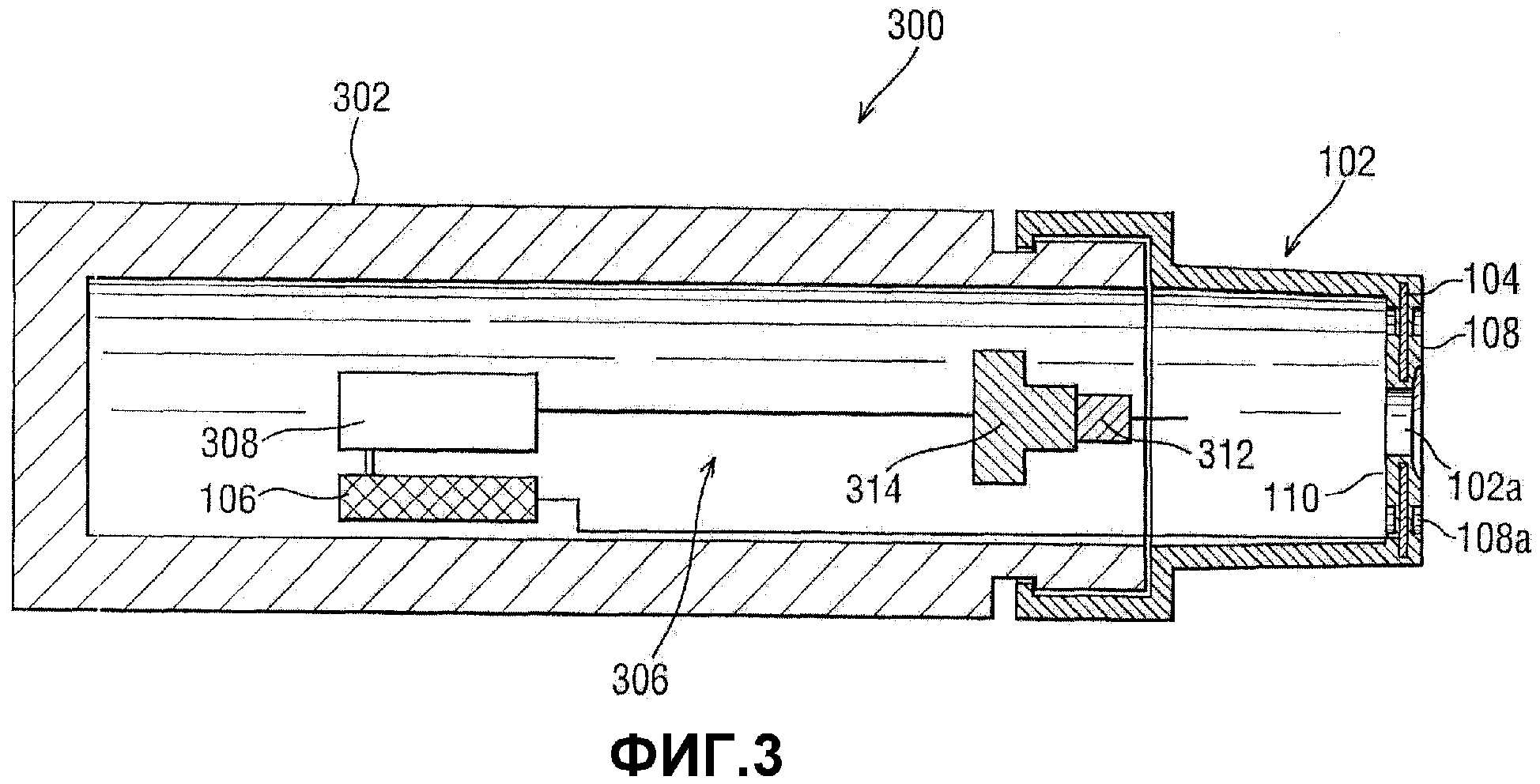
Фиг.3 - упрощенное схематическое, в поперечном сечении, изображение (не в масштабе) устройства извлечения биологической жидкости согласно приводимому в качестве примера осуществлению настоящего изобретения, содержащему исполнительную систему, изображенную на фиг.1;
Фиг.4 упрощенное схематическое, в поперечном сечении, изображение (не в масштабе) устройства извлечения биологической жидкости, изображенного на фиг.3; устройство содержит дополнительные датчики давления в исполнительной системе;
Фиг.5 - блок-схема последовательности этапов обработки согласно приводимому в качестве примера осуществлению настоящего изобретения.
Подробное описание изобретения
Фиг.1А и 1В показывают упрощенные изображения в перспективе/схематическое, и изображение вида снизу соответственно исполнительной системы 100 для устройства извлечения биологической жидкости согласно приводимому в качестве примера осуществлению настоящего изобретения. Обращаясь к фиг.1А и 1В: исполнительная система 100 содержит детекторную головку 102, по меньшей мере один датчик(и) 104 вибрации, соединенный с детекторной головкой 102, и блок 106 обработки сигнала (БОС), связанной с датчиком(ами) 104 вибрации.
Детекторная головка 102 имеет дальнюю поверхность 108 и ближнюю поверхность 110. Помимо этого детекторная головка 102 имеет отверстие 102а и отклоняемую часть 102b. В осуществлении согласно фиг.1А и 1В: датчики 104 вибрации встроены в детекторную головку под дальней поверхностью 108. Но датчик(и) 104 вибрации можно подключить к детекторной головке 102 любым соответствующим способом, например его(их) можно установить на поверхности головки. Блок 106 обработки сигнала выполнен с возможностью приема выходных сигналов от каждого из датчиков 104 вибрации, анализирования принимаемых выходных сигналов и направления исполнительного сигнала в устройство извлечения жидкости организма на основе анализа принимаемого выходного сигнала.
Дальняя поверхность 108 и ближняя поверхность 110 имеют углубления 108а и 110а соответственно. Дальняя поверхность 108 также содержит углубленную часть 108b. Когда усилие прилагается к дальней поверхности 108 (например, усилие от прижатия детекторной головки 102 к нужному месту), то при этом отклоняемая часть 102b детекторной головки 102 изгибается внутрь (справа налево согласно фиг.1А). При этом датчик(и) 104 вибрации подвергается изгибающему механическому усилию. Согласно приводимому ниже более подробному пояснению: если датчик(и) 104 вибрации является пьезовибрационным датчиком, то вибрационный датчик(и) 104 будет, например, формировать сигнал электрического напряжения при реагировании на вибрацию (например, вибрацию в диапазоне амплитуды 10-100 микрон), вызываемую пульсацией крови в нужном месте.
В исполнительной системе 100 детекторная головка 102 имеет форму, обеспечивающую возможность ее плотной посадки на корпусе устройства извлечения биологической жидкости. Но в исполнительных системах настоящего изобретения можно применять детекторную головку любой соответствующей формы. Детекторную головку 102 можно сформировать, например, из упруго деформируемого материала, включая, но не ограничиваясь ими эластомерные, полимерные, полиуретановые материалы, латекс, кремнийорганический материал или любые их сочетания. Эти упруго деформируемые материалы могут, например, деформироваться, чтобы соответствовать контуру нужного места (например, нужного места кожной ткани на пальце пользователя), к которому во время использования устройства прижимается дальняя поверхность 108 детекторной головки. Либо детекторную головку 102 можно сформировать, например, из таких жестких материалов, как жесткая пластмасса или жесткие металлические материалы.
Датчики 104 вибраций могут быть любыми известными из уровня техники целесообразными датчиками вибрации, включая, например, пьезовибрационные датчики (например, пьезовибрационные датчики “biomorph 32”, которые выпускает компания RS Components, Норсэнтс. Великобритания) и акселерометрические датчики. Согласно осуществлению, показанному на фиг.1А и 1В, датчики 104 вибраций встроены под дальней поверхностью 108 детекторной головки 104. Либо вибрационные датчики могут быть частично встроены в детекторную головку 102 или прикреплены к ней иным образом. Несмотря на то, что в пояснительных целях в осуществлении согласно фиг.1А и 1В показаны три датчика вибрации, исполнительная система согласно осуществлениям настоящего изобретения может иметь любое целесообразное число датчиков вибрации. Датчики вибрации можно любым соответствующим образом установить на детекторной головке или в ней. Для более точного обнаружения вибрации и определения должной ориентации детекторной головки на нужном месте датчики 104 вибрации, предпочтительно, расположены по окружности детекторной головки 104 по существу через равные интервалы согласно фиг.1А и 1В.
Специалистам в данной области техники будет ясно, что датчики 104 вибрации преобразуют механическую энергию колебаний в электрическую энергию. Например, пьезовибрационный датчик может формировать выходной электрический сигнал, пропорциональный величине механического напряжения, воздействующего на пьезовибрационный датчик. То есть, когда пьезовибрационный датчик подвергается вибрации, вызванной механическим напряжением, пьезовибрационный датчик формирует выходной сигнал (например, выходной сигнал электрического напряжения), пропорциональный механическому напряжению.
Пульсация крови в нужном месте обусловливает вибрацию, воспринимаемую датчиками 104 вибрации, когда детекторная головка 102 прижата к нужному месту. Эта вибрация обусловливает формирование выходного сигнала в каждом из датчиков 104 вибрации (например, выходной сигнал электрического напряжения). Типичным сигналом электрического напряжения может быть, например, сигнал в пределах 4 В от минимума к минимуму.
Выходные сигналы от каждого их датчиков 104 вибрации передаются на блок 106 обработки сигнала, где они принимаются и обрабатываются. Например, блок 106 обработки сигнала может быть логическим устройством обработки сигнала, специализированной интегральной схемой или программируемым микропроцессором.
Когда детекторная головка 102 прижата к нужному месту перед извлечением из него образца жидкости организма, блок 106 обработки сигнала можно использовать для того, чтобы определить, находится ли детекторная головка в оптимальной ориентации и положении для извлечения биологической жидкости на основе анализа выходных сигналов, принимаемых от датчиков 104 вибрации.
Например, оптимальная ориентация и положение могут соответствовать выходным сигналам от каждого из датчиков вибрации, находящимся в заданных пределах и согласованных в пределах заданного допустимого значения с выходными сигналами других датчиков вибраций. Если исполнительная система содержит три одинаковых датчика вибрации (каждый из которых соединен с детекторной головкой одинаковым способом), то блок обработки сигнала будет принимать выходные сигналы от каждого из трех датчиков вибрации и, например, сравнивать выходные сигналы друг с другом и направлять исполнительный сигнал только в том случае, если три выходных сигнала согласуются в приемлемых пределах. В этом случае безусловно предполагается, что согласованность трех выходных сигналов показывает, что каждый датчик вибрации воспринимает одинаковые колебания и что, поэтому, детекторная головка ровно установлена на нужном месте.
При изучении данного раскрытия специалисту в данной области техники будет понятно, что, в общем, блок обработки сигнала анализирует выходной сигнал(ы) от датчика(ов) вибрации в отношении наличия характерного выходного сигнала, указывающего должное позиционирование детекторной головки на нужном месте. После обнаружения блоком обработки сигнала наличия этого характерного выходного сигнала блок обработки сигнала направляет исполнительный сигнал в устройство извлечения биологической жидкости.
Из излагаемого выше описания специалисту в данной области техники будет понятно, что анализ выходных сигналов блоком обработки сигнала обусловит приведение в действие устройства извлечения жидкости организма только в том случае, когда устройство надлежащим образом прижато к нужному месту. Наоборот, при неправильном прижатии (например, прижатие не в прямой ориентации к нужному месту) блок обработки сигнала не направит сигнал приведения в действие в устройство извлечения биологической жидкости. Таким образом, неуспешные попытки извлечения образца жидкости организма будут сведены к минимуму. Помимо этого, поскольку от пользователя не требуется приведение в действие устройства извлечения биологической жидкости вручную, поэтому боль/дискомфорт, связанные с опасением чужеродного проникновения или звуком ручного приведения в действие устройства, устранены.
Исполнительная система 100 согласно фиг.1А и 1В может содержать, как вариант, по меньшей мере один датчик давления (не показан на фиг.1А и 1В), связанный с блоком 106 обработки сигнала. Для этого можно использовать любой целесообразный датчик давления, включая, например, датчик давления с миниатюрным переключателем мгновенного действия или измерительный преобразователь давления (которые выпускает компания RS Components Ltd., Берчингтон Роуд, Корби, Норсэнтс, НН17 9РС, Великобритания).
Помимо этого, если в состав исполнительной системы 100 дополнительно входит датчик(и) давления, то блок 106 обработки сигнала также выполнен с возможностью приема сигнала от каждого из датчиков давления для анализирования принимаемого от датчиков давления сигнала, и возможностью направлять исполнительный сигнал в устройство извлечения биологической жидкости на основе анализа сигналов, принимаемых от датчиков давления. Исполнительные системы согласно осуществлениям настоящего изобретения могут иметь любое соответствующее число датчиков давления. Причем эти датчики давления могут, например, находиться на детекторной головке или могут быть оперативно подключены к ней любым соответствующим способом. Для более точного обнаружения давления датчики давления предпочтительно расположены по существу через равные интервалы друг от друга.
Согласно данному изобретению датчики давления входят в состав исполнительных систем как опция. Но наличие этих датчиков обеспечивает средство для постоянного контролирования усилия, с которым детекторная головка 102 прижимается к нужному месту, путем выполняемого блоком обработки сигналов анализа сигналов, принимаемых от датчика(ов) давления. Поэтому использование датчиков давления обеспечивает дополнительную информацию, характеризующую взаимосвязь между детекторной головкой 102 и нужным местом. Например, анализ сигналов от датчиков давления может указывать, насколько сильно детекторная головка 102 прижата к нужному месту; при этом устройство обработки сигнала направляет исполнительный сигнал только в случае, если анализ указывает, что имеется соответствующее давление, обеспечивающее успешное выдавливание образца жидкости организма.
Исполнительная система 100 выполнена с возможностью ее использования с таким устройством извлечения биологической жидкости, как подпружиненное устройство ланцетного действия. Фиг.2 показывает упрощенное изображение подпружиненного устройства 200 ланцетного действия, с которым можно использовать исполнительные системы согласно осуществлениям настоящего изобретения. Это подпружиненное устройство 200 ланцетного действия содержит корпус 202, концевой колпачок 204, механизм 206 ланцетного действия, выполненный с возможностью перемещения по отношению к корпусу, и пусковой механизм 208.
Механизм 206 ланцетного действия содержит заряжающее устройство 210, пружину 212, упор 214, концевой упор 216, держатель 218 ланцета и ланцет 220. Пусковой механизм 208 содержит пусковую кнопку 222, шарнир 224 и защелку 226.
Подпружиненное устройство 200 ланцетного действия для извлечения образца биологической жидкости (например, образца крови) из нужного места (такого как участок кожной ткани на пальце пользователя) обычно используется в следующем порядке. После установки ланцета 220 в держателе ланцета 218 механизм 206 ланцетного действия заряжают оттягиванием заряжающего элемента 210 в направлении стрелки, показанной на фиг.2. В результате этой заряжающей операции: (i) пружина 212 сжимается между стопором 214 и держателем ланцета 218, и (ii) защелка 226 защелкивает держатель 218 ланцета согласно фиг.2. Концевой колпачок 204 подпружиненного устройства 200 ланцетного действия затем прижимают к нужному месту с достаточным давлением, чтобы обеспечить выдавливание образца жидкости организма после вскрытия нужного места. Предпочтительно, чтобы концевой колпачок был симметрично (прямо) прижат к нужному месту, поскольку эта симметричная ориентация повышает вероятность успешного извлечения образца биологической жидкости.
Затем в результате нажатия пользователем пусковой кнопки 222 пусковой механизм 206 поворачивается вокруг шарнира 224, отводя защелку 226 и отпуская держатель 218 ланцета. Высвобождение держателя 218 ланцета обусловливает расширение пружины 212, запуская ланцет 220 к нужному месту. Держатель 218 ланцета и концевой упор 216 не дают ланцету 220 пройти большее, чем заданное, расстояние.
Как упомянуто выше, пользователю, возможно, будет трудно симметрично прижать концевой колпачок 204 к нужному местоположению и определить, когда достаточное давление действительно приложено к нужному местоположению для выдавливания образца жидкости организма. Но применение исполнительных систем согласно осуществлениям настоящего изобретения с устройством извлечения жидкости организма (например, подпружиненного устройства 200 ланцетного действия согласно фиг.2) позволяет определить симметричную ориентацию и, дополнительно, достаточное давление, что позволяет автоматически привести в действие устройство извлечения биологической жидкости.
Фиг.3 показывает упрощенное схематическое, в поперечном сечении, изображение устройства 300 извлечения биологической жидкости (например, устройство ланцетного действия) согласно приводимому в качестве примера осуществлению настоящего изобретения, содержащему исполнительную систему 100 согласно фиг.1А и 1В. Устройство 300 извлечения биологической жидкости также содержит корпус 302, механизм 306 ланцетного действия (который перемещается по отношению к корпусу 302) и автоматический пусковой механизм 308. Механизм 306 ланцетного действия содержит ланцет 312 (например, ланцет, выполненный заодно с индикаторной полоской) и держатель 314 ланцета. Детекторная головка 102 содержит отверстие 102а, в котором выпуклость нужного места можно создать при прижатии детекторной головки 102 к нужному местоположению.
Автоматический пусковой механизм 308 может быть любым известным из уровня техники целесообразным автоматическим пусковым механизмом, включая, помимо прочего, пьезоэлектрический механизм согласно патентной заявке Великобритании №0323350.9 (досье поверенного №DDI-5018, подана 06 октября 2003 г.). Другие автоматические пусковые механизмы могут быть, например, следующими: (i) механизмами, которые электронными средствами отводят защелку, чтобы высвободить сжатую пружину, расширение которой пускает ланцет к нужному месту, или (ii) электромагнитными приводами.
Согласно вышеизложенному выходные сигналы от датчиков 104 вибрации анализирует блок 106 обработки сигнала, чтобы определить, когда детекторная головка 102 надлежащим образом позиционирована при ее прижатии к нужному месту. Наоборот, выходные сигналы от датчиков 104 вибрации можно также анализировать блоком обработки сигнала, чтобы обнаружить неправильное позиционирование детекторной головки 102 и запретить пуск ланцета 312.
Специалисту в данной области техники при изучении этого описания будет ясно, что осуществление устройств извлечения биологической жидкости согласно настоящему изобретению может включать в себя детекторные головки разных конфигураций, включая, например, единую комплексную детекторную головку, которая является и концевым колпачком, и детекторной головкой (как показано на фиг.3).
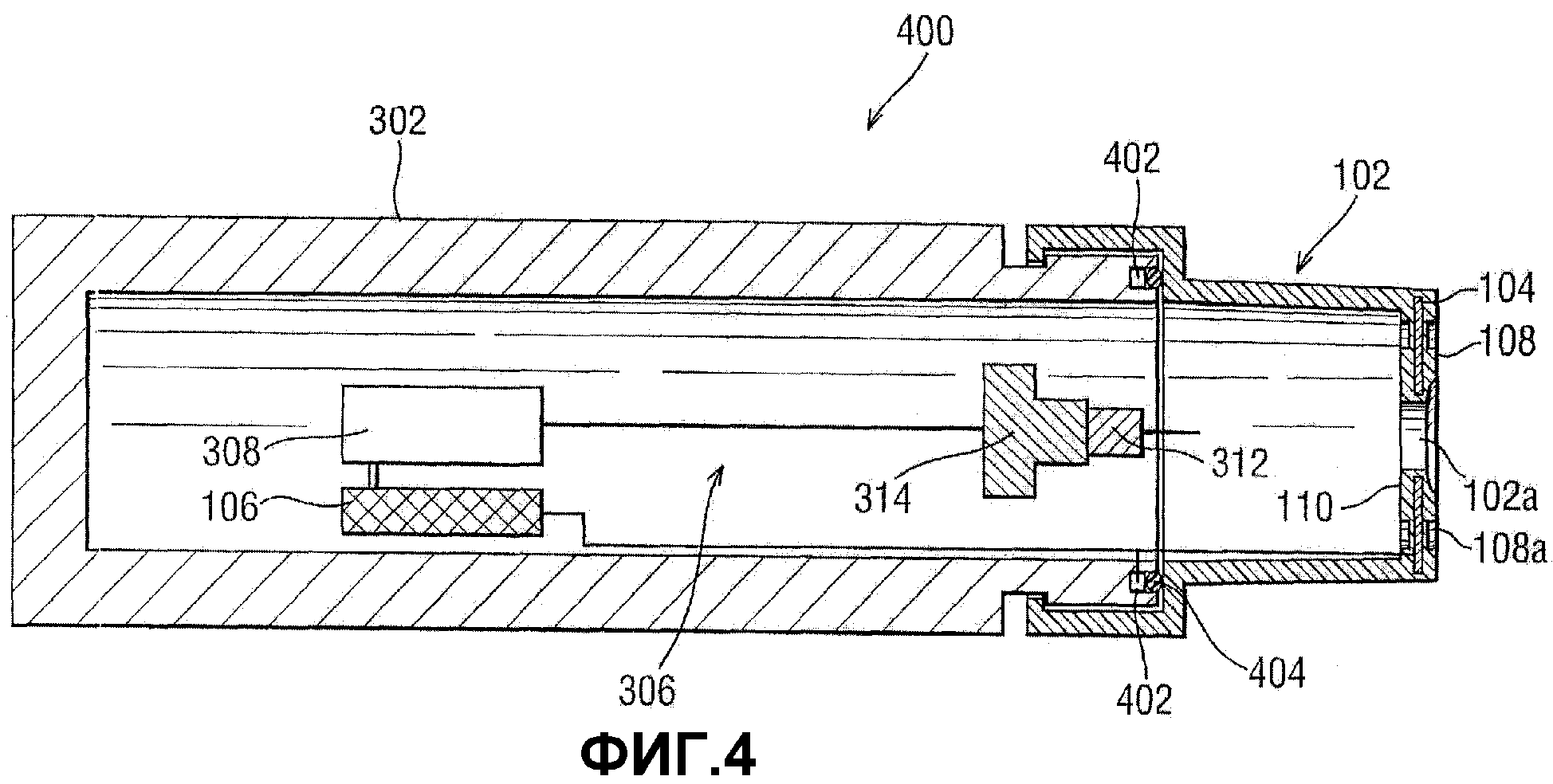
Фиг.4 показывает упрощенное схематическое, в поперечном сечении, изображение устройства 400 извлечения биологической жидкости согласно еще одному приводимому в качестве примера осуществлению настоящего изобретения, которое идентично устройству 300, показываемому на чертеже фиг.3, за исключением (а) датчиков 402 давления, (б) сжимаемого уплотнительного кольца 404 и (в) блока 106 обработки сигнала, который выполнен с возможностью приема сигнала от датчиков 402 давления, чтобы анализировать принимаемые от датчиков давления 402 сигналы и направлять исполнительный сигнал в автоматический пусковой механизм 308 на основе анализа принимаемых от датчиков 402 давления сигналов.
В осуществлении согласно фиг.4: датчики 402 давления расположены между сжимаемым уплотнительным кольцом 402 и корпусом 302 (т.е. датчики 402 давления косвенно соединены с детекторной головкой 102), и поэтому давление прижатия детекторной головки 102 к нужному месту может восприниматься датчиками 402 давления. Несмотря на то, что - только в пояснительных целях - в осуществлении согласно фиг.4 показаны только два датчика 402 давления, исполнительная система согласно осуществлениям настоящего изобретения может иметь любое соответствующее число датчиков давления любого целесообразного выполнения. Как упомянуто выше в отношении фиг.1А и 1В, наличие датчиков давления в исполнительной системе 100 позволяет определять усилие прижатия колпачка 102 давления к нужному месту.
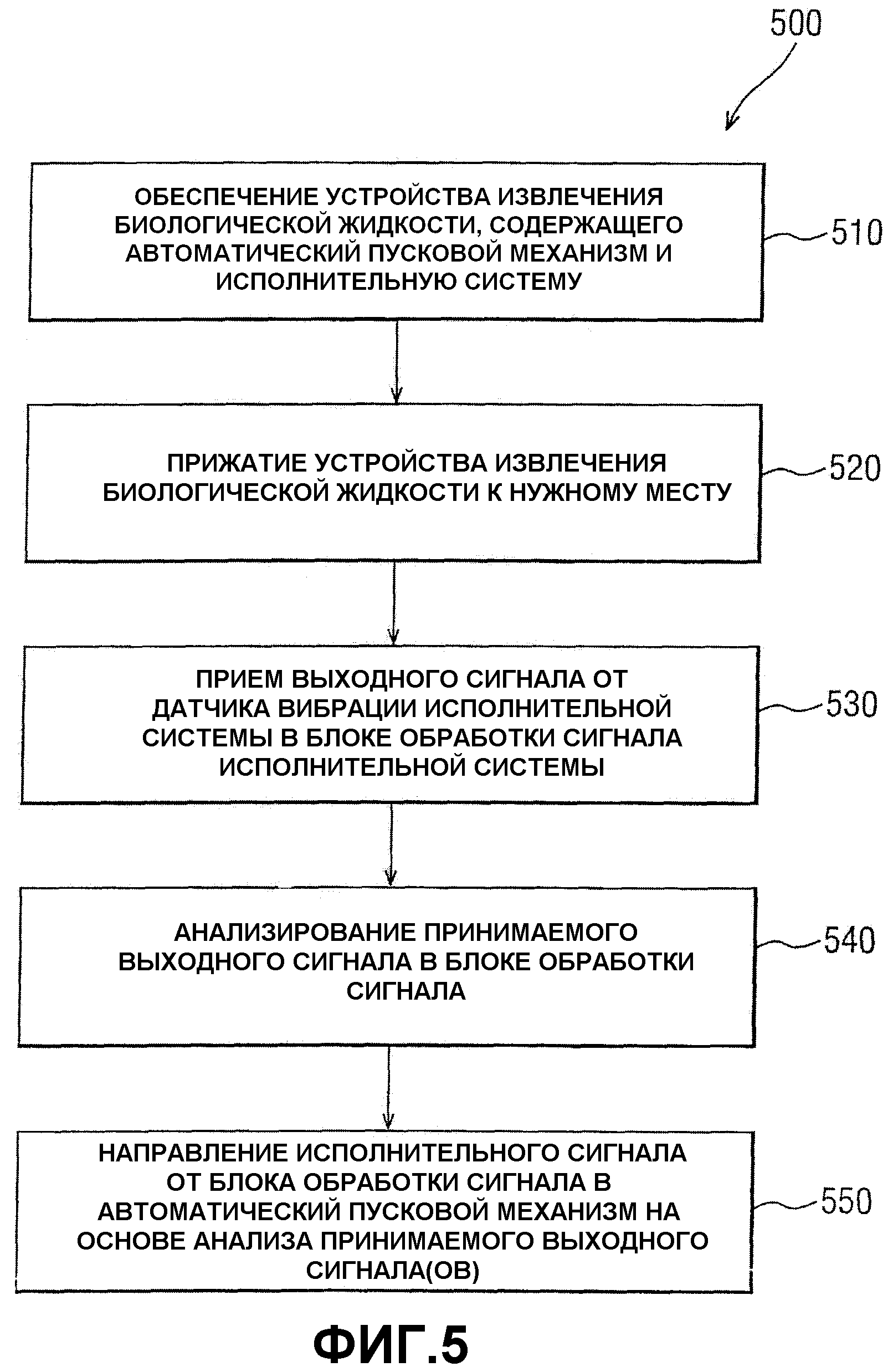
Фиг.5 показывает блок-схему последовательности этапов способа извлечения образца 500 жидкости организма согласно приводимому в качестве примера осуществлению настоящего изобретения. Способ 500 предусматривает обеспечение устройства извлечения биологической жидкости, содержащего автоматический пусковой механизм и исполнительную систему - этап 510. Исполнительная система устройства извлечения биологической жидкости содержит детекторную головку, по меньшей мере один датчик(и) вибрации, соединенный с детекторной головкой, и по меньшей мере один блок(и) обработки сигнала, связанный с датчиком(ами) вибрации. Помимо этого, блок обработки сигнала выполнен с возможностью приема выходного сигнала от каждого из датчиков вибрации для анализирования принимаемого выходного сигнала и направления исполнительного сигнала в автоматический пусковой механизм на основе анализа принимаемого выходного сигнала.
Исполнительная система устройства извлечения биологической жидкости в качестве опции может содержать по меньшей мере один датчик(и) давления, причем блок обработки сигнала выполнен с возможностью приема сигнала от датчика(ов) давления, с возможностью анализирования принимаемого от датчика давления сигнала и возможностью направления исполнительного сигнала в автоматический пусковой механизм на основе анализа и принимаемого от датчика давления сигнала, и выходного сигнала от датчика вибрации.
Устройством извлечения биологической жидкости, обеспечиваемым на этапе 510, может быть, например, устройство 300 извлечения жидкости организма согласно фиг.3; устройство 400 извлечения биологической жидкости согласно фиг.4 или любое другое устройство извлечения биологической жидкости согласно осуществлениям настоящего изобретения.
Затем устройство извлечения биологической жидкости прижимают к нужному месту (например, к нужному месту кожной ткани пальца пользователя) согласно этапу 520, указанному на фиг.5. Затем выходной сигнал от датчика(ов) давления принимается устройством обработки сигнала - этап 530.
Блок обработки сигнала затем анализирует принимаемый выходной сигнал (этап 540). Этот анализ может включать в себя анализ принимаемых сигналов, описываемых выше относительно исполнительной системы согласно фиг.1А и 1В и относительно устройства извлечения биологической жидкости согласно фиг.3. Затем исполнительный сигнал направляется в автоматический пусковой механизм от блока обработки сигнала на основе анализа принимаемого выходного сигнала - этап 550.
Если исполнительная система также включает в себя датчики давления, то этап 540 также включает в себя этап приема сигнала от каждого датчика(ов) устройством обработки сигнала. Помимо этого, этап 550 включает в себя этап использования блока обработки сигнала для анализирования сигнала, принимаемого от датчика давления; и этап 560 включает в себя этап направления исполнительного сигнала в автоматический пусковой механизм от блока обработки сигнала на основе анализов принимаемого выходного сигнала от датчика вибрации и принимаемого от датчика давления сигнала.
Поскольку способы согласно настоящему изобретению предусматривают направление исполнительного сигнала от блока обработки сигнала на основе анализа принимаемых от датчиков вибрации выходных сигналов, поэтому пользователь не может определенно предвидеть, когда таковое приведение в действие произойдет, и ему не приходится вручную приводить в действие устройство извлечения биологической жидкости. Поэтому боль и/или дискомфорт, связанные с этим ожиданием и ручным приведением устройства в действие, устранены.
Подразумевается, что в практическом применении изобретения можно использовать различные излагаемые здесь варианты его осуществлений. Объем изобретения определяет приводимая ниже его формула, которая включает в себя способы и конструкции или их эквиваленты, входящие в ее объем.
Реферат
Изобретение относится к медицине и может быть использовано при контроле концентрации глюкозы в крови. Система содержит детекторную головку, датчик вибрации, соединенный с детекторной головкой, и блок обработки сигнала, который связан с датчиком вибраций. Блок обработки сигнала выполнен с возможностью приема выходного сигнала от датчика вибрации, анализа принимаемого сигнала и направления исполнительного сигнала в устройство извлечения биологической жидкости на основе анализа принимаемого выходного сигнала при надлежащем его прижатии к месту применения. Раскрыты устройство извлечения биологической жидкости, содержащее ланцет, исполнительную систему, датчик вибрации и блок обработки сигнала, и способ приведения в действие устройства извлечения биологической жидкости, включающий операции использования блока обработки сигнала для анализа выходного сигнала, принимаемого от датчика вибрации, и направление исполнительного сигнала в автоматический пусковой механизм при надлежащем прижатии устройства к месту применения. Технический результат заключается в снижении боли и дискомфорта при получении образца биологической жидкости. 3 н. и 13 з.п. ф-лы, 5 ил.
Формула
по меньшей один датчик вибрации, соединенный с детекторной головкой; и
блок обработки сигнала, связанный с каждым, по меньшей мере, одним, датчиком вибрации, причем, блок обработки сигнала выполнен с возможностью приема выходного сигнала от каждого, по меньшей мере, одного датчика вибрации, его анализа и направления исполнительного сигнала в устройство извлечения биологической жидкости на основе анализа принимаемого выходного сигнала при надлежащем его прижатии к месту применения.
ланцет, прикрепленный к механизму ланцетного действия;
автоматический пусковой механизм; и исполнительную систему, содержащую единую комплексную детекторную головку;
по меньшей мере, один датчик вибрации, соединенный с детекторной головкой; и
блок обработки сигнала, связанный с каждым, по меньшей мере, одним датчиком вибраций, выполненный с возможностью приема выходного сигнала от каждого, по меньшей мере, одного датчика вибрации, анализа принимаемого выходного сигнала и направления исполнительного сигнала в автоматический пусковой механизм на основе анализа принимаемого сигнала при надлежащем прижатии устройства к месту применения.
по меньшей мере, один датчик вибрации, соединенный с детекторной головкой; и
блок обработки сигнала, сообщающийся с каждым, по меньшей мере, одним датчиком вибраций;
причем блок обработки сигнала выполнен с возможностью приема выходного сигнала от каждого, по меньшей мере, одного датчика вибраций, анализа принимаемого выходного сигнала и направления исполнительного сигнала в автоматический спусковой механизм на основе анализа принимаемого выходного сигнала при надлежащем прижатии устройства к месту применения, прижимают устройство извлечения жидкости организма к месту применения, принимают выходной сигнал от каждого, по меньшей мере, одного датчика вибрации блоком обработки сигнала;
используют блок обработки сигнала для анализа выходного сигнала, принимаемого от каждого, по меньшей мере, одного датчика вибрации;
направляют исполнительный сигнал в автоматический пусковой механизм от блока обработки сигнала на основе анализа, при надлежащем прижатии устройства к месту применения.
этап приема включает в себя прием сигнала от каждого, по меньшей мере, одного датчика давления в блоке обработки сигнала; и этап использования включает в себя использование блока обработки сигнала для анализа сигнала, принимаемого от каждого, по меньшей мере, одного датчика давления; и
этап направления включает в себя направление исполнительного сигнала в автоматический пусковой механизм от блока обработки сигнала на основе анализа принимаемого выходного сигнала от каждого, по меньшей мере, одного датчика вибрации, и принимаемого выходного сигнала от каждого, по меньшей мере, одного датчика давления.
Комментарии