Устройство линейного перемещения рабочего стола для позиционирования дозиметрического прибора в дозиметрической установке гамма-излучения - RU208999U1
Код документа: RU208999U1
Чертежи


Описание
Область техники, к которой относится полезная модель
Полезная модель относится к стационарным средствам метрологического обеспечения дозиметрии, в частности для поверки, калибровки, градуировки и испытаний дозиметрических приборов в коллимированном пучке гамма-излучения, а именно к устройству линейного перемещения рабочего стола для позиционирования дозиметрического прибора в дозиметрической установке гамма-излучения.
Уровень техники
Из уровня техники известно устройство линейного перемещения рабочего стола для позиционирования дозиметрического прибора в дозиметрической установке гамма-излучения УПГД-2М-Д, предназначенной для поверки дозиметров в коллимированном пучке гамма-излучения [1].
Известная из [1] установка состоит из контейнера с типовым свинцовым коллиматором гамма-излучения, барабанного механизма для хранения 4-х источников гамма-излучения, промежуточного перегрузочного контейнера, направляющих, на которых размещается тележка, установленного на тележке приборного столика для размещения поверяемых приборов в пучке излучения, механизмов перемещения и фиксации приборного столика и поверяемых приборов относительно оси пучка гамма-излучения.
Устройство линейного перемещения рабочего стола в известной из [1] установке содержит трубчатые направляющие, на которые сверху опираются колеса тележки. Путем перемещения тележки вручную по направляющим ее устанавливают на выбранном расстоянии от источника излучения, контролируя это расстояние по закрепленной на направляющих градуировочной линейке, и закрепляют фиксатором.
Наиболее близким к заявляемому устройству (прототипом) является устройство линейного перемещения рабочего стола в установке дозиметрической гамма-излучения УДГ-АТ130 [2].
Известная из [2] установка включает в себя многопозиционный облучатель, состоящий из основания и установленного на основании защитного свинцового контейнера с расположенным внутри барабаном для хранения источников гамма-излучения и подъема источников в рабочее положение, коллимационное устройство, выполненное с возможностью формирования коллимированного пучка излучения, направляющие, на которых установлена подвижная платформа с размещенным на ней рабочим столом. Рабочий стол подвижной платформы имеет возможность перемещения по вертикали, по горизонтали и вокруг вертикальной оси.
Позиционирование рабочего стола подвижной платформы по горизонтали осуществляется посредством сервопривода, при этом подвижная платформа перемещается в продольном направлении посредством колес, опирающихся сверху на направляющие.
Технической проблемой, решение которой обеспечивается при использовании полезной модели, является создание устройства линейного перемещения рабочего стола для позиционирования дозиметрического прибора в дозиметрической установке гамма-излучения, которое обеспечивало бы высокую точность позиционирования, высокую скорость и бесшумность перемещения подвижной платформы. В известных из [1] и [2] устройствах решению этой проблемы препятствовало, в частности, несовершенство конструкции подвижного опирания тележки на направляющие, допускающей поперечный люфт колес относительно направляющих, а также несовершенство средств привода тележки.
Раскрытие сущности полезной модели.
Эта техническая проблема решается в предлагаемом устройстве линейного перемещения рабочего стола для позиционирования дозиметрического прибора в дозиметрической установке гамма-излучения, содержащем: цилиндрические направляющие; снабженную рабочим столом подвижную платформу, установленную на цилиндрических направляющих при помощи линейных шарикоподшипниковых опор; и двигатель со встроенным редуктором и оптическим датчиком положения, неподвижно расположенный в основании цилиндрических направляющих для перемещения подвижной платформы при помощи зубчатого ремня.
Предлагаемое устройство расширяет арсенал технических средств позиционирования дозиметрических приборов в дозиметрических установках гамма-излучения, отличаясь от своих аналогов высокой точностью позиционирования подвижной платформы, а также высокой скоростью ее перемещения.
Технический результат, обеспечиваемый полезной моделью и заключающийся в обеспечении высокой точности позиционирования и высокой скорости перемещения подвижной платформы, достигается, во-первых, за счет установки подвижной платформы на цилиндрических направляющих при помощи линейных шарикоподшипниковых опор, что не только обеспечивает плавность и бесшумность хода подвижной платформы, но и жестко ограничивает подвижность платформы единственной поступательной степенью свободы, исключая возможность раскачки и наклона подвижной платформы, что, в свою очередь, позволяет точно позиционировать платформу, а также энергичнее воздействовать на нее для ее перемещения. Во-вторых, применение двигателя со встроенным редуктором, неподвижно расположенного в основании цилиндрических направляющих, позволяет избежать увеличения массы и инерционности самой подвижной платформы, что дает возможность сообщать платформе бóльшие положительные и отрицательные ускорения без ущерба для точности позиционирования. В-третьих, перемещение подвижной платформы посредством зубчатого ремня также позволяет сообщать платформе бóльшие ускорения и останавливать ее в заданном положении без опасности проскальзывания зубчатого ремня на шкивах. В-четвертых, высокая точность и скорость позиционирования подвижной платформы обеспечивается применением оптического датчика положения, что позволяет по сигналам датчика непрерывно отслеживать текущее положение платформы и удерживать ее в точно заданном положении.
В предпочтительном случае осуществления полезной модели цилиндрические направляющие установлены для обеспечения продольного перемещения подвижной платформы с рабочим столом вдоль оси излучения источника дозиметрической установки, что позволяет позиционировать дозиметрический прибор на разных расстояниях от источника излучения для изменения мощности дозы, не корректируя положение прибора на рабочем столе.
Рабочий стол может быть размещен на подвижной платформе посредством каретки, установленной с возможностью поперечного перемещения на направляющих. Перемещение каретки может осуществляться вручную и может использоваться как установочное при выставке рабочего стола относительно оси излучения.
Для расширения возможностей регулировки положения дозиметрического прибора относительно источника излучения рабочий стол установлен на каретке с возможностью вертикального перемещения и поворота вокруг вертикальной оси. В этом случае возможность вертикального перемещения рабочего стола может быть обеспечена посредством ручного винтового домкрата, на валу которого расположен рабочий стол, а возможность поворота рабочего стола вокруг вертикальной оси – посредством дистанционно управляемого электропривода с оптическим датчиком для контроля угла поворота рабочего стола. Механизм поворота рабочего стола с использованием электропривода обеспечивает возможность дистанционного автоматического поворота на 360° с дискретностью угла поворота 1° для облучения дозиметрического прибора под заданным углом.
Дополнительно рабочий стол может быть снабжен подвижным столиком для размещения дозиметрического прибора и обеспечения точного позиционирования его центра по центру рабочего стола. Подвижный столик перемещается вдоль рабочего стола по направляющим, установленным на рабочем столе. Такой подвижный столик, в частности при его использовании одновременно с использованием лазерного нивелира, упрощает выставку центра детектора дозиметрического прибора на рабочем столе. Лазерный нивелир может устанавливаться на стойке, закрепленной на подвижной платформе. Лазерный нивелир может использоваться совместно с лазерным патроном, размещаемым в технологической пробке и устанавливаемым в отверстие коллиматора многопозиционного облучателя для имитации центра излучения от излучателя.
Зубчатый ремень может быть выполнен из полиуретана и армирован стальными тросами. Стальные тросы препятствуют вытяжке зубчатого ремня, что способствует сохранению высокой точности позиционирования подвижной платформы на протяжении длительной эксплуатации. Применение полиуретана снижает шумность работы привода.
Цилиндрические направляющие могут быть выполнены составными из стали и обработаны в сборе, что позволяет устранить возможные уступы на поверхности направляющих в местах соединения их секций, что еще более повышает плавность и бесшумность хода подвижной платформы.
Краткое описание чертежей
Полезная модель поясняется фигурами:
Фиг. 1 – общий вид дозиметрической установки, включающей предлагаемое устройство линейного перемещения рабочего стола;
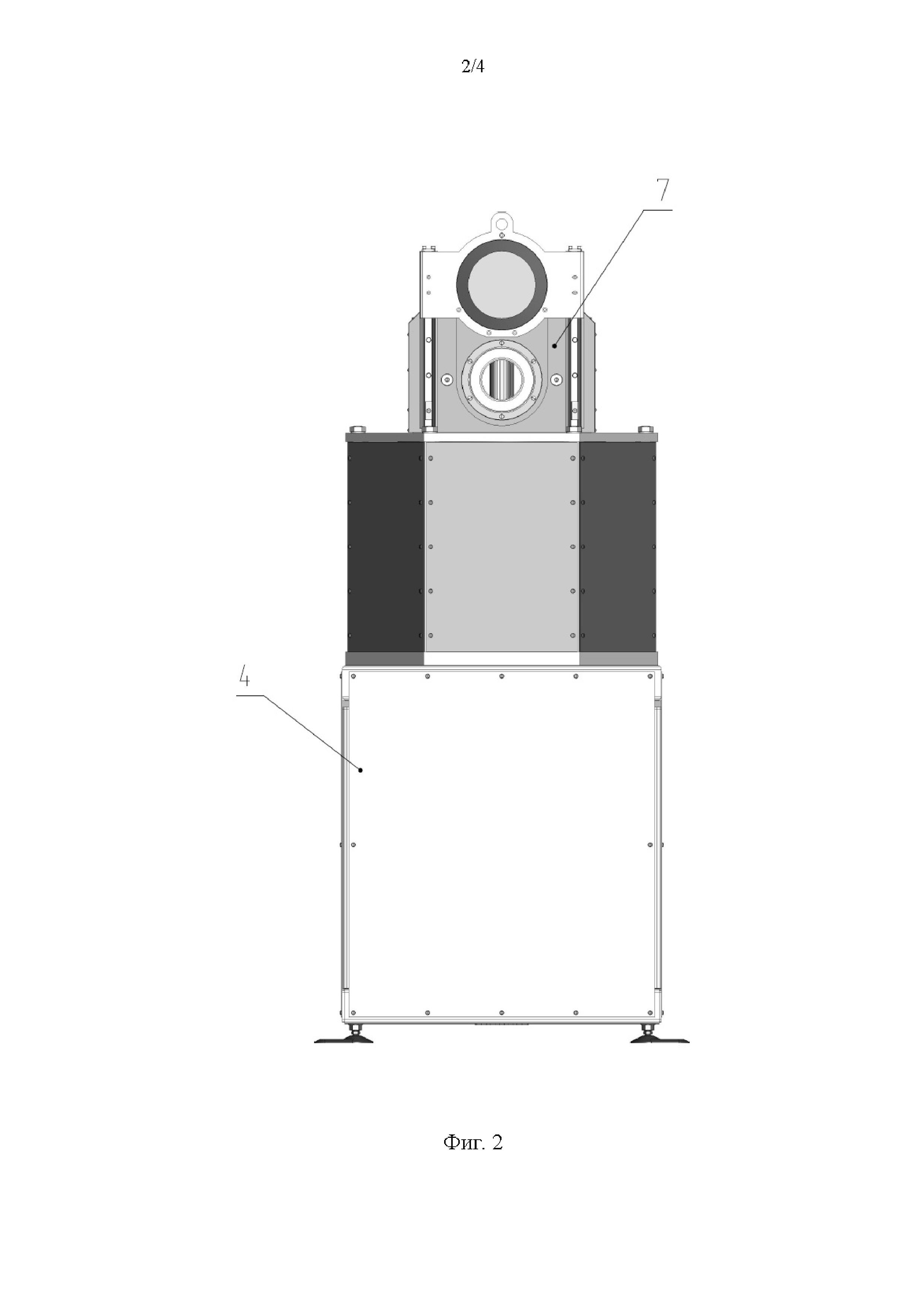
Фиг. 2 – общий вид многопозиционного облучателя, используемого вместе с предлагаемым устройством линейного перемещения рабочего стола в составе дозиметрической установки;
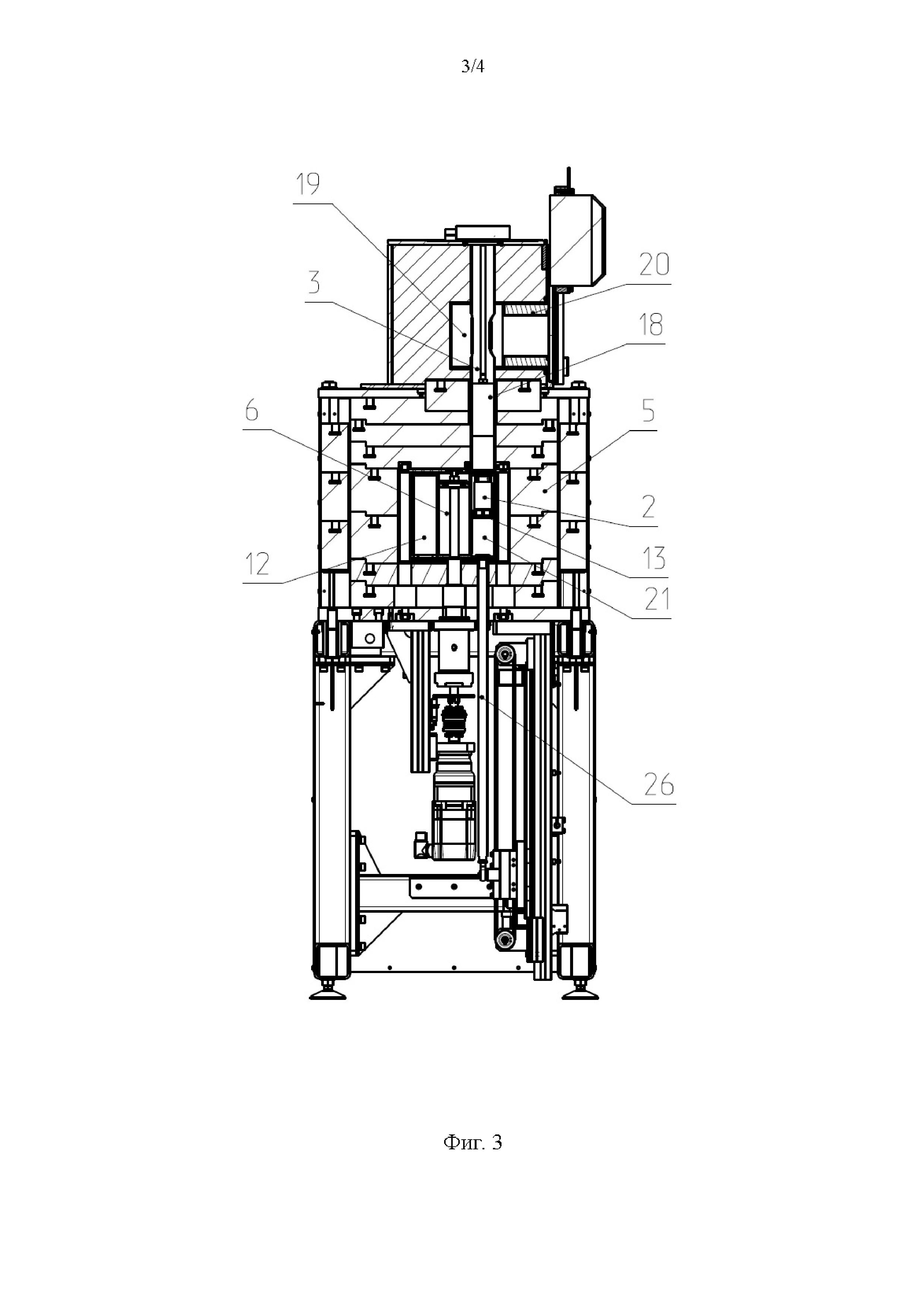
Фиг. 3 – фронтальный разрез многопозиционного облучателя;
Фиг. 4 – общий вид предлагаемого устройства линейного перемещения рабочего стола.
Осуществление полезной модели
Установка дозиметрическая гамма-излучения включает многопозиционный облучатель (1), обеспечивающий безопасное хранение и последовательный подъем источников (2) гамма-излучения из позиции хранения в рабочую позицию по вертикальному каналу (3) подъема для создания коллимированного пучка гамма-излучения. Многопозиционный облучатель (1) состоит из основания (4) с размещенными внутри и обеспечивающими работу многопозиционного облучателя (1) приводами. На основании (4) установлен свинцовый защитный контейнер (5) с расположенным внутри барабаном (6) для хранения источников (2) гамма-излучения. На свинцовом защитном контейнере (5) установлено коллимационное устройство (7). Установка дозиметрическая гамма-излучения также включает устройство (8) линейного перемещения рабочего стола (9), которое состоит из механизма продольного перемещения, снабженного цилиндрическими направляющими (10), на которых установлена подвижная платформа (11) с возможностью перемещения вдоль оси излучения Х. Барабан (6) имеет шесть равномерно расположенных по окружности гнезд (12) для хранения источников (2) гамма-излучения, помещенных в пробки-держатели (13). На подвижной платформе (11) установлен механизм поперечного перемещения, снабженный направляющими (14), на которых установлена каретка (15), с размещенными на ней механизмом вертикального перемещения рабочего стола (9), выполненным с возможностью перемещения вверх/вниз посредством ручного винтового домкрата (16), и механизмом поворота рабочего стола, выполненным с использованием электропривода и 5 возможностью дистанционного автоматического поворота на 360° с дискретностью угла поворота 1°. На рабочем столе (9) установлен подвижный столик (17) для размещения поверяемых приборов. Многопозиционный облучатель (1) снабжен свинцовой или вольфрамовой пробкой (18). В рабочей позиции источник (2) гамма-излучения находится в камере (19) коллиматора.
Каждая пробка-держатель (13) снабжена вольфрамовой или свинцовой пробкой (21). Подвижная платформа (11) устройства (8) линейного перемещения рабочего стола (9) движется по цилиндрическим направляющим (10) механизма продольного перемещения рабочего стола (9) при помощи линейных шарикоподшипниковых опор (22). Движение подвижной платформы (11) устройства (8) линейного перемещения рабочего стола (9) осуществляется при помощи зубчатого ремня (23) и двигателя (24), расположенного неподвижно в основании цилиндрических направляющих (10) механизма продольного перемещения рабочего стола (9).
Система лазерной юстировки включает размещенный в технологической пробке лазерный патрон с возможностью установки в отверстие коллиматора, и лазерный нивелир (25), установленный на стойке, закрепленной на подвижной платформе.
Установка размещается в специально оборудованном помещении, обеспечивающем защиту обслуживающего персонала от воздействия гамма-излучения, а именно в двух смежных помещениях: в рабочей камере и в комнате управления. Вход в рабочую камеру осуществляется из комнаты управления через лабиринт и входную дверь, снабженную элементами системы сигнализации и блокировки. В рабочей камере размещается установка дозиметрическая гамма-излучения и камеры видеонаблюдения, а в комнате управления – пульт управления, станция управления, мониторы и т.д.
Несущей конструкцией многопозиционного облучателя (1) является сборное основание (4), состоящее из частей, что позволяет заносить его в разобранном виде в рабочую камеру через узкие проходы и собирать по месту установки. Ноги основания (4) выполнены с возможностью регулировки по высоте. На основании (4) устанавливаются свинцовый защитный контейнер (5) и коллимационное устройство (7). Внутри защитного свинцового контейнера (5) установлен барабан (6), в котором находятся пробки-держатели (13) с источниками (2) гамма-излучения, которые размещены в гнездах (12). Коллимационное устройство (7) многопозиционного облучателя (1) предназначено для формирования коллимированного пучка излучения, создаваемого источниками (2) гамма-излучения, размещенными в камере перед каналом коллиматора (20) и представляет собой сборную конструкцию, основой которого является цилиндрическая конструкция, изготовленная из труб разных диаметров. Горизонтально расположенная труба является камерой (19) коллиматора (20). Через камеру (19) коллиматора (20) проходит вертикально расположенный цилиндрический канал подачи источника (2) в камеру (19) коллиматора (20). В горизонтальной трубе размещаются сменные коллиматоры (20). Пространство между наружным корпусом коллимационного устройства (7) и каналами залито свинцом. Толщина свинца от центра источника (2) гамма-излучения, расположенного в камере (19) коллиматора (20) во всех направлениях (кроме канала коллиматора) не менее 130 мм. Конструкция установки позволяет использовать три типа коллиматоров (20), а именно:
цилиндрические коллиматоры с диаметрами 60 мм и длиной 150 мм, конструкция которых соответствует требованиям ГОСТ 8.087-2000;
цилиндрические коллиматоры диаметрами 90 мм и длиной 150 мм, конструкция которых соответствует требованиям ГОСТ 8.087-2000;
конические коллиматоры диаметром со стороны источника 60 мм, конструкция которого соответствует требованиям СТБ ISO 4037-1-2014.
Цилиндрические коллиматоры диаметром 60 мм устанавливается в канал коллиматора диаметром 90 мм.
В основании (4) многопозиционного облучателя (1) размещены приводы поворота барабана (6), которые обеспечивают выбор заданного источника (2) гамма-излучения и подъем его по вертикальному каналу (3) подъема из позиции хранения в рабочую позицию. Многопозиционный облучатель (1) снабжен свинцовой или вольфрамовой пробкой (18). Указанная пробка (18) не имеет привода и при перемещении источников (2) из позиции хранения в рабочую позицию поднимается в верхнее положение под воздействием пробки-держателя (13) с источником (2). В нижнее положение пробка (18) опускается под действием собственного веса вслед за опускающейся пробкой-держателем (13) источника (2), перекрывая тем самым гамма-излучение, исходящее от источников (2) гамма-излучения, находящихся в позиции хранения в свинцовом защитном контейнере (5) многопозиционного облучателя (1).
Подъем источника (2) гамма-излучения осуществляется штоком (26), который при движении вверх упирается в пробку-держатель (13) источника (2) и поднимает ее вверх.
Привод штока (26) состоит из трехфазного асинхронного электродвигателя с редуктором и встроенным электромагнитным тормозом, электромагнитной муфты и зубчатого ремня (23) со шкивами.
При подаче напряжения на электромагнитную муфту происходит сцепление вала ведущего зубчатого шкива с электродвигателем. В нормальном рабочем состоянии напряжение на электромагнитную муфту подается постоянно. При подаче напряжения на электродвигатель он автоматически растормаживается, начинает вращаться и, через электромагнитную муфту, приводит во вращение ведущий шкив зубчатого ремня. Концы зубчатого ремня закреплены к каретке, которая движется по направляющим. На каретке закреплен шток (26). После отключения электродвигателя электромагнитный тормоз затормаживает ротор электродвигателя, что приводит к остановке штока (26) в нужном положении.
Электромагнитная муфта при отключении питания отсоединяет электродвигатель от вала зубчатого шкива, что обеспечивает свободное вращение шкива. При этом шток (26), пробка-держатель (13) с источником (2) гамма-излучения и пробка (18) облучателя (1) опускаются в нижнее положение под действием собственного веса, автоматически закрывая вертикальный канал (3) подъема многопозиционного облучателя (1). В случае аварийного опускания штока (26) его торможение и остановка в нижнем положении обеспечивается специальным пневматическим амортизатором. Амортизатор используется только при аварийном опускании штока.
Конструкция многопозиционного облучателя (1) позволяет визуально наблюдать за положением источника (2) гамма-излучения при его перемещении по вертикальному каналу (3) подъема из позиции хранения в рабочую позицию и обратно. Система управления установки всегда имеет точную информацию о положении источника (2) гамма-излучения в многопозиционнном облучателе (1), что гарантирует безопасную эксплуатацию установки.
Установка дозиметрическая гамма-излучения снабжена устройством (8) линейного перемещения рабочего стола (9) и имеет три оси перемещения рабочего стола – перемещение вдоль оси излучения, перемещение поперек оси 5 излучения в горизонтальной плоскости, перемещение поперек оси излучения в вертикальной плоскости, а также осуществляет повороты рабочего стола (9) вокруг вертикальной оси. Устройство (8) линейного перемещения рабочего стола (9) состоит из механизма продольного перемещения, механизма поперечного перемещения и механизма вертикального перемещения.
Механизм продольного перемещения рабочего стола представляет собой подвижную платформу (11), которая установлена на четырех шарикоподшипниковых опорах (22) и перемещается вдоль оси излучения Х по цилиндрическим направляющим (10), закрепленным на стойках основания (4). Цилиндрические направляющие (10) выполнены составными из стали и обрабатываются в сборе с высокой точностью. Применение линейных шарикоподшипниковых опор и высокоточных линейных цилиндрических направляющих (10) обеспечивают высокую точность позиционирования подвижной платформы (11) по оси Х. Подвижная платформа (11), с установленным на ней рабочим столом (9), приводится в движение серводвигателем со встроенным редуктором и оптическим датчиком положения, посредством полиуретанового зубчатого ремня (23), армированного стальными тросами.
Применение линейных цилиндрических направляющих (10), шарикоподшипниковых опор (22) и зубчатого ремня (23) обеспечивают высокую точность позиционирования, высокую скорость и бесшумность перемещения подвижной платформы (11).
На подвижной платформе (11) размещена каретка (15), которая перемещается в горизонтальной плоскости поперек оси излучения по направляющим (14) механизма поперечного перемещения, выполненным из специального алюминиевого профиля. Перемещение каретки (15) осуществляется вручную. Оно используется как установочное при выставке рабочего стола (9) относительно оси излучения, после чего фиксируется специальным винтовым зажимом.
На каретке (15) установлен механизм вертикального перемещения рабочего стола (9), который позволяет устанавливать центр детектора проверяемого прибора или кассеты с приборами по центру оси облучения, и механизм поворота рабочего стола (9). Рабочий стол (9) имеет возможность поворота на 360°, что позволяет проводить облучение приборов со всех сторон в горизонтальной плоскости без переустановки приборов на рабочем столе. Заданное и текущее положение рабочего стола (9) отображаются на дисплее пульта управления. Рабочий стол (9) расположен на валу ручного винтового домкрата (16).
Подвижная платформа (11) с установленными на ней механизмами приводится в движение серводвигателем со встроенным редуктором и оптическим датчиком положения посредством зубчатого ремня.
Устройство (8) линейного перемещения рабочего стола (9) имеет электромеханический привод поворота рабочего стола (9) вокруг вертикальной оси Z, который осуществляется трехфазным асинхронным двигателем с редуктором. Дискретность позиционирования составляет 1°, контроль угла поворота осуществляется с помощью оптического датчика, установленного на валу оси поворота рабочего стола (9). Рабочий стол (9) имеет возможность поворота на 360°, что позволяет проводить облучение приборов со всех сторон в горизонтальной плоскости без переустановки приборов на рабочем столе (9) дистанционно, не заходя в рабочую камеру, и автоматизировать этот процесс.
Проверяемые приборы устанавливаются на рабочий стол (9) в специальные групповые кассеты или индивидуально.
Центр детектора поверяемых приборов располагается по оси излучения Х многопозиционного облучателя (1) и ориентирован относительно центра рабочего стола (9) в плоскости перпендикулярной оси излучения Х. Для точной установки приборов на рабочем столе (9) относительно оси излучения Х и центра рабочего стола (9) используется система лазерной юстировки, включающая лазерный нивелир (25). После установки приборов на рабочем столе (9) оператор выходит из рабочей камеры, закрывает двери рабочей камеры со специального пульта, установленного возле входной двери. Управление выбором источника (2) гамма-излучения, выводом выбранного источника (2) гамма-излучения в рабочую позицию и позиционированием проверяемого прибора в коллимированном пучке гамма-излучения установки осуществляется оператором с пульта управления, который расположен в комнате оператора.
Дальнейшие действия по облучению проверяемых приборов осуществляются дистанционно из комнаты оператора.
На пульте управления установки задается необходимое расстояние от центра источника (2) гамма-излучения до центра рабочего стола (9) и выбирается источник (2) гамма-излучения для создания необходимой мощности дозы гамма-излучения. Перемещение рабочего стола (9) в нужную точку и подъем выбранного источника (2) гамма-излучения в рабочую позицию могут происходить последовательно или параллельно. После перемещения источника (2) гамма-излучения в рабочую позицию начинается облучение поверяемого прибора.
Управление облучением поверяемого прибора может осуществляться с автоматизированного рабочего места оператора при помощи специальной метрологической программы "PM9100 Metrological Workstation". В этом случае процесс калибровки может происходить полностью в автоматическом режиме. Оператор создает в специальном окне программы сценарий прохождения процедуры калибровки. Устанавливает прибор (или кассету с приборами) на рабочем столе (9) и запускает программу. Программа выбирает нужный источник (2) гамма-излучения, рассчитывает расстояния по оси излучения Х и выдает команды для выполнения необходимых действий механизмами установки.
Установка относится к стационарным средствам измерений и предназначена для поверки, калибровки, градуировки и испытаний в коллимированном пучке гамма-излучения (создаваемых эталонными источниками 241Am, 137Cs, 60Co и других) средств измерений экспозиционной дозы и мощности экспозиционной дозы, кермы и мощности кермы в воздухе, амбиентного эквивалента дозы и мощности амбиентного эквивалента дозы, индивидуального эквивалента дозы и мощности индивидуального эквивалента дозы.
Радиационное воздействие на персонал и население при эксплуатации, неисправности или аварии установки ограничивается рабочей камерой.
В установке реализуется схема облучения с одним многопозиционным облучателем (1) и линейно-позиционируемой подвижной платформой (11) системы (8) линейного перемещения. Изменение значений дозиметрических величин, воспроизводимых в установке дозиметрической гамма-излучения, достигается применением источников (2) гамма-излучения различной активности и изменением расстояния между источником (2) гамма-излучения и детектором в интервале рабочих расстояний установки.
Управление выбором источника (2) гамма-излучения в барабане (6) многопозиционного облучателя (1), выводом выбранного источника (2) гамма-излучения в рабочую позицию и позиционированием проверяемого прибора в пучке излучения осуществляется оператором дистанционно с пульта управления установки или при помощи специального метрологического программного обеспечения, установленного на персональном компьютере.
Расширение функциональных возможностей установки дозиметрической гамма-излучения обеспечивается, в частности, расширением размерной линейки и диапазона поверяемых приборов, повышением точности их калибровки, а также более высоким уровнем автоматизации процессов калибровки. Указанный технический результат достигается за счет возможности осуществлять регулировку и точную установку поверяемых приборов в коллимированном пучке, повышения точности позиционирования подвижной платформы, возможности дистанционного автоматического поворота рабочего стола, а также за счет использования шести источников гамма-излучения и трех типов цилиндрических коллиматоров. Расширение функциональных возможностей установки включает и повышение уровня радиационной безопасности, которое обеспечивается за счет конструкции многопозиционного облучателя, снабженного свинцовой или вольфрамовой пробкой, выполненной с возможностью перемещения по вертикальному каналу подъема и закрывания указанного канала подъема при опускании источника гамма-излучения, а также за счет того, что каждая пробка-держатель снабжена вольфрамовой или свинцовой пробкой, которая при нахождении источника гамма-излучения в рабочей позиции закрывает вертикальный канал подъема от рассеянного излучения, идущего от источников, находящихся в позиции хранения.
Источники информации
1. http://www.doza.ru/docs/radiation_control/upgd_2md.pdf.
2. https://atomtex.com/sites/default/files/datasheets/_udg-at130_0.pdf.
Реферат
Полезная модель относится к устройству линейного перемещения рабочего стола для позиционирования дозиметрического прибора в дозиметрической установке гамма-излучения, содержащему цилиндрические направляющие, снабженную рабочим столом подвижную платформу, установленную на цилиндрических направляющих при помощи линейных шарикоподшипниковых опор, и двигатель со встроенным редуктором и оптическим датчиком положения, неподвижно расположенный в основании цилиндрических направляющих для перемещения подвижной платформы при помощи зубчатого ремня. Полезная модель обеспечивает высокую точность позиционирования, высокую скорость и бесшумность перемещения подвижной платформы. 4 ил.

Комментарии