Способ автоматического подведения к погрузочно-разгрузочной площадке для применения в грузовых автомобилях большой грузоподъемности - RU2720138C2
Код документа: RU2720138C2
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу автоматического подведения к погрузочно-разгрузочной площадке транспортного средства, в частности автопоезда из грузового автомобиля и прицепа.
УРОВЕНЬ ТЕХНИКИ
На сегодняшний день в уровне техники грузовые автомобили большой грузоподъемности оборудуются системами рулевого управления, главным образом на основе гидравлического усиления по неподвижному «пассивному» принципу. Для новейших тенденций, однако, характерно введение электродвигателя (либо в качестве дополнительной системы, либо даже в качестве полной замены гидравлической системы), который задействует колеса и поддерживает перемещения рулевого колеса. Общим для всех этих электрических систем рулевого управления является то, что им необходима основанная на ECU (блоке управления двигателем) система управления с датчиками. Кроме того, большинство интерфейсов CAN (сети контроллеров) обеспечиваются для соединения их с другими системами управления транспортного средства. Такие активные системы рулевого управления могут также использоваться для реализации Усовершенствованных Систем Содействия Водителю (Advanced Driver Assistance Systems), которые могут использоваться для взаимодействия с водителем, помощи ему в дорожных ситуациях и даже облегчения автономного управления движением. Основная проблема состоит в обеспечении содействия водителю, или даже поддержки в автономном управлении движением для подведения к погрузочно-разгрузочной площадке прицепа - то есть управлении движением в обратном направлении при постановке на стоянку прицепа напротив погрузочно-разгрузочной площадки для загрузки и разгрузки прицепа со значительным облегчением трудоемкости для водителя в данной очень точной задаче маневрирования на низкой скорости (при пониженной видимости у цели) с одной стороны и увеличением эффективности этой логистической деятельности (в качестве части ежедневных действий в системе складского помещения) с другой стороны.
Одна из многих трудностей заключается в ограниченном помещении для маневрирования на типичных погрузочно-разгрузочных площадках, куда прицеп должен подъехать в обратном направлении по прямой линии без возможности малых регулировок, особенно для вариантов выполнения с фиксированным задним валом.
Однако несмотря на то, что эти системы начинают появляться в личных транспортных средствах, в грузовых транспортных средствах, в частности превышающих 6 тонн, значительную трудность представляет размерность этих систем, ввиду сложности управления движением в обратном направлении автопоезда с прицепом.
В других системах предшествующего уровня техники, например, DE 102004047214, предусмотрено определение положения транспортного средства и анализа окружающей обстановки. В окружающей обстановке выявляют объекты назначения и свободные пространства. Связанный вектор подведения к погрузочно-разгрузочной площадке рассчитывается из заданного положения транспортного средства до упомянутых объектов. Планируется маршрут до объектов, и трех- или двумерные характеристики идентифицированного объекта записываются для получения информации о новом положении транспортного средства в течение перемещения. В документе DE'214 необходимо значительное усилие для анализа сложной 3-D окружающей обстановки, что также менее оптимально, потому что анализ требует постоянного обновления и адаптации, когда транспортное средство находится в движении, и точно известное местоположение транспортного средства необходимо для выполнения маневра по подведению к погрузочно-разгрузочной площадке. Михалек (Michalek) в документе «Концепция пассивного содействия управлению для маневров по подведению к погрузочно-разгрузочной площадке транспортных средств с N прицепами» Мехатроника, Транзакции IEEE/ASME IEEE/ASME в мехатронике (10 ноября 2014, Том:20, Выпуск: 5) ("The concept of passive control-assistance for dochng maneuvers with N-trailer vehicles" Mechatronics, IEEE/ASME IEEE/ASME Transactions on Mechatronics) описывает усовершенствованный алгоритм управления для активного или пассивного содействия управлению, основываясь на более ранних концепциях, в частности, описанных в документе «Точное планирование движения для роботов между тягачом и прицепом» Международная конференция IEEE по вопросам Роботов, Робототехники и Автоматики, Слушания 1995 (Svestka, Vleugels, Том: 3) ("Exact Motion Planning for Tractor-Trailer Robots" IEEE International Conference on Robotics and Automation Robotics and Automation, Proceekngs 1995 (Svestka, Vleugels, Volume:3)). Авторы настоящего изобретения сосредоточились на решениях с траекториями, которые могут быть спланированы. Однако не предусмотрено достоверное согласование с окружающей средой в конкретном сооружении. Существует необходимость в обеспечении надежного способа автономно подведения к погрузочно-разгрузочной площадке автопоезда из грузового автомобиля и прицепа в конкретном сооружении. Кроме того необходим эффективный вычислительный алгоритм для определения местоположения задней части прицепа по отношению к погрузочно-разгрузочной площадке, который будет минимизировать нагрузку на контроллер.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задача состоит в предоставлении способа направления моторного транспортного средства на основе данных изображения, в частности при маневрировании грузовыми автомобилями к погрузочно-разгрузочным станциям посредством контроллера подведения к погрузочно-разгрузочной площадке, соединенного с системой рулевого управления, содержащего этапы, на которых:
определяют, посредством контроллера подведения к погрузочно-разгрузочной площадке, текущее положение транспортного средства;
принимают свободную от столкновений траекторию и
осуществляют маневрирование транспортным средством посредством упомянутого контроллера подведения к погрузочно-разгрузочной площадке согласно упомянутой свободной траектории, при этом текущее положение транспортного средства определяют посредством внебортового сканера для транспортного средства, который установлен в фиксированном положении относительно погрузочно-разгрузочной станции;
при этом упомянутый сканер для транспортного средства выполнен с возможностью создания данных сканирования, обозначающих набор, который анализируют для определения контрольной точки транспортного средства и ориентации транспортного средства;
при этом упомянутые контрольную точку и ориентацию транспортного средства передают в контроллер подведения к погрузочно-разгрузочной площадке для обновления текущего положения транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение будет дополнительно объяснено на следующих фигурах:
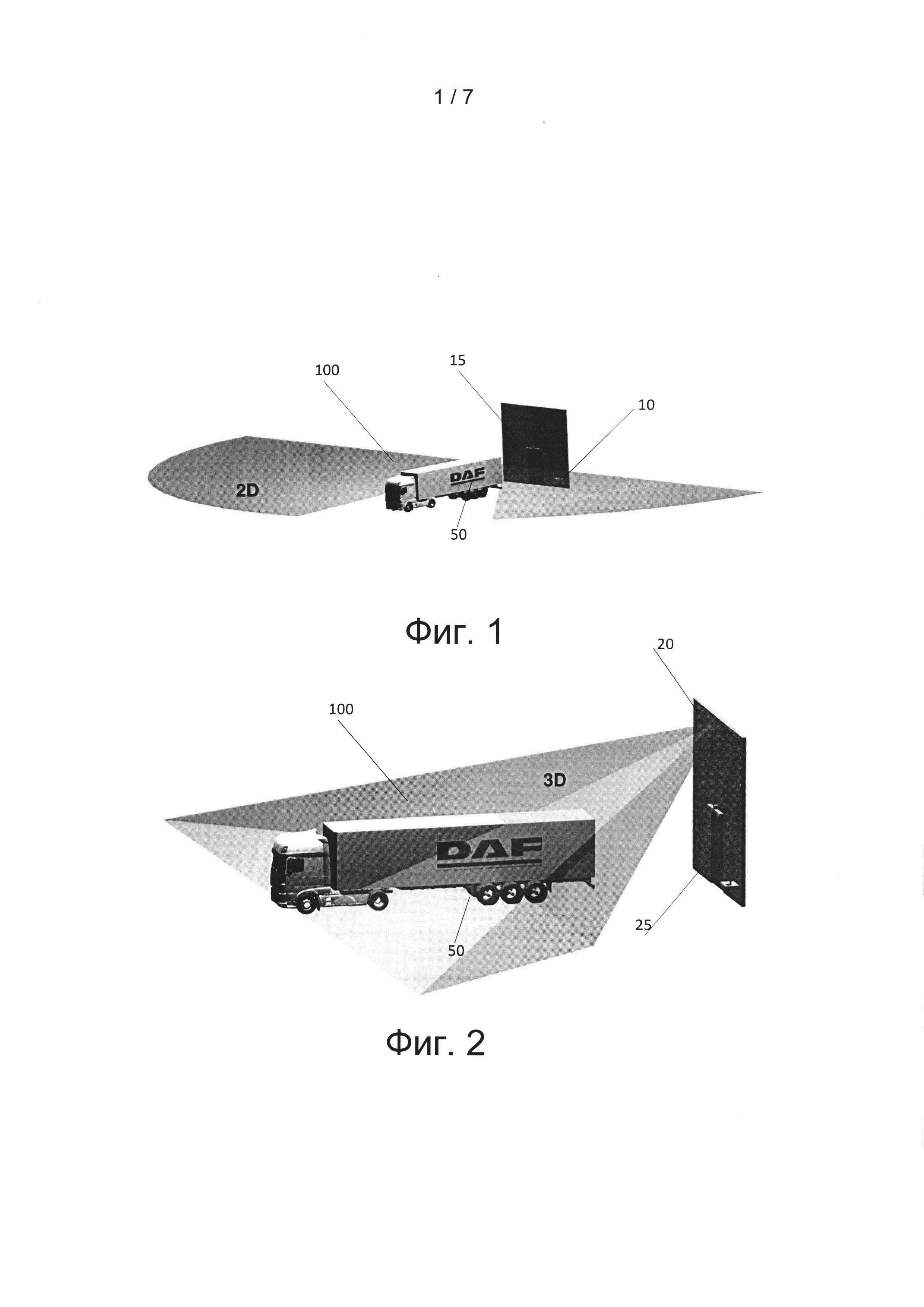
На Фигуре 1 и Фигуре 2 изображены общие реализации вариантов осуществления согласно настоящему изобретению, имеющих 2-D или 3-D сканер для транспортного средства;
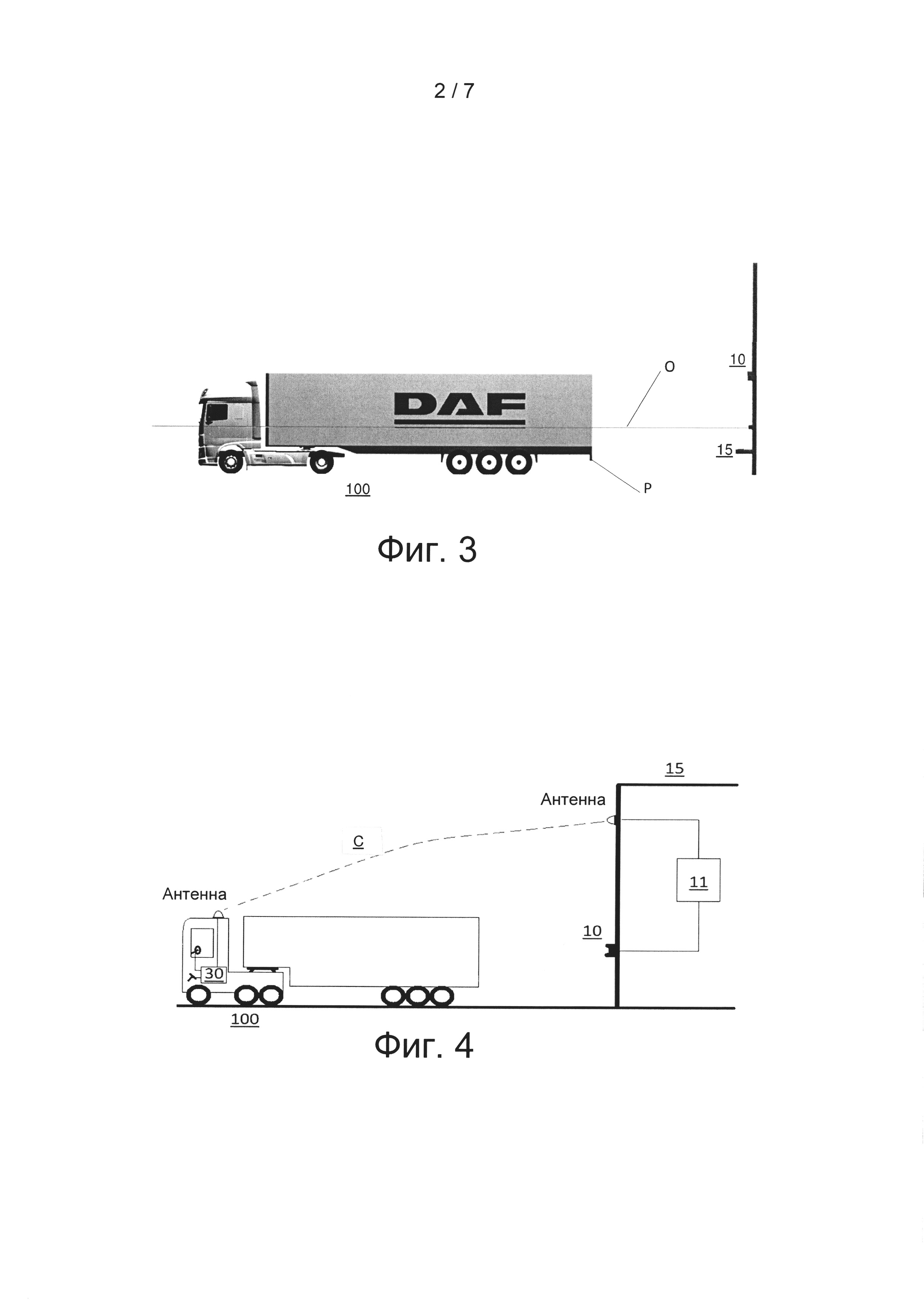
На Фигуре 3 изображен автопоезд из грузового автомобиля и прицепа, определенный сканером транспортного средства;
На Фигуре 4 изображен автопоезд из грузового автомобиля и прицепа в среде беспроводной связи;
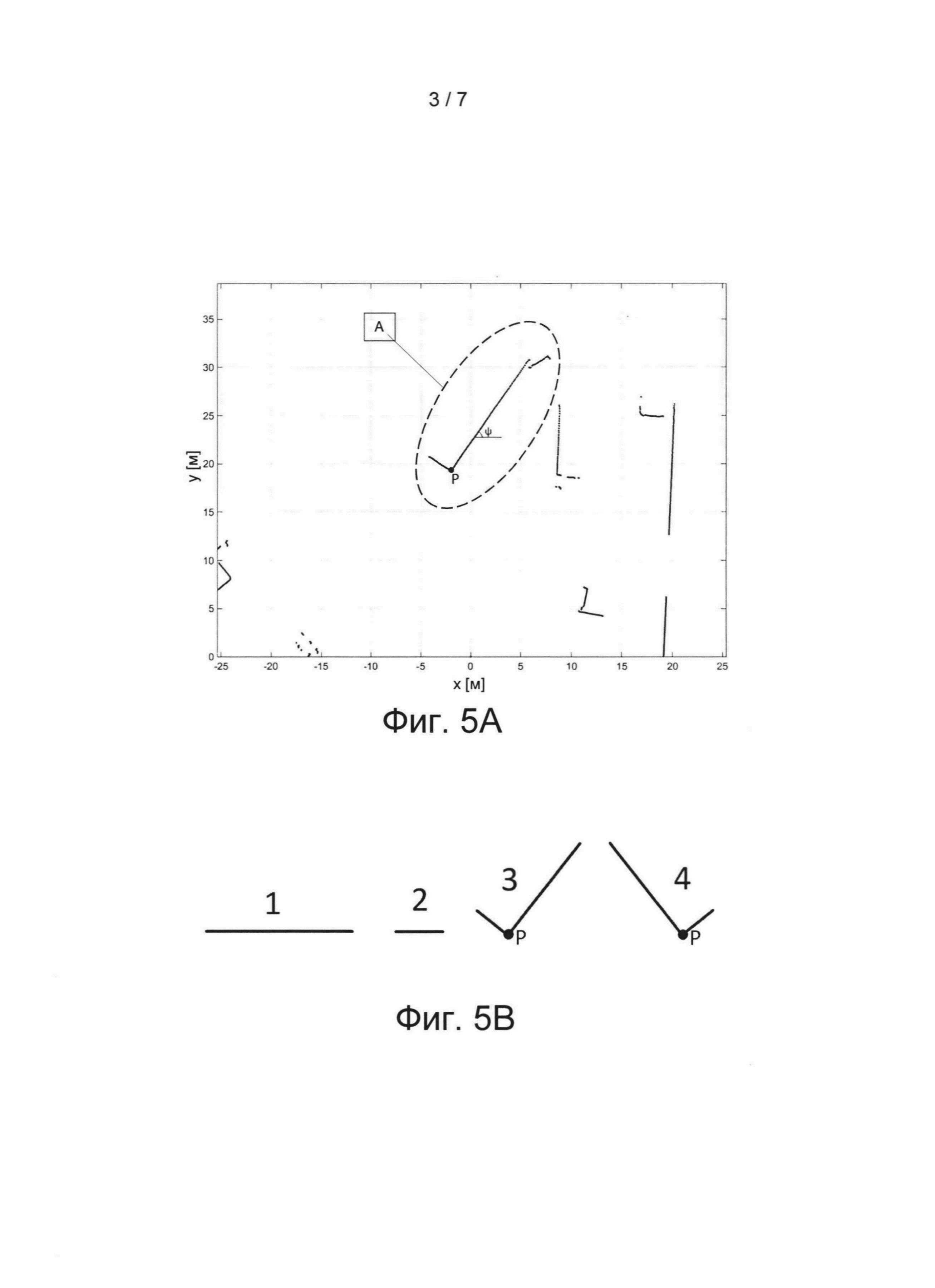
На Фигуре 5А изображен примерный график сканирования для сканирования от сканера транспортного средства согласно настоящему изобретению;
На Фигуре 5В изображено некоторое количество сценариев видимости;
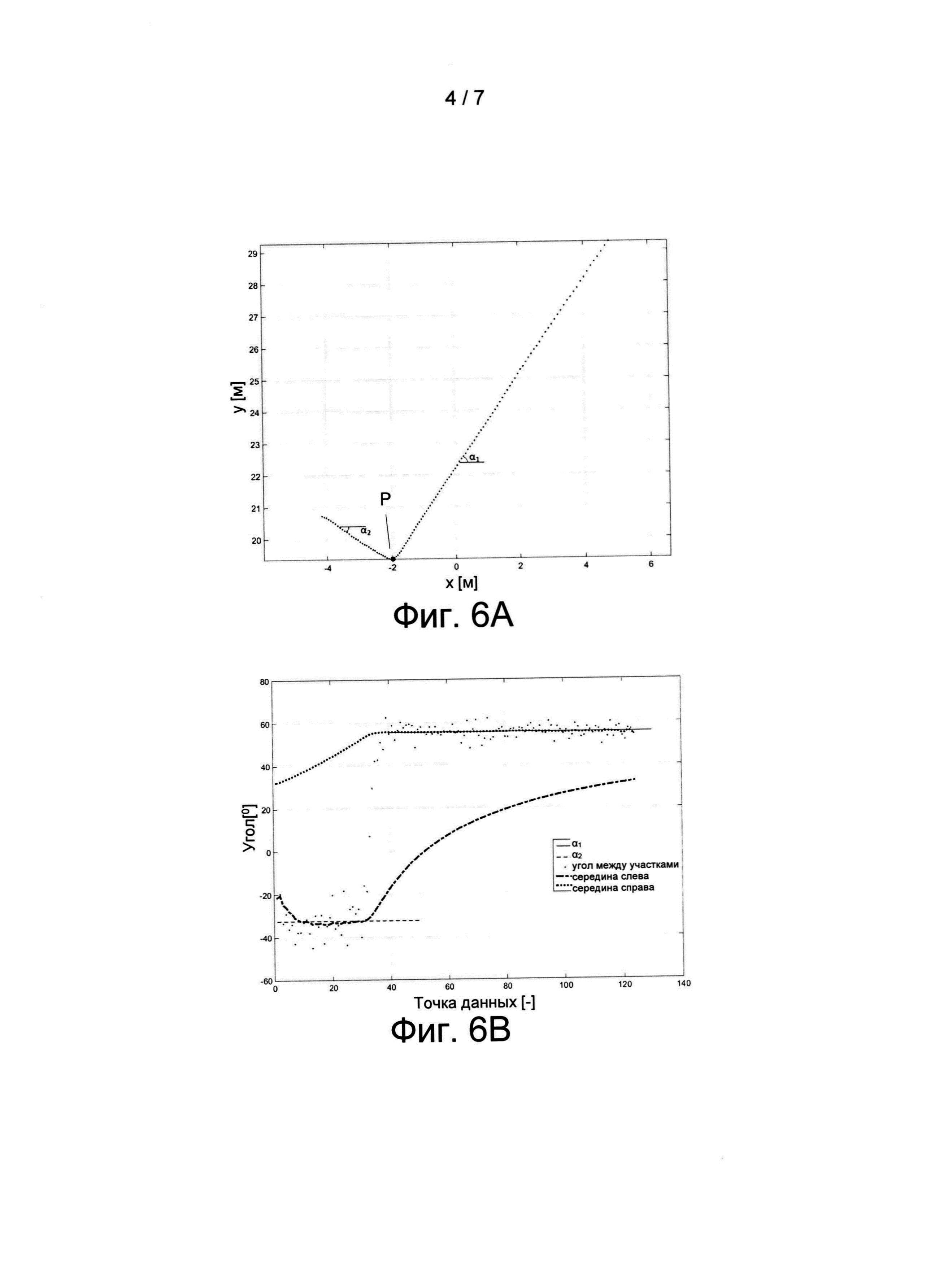
На Фигуре 6А изображена подробность примерного графика сканирования, в котором упомянутые данные сканирования предварительно отфильтрованы посредством контроллера для определения приблизительного положения прицепа из предварительно отфильтрованного набора данных;
На Фигуре 6В изображены из примерного графика сканирования два набора точек данных средних значений, образующих два соответствующих линейных участка;
при этом наборы точек данных согласуются с одним из некоторого количества сценариев видимости прицепа;
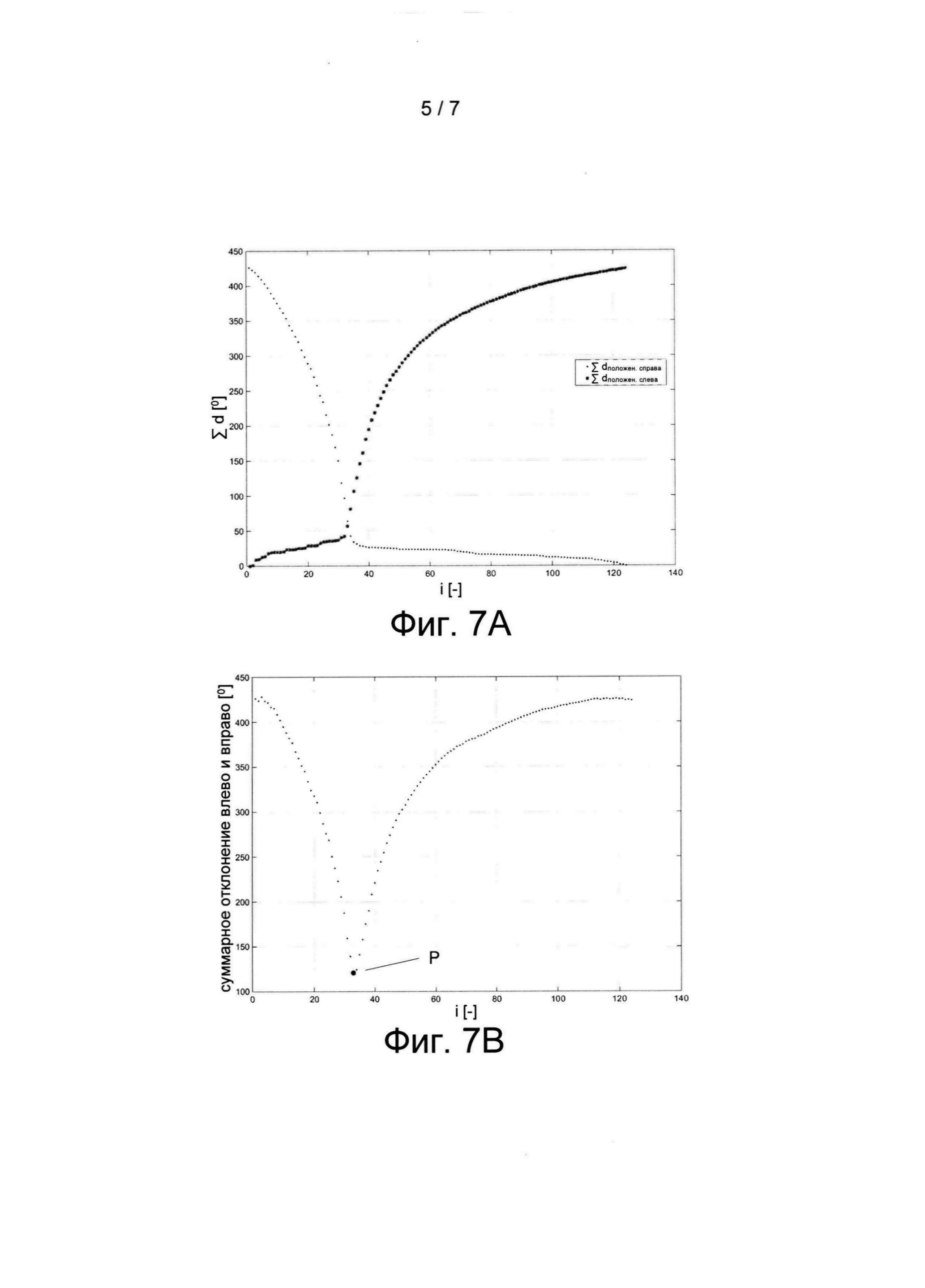
На Фигуре 7А изображены ошибки, отклоняющиеся от первого и второго средних значений соответственно;
На Фигуре 7В изображены суммированные ошибки с Фигуры 7А, показывающие минимальное значение ошибки;
На Фигурах 8-10 изображено примерное планирующее управление планированием свободной от столкновений траектории;
и маневрирование грузовым автомобилем посредством упомянутого контроллера подведения к погрузочно-разгрузочной площадке согласно упомянутой свободной траектории.
ОУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Пока не указано обратное, все термины (включая технические и научные термины), используемые в данном документе, имеют одно и то же значение, которое является общим в понимании средними специалистами в уровне техники, которому данное раскрытие принадлежит при прочтении в контексте описания и чертежей. Дополнительно следует понимать, что термины, определяемые в словарях общего пользования, должны толковаться в качестве имеющих значение, которое соответствует их значению в контексте связанного уровня техники, и не должны толковаться в идеализированном или чрезмерно формальном смысле, пока это явно не будет указано в данном документе. В некоторых случаях, подробные описания хорошо известных устройств и способов могут быть пропущены, чтобы не загромождать описание настоящих систем и способов. Терминология, используемая для описания отдельно взятых вариантов осуществления, не предназначена ограничивать настоящее изобретение. Подразумевается, что используемые в данном документе формы единственного числа также включают в себя формы множественного числа, пока в контексте ясно не будет указано обратное. Термин «и/или» включает в себя любое и все сочетания из одного или более из связанных перечисленных элементов. Дополнительно должно быть понято, что термины «содержит» и/или «содержащий» определяют наличие изложенных признаков, но не исключают наличия или добавления одного или более других признаков. Все публикации, заявки на патент, патенты и другие источники, упомянутые в данном документе, заключены во всей своей полноте посредством ссылки. В случае противоречий настоящее описание, включая определения, будет иметь первостепенное значение.
Термин «контроллер» используется традиционным образом для обозначения любой структурной аппаратной или программной установки, имеющей возможность исполнения программной логики для обеспечения некоторой основной функции. Специалисту в данной области техники обычно известно то, как использовать или реализовывать схему в контексте настоящего описания, с элементами процессора, объясненными ниже. Например, «контроллер подведения к погрузочно-разгрузочной площадке» содержит аппаратные и/или программные элементы, предназначенные для цели, как это дополнительно изображено в данном документе ниже, определения текущего положения грузового автомобиля.
Термин «программная логика» используется традиционным образом для обозначения функциональных инструкций, которые могут быть воплощены в аппаратных или программных структурах, которые управляют схемой для предназначенного функционального действия.
Термин «сигнальная линия» используется традиционным образом для обозначения информации, обмениваемой через передачу сигналов, которая может принимать форму закодированных сигналов, аналоговым или цифровым способом посредством любого традиционного устройства связи, где не исключается, что доступны другие сигнальные линии, а приведена всего лишь для обозначения того, что доступна некоторая возможность соединения. Этот термин может также указывать косвенную возможность соединения, то есть сигнальная линия может быть обеспечена посредством косвенной передачи сигналов, например, через другое функциональное устройство.
Термин «пользовательский интерфейс» может содержать один или более элементов аппаратного обеспечения, выполненных с возможностью выполнения функциональных действий в соответствии с настоящими системами и способами, в частности, для предоставления сигналов управления в различные другие модульные компоненты. Процессор может быть выделенным процессором для функционирования в соответствии с настоящей системой или может быть универсальным процессором, в котором только одна из многих функций задействуются для функционирования в соответствии с настоящей системой. Процессор может функционировать с использованием части программы, множества участков программы, или может быть аппаратным устройством, использующим выделенную или универсальную интегральную схему. Может использоваться любой тип процессора, в частности выделенный или совместно используемый. Процессор может включать в себя микроконтроллеры, центральные блоки обработки (CPU), цифровой(ые) сигнальный(ые) процессор(ы) (DSP), ASIC или любой(ые) другой(ие) процессор(ы) или контроллер(ы), такие как цифровые оптические устройства, или аналоговые электрические схемы, которые выполняют одни и те же функции и используют электронные методики и архитектуру. Контроллер или процессор могут дополнительно содержать запоминающее устройство, которое может быть частью или может быть функционально соединено с контроллером. Запоминающее устройство может быть любым подходящим типом запоминающего устройства, в котором хранятся данные. Любой носитель, известный или разрабатываемый, который может хранить и/или передавать информацию, подходящую для использования с настоящими системами и способами, может использоваться в качестве запоминающего устройства. Запоминающее устройство может также хранить предпочтения пользователя и/или данные приложений, доступные контроллеру для конфигурирования его на выполнение функциональных действий в соответствии с настоящими системами и способами.
Несмотря на то, что изображены примерные варианты осуществления для систем и способов, также альтернативные варианты могут быть предусмотрены специалистами в уровне техники, которые обладают преимуществом настоящего раскрытия для достижения подобной функции и результата. Например, некоторые компоненты могут быть объединены или разделены на один или более альтернативных компонентов. Наконец, эти варианты осуществления предназначены всего лишь для иллюстрации настоящей системы и не должны рассматриваться в качестве ограничения прилагаемой формулы изобретения до какого-либо отдельно взятого варианта осуществления или группы вариантов осуществления. Таким образом, несмотря на то, что настоящая система была описана в частных подробностях со ссылкой на конкретные примерные варианты ее осуществления, следует также понимать, что многочисленные видоизменения и альтернативные варианты осуществления могут быть разработаны средними специалистами в уровне техники без отступления от объема настоящих систем и способов, изложенных в последующей формуле изобретения. Описание и чертежи должны соответственно расцениваться в качестве иллюстративных и не должны подразумеваться в качестве ограничивающих объем прилагаемой формулы изобретения.
На Фигуре 1 и Фигуре 2 изображены общие реализации вариантов осуществления согласно настоящему изобретению, в которых текущее положение грузового автомобиля 100 определяют посредством внебортового сканера 10, 20 для транспортного средства, который установлен в фиксированном положении относительно погрузочно-разгрузочной станции 15, 25. На Фигуре 1 вариант осуществления является 2-D сканером 10, который имеет преимущество в меньшей дороговизне оборудования и меньшей интенсивности обработки данных. 3-D сканер 20 на Фигуре 2 обладает в качестве преимущества тем, что грузовой автомобиль и связанная ориентация видимы всегда. Следует отметить, что такие 2-D или 3-D сканеры известны как таковые и приведены в данном документе в качестве примера, обозначенного как «сканеры транспортного средства» с указанием их функции сканирования и идентификации транспортного средства в наборе данных сканирования. Сканеры транспортного средства имеют предпочтительно лазерный тип сканирования, но могут также быть оснащены различными средствами, например, акустическими, или камерами, оборудованными программным обеспечением распознавания объектов. Лазерный сканер обычно имеет разрешение менее 10 см, или даже менее 5 см, что является важным преимуществом для точного подведения к погрузочно-разгрузочной площадке грузового автомобиля, в частности прицепа 50.
2-D или 3-D сканер 10, 20 для транспортного средства создает данные сканирования 2-D, 3-D, образованные наборами углов отражения и соответствующих расстояний отражения. Данные сканирования, обозначающие набор лазерных отражений (2-D или 3-D углы и расстояние отражения) анализируются для определения по меньшей мере контрольной точки прицепа и ориентации прицепа. Контрольная точка и ориентация прицепа передаются в контроллер подведения к погрузочно-разгрузочной площадке для обновления текущего положения грузового автомобиля, и в контроллер подведения к погрузочно-разгрузочной площадке подаются ориентация прицепа и контрольная точка. Контроллер подведения к погрузочно-разгрузочной площадке может быть воплощен в программном обеспечении и/или аппаратном обеспечении и может быть бортовым или внебортовым по отношению к грузовому автомобилю. Он рассчитывает параметры рулевого управления и управления движением транспортного средства, необходимые для осуществления рулевого управления и управления движением транспортного средства для инструкций контроллера подведения к погрузочно-разгрузочной площадке, то есть согласно свободной от столкновений траектории, которая подведет к погрузочно-разгрузочной площадке транспортное средство в назначенной погрузочно-разгрузочной площадке транспортного средства.
На Фигуре 3 показан грузовой автомобиль 100, идентифицированный сканером 10, при этом обеспечена ориентация О прицепа и контрольная точка Р прицепа. Несмотря на то, что ориентация О предпочтительно совпадает с осью длины прицепа и контрольная точка Р прицепа с угловой точкой прицепа, в частности задней угловой точкой прицепа, это не является обязательным, и может существовать объединение следующего, например, ориентация ортогональна к оси длины или выровнена с валом рулевого управления, при этом контрольная точка может быть валом рулевого управления или задним колесом.
На Фигуре 4 изображен дополнительный вариант осуществления. Несмотря на то, что контроллер 30 подведения к погрузочно-разгрузочной площадке может осуществлять связь с помощью односторонней связи со сканером 10 транспортного средства с помощью сигнальных линий С, устанавливающих предпочтительно беспроводную связь, предпочтительно установление двусторонней связи, например, через Wi-Fi, для осуществления связи с системой обработки на стороне погрузочно-разгрузочной площадки. Контроллер 30 подведения к погрузочно-разгрузочной площадке может быть беспроводным образом соединен с системой 11 управления складского помещения, управляющей упомянутым сканером транспортного средства. Данная система управления складского помещения может быть выполнена с возможностью вычисления свободной от столкновений траектории и управления по времени грузового автомобиля для автономного управления движением грузового автомобиля вдоль упомянутой свободной от столкновений траектории согласно упомянутому управлению по времени. Однако для вычисления упомянутой свободной от столкновений траектории могут также использоваться и бортовые контроллеры, или сочетание обоих.
Преимущественно, контрольная точка Р определяется из графика сканера, как показано на Фигуре 5а, изображающем график сканера, причем задняя угловая точка Р указана на графике для ясности. График сканера получается посредством внебортового 2-D или 3-D сканера для транспортного средства, который установлен в фиксированном положении относительно погрузочно-разгрузочной станции для подведения к погрузочно-разгрузочной площадке грузовых автомобилей с прицепами. Сканер транспортного средства соответственно создает данные сканирования, обозначающие набор, который может быть проанализирован для определения задней угловой точки прицепа и ориентации прицепа. Для управления в автоматической системе подведения к погрузочно-разгрузочной площадке согласно настоящему изобретению контроллер рулевого управления снабжен обнаруженным положением Р задней угловой точки прицепа относительно погрузочно-разгрузочной площадки. Поскольку отсутствуют какие-либо датчики, которые могли бы измерить этот желаемый признак непосредственно, он должен быть сформирован из других считанных данных, таких как выходной результат лазерного сканера. В частности, текущее положение грузового автомобиля определяется посредством сканера для транспортного средства, который создает данные сканирования, например, в таком виде, как изображено на Фигуре 1. Сканер установлен в фиксированном положении относительно погрузочно-разгрузочной станции. Сканер для транспортного средства выполнен с возможностью создания данных сканирования, которые анализируются для определения задней угловой точки прицепа, и эта задняя угловая точка передается (например, через WiFi) в контроллер рулевого управления для обновления текущего положения грузового автомобиля. Следует заметить, что в ECU 11, расположенном на погрузочно-разгрузочной площадке, сначала геометрическое преобразование из контрольной точки Р (задней угловой точки) середина оси А рассчитывается перед отправкой в ECU автоматического управления подведением к погрузочно-разгрузочной площадке на борту грузового автомобиля. Для ссылки см. также Фигуру 10.
Кроме того, в качестве необязательной возможности, контрольная точка может быть рассчитана или проверена, например, посредством фильтрования по типу Кальмана, от других датчиков, например, в областях, где сканер не может сканировать. Например, когда прицеп проходит окончательное итоговое расстояние, где находится погрузочно-разгрузочная площадка, то контрольное положение может быть дополнительно измерено традиционным средством, например, бортовыми датчиками парковки, кодерами ABS и ускорителями. Эти дополнительные датчики могут также использоваться для оптимизации взаимодействия с водителем; например, посредством сглаживания ускорения или действия по рулевому управлению согласно заданным ограничениям. Информация, полученная от лазерного сканера, является расстоянием, на котором отражается каждый луч в области просмотра лазера. Поскольку угол каждого луча известен, то эти данные в полярных координатах могут быть преобразованы в набор точек в плоскости (х, у), в которой лазерный сканер находится в начале координат, как показано на Фигуре 5А. Для получения необходимой информации для управления алгоритм обработки затем находит прицеп в этом наборе точек, то есть получает местоположение угла прицепа (точка Р) и угол ориентации прицепа со ссылкой на погрузочно-разгрузочную площадку, у.
Для нахождения положения и для направления прицепа, сначала набор точек, фактически принадлежащих этому объекту (относящемуся к интересующей области А), фильтруется из оставшихся данных. Когда множество грузовых автомобилей и прицепов могут присутствовать в окружении, анализ начинается в приблизительном положении грузового автомобиля, так что корректное транспортное средство может быть отслежено. В частности, данные сканирования предварительно фильтруются контроллером для определения приблизительного положения прицепа транспортного средства из предварительно отфильтрованного набора данных. Это может, например, быть сделано посредством сигнального устройства, которое сигнализирует положение грузового автомобиля и соединено с контроллером рулевого управления, например, через свои координаты GPS или из маркерного сигнала, который может быть сформирован из данных датчика. Например, упомянутое предварительное фильтрование обеспечивается посредством согласования упомянутых данных сканирования с координатой GPS грузового автомобиля, предоставленной датчиком GPS грузового автомобиля. Упомянутые данные GPS передаются посредством контроллера 15 подведения к погрузочно-разгрузочной площадке во внебортовой сканер 10 для транспортного средства и в процессор 11 блока управления двигателем на стороне погрузочно-разгрузочной площадки, который обрабатывает данные сканера. Процессор 11 на стороне погрузочно-разгрузочной площадки и контроллер 30 подведения к погрузочно-разгрузочной площадке могут обмениваться частями обработки.
Как только прицеп идентифицирован сканером 10 для транспортного средства и/или посредством соответствующей обработки в процессоре 11 на стороне погрузочно-разгрузочной площадки, он может быть зафиксирован, посредством последующего анализа захваченных кадров, и могут быть выбраны только те точки, которые согласуются с предварительно определенным ограничением, сформированным из мгновенного перемещения транспортного средства; так чтобы прицеп был зафиксирован. С использованием данной первоначальной оценки положения некоторый набор точек может быть отфильтрован в окружающем данное положение блоке, с размером на основе точности оценки. Кроме того, чтобы отфильтровать тягач или возможные другие ближайшие объекты, можно использовать сведения, которые лазерный сканер сканирует в одном направлении и таким образом заполняет массив точек слева направо или справа налево. Это означает, что измерения одного и того же твердого объекта находятся в смежных положениях в массиве точек. Между различными объектами, при наличии промежутка достаточного размера, несколько лучей не будут отражаться обратно, предоставляя возможность алгоритму определить то, где множество точек, принадлежащих прицепу, заканчивается. При отслеживании грузового автомобиля в последовательных кадрах центральное положение из предыдущего кадра может использоваться в качестве оценки на начальном этапе фильтрования.
Таким образом, данные сканирования предварительно фильтруются контроллером для определения приблизительного положения прицепа транспортного средства из предварительно отфильтрованного набора данных. Контроллер согласовывает найденный прицеп транспортного средства с одним из некоторого количества сценариев видимости, в котором одна или более сторон прицепа транспортного средства видимы, посредством подгонки линии через данные или, при превышении некоторого уровня ошибок, вычисления местоположения угловой точки и подгонки линии через точки данных для каждой из двух видимых сторон. Таким образом, после того, как получено правильное множество точек, контроллер определяет из предварительно отфильтрованных данных один набор точек данных, образующих соответствующий линейный участок; или, при превышении уровня ошибок, множество наборов точек данных, образующих множество соответствующих линейных участков, принадлежащих множеству средних значений. Алгоритм интерпретирует оставшиеся точки для определения того, какая часть прицепа видима, и в какую сторону обращен прицеп, таким образом, наборы точек данных согласуются с одним из некоторого количества сценариев видимости, в которых одна или более сторон прицепа транспортного средства видимы. Например, с использованием двумерного лазерного сканера по большей мере две стороны прицепа могут быть видимыми, что в результате приводит к четырем различным сценариям видимости, как изображено на Фигуре 5 В. То есть, исходя из предположения, что прицеп закрыт или заполнен грузом так, что лазерный сканер не может «заглянуть» в прицеп.Следует заметить, что «закрытый» прицеп не является предпосылкой предложенной методики определения местоположения. В базовом случае также и другие сканируемые геометрические формы могут быть определены с использованием подобного немного измененного алгоритма. Через предложенную связь по WiFi важная геометрическая и другая информация о прицепе может преимущественно быть предоставлена в алгоритм подведения к погрузочно-разгрузочной площадке. Для обычного прямоугольного прицепа лазерный сканер может видеть любо длинную сторону (случай 1), короткую сторону (случай 2), либо как длинную, так и короткую стороны (случай 3, соответственно случай 4) прицепа. Когда две стороны видимы, то нужно различать, находится ли длинная сторона слева или справа (то есть различать случай 3 и 4). Это может быть сделано посредством отслеживания линейного участка вдоль кадров и расчета для обеих сторон самого длинного линейного участка на основе видимых линий и сформированной ориентации прицепа. Угловая точка Р и фактическое положение транспортного средства могут впоследствии быть сформированы посредством согласования упомянутых ортогональных направлений со сценарием видимости прицепа; причем один из этих сценариев выбирается в качестве оптимального сценария для определения угловой точки прицепа; при этом угловая точка формируется из согласования.
Пример набора измерительных точек, принадлежащих прицепу, изображен на Фигуре 6А, на которой изображен обычный сценарий 3 видимости. Чтобы определить, какой из трех случаев с Фигуры 5В имеет место, линии подгоняются через набор точек с использованием методики подгонки через ошибки наименьших квадратов. Например, в качестве способа подгонки линий через набор точек, представляющих собой одну или две стороны тела грузового автомобиля или прицепа, может использоваться шаблонная форма, которая согласуется с формой данной части транспортного средства. Правильное положение и ориентация прицепа могут быть найдены посредством процедуры оптимизации, которая оптимизирует объективную функцию, которая описывает, насколько хорошо форма совпадает с облаком точек для возможных вариантов помещения шаблонной формы.
На Фигуре 6В изображен эффективный способ расчета упомянутой угловой точки Р посредством расчета для каждой пары элементов данных сканирования, имеющих смежные углы отражения, относительного угла линейного участка, взаимно соединяющего упомянутую пару элементов данных сканирования, как показано на Фигуре 6В. Данный подход избегает множества итеративных обработок и может преимущественно использоваться для непосредственного получения угла ориентации прицепа.
Затем вычисляется остаток (сумма квадратов ошибок). Если остаток превышает конкретную пороговую величину, то точки не лежат на линии, таким образом множество сторон прицепа должны быть видимыми. Когда точки действительно лежат на линии, случай 1 можно отличить от случая 2 на основе длины линии или на основе предыдущей ориентации (медленно движущийся прицеп не может перейти от случая 1 к случаю 2 за долю секунды).
Когда точки не лежат на линии, алгоритм определяет, где находится угловая точка прицепа посредством разделения набора данных на два отдельных набора. Различие впоследствии делается для определения сценария 3 или 4, то есть для последующего определения того, находится ли длинная сторона прицепа на левой или правой стороне. Поскольку линейные участки могут быть отслежены в последовательных кадрах, то могут использоваться их известные длины или ориентация в предыдущем кадре (следует заметить, что прицеп не может переходить между случаями 3 и 4 за долю секунды). Эффективно это означает, что, в течение первого измерения, достаточно большая часть прицепа должна быть видимой для определения того, где находятся длинная и короткая сторона прицепа, наряду с указанием того, в какую сторону обращен грузовой автомобиль (что не может всегда быть определено только из одного лазерного измерения). После начального измерения прицеп может отслеживаться в следующих кадрах посредством распространения предыдущей ориентации и направления движения.
Чтобы определить местоположение угловой точки (или точки разделения) для случаев 3 и 4, используется угол ориентации (со ссылкой на ось X) линейных участков, соединяющих две смежных точки данных. Для каждой стороны прицепа данный угол является приблизительно постоянным (al и a2 на Фигуре 6А). В угловой точке Р, в ориентации возникает переход на девяносто градусов. Данный переход может преимущественно использоваться посредством определения срединного угла от левой стороны облака точек, а также и от правой стороны (см. Фигуру 6В). Для одной из сторон прицепа середина от левой стороны массива будет подходящим вариантом (приблизительно равным a1), в то время как для другой стороны середина от правой стороны массива является подходящим вариантом (приблизительно равным а2).
На Фигуре 7В изображен дискретный переход между последующими углами, указывающими угловую точку, который может быть получен посредством вычисления суммы абсолютных расстояний до левого среднего значения, начиная с левой стороны массива, и суммирования расстояний до правого среднего значения от правой стороны массива (как показано на Фигуре 7А). В точке разделения сложение этих двух сигналов продемонстрирует явно различимый минимум в фактической угловой точке прицепа, как изображено на Фигуре 7 В, для набора точек, изображенного на Фигуре 7А. Таким образом, для каждой пары элементов данных сканирования, имеющих смежные углы отражения, относительный угол рассчитывается из линейного участка, взаимно соединяющего упомянутую пару элементов данных сканирования. Соответственно, угловая точка рассчитывается из минимальной суммы первых ошибок, рассчитанных из первого среднего значения, соответствующего первому из упомянутых двух соответственных линейных участков в двойном наборе точек данных, и вторых ошибок, рассчитанных из второго среднего значения, соответствующего второму из упомянутых двух соответственных линейных участков в двойном наборе точек данных. То есть, последующий угол отражения и расстояние отражения, соответствующие минимальной ошибке, выбираются в качестве угловой точки Р.
Как только точка разделения и ориентация прицепа известны, местоположение заднего вала прицепа может быть определено. Данное положение наряду с недавно найденным углом ориентации затем отправляется в грузовой автомобиль для управления, и затем распространяется на следующий кадр, в котором снова запускается процедура подгонки прицепа.
ДОПОЛНИТЕЛЬНЫЕ ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ
На Фигурах 8, 9 и 10 изображено примерное планирующее управление планированием свободной от столкновений траектории;
и маневрирование грузовым автомобилем посредством упомянутого контроллера подведения к погрузочно-разгрузочной площадке согласно упомянутой свободной траектории. Для планирования траектории, которую может проехать прицеп грузового транспортного средства с прицепом, данная траектория должна учитывать кинематические ограничения транспортного средства, то есть ограничение движения в некотором направлении и минимальный радиус поворота.
Эффективный способ получить возможную траекторию в точной формулировке состоит в том, чтобы построить данную траекторию из линий и окружностей и соединить эти части с использованием, так называемых, маневров по изгибу и вытягиванию. При движении по прямой линии или окружности угол сцепки транспортного средства является постоянным. Известно упрощение решения до дифференциальных уравнений, описывающих уравнения движения, делающих возможным точное решение, как упомянуто в документе Svesta, приведенном выше. Дополнительно, постоянный угол сцепки означает, что никакого дополнительного рулевого управления не требуется. В одном варианте осуществления, скорость транспортного средства увеличивается на участках, где угол сцепки сохраняется постоянным, не нарушая ограничения по скорости поворота рулевого колеса, необходимого для следования по траектории. Наоборот, скорость транспортного средства понижается в соединительной фазе, где угол сцепки не является постоянным.
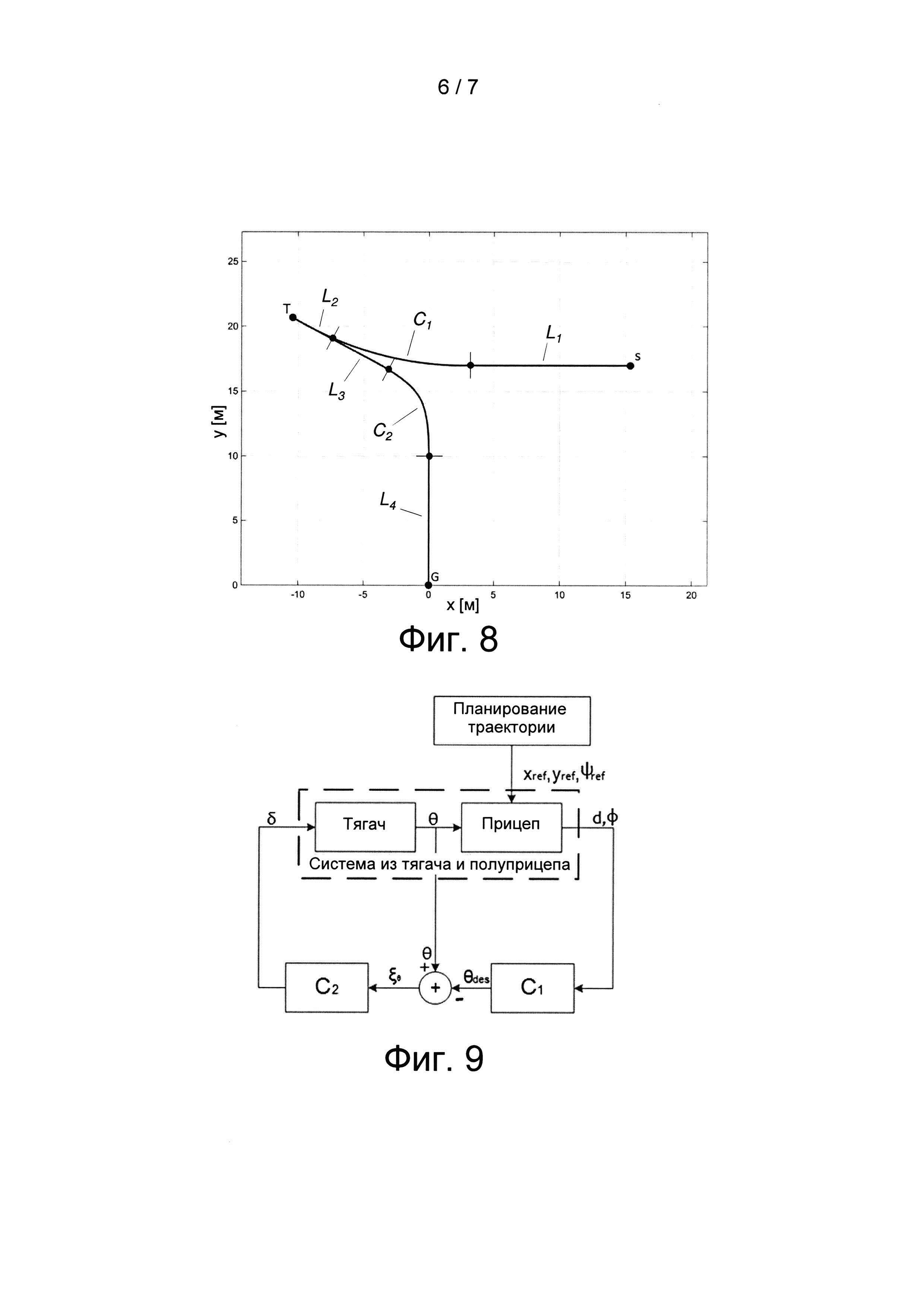
Наиболее распространенный маневр подведения к погрузочно-разгрузочной площадке грузового автомобиля с полуприцепом и тягачом состоит из траектории движения вперед до точки поворота, за которым следует обратное движение к погрузочно-разгрузочной площадке. Такая траектория (описывающая движение заднего вала прицепа) может строиться посредством взаимно соединенных линий и окружностей, то есть упомянутая траектория образуется из участков, где угол сцепки сохраняется постоянным. Пример такой траектории приведен на Фигуре 8, где начальная точка указана через S, точка поворота указана через Т, и целевое положение указано через G. В частности, маневрирование грузовым автомобилем осуществляется посредством упомянутого контроллера подведения к погрузочно-разгрузочной площадке согласно свободной от столкновений траектории L1, С1… С2, L4 посредством ориентирования прицепа через управление углом сцепки между прицепом и грузовым автомобилем. Угол сцепки сохраняется постоянным для каждого участка L1, С1… L4, пока не будет определенно предварительно заданное максимальное отклонение свободной траектории. Для отслеживания контрольной траектории прицепа может использоваться каскадная структура управления, например, как показано на Фигуре 9. Данный контроллер использует внешнее измерение ориентации прицепа и положение контрольной точки. Наружный контур управления рассчитывает желаемый угол Θ ориентации прицепа на основе бокового отклонения (d) между контрольной точкой S и контрольной траекторией - измеренное из ориентации оси длины прицепа и ошибки в ориентации ϕ прицепа. Данный предложенный угол сцепки затем прослеживается во внутреннем контуре управления посредством осуществления рулевого управления передними колесами тягача.
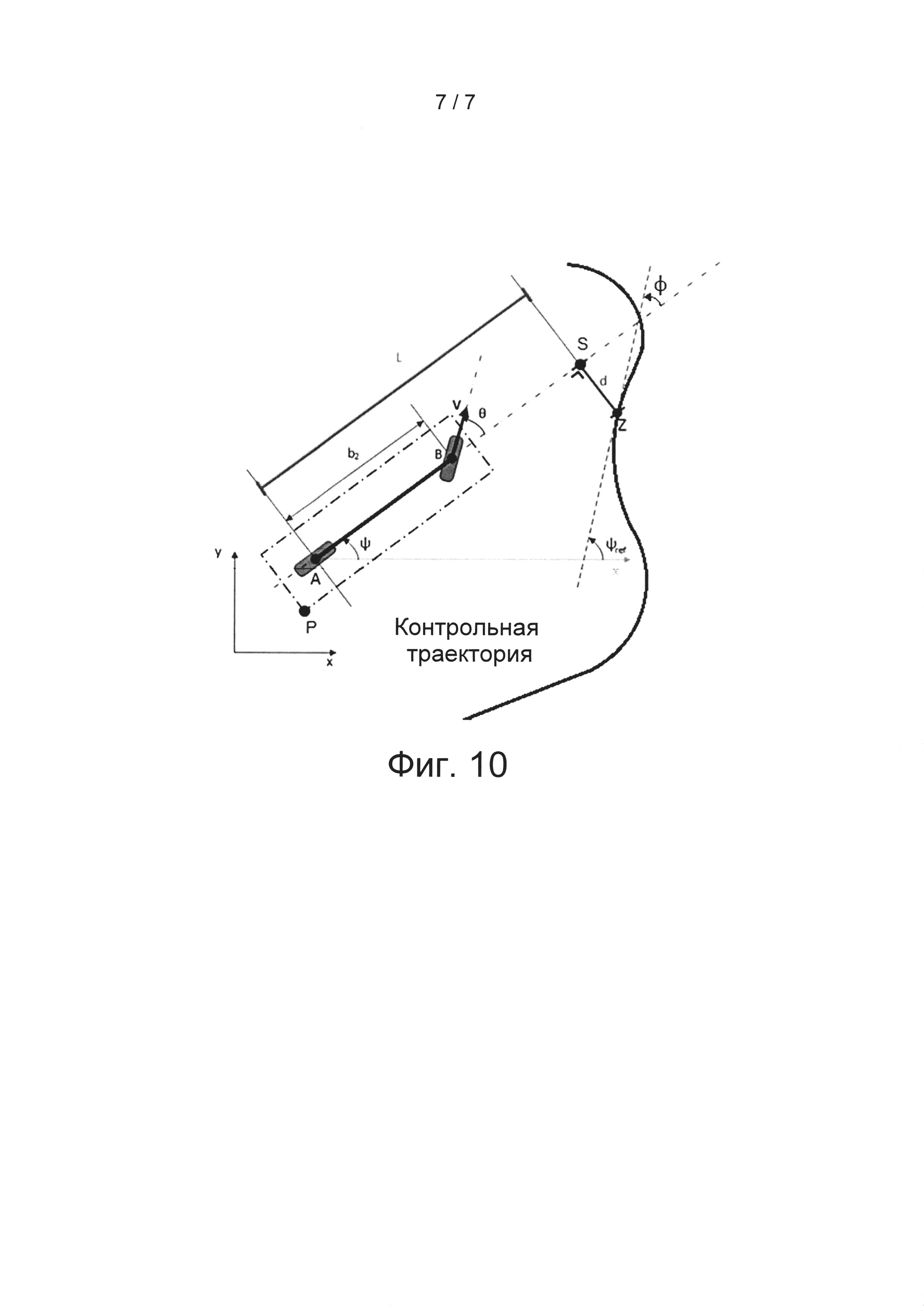
На Фигуре 10 изображено схематическое представление прицепа в виде велосипеда. В данном представлении смешиваются задние валы прицепа, и тягач (грузовой автомобиль) представлен подвергаемым рулевому управлению передним колесом прицепа. Отклонение d рассчитывается от контрольной точки S, например, контрольной точки, имеющей фиксированное геометрическое соотношение относительно угловой точки Р, которая формируется из данных сканера. На чертеже изображено, что в велосипедном представлении угловая точка Р связана со средней точкой А вала и упреждающей точкой S.
Боковое отклонение d и ошибка направления движения по отношению к траектории наблюдается в упреждающей точке S. В одном варианте осуществления упреждающая точка S зависит от скорости транспортного средства. Такая упреждающая точка S может улучшить функционирование системы с точки зрения устойчивости и гашения колебаний. Посредством просмотра расстояния L в прямом или обратном направлениях, то есть, например, относительно среднего заднего вала при управлении движением вперед, или позади заднего вала при управлении движением в обратном направлении, гашение колебаний в системе улучшается. Увеличение упреждающего расстояния дополнительно увеличивает гашение колебаний в системе, но может также ввести угловое сокращение в случае изогнутой контрольной траектории, что может наложить ограничение на расчет максимального упреждающего расстояния.
Реферат
Группа изобретений относится к области транспортного машиностроения. Система для направления моторного транспортного средства содержит контроллер подведения к погрузочно-разгрузочной площадке, соединенный с системой рулевого управления транспортного средства, внебортовой сканер для транспортного средства и передатчик. Сканер для транспортного средства создает данные сканирования для определения контрольной точки транспортного средства и его ориентации. Передатчик подает в контроллер подведения к погрузочно-разгрузочной площадке местоположение контрольной точки и ориентацию транспортного средства. Способ направления моторного транспортного средства на основе данных изображения к погрузочно-разгрузочной станции включает этапы, на которых: определяют текущее положение транспортного средства; принимают свободную от столкновений траекторию; осуществляют маневрирование транспортным средством. Достигается повышение надежности автономного подведения транспортного средства к погрузочной платформе. 2 н. и 14 з.п. ф-лы, 13 ил.
Формула
Документы, цитированные в отчёте о поиске
Системы опознавания и наведения при парковке воздушных судов
Патенты аналоги
Системы опознавания и наведения при парковке воздушных судов
Комментарии