Способ и система связи между беспроводными устройствами - RU2531355C2
Код документа: RU2531355C2
Чертежи





Описание
Перекрестная ссылка на родственные заявки
Настоящая заявка заявляет преимущество по предварительной заявке на патент США № 61/092717, поданной 28 августа 2008 года, полное раскрытие которой заключено в данном документе по ссылке.
Область техники, к которой относится изобретение
Варианты осуществления в данном документе относятся к области медицинских устройств, а более конкретно к связи между устройствами наблюдения и приемниками.
Уровень техники
Существующие медицинские устройства наблюдения, такие как приборы для постоянного наблюдения уровня глюкозы в крови, позволяют пациентам следить за состоянием здоровья на регулярной и постоянной основе. Например, прибор для постоянного наблюдения уровня глюкозы в крови, носимый близко к телу пациента и имеющий датчики, проникающие через кожу, может осуществлять выборку данных об уровне глюкозы в крови с постоянной частотой и предоставлять эти данные системе создания отчетов/наблюдения, чтобы наблюдать за пациентом. Постоянный характер выборки данных предоставляет пациентам лучшее, более детализированное понимание их состояния и того, как оно изменяется час за часом, или даже минута за минутой.
В некоторых существующих устройствах, для того чтобы предоставить пациенту повышенную простоту использования и комфорт, используется система наблюдения из двух частей. Эта система позволяет помещать относительно небольшое устройство для сбора данных близко к телу и в контакте с пациентом. Устройство для сбора данных затем беспроводным образом передает свои данные выборки отдельному устройству наблюдения, такому как карманное устройство. Это устройство наблюдения предоставляет простой доступ к данным, полученным устройством для сбора данных, и может также предоставлять возможность управлять работой устройства для сбора данных. Использование двух устройств может предоставлять более простое использование, чем непосредственное манипулирование устройством для сбора данных, поскольку оно может быть неудобно расположено на теле или установлено под одеждой.
Краткое описание чертежей
Варианты осуществления будут легко понятны при помощи последующего подробного описания вместе с сопровождающими чертежами. Варианты осуществления иллюстрируются в качестве примера, а не в качестве ограничения, на сопровождающих чертежах.
Фиг.1 - это блок-схема, иллюстрирующая компоненты, используемые в соответствии с различными вариантами осуществления.
Фиг.2 - это блок-схема последовательности операций, иллюстрирующая процесс работы устройства с помощью выделенной командной частоты в соответствии с различными вариантами осуществления.
Фиг.3 - это блок-схема последовательности операций, иллюстрирующая процесс работы устройства в командном режиме в соответствии с различными вариантами осуществления.
Фиг.4 - это блок-схема последовательности операций, иллюстрирующая процесс работы устройства в командном режиме, чтобы повторно захватывать линию связи между устройствами в соответствии с различными вариантами осуществления.
Фиг.5 - это блок-схема последовательности операций, иллюстрирующая процесс работы устройства в режиме полета в соответствии с различными вариантами осуществления.
Фиг.6 - это блок-схема последовательности операций, иллюстрирующая процесс связи устройства наблюдения с устройством для сбора данных в соответствии с различными вариантами осуществления.
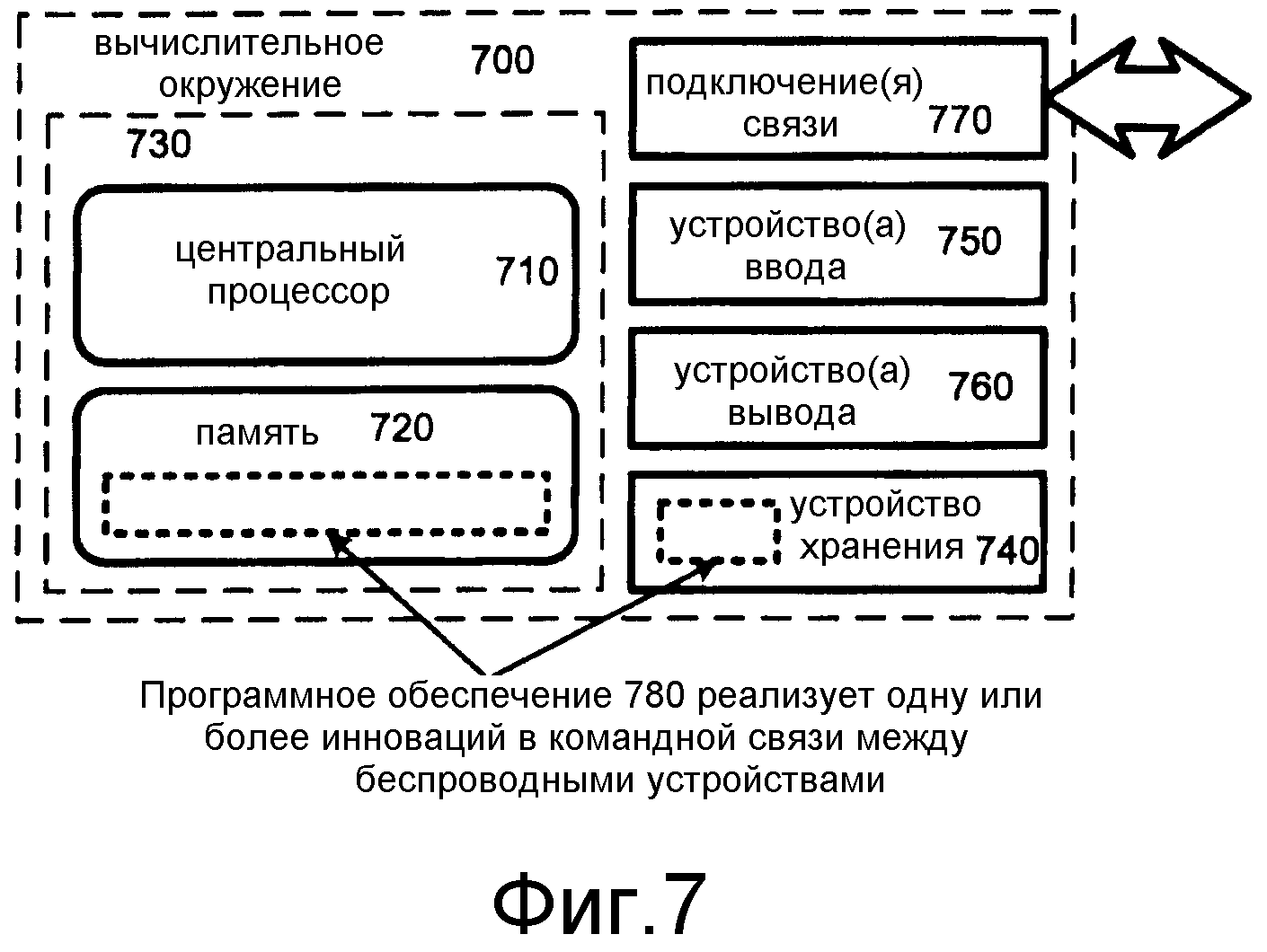
Фиг.7 - это блок-схема, иллюстрирующая вычислительное окружение для использования на практике различных вариантов осуществления.
Подробное описание раскрытых вариантов осуществления
В последующем подробном описании сделана ссылка на сопровождающие чертежи, которые формируют часть данного документа и на которых показаны посредством иллюстраций варианты осуществления, которые могут быть применены на практике. Следует понимать, что могут быть реализованы другие варианты осуществления, и структурные или логические изменения могут быть внесены без отступления от объема настоящего изобретения. Последующее подробное описание, поэтому, не должно восприниматься в ограничивающем смысле, и объем вариантов осуществления задан приложенной формулой изобретения и ее эквивалентами.
Различные операции могут быть описаны как множество отдельных операций по очереди способом, который может быть удобен в понимании вариантов осуществления; однако порядок описания не должен истолковываться как подразумевающий то, что эти операции зависят от последовательности.
Описание может использовать основанные на перспективе описания, такие как вверх/вниз, сзади/спереди и верх/низ. Такие описания используются просто, чтобы упростить обсуждение, и не предназначены для того, чтобы ограничивать применение раскрытых вариантов осуществления.
Могут быть использованы термины "соединенный" и "подключенный" вместе со своими производными. Следует понимать, что эти термины не служат в качестве синонимов друг для друга. Скорее, в конкретных вариантах осуществления термин "подключенный" может использоваться, чтобы указывать, что два или более элементов находятся в непосредственном физическом или электрическом контакте друг с другом. Термин "соединенный" может означать, что два или более элементов находятся в непосредственном физическом или электрическом контакте. Однако термин "соединенный" может также означать, что два или более элементов не находятся в непосредственном контакте друг с другом, но все еще совместно работают или взаимодействуют друг с другом.
В целях описания фраза в форме "A/B" или в форме "A и/или B" означает (A), (B) или (A и B). В целях описания фраза в форме "по меньшей мере, один из A, B и C" означает (A), (B), (C), (A и B), (A и C), (B и C) или (A, B и C). В целях описания фраза в форме "(A)B" означает (B) или (AB), т.е. A является необязательным элементом.
Описание может использовать выражения "вариант осуществления", "варианты осуществления" или "реализация(и)", каждое из которых может ссылаться на один или более из одинаковых или разных вариантов осуществления/реализаций. Кроме того, выражения "содержащий", "включающий в себя", "имеющий" и т.п., когда используются относительно вариантов осуществления, являются синонимами.
В различных вариантах осуществления предоставляются способы, устройства и системы для передачи команд между беспроводными устройствами. В примерных вариантах осуществления вычислительное устройство может быть снабжено одним или более компонентами раскрытых устройств и/или систем и может применяться, чтобы выполнять один или более способов, которые раскрыты в данном документе.
Варианты осуществления в данном документе предоставляют в системе, в которой связь между двумя беспроводными устройствами подразумевает скачкообразное изменение частот, использование выделенной командной частоты для передачи и приема инструкций, не содержащих данные. Устройства используют выделенную частоту для захвата и парного соединения устройств друг с другом. Устройства также используют протоколы, которые периодически прослушивают активность на частоте для того, чтобы идентифицировать команды, которые отправляются между устройством наблюдения и устройством для сбора данных.
Устройства также используют выделенную частоту для работы в режиме полета, когда устройство для сбора данных понижает мощность в своем радиочастотном механизме или даже выключает радиочастотный механизм. Это используется во время воздушного путешествия и, в частности, в коммерческом самолете, где правила запрещают или ограничивают использование электронных устройств, которые передают по радиочастотам, пока самолет с пользователем находится в воздухе. Устройство для сбора данных в этом случае может прослушивать инструкции о завершении режима полета, проверяя выделенный командный канал. Также, когда связь прерывается, или когда по некоторой другой причине устройство для сбора данных не приняло подтверждение своих передач данных в течение периода времени, устройство для сбора данных имеет возможность переходить в тихий режим. В этом режиме устройство сохраняет данные своей выборки и прослушивает инструкцию повторного парного соединения от устройства наблюдения.
I. Система
Фиг.1 иллюстрирует блок-схему модулей, компонентов и связей между устройством для сбора данных и устройством наблюдения. В проиллюстрированном примере устройство для сбора данных является модулем 100 датчика уровня глюкозы ("GSA"), который находится на связи с блоком 120 автоматической калибровки и наблюдения ("ACMU"). Хотя фиг.1 иллюстрирует эти конкретные примеры систем, использующих технологии связи, описанные в данном документе, в альтернативных реализациях технологии могут быть использованы на других медицинских устройствах или между немедицинскими беспроводными устройствами.
GSA 100 содержит две части: модуль 105 датчика разового измерения ("DSA") и модуль 110 датчика многократного использования ("RSA"). DSA 105 предоставляет измерение данных о здоровье пациента, в этом случае DSA непосредственно измеряет уровни глюкозы в крови через датчик, проходящий через кожу пациента или расположенный в теле пациента. RSA 110, который сам необязательно должен находиться в близком контакте с телом пациента, служит для того, чтобы затем получать выборки данных, предоставляемые посредством DSA 105, и записывать и/или передавать эти выборки по необходимости. Для этого RSA 110 содержит цифровой механизм 130, который содержит процессор и программируется для проведения общих операций RSA, а также радиочастотный механизм 140 RSA, который руководит радиочастотной связью между GSA 100 и ACMU 120. В одной реализации RF-механизм 140 RSA содержит объединенный RF-приемопередатчик CC2510 фирмы Texas Instruments и интегральную схему микроконтроллера, хотя другие реализации могут использовать альтернативные процессоры.
ACMU 120 является устройством для приема и наблюдения данных от GSA 100, а также для предоставления команд управления в GSA 100. Аналогично RSA-части 110 GSA 100, ACMU 120 содержит цифровой механизм 150 и радиочастотный механизм 160. Как и в RSA 110, цифровой механизм 150 предоставляет высокоуровневые операции ACMU 120, в то время как RF-механизм 160 ACMU предоставляет связь с RSA 110. ACMU также содержит пользовательский интерфейс 165 для управления своей работой, а также работой ассоциированного RSA.
Как иллюстрирует фиг.1, RF-механизм 140 RSA и RF-механизм 160 ACMU связываются через множество частот. В типичной реализации два RF-механизма, под управлением своих соответствующих цифровых механизмов, используют протокол скачкообразного изменения частоты. В этом протоколе RF-механизмы проходят, с регулярными интервалами, по предварительно определенной последовательности радиочастот для передачи данных (или "каналов") 170 для своих передающих и принимающих связей. Поскольку RF-механизмы относительно синхронизированы друг с другом, они имеют возможность связываться по каналам, даже когда они изменяются. Хотя фиг.1 иллюстрирует пример трех каналов, это сделано в иллюстративных целях и не должно считаться как ограничение числа или выбора каналов, используемых в методиках данного документа. В одной реализации частоты для последовательности частот 170 могут выбираться из диапазона частот между 2400 МГц и 2480 МГц, хотя в других реализациях могут быть использованы другие варианты частот.
Фиг.1 также иллюстрирует использование командной частоты 180, которая является отдельной от частот 170 для передачи данных. Эта частота, которая типично выбирается как не находящаяся в последовательности частот 170 для передачи данных, используется посредством RSA 110 и ACMU 120 для того, чтобы связываться по выделенному каналу. В частности, этот командный канал используется для передачи инструкций, не содержащих данные, или команд от ACMU 120 к RSA 110, а также для подтверждений приема от RSA. В одной реализации эта командная частота равна 2474 МГц, но также могут быть использованы другие частоты.
Это предоставляет преимущество над методиками, которые используют только каналы из последовательности скачкообразного изменения частот для всех связей, поскольку устройства могут использовать выделенную командную частоту для сообщений, не содержащих данные. Однако преимущества использования скачкообразного изменения частоты для традиционной передачи выборок данных сохраняются.
II. Методики связи
Фиг.2 иллюстрирует блок-схему последовательности операций примерной методики 200 для использования выделенной командной частоты для связи между двумя беспроводными устройствами. Процесс на фиг.2 может выполняться либо посредством RSA 110, либо ACMU 120, чтобы связываться с другим устройством. Для иллюстрации процесс на фиг.2 будет описан со ссылкой на RSA 110. Процесс начинается на этапе 210, где RSA 110 передает данные на одной из частот 170 для передачи данных. Далее, на этапе 215 принятия решения RSA 110 определяет, нужно ли прослушивать командные инструкции. Альтернативно, в случае, когда процесс на фиг.2 выполняется посредством ACMU 120, ACMU будет определять на этапе 215, необходимо ли выдавать командную инструкцию. Если нет необходимости в командной инструкции, на этапе 220 RSA 110 выбирает следующую частоту для передачи данных из последовательности частот 170 и затем продолжает передавать данные на этапе 210. Этот циклический процесс, когда выполняется посредством RSA 110 и ACMU 120, выполняет технологию скачкообразного изменения частоты, описанную выше.
RSA 110 может решить, однако, что существует необходимость в командной инструкции, на этапе 215 принятия решения. Как описано в примерах ниже, это может случиться, когда подтверждения приема не принимались от ACMU в течение долгого времени, когда RSA был перезапущен, или просто потому, что RSA регулярно прослушивает команды от ACMU в течение ограниченного периода времени. Альтернативно, решение может не быть принято посредством RSA 110, а вместо этого прерывание или другой триггер может указывать RSA 110, что RSA 110 должен переключиться на командную частоту, чтобы получить некую инструкцию/команду. Каковы бы ни были причины, процесс затем продолжается на этапе 230, где RSA 110 прослушивает и передает на выделенной командной частоте. В одной реализации это выполняется цифровым механизмом 130, инструктирующим RF-механизму 140 переключиться с прослушивания и передачи на одной из частот для передачи данных на прослушивание и передачу по выделенному командному каналу. Дополнительно, количество времени, потраченного на передачу по выделенному командному каналу, может изменяться приблизительно от 10 миллисекунд до нескольких минут в зависимости от природы связи и/или сценария, для которого RF-механизм был инструктирован о переключении.
Наконец, после связи по выделенной командной частоте процесс продолжается на этапе 240, где RSA 110, опять переключая частоту, используемую RF-механизмом 140 RSA, возвращается к первой частоте для передачи данных в последовательности 170. Процесс затем возвращается к этапу 210, где данные передаются, и весь процесс повторяется.
III. Примеры использования командной частоты
Фиг.3 иллюстрирует блок-схему последовательности операций примерной методики 300 работы в командном режиме. Снова для цели иллюстрации процесс на фиг.3 описывается со ссылкой на RSA 110. Процесс начинается на этапе 310, где для RSA 110 выдается указание работать в командном режиме. В типичном варианте RSA может использовать командный режим при включении питания или при перезапуске для того, чтобы он мог найти ACMU для парного соединения. Далее, на этапе 320 RSA определяет, что предварительно установленное количество времени прошло после последнего раза, когда он выполнял прослушивание на командной частоте. Этап может быть пропущен, например, при включении питания или перезапуске. В одной реализации RSA 110 сконфигурирован, чтобы выполнять прослушивание на выделенной командной частоте один раз каждые 60 секунд. RSA может также быть сконфигурирован, чтобы случайно выбирать момент времени в пределах каждых 60 секунд, когда прослушивать командный канал. Таким образом, даже если RSA регулярно выполняет прослушивание каждые 60 секунд, он маловероятно должен прослушивать и, следовательно, отвечать на инструкции в то же время, что и другой соседний RSA. Эта методика уменьшает вероятность помех между двумя соседними RSA, если оба находятся в командном режиме.
После определения того, что пора прослушивать командный канал, на этапе 330 RSA 110 переключается на работу на командной частоте. Как указано выше, это может подразумевать инструктирование RF-механизма RSA о переключении. Затем на этапе 340 RSA прослушивает инструкции на командной частоте. В этом случае, когда прослушивание по командному каналу выполняется регулярно, RSA может прослушивать командный канал только в течение короткого периода времени, например 10 миллисекунд. Будучи открытым даже на короткий период времени, но с регулярным интервалом, ACMU может полагаться на то, что если ему необходимо отправить команду в RSA, RSA будет прослушивать. Таким образом, в одной реализации, когда RSA находится в командном режиме, в то время как ACMU будет принимать подтверждение от RSA, когда RSA принимает команду ACMU, ACMU не знает, когда RSA примет его команды. ACMU, поэтому, повторяет каждую команду, которую он формирует, в течение, по меньшей мере, одного из предварительно установленных количеств времени, используемых RSA (таких как 60 секунд в примере выше). Таким образом, в некоторый момент, во время которого ACMU повторяет свою команду, RSA в диапазоне обслуживания должен выполнять прослушивание и иметь возможность принять команду. Процесс затем продолжается на этапе 350, где RSA переключается обратно на канал передачи данных. Процесс затем повторяется на этапе 320, где RSA ожидает до следующего момента, когда он должен прослушивать инструкцию. В одной реализации (не иллюстрирована), если RSA не принимает команду от ACMU в течение установленного периода времени (например, 30 минут), RSA прекратит работу в командном режиме и, как вариант, перейдет в режим пониженного энергопотребления для того, чтобы экономить ресурсы аккумулятора.
В варианте осуществления ACMU может выдавать две команды, Inquire и Pair, для того, чтобы выполнять парное соединение между ним и RSA. Как обсуждалось выше, ACMU может повторять в течение каждого периода времени, такого как 60 секунд, для того, чтобы команда могла быть услышана одним или более RSA, с которым он связывается или пытается установить парное соединение. Команда Inqire инструктирует каждому RSA, когда этот RSA услышал команду, передавать пакет подтверждения приема, который идентифицирует RSA. Таким образом, после ожидания и приема ответов ACMU может затем формировать (и отображать) список множества GSA для пользователя, чтобы выбирать из него для парного соединения. Команда Pair, которая может быть использована после команды Inquire или может быть использована сама по себе, отправляется как пакет, содержащий идентификационные данные конкретного RSA, и инструктирует RSA о парном соединении с ACMU. ACMU после приема ответа от конкретного RSA, которого он идентифицировал, может затем узнать, соединился ли он парно с RSA, и начать принимать выборки данных, передаваемые от RSA.
Альтернативно, вместо управления сбором от ACMU, RSA может повторно отправлять пакеты данных, которые идентифицируют RSA, в то время как ACMU работает в командном режиме, чтобы принимать эти пакеты. ACMU может затем перечислять доступные GSA пользователю, который может выбирать, с каким GSA установить парное соединение. Парное соединение может затем проводиться согласно известным методикам.
Фиг.4 - это блок-схема последовательности операций, иллюстрирующая примерную методику 400 работы RSA в тихом режиме сбора данных. Процесс на фиг.4 может выполняться в сценарии, где ACMU испытывает трудности с ответом на выборки данных, отправленные посредством RSA, например, сильные помехи или недоступность ACMU. Процесс начинается на этапе 410, где RSA 110 работает в режиме выборки данных. Как описано выше, находясь в этом режиме, RSA может использовать скачкообразное изменение частоты, в то же время передавая свои данные в ACMU. Далее, на этапе 420 RSA определяет, что предварительно установленное время истекло с тех пор, как он принял подтверждение приема пакета данных, который он отправил. В качестве примера, в одной реализации этот период может быть равен 90 минут. После этого времени, если подтверждения приема не были приняты ACMU, RSA переключается в тихий режим выборки данных.
Тихий режим выборки данных используется, когда может предполагаться, что сообщения правильно не принимаются посредством ACMU. Таким образом, в этом режиме RSA будет сохранять выборки данных, а не передавать их, и будет периодически прослушивать инструкции на командной частоте. На этапе 440, затем, RSA сохраняет данные, которые он принял от DSA 105. Далее, на этапе 450 RSA прослушивает инструкции на командной частоте. Точно так же, как и в командном режиме, описанном выше, RSA может прослушивать только в течение коротких периодов времени и с регулярными интервалами. Следовательно, в одной реализации RSA прослушивает на командной частоте один раз каждые 60 секунд в течение 10 миллисекунд. В еще одной реализации, на этапе 450 RSA прослушивает на командной частоте команду, чтобы повторно захватить ACMU. Процесс затем повторяется с этапа 440, где дополнительные выборки данных сохраняются до тех пор, пока RSA не примет команду выхода из тихого режима выборки данных, в этой точке процесс заканчивается (не иллюстрировано).
В альтернативной реализации изменение в тихом режиме выборки данных, описанном выше, может также быть использовано на основе числа неподтвержденных передач данных от RSA. В этом случае RSA может, после неприема подтверждения пакета данных, повторно передавать пакет данных в ACMU и ожидать ответа. Если после двух повторных попыток подтверждение не принято, RSA ненадолго входит в тихий режим выборки данных на 10 миллисекунд, во время которого он прослушивает командную частоту, чтобы определять, отправлена ли команда из ACMU.
Фиг.5 - это блок-схема последовательности операций, иллюстрирующая примерную методику 500 работы RSA в режиме полета. Режим полета обычно выбирается, когда система используется в самолете во время полета, когда ожидается, что традиционная мощность передачи может мешать полетным системам. Работая с пониженной мощностью, или без мощности передачи вовсе, режим полета позволяет GSA 100 продолжать делать выборки уровня глюкозы в крови во время полета и корректно повторно устанавливать парное соединение в конце полета без необходимости непосредственного манипулирования RSA 110. Процесс начинается на этапе 510, где RSA 110 принимает команду, чтобы работать в режиме полета. В то время как это может быть сделано через непосредственную активацию RSA, это менее желательно, чем прием команды от ACMU, например, из-за относительной недоступности RSA. Такая команда может быть отправлена в RSA во время командного режима или может быть включена в подтверждение, отправленное после приема пакета данных, переданного из RSA.
Процесс продолжается на этапе 520, где RSA инструктирует свой RF-механизм понизить его мощность передачи. В одной реализации RF-механизм инструктируется о понижении мощности передачи, чтобы соответствовать правилам FAA для одобренных медицинских персональных электронных устройств, таких как специфицированные в RTCA/DO-160E раздел 21 категория M. ACMU будет сходным образом понижать свою мощность передачи для подтверждающих пакетов.
Далее, на этапе 540 RSA будет прослушивать, например, на командной частоте инструкцию об окончании режима полета. В другой реализации, когда RSA сконфигурирован, чтобы передавать с низкой, но не нулевой, мощностью, RSA может прослушивать инструкцию об окончании, которая вставляется посредством ACMU в пакет подтверждения приема. Процесс затем продолжается на этапе 545, где RSA определяет, принял ли он инструкцию об окончании режима полета. Если нет, процесс повторяется с этапа 530, где отправляются дополнительные передачи данных с низкой мощностью. Если вместо этого была принята инструкция об окончании, процесс тогда заканчивает режим полета.
В другой реализации, не проиллюстрированной, RSA понижает свою мощность передачи полностью до нуля. В этой реализации вместо передачи данных во время режима полета на этапе 530 RSA сохраняет выборки данных в своей внутренней памяти в течение режима полета. Затем, на этапе 540 он периодически прослушивает инструкцию об окончании режима полета на выделенной командной частоте. Как обсуждалось выше, эта инструкция может повторяться в течение периода времени посредством ACMU до тех пор, пока RSA не примет, обработает и подтвердит прием инструкции.
Фиг.6 - это блок-схема последовательности операций, иллюстрирующая примерный процесс 600 связи ACMU с RSA через выделенную командную частоту. Процесс начинается на этапе 610, где ACMU определяет, что требуется управление RSA. Например, ACMU может принимать команду пользователя через пользовательский интерфейс 165 или может определять, что должна быть отправлена команда повторного парного соединения, поскольку связь между двумя устройствами была нарушена.
Далее, на этапе 620 ACMU отправляет команду в RSA на выделенной командной частоте 180. Как описано выше, в одной реализации ACMU будет повторно отправлять команду в течение предварительно определенного периода времени, поскольку он не может предполагать, что RSA прослушивает в первоначальный момент времени, когда команда отправляется; например, ACMU может отправлять инструкцию многократно в течение 60 секунд, так что, по меньшей мере, в один момент в течение 60 секунд RSA будет прослушивать. Далее, на этапах 630 и 640 ACMU ожидает ответа от RSA и принимает подтверждение приема. В другой реализации подтверждение приема может не быть отправлено, а вместо этого ACMU будет предполагать, что инструкция была принята, поскольку она отправлялась в течение достаточно продолжительного периода. Процесс затем заканчивается.
IV. Вычислительное окружение
Фиг.7 иллюстрирует обобщенный пример подходящего вычислительного окружения 700, в котором могут быть реализованы несколько из описанных вариантов осуществления. Вычислительное окружение 700 не предназначено для того, чтобы накладывать какое-либо ограничение на объем использования или функциональность изобретения, поскольку методики и инструментальные средства могут быть реализованы в различных вычислительных окружениях общего или специального назначения, таких как персональные компьютеры, бытовые электронные устройства и т.п.
Обратимся к фиг.7, на которой вычислительное окружение 700 включает в себя, по меньшей мере, один процессор (CPU) 710 и ассоциированную память 720. На фиг.7 эта наиболее базовая конфигурация 730 включена в пределы пунктирной линии. Процессор 710 исполняет машиноисполняемые инструкции и может быть реальным или виртуальным процессором. В многопроцессорной системе несколько процессоров (не иллюстрированы) исполняют машиноисполняемые инструкции, чтобы повышать вычислительную мощность. Памятью 720 может быть энергозависимая память (например, регистры, кэш, RAM), энергонезависимая память (например, ROM, флэш-память и т.д.) или какая-либо их комбинация. Память 720 хранит программное обеспечение 780 для реализации одной или более новых реализаций связи, описанных в данном документе.
Вычислительное окружение может иметь дополнительные признаки. Например, вычислительное окружение 700 включает в себя устройство 740 хранения, одно или более устройств 750 ввода, одно или более устройств 760 вывода и одно или более подключений 770 связи. Механизм взаимного подключения (не показан), такой как шина, контроллер или сеть, взаимно подключает компоненты вычислительного окружения 700. Программное обеспечение операционной системы (не показано) может предоставлять операционное окружение для другого программного обеспечения, исполняемого в вычислительном окружении 700, и координирует действия компонентов вычислительного окружения 700.
Устройство 740 хранения может быть съемным или несъемным и включает в себя магнитные диски, CD-ROM, DVD, флэш-накопители, твердотельные накопители или любой другой носитель, который может быть использован, чтобы хранить информацию, и к которому можно осуществлять доступ в рамках вычислительного окружения 700. Устройство 740 хранения хранит инструкции для программного обеспечения 780.
Устройством(ми) 750 ввода может быть устройство сенсорного ввода, такое как клавиатура, мышь, перо или шаровой манипулятор, устройство голосового ввода, устройство сканирования, сенсорная панель с функцией управления пальцем или стилусом или другое устройство, которое предоставляет ввод в вычислительное окружение 700. Устройством(ми) 760 вывода может быть дисплей (например, LCD, OLED или CRT-монитор, экран дисплея или т.п.), принтер, громкоговоритель, CD- или DVD-устройство записи или другое устройство, которое предоставляет вывод из вычислительного окружения 700.
Подключение(я) 770 связи обеспечивает связь по среде связи с другим вычислительным объектом. Среда связи переносит информацию, такую как машиноисполняемые инструкции, аудио- и видеовходные или выходные данные или другие данные в модулированном сигнале данных. Модулированный сигнал данных - это сигнал, который имеет одну или более характеристик, установленных или изменяемых таким образом, чтобы кодировать информацию в сигнале. В качестве примера, а не ограничения, среда обмена данными включает в себя проводные или беспроводные методики, реализованные с помощью электрического, оптического, радиочастотного, инфракрасного, акустического или другого носителя.
Методики и инструментальные средства могут быть описаны в общем контексте машиночитаемых носителей. Машиночитаемые носители - это любые доступные носители, к которым можно осуществлять доступ в вычислительном окружении. В качестве примера, а не ограничения, с вычислительным окружением 700, машиночитаемые носители включают в себя память 720, машиночитаемые носители 740 хранения (например, CD, DVD, дискеты, флэш-накопители, съемные накопители на жестких дисках, массивы накопителей на жестких дисках и твердотельные накопители) и комбинации любого из вышеуказанного.
Методики и инструментальные средства могут быть описаны в общем контексте машиноисполняемых инструкций, таких как включенные в программные модули, исполняемые в вычислительном окружении в целевом реальном или виртуальном процессоре. В общем, программные модули включают в себя процедуры, программы, библиотеки, объекты, классы, компоненты, структуры данных и т.д., которые выполняют конкретные задачи или реализуют конкретные абстрактные типы данных. Функциональность программных модулей может быть комбинирована или разделена между программными модулями по желанию в различных вариантах осуществления. Машиноисполняемые инструкции для программных модулей могут исполняться в локальном или распределенном вычислительном окружении.
С целью представления подробное описание использует такие термины, как "определить", "вычислить" и "категоризировать", чтобы описывать операции компьютера в вычислительном окружении. Эти термины являются высокоуровневыми абстракциями для операций, выполняемых компьютером, и не должны путаться с действиями, выполняемыми человеком. Фактические операции компьютера, соответствующие этим терминам, различаются в зависимости от реализации.
Хотя в данном документе были проиллюстрированы и описаны конкретные варианты осуществления, специалистам в данной области техники будет понятно, что широкое множество альтернативных и/или эквивалентных вариантов осуществления или реализаций, рассчитанных на достижение одинаковых целей, может заменять показанные и описанные выше варианты осуществления без отступления от объема изобретения. Специалисты в данной области техники легко поймут, что варианты осуществления могут быть реализованы в очень широком множестве путей. Эта заявка подразумевает охват любых адаптаций или изменений вариантов осуществления, обсужденных в данном документе. Следовательно, явно предполагается, что варианты осуществления должны быть ограничены только формулой изобретения и ее эквивалентами.
Реферат
Группа изобретений относится к области медицины, использующей медицинские приборы сбора данных, осуществляющие связь с приемниками, и предназначена для упрощения доступа к данным, полученным прибором сбора данных и осуществления управления работой прибора сбора данных. Описаны системы и методики передачи команд между беспроводными устройствами. В одной реализации устройство для сбора данных (такое как прибор для постоянного наблюдения уровня глюкозы) и устройство наблюдения/управления, которые передают выборки данных посредством протокола скачкообразного изменения частоты, используют выделенную командную частоту для передачи инструкций и подтверждений, не содержащих данные. Описан командный режим, в котором командная частота регулярно прослушивается устройством, чтобы определять, отправляются ли инструкции парного соединения или другие инструкции. В другом примере, когда связь нарушается или искажается, устройства возвращаются к использованию командной частоты для того, чтобы повторно захватывать линию парной связи между устройствами. Командная частота также используется для режима полета, когда устройство для сбора данных переходит в режим с пониженной мощностью или без мощности передачи и остается в этом режиме, сохраняет данные выборки до тех пор, пока не получит инструкцию выйти из режима полета по командной частоте. 6 н. и 20 з.п. ф-лы, 7 ил.
Формула
- передают один или более пакетов данных из устройства для сбора данных в устройство управления, причем передачу выполняют на одной из предварительно определенного числа радиочастот для передачи данных;
- при определении того, что инструкции, не содержащие данные, должны быть приняты устройством для сбора данных, прослушивают инструкции, не содержащие данные, на командной радиочастоте, причем командная радиочастота отличается от радиочастот для передачи данных; и
- связываются с устройством управления на командной радиочастоте;
причем определение того, что инструкции, не содержащие данные, должны быть приняты, содержит этап, на котором определяют, что предварительно определенное количество времени истекло с тех пор, как устройство для сбора данных последний раз прослушивало инструкции, не содержащие данные, на командной радиочастоте.
- передают один или более пакетов данных из устройства для сбора данных в устройство управления, причем передачу выполняют на одной из предварительно определенного числа радиочастот для передачи данных;
- при определении того, что инструкции, не содержащие данные, должны быть приняты устройством для сбора данных, прослушивают инструкции, не содержащие данные, на командной радиочастоте, причем командная радиочастота отличается от радиочастот для передачи данных; и
- связываются с устройством управления на командной радиочастоте;
причем определение того, что инструкции, не содержащие данные, должны быть приняты, содержит этап, на котором определяют, что предварительно определенное число пакетов данных ушло неподтвержденным посредством устройства управления.
- передают один или более пакетов данных из устройства для сбора данных в устройство управления, причем передачу выполняют на одной из предварительно определенного числа радиочастот для передачи данных;
- при определении того, что инструкции, не содержащие данные, должны быть приняты устройством для сбора данных, прослушивают инструкции, не содержащие данные, на командной радиочастоте, причем командная радиочастота отличается от радиочастот для передачи данных; и
- связываются с устройством управления на командной радиочастоте;
причем определение того, что инструкции, не содержащие данные, должны быть приняты, содержит этап, на котором принимают инструкцию работать в режиме полета.
- определяют, что одна или более инструкций должны быть отправлены устройству для сбора данных; и
- передают одну или более инструкций устройству для сбора данных на командной частоте, которая не находится в предварительно определенной последовательности радиочастот для передачи данных; и
- принимают подтверждение приема от устройства для сбора данных на командной частоте, причем:
- определение того, что одна или более инструкций должны быть отправлены устройству для сбора данных, содержит этап, на котором принимают указание о том, что устройство для сбора данных должно работать в режиме полета;
- одна или более инструкций содержат команду для устройства для сбора данных работать в режиме полета; и
- принимают подтверждение приема от устройства для сбора данных, отправленное с низкой мощностью, подходящей для передачи во время полета.
- определяют, что одна или более инструкций должны быть отправлены устройству для сбора данных; и
- передают одну или более инструкций устройству для сбора данных на командной частоте, которая не находится в предварительно определенной последовательности радиочастот для передачи данных; и
- принимают подтверждение приема от устройства для сбора данных на командной частоте, причем:
- определение того, что одна или более инструкций должны быть отправлены устройству для сбора данных, содержит этап, на котором определяют, что устройство для сбора данных должно повторно парно соединиться с устройством управления; и
- одна или более инструкций содержат инструкции повторного парного соединения.
- определение того, что устройство для сбора данных должно повторно парно соединиться с устройством управления, содержит этап, на котором определяют, что данные больше не принимаются от устройства для сбора данных.
- определяют командный пакет, отличный от пакета данных или подтверждения приема пакета данных, который должен быть передан посредством радиочастотного механизма, причем определение команды, отличной от пакета данных или подтверждения приема пакета данных, которая должна быть передана посредством радиочастотного механизма, содержит этап, на котором медицинское устройство наблюдения перезапускают, и командный пакет идентифицирует запрос повторного парного соединения между устройством для сбора данных и приемным устройством; и
- инструктируют радиочастотному механизму передавать командный пакет по предварительно определенному командному каналу, отличному от каналов в наборе каналов для передачи данных.
Документы, цитированные в отчёте о поиске
Беспроводная сенсорная система
Эффективное по мощности планирование каналов в беспроводной сети
Комментарии