Оптический отражатель с полуотражающими пластинами для устройства отслеживания положения шлема и шлем, содержащий такое устройство - RU2543680C2
Код документа: RU2543680C2
Чертежи






Описание
Область техники
Изобретение относится к области оптических устройств отслеживания моментальных положения и ориентации шлема пилота летательного аппарата.
Предшествующий уровень техники
В дальнейшем тексте описания конкретные положение и ориентация шлема в совокупности будут называться пространственным положением. В некоторых вариантах применения в авиации шлемы пилотов оборудованы устройствами визуального отображения, позволяющими отображать в поле зрения пилота информацию, касающуюся пилотажа, навигации или системы вооружения. Как правило, эти устройства визуального отображения на шлеме связаны с системами отслеживания положения и ориентации шлема.
Существуют различные системы, позволяющие засекать положение шлема. В частности, используют системы, основанные на анализе оптических сигналов, характеризующих положение шлема. Эти системы обязательно содержат источник или источники излучения света и источник или источники приема света. Источниками излучения могут быть светящиеся прицелы или точечные источники типа электролюминесцентного диода, закрепленные на шлеме в определенном порядке, например в виде треугольника. Положение шлема в определенной зоне получают в этом случае посредством анализа изображений диодов, принятых камерами с нескольких точек, и посредством геометрического вычисления определяют положение головы в пространстве. Такие устройства выпускает компания Карл Цейс/Денел. Можно, наоборот, расположить на шлеме блоки фотодатчиков или фотодиодов и освещать их устройствами, проецирующими специальные изображения, таким образом, чтобы обеспечить получение информации о пространственном положении шлема посредством либо пространственного, либо временного анализа.
При любом выбранном методе солнечное освещение влияет на отслеживаемый сигнал. Действительно, шлем рассеивает часть солнечного света в направлении камер распознавания. Известно, что солнечное освещение может достигать 70000 люкс в случае стекла кабины, пропускающего 70% света. Обнаруживаемый сигнал является практически бесполезным, учитывая сильное солнечное освещение шлема.
Когда источники излучения находятся на шлеме, их сигнал оказывается рассеянным в солнечном свете. Если на шлеме находятся фотодатчики, сигнал от источника оказывается рассеянным в солнечном свете. Можно также осуществлять излучение и прием в диапазоне длин волн, находящемся за пределами видимой области солнечного излучения, то есть либо в инфракрасной области, либо в ближней ультрафиолетовой области. Однако в инфракрасном и ультрафиолетовом диапазонах уровни солнечного освещения остаются высокими, и этот тип решения требует наличия специальных источников излучения и приема, что неизбежно приводит к удорожанию системы отслеживания.
Другое решение представлено на фиг.1. Согласно этому решению, на шлеме 1 размещают прицелы 3, показанные на этой фигуре в виде треугольников и содержащие, по меньшей мере, первый оптический элемент 5 типа «отражателя» с высоким коэффициентом обратного отражения и очень низким коэффициентом рассеяния в видимой области. Устройство отслеживания содержит комплект неподвижных камер 2, связанных с системой обработки изображений. Таким образом, солнечное излучение RS обязательно отражается в направлении солнца, как показано на фиг.1, и не может достичь камер 2 отслеживания. Для работы в ночное время устройство отслеживания содержит комплект неподвижных источников 6 света, освещающих шлем, при этом отражатель 5 имеет очень высокий коэффициент обратного отражения и очень низкий коэффициент рассеяния в области излучения источника. Устройство дополняют оптико-механическими средствами 61 и 62, позволяющими получать изображение источника 6 света на оптической оси камеры 2. Используя несколько прицелов 3, соответствующим образом распределенных на шлеме, и несколько неподвижных камер, можно перекрывать весь интервал перемещения 4 шлема.
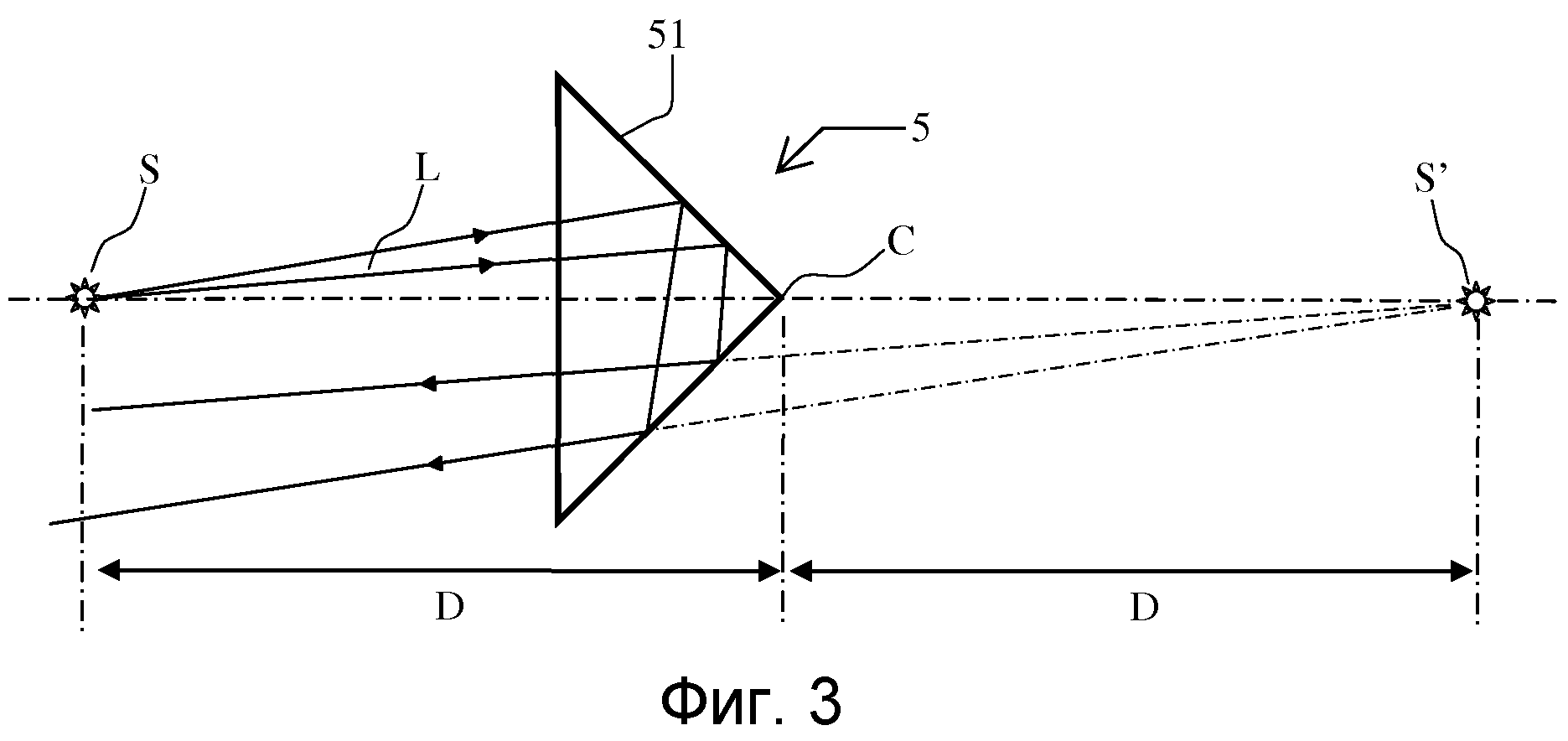
Как правило, «отражателем» называют любой оптический отражатель или обратный отражатель, обладающий свойством отражения пучка света в направлении, совпадающем с направлением падения пучка. Для реализации этой функции существуют различные оптические средства. В частности, особый интерес представляют отражатели, в дальнейшем называемые «уголковыми отражателями». «Уголковый отражатель» 5, показанный на фиг.2, образован тремя ортогональными между собой плоскими зеркалами 51. Таким образом, пучок света, излучаемый излучающей частью, и освещающий отражатель 5 отражается в том же направлении в сторону принимающей части с отличным коэффициентом, как показано на фиг.3. На этой фигуре показано прохождение световых лучей L от точечного источника S в уголковый отражатель 5. Для большей ясности на этой фигуре распространение лучей показано в плоскости, параллельной одному из трех зеркал, образующих куб. В этой плоскости световые лучи только дважды отражаются от зеркал 51. На этой фигуре наглядно видно, что изображение источника S представляет собой источник S', находящийся на оси SC, проходящей через источник S и центр С уголкового отражателя, и на равном от него расстоянии D. Точно также любой световой пучок, который исходит не от источника и который попадает на отражатель, практически не производит никакого освещения принимающей части.
Понятно, что применения только одного отражателя не достаточно для реализации функции позиционирования и мгновенной ориентации шлема. Можно показать, что такое распознавание возможно посредством использования, среди всего прочего, тетраэдра, в котором четыре вершины являются отражателями. Способ распознавания двухмерной проекции тетраэдра описан, например, в европейском патенте ЕР 0294101, выданном на имя компании «Эль-Оп». Согласно этому патенту, четыре источника, расположенных в четырех вершинах тетраэдра, дают четыре точки изображения в плоскости изображения камеры. Зная проецируемые координаты четырех точек, вычисляют положение тетраэдра в пространстве после устранения неопределенностей посредством дискриминации точек и исключения аберрантных конфигураций (четыре заданные точки на плоскости соответствуют шестнадцати возможным конфигурациям, которые имеют известную геометрию, но ориентацию которых необходимо определить).
Разумеется, достоверность относительного положения точек имеет прямое влияние на точность измерения положения. Действительно, можно показать, что любой дефект геометрии тетраэдра, будь то изначальный или связанный с изменением структуры, приведет не только к ухудшению точности измерения, но и к новой неопределенности в дискриминации точек. Например, угловое отклонение в 5 мрад в положении точки тетраэдра приводит к погрешности измерения в 1 мрад. Таким образом, определяющей становится жесткость держателя, которая обеспечивает соблюдение относительных размеров положения точек. Это является неизбежной помехой для систем, которые должны оставаться максимально легкими, поскольку находятся на голове пользователя.
Краткое изложение существа изобретения
Задачей настоящего изобретения является реализация оптической системы отслеживания положения и ориентации, использующей специальные отражатели, позволяющие при помощи только одного компонента создавать отслеживающие тетраэдры. Таким образом, устройство можно легко использовать в большом диапазоне освещенности днем при освещении порядка 100000 люкс и ночью при освещении порядка 0,01 люкс с применением прицелов в форме тетраэдра, которые позволяют легко определять положение и ориентацию шлема в пространстве. Преимуществом этого решения является также отказ от электрического питания для прицелов, находящихся на шлеме пилота, его исключительная простота и надежность и возможность обеспечения улучшенных отношений сигнал/шум при любом освещении. Оно предназначено, в частности, для окружающей среды кабин летательных аппаратов.
В частности, объектом изобретения является оптический компонент для оптического устройства отслеживания положения/ориентации шлема, содержащий оптический «уголковый отражатель», то есть трехгранник с тремя прямыми углами, состоящий из плоских поверхностей, отличающийся тем, что каждая из трех плоских поверхностей содержит плоскую пластину, содержащую параллельные между собой первую грань и вторую грань, при этом первая грань совпадает с плоской поверхностью, на которой она находится, при этом граница раздела между этой первой гранью и упомянутой поверхностью имеет полуотражающую обработку.
Предпочтительно «уголковый отражатель» является призмой с плоскими гранями, выполненной из прозрачного материала, при этом полуотражающая обработка может быть одинаковой или разной для трех границ раздела, и вторая грань пластин может иметь отражающую обработку.
Объектом изобретения является также шлем, содержащий, по меньшей мере, одно покрытие, рассеивающее свет, и описанный выше оптический компонент.
Объектом изобретения является также оптическое устройство отслеживания положения/ориентации шлема, при этом упомянутое устройство содержит, по меньшей мере, одну неподвижную камеру, связанную с системой обработки изображений, неподвижный источник света, оптико-механические средства, позволяющие получать изображение источника света на оптической оси камеры, и шлем, содержащий описанный выше оптический компонент.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
фиг.1 изображает известную систему отслеживания положения;
Фиг.2 изображает известный уголковый отражатель;
Фиг.3 изображает оптическую работу этого уголкового отражателя;
Фиг.4 изображает вид в разборе и общий вид уголкового отражателя в соответствии с изобретением;
Фиг.5 изображает принцип работы уголкового отражателя в соответствии с изобретением, вид в плоскости;
Фиг.6 изображает принцип работы уголкового отражателя в соответствии с изобретением, общий вид;
Фиг.7 изображает различные изображения, генерируемые в уголковом отражателе в соответствии с изобретением;
Фиг.8 изображает систему отслеживания положения в соответствии с изобретением.
Описание предпочтительных вариантов воплощения
Вместо точного позиционирования четырех источников и их отображения компонента в соответствии с изобретением создает N виртуальных изображений одного и того же источника S при помощи специального устройства, показанного в двух проекциях на фиг.4. Как показано в левой части на фиг.4, на трех плоских гранях 51 уголкового отражателя 5 расположены три пластины с плоскими и параллельными гранями. Первая грань 71 каждой пластины 7 расположена на грани 51, при этом граница раздела между этой первой гранью 71 и поверхностью 51 имеет полуотражающую обработку. Вторая грань 72 каждой пластины является отражающей.
Справа на фиг.4 показана компонента 8 в соответствии с изобретением после соединения уголкового 5 отражателя и трех пластин 7 и удаления кромок уголкового отражателя (показаны пунктирными линиями).
Работа оптической компоненты в соответствии с изобретением описана со ссылками на фиг.5 и 6, где соответственно показаны изображение, получаемое при помощи уголкового 5 отражателя и одной из трех пластин 7, затем изображение, получаемое при помощи уголкового отражателя и всех трех пластин.
Как показано на фиг.5, точечный источник S установлен по оси SC, проходящей через центр исходного уголкового 5 отражателя. Для ясности изложения считается, что S находится в оптической среде исходного уголкового отражателя, или, иначе говоря, источник S является изображением источника S0, не показанного на фиг.5 и находящегося в воздухе. Таким образом, световые лучи, исходящие от источника S, частично отражаются поверхностью 51 и частично через нее проходят. Добавление полуотражающей пластины 7 позволяет получить второй оптический угол куба с вершиной С1. Как было указано выше, первый угол куба дает первое изображение S' источника S. Второй угол куба дает второе изображение S1 источника S. В проекции по оси SS' изображение S1 смещено на двойное расстояние смещения СС1 по этой же оси, то есть в сумме е.√2, где е является толщиной присоединенной пластины 7.
Угол α, под которым S1 наблюдается со стороны S, является таким же, что и угол, под которым С1 наблюдается со стороны S, то есть е/(SC√2).
Как показано на фиг.6, добавив к каждой грани уголкового отражателя отражающую пластину толщиной е, на основании S получают три точки изображения S1, S2 и S3. Четыре точки S', S1, S2 и S3 образуют в пространстве тетраэдр. От источника S центральные точки С1, С2 и С3 видны под тем же углом, что и точки S1, S2 и S3. Точки изображения S1, S2 и S3 распределены вокруг S' с углом 60° и с постоянным расстоянием, если все три присоединенные пластины имеют одинаковую толщину, и изображение, передаваемое оптическим компонентом и образованное совокупностью точек S', S1, S2 и S3, является, таким образом, виртуальным тетраэдром, который возвращает поток, исходящий от источника S, к этому же источнику. Таким образом, этот компонент является оптическим эквивалентом четырех углов куба, расположенных в виде тетраэдра.
Как показано на фиг.7, полуотражающая плоская пластина генерирует не только два изображения S' и S1, но также множество изображений в результате множественных отражений между гранями пластины. На этой фигуре показано только одно из трех изображений. Обозначив коэффициенты отражения двух граней как R1 и R2, можно показать, что коэффициентами отражения различных изображений последовательно являются R1, R2.(1-R1)2, R1.R22(1-R1)2, R12.R23(1-R1)2, …. Вместе с тем только изображения S' и S1 имеют большие коэффициенты отражения. Кроме того, можно использовать другие изображения, поскольку их положение хорошо известно. Полуотражающая обработка может быть одинаковой или разной для трех границ раздела. В случае, когда для трех границ раздела обработка является разной, можно дифференцировать три изображения S1, S2 и S3 по их фотометрическим или колориметрическим свойствам.
На фиг.8 представлена система полного отслеживания положения, шлем которой содержит компоненты 8 в соответствии с изобретением. Как показано на этой фигуре, устройство содержит шлем 1, надетый на голову пользователя, который может двигаться в определенной зоне 4. Устройство в соответствии с изобретением предназначено для работы в авиационной среде, такой как кабина летательного аппарата. В данном случае пользователем является пилот. Однако это устройство можно использовать в любых вариантах применения, когда требуется знать пространственное положение головы пользователя.
Шлем 1 содержит матовое рассеивающее покрытие, предпочтительно светлого оттенка, и содержит набор компонентов 8. Каждый компонент 8 показан на фиг.8 в виде тетраэдра.
Получение четырех одинаковых изображений, выдаваемых оптическими компонентами 8, обеспечивает набор камер 2. Для ясности на фиг.8 показана только одна камера. Камеры расположены таким образом, чтобы, независимо от движений головы пользователя, некоторое число компонентов 8 постоянно находилось в поле обзора камер. Как правило, считают, что достаточно трех камер. Камеры могут быть камерами с датчиками CCD (Charge Coupled Device). Фокусное расстояние и апертуру объектива камер следует выбирать достаточно небольшими, чтобы изображения источников постоянно были четкими на фоточувствительной поверхности. Разрешение камеры должно соответствовать требуемой точности отслеживания. Чувствительность камеры должна быть достаточной, чтобы можно было использовать получаемые изображения источников.
Устройство отслеживания содержит также один или несколько неподвижных источников 6 света, распределенных в кабине и соответствующих камерам 2. Эти источники 6 имеют угол освещения, адаптированный к углу освещения камер 2. Эти источники 6 должны работать в диапазоне чувствительности камер 2. Предпочтительно этими источниками 6 являются электролюминесцентные диоды, преимуществом которых одновременно являются компактность, высокая прочность и высокая надежность.
Устройство отслеживания содержит оптико-механические средства, позволяющие получать изображение каждого источника 6 света на оптической оси соответствующей камеры. В случае, представленном на фиг.8, этими средствами являются простое зеркало 61 и полуотражающая пластина 62, обеспечивающие комбинирование двух путей источник-камера. В данном случае излучение источника 6, освещающего отражательный компонент 8, возвращается к камере. При этом отражательный компонент дает четыре изображения, ярко выделяющиеся на темном фоне и обозначенные на фиг.8 четырьмя стрелками.
В описанные выше отличительные признаки можно вносить определенное число изменений, позволяющих улучшить отслеживание. Так, источник света может быть модулированным по времени, он может быть сканирующим, может автоматически управляться для освещения конкретных зон шлема.
Этот компонент имеет следующие основные преимущества:
- тетраэдр использует катадиоптрические и фотометрические свойства уголкового отражателя и позволяет возвращать в направлении источника исходящий из него поток, и, поскольку источник находится на одной линии с камерой, то, следовательно, и в направлении камеры, тогда как другая система потребовала бы зависимости лепестка излучения от источника;
- образованный тетраэдр имеет очень высокую точность. Действительно, углы куба и грани изготавливаются с очень высокой точностью, которая может достигать секунды дуги, при этом толщины граней могут быть очень равномерными как по толщине, так и по плоскости. Такой точности невозможно достичь с реальным тетраэдром, образованным четырьмя механически независимыми компонентами или четырьмя источниками;
- образованный тетраэдр является монолитным: деформация приводит к его разрушению, что позволяет обнаруживать любое изменение формы;
- образованный тетраэдр является виртуальным. Он может находиться «в голове оператора» с точки зрения камеры, что обеспечивает намного большую широту выбора положения оптического компонента;
- размер тетраэдра зависит только от расстояния до источника и является подобным этому источнику, при этом полученная точность не зависит от расстояния, тогда как реальная тетраэдрическая система имела бы точность, зависящую от близости камеры.
Реферат
Изобретение относится к области оптических устройств отслеживания положения/ориентации шлема и, в частности, таких устройств, в которых шлем не содержит ни передатчиков, ни приемников, а только пассивные оптические компоненты, обнаружение которых обеспечивают неподвижные оптоэлектронные средства, внешние по отношению к шлему. Оптический компонент для оптического устройства отслеживания положения/ориентации шлема в соответствии с изобретением содержит специальный оптический уголковый отражатель. Он содержит призму в виде трехгранника с тремя прямыми углами, при этом каждая из трех плоских поверхностей трехгранника содержит пластину с плоскими и параллельными между собой гранями, при этом первая грань совпадает с плоской поверхностью, на которой она находится, при этом граница раздела между этой первой гранью и упомянутой поверхностью имеет полуотражающую обработку. Технический результат - повышение точности отслеживания положения/ориентации шлема при различных освещённостях.3 н. и 4 з.п. ф-лы, 8 ил.
Комментарии