Оптическое устройство для определения расстояний до объекта - RU2626973C1
Код документа: RU2626973C1
Чертежи






Описание
Область техники, к которой относится изобретение.
Данное изобретение относится к области измерения расстояний до объекта с помощью электромагнитных волн, а более конкретно к оптическим устройствам для определения расстояний до объекта, включающим в себя источник излучения на объект модулированного бинарного оптического сигнала, генератор создания зондирующей последовательности, генератор тактового сигнала, светочувствительный элемент детектирования отраженного оптического сигнала от объекта, блок интегрирования, модуль вычисления корреляции излученного и отраженного сигналов модуль порогового обнаружения сигнала, модуль вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, блок вычисления временной задержки отраженного сигнала, и может быть использовано, например, в навигации, в том числе беспилотных летательных аппаратов, а также в лазерной локации при одновременной работе множества синхронизированных по времени подобных систем.
В данном описании используются следующие термины:
АЦП - аналого-цифровой преобразователь.
КМОП (комплементарная структура металл-оксид-полупроводник; англ. CMOS, complementary metal-oxide-semiconductor) - технология построения электронных схем. Отличительной особенностью схем КМОП по сравнению с биполярными технологиями является очень малое энергопотребление в статическом режиме (в большинстве случаев можно считать, что энергия потребляется только во время переключения состояний). КМОП-схемы обладают высокой скоростью действия и низким энергопотреблением.
ЛАДАР (LADAR) - лазерный локатор, сокращение от русского или английского варианта «лазерный радар», где радар от англ. radar (radio detection and ranging) - радиообнаружение и дальнометрия.
ЛИДАР (транслитерация LIDAR англ. Light Identification Detection and Ranging - световое обнаружение и определение дальности) - технология получения и обработки информации об удаленных объектах с помощью активных оптических систем, использующих явления отражения света и его рассеяния в прозрачных и полупрозрачных средах. Лидар как прибор представляет собой, как минимум, активный дальномер оптического диапазона. Обычно в России подобные устройства называются лазерными дальномерами и лазерными локаторами.
Псевдослучайные (псевдошумовые) последовательности - это полностью детерминированные цифровые последовательности, которые внешнему наблюдателю они кажутся случайными.
Мультиплексирование сигналов - уплотнение канала, т.е. передача нескольких потоков сигналовданных по одному каналу.
Демультиплексирование сигналов - обратная операция.
ВКФ - взаимнокорреляционная функция. Пример ВКФ:
Это математическая операция, мера подобия 2-х сигналов (опорного y(t) и принимаемого x(t)), точка максимума корреляционной функции соответствует точке минимального квадратичного отклонения между сигналами х и у.
Дополнительные последовательности
Известны дополнительные последовательности, (См. Варакин Л.Е. - «Системы связи с шумоподобными сигналами» М.: Радио и связь, 1985.)
Последовательности {ап} и




Например, последовательности:
{+1+1.+1.-1+1+1,-1+1}
{+1,+1,+1,-1,-1,-1+1,-1}
являются дополнительными.
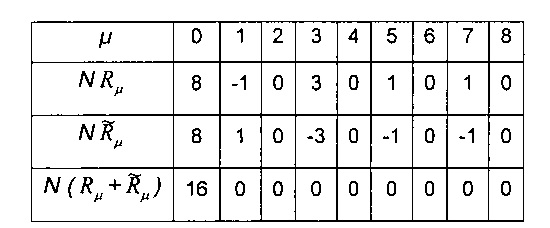
Значения их автокорреляционных функций сумма их АКФ приведены в табл. 1.
Пример дополнительных последовательностей, которыми являются D-коды приведен далее в примере №1.
Уровень техники
Измерение расстояний до объектов производится путем отправления оптического сигнала, например, лазерного излучения, получения отраженного сигнала, определения времени запаздывания и вычисления по нему расстояния.
Так в патенте US 8537218, опубликован в 2013 г.описан метод определения расстояний до объекта по задержке времени, то есть определения расстояния от некогерентного источника излучения до ячейки приемной матрицы, основанный на измерении времени прохождения излученного импульса некогерентного излучения фиксированной длительности Т0, при этом импульс излучается периодически. Приемная матрица и излучатель расположены рядом. Метод измерения основан на том, что точное расстояние до поверхности объекта определяется как время прохождения фронта излучаемого импульса до поверхности и отраженного от нее импульса до ячеек приемной матрицы (в иностранной патентной литературе обозначается как TOF - time of flight), умноженное на С/2 (С - скорость распространения электромагнитного излучения).
Метод определения TOF состоит в том, что априори известен интервал значений TOF=T1+dt, где dt может изменяться от T1 до T1+То, Согласно патента US 8537218, ячейка (пиксел) приемной матрицы содержит один элемент генерирующий фототок (photo gate) и две структуры (КМОП/МДП) способные накапливать, удерживать и удалять заряд Q. Для определения dt в период времени [T-1, T1+Т0], под воздействием управляющих сигналов фоток поступает через transfer gate 1 на накопитель заряда Q1, а в период времени T1+Т0, Ti+2*Т0] поступает через transfer gate 2 на накопитель заряда Q2. Накопители зарядов выполняют функцию интеграторов фототока на отрезках Т0. Draining gates используются для быстрого удаления накопленных зарядов Q1 и Q2. Значения накопленных зарядов Q1 и Q2 используются для определения dt путем следующего вычисления:
dt=T0(Q2/(Q1+Q2)).
Данный метод, как правило, используется для определения расстояния до поверхности объектов в тех случаях, когда Т1 меньше или, по крайней мере, кратно соразмерим по порядку с Т0 величины. В классификации, приведенной в справочнике «Handbook of 3D Machine Vision - Optical Metrology and Imaging* под редакцией Song Zhang, опубликованным в 2013 г., данный метод назван, как «Time-Dependent Charge Detection*, что можно перевести, как определение заряда, зависящего от времени пролета (TOF). Частота периодического накопления заряда Q в ячейках подобной приемной матрицы может достигать 10-20 МГц.
Известно из уровня техники оптическое устройство для определения расстояний до объекта, включающее в себя:
- источник излучения на объект модулированного бинарного оптического сигнала, вход которого соединен с
- выходом генератора создания зондирующей последовательности, вход которого соединен с
- выходом генератора тактового сигнала,
- светочувствительный элемент детектирования отраженного оптического сигнала от объекта, выход которого соединен с
- входом блока интегрирования, выход которого соединен с
- входом модуля вычисления корреляции излученного и отраженного сигналов, а
- выход модуля вычисления корреляции сигналов соединен с входом модуля порогового обнаружения сигнала, выход которого соединен с
- входом модуля вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, содержащего блок вычисления временной задержки отраженного сигнала, выход указанного модуля соединен с входом генератора создания зондирующей последовательности, см патент РФ на изобретение №2577079 опубликованный 10.03.2016 г.
Данное устройство является наиболее близким по технической сути и достигаемому техническому результату и выбрано за прототип предлагаемого изобретения как устройства.
Недостатком этого прототипа является то, что как только одновременно используется несколько таких оптических устройств, каждое из которых излучает на объект модулированный бинарный оптический сигнал, то вместо того, чтобы зафиксировать «свой» отраженный сигнал, может быть зафиксирован сигнал, который излучен другим устройством. Это могут быть, например, оптические устройства, установленные на самосвалах работающих в карьере без доступа людей. Или это несколько роботов ведущих наступление или несколько оптических устройств, установленных на одном транспортом средстве, при этом сектора обзора их пересекаются. Все это приводит к ошибкам при определении расстояния до объекта.
Раскрытие изобретения
Настоящее изобретение, главным образом, имеет целью предложить оптическое устройство для определения расстояний до объекта, позволяющее, по меньшей мере, сгладить, как минимум, один из указанных выше недостатков, а именно обеспечить максимальное подавление взаимного влияния зондирующих сигналов оптических устройств на определение ими дальностей до зондируемых объектов в группе одновременно работающих по одним и тем же зондируемым объектам в одном и том же частотном (оптическом) диапазоне оптических устройств, что и является поставленной технической задачей.
Для достижения этой цели оптическое устройство для определения расстояний до объекта, дополнительно включает в себя:
- первый блок накопления, вход которого соединен с выходом блока интегрирования, а выход соединен с входом модуля вычисления корреляции сигналов,
- эталонный источник сигналов точного времени и частоты, выход которого соединен с входом
- блока формирования синхроимпульса на начало цикла зондирования в один и тот же момент времени на разных оптических устройствах, второй вход которого соединен с выходом генератора тактового сигнала, а выход блока соединен с входом
- блока подсчета циклов зондирования, выход которого соединен с входом
- блока выборки и обработки зондирующих сигналов, выходы которого соединены с входом генератора создания зондирующей последовательности, входом модуля вычисления корреляции, входом первого блока накопления.
Благодаря данным выгодным характеристикам появляется возможность синхронизации работы различных оптических устройств по времени и такая организация модуляции излучаемых сигналов, которая не мешает одновременной работе оптических устройств по одним и тем же зондируемым объектам в одном и том же частотном (оптическом) диапазоне.
Существует вариант изобретения, в котором выход блока интегрирования соединен с входом аналогово-цифрового преобразователя сигнала со светочувствительного элемента в цифровой сигнал, выход которого соединен с входом модуля вычисления корреляции излученного и отраженного сигналов.
Благодаря данной выгодной характеристике появляется возможность использовать для обработки принимаемых сигналов в блоках накопления и блоке вычисления корреляции цифровые вычислители (процессоры) и запоминающие устройства.
Заметим, что в общем могут быть варианты изобретения, в которых не используется аналогово-цифровой преобразователь, а сигналы с блока интегрирования подаются непосредственно на устройство дискретно-аналоговой обработки сигналов, выполняющее функцию первого блока накопления и блока вычисления корреляции излученного и отраженного сигналов. Примером такого устройства может служить, например, разработанная в конце 80-х годов интегральная микросхема 528ХК1, содержащая аналоговое дискретное запоминающее устройство на 64 отсчета сигнала и могло вычислять корреляцию с псевдо шумовой бинарной последовательностью длины 32. За счет каскадирования ИМС длину псевдошумовой последовательности можно было увеличить до 1024.
Существует также вариант изобретения, в котором оптическое устройство для определения расстояний до объекта, дополнительно включает в себя второй блок накопления, первый вход которого соединен с выходом модуля вычисления корреляции сигналов, и второй вход с блоком выборки, и обработки зондирующих сигналов, а выход соединен с входом модуля порогового обнаружения сигнала.
Благодаря данной выгодной характеристике появляется возможность дополнительных вариантов для организации модуляции излучаемых сигналов, которая не мешает одновременной работе оптических устройств.
Существуют, кроме того, варианты изобретения, в которых выход аналогово-цифрового преобразователя соединен с входом мультиплексора, выход которого соединен с входом первого блока накопления, при этом выход второго блока накопления или выход модуля вычисления корреляции сигналов, соединен с входом демультиплексора, выход которого соединен с входом модуля порогового обнаружения сигнала.
Благодаря данной выгодной характеристике появляется возможность разделять сигналы после каскадного вычислителя (выполняющего функцию по вычислению корреляции сигналов) по их принадлежности к различным источникам.
Существует еще один вариант изобретения, в котором оно имеет блок конъюнкции сигналов, один вход которого соединен с выходом модуля вычисления расстояния до определяемого объекта по временные задержки отраженного сигнала, а другой вход, которого соединен с выходом генератора тактового сигнала, а выход блока конъюнкции сигналов соединен с входом блока интегрирования, и с входом аналогово-цифрового преобразователя, и с входом первого блока накопления.
Благодаря данной выгодной характеристике появляется возможность сократить затраты на вычисления, ограничив их минимумом, необходимым для определения расстояний до объектов в заданном диапазоне дальностей.
Существует также вариант изобретения, в котором эталонный источник сигналов точного времени и частоты содержит приемник точного времени и частоты, принимающий сигнал, как минимум от одного другого эталонного источника, расположенного удаленно, блок коррекции точного времени по местоположению оптического устройства и блок синхронизации и подстройки частоты эталонного источника сигналов точного времени и частоты.
Благодаря данной выгодной характеристике появляется возможность синхронизации по времени устройств с поправкой на их местоположение, которая связана с тем, что в разных местоположениях лидаров, время фиксации сигналов точного времени различное.
Существует кроме того вариант изобретения, в котором светочувствительный элемент детектирования отраженного оптического сигнала или само оптическое устройство или приемный тракт оптического устройства расположен на устройстве гироскопической стабилизации.
Благодаря данной выгодной характеристике появляется возможность расширения использования предлагаемого решения для транспортных средств, в частности для беспилотных летательных аппаратов, которые могут использовать предлагаемое решение в качестве основы технического зрения.
Существует возможный вариант изобретения, в котором светочувствительный элемент детектирования отраженного оптического сигнала имеет поляризационный фильтр, размещенный перед входом оптического сигнала на светочувствительный элемент.
Благодаря данной выгодной характеристике появляется возможность повышать соотношение сигнал/шум и, следовательно, повышать точность измерений расстояний до отражающих объектов.
Существует также вариант изобретения, в котором элементы светочувствительной матрицы размещены на матрице вместе с устройствами интегрирования в качестве которого применены КМОП или МДП (Металл-диэлектрик-полупроводник) структуры, интегрирующие фототок. Например, аналогичные описанным в патенте US 8537218.
Благодаря данной выгодной характеристике появляется возможность простого исполнения блока интегрирования, когда он выполнен в виде МДП/КМОП структур, позволяющих накапливать фототок в виде заряда.
Совокупность существенных признаков предлагаемого изобретения как устройства неизвестна из уровня техники для устройств аналогичного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения.
Краткое описание чертежей
Другие отличительные признаки и преимущества данного изобретения ясно вытекают из описания, приведенного ниже для иллюстрации и не являющегося ограничительным, со ссылками на прилагаемые рисунки, на которых:
фигура 1 схематически изображает функциональную схему предлагаемого оптического устройства согласно изобретению,
- фигуры 2, 4, 6, 7, 13, 14 изображают схемы каскадных вычислителей,
- фигуры 3, 5 изображают ВКФ,
- фигура 8 изображает импульсы излучаемого бинарного оптического сигнала и импульсы этого же сигнала, отраженного от объекта, результаты обработки принимаемого отраженного от объекта сигнала на различных стадиях обработки принимаемого отраженного сигнала.
- фигуры 9, 10, 11, 12 изображают сигналы в различных примерах, раскрытых далее.
Согласно фигуре 1 оптическое устройство для определения расстояний до объекта включает в себя источник 1 излучения на объект 2 модулированного бинарного оптического сигнала, вход которого соединен с выходом генератора 3 генератора создания зондирующей последовательности, вход которого соединен с выходом генератора 4 тактового сигнала, светочувствительный элемент 5 детектирования отраженного оптического сигнала от объекта, выход которого соединен с входом блока 6 интегрирования, выход которого соединен с входом аналогово-цифрового преобразователя 7 сигнала со светочувствительного элемента в цифровой сигнал, а выход аналогово-цифрового преобразователя 7 соединен с входом модуля 8 вычисления корреляции излученного и отраженного сигналов, а выход модуля 8 вычисления корреляции сигналов соединен с входом модуля 9 порогового обнаружения сигнала, выход которого соединен с входом модуля 10 вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, содержащего блок 11 вычисления временной задержки отраженного сигнала, выход указанного модуля соединен с входом генератора 3 создания зондирующей последовательности.
Оптическое устройство для определения расстояний до объекта, дополнительно включает в себя: первый блок накопления 12, вход которого соединен с выходом аналогово-цифрового преобразователя 7, а выход соединен с входом модуля 8 вычисления корреляции сигналов, эталонный источник 14 сигналов точного времени и частоты, выход которого соединен с входом блока 15 формирования синхроимпульса на начало цикла зондирования в один и тот же момент времени на разных лидарах, второй вход которого соединен с выходом генератора 4 тактового сигнала, а выход блока 15 соединен с входом блока 16 подсчета циклов зондирования, выход которого соединен с входом блока 17 выборки и обработки зондирующих сигналов, выходы которого соединены с входом генератора 3 создания модуляции зондирующего оптического сигнала, входом модуля 8 вычисления корреляции, входом первого блока 12 накопления, с входом модуля 10 вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала.
Оптическое устройство для определения расстояний до объекта, дополнительно может включать в себя второй блок накопления 13, вход которого соединен с выходом модуля 8 вычисления корреляции сигналов, а выход соединен с входом модуля 9 порогового обнаружения, второй вход которого соединен с выходом блока 17 выборки и обработки зондирующих сигналов Выход аналогово-цифрового преобразователя 7 может быть соединен с входом мультиплексора 18, выход которого соединен с входом первого блока 12 накопления, при этом выход второго блока 13 накопления соединен с входом демультиплексора 19, выход которого соединен с входом модуля 9 порогового обнаружения сигнала.
Оптическое устройство может опционально иметь блок 20 конъюнкции сигналов, один вход которого соединен с выходом модуля 10 вычисления расстояния до определяемого объекта по временные задержки отраженного сигнала, а другой вход, которого соединен с выходом генератора тактового сигнала 4, а выход блока конъюнкции сигналов соединен с входом блока 6 интегрирования, и с входом аналогово-цифрового преобразователя 7, и с входом первого блока накопления 12.
Эталонный источник 14 сигналов точного времени и частоты может опционально иметь блок 21 коррекции точного времени по местоположению оптического устройства, блок 22 подстройки частоты эталонного источника сигналов точного времени и частоты и блок 23 - приемник сигналов точного времени и частоты от удаленного источника излучения сигналов точного времени и частоты.
Блок 6 интегрирования может быть соединен с блоком 12 непосредственно.
Светочувствительный элемент детектирования отраженного оптического сигнала или само оптическое устройство или приемный тракт оптического устройства расположен на устройстве гироскопической стабилизации.
Светочувствительный элемент детектирования отраженного оптического сигнала может иметь поляризационный фильтр, размещенный перед входом оптического сигнала на светочувствительный элемент.
Светочувствительный элемент детектирования отраженного оптического сигнала от объекта может быть выполнен в виде элементов светочувствительной матрицы. Элементы светочувствительной матрицы могут быть размещены на матрице вместе с устройствами интегрирования, в качестве которого применены структуры типа металл-диэлектрик-полупроводник, интегрирующие фототок.
Осуществление изобретения
Оптическое устройство для определения расстояний до объекта работает следующим образом. Приведем наиболее исчерпывающий пример реализации изобретения, имея в виду, что данный пример не ограничивает применения изобретения.
Покажем это на различных примерах. Сперва, приведем пример дополнительных последовательностей, которыми являются D-коды.
Пример №1. D коды
Исходя из правила формирования D-кодов, возможно создать устройство их генерации основанное на формировании их по правилу присоединения.
Так для формирования пары дополнительных кодов d10={1,1} и d11={-1,1} можно использовать устройство из одного сумматора, одного вычитателя и устройства задержки последовательности на один такт (линия задержки на 1 такт), (на фиг. 13), задержка на один такт обозначена как, Z-1). Подав на это устройство единичный импульс, получим на выходе 1 указанного устройства, последовательность {1,1} а на выходе 2 {-1,1}
А для генерации 2-х пар дополнительных кодов d20, d21 и d22, d23 - соответственно потребуется устройство, приведенное на фиг. 14.
На выходе (1) получим последовательность d20={-1,1,1,1}
На выходе (2) получим последовательность d21={1,-1,1,1}
На выходе (3) получим последовательность d22={1,1,-1,1}
На выходе (4) получим последовательность d23={-1,-1,-1,1}
Из структуры соединений видно, что любую D-последовательность можно сгенерировать, используя соединения типовых элементов, состоящих из двух сумматоров (одного сумматора и одного вычитателя) и линии задержки на 2(i-1) тактов (где i=1,2,3 есть номер соответствующего каскада. Схема подобного устройства (каскада вычислителей) приведена на фиг. 4. Это же устройство пригодно и для вычисления корреляции с D кодами, считанными в обратном порядке. Для этого, на вход устройства нужно подать обрабатываемый сигнал, а с соответствующего выхода считывать вычисляемую ВКФ. Причем, каскадирование позволяет снизить необходимые вычисления, так для если N длина последовательности и N=2i где i это число последовательно соединенных каскадов, тогда для вычисления одного отсчета корреляции в каскадном вычислителе нужно 2*i операций сложения, а не 2i, как в случае прямого вычисления.
Одно и тоже устройство вычисления корреляции можно использовать для вычисления корреляции с дискретными сигналами, поступающими с нескольких каналов. Так если необходимо параллельно производить вычисления с М каналов, то число тактов задержки во всех линиях задержки, используемых в каскадном вычислителе в каждом из каскадов должно быть увеличено в М раз. Сигналы в каскадный вычислитель при этом подаются через мультиплексор, а считываются через демультиплнексор. Это позволяет упростить обработку и сократить объем используемой для вычислений ячеек памяти.
Пример №2
Оптические устройства (лидары) и зондируемые объекты могут находиться в движении, что при определенных условиях может приводить к ограничениям возможностей по накоплению принимаемых и обрабатываемых сигналов в первом и втором накопителях сигнала. Допустим, что лидар Л1 осуществляет 256 циклов зондирования без пауз. Длительность цикла зондирования составляет 30 мкс, что соответствует диапазону разрешаемых дальностей в 4.5 км. Таким образом, суммарное время зондирования объекта составляет 256×30=7.68 мс. Зондирующий оптический сигнал состоит из 256 позиций принимающих на интервалах Тo значение «0» или «1», длительность одной позиции составляет Тo=0.05 мкс. Интервал интегрирования фототока, для получения дискетных отсчетов так же составляет 0.05 мкс. Длительность зондирующей последовательности составляет 256*0.05=12.8 мкс.
Радиальная скорость сближения зондируемого объекта и лидара составляет 300 км/ч (83 м/с). Поэтому за время равное (256-1)*30 мкс. зондируемый объект приблизится к лидару на 0.64 м, благодаря этому, время прохождения последнего принимаемого сигнала от отражающего объекта к лидару сократится по сравнению с временем прохождения первого принимаемого сигнала на 0.64 м*2/С=4.25 не, что на порядок меньше, чем Тo (интервал интегрирования фототока для получения дискетных отсчетов). Такой максимальный «уход» на 4.25 не принимаемых в 256 циклах сигналов не вызовет существенных потерь сигнала в процессе накопления в первом накопителе дискретных отчетов сигнала, полученных интегрированием фототока на отрезках Тo в первом накопителе и не внесет каких-либо существенных искажений при определении расстояния до зондируемого объекта.
Пример №3
Для генерации бинарной псевдослучайной последовательности X используется каскадный вычислитель (см. фиг. 2), состоящий из девяти каскадов, в которых установлены задержки на 128, 1, 64, 2, 32, 4, 16, 8, 256 такт, соответственно и между последним и предпоследним каскадом соединения произведены, так что первый выход предпоследнего каскада соединен со вторым входом последнего каскада и второй выход предпоследнего каскада соединен с первых входом последнего каскада.
Подаем на вход каскадного вычислителя единичный отсчет. Полученную на выходе 2 устройства, оказанного на фиг. 2, последовательность из N=512 отсчетов считываем в обратном порядке. Назовем полученную последовательность


Подадим последовательность X снова на вход схемы отраженной на фиг. 2. В результате чего, на выходе 2 устройства фиг. 2, получим на 512-м такте корреляционный отклик амплитудой 256=N/2, при этом амплитуда боковых пиков вычисляемой ВКФ не будет превышать 17. Отношение корреляционного отклика к боковым лепесткам ВКФ составляет ~1/(N/2)1/2.
Данная ВКФ отображена на фиг. 3. По оси ординат отложена амплитуда на выходе каскадного вычислителя (фиг. 2), при подаче на вход его последовательности X, по оси абсцисс нормированное время t/To (или номер синхроимпульса).
Таким образом, при помощи каскадного вычислителя, отображенного на фиг. 2 осуществляется вычисление корреляции между последовательностями
Для генерации последовательностей

Подаем на вход каскадного вычислителя единичный отсчет.
Полученную с выхода 2 устройства (фиг. 4) последовательность из N=512 отсчетов считываем в обратном порядке, назовем полученную последовательность

Подадим эту последовательность на вход устройства, показанного на фиг. 2. На выходе 2 устройства, показанного на фиг 2., получим ВКФ (последовательность) с уровнем лепестков порядка ~2(N/2)1/2, что ниже, чем амплитуда корреляционного отклика равная N/2=256 в случае, когда, последовательность и устройство вычисления (фильтр) согласованы.
Данная дискретная ВКФ отображена на фиг. 5. По оси ординат здесь отложены дискретные отсчеты на выходе каскадного вычислителя фиг. 2, по оси абсцисс - нормированное время t/To (или номер синхроимпульса).
Таким образом, при помощи каскадного вычислителя, отображенного на фиг. 2 осуществляется вычисление корреляции между последовательностями Y и
Как видно из фиг. 5, уровень лепестков ВКФ по отношению к амплитуде корреляционного отклика, полученного при подаче на вход согласованной последовательности (сигнала) находится на уровне ~4/(N/2)1/2.
Таким образом, осуществляется подавление принимаемых сигналов, созданных иными аналогичными устройствами, работающими в непосредственной близости от рассматриваемого приемного устройства, но использующего для модуляции зондирующего бинарного оптического сигнала иную псевдошумовую последовательность.
К недостаткам примера №3 подавления можно отнести то, что для увеличения глубины подавления (отношения амплитуды корреляционного отклика, получаемого на выходе устройства вычисления корреляции 8) при подаче на его вход согласованной последовательности с числом позиций N, к максимальному уровню боковых лепестков ВКФ при подаче на его вход иной случайной или псевдослучайной последовательности с тем же числом позиций и той же амплитудой), необходимо увеличивать N - длину последовательности.
Пример №4. Совместная работа двух лидаров, установленных на двух транспортных средствах
Одновременная работа двух оптических устройств (лидаров), назовем их лидар Л1 и лидар Л2. Для синхронизации этих двух лидаров возможно использовать сингалы точного времени и частоты, полученные от одной из глобальных навигационных систем или общий стабильный генератор синхроимпульсов (в случае размещения лидаров на одном объекте, например, транспортном средстве). Оба лидара для зондирования используют четыре дополнительных последовательности, полученные из модифицированных D-кодов, сгенерированных каскадной схемой с параметрами приведеными в таблице 2. В таблице знак «=» означает, что выход 1 одного каскада соединен со входом 1 следующего каскада, и выход 2 одного каскада соответсвенно соединен с входом 2 последующего каскада, а знак «х» означает что, выход 1 одного каскада соединен со входом 2 последующего каскада и выход 2 соединен со входом 1, соотвественно.

Схемы генерации модифицированных D-кодов, используемых лидаром Л1 и лидаром Л2 приведены на фигурах 6 и 7.
Подав на вход схемы, изображенной на фигуре 6 единичный импульс на первом такте, получим с первого по восьмой такты на выходе 1 и выходе 2 дополнительные кодовые последовательности длины 8. Запишем их в обратном порядке и назовем их D и


Сформируем четыре дополнительных последовательности, которые будут использоваться в качестве зондирующих лидаром Л1. Для этого из последовательности D сформируем последовательность К1 путем замены на «0», и последовательность К2 путем замены «1» на «0» и «-1» на «1». Аналогичным образом из последовательности

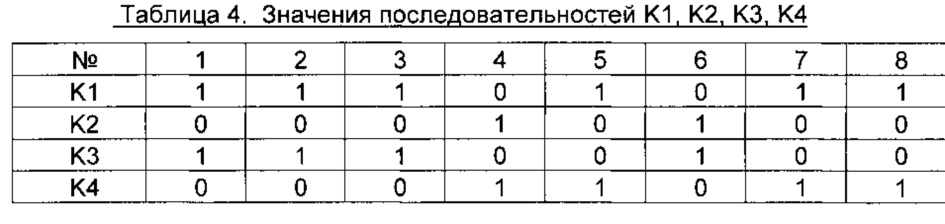
Кодовые последовательности К1, К2, К3, К4 используются для модуляции бинарных оптических сигналов излучаемых лидаром в качестве зондирующих последовательно.
Модуляция состоит в том, что по тактовому сингналу с частотой fмод. На каждом такте, в случае если кодовая позиция принимает значение 1 излучается оптический импульс фиксированной длительности Тм причем Тм≤1/ fmod =То, а если кодовая позиция принимает значение 0, то ничего не происходит.
В рассматриваемом примере Тм=1/fmod=То, где То интервал интегрирования фототока в блоке 6.
Длительность излучаемого бинарного оптического сигнала модулировного кодовой последоваельностью составляет 8Т0, где 8 - длина кодовых последовательстей К1, К2, К3, К4.
Бинарные оптические сигналы, модулированные последовательностями К1, К2, К3, К4, излучаются периодически с периодом Тзонд.
Тзонд=2Rмакс⋅/C, где С - скорость света, RМакс⋅ - верхняя граница диапазона разрешаемых дальностей до зондируемых объектов.
Так что сначала излучается сигнал, модулированный кодом К1, затем бинарные оптические сингалы, модулированные кодами К2, К3 и К4. Далее цикл зондирования при необходимости повторяется снова.
На фигуре 8 представлены синхроимпульсы (график А фиг. 8). Излучаемый бинарный оптический сигнал, модулированный последовательностью К1 (график Б, фиг. 8) и тот же сингал, отраженный от объекта (график В, фиг. 8).
На графике Г показан процесс интегрирования принимаемого оптического сигнала на отрезках Тo=1/fmod с началом интегрирования по синхроимпулсам (график А). На графике Д, фиг. 8 показана дискретная последовательность, получаемая в результате интегрирования.
На первом цикле зондирования дискретные отсчеты, с блока 6 (через блок 7) записываются в ячейки памяти первого блока накопления 12, причем номер каждой ячейки памяти, есть номер дискретного отсчета отсчитываемый в каждом цикле зондирования заново или номер синхроимпульса поступающего на блок 6 (интегрирования на инервалах времени Тo).
На втором цикле зондирования дискретные отсчеты, с блока 6 (через блок 7) вычитаются из содержимого ячеек памяти первого блока накопления, причем номер каждой ячейки памяти, есть номер дискретного отсчета и результат вычитания синхронно подается на блок вычисления взаимной корреляции 8.
В блоке вычисления корреляции 8 вычисляется корреляция между дискретной выборкой длинны 8 соотвествующей выборке D и считанной с первого блока накопления последовательности. В данном примере для вычисления дискретной коорреляции используется каскадный вычислитель, представленный на фиг 6, а требуемая ВКФ считывается с выхода 1 устройства на фиг. 6.
Дискретная последовательность с блока 8 синхрооно записывается в ячейки памяти второго блока накопления, причем номер ячейки накопления соотвествует номеру считываемого дискретного отсчета.
Далее, на а 3-м цикле зондирования, дискретыне отсчеты с блока 6 (через блок 7) записываются в ячейки памяти первого блока накопления и результат вычитания синхронно подается на блок вычисления взаимной корреляции 8.
В блоке вычисления корреляции 8 вычисляется корреляция между дискретной выборкой длинны 8 соотвествующей выборке D и считанной с первого блока накопления последовательности. В данном примере для вычисления дискретной коорреляции используется каскадный вычислитель, представленный на фиг 6, а требуемая ВКФ считывается с выхода 2 устройства на фиг. 6.
Дискретная последовательность с блока 8 прибавляется к значениям записанонным в ячейки памяти второго блока накопления, причем номер ячейки памяти соотвествует номеру считываемого дискретного отсчета. Содержимое ячейки памяти, содержащее, результат сложения подается на пороговый обнаружитель 9 при превышении порога на блок 10 вычисления расстояния до зондируемого объекта подается так же, информация о номерах ячеек памяти, содержимое которых превысило порог.
В таблице 5 приведены амплитуды сигналов на выходах блоков лидара Л1 в зависимости от номера синхроимпульса и номера цикла зондирования, номера ячеек памяти первого и второго накопителей и привязаны к номеру синхроимпульса подаваемому на блок интегрирования 6 в каждом цикле зондирования.
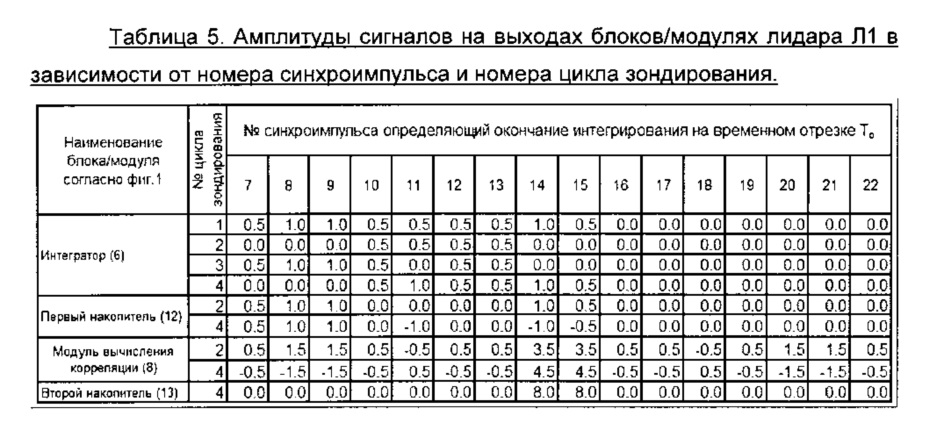
В момент времени, соответствующий 14-му и 15-му синхроимпульсам, на выходе блока накопления пороговым обнаружителем зафиксировано превышение порога (допустим, пороговый уровень обнаружения сигнала пусть равен 1.0). Определим задержку принимаемого сигнала относительно зондирующего. Грубо по номеру синхроимпульса на котором произошло пороговое обнаружение. Номер этого синхроимпульса в данном примере равен 14.
Тгр.=((m-1-N)To), где N - это чисто позиций 0 и 1 в зондирующем сигнале то есть N=8, am- это номер синхроимпульса, на котором произошло пороговое обнаружение, то есть m=14.
Тгр.=5Тo
Определим поправку к задержке, используя информацию об амплитуде второго отсчета с выхода блока накопления, следующего за первым отсчетом превышающем порог.
dt=Q2/(Q1+Q2)To=8/(8+8)Тo=0.5*То, где Q1 это амплитуда первого отсчета на выходе бока накопления превышающего пороговое значение (в таблице 5 это отсчет с номером 14), a Q2 второго следующего за ним.
Задержка сигнала точно:
Тточ=Tгр+dt=5.5*Тo
Rточ=Тточ*С/2
Графическое пояснения к определению задержки Тзад=Rточ*2/C приведено на фиг. 8 (график Е).
Вычисление задержки сигнала точно вычисляет блок 11. Покажем на этом примере функции, которые выполняет блок 17 выборки и обработки зондирующих сигналов. В соответствии с номером цикла зондирования, блок 17 обеспечивает модуляцию бинарного оптического сигнала на первом цикле зондирования последовательность К1, на втором К2, на третьем К3 и на четвертом К4, кроме того блок 17 определяет порядок действий с ячейками памяти первого и второго накопителей, так а первом цикле зондирования значения дискретных отсчетов с блока 7 заносятся в ячейки памяти первого накопителя, а на втором вычитаются из содержимого ячеек памяти при этом результат вычитания передается на блок 8, а результат вычисления с блока 8 поступает на второй накопитель и так далее.
Лидар Л2 работает одновременно с лидаром Л1 с той же тактовой частотой синхроимпульсов, так же совпадают во времени начало и окончание циклов зондирования.
В лидаре Л2 используется другой набор кодовых последовательностей, назовем их L1, L2, L3, L4.
Подав на вход схемы, показанной на фиг. 7 единичный импульс на первом такте, получим с первого по 8-й такты на выходе 1 и выходе 2 дополнительные кодовые последовательности длины 8. Запишем их в обратном порядке и назовем их С и

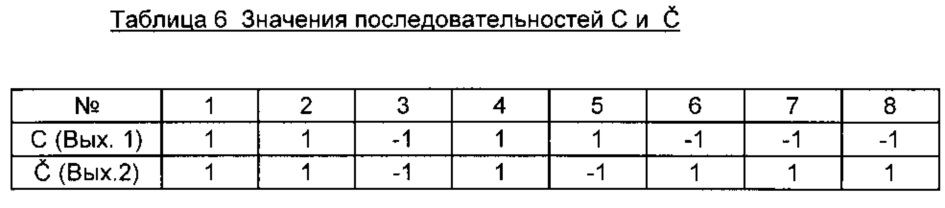
Сформируем четыре дополнительных последовательности, которые будут испльзоваться в качестве зондирующих лидаром Л2. Для этого из последовательнсти С сформируем последовательности L1 путем замены «-1» на «0», также сформируем последовательность L2 путем замены «1» на «0» и «-1» на «1». Аналогичным образом из последовательности


Кодовые последовательности L1, L2, L3, L4 используются для модуляции бинарных оптических сигналов излучаемых лидаром Л2 в качестве зондирующих.
В таблице 8 приведены амлитуды сингалов на выходах блоков лидара Л1 при приеме им сигнала лидара Л2 в зависимости от номера синхроимпульса и номера цилка зондирования.

Как видно из таблицы 8, последовательность на выходе второго накопителя на 4-м цикле зондирования, только нулевые значения. Таким образом осуществляется полное подавление сигнала от лидара Л2, в лидаре Л1.
Аналогично оптический сигнал лидара Л1 будет так же подавляться в приемном тракте лидара Л2. Благодаря этому два лидара могут синхронно работать, одновременно не мешая работе друг друга.
Кроме того, при наличии дополнительных средств обработки лидары Л1 и Л2 могут взаимно принимать зондирующие сигналы друг друга, что может быть использовано, например, для повышения точности определения координат целей, отражающих оптический сигнал.
В ряде случаев необходима одновременная работа не двух, а N лидаров. Покажем, как в этом случае избежать или по крайней мере существенным образом сократить уровень взаимных помех, вызванный работой других одновременно работающих лидаров.
Пример №5. Совместная работа трех лидаров, установленных на трех транспортных средствах
Лидары работают синхронно с использованием одного и того
Тзонд=2Rмакс/С
Лидар Л1 использует частоту синхроимпульсов fmod1=F1
Лидар Л2 использует частоту синхроимпульсов fmod2=F1
Лидар ЛЗ использует частоту синхроимпульсов fmod3=0.1*F1
Лидар Л1 использует кодовую последовательность X из примера 2, назовем ее Е1. Лидар Л2 использует кодовую последовательность Y из примера 2, назовем ее Е2. Лидар Л3 использует кодовоую последовательность К1 из примера 3, назовем ее Е3.
Кроме того, лидары для модуляции зондирующих оптических сингналов также используют и последовательности

Пусть лидары синхронно осуществляют четыре цикла зондирования При этом в каждом цикле зондирования используются следующие сигналы выбор которых определяется с использованием матрицы Адамара размерности М=2n, причем М-1 определяет число одновременно работающих лидаров. В рассматриваемом примере М+1=22=4. Н4 - матрица Адамара размерности 4.

Пусть второй столбец в этой матрице определяет порядок зондирующих сигналов лидара Л1 следующим образом:
позиция 1 в столбце соответствуют кодовой последовательности Е1,
позиция «-1» соответствует кодовой последовательности

Аналогично, для определения порядка зондирующих сигналов лидара Л2 используем столбец 3, а для лидара Л3-столбец 4 соответственно. Правило выбора зондирующей последовательности приведено в таблице 9.


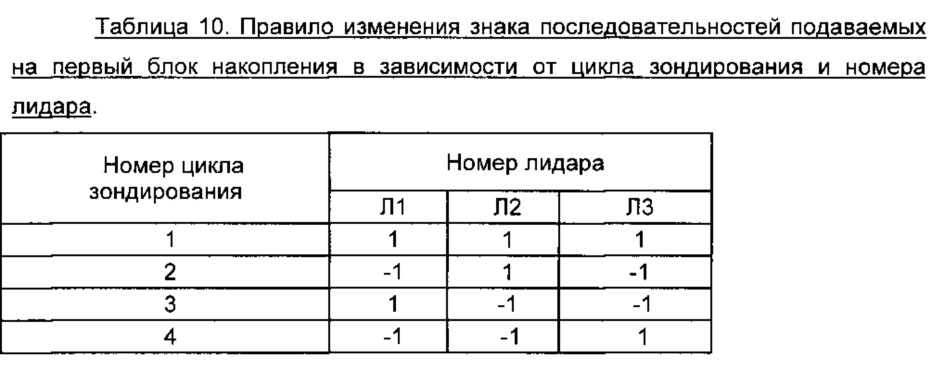
Принимаемые отраженные оптические сигналы в лидаре Л1 синхронно детектируются, путем интегрирования фототока на интервалах Тo и подаются в первый блок накопления 12, причем на каждом цикле зондирования в соотвествии с правилом, приведенным в таблице 10 происходит изменение знака последовательности подаваемой на первый блок накопления сигнала (12) на отрицательный (знак «-1» в таблице 9). Таблица 10 так же постоена из матрицы Адамара путем отбрасывания первого столбца марицы Адамара. На первым цикле зондирования последовательность с блока 6 (через блок 7) записывается в соотвествующие ячейки первого блока накопления, а на последующих циклах происходит прибавление соотвествующих дискретных отсчетов получаемых с блока 6 (через блок 7) с учетом знака определяемого по правилу таблицы 10.
На фигуре 9 на оси абсцисс отложен номер синхроимпульса от начального момента зондирования в лидаре Л1. На графиках А-Г фиг. 9 отображены последовательсти Е1,


Блок изменения знака последовательности в соответствии с правилом, приведенным в таблице 10 на схеме фиг. 1 не указан, т.к. фактически изменение знака эквивалентно вычитанию дискретных отсчетов из содержимого соответствующих ячеек памяти первого блока накопления дискретного сигнала. В настоящий и последующий пример он введен для упрощения графических пояснений.
На графике Д фиг. 9 отображена последовательность (дискретный сигнал), считываемая с ячеек памяти первого блока накопления 12 и подаваемая на блок 8 вычисления дискретной корреляции, в частном случае он может быть реализован в виде каскадного вычислителя.
Если блок 8 реализован в виде каскадного вычислителя, как в примере 2, то считывание производилось с выхода 2. Как видно, на выходе каскадного вычислителя получаем сигнал с корреляционным пиком на 2900 такте от начала зондирования (подсчет тактов ведется для каждого цикла зондирования, как в примере №4).
На фигуре 10 на графиках А-Г (фиг. 10) отображены последовательсти Е2, -Е2,


лидара Л1, на первом (график А, фиг. 10), втором (график Б, фиг. 10), третьем график В, фиг. 10), и четвертом график Г, фиг. 10), циклах зондирования. На оси абсцисс указаны номера синхроимпульсов на каждом такте зондирования лидара Л1. На графике Д, фиг. 10 отображена последовательность (дискретный сигнал), считываемый с первого блока накопления 12 лидара Л1 и подаваемая на блок вычисления корреляции 8 лидара Л1.
Как видно, сигнал, считываемый с первого блока накопления 12 лидара Л1 нулевой. График Д, фиг. 10. Соответственно лидар Л2 не будет создавать помех при дальнейшей обработке накопленного сигнала в блоке вычисления корреляции 8 лидара Л1.
На фигуре 11 на графиках А - Г, отображены последовательности Е3,


Как видно, сигнал, считываемый с первого блока накопления 12 лидара Л1 - нулевой. См. график Д, фиг. 11. Соответственно лидар Л3, работающий на пониженной тактовой частоте, не будет создавать помех при дальнейшей обработке накопленного сигнала в блоке вычисления корреляции 8 лидара Л1.
Пример №6. Пример использования второго блока накопления 13
Первые четыре цикла зондирования лидаров Л1, Л2, Л3 ничем не отличаются от приведеных в примере №5. На последующих четырех циклах используются для зондирования дополнительные коды к кодам Е и

Назовем их коды

Так код




Аналогичным образом из последовательности с дополнительного выхода каскадного вычислителя формируются последовательности и




Последовательность с каскадного вычислителя (основной выход), сформированная после первых четырех циклов зондирования записывается в ячейки памяти второго блока накопления 13.
Последовательность с каскадного вычислителя (дополнительный выход) сформированная после вторых четырех циклов зондирования (циклы 5, 6, 7, 8) прибавляется к содержимому ячеек памяти второго блока накопления 13.
При этом, в получаемой при сложении последовательности происходит взаимное подавление боковых лепестков двух исходных ВКФ, что отображено на фиг 12.
Пример №7
Производительность современных процессоров с архитектурой параллельных вычислений (Например, компании Nvidia) измеряется в терафлопах, что эквивалентно 1 триллиону операций над вещественными числами разрядности 64. И может достигать 4-7 терафлоп
В примере №2 используется приемная матрица, содержащая 300×200=60000 элементов, преобразующих оптический сигнал в фототок и интегрирующих этот фототок на отрезках Тo. Для зондирования отражающих объектов используются оптические сигналы, содержащие 256 кодовых позиций.
То есть, для обработки одного принимаемого отсчета, подаваемого на блок вычисления ВКФ с первого блока накопления, при использовании для вычисления ВКФ каскадного вычислителя необходимо 16 операций сложения.
Накопление дискетного сигнала, перед подачей на каскадный вычислитель осуществляется за 256 циклов. Таким образом, чтобы выполнить обработку (каскадным вычислителем) накопленного за 256 циклов сигнала за последующие 256 циклов зондирования необходим процессор производительностью, всего 0.1 терафлоп.
Пример №8
Пусть несколько лидаров зондируют одни и те же объекты на близком расстоянии, например расположенные на расстоянии не более десятков метров от лидаров. В этом случае можно использовать иной режим синхронизации работы лидаров, так называемый режим разделения времени. В данном режиме у каждого лидара есть время начало работы. Допустим лидар Л1 осуществляет зондирование в течении 2 мкс, каждые 10 мкс. Лидар Л2 осуществляет зондирование в течении 2 мкс, каждые 10 мкс, но с задержкой времени начала зондирования на 2 мкс по отношению к лидару Л1 и т.д. Такой режим совместной работы целесообразно использовать для обзора пространства непосредственно примыкающего к лидару. В этом режиме использование первого блока накопления необязательно.
Промышленная применимость
Предлагаемое оптическое устройство для определения расстояний до объекта может быть осуществлены специалистом на практике и при осуществлении обеспечивают реализацию заявленного назначения, что позволяет сделать вывод о соответствии критерию «промышленная применимость» для изобретения.
В соответствии с предложенным изобретением были проведены расчеты работы оптического устройства для определения расстояний до объекта.
Расчеты работы устройства показали, что оно обеспечивает возможность одновременной работы нескольких оптических устройств. Таким образом, в данном изобретении достигнута поставленная задача - обеспечение максимального подавления взаимного влияния зондирующих сигналов оптических устройств на определение ими дальностей до зондируемых объектов в группе одновременно работающих по одним и тем же зондируемым объектам в одном и том же частотном (оптическом) диапазоне оптических устройств.
Рекомендуется применять данное изобретение для:
- систем технического зрения, в том числе и для летательных аппаратов, робототехнических систем,
Несмотря на то что изобретение было подробно описана на примерах вариантов, которые представляются предпочтительными, необходимо помнить, что эти примеры осуществления изобретения приведены только в целях иллюстрации изобретения. Данное описание не должно рассматриваться как ограничивающее объем притязаний изобретения, поскольку в схему описанного изобретения специалистами в области обработки сигналов и проектирования интегральных микросхем, и др. могут быть внесены изменения, направленные на то, чтобы адаптировать изобретение конкретным устройствам или ситуациям, и не выходящим за рамки прилагаемой формулы изобретения. Специалисту в данной области техники понятно, что в пределах сферы действия изобретения, которая определяется пунктами формулы изобретения, возможны различные варианты и модификации, включая эквивалентные решения.
Реферат
Оптическое устройство для определения расстояний до объекта включает в себя источник излучения, генератор создания зондирующей последовательности, генератор тактового сигнала, светочувствительный элемент детектирования отраженного оптического сигнала от объекта, блок интегрирования, модуль вычисления корреляции излученного и отраженного сигналов модуль порогового обнаружения сигнала, модуль вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала. Дополнительно устройство включает в себя блок накопления, эталонный источник сигналов точного времени и частоты, блок формирования синхроимпульса на начало цикла зондирования в один и тот же момент времени на разных оптических устройствах, блок подсчета циклов зондирования, блок выборки и обработки зондирующих сигналов. Технический результат заключается в обеспечении подавления взаимного влияния зондирующих сигналов оптических устройств на определение ими дальностей до зондируемых объектов в группе одновременно работающих по одним и тем же зондируемым объектам в одном и том же частотном (оптическом) диапазоне оптических устройств. 8 з.п. ф-лы, 14 ил., 12 табл.
Комментарии