Летательный аппарат и способ стабилизации летательного аппарата - RU2724937C2
Код документа: RU2724937C2
Чертежи


Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к летательному аппарату. Также оно относится к способу, используемому летательным аппаратом.
Такой летательный аппарат или способ позволяет стабилизировать летательный аппарат, подверженный изменениям ветра, таким как порывы или турбулентность. Более конкретно, но не ограничиваясь, настоящее изобретение относится к области летательных аппаратов легче воздуха.
Уровень техники
Стабильность полета в турбулентной среде (в частности, для повышения комфорта пассажиров) является повторяющейся темой в авиационном мире.
Обнаружение и прогнозирование порывов ветра являются важнейшими элементами соблюдения плана полета летательного аппарата. Все это приобретает еще большее значение для летательного аппарата легче воздуха, учитывая его большое аэродинамическое сопротивление и относительно низкую маневренность из-за его инерции.
Из уровня техники известно несколько решений для обнаружения или прогнозирования таких порывов для летательного аппарата:
- технологии «пилотирования», которые основаны на действиях пилота или пилотов, которые следуют собранной информации, отображаемой в кабине летательного аппарата;
- технологии «предупреждения», которые основаны на обнаружении турбулентности и позволяют предупреждать пассажиров о вхождении в зону турбулентности;
- технологии «поглощения», которые основаны на механических системах (поглотителях порывов ветра), позволяющих стабилизировать полет.
При этом возникает несколько проблем:
- время реакции: значения времени реакции могут быть слишком большими по отношению к внезапному появлению шквалов или порывов или турбулентности (в частности, для технологий «пилотирования»);
- полет в режиме висения или направление полета: некоторые технологии (в частности, технология «поглощения») являются, как правило, не эффективными при полете в режиме висения, но эффективными только при крейсерском режиме полета на высоких скоростях, и, кроме того, их действие делает стабилизацию возможной только в направлении полета;
- возникает опасность во время полета в режиме висения: во время фаз загрузки/разгрузки при полете в режиме висения летательный аппарат легче воздуха является чрезвычайно уязвимым для турбулентного ветра. Воздействие порывов может фактически вызывать серьезную неустойчивость, приводящую в крайних случаях к возникновению угрозы для безопасности летательного аппарата легче воздуха;
- точность полета в режиме висения: в случае позиционирования груза может быть очень важной точность полета в режиме висения. Порывы могут привести к значительному ухудшению этой точности в ущерб его эксплуатационным возможностям.
Задача настоящего изобретения состоит в устранении по меньшей мере одной из вышеупомянутых проблем или одного из вышеупомянутых недостатков.
Раскрытие изобретения
Эта задача решена посредством летательного аппарата, содержащего:
- по меньшей мере один датчик, выполненный с возможностью измерения параметров ветра;
- исполнительные механизмы;
- бортовую базу данных на летательном аппарате, причем база данных сопоставляет различные измеренные значения параметров ветра с различными командами, предназначенными для исполнительных механизмов;
- средство анализа и управления, выполненное или запрограммированное с возможностью:
приёма измеренных значений параметров ветра, поступающих по меньшей мере от одного датчика,
поиска в базе данных совпадений с измеренными значениями параметров ветра, поступающими по меньшей мере от одного датчика, и определения, в зависимости от этого поиска, команд, которые необходимо передать на исполнительные механизмы,
передачи этих определенных команд на исполнительные механизмы.
По меньшей мере один датчик предпочтительно выполнен с возможностью измерения параметров ветра с частотой измерений по меньшей мере 0,1 Гц, предпочтительно по меньшей мере 1 Гц. Средство анализа и управления предпочтительно выполнено или запрограммировано с возможностью определения команд, которые необходимо передать на исполнительные механизмы, с частотой по меньшей мере 0,1 Гц, предпочтительно по меньшей мере 1 Гц.
Летательный аппарат согласно изобретению предпочтительно выполнен с возможностью выполнять полет в режиме висения.
Летательный аппарат согласно изобретению предпочтительно представляет собой летательный аппарат легче воздуха.
По меньшей мере один датчик предпочтительно выполнен с возможностью дистанционного измерения параметров ветра.
Измеренные значения параметров ветра могут содержать:
- амплитуду или изменение амплитуды ветра, и/или
- источник или направление ветра или изменение источника или направления ветра.
Средство анализа и управления может быть выполнено или запрограммировано с возможностью передачи команд непосредственно на исполнительные механизмы, без необходимости выполнения этапа утверждения или подтверждения оператором-человеком.
Летательный аппарат согласно изобретению может также содержать средство для измерения воздействий на положение летательного аппарата определенных команд, которые затем передаются на исполнительные механизмы. В этом случае средство анализа и управления может также быть выполнено или запрограммировано с возможностью изменения базы данных в зависимости от измеренных воздействий.
Исполнительные механизмы могут содержать средство приведения в движение летательного аппарата и/или поверхности управления летательного аппарата.
По меньшей мере один датчик предпочтительно выполнен с возможностью измерения параметров ветра в нескольких направлениях или от нескольких источников.
Согласно еще одному аспекту изобретения, предложен способ стабилизации летательного аппарата (предпочтительно используемый на летательном аппарате согласно изобретению), содержащий:
- измерение параметров ветра по меньшей мере одним датчиком летательного аппарата
- анализ и управление посредством бортового средства анализа и управления на летательном аппарате, содержащие:
прием измеренных значений параметров ветра, поступающих по меньшей мере от одного датчика;
поиск в бортовой базе данных на летательном аппарате, которая сопоставляет различные измеренные значения параметров ветра с различными командами, предназначенными для исполнительных механизмов летательного аппарата, совпадений с измеренными значениями параметров ветра, поступающими по меньшей мере от одного датчика;
определение, в зависимости от этого поиска, команд, которые необходимо передать на исполнительные механизмы;
передачу этих определенных команд на исполнительные механизмы.
По меньшей мере один датчик предпочтительно измеряет параметры ветра с частотой измерений по меньшей мере 0,1 Гц, предпочтительно по меньшей мере 1 Гц. Средство анализа и управления предпочтительно определяет команды, которые необходимо передать на исполнительные механизмы, с частотой по меньшей мере 0,1 Гц, предпочтительно по меньшей мере 1 Гц.
При осуществлении этого способа согласно изобретению летательный аппарат может выполнять полет в режиме висения.
Летательный аппарат согласно изобретению является предпочтительно летательным аппаратом легче воздуха.
По меньшей мере один датчик предпочтительно дистанционно измеряет параметры ветра.
Измеренные значения параметров ветра могут содержать:
- амплитуду или изменение амплитуды ветра, и/или
- источник или направление ветра или изменение источника или направления ветра.
Средство анализа и управления предпочтительно передаёт команды непосредственно на исполнительные механизмы без необходимости выполнения этапа утверждения или подтверждения оператором-человеком.
Способ согласно изобретению может также содержать измерение воздействий на положение летательного аппарата определенных команд, которые затем передаются на исполнительные механизмы. В этом случае способ согласно изобретению может также содержать изменение базы данных посредством средства управления и анализа в зависимости от измеренных воздействий.
Исполнительные механизмы могут содержать средство приведения в движение летательного аппарата и/или поверхности управления летательного аппарата.
По меньшей мере один датчик может измерять параметры ветра в нескольких направлениях или от нескольких источников.
Краткое описание чертежей
Другие преимущества и характеристики изобретения станут очевидными при рассмотрении подробного описания применений и вариантов осуществления, которые никоим образом не являются ограничительными, и прилагаемых чертежей, на которых:
фиг.1a - схематичный вид сверху первого варианта осуществления летательного аппарата 1 согласно изобретению;
фиг.1b - схематичный вид сбоку первого варианта осуществления летательного аппарата 1 согласно изобретению;
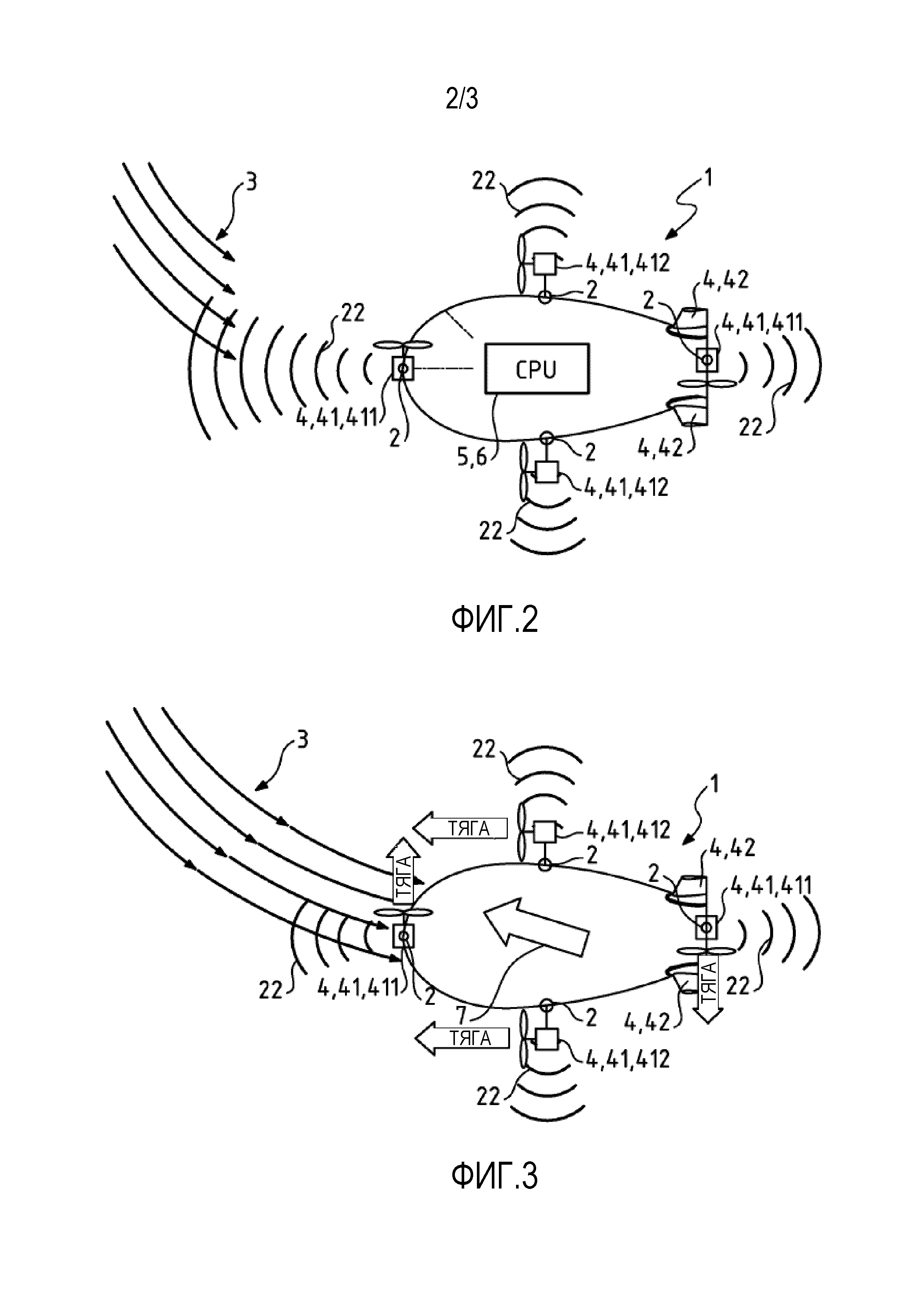
фиг.2 - схематичный вид сверху летательного аппарата 1 согласно изобретению, в направлении которого направлен порыв ветра 3;
фиг.3 - схематичный вид сверху летательного аппарата 1 согласно изобретению, компенсирующего воздействия этого ветра 3; и
фиг.4 - схематичное представление способа согласно изобретению, используемого на летательном аппарате 1.
Осуществление изобретения
Так как эти варианты осуществления никоим образом не являются ограничивающими, варианты изобретения можно рассматривать как содержащие только выбор характеристик, описанных или показанных в дальнейшем, в отрыве от других описанных или показанных характеристик (даже если этот выбор обособлен в пределах фразы, содержащей эти другие характеристики), если этот выбор характеристик является достаточным для обеспечения технического преимущества или для разграничения изобретения по отношению к уровню техники. Этот выбор содержит по меньшей мере одну, предпочтительно функциональную, характеристику без элементов конструкции и/или только часть элементов конструкции, если эта часть сама по себе является достаточной для обеспечения технического преимущества или для разграничения изобретения по отношению к уровню техники.
Сначала, со ссылкой на фиг.1a, 1b, 2, 3 и 4, будет описан первый вариант осуществления летательного аппарата 1 согласно изобретению.
В настоящем описании термин «летательный аппарат» означает любое средство транспортировки (людей или грузов), способное перемещаться путем полета.
Летательный аппарат 1 выполнен с возможностью выполнения полета в режиме висения. Под этим понимается, что летательный аппарат 1 способен (при отсутствии ветра) выполнять полет в фиксированном положении по отношению к земле, как это происходит в случае дирижабля или вертолета.
Более конкретно, летательный аппарат 1 состоит из летательного аппарата легче воздуха.
В настоящем описании термин «летательный аппарат легче воздуха» означает летательный аппарат, подъемная сила которого создается за счет аэростатической подъемной силы (в отличие от летательного аппарата тяжелее воздуха), такое, например, как воздушный шар с гондолой или дирижабль.
средство, подъемная сила которого создается за счет газа, который легче атмосферного воздуха, окружающего его, то есть воздушный шар или дирижабль) является дирижаблем, предназначенным для доставки грузов.
В этом неограничивающем примере используемый летательный аппарат 1 легче воздуха представляет собой дирижабль, имеющий длину 70 м и объем гелия, равный 6000 м3. Летательный аппарат 1 легче воздуха перемещается горизонтально с помощью четырех двигателей 41 (электродвигателей или тепловых двигателей), размещенных с интервалами 90° по окружности летательного аппарата 1 легче воздуха (предпочтительно по существу в горизонтальной плоскости, параллельной плоскости фиг.1a, 2 и 3), включающего в себя:
- два передних/задних двигателя 41, 411, которые имеют реверсивное направление движения, и
- два боковых двигателя 41, 412, которые имеют изменяемое направление или ориентацию вектора тяги (которые осуществляют как вертикальное движение вверх или вниз и горизонтальное движение вперед или назад), и которые также имеют реверсивное направление движения.
Например, двигатели 41 представляют собой тепловые двигатели типа FR305-230E, производимые компанией SMA, оборудованные соосными винтами противоположного вращения и мощностью двигателя P=160 кВт.
Для того, чтобы обеспечить достаточно точное позиционирование переносимой нагрузки, летательный аппарат 1 оснащен активной системой стабилизации полета летательного аппарата 1 (содержащей средства 2, 4, 5 и 6, которые описаны ниже), которая является эффективной в турбулентной среде и при полете в режиме висения. Система стабилизации позволяет предугадать на основании дистанционного измерения (скорости и интенсивности) ветра реакцию поведения летательного аппарата 1 во всех направлениях и, таким образом, привести в действие исполнительные механизмы 4 для обеспечения его устойчивости.
Летательный аппарат 1 содержит по меньшей мере один датчик 2, выполненный с возможностью измерения параметров ветра 3. Под ветром 3 в настоящем описании подразумевается любое движение воздуха (предпочтительно по направлению к летательному аппарату 1), предпочтительно содержащее одну или более турбулентностей, и/или один или более порывов и/или один или более шквальных ветров.
По меньшей мере один датчик 2 выполнен с возможностью дистанционного измерения параметров ветра 3 (путем передачи сигнала 22), то есть прежде, чем этот ветер 3 войдет в контакт с летательным аппаратом 1. Таким образом, каждый датчик 2 может содержать один или более лидаров (устройств для обнаружения и определения дальности с помощью света (LIDAR)) (технология дистанционного измерения, основанная на анализе свойств луча света, отраженного обратно в сторону излучателя) и/или один или более содаров (устройств для обнаружения и определения дальности с помощью звука (SODAR)) (датчик, который использует звуковые волны для измерения скорости и направления ветра).
Датчики 2 вместе выполнены с возможностью измерения параметров ветров 3 в нескольких направлениях или от нескольких источников. Более конкретно, измерительные датчики 2 размещены таким образом, чтобы осуществлять сбор информации во всех направлениях вокруг летательного аппарата 1 для того, чтобы обнаруживать порывы ветра 3.
По меньшей мере один датчик 2 содержит несколько датчиков 2 (по меньшей мере четыре, предпочтительно по меньшей мере шесть датчиков 2). Вариант осуществления, показанный на фигурах, содержит шесть датчиков 2.
Несколько (четыре на фиг.1a) датчиков 2 из этих (шести) датчиков размещены в одной и той же горизонтальной плоскости (горизонтальной плоскости, которая определена как перпендикулярная к вертикали, то есть к направлению притяжения силы тяжести).
Несколько (четыре, на фиг.1b) датчиков 2 из этих (шести) датчиков размещены в одной и той же вертикальной плоскости.
В примере, показанном на чертежах, летательный аппарат 1 легче воздуха оснащен несколькими датчиками 2 типа лидара (импульсного лазера с длиной волны λ=1,54 мкм), которые позволяют измерять скорость ветра 3 во всех горизонтальных направлениях. С этой целью линии измерения, например 24, расположены по окружности летательного аппарата 1 легче воздуха. Каждый датчик 2 выполнен с возможностью измерения скорости ветра 3 на расстоянии от 40 м до 400 м от летательного аппарата 1 легче воздуха с селектором по дальности 10 или 20 м (что соответствует 10 одновременным измерениям из расчета на один луч). Измерение параметров вертикального ветра (которое осуществляет датчик 2, оснащенный, например, четырьмя лучами) позволяет увеличить точность измерения. Каждый бортовой лидар 2 представляет собой, например, лидар Wind Iris. Каждый датчик 2 содержит по меньшей мере две линии измерения, которые позволяют измерять две координаты скорости ветра. В настоящем варианте осуществления каждый датчик 2 содержит четыре линии измерения, которые позволяют измерять скорость ветра по трем координатам. Летательный аппарат 1 содержит по меньшей мере шесть датчиков на основе лидара, то есть по меньшей мере 24 линии измерения.
По меньшей мере один датчик 2 выполнен с возможностью измерения параметров ветра 3 с частотой измерений по меньшей мере 0,1 Гц, предпочтительно по меньшей мере 1 Гц.
Летательный аппарат 1 содержит исполнительные механизмы 4, выполненные с возможностью изменения положения летательного аппарата 1 в полете в зависимости от команд, принимаемых этими исполнительными механизмами 4.
Исполнительные механизмы 4 содержат средство приведения в движение (двигатели 41) и поверхности 42 управления.
Данный вариант осуществления содержит четыре двигателя 41 и четыре поверхности 42 управления.
Поверхности 42 управления являются подвижными устройствами, которые позволяют производить или управлять движениями летательного аппарата 1, например, углом атаки или углом скольжения летательного аппарата 1.
Эти исполнительные механизмы 4 могут быть предназначены для системы стабилизации согласно изобретению или нет.
Летательный аппарат 1 содержит бортовую компьютеризированную и/или электронную базу 6 данных летательного аппарата 1. База 6 данных сопоставляет различные значения измеренных параметров ветра с различными командами, предназначенными для исполнительных механизмов 4. Эти команды передаются для компенсации воздействия ветра 3 на летательный аппарат 1 при наличии значений измеренных параметров, сопоставленных с этими командами в базе 6 данных.
Построение базы 6 данных осуществляется посредством:
- аэродинамических расчетов, которые моделируют воздействие нескольких значений измеренных параметров ветра на летательный аппарат 1, и вычислений теоретических команд, которые необходимо передать на исполнительные механизмы 4 для компенсации этих воздействий; и/или
- эмпирических данных (полученных, например, в аэродинамической трубе применительно к летательному аппарату 1, или гидродинамических испытаний на макете или испытаний летательного аппарата 1 в полете или цифрового моделирования), полученных путем воздействия на летательный аппарат 1 различных значений для ветра 3 и путем исследования различных команд, передаваемых на исполнительные механизмы 4 до тех пор, пока воздействие этого ветра 3 не будут компенсированы удовлетворительным образом.
База 6 данных содержит компьютер, и/или центральное процессорное или вычислительное устройство, и/или аналоговую электронную схему (предпочтительно специализированную), и/или цифровую электронную схему (предпочтительно специализированную), и/или микропроцессор (предпочтительно специализированный) и/или средство программного обеспечения. В настоящем варианте осуществления база 6 данных хранится на флэш-памяти в вычислительном устройстве 5, описанном ниже. Эта база 6 данных выполнена, как правило, в виде таблицы поиска, например, в формате "csv".
Летательный аппарат 1 содержит средство 5 анализа и управления (которое также называется «вычислительным устройством» 5).
Средство 5 анализа и управления содержит компьютер, и/или центральное процессорное или вычислительное устройство, и/или аналоговую электронную схему (предпочтительно специализированную), и/или цифровую электронную схему (предпочтительно специализированную), и/или микропроцессор (предпочтительно специализированный) и/или средство программного обеспечения.
Как будет показано ниже, средство 5 анализа и управления выполнено (например, включая специализированную электронную плату) и/или более конкретно запрограммировано (например, включая средство программного обеспечения) для выполнения некоторых функций или операций или команды управления или вычислений и т.д.
Как будет показано ниже, каждый из этапов способа согласно изобретению, используемого летательным аппаратом 1, не выполняется в чисто абстрактной или в чисто интеллектуальной манере, но
- выполняется автоматически (полностью исключая вмешательство человека), и
- предполагает использование по меньшей мере одного технического средства.
Средство 5 анализа и управления выполнено и/или запрограммировано с возможностью:
- приёма измеренных значений параметров ветра 3, поступающих по меньшей мере от одного датчика 2;
- поиска в базе 6 данных совпадений с этими измеренными значениями параметров ветра, поступающими по меньшей мере от одного датчика 2;
- определения, в зависимости от результата этого поиска, команд, которые необходимо передать на исполнительные механизмы 4; и
- передачи этих определенных команд на исполнительные механизмы 4 (вычислительное устройство 5 передаёт команды, которые управляют двигателями 41 и поверхностями 42 управления).
Измеренные значения параметров ветра, как правило, содержат (предпочтительно для каждой точки из нескольких точек в пространстве вокруг летательного аппарата 1):
- по меньшей мере одну амплитуду или по меньшей мере одно изменение (в случае порыва ветра 3) амплитуды ветра 3, причем каждая амплитуда, как правило, представляет собой скорость или интенсивность ветра. Таким образом, по меньшей мере одна амплитуда (одно изменение амплитуды) может содержать локальную скорость (изменение локальной скорости) ветра 3 и скорость (изменение скорости) приближения ветра 3 по направлению к летательному аппарату 1: например, следует понимать, что в случае урагана локальная скорость ветра внутри урагана может быть очень высокой, но этот ураган может иметь фиксированное положение (и, таким образом, скорость его приближения будет равна нулю) по отношению к летательному аппарату 1, и
- по меньшей мере один источник (например, положение ветра 3 по отношению к летательному аппарату 1 и/или ряд датчиков 2, обнаруживающих этот ветер 3) и/или направление ветра 3 (или по меньшей мере одно изменение источника или направления ветра 3). Таким образом, по меньшей мере одно направление (одно изменение направления) может содержать локальное направление (изменение локального направления) вектора скорости ветра 3 и направление приближения (изменение направления приближения) ветра 3 по направлению к летательному аппарату 1: например, следует понимать, что в случае урагана локальная скорость ветра внутри урагана может иметь направление вращения относительно центра урагана, но этот ураган может иметь фиксированное положение (и, таким образом, будет отсутствовать направление приближения) по отношению к летательному аппарату 1;
- и при необходимости расстояние от этого ветра 3 до летательного аппарата 1.
Средство 5 анализа и управления также выполнено и/или запрограммировано с возможностью преобразования значений измерения, полученных по меньшей мере от одного датчика 2, в формат, принятый (или совместимый с) в базе 6 данных (то есть для преобразования информации об измерении в данные, которые известны или могут использоваться базой 6 данных).
Как правило, это преобразование (выполняемое вычислительным устройством 5) состоит из восстановления ветрового поля на основании отдельных измерений от нескольких датчиков 2 (например, 24 луча с 10 точками измерения, то есть 240 точек в секунду для измерения с частотой 1 Гц). После каждого измерения (каждую секунду для измерения с частотой 1 Гц) эти точки интерполируются для восстановления трехмерного векторного поля, отображающего направления и скорости ветра 3 в пространстве, окружающем летательный аппарат 1.
Средство 5 анализа и управления выполнено и/или запрограммировано с возможностью передачи команд непосредственно на исполнительные механизмы 4 без необходимости этапа утверждения или подтверждения оператором-человеком (таким, например, как пилот летательного аппарата 1).
Таким образом, каждый датчик 2 подключен к бортовому вычислительному устройству 5, специально разработанному для системы стабилизации. Протокол связи между датчиками 2 и вычислительным устройством 5 предпочтительно будет базироваться на системе CAN (локальной сети контроллеров), которая представляет собой систему последовательной шины, которая благодаря своей надежности подходит для бортовых систем, работающих в реальном времени. Она анализирует данные, полученные от датчиков 2 для того, чтобы идентифицировать возмущения. Затем она сравнивает эти возмущения с базой 6 данных, установленной заранее. База 6 данных хранится в памяти вычислительного устройства 5. Данные базы 6 данных определяют или сопоставляют каждый «случай» (то есть поле скоростей и направлений ветра 3), стратегию реагирования, то есть команды, предназначенные для исполнительных механизмов 4. Некоторое количество элементов внешних данных можно также при желании учитывать при выборе стратегии реагирования, например:
- полетные данные, такие, например, как данные IAS («мгновенной скорости воздуха» или мгновенной скорости воздуха или ветра), данные IGS («мгновенной путевой скорости» или мгновенной скорости летательного аппарата 1 относительно земли),
- данные о системе (двигателях, пропеллерах, …),
- данные о местоположении на основе GPS;
- данные о состоянии окружающей среды, такие, например, как топография вокруг летательного аппарата, температура, влажность и т.д.
Для того, чтобы выполнить эти операции, вычислительное устройство 5 имеет вычислительную мощность, как правило, соответствующую по меньшей мере вычислительной мощности центрального процессора Xeon E3-1220 с тактовой частотой 3,10 ГГц, и объемом памяти по меньшей мере 2 Гбит. Алгоритм (который сравнивает значения, захваченные датчиками 2, и данные, полученные из базы 6 данных) создаются, например, в среде LabVIEW или на языке C.
Средство 5 анализа и управления выполнено или запрограммировано с возможностью определения команд, которые необходимо передавать на исполнительные механизмы 4 с частотой по меньшей мере 0,1 Гц, предпочтительно по меньшей мере 1 Гц.
Летательный аппарат 1 также содержит средство (не показано) для измерения воздействий на положение летательного аппарата 1 определенных команд и затем их передачи на исполнительные механизмы 4; и средство 5 анализа и управления также выполнено или запрограммировано с возможностью изменения в базе 6 данных команд, сопоставленных с этими измеренными значениями параметров ветра в зависимости от измеренных воздействий, чтобы улучшить компенсацию ветра посредством команд, которые содержатся в базе 6 данных.
Для измерения этих воздействий используются инерционные данные (полученные с помощью инерциальной навигационной системы), а также данные GPS, причем все эти данные записываются.
Таким образом, способ, используемый летательным аппаратом 1, как правило, содержит:
- дистанционное измерение параметров ветра 3 по меньшей мере одним датчиком 2 летательного аппарата 1 (этап 11 на фиг.4) или предпочтительно нескольких ветров в нескольких направлениях или от нескольких источников (на фиг.1a и 1b несколько датчиков 2 размещены вокруг летательного аппарата 1 и производят все измерения вокруг летательного аппарата 1; на фиг.2 один из датчиков 2 обнаруживает порыв ветра 3), затем
- преобразование посредством средства 5 анализа и управления измеренных значений, поступающих по меньшей мере от одного датчика 2 в формате, принятом (или совместимом с) в базе 6 данных (то есть, преобразование информации об измерении в данные, которые известны или могут использоваться базой 6 данных). Как правило, это преобразование (выполняемое вычислительным устройством 5) состоит из восстановления ветрового поля (то есть трехмерного векторного поля, отображающего направления и скорости ветра 3 для нескольких точек пространства, окружающего летательный аппарат 1) на основании отдельных измерений, полученных от нескольких датчиков 2 (например, 24 луча с десятью точками измерения, то есть 240 точек за каждую секунду с частотой измерения 1 Гц). При каждом измерении (в течение каждой секунды для измерения с частотой 1 Гц) эти точки интерполируются для восстановления этого векторного поля,
- анализ и управление посредством средства 5 анализа и управления, содержащие:
прием измеренных значений параметров ветра 3, поступающих по меньшей мере от одного датчика 2 (этап 12 на фиг.4), затем
поиск (этап 13 на фиг.4), в бортовой базе 6 данных на летательном аппарате 1, совпадений с этими измеренными значениями параметров ветра, поступающими по меньшей мере от одного датчика 2, затем
определение (этап 14 на фиг.4), в зависимости от результата этого поиска, команд, которые необходимо передать на исполнительные механизмы 4 (то есть вычислительное устройство 5 анализирует ситуацию путем ее сравнения с базой 6 данных и, таким образом, определяет стратегию реагирования), затем
передачу этих определенных команд (этап 15 на фиг.4) на исполнительные механизмы 4 (через компьютер 8 управления полетом летательного аппарата 1, которое также называется командным пилотажным прибором), при этом средство 5 анализа и управления передаёт команды непосредственно на исполнительные механизмы 4 без выполнения этапа подтверждения или утверждения оператором-человеком (измеренные значения параметров ветра 3 обрабатываются вычислительным устройством 5, и на фиг.3 показано, что стратегия реагирования установлена, и что исполнительные механизмы 4 работают таким образом, чтобы создавать применительно к летательному аппарату 1 тягу 7, регулируемую по величине и направлению, которая противодействует или компенсирует воздействие порыва ветра 3 на летательный аппарат 1).
Каждый из этих этапов можно использовать в том случае, когда летательный аппарат 1 выполняет движение или выполняет (или по меньшей мере намеревается выполнять) полет в режиме висения.
По меньшей мере один датчик 2 измеряет скорость ветра 3 с частотой измерений по меньшей мере 0,1 Гц, предпочтительно по меньшей мере 1 Гц. Средство 5 анализа и управления определяет команды, которые необходимо передать на исполнительные механизмы, с частотой управляющих воздействий по меньшей мере 0,1 Гц, предпочтительно по меньшей мере 1 Гц.
Этот способ используется непрерывно. С этой целью этап измерения повторяется с частотой измерений (например, с частотой измерений 1 Гц) для того, чтобы отслеживать изменения ветра 3. Этап анализа и управления повторяется с частотой управляющих воздействий.
Поиск в базе 6 данных совпадений с измеренными значениями параметров ветра, которые называются «измеренными значениями», поступающими по меньшей мере от одного датчика 2, представляет собой поиск в базе 6 данных для измеренных значений параметров ветра, которые называются «сохраненными значениями»:
- которые хранятся в базе 6 данных и которые сопоставляются с командами, предназначенными для исполнительных механизмов 4, как объяснялось ранее, и
- которые совпадают с «измеренными» значениями параметров ветра:
- когда результат поиска совпадает с единственным «сценарием» или
- с определенным пределом погрешности, обычно плюс или минус 1% от измеренных значений, или которые являются наиболее близкими по отношению ко всем сохраненным значениям измерения (результат поиска совпадает с единственным «сценарием» или несколькими очень похожими сценариями).
В случаях, когда этап 13 поиска содержит сравнение между трехмерным «измеренным» полем (поступающим по меньшей мере от одного датчика 2) векторов, представляющих направления и скорости ветра 3 в пространстве, окружающем летательный аппарат 1 с набором сценариев (то есть сохраненными значениями или сохраненными трехмерными векторными полями, представляющими направления и скорости ветра 3 в пространстве, окружающем летательный аппарат 1), которые хранятся в базе 6 данных, результат 13 поиска, как правило, совпадает с различными очень похожими сценариями, и этап 14 определения будет обеспечивать реакцию каждого исполнительного механизма 4 в виде взвешенной композиции нескольких команд, которые хранятся в базе 6 данных и сопоставляются с этими различными сценариями (в частности, когда измеренный ветер 3 содержит несколько порывов в нескольких направлениях).
Этот способ также содержит:
измерение (на фиг.4 не показано) воздействий, на положение летательного аппарата 1, сопоставленных команд, передаваемых на исполнительные механизмы 4, и затем
если эти воздействия являются неудовлетворительными (например, «удовлетворительный» характер получается в ходе сравнения измеренных воздействий по отношению к порогу устойчивости положения летательного аппарата 1 в случае полета в режиме висения), коррекцию или изменение (на фиг.4 не показано) базы 6 данных посредством средства 5 анализа и управления в зависимости от измеренных воздействий. Система 2, 4, 5 и 6 записывает все данные и поэтому может выполнять коррекцию или изменение:
во время полета летательного аппарата 1 («в режиме онлайн»), во время которого измеряются эти данные, или
после полета летательного аппарата 1 («в автономном режиме»), во время которого измеряются эти данные, для внесения улучшения в базу данных, которая будет задействована во время сеансов технического обслуживания.
Таким образом, изобретение используется при прогнозировании, то есть при реакции летательного аппарата 1 по отношению к динамике полета, когда заранее известно, что будет иметь место заданный сценарий ветра 3. Полученная в результате система имеет преимущество, связанное с тем, что она обладает гораздо более быстрой реакцией, чем если бы вычисления проводились в реальном времени. Кроме того, реакции могут изменяться в зависимости от обратной связи. Каждая реакция анализируется, и если реакция является удовлетворительной, то система 2, 4, 5, 6 может изменить свою стратегию.
Разумеется, изобретение не ограничивается примерами, которые только что были описаны, и в эти пример могут быть внесены многочисленные поправки, не превышающие объем изобретения.
Например, в варианте, каждый из всех или часть датчиков 2 можно заменить на датчик (например, приемник воздушного давления и/или анемометр), который не предназначен для дистанционного измерения параметров ветра, то есть предназначен для измерения параметров ветра только в том случае, когда этот ветер находится в контакте с летательным аппаратом 1.
Более того, в «неавтоматическом» (менее предпочтительном) варианте пилоту летательного аппарата 1 может быть обеспечена карта аэрологической среды вокруг летательного аппарата 1 (причем эта карта устанавливается на основании значений, измеренных по меньшей мере одним датчиком 2), что позволяет ей свободно действовать соответствующим образом (например, с учетом рекомендации относительно выбора).
Разумеется, различные признаки, формы, варианты и варианты осуществления изобретения могут быть объединены в различных сочетаниях, если они не являются несовместимыми или взаимоисключающими. В частности, все варианты и варианты осуществления, описанные выше, могут быть объединены.
Реферат
Изобретение относится к летательному аппарату и способу стабилизации летательного аппарата. Летательный аппарат содержит датчик для измерения ветра, исполнительные механизмы, встроенную базу данных на борту летательного аппарата, средство анализа и управления, средство для измерения воздействий на положение летательного аппарата. Для обеспечения стабилизации летательного аппарата измеряют параметры ветра, проводят анализ и управление посредством бортового средства анализа и управления на летательном аппарате определенным образом. Обеспечивается стабилизация летательного аппарата, подверженного изменениям ветра. 2 н. и 14 з.п. ф-лы, 5 ил.
Комментарии