Способ обнаружения подводных объектов (варианты) и устройство для его осуществления - RU2645016C1
Код документа: RU2645016C1
Чертежи

Описание
Изобретение относится к области гидроакустики и может использоваться в гидролокационных устройствах обнаружения подводных объектов, предназначенных для использования в районах с высоким уровнем реверберационных помех в условиях мелководья, сложного рельефа дна и волнения водной поверхности.
Из анализа уровня техники известно «Устройство обнаружения подводных объектов по оценке меры случайности эхо-сигнала гидролокатора» (Патент на полезную модель №83344, опубликовано 27.05.2009, МКИ G01S 15/04), содержащее гидроакустическую антенну для излучения зондирующего и приема отраженного эхо-сигнала, блоки аналого-цифровых преобразователей, усилителей и полосовых фильтров, генератор зондирующего сигнала, усилитель мощности. Отличительной особенностью данного устройства является наличие измерителя фрактальной размерности принимаемого сигнала, выполненного для осуществления оценки меры случайности амплитуд эхо-сигнала на выходе согласованного фильтра, и выражать эту меру в виде числа (фрактальной размерности), служащего для сравнения полученного числа с некоторым порогом для принятия решения о наличии полезного сигнала от обнаруживаемого объекта. Существенным отличием данного технического решения является использование неэнергетического параметра сигнала для обнаружения полезного сигнала.
Недостатками данного устройства являются: малая помехозащищенность, обусловленная невозможностью подстройки под конкретный вид распределения помех и, невозможность оценки параметров сигнала цели, например пеленга цели.
Известно изобретение «Способ селекции движущихся целей» (Патент №2058033 РФ, опубликовано 10.04.1996, МКИ G01S 15/00), основанное на облучении исследуемого объема пространства сигналами излучения, приеме отраженных сигналов, определении разности фаз между излученными и отраженными сигналами, при этом излучают ГЧМ-сигнал, по разности фаз вычисляют радиальную скорость движущихся целей и при наличии заданного изменения разности радиальных скоростей по времени и/или по элементам исследуемого объема принимают решение о селекции движущихся целей, кроме того, по максимальному изменению разности радиальных скоростей по времени и/или элементам исследуемого объема уточняют местоположение селектируемой цели. Устройство, реализующее предлагаемый способ, содержит генератор ГЧМ-сигнала, излучатель, приемник, аналого-цифровой преобразователь (АЦП), первую рециркуляционную линию задержки (РЛЗ-1), первый умножитель, третью рециркуляционную линию задержки (РЛЗ-3), вторую рециркуляционную линию задержки (РЛЗ-2), второй умножитель, фазовращатель (на π/2), четвертую рециркуляционную линию задержки (РЛЗ-4); первый усреднитель, второй усреднитель, вычислитель arctg X/Y, блок деления, блок вычисления ехр (Δϕ/Ω), блок разности 1α, третий умножитель и индикатор.
Недостатками данного изобретения являются низкая помехоустойчивость и точность обнаружения в условиях воздействия нестационарной реверберационной помехи.
Известно изобретение «Устройство обнаружения объектов в водной среде» (Патент №2585401 РФ, опубликовано 27.05.2016, МКИ G01S 15/04), содержащее блок приемоизлучателей (гидроакустическую антенну), блок усилителей и полосовых фильтров, блок аналого-цифровых преобразователей (АЦП), блок согласованных фильтров, генератор сигнала посылки, усилитель мощности, измерительное устройство, вычислитель и детектор. Функцией блока согласованных фильтров является осуществление оптимального приема отраженного эхо-сигнала на фоне помех. Функцией измерительного устройства является измерение параметра формы распределения и характеристической частоты эхо-сигнала на выходе согласованного фильтра. Функцией вычислителя является вычисление отношения параметра формы и характеристической частоты эхо-сигнала. Функцией детектора является сравнение полученного числа на выходе вычислителя с пороговым значением и принятие решения: обнаружен искомый объект локации или нет. Принципиальным отличительным техническим решением в данном устройстве является использование в нем неэнергетического приемника, а именно блока, измеряющего параметр формы распределения эхо-сигнала и его характеристическую частоту, а также вычислителя отношения результатов этих измерений. Последнее путем сравнения с пороговым значением служит для обнаружения полезного сигнала. Существует эмпирический закон, представленный в виде таблицы, позволяющий выбрать значение порога для различного типа вероятностных распределений сигнала.
Существенными недостатками данного устройства являются: малая помехозащищенность, обусловленная невозможностью подстройки под конкретный вид распределения помех и невозможностью обработки многомерных сигналов, и, как следствие, невозможность оценки параметров сигнала цели, например пеленга цели.
Известно изобретение «Анализатор характеристической функции сигнала» (Патент №2261451 РФ, опубликовано 27.09.2005, МКИ G01R 25/00), предназначенный для измерения статистических характеристик случайной фазы сигнала. Анализатор имеет два канала преобразования, каждый из которых содержит последовательно включенные генератор линейно частотно-модулированного сигнала, амплитудный модулятор, дисперсионную линию задержки, демодулятор с полосовым фильтром, перемножитель, интегратор и регистратор. Выход демодулятора первого канала подключен ко второму входу перемножителя второго канала, а выход демодулятора второго канала - через фазовращатель ко второму входу перемножителя первого канала. Входы анализатора подключены через делители ко входам амплитудных модуляторов. Другие входы делителей через пороговые устройства и измерители мощности модулированного сигнала соединены с выходами амплитудных модуляторов. Ко второму входу анализатора подключен измеритель частоты входного сигнала. Выход измерителя частоты через дешифратор адреса соединен с постоянным запоминающим устройством (ПЗУ). Выход ПЗУ соединен с входом делителя порогового напряжения. Выход делителя порогового напряжения соединен со вторыми входами пороговых устройств каждого канала. Предлагаемый анализатор позволяет управлять уровнем сигналов на выходе амплитудного модулятора в зависимости от частоты входного сигнала анализатора, не допуская возникновения перемодуляции.
Недостатком данного изобретения является необходимость подстройки параметров устройства при изменении частоты и уровня сигнала, для оценки индекса модуляции М измерять энергию сигнала, что в целом увеличивает объем вычислений.
Наиболее близким по технической сущности к предлагаемому изобретению является изобретение «Способ обнаружения подводных объектов и устройство для его осуществления» (патент РФ №2271551, опубликовано 10.03.2006, МКИ G01S 3/80), согласно которому подводное контролируемое пространство облучают гидроакустическим сигналом, принимают отраженные от объекта сигналы на раздельные приемные гидроакустические антенны с параллельно ориентированными осями их диаграмм направленности, осуществляющие обзор контролируемого подводного пространства в горизонтальной и в вертикальной плоскостях, определяют в каждый момент времени в течение цикла излучение-прием разности фаз между парами сигналов, принятых соответствующими парами приемных антенн с разнесенными в горизонтальной и в вертикальной плоскостях фазовыми центрами в плоскости фронта отраженного сигнала, определяют для каждого момента приема текущие гистограммы плотности вероятности распределения измеренных разностей фаз для обеих плоскостей, определяют максимумы гистограмм этих распределений, по которым путем их почленного перемножения определяют текущие реализации значений максимума двумерной плотности разностей фаз, и по этим реализациям, усредненным за несколько циклов излучение-прием, определяют реализацию текущих порогов обнаружения, и по превышению максимума гистограммы плотности распределения угла прихода принимаемого сигнала над порогом судят об обнаружении подводного объекта. В данном способе обнаружения подводных объектов ограничение воздействия реверберации достигается за счет организации пространственной обработки сигнала, состоящей в измерении разностей фаз полезного сигнала, принимаемого пространственно разнесенными антеннами с последующей статистической обработкой - построении оценки совместной плотности вероятности распределения разности фаз, основанной на измерении гистограмм разностей фаз для разнесенных по вертикали и горизонтали антенн.
Данному способу присущи два существенных недостатка. Во-первых, измерение совместной плотности вероятности разностей фаз для вертикальной и горизонтальной пар приемных антенн путем перемножения одномерных гистограмм приводит к низкой помехоустойчивости, и, во-вторых, реализации данного способа свойственна существенная ресурсоемкость (трудоемкость), связанная с тем, что для обеспечения точности оценки углового положения цели количество элементарных ячеек для формирования гистограмм должно составлять по числу не менее чем частное от деления размера контролируемого углового сектора на требуемую точность измерения пеленга цели по углу. При малом отношении сигнал/шум и большом количестве элементарных ячеек гистограмм это может приводить к понижению уровня максимума гистограммы, и, соответственно, как следствие, к уменьшению вероятности правильного обнаружения ввиду размытия максимума гистограммы.
Технической задачей изобретения является повышение точности, помехоустойчивости и вероятности правильного обнаружения, уменьшение ресурсоемкости вычислений.
Технический результат заключается в устранении ошибок измерения, вызванных статистической зависимостью оценок разности фаз для вертикального и горизонтального каналов измерения, повышении точности и уменьшении ресурсоемкости за счет использования измерения выборочной двумерной характеристической функции разности фаз сигналов в вертикальном и горизонтальном измерительных каналах.
Данная техническая задача по варианту 1 решается созданием способа обнаружения подводных объектов, заключающегося в том, что подводное контролируемое пространство облучают гидроакустическим сигналом, принимают отраженные от объекта сигналы на приемные гидроакустические антенны, пространственно разнесенные в вертикальной и горизонтальной плоскостях, измеряют в каждый момент времени в течение цикла излучение-прием разности фаз между парами сигналов, принятых соответствующими парами приемных антенн с разнесенными в горизонтальной и в вертикальной плоскостях фазовыми центрами в плоскости фронта отраженного сигнала, производят измерение и накопление за некоторое наперед заданное количество циклов выборочной характеристической функции совместного распределения для некоторого наперед заданного набора значений аргументов, выполняют сравнение полученных оценок характеристической функции за текущий цикл и заданное количество предшествовавших циклов, а по результату сравнения выносят решение о наличии или отсутствии полезного сигнала, значении пеленга и угла места его источника.
Кроме того, сравнение характеристических функций производят путем перемножения характеристической функции совместного распределения в текущем цикле излучения на комплексно сопряженную характеристическую функцию совместного распределения, осредненную за предыдущие циклы, нормированную на ее модуль.
Кроме того, для принятия решения о наличии полезного сигнала производят усреднение квадратов модулей результата сравнения характеристических функций и сравнения полученного значения с заранее определенным порогом.
Кроме того, для определения углового положения используют значение фазы компонент результата сравнения характеристических функций.
Данная техническая задача по варианту 2 решается созданием способа обнаружения подводных объектов, заключающегося в том, что подводное контролируемое пространство облучают гидроакустическим сигналом, принимают отраженные от объекта сигналы на приемные гидроакустические антенны, пространственно разнесенные в вертикальной и горизонтальной плоскостях, измеряют в каждый момент времени в течение цикла излучение-прием разности фаз между парами сигналов, принятых соответствующими парами приемных антенн с разнесенными в горизонтальной и в вертикальной плоскостях фазовыми центрами в плоскости фронта отраженного сигнала, производят измерение и накопление за некоторое наперед заданное количество циклов выборочной характеристической функции совместного распределения для некоторого наперед заданного набора значений аргументов, выполняют сравнение полученных оценок характеристической функции за текущий цикл и заданное количество предшествовавших циклов, при этом сравнение производят путем перемножения выборочной характеристической функции совместного распределения в текущем цикле излучения на комплексно сопряженную выборочную характеристическую функцию совместного распределения, осредненную за предыдущие циклы, нормированную на ее модуль, причем для принятия решения о наличии полезного сигнала производят усреднение квадратов модулей результата сравнения выборочных характеристических функций совместного распределения и сравнения полученного значения с заранее определенным порогом, а по результату сравнения выносят решение о наличии или отсутствии полезного сигнала, пеленга и угла места его источника
Кроме того, для определения углового положения используют значение фазы компонент результата сравнения выборочных характеристических функций.
Технический результат достигается созданием устройства для осуществления способа обнаружения подводных объектов, выполненного в виде гидроакустической приемоизлучающей системы, включающей направленную излучающую антенну и, по меньшей мере, три идентичные и соосно направленные приемные антенны с разнесенными по вертикали и по горизонтали фазовыми центрами, усилители сигналов излучения и приема, фазовые детекторы, индикатор, блок цифровой обработки сигналов, в котором блок цифровой обработки сигналов выполнен в виде анализатора характеристической функции сигнала, выполненного с возможностью измерения выборочной характеристической функции совместного распределения оценок разности фаз сигналов в вертикальном и горизонтальном измерительных каналах, при этом направленная излучающая антенна соединена с усилителем сигнала излучения, а идентичные и соосно направленные приемные антенны с разнесенными по вертикали и по горизонтали фазовыми центрами соединены с усилителями сигналов приема, соединенными с фазовыми детекторами, которые соединены с анализатором характеристической функции сигнала, соединенным с индикатором.
Технический результат достигается созданием анализатора характеристической функции сигнала, включающего вычислитель выборочной характеристической функции, многоканальный интегратор, комплексный перемножитель, сумматор, пороговое устройство сравнения и вычислитель фаз, при этом выход вычислителя выборочной характеристической функции соединен с входами многоканального интегратора и комплексного перемножителя, а выход многоканального интегратора соединен с другим входом комплексного перемножителя, выход которого соединен с входами сумматора и вычислителя фаз, выход сумматора соединен с входом порогового устройства сравнения, при этом выходы вычислителя фаз и порогового устройства сравнения соединены с выходом устройства.
Технический результат достигается созданием вычислителя выборочной характеристической функции, включающего первый и второй масштабирующие усилители, входы которых являются входами вычислителя, а выходы которых подключены к входам первого и второго перемножителей, вторые входы которых соединены с выходами первого и второго запоминающих устройств, а выходы - с входами сумматора, при этом выходы счетчика адреса соединены с входами первого и второго запоминающих устройств, при этом выход сумматора соединен с адресными входами третьего и четвертого постоянных запоминающих устройств, выходы которых соединены с входами второго и третьего сумматоров, выходы которых соединены с входами пятого и шестого запоминающих устройств соответственно, вторые входы которых соединены со вторым адресным счетчиком, а выходы пятого и шестого запоминающих устройств соединены между собой и со вторыми входами сумматоров соответственно, и образуют выход вычислителя.
Заявленная группа изобретений поясняется следующими чертежами.
На фиг. 1 приведены рабочие характеристики обнаружения полезного сигнала способа-прототипа, полученные методом математического моделирования для отношений сигнал/шум -10, -6, -3 и 0 дБ для тонального сигнала на фоне некоррелированного нормального шума.
На фиг. 2 приведены рабочие характеристики обнаружения заявляемого изобретения, полученные методом математического моделирования для сравнения в идентичных условиях, показанных на фиг. 1.
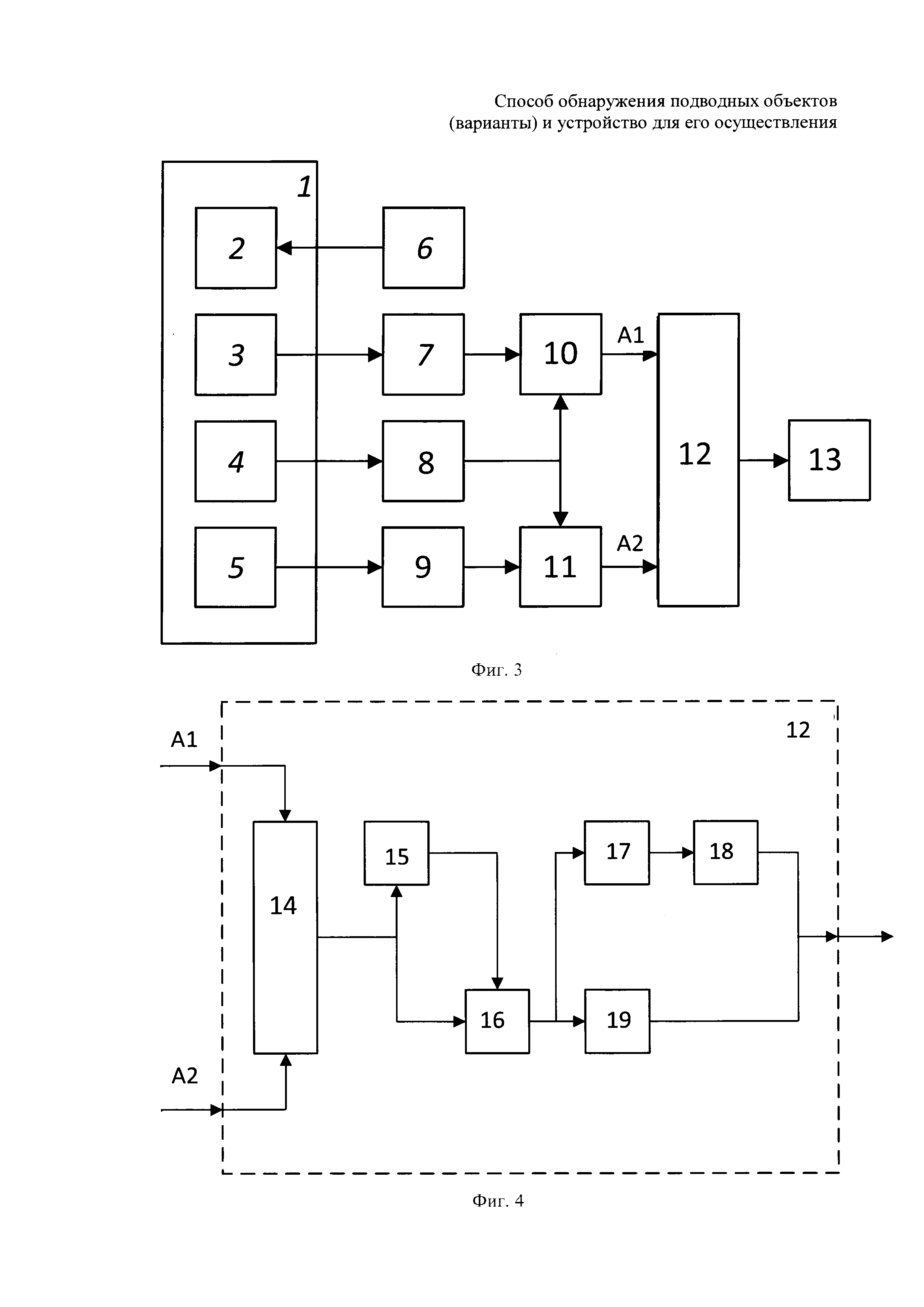
На фиг. 3 приведена блок-схема устройства.
На фиг. 4 приведена блок-схема блока цифровой обработки сигналов (анализатора характеристической функции совместного распределения сигнала).
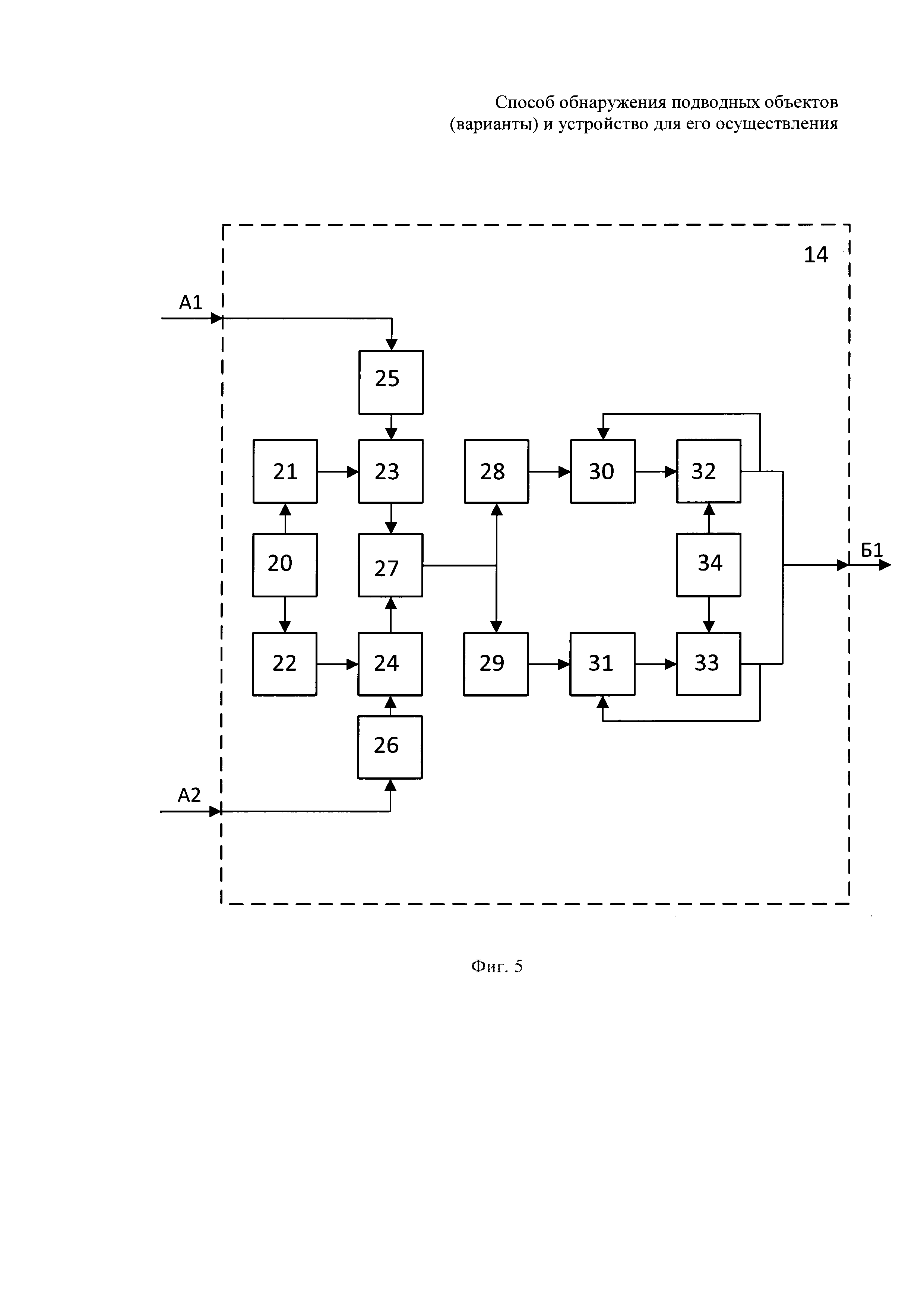
На фиг. 5 приведена функциональная схема вычислителя выборочной характеристической функции.
Для устранения указанных существенных недостатков в дополнение к существенным действиям способа-прототипа - облучению контролируемого пространства гидроакустическим сигналом, приему отраженных от подводного объекта сигналов с помощью разнесенных по вертикали и горизонтали приемных антенн, измерению разностей фаз сигналов между разнесенными антеннами, производят дополнительно измерение выборочной характеристической функции значений измеренных разностей фаз для некоторого наперед заданного набора значений аргументов характеристической функции совместного распределения в текущем цикле излучения, накопление (усреднение) значений выборочной характеристической функции совместного распределения за некоторое наперед заданное значение циклов излучения, сравнение значений характеристической функции совместного распределения в текущем цикле излучения со значениями характеристической функции совместного распределения, усредненной за некоторое число предыдущих циклов. Сравнение может быть выполнено, например, путем перемножения значений выборочной характеристической функции совместного распределения текущего цикла излучения на соответствующие комплексно сопряженные значения характеристической функции совместного распределения, усредненной за некоторое количество циклов. В полученном результате сравнения выделяется среднее значение амплитуды, величина которого при сравнении с пороговым значением служит для обнаружения полезного сигнала, а по величине фазового множителя судят о направлениях на его источник.
Сущность объекта изобретения-устройства, предназначенного для реализации вышеописанного способа, выражается в следующей совокупности существенных признаков, достаточной для достижения указанного выше обеспечиваемого изобретением технического результата.
Устройство для осуществления вышеописанного способа (фиг. 3) содержит гидроакустическую приемоизлучающую систему 1, установленную, например, на платформе под водой, включающую направленную излучающую антенну 2 и, по меньшей мере, три идентичных и соосно направленных приемных антенн 3 с разнесенными по вертикали 4 и по горизонтали 5 фазовыми центрами, усилители сигналов излучения 6 и усилители сигналов приема первого 7, второго 8, третьего 9, фазовые детекторы первый 10, второй 11, блок цифровой обработки сигналов 12 и индикатор 13, при этом направленная излучающая антенна 2 соединена с усилителем сигнала излучения 6, а идентичные и соосно направленные приемные антенны 3 с разнесенными по вертикали 4 и по горизонтали 5 фазовыми центрами соединены с соответствующими усилителями сигналов приема 7, 8, 9, причем первый усилитель сигнала приема 7 соединен с входом первого фазового детектора 10, третий усилитель сигнала приема 9 соединен с входом второго фазового детектора 11, а выход усилителя сигнала приема 8 соединен со вторыми входами фазовых детекторов 10, 11, которые соединены с соответствующими входами А1 и А2 анализатора характеристической функции сигнала 12, выход которого соединен с индикатором 13. причем блок цифровой обработки сигналов выполнен (фиг. 4) в виде анализатора характеристической функции, включающего вычислитель выборочной характеристической функции 14, многоканальный интегратор 15, многоканальный комплексный перемножитель 16, сумматор 17, пороговое устройство сравнения 18 и вычислитель фаз 19, при этом выход вычислителя характеристической функции 14 соединен с входами многоканального интегратора 15 и комплексного перемножителя 16, а выход многоканального интегратора 15 соединен с другим входом комплексного перемножителя 16, выход которого соединен с входами сумматора 17 и вычислителя фаз 19, выход сумматора 17 соединен с входом порогового устройства сравнения 18, при этом выходы вычислителя фаз 19 и порогового устройства сравнения 18 соединены с выходом устройства.
Функциональная схема вычислителя выборочной характеристической функции представлена на фиг. 5. Вычислитель выборочной характеристической функции содержит первые 20 и вторые 34 счетчики адреса, обеспечивающие выбор кодов значений аргументов выборочной характеристической функции совместного распределения для горизонтальной и вертикальной составляющих из соответствующих первых 21 и вторых 22, пятых 32 и шестых 33 постоянных запоминающих устройств. Коды значений аргументов характеристической функции поступают на первые 23 и вторые 24 перемножители, на вторые входы которых поступают значения разности фаз с входов А1 (горизонтальная пара каналов) и А2 (вертикальная пара каналов) через первые 25 и вторые 26 масштабирующие усилители. Результаты перемножения складываются с помощью сумматора 27 по модулю 2к и поступают на адресные входы третьих 28 и четвертых 29 постоянных запоминающих устройств, содержащих коды косинуса и синуса соответственно, выходы которых подключены к входам первого 30 и второго 31 сумматоров, на вторые входы которых поступают значения с выходов пятых 32 и шестых 33 запоминающих устройств, управляемых по адресным входам с помощью адресного счетчика 34, работающего синхронно с адресным счетчиком 20. Сумматоры 30, 31 и запоминающие устройства 32 и 33 осуществляют накопление/интегрирование сигналов с выходов постоянных запоминающих устройств 30 и 31. Выходы блоков 32 и 33 образуют выход вычислителя 14 - Б1.
Устройство работает следующим образом.
В контролируемую акваторию с помощью направленной излучающей антенны 2, входящей в состав гидроакустической приемно-излучающей системы 1, излучается узкополосный сигнал S0(t) длительностью Т, сформированный усилителем сигналов излучения 6. Здесь t означает время. Отраженный от цели сигнал принимается антеннами 3, 4 и 5 с пространственно разнесенными фазовыми центрами, соответственно, по вертикали (для антенны 3 относительно антенны 4) и по горизонтали (для антенны 5 относительно антенны 4). Выходные сигналы приемных антенн после усиления усилителями 7, 8 и 9 поступают на входы двух фазовых детекторов 10 и 11 для измерения мгновенной разности фаз между сигналами. Выходными сигналами фазовых детекторов 10 и 11 являются случайные процессы, представляющие значения разности фаз ϕν(t) между разнесенными по вертикали антеннами (выход А1 фазового детектора 10) и разности фаз ϕh(t) между антеннами, разнесенными по горизонтали (выход А2 фазового детектора 11).
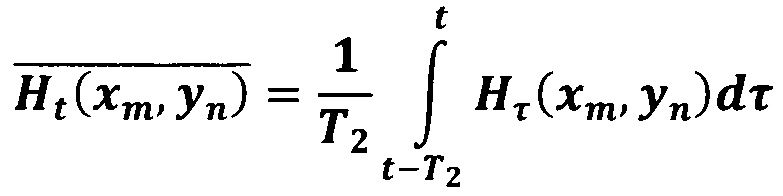
Значения процессов поступают на входы вычислителя выборочной характеристической функции 14, производящей оценки значений характеристической функции Н(x,y) для некоторого наперед заданного набора аргументов [х1 х2 х3…xm] и [y1 y2 y3…yn]. Таким образом, выходным сигналом блока 14 в каждый момент времени является набор, состоящий из mn комплексных значений, полученных осреднением на время, равное длительности излучаемого сигнала Т:

Полученные значения поступают на вход многоканального интегратора 15, где происходит дополнительное интегрирование за время Т2, существенно, не менее чем в 10-15 раз превышающее длительность излучаемого сигнала. Результатом работы блока 15 является набор

Полученные значения Ht(xm,yn) и

Полученные значения суммируются по модулю в сумматоре 17

Значение S0 подается на вход порогового устройства сравнения по превышению заранее заданного порогового значения для принятия решения о наличии или отсутствии сигнала цели.
На вход блока 19 поступают значения S(x1,y2) и S(x2,y1) для определения угловых координат цели по углу места и азимуту относительно ориентации осей диаграмм направленности приемных антенн 3, 4 и 5.
Полученные значения угловых координат цели и сигнал обнаружения с выхода блока 18 подаются для отображения на индикатор 13.
Описанная последовательность операций производится циклически по мере течения времени.
Как следует из представленных результатов характеристики обнаружения полезного сигнала способа-прототипа на фиг. 1, практически полезные вероятности пропуска цели (0.1) при практически приемлемом уровне ложной тревоги (5⋅10-6) достигаются при отношениях сигнал/шум более 0 дБ. При меньших уровнях полезного сигнала практически приемлемые на практике рабочие характеристики не достигаются.
В заявляемом изобретении практически приемлемые рабочие характеристики обнаружения полезного сигнала (фиг.2) достигаются при меньших уровнях сигнала, а именно при отношении сигнал/шум -10 дБ и вероятности пропуска цели 0.1 достигается вероятность ложной тревоги 5⋅10-5. А при отношении сигнал/шум -6 дБ и вероятности пропуска цели 0.01 достигается вероятность ложной тревоги 10-8. Таким образом, преимущество в помехоустойчивости предлагаемого способа по сравнению со способом-прототипом составляет 6 дБ и более.
Реферат
Изобретение относится к области гидроакустики и может использоваться в гидролокационных устройствах обнаружения подводных объектов, предназначенных для использования в районах с высоким уровнем реверберационных помех в условиях мелководья, сложного рельефа дна и волнения водной поверхности. Технический результат заключается в устранении ошибок измерения, вызванных статистической зависимостью оценок разности фаз для вертикального и горизонтального каналов измерения, повышении точности и уменьшении ресурсоемкости за счет использования измерения выборочной характеристической функции совместного распределения оценок разности фаз сигналов в вертикальном и горизонтальном измерительных каналах. Технический результат достигается созданием способа обнаружения подводных объектов, заключающийся в том, что подводное контролируемое пространство облучают гидроакустическим сигналом, принимают отраженные от объекта сигналы на приемные гидроакустические антенны, пространственно разнесенные в вертикальной и горизонтальной плоскостях, измеряют в каждый момент времени в течение цикла излучение-прием разности фаз между парами сигналов, принятых соответствующими парами приемных антенн с разнесенными в горизонтальной и в вертикальной плоскостях фазовыми центрами в плоскости фронта отраженного сигнала, в котором производят измерение и накопление за некоторое наперед заданное количество циклов выборочной характеристической функции для некоторого наперед заданного набора значений аргументов, выполняют сравнение полученных оценок характеристической функции за текущий цикл и за заданное количество предшествовавших циклов, а по результату сравнения выносят решение о наличии или отсутствии полезного сигнала, значении пеленга и угла места его источника. Кроме того, сравнение выборочных характеристических функций производят путем перемножения характеристической функции в текущем цикле излучения на комплексно сопряженную характеристическую функцию, осредненную за предыдущие циклы, нормированную на ее модуль. Кроме того, для принятия решения о наличии полезного сигнала производят усреднение квадратов модулей результата сравнения характеристических функций и сравнения полученного значения с заранее определенным порогом. Кроме того, для определения углового положения используют значение фазы компонент результата сравнения характеристических функций. Даны варианты способа и группа устройств для осуществления способа. 5 н. и 7 з.п. ф-лы, 5 ил.
Комментарии