Конструкция крепления устройства мониторинга периферии транспортного средства - RU2673420C1
Код документа: RU2673420C1
Чертежи



Описание
УРОВЕНЬ ТЕХНИКИ
Область техники
Настоящее описание изобретения относится к конструкции крепления устройства мониторинга периферии транспортного средства.
Предшествующий уровень техники
Из предшествующего уровня техники известна конструкция, в которой для снижения нагрузки на пешехода, полученной при столкновении с транспортным средством, датчик, обнаруживающий объект на периферии транспортного средства (устройство мониторинга периферии транспортного средства), установлен не на элементе каркаса корпуса транспортного средства, а на внутренней поверхности крышки бампера или на фиксаторе бампера, изготовленных из полимерного материала. Следует сослаться, например, на опубликованную японскую патентную заявку №2007-106199.
Однако в данном типе монтажной конструкции существует вероятность того, что, например, даже при незначительном столкновении транспортного средства или при столкновении с областью, отделенной от датчика, происходит отклонение монтажного состояния, например, положения или угла датчика. Кроме того, в этом типе монтажной конструкции для измерения местоположения или угла датчика требуется сконфигурировать, как минимум, внешнюю секцию датчика относительно крышки бампера как съемную конструкцию, и существует вероятность, что будет затронута конструкция транспортного средства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Данное описание содержит конструкцию крепления устройства мониторинга периферии транспортного средства, которое может снижать нагрузку на пешехода, полученную от транспортного средства при столкновении транспортного средства и пешехода, и в котором мала вероятность отклонения местоположения или угла устройства мониторинга периферии транспортного средства.
Первый объект настоящего раскрытия - это конструкция крепления устройства мониторинга периферии транспортного средства, содержащая (i) усилитель переднего бампера, проходящий по ширине транспортного средства и расположенный в торцевой передней секции корпуса транспортного средства, (ii) фару, имеющую корпус лампы, источник света, расположенный внутри корпуса лампы, при этом фара расположена в корпусе транспортного средства выше, чем усилитель переднего бампера, и во внешней крайней секции по направлению по ширине транспортного средства, (iii) компонент транспортного средства, расположенный ниже в корпусе транспортного средства ниже, чем фара, и (iv) устройство мониторинга периферии транспортного средства, расположенное в корпусе транспортного средства ниже, чем нижняя поверхность корпуса лампы, устройство мониторинга периферии транспортного средства отделено первым зазором в направлении по ширине транспортного средства от внешней торцевой поверхности, в направлении по ширине транспортного средства, усилителя переднего бампера и отделено вторым зазором в вертикальном направлении транспортного средства от верхней торцевой поверхности упомянутого компонента транспортного средства, устройство мониторинга периферии транспортного средства обнаруживает объекты спереди и снаружи транспортного средства в направлении по ширине транспортного средства.\
Благодаря вышеуказанному первому объекту, устройство мониторинга периферии транспортного средства, обнаруживающее объекты спереди и снаружи в направлении по ширине транспортного средства, расположено в корпусе транспортного средства ниже, чем нижняя поверхность корпуса лампы, и отделено первым зазором по ширине транспортного средства от внешней торцевой поверхности усилителя переднего бампера и отделено вторым зазором в вертикальном направлении транспортного средства от верхней крайней поверхности упомянутого компонента транспортного средства.
Поэтому даже при столкновении пешехода с передней секцией транспортного средства силе воздействия устройства мониторинга периферии транспортного средства сложно воздействовать на пешехода, и нагрузка на пешехода, полученная от транспортного средства, снижается.
Дополнительно, второй объект настоящего раскрытия - это конструкция крепления устройства мониторинга периферии транспортного средства, согласно вышеописанному первому объекту, в которой угол установки на изображении устройства мониторинга периферии транспортного средства в плане принимается как угол, при котором область обнаружения, в которой обнаруживается объект, не пересекается с областью поворота переднего колеса.
Согласно вышеописанному второму объекту угол установки на изображении устройства мониторинга периферии транспортного средства в плане принимается как угол, при котором область обнаружения, в которой обнаруживается объект, не пересекается с областью поворота переднего колеса. Таким образом, предотвращается ошибочное обнаружение устройством мониторинга периферии транспортного средства переднего колеса как этого объекта.
Третий объект настоящего раскрытия - это конструкция крепления устройства мониторинга периферии транспортного средства согласно вышеописанным первому и второму объектам, в которой устройство мониторинга периферии транспортного средства закреплено на кронштейне, кронштейн подвешивается снизу, в вертикальном направлении относительно транспортного средства, от нижней поверхности корпуса лампы.
Благодаря вышеописанному третьему объекту, так как устройство мониторинга периферии транспортного средства закреплено на кронштейне, свешивающемся с нижней поверхности корпуса лампы, отклонению положения или угла устройства мониторинга периферии транспортного средства сложнее произойти по сравнению с конфигурацией, в которой устройство мониторинга периферии транспортного средства расположено, например, на внутренней поверхности крышки бампера.
Благодаря первому объекту изобретения, может быть снижена нагрузка на пешехода, полученная от транспортного средства при столкновении.
Благодаря второму объекту изобретения, можно предотвратить ошибочное обнаружение устройством мониторинга периферии транспортного средства переднего колеса как этого объекта.
Благодаря третьему объекту изобретения, отклонение положения или угла устройства мониторинга периферии транспортного средства может быть затруднено.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примерный вариант осуществления настоящего изобретения раскрыт подробно на основе следующих фигур:
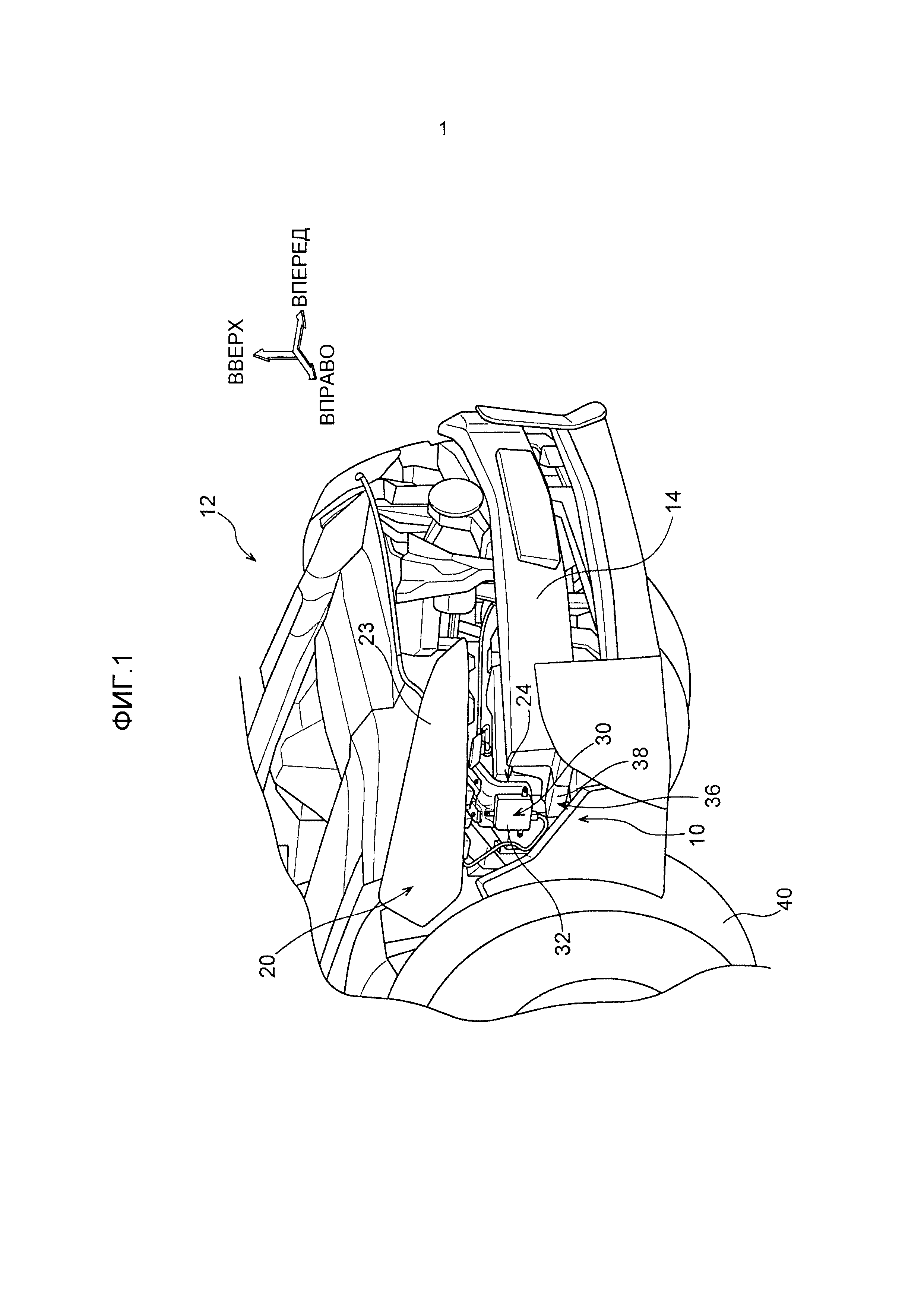
Фиг. 1 - вид в аксонометрии, на котором изображена передняя секция транспортного средства, содержащая монтажную конструкцию согласно настоящему варианту осуществления изобретения;
Фиг. 2 - вид в аксонометрии, на котором изображена увеличенная передняя секция транспортного средства, содержащая монтажную конструкцию, согласно настоящему варианту осуществления изобретения;
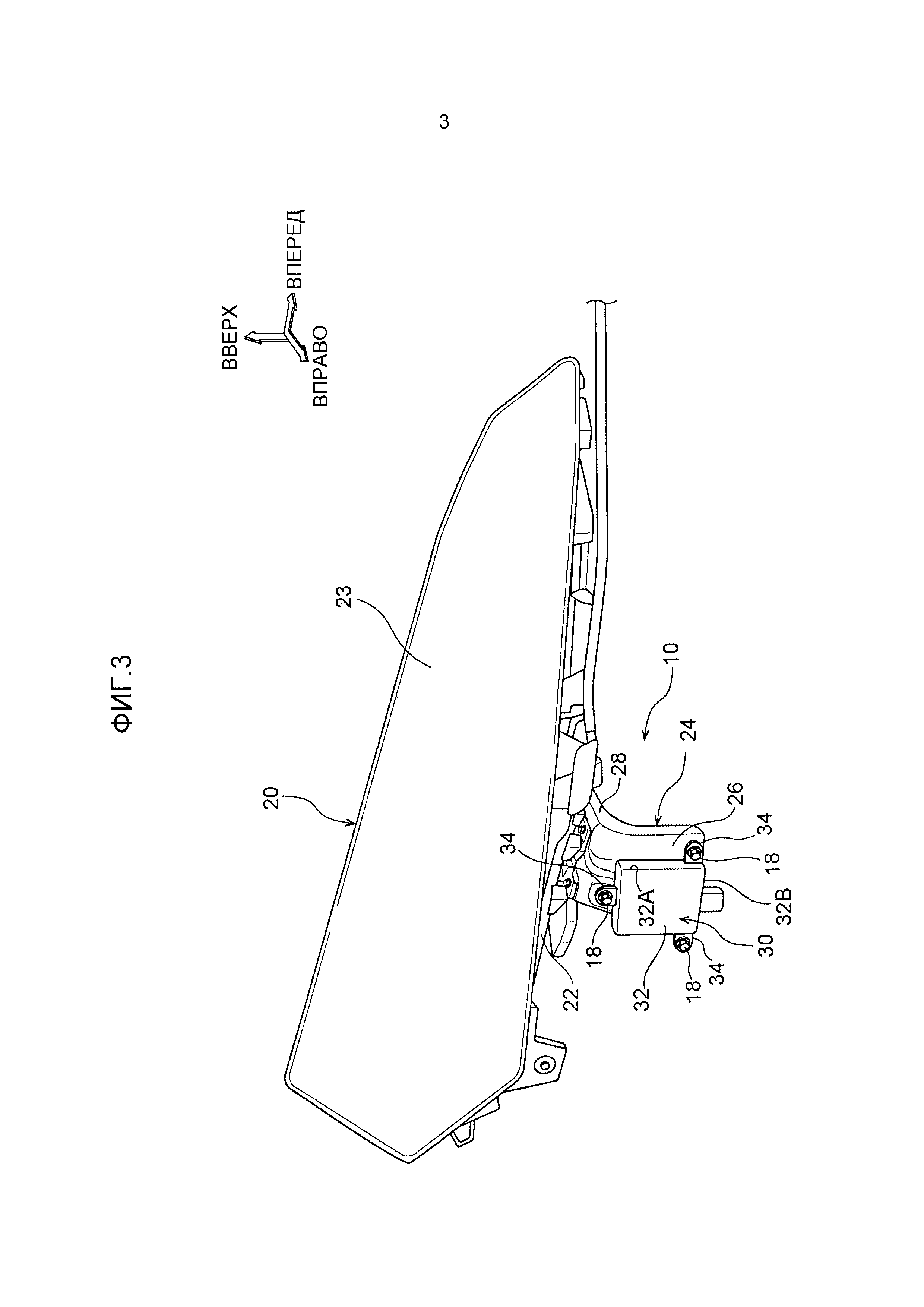
Фиг. 3 - вид в аксонометрии, на котором изображены фара и датчик, образующие монтажную конструкцию, согласно настоящему варианту осуществления изобретения;
Фиг. 4 - вид в плане снизу, на котором изображены фара и датчик, образующий монтажную конструкцию согласно настоящему варианту осуществления изобретения;
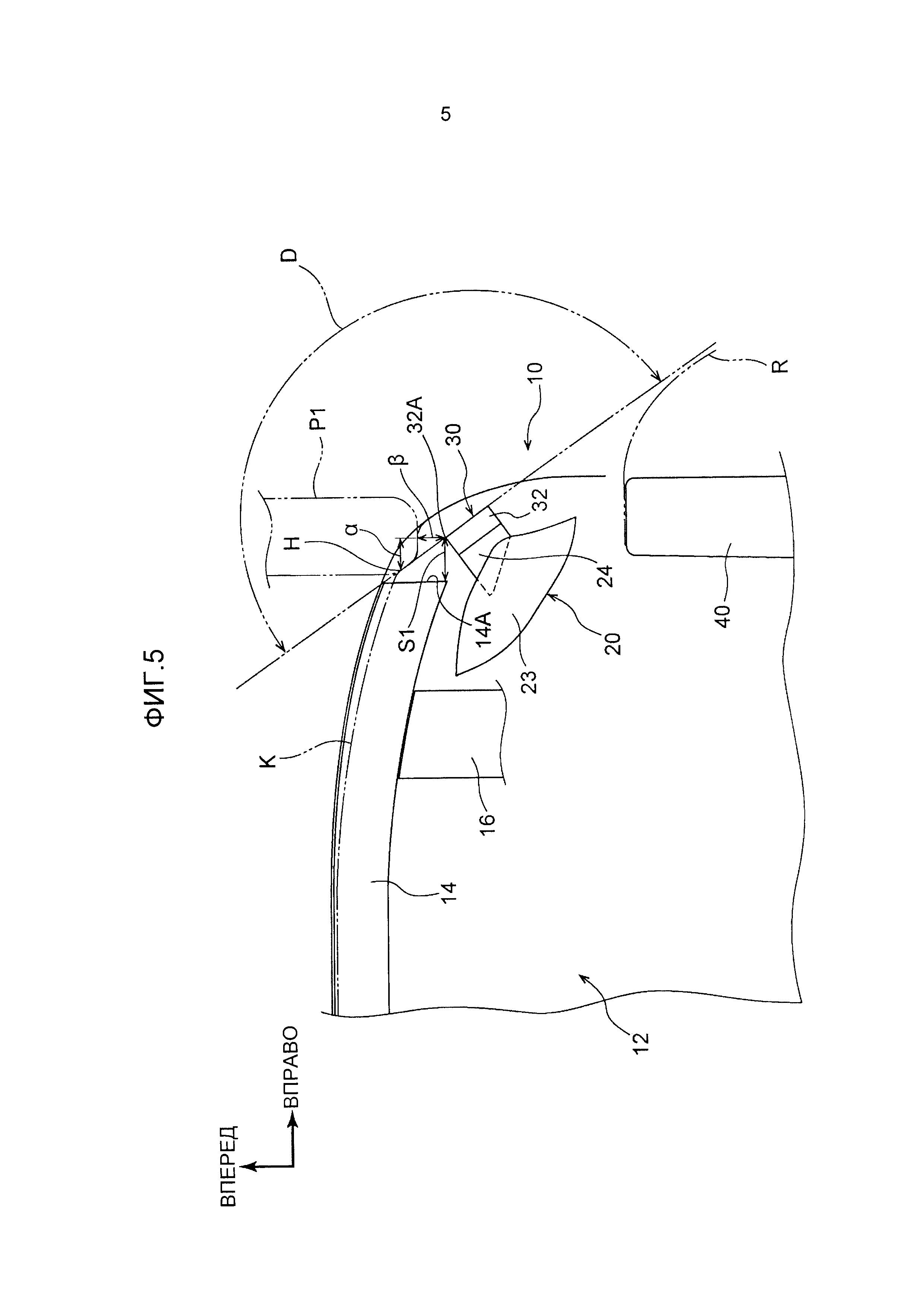
Фиг. 5 - вид в плане, на котором схематически изображена монтажная конструкция согласно настоящему варианту осуществления изобретения;
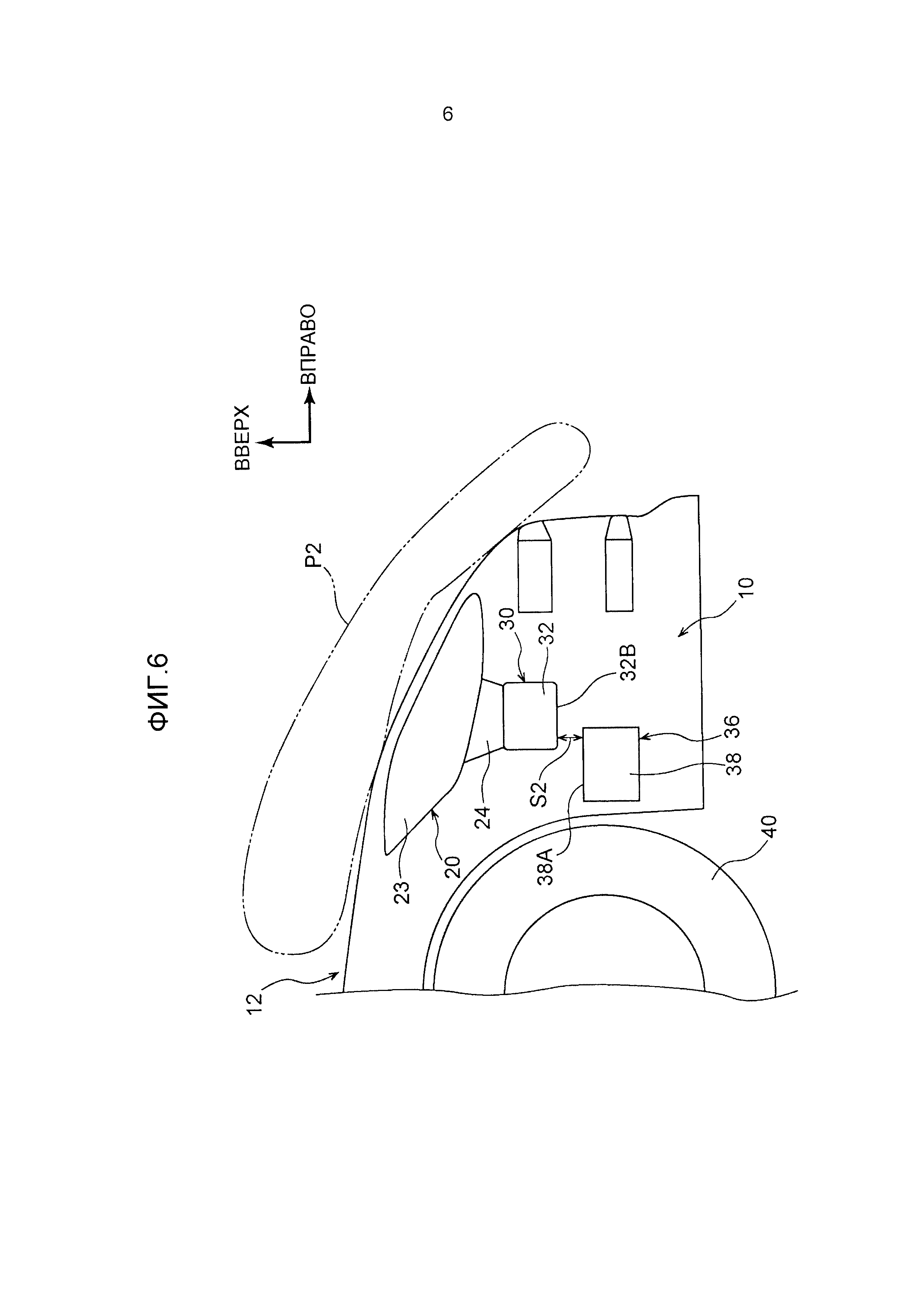
Фиг. 6 - вид сбоку, на котором схематически изображена монтажная конструкция согласно настоящему варианту осуществления изобретения; и
Фиг. 7 - вид в плане, на котором изображено состояние, где датчик транспортного средства, содержащий монтажную конструкцию согласно настоящему варианту осуществления изобретения, определяет транспортное средство, движущееся поперек.
ПОДРОБНОЕ ОПИСАНИЕ
Пример осуществления изобретения согласно настоящему описанию будет подробно раскрыт ниже на основе чертежей. Следует учитывать, что для удобства объяснения стрелка UP, стрелка FR и стрелка RH, обозначенные соответствующим образом на каждом чертеже, обозначают, соответственно, направление вверх относительно транспортного средства, направление вперед относительно транспортного средства и направление вправо относительно транспортного средства. Кроме того, в описании ниже, когда раскрываются направления вверх/вниз, вперед/назад и влево/вправо, подразумевается, что они обозначают верх/низ в вертикальном направлении транспортного средства, вперед/назад в направлении транспортного средства вперед-назад и влево/вправо в направлении транспортного средства влево-вправо (направление по ширине транспортного средства), если не указано иное.
Как показано на Фиг. 1 и 2, монтажная конструкция 10 для датчика 30, служащего в качестве устройства мониторинга периферии транспортного средства, согласно настоящему варианту осуществления, содержит усилитель 14 переднего бампера, изготовленный из металла, проходящий по ширине транспортного средства и расположенный в торцевой передней секции транспортного средства 12. Усилитель 14 переднего бампера установлен посредством деформируемого элемента 16 (см. Фиг. 5) в передних концевых участках пары левых/правых передних элементов (не показаны на иллюстрациях) и имеет прямоугольную замкнутую форму поперечного сечения на изображении в поперечном разрезе, перпендикулярном направлению по ширине транспортного средства.
Кроме того, монтажная конструкция 10 согласно настоящему варианту осуществления изобретения содержит фару 20, расположенную в корпусе транспортного средства выше, чем усилитель 14 переднего бампера, и во внешней крайней секции по направлению по ширине транспортного средства 12. Как показано на Фиг. 3 и 4, фара 20 имеет корпус 22 лампы в форме тубуса из полимерного материала, не показанные на иллюстрации источник света, отражатель, линза и т.д. расположены внутри корпуса 22 лампы.
Дополнительно корпус 22 лампы герметически закрыт и обладает водоотталкивающими свойствами. Кроме того, передняя стенка корпуса 22 лампы выполнена как прозрачная наружная линза 23. В наружной линзе 23 использован полимерный материал, устойчивый к повреждениям, например, растрескиванию, и наружная линза 23 подвергается аналогичной обработке поверхности с функцией поглощения ультрафиолета (устойчивостью к разложению под действием ультрафиолета) или предотвращающей образование царапин.
Данная наружная линза 23 выполнена таким образом, чтобы подвергаться воздействию из пространства, окруженного непоказанными передней крышкой бампера, передним внутренним брызговиком крыла и капотом двигателя в закрытом состоянии, и чтобы передавать свет, сгенерированный источником света, для отражения отражателем и превращения в луч света линзой. Это приводит к конфигурации, где определенная область на корпусе транспортного средства спереди транспортного средства 12 подсвечена.
Кроме того, как показано на Фиг. 1, 2 и 6, монтажная конструкция 10 согласно настоящему варианту осуществления изобретения содержит устройство 36 управления (ЭБУ), служащее в качестве компонента транспортного средства и расположенное в корпусе транспортного средства ниже, чем фара 20 (датчик 30). Устройство 36 управления расположено в корпусе 38 крышки, изготовленном из полимерного материала, выполненном в по существу в форме прямоугольной коробки и имеющем электрическое соединение с датчиком 30 и т.д. Другими словами, предусмотрена конфигурация, где информация, обнаруженная датчиком 30, передается на устройство 36 управления.
Кроме того, как показано на Фиг. 1-6, монтажная конструкция 10 согласно настоящему варианту осуществления изобретения содержит датчик 30, обладающий функцией радара, который обнаруживает объект в большей степени спереди с внешней стороны по ширине транспортного средства 12, чем в области поворота (показано воображаемой линией R на Фиг. 5) переднего колеса 40. Как показано на Фиг. 2-4, датчик 30 расположен в корпусе 32 крышки, изготовленном из полимерного материала, выполненном по существу в форме прямоугольной коробки и расположенном снизу в вертикальном направлении на кронштейне 24 из полимерного материала на нижней поверхности нижней стенки 22А корпуса 22 лампы.
Подробное описание, кронштейн 24 имеет опорную стенку 26 в форме плоской пластины, передняя поверхность которой обращена вперед наружу по ширине транспортного средства, и во внешней периферийной секции опорной стенки 26 проделано несколько (например, три) сквозных отверстий (на черетже не показаны) в определенных местоположениях. Кроме того, суммарно три секции 34 лапок, выступающих вверх к корпусу транспортного средства и наружу и внутрь по ширине транспортного средства, сформированы как одно целое, соответственно, с верхней стенкой и левой и правой боковыми стенками корпуса 32 крышки датчика 30, и на концах каждой секции 34 лапок проделаны сквозные отверстия (на чертеже не показаны).
Таким образом, корпус 32 крышки, содержащий датчик 30, соединен с опорной стенкой 26 кронштейна 24 посредством накладывания на переднюю поверхность опорной стенки 26 таким образом, что каждое сквозное отверстие каждой секции 34 лапок соединено с каждым сквозным отверстием на опорной стенке 26, а также при помощи болтов 18, вставленных в каждое сквозное отверстие в направлении вперед от корпуса транспортного средства и ввинченного в гайку (на чертеже не показана).
Дополнительно, секция 28 в форме плоской пластины, выполненная по существу в форме прямоугольного треугольника на виде в плане снизу на Фиг. 4, сформирована как одно целое с опорной стенкой 26 в верхней торцевой секции кронштейна 24. Другими словами, данный кронштейн 24 имеет по существу форму перевернутой буквы «L» на виде сбоку, и в каждой верхней части (т.е. в трех местах) секции 28 в форме плоской пластины проделаны соответствующие сквозные отверстия (на чертеже не показаны). Кроме того, несколько (три) сквозных отверстий (на чертеже не показаны), соответствующих каждому сквозному отверстию в секции 28 в форме плоской пластины, выполнены по существу в центральной части по ширине транспортного средства в нижней поверхности нижней стенки 22А корпуса 22 лампы.
Таким образом, кронштейн 24 присоединен к нижней поверхности нижней стенки 22А корпуса 22 лампы посредством накладывания по существу на центральную часть по ширине транспортного средства нижней поверхности нижней стенки 22А таким образом, что каждое сквозное отверстие секции 28 в форме плоской пластины соединено с каждым сквозным отверстием в нижней стенке 22А корпуса 22 лампы, а также при помощи болтов 18, вставленныхо в каждое сквозное отверстие в направлении вниз от корпуса транспортного средства и ввинченного в гайку (на чертеже не показана).
Это приводит к конфигурации, в которой датчик 30 (корпус 32 крышки) предусмотрен вниз по вертикали на кронштейне 24 на нижней поверхности нижней стенки 22А корпуса 22 лампы, отделен зазором S1 (см. Фиг. 2 и 5) по ширине транспортного средства от внешней торцевой поверхности 14А усилителя 14 переднего бампера и отделен зазором S2 (см. Фиг. 2 и 6) в направлении по вертикали относительно транспортного средства от верхней торцевой поверхности 38А (далее - верхняя поверхность) корпуса 38 крышки устройства 36 управления.
Следует учитывать, что монтажное положение датчика 30, т.е. способ определения зазоров S1, S2 и т.д. будет подробно раскрыт ниже. Кроме того, нижняя концевая секция кронштейна 24, на которой закреплен датчик 30 (корпус 32 крышки), выполнена как свободная кромка и не предназначена для соединения с другим компонентом транспортного средства (не показанным на чертеже) и т.п.
Дополнительно, как показано на Фиг. 5, данный датчик 30 расположен наискосок к продольному (вперед-назад) направлению корпуса транспортного средства (чтобы быть направленным вперед к внешней стороне по ширине транспортного средства) на виде в плане, и угол его установки относительно продольного направления транспортного средства и направления по ширине транспортного средства на виде в плане рассматривается как угол, при котором область обнаружения (показанная воображаемой линией D на Фиг. 5), в которой обнаруживается объект, не пересекается (не накладывается) с областью поворота (воображаемая линия R) переднего колеса 40.
Кроме того, данный датчик 30 имеет область обнаружения, благодаря которой возможно, как показано, например, на Фиг. 7, в случаях, когда ваше транспортное средство 12 и пересекающееся транспортное средство 13 другого лица совместно въезжают на перекресток, в частности, в случае, когда пересекающееся транспортное средство 13 приближается справа (или слева) от транспортного средства 12, за рулем которого находитесь вы, обнаруживается передняя секция пересекающегося транспортного средства 13, отдаленная как минимум на расстояние L в 30 м от внешней крайней секции 12А передней секции по ширине транспортного средства 12 на виде в плане.
Следует учитывать, что «расстояние L в 30 м» относится к расстоянию, рассчитанному согласно тому факту, что для того, чтобы транспортное средство 12 обнаружило пересекающееся транспортное средство 13 за две секунды до столкновения, когда скорость транспортного средства 12 составляет, например, от 30 км/ч до 60 км/ч, что является ограничением скорости в черте города, пересекающееся транспортное средство 13 должен быть отделено расстоянием от 17 до 33 м от транспортного средства 12.
Далее будет описан способ определения положения для установки (зазоры S1, S2 и т.д.) датчика 30 снизу по вертикали при помощи кронштейна 24 на корпусе 22 лампы. Данное монтажное положение датчика 30 определяется на основе нормативных испытаний. «Нормативные испытания» в данном варианте осуществления изобретения - это испытания, описанные в технических стандартах и регламентах TCP (GTR) №9 БЕЗОПАСНОСТЬ ПЕШЕХОДОВ (существующих в международном регистре с 12 ноября 2008 г.).
Сначала будет раскрыт способ определения положения по ширине транспортного средства (зазор S1) и положения в продольном направлении корпуса транспортного средства относительно усилителя 14 переднего бампера датчика 30. Воображаемой линией Р1 на Фиг. 5 обозначен модельный элемент, имитирующий ногу пешехода. Положение и степень входа в корпус транспортного средства в направлении назад, когда нога пешехода столкнулась снаружи, по ширине транспортного средства, дальше, чем внешняя крайняя секция усилителя 14 переднего бампера, для области входа пешехода относительно транспортного средства 12 показано воображаемой линией К на Фиг. 5, получены на основе условий вышеуказанных нормативных испытаний для каждого типа транспортного средства..
В настоящем варианте осуществления изобретения монтажное положение датчика 30 определяется на основании этих положения и степени входа. В частности, для того, чтобы на виде в плане внутренняя передняя торцевая секция 32А, в направлении по ширине транспортного средства, корпуса 32 крышки датчика 30 была дальше в направлении наружу по ширине транспортного средства на величину определенного зазора α, чем входное положение ноги пешехода относительно передней секции транспортного средства 12, т.е. фактическое местоположение Н точки удара, внутренняя передняя торцевая секция 32А датчика 30 находится в местоположении, отделенном зазором S1 (размером не менее зазора α) от внешней торцевой поверхности 14А, в направлении по ширине транспортного средства, усилителя 14 переднего бампера, и находится в местоположении, более дальнем по направлению назад корпуса транспортного средства на величину определенного зазора β, чем вышеописанная степень входа. Следует учитывать, что зазоры α, β принимаются равными, например, приблизительно 20 мм.
Далее будет описан способ определения местоположения датчика 30 в вертикальном направлении корпуса транспортного средства (зазор S2). Воображаемой линией Р2 на Фиг. 6 обозначен модельный элемент, имитирующий пешехода. В случае, как показано на Фиг. 6, когда пешеход столкнулся с транспортным средством 12 и проехал на верхней поверхности передней секции (капот двигателя или передний внутренний брызговик крыла) транспортного средства 12, передняя секция 12 вжимается вниз в корпус транспортного средства под весом пешехода, и степень вжатия вниз в корпус транспортного средства получают на основе условий вышеописанных нормативных испытаний для каждого типа транспортного средства.
В настоящем варианте осуществления изобретения монтажное положение датчика 30 определяется со ссылкой на степень вжатия. В частности, нижняя поверхность 32 В корпуса 32 крышки датчика 30 расположена в корпусе транспортного средства выше, чем верхняя поверхность 38А корпуса 38 крышки устройства 36 управления, на величину зазора S2, что немного больше, чем вышеописанная степень вжатия от пешехода относительно передней секции транспортного средства 12. Другими словами, устройство 36 управления (корпус 38 крышки) присоединено к транспортному средству 12 таким образом, что зазор S2 отделяет нижнюю поверхность 32В корпуса 32 крышки от верхней поверхности 38А корпуса 38 крышки.
Далее будет описана работа конструкции 10 крепления датчика 30 согласно настоящему варианту осуществления изобретения, выполненному в соответствии с описанным выше.
Как описано выше, датчик 30 установлен по вертикали снизу при помощи кронштейна 24 на нижней поверхности нижней стенки 22А корпуса 22 лампы, образующего фару 20. Кроме того, данный датчик 30 расположен наискосок к продольному (вперед-назад) направлению корпуса транспортного средства (чтобы быть направленным вперед к внешней стороне в направлении по ширине транспортного средства) на виде в плане, и угол его установки рассматривается как угол, при котором область обнаружения (воображаемая линия D), в которой обнаруживается объект, не пересекается с областью поворота (воображаемая линия R) переднего колеса 40.
Таким образом, предотвращается негативное влияние переднего колеса 40 на обнаружение датчиком 30. Например, предотвращается ошибочное обнаружение датчиком 30 переднего колеса 40 как этого объекта. Дополнительно, как показано на Фиг. 7, в случае обнаружения пересекающего транспортного средства 13 на перекрестке, в частности, даже в случае перекрестка с ограждающим объектом, например, стеной W в положении, отдаленным на 1 м по ширине транспортного средства от транспортного средства 12 и при плохой видимости, пересекающее транспортное средство 13 может быть обнаружен датчиком 30. Кроме того, даже при движении транспортного средства 12 датчиком 30 может быть обнаружено транспортное средство, движущийся рядом, следовательно, оказывается содействие изменению полосы.
В этой связи, передний датчик (на чертеже не показан), установленный ближе к центру, в направлении по ширине транспортного средства, передней секции транспортного средства 12 для обнаружения объектов спереди транспортного средства 12, управляемого вами, преимущественно предшествующего транспортного средства, известен в качестве предыдущего уровня техники. Однако при попытке достижения более точного обнаружения в автоматически едущем транспортном средстве обнаружение объектов спереди транспортного средства 12 нельзя назвать достаточным.
В настоящем варианте осуществления изобретения датчик 30 расположен таким образом, чтобы иметь область обнаружения, не пересекающуюся с областью поворота переднего колеса 40, следовательно, возможно точное обнаружение слева и справа от центральной секции в направлении по ширине транспортного средства 12 и, кроме того, обнаружение пересекающего транспортного средства 13 или транспортного средства, движущегося рядом, при смене полосы движения. Другими словами, настоящий вариант осуществления изобретения делает возможным достижение более точного обнаружения в автоматически едущем транспортном средстве, а также конструирование элементов превентивной системы защиты, способной обрабатывать множество обстоятельств во время движения транспортного средства 12.
Кроме того, как описано выше, нижняя кромка секции кронштейна 24, к которой прикреплен датчик 30 (корпус 32 крышки), выполнена как свободная кромка, и нижняя поверхность 32В корпуса 32 крышки датчика 30 расположена таким образом, чтобы быть отделенной зазором S2 в вертикальном направлении корпуса транспортного средства от верхней поверхности 38А корпуса 38 крышки устройства 36 управления.
Таким образом, даже если пешеход сталкивается с передней секцией транспортного средства 12 и, как показано на Фиг. 6, проезжает на передней секции транспортного средства 12, вследствие чего фара 20 движется (или вжимается) в корпусе транспортного средства вниз, датчик 30 (корпус 32 крышки) может двигаться вниз в корпусе транспортного средства вместе с кронштейном 24, следовательно, сила воздействия (нагрузка) датчика 30 (корпуса 32 крышки) не действует на пешехода. Следовательно, может быть снижена степень травмирования пешехода.
Дополнительно, как показано на Фиг. 5, датчик 30 имеет внутреннюю переднюю торцевую секцию 32А, в направлении по ширине транспортного средства, корпуса 32 крышки датчика 30, расположенную таким образом, что она отделена зазором S1, в направлении по ширине транспортного средства, от внешней торцевой поверхности 14А, в направлении по ширине транспортного средства, усилителя 14 переднего бампера. Кроме того, дополнительно данный датчик 30 (корпус 32 крышки) расположен дальше в продольном направлении корпуса транспортного средства, чем степень входа в направлении назад корпуса транспортного средства ноги пешехода, полученная на основе условий раскрытых выше нормативных испытаний.
Таким образом, даже если нога пешехода сталкивается с передней секцией транспортного средства 12 дальше в направлении наружу по ширине транспортного средства, чем внешняя крайняя секция по ширине транспортного средства усилителя 14 переднего бампера, крышка переднего бампера предотвращает или сдерживает столкновение ноги пешехода с датчиком 30 (корпус 32 крышки). В результате, датчик 30 (корпус 32 крышки) может сдержать или предотвратить воздействие силы противодействия (нагрузки) на пешехода, и может быть снижена степень травмирования пешехода.
Кроме того, кронштейн 24, на котором закреплен датчик 30 (корпус 32 крышки), и корпус 22 лампы изготовлены из полимерного материала, следовательно, даже если предположить, что нога пешехода столкнется с датчиком 30 (корпус 32 крышки) через крышку переднего бампера, секция 28 плоской пластины кронштейна 24 может быть отломлена (разделена посредством растрескивания) от корпуса 22 лампы в связи с нагрузкой столкновения. Следовательно, в этом случае датчик 30 (корпус 32 крышки) может сдержать или предотвратить воздействие силы противодействия (нагрузки) на пешехода, и может быть снижена степень травмирования пешехода.
Дополнительно, этот датчик 30 (корпус 32 крышки) расположен по вертикали снизу на нижней поверхности нижней стенки 22А корпуса 22 лампы, образующего фару 20, и не расположен на внутренней поверхности крышки переднего бампера или на фиксаторе переднего бампера (на чертеже не показан), следовательно, даже когда, например, препятствие незначительно сталкивается с крышкой переднего бампера, отсутствует риск отклонения положения или угла датчика 30 (отклонению положения или угла датчика 30 сложно произойти).
Кроме того, как показано на Фиг. 1, так как датчик можно увидеть, если крышка переднего бампера удалена (так как можно удалить только крышку переднего бампера с транспортного средства 12 в состоянии, когда датчик 30 установлен в транспортном средстве 12), отсутствует необходимость изменять конструкцию крышки переднего бампера для измерения положения установки (положения или угла) датчика 30. Другими словами, настоящий вариант осуществления изобретения позволяет измерить положение или угол датчика 30, не затрагивая конструкцию транспортного средства 12.
Конструкция 10 крепления устройства мониторинга периферии транспортного средства (датчик 30) согласно настоящему варианту осуществления изобретения была раскрыта выше на основе чертежей. Однако конструкция 10 крепления устройства мониторинга периферии транспортного средства согласно настоящему варианту осуществления изобретения не ограничивается тем, что изображено на чертежах, и может быть соответствующим образом изменена в диапазоне, не отступающем от сути настоящего описания изобретения.
Например, кронштейн 24, на котором закреплен датчик 30 (корпус 32 крышки), может быть изготовлен не только из полимерного материала, но также из металла, например, листового металла. Кроме того, компонент транспортного средства, расположенный в корпусе транспортного средства ниже, чем фара 20 (датчик 30), не ограничен устройством 36 управления.
Дополнительно, датчик 30 может иметь конфигурацию, в которой верхняя торцевая секция корпуса 32 крышки, содержащая датчик 30, присоединена непосредственно к нижней поверхности нижней стенки 22А корпуса 22 лампы, образующего фару 20, без посредничества кронштейна 24. Кроме того, средства присоединения датчика 30 (корпус 32 крышки) к поддерживающей стенке 26 кронштейна 24 или средства присоединения кронштейна 24 (секция 28 плоской пластины) к нижней стенке 22А корпуса 22 лампы не ограничены креплением болтом и гайкой.
Реферат
Предлагается конструкция крепления устройства мониторинга периферии транспортного средства, конструкция содержит (i) усилитель переднего бампера транспортного средства, (ii) фару с корпусом лампы, при этом фара расположена в корпусе транспортного средства выше, чем усилитель переднего бампера, и во внешней крайней секции по ширине транспортного средства, (iii) компонент транспортного средства, расположенный в корпусе транспортного средства ниже, чем фара, и (iv) устройство мониторинга периферии транспортного средства, при этом устройство мониторинга периферии транспортного средства расположено в корпусе транспортного средства ниже, чем нижняя поверхность корпуса лампы, устройство мониторинга периферии транспортного средства горизонтально отделено первым зазором от внешней торцевой поверхности по ширине транспортного средства усилителя переднего бампера и отделено вторым зазором в вертикальном направлении транспортного средства от верхней торцевой поверхности упомянутого компонента транспортного средства. Устройство мониторинга периферии транспортного средства обнаруживает объекты спереди и снаружи транспортного средства в направлении по ширине транспортного средства. Обеспечивается снижение нагрузки на пешехода, полученной от транспортного средства при их столкновении. 2 з.п. ф-лы, 7 ил.
Комментарии