Система и способы определения местоположения воздушной турбулентности - RU2470331C2
Код документа: RU2470331C2
Чертежи





Описание
Область техники
Настоящее изобретение относится в целом к мерам по обеспечению безопасности самолета и, более конкретно, к системам для определения местоположения турбулентности.
Уровень техники
Турбулентность при ясном небе (ТЯН) возникает на типичных крейсерских высотах полета реактивных самолетов вследствие ряда различных факторов, в том числе: местоположения реактивной струи, местоположения тропопаузы, местоположения ограниченных в пространстве тяжелых погодных условий и местоположения гористой местности. Однако все явления турбулентности при ясном небе имеют одно общее свойство: эти явления возникают при ясном небе, и в настоящее время существует немного способов избежать встречи летательных аппаратов с этими явлениями, кроме как совершить маневр или изменить высоту полета после вхождения в зону турбулентности.
Турбулентность (особенно ТЯН) является источником серьезного беспокойства при выполнении воздушных перелетов. Некоторые авиакомпании прибегают к крайним мерам, чтобы избежать областей, в которых прогнозируется или была ранее обнаружена турбулентность, иногда пролетая множество лишних миль, чтобы избежать встречи с турбулентностью. На многих территориях страны число доступных для авиакомпаний вариантов изменения маршрута полета ограничено пропускной способностью воздушного пространства или ограничениями, накладываемыми системой управления воздушным движением. Предпринимаются усилия для улучшения выявления турбулентности, однако эти усилия помогают только после того, как один или более рейсов попали в возмущенную атмосферу, и они не позволяют постоянно контролировать воздушное пространство. В настоящее время не существует доступного надежного способа, с помощью которого самолет мог бы своевременно обнаружить ТЯН, чтобы успеть предпринять действия по уклонению от встречи с ней.
Связанная с ТЯН трудность заключается в том, что она возникает при ясном небе в отсутствие дисперсного вещества, такого как облака. Многие существующие способы обнаружения турбулентности зависят от наличия дисперсного вещества (влаги, пыли и т.д.) в воздухе, что препятствует их применению при обнаружении ТЯН на крейсерских высотах, на которых могут летать летательные аппараты (гражданские, военные или беспилотные летательные аппараты (БЛА). Например, при чистом небе на высоте, на которой летают авиалайнеры, ТЯН часто необнаружима доплеровскими радарными или лидарными системами, работа которых основана на наличии частиц в воздухе.
Предшествующие работы показали, что технически возможно обнаружить ТЯН при помощи излучения сигналов GPS. Однако ранее разработанные способы не позволяли решить задачу точного определения местоположения турбулетности относительно расстояния до приемника GPS. Предыдущие способы могли только определить наличие турбулентности где-то на пути распространения сигнала (вдоль линии визирования спутника). Другие способы оценки слишком дороги или сложны, чтобы их можно было практически реализовать на борту летательного аппарата.
Таким образом, желательно иметь экономичную систему и способы для обнаружения ТЯН с целью повышения пропускной способности системы управления воздушным движением посредством более точного определения дальности и высоты турбулентности, прежде чем летательный аппарат войдет в зону турбулентности. Желательно также иметь систему и способы, которые позволяют системам управления воздушным движениям и диспетчерам более точно осуществлять планирование для уклонения от встречи с этими зонами турбулентности.
Другие желательные признаки и характеристики вариантов осуществления настоящего изобретения станут очевидны из последующего подробного описания и прилагаемой формулы, взятых совместно с сопроводительными чертежами, а также с вышеприведенной характеристикой области и уровня техники.
Сущность изобретения
Раскрыты система и способы для расчета дальности от антенной платформы до воздушной турбулентности. Способы позволяют определить значение корреляционного запаздывания, соответствующее временному сдвигу при распространении интерференционной картины от первой антенны до второй антенны, которая отделена расстоянием от первой антенны. На основе значения корреляционного запаздывания и разнесения антенн способы позволяют вычислить дальность от антенной платформы до воздушной турбулентности и выдать предупреждение с указанием дальности.
Способы позволяют определить значение корреляционного запаздывания посредством снятия замеров первой последовательности амплитуд/фаз интерференционной картины для получения первой амплитудно-фазовой картины и снятия замеров второй последовательности амплитуд/фаз интерференционной картины для получения второй амплитудно-фазовой картины. Затем в способах рассчитывают коэффициенты временной корреляции между первой и второй последовательностью амплитуд/фаз интерференционной картины для последовательных значений времени запаздывания, чтобы определить, насколько хорошо амплитудно-фазовые картины соответствуют каждому времени запаздывания. В способах выбирают время запаздывания, соответствующее наибольшему значению вычисленного коэффициента временной корреляции, при которых амплитудно-фазовые картины наиболее близко совпадают. Значение времени запаздывания с наибольшей корреляцией является значением корреляционного запаздывания.
Значение корреляционного запаздывания и разнесение антенн от первой антенны до второй антенны используются для расчета дальности до зоны турбулентности. Может быть выдано предупреждение с указанием дальности до зоны турбулентности.
Различные примеры реализации изобретения, описанные в настоящей заявке, позволяют рассчитать дальность до зоны турбулентности для следующих сценариев: антенная платформа является стационарной или передвижной и (или) зона турбулентности является неподвижной или подвижной; антенная платформа находится в зоне прямой видимости спутника; или антенны разнесены по горизонтали и (или) по вертикали.
Описанные в настоящей заявке способы позволяют повысить пропускную способность системы управления воздушным движением посредством более точного определения местоположения (дальность и высоту) зоны турбулентности, что позволяет операторам систем управления воздушным движением и диспетчерам более точно планировать недопущение встречи с этими зонами турбулентности.
Краткое описание чертежей
Более полное понимание настоящего изобретения можно получить, если обратиться к подробному описанию и формуле с учетом прилагаемых чертежей, на которых всюду подобные номера позиций относятся к подобным элементам.
Фиг.1 - схематическое изображение среды для определения местоположения воздушной турбулентности.
Фиг.2 - схематическое изображение системы, выполненной с возможностью определения местоположения воздушной турбулентности.
Фиг.3 - блок-схема последовательности операций, иллюстрирующая процесс определения местоположения воздушной турбулентности.
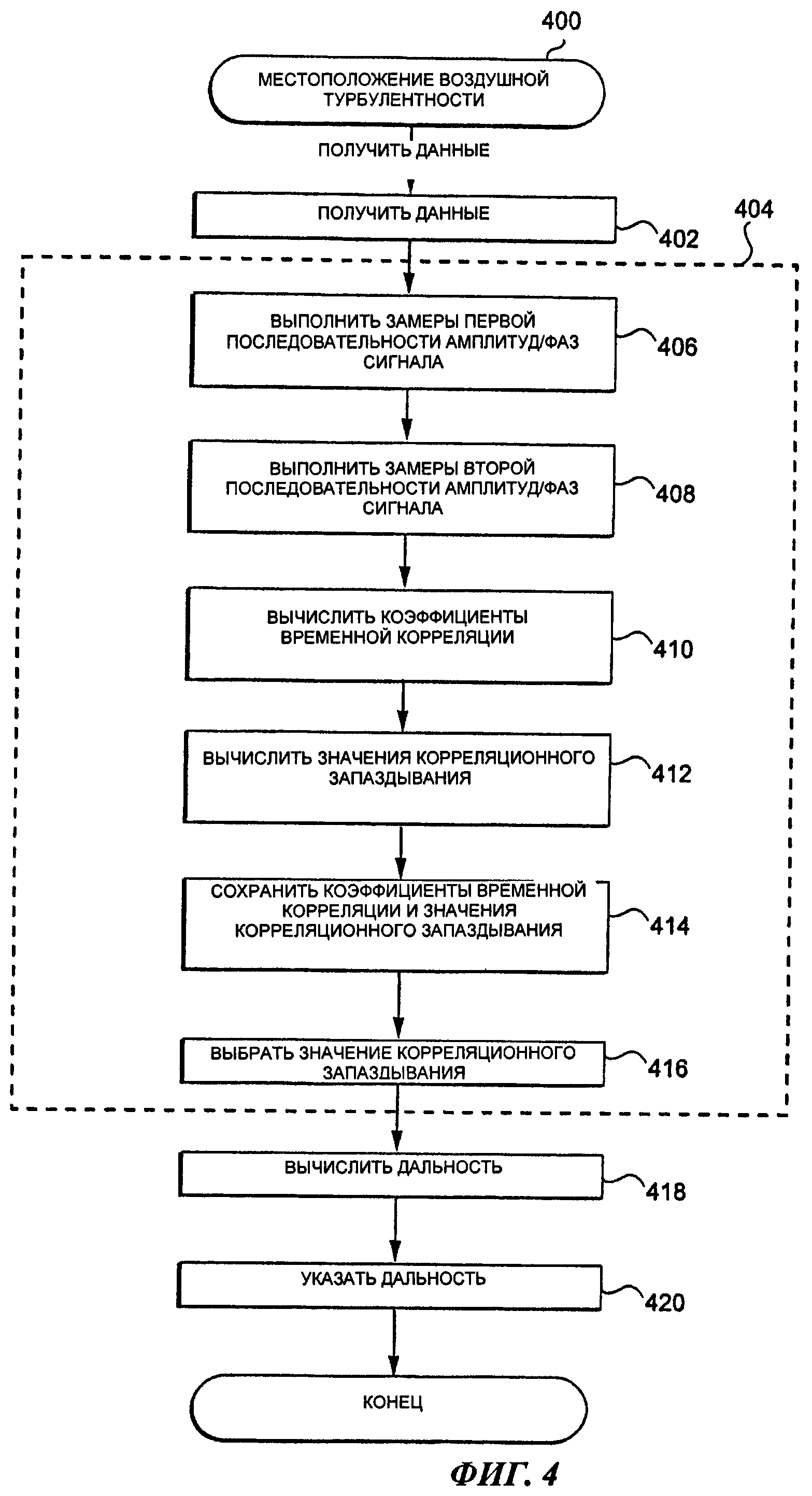
Фиг.4 - блок-схема последовательности операций, иллюстрирующая другой процесс определения местоположения воздушной турбулентности.
Фиг.5 иллюстрирует пример амплитудных картин, полученных в результате замеров на каждой антенне.
Фиг.6 иллюстрирует пример зависимости коэффициентов временной корреляции от значений корреляционного запаздывания.
Фиг.7 иллюстрирует корреляционные пики для различных значений дальности до турбулентности.
Подробное описание
Нижеследующее подробное описание служит лишь в иллюстративных целях и не предполагает ограничения вариантов выполнения изобретения или применения и использования таких вариантов выполнения. Кроме того, не предполагается какого-либо ограничения, связанного с какой-либо явно выраженной или подразумеваемой теорией, изложенной в вышеприведенных разделах, относящихся к области техники, уровню техники или сущности изобретения, либо в нижеприведенном подробном описании.
Варианты выполнения изобретения могут быть описаны в настоящей заявке посредством функциональных компонентов и (или) компонентов логических блоков, а также посредством различных этапов способа. Следует иметь в виду, что такие компоненты блоков могут быть реализованы любым количеством аппаратных, программных и (или) аппаратно-программных компонентов, выполненных с возможностью выполнения указанных функций. Например, в варианте выполнения изобретения могут использоваться различные компоненты интегральных схем, например элементы памяти, элементы обработки цифровых сигналов, логические элементы, просмотровые таблицы или тому подобные элементы, которые могут выполнять различные функции под управлением одного или нескольких микропроцессоров или других управляющих устройств. Кроме того, специалистам в данной области техники должно быть понятно, что варианты выполнения настоящего изобретения могут применяться в сочетании с любыми системами связи и любыми платформами, и что описанные в настоящей заявке системы служат лишь одним примером выполнения изобретения.
Для краткости обычные методы, относящиеся к обработке сигналов, передаче данных, подаче сигналов, измерениям и другим функциональным аспектам систем (и отдельных рабочих компонентов систем), могут не описываться подробно в настоящей заявке. Кроме того, подразумевается, что соединительные линии, приведенные на различных чертежах, содержащихся в настоящей заявке, представляют собой пример функциональных связей и (или) физических связей между различными элементами. Следует заметить, что в варианте выполнения изобретения может иметься множество альтернативных или дополнительных функциональных или физических связей.
В нижеследующем описании говорится, что элементы, узлы или характеристики "соединены" или "связаны" друг с другом. В настоящей заявке термин "соединен" означает, что, если иное не указано явным образом, один элемент/узел/характеристика непосредственно соединена (или непосредственно осуществляет связь) с другим элементом/узлом/характеристикой и необязательно механическим образом. Аналогично, если явным образом не указано иное, термин "связанный" означает, что один элемент/узел/характеристика непосредственно или опосредованно соединен (или непосредственно или опосредованно осуществляет связь) с другим элементом/узлом/характеристикой, и необязательно механическим образом. Таким образом, хотя среда, приведенная на фиг.1, и схема, приведенная на фиг.2, изображают пример компоновки элементов, в варианте выполнения изобретения могут иметься дополнительные промежуточные элементы, устройства, характеристики или компоненты (при условии, что это не отразится отрицательным образом на функциональности схемы).
В большинстве атмосферных турбулентностей из-за разности температур поднимаются и падают с различными скоростями ячейки воздуха, называемые турбулами. (В качестве аналогии представьте себе турбулы в виде пузырьков теплого воздуха, поднимающихся в море холодного воздуха). Зона турбулентного воздуха содержит множество турбул различных размеров. Каждая турбула влияет на электромагнитные волны по принципу линзы: она преломляет световые или радиочастотные волны, когда волны проходят через нее. Это преломление слегка изменяет фазу волн и направление их распространения. Электромагнитный сигнал от удаленного источника, такого как спутник, распространяется как плоская волна до тех пор, пока волновой фронт не достигнет зоны турбулентности: все точки волнового фронта распространяются по существу по параллельным траекториям. Однако внутри зоны турбулентности путь распространения сигнала претерпевает изменения фазы и направления, которые отличаются от изменений, которые претерпевают соседние пути распространения. Таким образом, сигнал, попадающий в зону турбулентности, перестает быть плоской волной, а каждая точка на волновом фронте распространяется в несколько другом направлении с другой фазой. По мере дальнейшего распространения элементов волны они создают области усиливающей и ослабляющей интерференции друг с другом. Пространственную интерференционную картину интенсивности сигнала и фазы сигнала можно измерить, помещая приемник в различные места. Пространственная интерференционная картина меняется во времени по мере перемещения турбул в зоне турбулентности и по мере перемещения источника сигнала, например, спутника, по отношению к зоне турбулентности.
С целью лучшего понимания предположим, что область турбулентности заменили одной большой неподвижной линзой, и что платформа, принимающая спутниковый сигнал, также не перемещается. С точки зрения наблюдателя, находящегося на платформе и наблюдающего за перемещением спутника по небу, источник спутниковых сигналов от единственного спутника кажется перемещающимся в поперечном направлении, поскольку у самого спутника имеется поперечная скорость. Когда спутник перемещается в такое место, что линза оказывается между платформой и спутником, платформа не увидит спутник и не зарегистрирует его сигнал, если спутник, линза и платформа не будут расположены относительно друг друга таким образом, чтобы линза фокусировала сигнал в месте расположения платформы. (Фокальная точка соответствует пику на описанной выше интерференционной картине). Затем, когда спутник перемещается дальше по небу, линза фокусирует спутниковый сигнал в другое место. (Это соответствует поперечному смещению всей интерференционной картины).
В примерах реализации изобретения определяется временной интервал, соответствующий временному смещению при приеме распространения интерференционной картины от первой антенны в первом месте до второй антенны во втором месте, и вычисляется дальность турбулентности на основе этого временного интервала, что более подробно описано ниже.
На фиг.1 приведено схематическое представление среды 100 согласно примерному варианту выполнения изобретения. Среда 100 использует множество спутниковых приемных антенн 118/116 (передние/задние), расположенных на платформе 114 (которая может быть стоящим на земле или летящим летательным аппаратом, неподвижным или перемещающимся судном, неподвижным или перемещающимся наземным транспортным средством или любой конструкцией подходящей конфигурации) для приема сигналов от спутника 102. В этом примере интерференционная картина 108 (имеющая вид, как указано в предыдущем абзаце), на которую воздействует зона 106 турбулентности, пересекает заднюю антенну 116 в первое значение 120 времени и пересекает переднюю антенну 118 во второе значение 122 времени. Алгоритм определения псевдодальности, описанный ниже, оценивает дальность 126 зоны 106 турбулентности посредством анализа временных интервалов (или временных сдвигов) между первым и вторым значениями времени.
На фиг.2 приведен схематический вид системы 200, выполненной в соответствии с вариантом выполнения изобретения. Различные блоки, изображенные на фиг.2, могут быть реализованы при помощи любого количества физических компонентов или модулей, расположенных на платформе или системе 200. Практически реализуемая система 200 может включать в себя ряд электрических блоков управления, систем связи, бортовых компьютерных систем, архитектуры измерений, сетей и компонентов, отличных от тех, что приведены на фиг.2. Обычные подсистемы, характеристики и аспекты системы 200 в настоящей заявке подробно не описаны.
В целом система 200 включает в себя множество антенн, которые включают в себя первую антенну 214 и вторую антенну 216, приемник 220, логический элемент 222 обработки, который содержит модуль 224 коррелятора, модуль 226 памяти, который включает в себя или осуществляет связь с таблицей коэффициентов временной корреляции и соответствующими значениями 228 корреляционного запаздывания, и архитектуру 230 сети связи.
Первая антенна 214 и вторая антенна 216 соединены с приемником 220 и выполнены с возможностью предоставления данных, необходимых для вычисления турбулентности описанным ниже образом. Антенны могут быть разнесены на некоторое расстояние L0 вдоль длины или ширины платформы, или разнесены на расстояние Н° вдоль высоты платформы. Каждая антенна откликается на падающую на нее электромагнитную энергию и создает принятую интерференционную картину, причем электромагнитная энергия распространяется по пути, который подвергается воздействию зоны 106 турбулентности.
Примеры вариантов выполнения изобретения требуют по меньшей мере двух антенн. Однако в зависимости от конструкции платформы нормальные перемещения платформы могут привести к блокировке спутниковых сигналов или к значительному затуханию вследствие многолучевого распространения. В связи с этим могут потребоваться альтернативные места размещения антенн. Платформа может включать в себя, в частности, летательные аппараты, суда, наземные транспортные средства или наземные конструкции. Например, в случае летательного аппарата можно, в частности, использовать три антенны: одна антенна может быть расположена на вертикальном стабилизаторе и (или) на законцовках крылев, а две антенны могут быть расположены на фюзеляже для получения множества входных сигналов от определенного спутника. Можно добавить дополнительные антенны для приема сигналов от дополнительных источников данных, которые компенсировали бы изменения сигнала вследствие движения летательного аппарата (например, поворота, подъема, снижения). Спутниковый сигнал может, в частности, быть сигналом GPS, сигналом GPS плюс ГЛОНАСС плюс Галилео или сигналом GPS плюс сигнал iGPS.
Приемник 220 связан с антеннам и выполнен с возможностью изменения свойств принятых интерференционных картин. Сигналы, принятые антеннами, анализируются в соответствии с алгоритмом для сравнения относительного движения платформы (например, летательного аппарата) с относительным движением спутника. В этом алгоритме сравнения используется то обстоятельство, что спутники, например спутники GPS, передают набор кодов, которые содержат информацию о положении и скорости спутников, о системном времени GPS, об ошибке источника тактовых сигналов и о цельности и точности данных. Эта информация позволяет предсказать относительное положение и движение спутника GPS с высокой точностью.
Например, в целом приемник GPS на борту летательного аппарата сравнивает код грубого определения местоположения (С/А) от каждого спутника с точной копией кода, содержащегося в базе данных приемника. Смещая код приемника таким образом, чтобы он совпал с сигналом от спутника, и сравнивая это смещение с внутренними часами спутника, приемник может оценить расстояние до спутника. Однако при помощи множества антенн и описанных в настоящей заявке алгоритмов определения псевдодальности можно также оценить дальность зоны 106 турбулентности посредством анализа фазовых и временных сдвигов сигнала GPS.
Кроме того, положение и относительное движение летательного аппарата измеряются с высокой точностью бортовыми компьютерными системами управления полетом (не показаны на фиг.2). Эти данные наряду с расстоянием от летательного аппарата до спутника и скоростью спутника затем используются для вычисления дальности до зоны 106 турбулентности при помощи алгоритма определения псевдодальности, которые более подробно описаны ниже. Приемник 220 может быть, в частности, приемником GPS, приемником GPS плюс ГЛОНАСС и Галилео или приемником GPS плюс iGPS.
Логический элемент 222 обработки связан с приемником 220 и может включать в себя любое количество отдельных модулей обработки, корреляторов или компонентов, выполненных с возможностью выполнения заданий, процессов и операций, более подробно описанных в настоящей заявке. Хотя на фиг.2 приведен только один блок обработки, при практической реализации может использоваться любое количество отдельных физических и (или) логических процессоров, которые могут быть распределены по системе 200. На практике логический элемент 222 обработки может быть реализован и выполнен при помощи процессора общего назначения, ассоциативной памяти, процессора цифровых сигналов, специализированной интегральной схемы, программируемой вентильной матрицы, любого подходящего программируемого логического устройства, логического элемента на дискретных компонентах или транзисторного логического элемента, дискретных аппаратных компонентов или любого сочетания перечисленного, предназначенного для выполнения функций, описанных в настоящей заявке. Процессор может быть реализован в виде микропроцессора, контроллера, микроконтроллера или конечного автомата. Процессор может также быть реализован в виде сочетания вычислительных устройств, например сочетания процессора цифровых сигналов и микропроцессора, множества микропроцессоров, одного или нескольких микропроцессоров в сочетании с ядром процессора цифровых сигналов либо в виде любой другой такой конфигурации.
Модуль 224 корреляторов связан с логическим элементом 222 обработки или реализован в нем и выполнен с возможностью вычисления коэффициентов временной корреляции r(Δt)s и соответствующих корреляционных запаздываний Δts и выбора значения корреляционного запаздывания так, как более подробно описано ниже со ссылкой на фиг.4. Модуль 224 корреляторов может включать в себя, в частности, параллельные корреляторы обработки или последовательные корреляторы обработки. Значение корреляционного запаздывания представляет собой промежуток времени между изменениями сигнала на передней антенне и изменениями сигнала на Δt позже на задней антенне, и коэффициенты временной корреляции служат мерами того, насколько хорошо амплитудные/фазовые картины совпадают на каждой антенне в каждое время запаздывания Δt, как более подробно описано ниже со ссылкой на фиг.4-7.
Модуль 226 памяти может быть любой подходящей областью хранения данных с подходящим объемом памяти, которая отформатирована для поддержки работы системы 200. Модуль 226 памяти выполнен с возможностью сохранения, хранения и предоставления данных, необходимых для поддержки функциональных возможностей системы 200 описанным ниже образом. В реализуемых на практике вариантах выполнения модуль 226 памяти может быть реализован в виде оперативной памяти, флэш-памяти, постоянной памяти, стираемой программируемой постоянной памяти, электрически стираемой программируемой постоянной памяти, регистров, жесткого диска, сменного диска или любой другой формы носителя данных, известной из уровня техники. Модуль 226 памяти может быть связан с логическим элементом 222 обработки и выполнен с возможностью хранения, в частности, значений измеренных данных, соответствующих положению и скорости платформы, положениям и скоростям спутников, последовательностям амплитуд/фаз интерференционной картины и интервалу взятия замеров. Кроме того, модуль 226 памяти может представлять собой динамически обновляющуюся базу данных, содержащую таблицу коэффициентов временной корреляции и соответствующих значений корреляционного запаздывания 228 с целью вычисления дальности до зоны 106 турбулентности при помощи алгоритма определения псевдодальности, более подробно описанного ниже.
Архитектура 230 сети связи может быть связана с логическим элементом 222 обработки и с архитектурой измерений (не показана на фиг.2). Архитектура 230 сети связи выполнена с возможностью передачи и сообщения данных о ТЯН. Данные о ТЯН являются одним из множества источников информации о погоде, которые могут быть объединены как для повышения точности сообщений о текущей погоде, так и предсказаний погоды во время полета. Данные о ТЯН направляются от поставщиков услуги предоставления данных о ТЯН программному приложению через архитектуру 230 сети связи. Архитектура 230 сети связи может быть, в частности, наземной сетью связи или беспроводной сетью связи, такой как спутниковая сеть связи. Набор промежуточного программного обеспечения, такой как система общесистемного управления информацией (SWIM), автоматически считывает данные из многих источников через архитектуру 230 сети связи, и переформатирует данные так, как требуется для использования многими различными пользователями и приложения. Система SWIM обеспечивает интеграцию информации о характере погоды, конфигурацию летательного аппарата, отслеживание ТЯН в режиме реального времени и показания доплеровского погодного радара. В связи с этим система 200 может выдавать пользователям архитектуры 230 сети связи предупреждение с указанием дальности до зоны 106 турбулентности.
В примерах вариантов выполнения изобретения дальность до зоны турбулентности вычисляется на основе: вектора измеренной скорости платформы относительно вектора скорости спутника; расстояния 124 от спутника до платформы 114; скорости спутника; и скорости/вектора скорости интерференционной картины Vi, на которую воздействует зона 106 турбулентности, как более подробно описано ниже.
Как показано на фиг.1, если спутник 102 движется вправо со скоростью Vs на постоянном расстоянии 124 (Rs) от платформы 114, и платформа 114 и зона 106 турбулентности неподвижны, то расстояние 126 (Rt) от платформы 114 до зоны 106 турбулентности является постоянным, и единственным движущимся объектом является спутник 102. В этом случае горизонтальная скорость Vi, с которой интерференционная картина 108, как кажется, перемещается (в предположении, что сигнал со спутника представляет собой прямую линию в пространстве), описывается соотношением:

Расстояние Rt до зоны 106 турбулентности можно получить перестановкой членов формулы (1):

Как следует из формулы (2), расстояние Rt между зоной 106 турбулентности и платформой 114 является функцией от известных дальности Rs и скорости спутника Vs (обе эти величины можно определить по навигационным данным, предоставляемым спутником), и неизвестной скорости Vi изображения спутника, отбрасываемого зоной 106 турбулентности. Значение Vi можно определить как функцию от промежутка времени Δt между изменениями сигнала на передней антенне и изменениями сигнала спустя промежуток времени Δt на задней антенне, как более подробно описано ниже со ссылкой на фиг.3. Эти изменения сигнала могут представлять собой изменения амплитуды/фазы сигнала, фазы сигнала или и того и другого.
На фиг.3 приведена блок-схема последовательности операций, которая иллюстрирует процесс 300 определения местоположения турбулентности для определения местоположения зоны турбулентности согласно варианту выполнения изобретения. Различные задачи, выполняемые в связи с процессом 300, могут выполняться программными средствами, аппаратными средствами, программно-аппаратными средствами или любым сочетанием вышеперечисленного. В иллюстративных целях нижеследующее описание процесса 300 может ссылаться на элементы, упомянутые выше в связи с фиг.1 и фиг.2. При практической реализации вариантов выполнения этапы процесса 300 могут выполняться различными элементами системы 200, например первой антенной 214, второй антенной 216, приемником 220, логическим элементом 222 обработки, модулем 224 коррелятора, модулем 226 памяти и архитектурой 230 сети связи.
Процесс 300 может начаться получением данных изменения для вычисления дальности на основе значения корреляционного запаздывания (этап 302). Например, данные измерений могут включать в себя, в частности: горизонтальную скорость платформы, горизонтальную скорость спутника, горизонтальную скорость зоны турбулентности, разнесение антенн по горизонтали, расстояние от платформы до спутника, вертикальную скорость платформы, вертикальную скорость спутника, вертикальную скорость зоны турбулентности и разнесение антенн по вертикали.
Как показано выше, Vi, неизвестное значение скорости интерференционной картины 108, описанное в формуле (1), можно определить как функцию от промежутка времени Δt. Поэтому в процессе 300 затем определяется промежуток времени Δt (значение корреляционного запаздывания), соответствующий временному сдвигу при приеме распространения интерференционной картины на первой антенне и на второй антенне (этап 304), как подробно описано ниже со ссылкой на фиг.4, и осуществляется переход к вычислению дальности Rt (этап 306) на основе промежутка времени Δt.
В различных вариантах выполнения изобретения, описанных в настоящей заявке, вычисляется дальность Rt до зоны турбулентности на основе следующих сценариев: платформа и (или) зона турбулентности являются неподвижными или перемещающимися; платформа находится на линии визирования спутника, близкой к горизонтальной; или антенны разнесены по горизонтали и вертикали, как более подробно описано ниже.
В одном варианте выполнения (см. фиг.1) задняя антенна 116 и передняя антенна 118 разнесены по горизонтали, а платформа 114 и зона 106 турбулентности неподвижны. Антенны могут быть разнесены на платформе 114 на расстояние L0. В этом примере интерференционная картина 108 пересекает заднюю антенну в момент времени t1 (обозначенному позицией 120) и через промежуток времени Δt изображение пересекает переднюю антенну 118 в момент времени t2 (обозначенный позицией 122).
Скорость интерференционной картины Vi вычисляется на основе промежутка времени Δt между пересечением интерференционной картиной этих двух антенн. Скорость перемещения интерференционной картины определяется из соотношения:

Подстановка Vi из формулы (3) в формулу (2) дает соотношение для расчета дальности Ri до зоны турбулентности в зависимости от промежутка времени Δt.
Таким образом, согласно первому варианту выполнения способ позволяет вычислить дальность Ri из соотношения:

где Rt - дальность от неподвижной зоны турбулентности до неподвижной платформы, Rs - расстояние между неподвижной платформой и спутником, L0 - разнесение по горизонтали первой и второй антенн, Δt - горизонтальная скорость спутника и Δt - корреляционное запаздывание.
Во втором варианте выполнения задняя антенна и передняя антенна разнесены по горизонтали, а зона турбулентности неподвижна, как и вышеуказанном случае, однако платформа движется (в отличие вышеприведенного первого варианта выполнения). Поэтому приведенные выше уравнения необходимо скорректировать для учета движения платформы. В этом случае интерференционная картина достигает задней антенны в момент времени t1. В этот момент (t1) передняя антенна находится на расстоянии L0. Однако когда интерференционная картина достигает первоначального местоположения (местоположения в момент времени t1) передней антенны (в момент времени t2), вторая антенна успела переместиться (не показано на фиг.1). Изображение в конечном счете догоняет переднюю антенну в момент времени t3 (не показано на фиг.1). Промежуток времени в этом случае описывается формулой (5):

В уравнении (5) Va - скорость платформы. Поэтому скорость интерференционной картины вычисляется на основе соотношения:

Подстановка уравнения (6) в уравнение (2) дает дальность Rt до зоны 106 турбулентности.
Таким образом, согласно второму варианту выполнения дальность в способе вычисляется из соотношения:

где Rt - дальность от зоны турбулентности до передвижной платформы, Rs, L0 и Δt объяснены выше, a Va - горизонтальная скорость платформы.
В первом и втором вариантах выполнения дальность Rt до зоны турбулентности вычисляется исходя из неподвижности турбулентной воздушной массы. Однако так может быть не всегда, поскольку ветер может перемещать область турбулентности.
В третьем варианте выполнения задняя антенна и передняя антенна разнесены по горизонтали так, как показано выше, но в отличие от первого и второго вариантов выполнения перемещаются и зона турбулентности, и платформа. Эта ситуация математически описывается при помощи формулы (8):

Подстановка формулы (8) в формулу (2) дает дальность Rt.
Таким образом, согласно третьему варианту выполнения дальность Rt в способе вычисляется на основе соотношения:

где Rt - дальность от перемещающейся зоны турбулентности до перемещающейся платформы, Rs, L0, Δt и Va объяснены выше, a Vt - горизонтальная скорость зоны турбулентности.
Формула (9) позволяет получить дальность Rt как функцию промежутка времени Δt и скорости ветра Vt. Формулу (9) можно использовать в указанном виде, когда известны скорости ветров. Так может быть в регионах, где регулярно проводятся измерения, таких как Северная Америка, Европа, Австралия и территории вблизи Японии. Если известно, что ветры являются примерно постоянными вдоль вектора от платформы к спутнику, то для получения дальности Rt можно вставить значение Vt в формулу (9). В случае, когда ветры плавно изменяются вдоль вектора от платформы к спутнику (кроме ветров в зоне турбулентности), то можно использовать значение Rt в нулевом приближении для выбора местоположения, в котором можно оценить Vt с использованием трехмерной модели. Это значение Vt подставляют в формулу (9) для получения оценки нового значения Rt. Этот процесс повторяется до тех пор, пока не сойдется к единственному значению Rt и Vt.
Горизонтальное перемещение воздушных масс размером с Техас обычно измеряется в десятках метров в секунду. Вертикальное движение аналогичных воздушных масс измеряется в сантиметрах в секунду. В связи с этим почти во всех случаях можно без опасения предполагать, что зона турбулентности имеет эффективную вертикальную скорость, равную нулю. Поэтому разнесенные по вертикали спутниковые антенны можно использовать для измерения вертикальной скорости интерференционной картины, при этом можно быть уверенным, что эта вертикальная скорость почти полностью определяется известным движением спутника, известным движением платформы и неизвестной дальностью от платформы до зоны турбулентности.
В четвертом варианте выполнения, в отличие от первого, второго и третьего вариантов выполнения, описанных выше, первая антенна и вторая антенна разнесены по вертикали, а платформа и область турбулентности неподвижны.
Согласно четвертому варианту выполнения в способе вычисляется дальность Rt из соотношения:

где Rt - дальность от неподвижной зоны 106 турбулентности до неподвижной платформы, Rz и Δt объяснены выше, H0 - разнесение по вертикали первой и второй антенн, и Vsz - вертикальная скорость спутника.
В пятом варианте выполнения первая антенна и вторая антенна разнесены по вертикали, а зона турбулентности неподвижна, как и в случае четвертого варианта выполнения, описанного выше, но, в отличие от четвертого варианта выполнения, платформа в данном случае является подвижной.
Согласно пятому варианту выполнения способ позволяет вычислить дальность Rt из соотношения:

где Rt - дальность от неподвижной зоны турбулентности до подвижной платформы, Rs, H0, Δt и Vsz объяснены выше, a Vaz - вертикальная скорость платформы.
В шестом варианте выполнения первая антенна и вторая антенна разнесены по вертикали, а платформа подвижна, как и в случаях четвертого и пятого вариантов выполнения, но в отличие от четвертого и пятого вариантов выполнения, и платформа, и зона турбулентности в этом случае перемещаются.
Согласно шестому варианту выполнения способ позволяет вычислить дальность из соотношения:

где Rt - дальность от движущейся зоны турбулентности до движущейся платформы, Rs, H0, Δt, Vaz и Vsz объяснены выше, a Vtz - вертикальная скорость зоны турбулентности.
В седьмом варианте выполнения линия визирования летательный аппарат-спутник на несколько градусов отличается от горизонтальной. Кроме того, в седьмом варианте выполнения первая антенна и вторая антенна разнесены по вертикали, а платформа и зона турбулентности перемещаются, как и в случае шестого варианта выполнения. Однако в отличие от шестого варианта выполнения в параметры вносится коррекция на линию визирования платформа-спутник.
Таким образом, согласно седьмому варианту выполнения способ позволяет вычислить дальность из соотношения:

где Rt - дальность от движущейся зоны турбулентности до движущейся платформы, причем Rt скорректирована для линии визирования платформа-спутник, Rs - расстояние между движущейся платформой и спутником, Vt_el - вертикальная скорость движущейся зоны турбулентности в проекции на единичный вектор возвышения, H0_el - разнесение первой и второй антенн по вертикали в проекции на единичный вектор возвышения, Δt - корреляционное запаздывание, как указано выше, Va_el - вертикальная скорость движущейся платформы в проекции на единичный вектор возвышения, Vs_el - вертикальная скорость спутника в проекции на единичный вектор возвышения, и e - единичный вектор возвышения, E, вектора "летательный аппарат-спутник", Rs. Вектор E - это направление возрастающего угла возвышения. Вектор E вертикален, когда вектор Rs горизонтален, но он отклоняется от вертикали, когда вектор Rs не горизонтален, то есть когда спутник с платформы виден не точно на горизонте. Вектор Е определяется следующим образом:

где E, Rs и k - векторные величины, k - единичный вектор в направлении z (вертикальном), знак "×" обозначает векторное произведение, а вертикальные черты обозначают модуль вектора. Для вычисления проекции любого вектора на вектор Е используется скалярное произведение:

Например, значение Vt_el можно вычислить по формуле (13b), то есть

Заметим, что в случаях, когда вектор "платформа-спутник" сильно отличается от горизонтального, Vt_el нельзя считать равной нулю.
После вычисления дальности до зоны турбулентности согласно вышеприведенным вариантам выполнения процесс 300 выдает предупреждение с указанием дальности (этап 308) и прекращается.
Как описано выше, турбулентные воздушные массы смещают фазу спутникового сигнала, и поскольку воздушная масса имеет "объемную" преломляющую способность, сдвиг фазы изменяется в зависимости от пути прохождения сигнала. Это превращает упорядоченный, однородный спутниковый сигнал в интерференционную картину. В целом интерференционная картина представляет собой картину из пиков и впадин, которая возникает, когда два или более сигналов, распространяющихся немного отличающимися путями от одного и того же источника, сходятся вместе. Интерференционная картина меняется во времени и в зависимости от положения. Сначала интерференционную картину обнаруживает ведущая антенна, за которой следует ведомая антенна, и устанавливает разность времени между обнаружением интерференции на ведущей и ведомой антеннах для вычисления дальности Rt до зоны турбулентности, о чем более подробно сказано ниже.
На фиг.4 приведена блок-схема последовательности действий, которая иллюстрирует процесс 44 определения местоположения воздушной турбулентности согласно варианту выполнения изобретения. Различные этапы, выполняемые в связи с процессом 400, могут выполняться программными средствами, аппаратными средствами, программно-аппаратными средствами или любым сочетанием вышеперечисленного. В иллюстративных целях нижеследующее описание процесса 400 может ссылаться на элементы, упомянутые выше в связи с фиг.1, фиг.2 и фиг.3. В реализуемых на практике вариантах выполнения части процесса 400 могут выполняться различными элементами системы 200, например первой антенной 214, второй антенной 216, приемником 220, логическим элементом 222 обработки, модулем 224 коррелятора, модулем 226 памяти и архитектурой 230 сети связи.
Процесс 400 может начаться получением данных измерений для вычисления дальности на основании значения корреляционного запаздывания (этап 402) так, как объяснено выше со ссылкой на фиг.3. В этом варианте выполнения для измерения разности времени между ведущей (передней) антенной и ведомой (задней) антеннами используются методы временной корреляции. Корреляция сигналов от ведущей и ведомой антенн дает корреляционный пик при значении Δt, соответствующем временному сдвигу, вызванному зоной турбулентности, при приеме интерференционной картины на ведущей и ведомой антеннах (скорость изображения от спутника корректируется с учетом перемещения самолета, ветра и т.д.). Этот вариант выполнения изобретения позволяет вычислить коэффициент корреляции r(Δt) для многих значений Δt и выбрать коэффициент корреляции с наибольшим значением (пиковые значения корреляции) в качестве характеристики дальности до места наибольшей турбулентности. В этом варианте выполнения коэффициент корреляции вычисляется с использованием измерений амплитуды сигналов на ведущей и ведомой антеннах. В альтернативных вариантах выполнения для вычисления коэффициентов корреляции могут использоваться измерения фазы сигналов или сочетание фазы сигнала и амплитуды сигнала.
Когда скорость Vi интерференционной картины почти в точности равна скорости платформы, то временной сдвиг Δt для интерференционной картины, характеризующий перемещение от одной антенны к другой, может составлять несколько секунд. Максимальный коэффициент корреляции r(Δt) может уменьшаться при более длительных Δt, поскольку картина турбулентности меняется со временем. Временная когерентность означает коррелированность или предсказуемое соотношение между сигналами, наблюдаемыми в различные моменты времени. В предпочтительном варианте выполнения интервал временной когерентности для турбулентности используется для уменьшения значений r(Δt) при небольших Δt и для увеличения значений r(Δt) при больших Δt для получения несмещенного сравнения мощности турбулентности при всех значениях дальности.
Таким образом, процесс 400 переходит к вычислению значения корреляционного запаздывания (блок 404) посредством выполнения замеров первой последовательности амплитуд/фаз сигналов, соответствующей интерференционной картине на задней антенне (этап 406), и выполнения замеров второй последовательности амплитуд/фаз сигналов, соответствующей интерференционной картине на передней антенне (этап 408). В этом варианте выполнения первые и вторые последовательности амплитуд/фаз сигналов замеряются на одном и том же интервале снятия замеров. На фиг.5 приведен пример амплитудных картин, снятых с каждой антенны. Первая последовательность амплитуд 502 сигналов интерференционной картины 108 снимается на передней антенне 118, а вторая последовательность амплитуд 504 сигналов интерференционной картины 108 снимается на задней антенне 116. В этом примере на каждой антенне выполнено 256 замеров.
Спутник в этом примере находится в низкой околоземной орбите. Платформа в этом примере - самолет. Направление движения спутника составляет примерно 125° от направления к носу самолета, то есть кажется, что спутник движется назад относительно самолета. Скорость спутника Vs составляет приблизительно 7000 метров в секунду, но лишь приблизительно 4000 м/с в направлении, перпендикулярном линии визирования "самолет-спутник". Расстояние от самолета до спутника Rs составляет приблизительно 4200 км. Истинная скорость самолета Va составляет приблизительно 200 м/с. Передняя и задняя антенны разнесены приблизительно на 20 метров.
Затем в процессе 400 вычисляются коэффициенты временной корреляции r(Δt)s между первой последовательностью амплитуд 502 сигналов и второй последовательностью амплитуд 504 сигналов (этап 410), после чего вычисляются значения корреляционного запаздывания Δts, соответствующие коэффициентам временной корреляции (этап 412). Значение корреляционного запаздывания представляет собой промежуток времени между изменениями сигнала на передней антенне и изменениями сигнала через промежуток Δt на задней антенне (см. описание выше со ссылкой на фиг.1), и его значение вычисляется, например, посредством измерения времени, в которое амплитуда сигнала поступила (была зарегистрирована) на заднюю антенну, и вычитания его из времени поступления амплитуды сигнала на заднюю антенну. Временная когерентность означает корреляцию или предсказуемые соотношения между сигналами, наблюдаемыми в различные моменты времени. Таким образом, статистические согласование измеренных амплитуд сигналов на соответствующих антеннах определяют коэффициент временной корреляции (насколько хорошо совпадают амплитуды) при вычисленном значении Δt. В альтернативных вариантах выполнения для вычисления коэффициента временной корреляции используется фаза сигнала или сочетание фазы сигнала и амплитуды сигнала.
В процессе 400 сохраняются вычисленные коэффициенты временной корреляции и значения времени запаздывания (этап 414) и выбирается значение времени запаздывания, соответствующее наибольшему значению вычисленного коэффициента временной корреляции (этап 416). Например, на фиг.6 наибольшее значение коэффициентов временной корреляции имеет место при значении 4 для замеров 602 (в пике коэффициентов корреляции). Это означает, что если сигнал, достигающий передней антенны в момент времени ti, проникает в зону турбулентности в определенном месте, то в то же место проникает сигнал, достигающий задней антенны в момент времени ti+4. С учетом интервала снятия замеров примерно 0,05 секунд значение корреляционного запаздывания составляет приблизительно 0,2 секунды. При 20 метрах между антеннами (L0) это соответствует относительной скорости изображения Vi приблизительно 100 м/с в направлении хвоста самолета. Самолет перемещается со скоростью приблизительно 200 м/с, (Va), поэтому истинная скорость изображения Vi составляет приблизительно 100 м/с вперед. С учетом того, что спутник движется со скоростью 4000 м/с назад при дальности Rs приблизительно 4200 км, скорость изображения Vi, равная приблизительно 100 м/с, указывает, что проникновение в зону турбулентности произошло на расстоянии приблизительно 105 км от самолета.
На фиг.7 приведены корреляционные пики для различных дальностей в километрах (обозначены позициями 702-712) до зоны турбулентности. Как показано на фиг.7, значение корреляции в пике может иметь место как при положительных, так и при отрицательных значениях Δt. Отрицательные значения Δt возникают, когда скорость интерференционной картины Vi положительна и выше, чем у платформы, то есть интерференционная картина (последовательность амплитуд, на которую воздействовала зона турбулентности) воздействует на ведомую (заднюю) антенну раньше, чем на ведущую (переднюю) антенну. Такое может случаться в случае iGPS, когда GPS сигналы вырабатывают спутники на низких околоземных орбитах.
Заметим, что, как показано на фиг.7, с увеличением дальности корреляционный пик перемещается в сторону более положительных промежутков времени Δt. Однако в случае спутника, движущегося в обратном направлении, при определенной дальности имеется точка сингулярности. По мере приближения дальности к точке сингулярности, в данном случае приблизительно 200 км (не показано на фиг.7), корреляционный пик быстро перемещается, а затем перескакивает к отрицательным значениям Δts. Затем он приближается к точке отсчета (Δt=0) слева (обозначено позициями 702-706), асимптотически приближаясь к точке отсчета по мере увеличения дальности.
Затем в процессе 400 вычисляется дальность (этап 418) и выдается предупреждение, указывающее дальность (этап 420) так же, как было описано выше со ссылкой на фиг.3.
Описанные выше варианты выполнения изобретения позволяют определить дальность до центра зоны турбулентности. Однако, согласно другому варианту выполнения изобретения, может определяться толщина зоны турбулентности посредством изучения ширины корреляционного пика. У тонкой зоны корреляционный пик высокий и узкий (узкий относительно Δt), поскольку все турбулы находятся на одной и той же дальности и потому отбрасывают изображения, которые перемещаются с одной и той же скоростью. У толстой зоны пик более широкий, поскольку некоторые турбулы находятся дальше других, и потому изображение имеет множество компонент, которые перемещаются с несколько различными скоростями. При заданном количестве излучения спутникового сигнала интенсивность обратно пропорциональна взвешенной толщине зоны турбулентности. В связи с этим процесс 400 указывает на толстую зону турбулентности, с соответственно низкой интенсивностью турбулентности, если пик кривой временной корреляции относительно широк (широк относительно Δt), и указывает на тонкую зону турбулентности, с соответственно высокой интенсивностью турбулентности, если пик кривой временной корреляции относительно узок.
Варианты выполнения изобретения позволяют повысить пропускную способность системы управления воздушным движением посредством более точного определения местоположения (дальности и высоты) зоны турбулентности (в том числе ТЯН), что позволяет операторам систем управления воздушным движением и диспетчерам более точно планировать уклонение от встречи с зоной турбулентности для повышения безопасности и удобства пассажиров во время перевозки или путешествия.
Хотя в вышеприведенном подробном описании был представлен по меньшей мере один вариант выполнения, следует понимать, что существует большое число видоизменений. Следует также понимать, что приведенный вариант или варианты выполнения являются лишь примерами и никоим образом не подразумевают ограничения объема, области применении или конфигурации изобретения. Вернее, вышеприведенное подробное описание предоставляет специалистам в данной области техники удобное руководство к действию по реализации этого приведенного варианта или вариантов выполнения. Следует понимать, что функции и взаимное расположение элементов могут быть изменены без отступления от объема изобретения, определяемого прилагаемой формулой и ее юридическими эквивалентами.
Реферат
Изобретение относится к области приборостроения и может найти применение в бортовых системах для определения зоны воздушной турбулентности. Технический результат - расширение функциональных возможностей. Для достижения данного результата определяют значение корреляционного запаздывания, соответствующее временному сдвигу при приеме распространения интерференционной картины, распространяющейся вдоль пути, на который воздействует зона турбулентности. При этом временной сдвиг вызывают зоной турбулентности. Зона турбулентности находится на пути сигналов, отправленных со спутника на платформу летательного аппарата. Причем значение корреляционного запаздывания соответствует временному сдвигу при распространении принятой интерференционной картины относительно первой и второй антенны, расположенных на платформе летательного аппарата. На основе значения корреляционного запаздывания определяют дальность до зоны турбулентности от антенной платформы и формируют предупреждение о наличии турбулентности, с указанием расстояния до турбулентности. 2 н. и 14 з.п. ф-лы, 7 ил.
Формула
определяют значение корреляционного запаздывания в распространении интерференционной картины от первой антенны ко второй антенне на платформе, причем значение корреляционного запаздывания соответствует временному сдвигу при приеме распространения интерференционной картины относительно первой и второй антенны, при этом временной сдвиг вызывают зоной турбулентности, и зона турбулентности находится на пути сигналов, отправленных со спутника на платформу; и вычисляют расстояние до зоны турбулентности на основании значения корреляционного запаздывания.
выполняют замеры второй последовательности амплитуд сигнала, соответствующих интерференционной картине, на второй антенне с интервалом снятия замеров;
вычисляют коэффициенты временной корреляции между первой и второй последовательностями амплитуд сигнала;
вычисляют значения корреляционного запаздывания, соответствующие коэффициентам временной корреляции; и
выбирают значение корреляционного запаздывания, соответствующее наибольшему значению коэффициентов временной корреляции.
горизонтальную скорость спутника;
горизонтальную скорость зоны турбулентности;
разнесение по горизонтали первой и второй антенн;
расстояние от платформы до спутника;
вертикальную скорость платформы;
вертикальную скорость спутника;
вертикальную скорость зоны турбулентности;
и разнесение по вертикали первой и второй антенн.
первую последовательность амплитуд сигнала и вторую последовательность амплитуд сигнала;
вычисленные коэффициенты временной корреляции;
значения корреляционного запаздывания; и
интервал снятия замеров.
указывают на толстую зону турбулентности, если пик кривой временной корреляции относительно широк; и
указывают на тонкую зону турбулентности, если пик кривой временной корреляции относительно узок.
множество антенн, каждая из которых реагирует на падающую электромагнитную энергию с выработкой принятой интерференционной картины, причем электромагнитная энергия распространяется вдоль пути, который подвергается воздействию зоны турбулентности;
приемник, связанный с антеннами и выполненный с возможностью измерения свойств, принятой интерференционной картины; и
логический элемент обработки, связанный с приемником и выполненный с возможностью:
определения значения корреляционного запаздывания при распространении полученной интерференционной картины к первой антенне и второй антенне и при этом зона турбулентности находится на пути сигналов, отправленных со спутника на платформу, причем значение корреляционного запаздывания соответствует временному сдвигу при распространении принятой интерференционной картины относительно первой и второй антенны, вызванному зоной турбулентности; и
вычислении расстояния до зоны турбулентности на основании значения корреляционного запаздывания.
выполнения замеров первой последовательности амплитуд сигнала, соответствующей принятой интерференционной картине, на первой антенне и с интервалом снятия замеров; и
выполнения замеров второй последовательности амплитуд сигнала, соответствующей принятой интерференционной картине, на второй антенне и с интервалом времени снятия замеров.
вычисления коэффициентов временной корреляции между первой и второй последовательностями амплитуд сигнала;
вычисления значений корреляционного запаздывания, соответствующих вычисленным коэффициентам временной корреляции; и
выбора значения корреляционного корреляции, соответствующего наибольшему значению вычисленного коэффициента временной корреляции.
первой и второй последовательности амплитуд сигнала;
вычисленных коэффициентов временной корреляции;
значений корреляционного запаздывания; и
интервала снятия замеров.
выполнения замеров первой последовательности фаз сигнала, соответствующей принятой интерференционной картине, на первой антенне и с интервалом снятия замеров; и
выполняют замеры второй последовательности фаз сигнала, соответствующей принятой интерференционной картине, на второй антенне и с интервалом снятия замеров.
вычисления коэффициентов временной корреляции между первой и второй последовательностями фаз сигнала;
вычисления значений корреляционного запаздывания, соответствующих вычисленным коэффициентам временной корреляции; и
выбора значения корреляционного запаздывания, соответствующего наибольшему значению вычисленного коэффициента временной корреляции.
Комментарии