Способ управления многофазным синхронным генератором с независимым возбуждением в ветряной турбине - RU2735800C1
Код документа: RU2735800C1
Чертежи




Описание
Настоящее изобретение относится к способу управления многофазным синхронным генератором с независимым возбуждением в ветряной турбине, а также относится к соответствующей ветряной турбине.
Ветряные турбины являются известными и преобразуют энергию ветра в электрическую энергию посредством аэродинамического ротора и электрического генератора, соединенного с ним. Существуют различные конструкции генераторов. В частности, сегодня широко распространены асинхронные машины с двойным питанием, синхронные генераторы с постоянным возбуждением, то есть с постоянными магнитами, и синхронные генераторы с отдельным возбуждением. Настоящее изобретение не относится ни к упомянутым асинхронным машинам двойного питания, ни к цитируемым синхронным генераторам с постоянным возбуждением, а скорее относится к синхронным генераторам с независимым возбуждением.
Отличие от асинхронных машин двойного питания широко варьируется, что означает, что асинхронные машины двойного питания могут рассматриваться как чуждые рассматриваемой классификации в отношении генератора и управления генератором. Отличие от синхронных генераторов с постоянным возбуждением заключается в том, что синхронные генераторы с независимым возбуждением, рассматриваемые в соответствии с настоящим изобретением, также могут управляться посредством возбуждения. В этом отношении, следует также понимать, что синхронные генераторы с независимым возбуждением означают, что якорь синхронного генератора возбуждается посредством тока возбуждения или напряжения возбуждения. Соответственно, установка тока возбуждения или напряжения возбуждения может использоваться для воздействия на эксплуатационный режим. Термин якорь используется в настоящем случае особенно, во избежание путаницы с аэродинамическим ротором ветряной турбины, другими словами ротором, который имеет лопатки ротора, которые перемещаются ветром.
В остальном, принципиально проводится различие между ветряными турбинами, не имеющими зубчатой передачи и основанными на зубчатой передаче. В ветряных турбинах, не имеющих зубчатой передачи, к которым относится настоящее изобретение, в частности, якорь генератора механически соединен непосредственно с аэродинамическим ротором, так что якорь и аэродинамический ротор имеют одинаковую скорость во время работы.
Синхронный генератор с независимым возбуждением может управляться, в частности, благодаря, во-первых, устанавливаемому току возбуждения или напряжению возбуждения, а во-вторых, потребляемой мощности, что - в упрощенном виде - приводит к управлению электрической нагрузкой на статор управляемого синхронного генератора.
Такое управление осуществляется, по существу, на основе эксплуатационного режима ветряной турбины, что часто также означает, что оно происходит на основе преобладающей скорости ветра. Альтернативно, могут быть другие причины для изменения эксплуатационного режима, такие как, например, применимое прямое или косвенное требование со стороны оператора сети системы электроснабжения, в которую поставляет ветряная турбина. Ситуации или условия, относящиеся к безопасности или охране окружающей среды, также могут потребовать изменения эксплуатационного режима.
По сути, также проводится различие между режимом частичной нагрузки и режимом полной нагрузки. В режиме частичной нагрузки, по меньшей мере, в соответствии с некоторыми конструкциями управления, скорость и мощность ветряной турбины устанавливаются на основе преобладающей скорости ветра. В режиме полной нагрузки, с другой стороны, ветряная турбина ограничена номинальной мощностью и номинальной скоростью и, следовательно, работает с фиксированным эксплуатационным режимом в этом отношении с любой скоростью. Ограничение номинальной скорости и номинальной мощности достигается, в частности, путем регулировки лопастей ротора, а именно за счет того, что они вращаются вне ветра при увеличении ветра, так что, несмотря на усиливающийся ветер, больше энергии не берется от ветра.
Эксплуатационный режим обычно устанавливается в режиме частичной нагрузки таким образом, чтобы постоянный угол лопастей, который предполагается аэродинамически оптимальным, был установлен для лопастей ротора. Затем лопасти ротора приводятся в движение ветром, и создается скорость. На основе этой скорости вырабатывается выходная мощность для ветряной турбины и, следовательно, в конечном итоге для генератора. Если эта мощность генератора соответствует мощности, получаемой от ветра, создается соответствующий стабильный эксплуатационный режим для скорости и мощности. В противном случае, скорость изменяется, и новое значение мощности вырабатывается в соответствии с новой скоростью, пока не будет найден стабильный эксплуатационный режим.
Мощность генератора также может быть установлена на основе характеристической кривой или таблицы, другими словами называемой справочной таблицы. Упомянутая таблица также может хранить мощность возбуждения, которая должна быть установлена, другими словами управляющий ток или напряжение возбуждения, которое должно быть установлено.
В этом отношении, ветряная турбина также может управляться надежно и эффективно, в принципе. Однако характеристические кривые или сохраненные таблицы могут оказаться неточными или, по меньшей мере, не способными к улучшению, потому что, например, они могут плохо воспроизводить динамические процессы. Временные изменения, такие как, например, тепловые воздействия, также могут плохо воспроизводиться в таблице или могут потребовать дополнительного уровня таблицы или размера таблицы. То же самое относится и к постоянным отличиям, которые могут быть причиной, например, процессов старения. Нелинейности вместе с другими влияющими переменными, такими как, например, вышеупомянутая температура, также могут плохо воспроизводиться в таблице.
Использование неоптимальных таблиц, даже если они только периодически менее чем оптимальны, может привести к снижению производительности. По меньшей мере, это может привести к тому, что ветряная турбина не будет работать с оптимальной производительностью.
Это может быть исправлено постоянным пересчетом записей таблицы, что, однако, является действительно сложным, а также может быть трудным или даже невозможным, особенно если необходимые входные величины для такого расчета являются неизвестными или их трудно установить.
Немецкое Ведомство по патентам и товарным знакам провело поиск следующего предшествующего уровня техники в приоритетной заявке для настоящей заявки: C.D. Nguyen и W.Hofmann: «Самонастраивающееся адаптивное управление минимизацией потерь в меди синхронных двигателей с внешним возбуждением», 2014 г., Международная конференция по электрическим машинам (ICEM), Берлин, 2014 г., стр. 897-902 (заявитель), DE 10 2010 043 492 A1, DE 11 2016 000 455 T5, EP 2 672 624 A1, DE 10 2011 006 670 A1 и DE 10 2016 106 590 A1.
Поэтому настоящее изобретение основано на задаче решения, по меньшей мере, одной из вышеупомянутых проблем. В частности, цель состоит в том, чтобы предложить решение, которое улучшает управление многофазным синхронным генератором с независимым возбуждением, в частности такое, чтобы выходная мощность, по меньшей мере, увеличивалась, предпочтительно, оптимизировалась. Целью является, по меньшей мере, предложить альтернативу ранее известным решениям.
Согласно изобретению, следовательно, предложен способ по п.1 формулы изобретения.
Соответственно, синхронный генератор в ветряной турбине является управляемым. Упомянутый синхронный генератор является многофазным и, предпочтительно, имеет не только одну трехфазную систему, но, скорее, несколько трехфазных систем. Соответственно, синхронный генератор также является многополюсным синхронным генератором, в частности, медленно работающим кольцевым генератором в ветряной турбине, не имеющей зубчатой передачи.
Дополнительно, синхронный генератор возбуждается независимо; таким образом, он получает свое возбуждение от входа соответствующей мощности возбуждения извне, а именно от регулятора возбуждения. Следовательно, синхронный генератор, который имеет статор и якорь, имеет вход возбуждения на якоре, чтобы вводить мощность возбуждения посредством тока возбуждения и напряжения возбуждения. Для этого, к входу возбуждения подключен регулятор возбуждения, который, например, может иметь форму регулятора тока, и может возбуждать якорь путем ввода соответствующего постоянного тока в качестве тока возбуждения. Регулятор возбуждения, то есть, например, упомянутый регулятор постоянного тока, также может использоваться для установки амплитуды мощности возбуждения посредством силы тока возбуждения, устанавливаемого регулятором постоянного тока, при необходимости, чтобы оставаться в этом примере.
Для подачи генерируемой мощности, статор имеет выход статора, на который подаются токи статора. Многофазный характер синхронного генератора в особенности относится к токам статора. Поэтому синхронный генератор, имеющий две трехфазные системы, который предлагается в качестве предпочтительного варианта в настоящем случае, выдает шесть токов статора, имеющих разные фазы, или подает один шестифазный ток статора.
Выход статора имеет выпрямитель, соединенный к нему для выпрямления токов статора и подачи их в звено постоянного тока, подключенную к выпрямителю. Все фазы тока статора, то есть, другими словами, например, шесть фаз, чтобы оставаться в вышеприведенном примере, таким образом, выпрямляются и обеспечиваются в звено постоянного тока. Это означает, что мощность генератора, подлежащая доставке, обеспечивается в звено постоянного тока. Звено постоянного тока может инвертировать мощность, обеспечиваемую таким образом, например, посредством инвертора, для подачи в систему электроснабжения, и может соответствовать требованиям системы электроснабжения.
Дополнительно, выпрямитель является управляемым, чтобы регулировать токи статора. Задача выпрямителя, таким образом, состоит не только в том, чтобы обеспечить мощность, передаваемую генератором в звено постоянного тока, но скорее в том, что выпрямитель также осуществляет управление генератором посредством управления токами статора. Таким образом, управление токами статора также позволяет устанавливать или влиять на эксплуатационный режим генератора.
Система синхронного генератора, предложенная в настоящем случае, а также взятая за основу для дальнейших этапов, позволяет, таким образом, управлять генератором, в частности его эксплуатационным режимом, по меньшей мере, посредством управления мощностью возбуждения и управления токами статора, позволяя дополнительно управлять генератором, в частности, его эксплуатационным режимом. Таким образом, эксплуатационный режим генератора может быть управляемым, по меньшей мере, посредством этих двух вариантов воздействия.
Для этой системы предлагаются следующие этапы для управления и подготовки управления.
Сначала определяется скорость якоря.
Это может быть измерено, или может быть использовано значение скорости, которое, в любом случае, часто присутствует в элементе управления. Определение скорости, а также описанные дальнейшие этапы в основном выполняются непрерывно в повторяющейся процедуре. В частности, этапы способа для обнаружения также могут выполняться одновременно.
Кроме того, определяется мощность, которая должна быть поставлена синхронным генератором или ветряной турбиной, которая, следовательно, образует заданное значение мощности. Это осуществляется на основе скорости. В частности, это может быть основано на характеристической кривой скорости/мощности, которая устанавливает соотношение между скоростью и мощностью и, соответственно, скорость берется в качестве основы для выведения соответствующего значения мощности из характеристической кривой скорости/мощности и использования его в качестве заданного значения мощности. В качестве альтернативы, одна возможность состоит в том, чтобы принимать во внимание дополнительные условия, такие как, например, внешние условия, которые предписывают, например, снижение скорости для уменьшения шума, или по другим природоохранным причинам, в качестве только двух примеров.
Выражаясь в упрощенном виде, ток возбуждения, который также всегда является характерным напряжению возбуждения ниже, выбирается таким образом, чтобы можно было подавать заданную мощность. Выражаясь в упрощенном виде, увеличение заданной мощности также приводит к увеличению тока возбуждения, что означает, что генератор может выдавать эту более высокую мощность. Однако это только один пример для иллюстративных целей, поскольку принципиально возможно, что только увеличение скорости при той же мощности возбуждения или с тем же током возбуждения также может привести к увеличению выходной мощности синхронного генератора.
Во всяком случае, определенный таким образом ток возбуждения затем также используется при управлении генератором, то есть он вводится на вход возбуждения якоря. Преобразование может быть обеспечено регулятором тока, как уже описано.
Дополнительно, токи статора, которые должны быть поданы, также определяются на основе обнаруженной скорости и определенной заданной мощности. Эти определяемые таким образом токи статора затем соответственно формируют заданные токи статора. Выходная мощность генератора получается, по существу, из токов статора и связанного с ним напряжения статора на выходе статора. Однако для общего баланса генератора, мощность возбуждения, подаваемая, например, упомянутым регулятором тока, также должна быть вычтена.
Кроме того, предлагается, чтобы выпрямитель управлялся таким образом, чтобы определенные токи статора, которые должны быть поданы на выход статора, были установлены на заданные значения токов статора. Величина токов статора получается в первую очередь от синхронного генератора, а именно, в частности, от заданной мощности возбуждения и скорости якоря.
Во-вторых, токи статора также зависят от схемы, которая в настоящем случае формируется, по существу, управляемым выпрямителем. Принципиально, в данном случае также существует возможность фильтра, который подключен к выходу статора. Однако такой фильтр также может быть обеспечен управляемым выпрямителем.
Таким образом, управление теперь работает следующим образом. Определяется скорость якоря, и это берется за основу для установки заданного значения мощности, и это достигается установкой тока возбуждения, а выпрямитель используется для управления токами статора.
Кроме того, предлагается, чтобы определение тока возбуждения или напряжения возбуждения и, дополнительно или альтернативно, определение токов статора, которые должны быть поданы, другими словами определение заданных значений токов статора, осуществлялось посредством устройства адаптивного управления. Ток возбуждения или напряжение возбуждения и токи статора, которые должны быть поданы, другими словами, заданные значения токов статора, образуют управляющие переменные для устройства управления в этом случае. Таким образом, предлагается, по меньшей мере, адаптивное управление током возбуждения или напряжением возбуждения и, дополнительно или альтернативно, адаптивное управление токами статора.
Адаптивное управление, то есть управление, которое приспосабливается к чему-либо, является в этом случае управлением, которое приспосабливается к параметрам, но не к переменным состояния в смысле техники управления.
Таким образом, обнаруженная скорость якоря является переменной состояния, а также мощность, которая должна быть подана, другими словами, заданная мощность, также является переменной состояния.
Параметры, а именно системные параметры, являются свойствами системы, то есть, например, внутренним сопротивлением или индуктивностью генератора.
В соответствии с одним вариантом осуществления, предлагается, чтобы параметры синхронного генератора оценивались как оценочные величины для синхронного генератора посредством оценивающего устройства, а устройство адаптивного управления определяло свои управляющие переменные с учетом оценочных величин. Следовательно, устройство адаптивного управления управляет током возбуждения или напряжением возбуждения и, дополнительно или альтернативно, токами статора, которые должны передаваться в качестве переменных управления. Затем это устройство управления определяет эти переменные управления с учетом оценочных величин. В частности, для этой цели, устройство управления имеет, по меньшей мере, один закон управления, который в простейшем случае может содержать коэффициент усиления и/или, по меньшей мере, одну постоянную времени. Такой закон управления может быть скорректирован или изменен с учетом оценочных величин.
Следовательно, в данном случае под оценкой параметров понимается, в частности, идентификация параметра, а не оценка состояния.
Выражаясь в иллюстративных терминах, может быть, например, взаимосвязь посредством семейства характеристических кривых между обнаруженной скоростью и определенной заданной мощностью, с одной стороны, и током возбуждения или напряжением возбуждения, с другой стороны. Адаптация позволяет варьировать, например, смещать это семейство характеристических кривых на основе оценочной величины, например, чтобы привести простой пример. Это является тогда примером адаптации устройства управления.
Предпочтительно, одна или несколько индуктивностей намагничивания, сопротивление статора и/или сопротивление возбуждения оцениваются как оценочные величины для синхронного генератора и затем используются для адаптации устройства адаптивного управления. Таким образом, устройство адаптивного управления зависит от одной или нескольких оцененных индуктивностей намагничивания и/или от оцененного сопротивления статора и/или от оцененного сопротивления возбуждения.
В этом случае было признано, что, в частности, три указанные величины, а именно индуктивность намагничивания, сопротивление статора и сопротивление возбуждения, могут быть переменными или могут быть известны неточно и могут оказывать ощутимое влияние, во всяком случае, в некоторых эксплуатационных режимах, на эксплуатационный режим или выбор или регулировку эксплуатационного режима. Кроме того, было признано, что непосредственное или прямое измерение одного или нескольких из этих параметров синхронного генератора вряд ли возможно, по меньшей мере, связано с трудностями. Соответственно, предлагается способ оценки. Предпочтительно, способ оценки работает так, что оценка может выполняться во время нормальной работы, то есть может проводиться интерактивно.
По существу, оценка параметров может быть сложной и занимать вычислительную мощность и/или вычислительное время. Однако было признано, что оценка параметров может быть выполнена при значительно более низкой частоте повторения, чем фактическая установка тока возбуждения или напряжения возбуждения и токов статора. Таким образом, может быть предусмотрен сравнительно медленный алгоритм для оценки этих параметров, и это также имеет то преимущество, что также может быть выполнена соответственно более редкая передача оцененных параметров, то есть передача с низкой скоростью передачи. Это также позволяет освободить каналы передачи от нагрузки, или введение такой оценки параметров означает, что для этих систем передачи нет необходимости в значительной дополнительной нагрузке.
Кроме того, было признано, что, в частности, индуктивность намагничивания влияет на ток возбуждения, более конкретно на изменения тока возбуждения, и что ток возбуждения приводит к различной мощности возбуждения в якоре на основе индуктивности намагничивания. Теперь это может быть принято во внимание благодаря согласующему с ним устройству адаптивного управления.
Сопротивление возбуждения также может влиять на ток возбуждения или изменять влияние тока возбуждения в якоре, и эта проблема может быть преодолена устройством адаптивного управления. Сопротивление статора влияет, в частности, на токи статора или многофазный ток статора. Сопротивление статора может, в частности, также влиять на компонент реактивной мощности в генераторе. Сопротивление статора приводит к разнице между фазовым углом между током статора и напряжением статора в обмотках статора по сравнению с фазовым углом между током статора и выходным напряжением на выходе статора. Теперь это может также учитываться предлагаемым устройством адаптивного управления, если оценивается сопротивление статора.
В соответствии с одним вариантом осуществления, предлагается, чтобы устройство адаптивного управления определяло свои управляющие переменные, принимая во внимание модель синхронного генератора и полученные из нее зависимости на основе оцененных величин для синхронного генератора, или оценочные величины для синхронного генератора.
В частности, такая модель используется или хранится в устройстве управления или связанных правилах расчета.
Затем эта модель может быть взята за основу для регулировки, в частности, приведенных величин тока возбуждения и токов статора, так что получается желаемый отклик генератора, в частности, что получается заданное значение мощности, определенное на основе обнаруженной скорости. Принимая во внимание модель синхронного генератора, также можно помочь установить оптимальный эксплуатационный режим. Если используется модель синхронного генератора, желаемое заданное значение мощности также может быть найдено для наименьших возможных потерь. Другими словами, токи, в частности токи статора, могут быть выбраны и установлены для получения оптимальной мощности.
Предложенная адаптация и, в этом случае, адаптация модели на основе оценочных величин для синхронного генератора, как предлагается в этом варианте осуществления, позволяют также отслеживать эту модель по фактическим изменениям в модели величин, принимаемых во внимание для синхронного генератора. В частности, это препятствует тому, чтобы устройство управления определяло или предписывало ток возбуждения и/или токи статора на основе неверной модели. В частности, использование модели может быть проблематичным, если она слишком сильно отличается от реальной системы, которую она должна описывать. Предложенная адаптация на основе оценки величин для синхронного генератора позволяет избежать этой проблемы или, по меньшей мере, уменьшить ее.
В соответствии с дополнительным уточнением, предлагается, чтобы ветряная турбина была в форме ветряной турбины, не имеющей зубчатой передачи, дополнительно или в качестве альтернативы, синхронный генератор имел форму кольцевого генератора. Таким образом, способ применяется к конкретной ветряной турбине такого типа. В случае ветряной турбины, не имеющей зубчатой передачи, якорь генератора напрямую механически связан с аэродинамическим ротором ветряной турбины. В частности, это означает, что якорь вращается очень медленно, а именно со скоростью аэродинамического ротора. Номинальная скорость аэродинамического ротора находится, например, в диапазоне от 5 до 10 об/мин. Это, предпочтительно, основано на ветровых турбинах этого типа, по меньшей мере. Это затем является соответственно также скоростью генератора или его якоря во время номинальной работы, и скорость является ниже, чем в режиме частичной нагрузки.
В соответствии с этим вариантом осуществления, предлагаемый способ, следовательно, относится к медленно работающему генератору. В частности, управление таким генератором может существенно отличаться от управления стандартным генератором, который имеет номинальную скорость 1500 или 3000 об/мин. Такие генераторы в ветряной турбине, не имеющей зубчатой передачи, являются часто также уникальными в определенной степени, поскольку каждый из них изготавливается специально для ветряной турбины, и это производство регулярно имеет большой ручной компонент.
То же самое относится к предлагаемому кольцевому генератору, который отличается, в частности, очень большим числом пар полюсов, которое составляет, в частности, по меньшей мере, 48, в частности, по меньшей мере, 96 и, в частности, 192. Кольцевой генератор имеет свои магнитно-эффективные области только в кольце в области воздушного зазора. В частности, кольцевой генератор отличается тем, что он не имеет магнитно-эффективного материала или магнитно-эффективных областей во внутренней области вокруг его оси вращения диаметром от 0 до, по меньшей мере, 50% от его диаметра воздушного зазора. Другими словами, эта внутренняя область содержит, если вообще имеется, несущие конструкции или, возможно, вентиляционные опорные конструкции или тому подобное. Такой кольцевой генератор также ведет себя совершенно иначе, чем обычный генератор, который рассчитан на скорость 1500 или 3000 об/мин.
Дополнительно или альтернативно, в статоре имеются, по меньшей мере, две трехфазные системы. Альтернативно, существует возможность, например, четырех трехфазных систем. В этом случае, каждая трехфазная система, по существу, образует независимую систему статора с общим используемым ротором. Когда в статоре имеются две трехфазные системы, они, предпочтительно, сдвинуты по фазе на 30 градусов относительно друг друга. Это позволяет добиться хорошего использования генератора и, в частности, также высокого уровня сглаживания во время выпрямления этих шести фаз. Тем не менее, это может потребовать более высокого уровня сложности для модельно-зависимого рассмотрения.
Тем не менее, было признано, что предлагаемое устройство адаптивного управления и, в частности, оценка параметров позволяют достичь высокого уровня качества. В то же время такая, по меньшей мере, двукратная трехфазная система статора может также достигать эффекта, при котором отдельные токи статора, другими словами, фазы общего тока статора, могут иметь особенно низкие значения тока. Дополнительно, существует также, по меньшей мере, частичная отказоустойчивость. По меньшей мере, если одна из двух трехфазных систем статора выходит из строя, оставшаяся система все еще может работать, даже если генератор больше не сможет выдавать номинальную мощность.
В частности, предлагается, чтобы модель, используемая для синхронного генератора, описывала, по меньшей мере, эти две трехфазные системы в статоре, то есть описывала, по меньшей мере, две трехфазные системы статора.
Предпочтительно, чтобы, по меньшей мере, одна индуктивность синхронного генератора работала в диапазоне насыщения, и по меньшей мере, один параметр, который изменился в результате этого насыщения, определялся устройством оценки. Насыщение индуктивности означает, что плотность магнитного потока больше не увеличивается или, по меньшей мере, не увеличивается значительно дальше, несмотря на дальнейшее увеличение напряженности магнитного поля. Это может регулярно приводить к тому, что реакция соответствующего компонента приближается к реакции нереактивного сопротивления. Таким образом, это является возможным, даже если насыщение может быть оценено со сравнительной трудностью для такого изменения параметра, которое будет обнаружено устройством оценки. Соответственно, в качестве предпочтительной реализации, используемая модель может быть соответствующим образом адаптирована.
Предпочтительно, эксплуатационный режим выбирается сознательно, при котором, по меньшей мере, одна индуктивность работает в диапазоне насыщения, чтобы тем самым соответствующим образом адаптировать отклик синхронного генератора. В частности, это относится к индуктивной связи и может также относиться к преобразованным индуктивностям в этом случае. Насыщение может быть получено физически как в статоре, так и в роторе синхронного генератора. Эксплуатационный режим выбирается, в частности, так, чтобы индуктивности намагничивания работали в режиме насыщения.
В соответствии с одним вариантом осуществления, предлагается, чтобы устройство оценки оценивало параметры синхронного генератора, принимая во внимание, по меньшей мере, одно напряжение статора и, дополнительно или альтернативно, по меньшей мере, один ток статора в качестве входной величины для оценки параметров. Соответствующие параметры синхронного генератора оцениваются, в частности, по напряжению статора и/или току статора. Поэтому было признано, что соответствующие параметры могут быть оценены с использованием напряжения статора и/или тока статора.
Предпочтительно, все три напряжения одной из нескольких трехфазных систем статора используются для оценки параметров. Дополнительно или в качестве альтернативы, все три тока одной или той же трехфазной системы статора используются для оценки.
В этом случае было признано, что может быть использована трехфазная система статора, в частности, использованием применимых напряжений статора или токов статора, в частности, достаточных для оценки соответствующих параметров синхронного генератора. Это объясняется тем, что было признано, что этого достаточно, даже если имеется несколько трехфазных систем статора. Даже если эти многочисленные трехфазные системы статора в основном работают независимо друг от друга, их параметры все еще достаточно похожи в результате физической близости. Также было признано, что использование одной из множества трехфазных систем статора также может быть достаточным для оценки, если оценивается параметр или несколько параметров якоря.
Независимо от этого распознавания, предпочтительно можно, в частности, в целях резервирования, но не только для этого, предложить использовать несколько экземпляров трехфазных систем статора для оценки, в частности все трехфазные системы статора, если их больше двух. Напряжения статора и/или токи статора затем каждый детектируется и оценивается для оценки для этой цели также.
В соответствии с одним вариантом осуществления, предлагается, чтобы устройство оценки оценивало компоненты d/q составляющие индуктивности намагничивания синхронного генератора в качестве оценочных величин. Трехфазная система может быть преобразована в компоненты d/q известным способом с использованием так называемого d/q-преобразования. Эти компоненты затем воспроизводят лежащую в основе трехфазную систему с двумя компонентами, компонентом d и q, которые основаны на вращающейся системе, в частности, которая вращается вместе с якорем или ротором. Соответственно, на такие компоненты также влияет индуктивный отклик синхронного генератора, в частности статора. Когда рассматриваются компоненты d/q, связанный индуктивный отклик синхронного генератора также может быть разделен на d-компонент и q-компонент, то есть относящиеся к вращению якоря. Эти компоненты также упоминаются как индуктивности намагничивания генератора Lmd и Lmq. В связи с этим предлагается оценивать эти две индуктивности намагничивания, которые, следовательно, образуют d/q составляющие индуктивности намагничивания. Предпочтительно, чтобы таким образом оцененные d/q составляющие индуктивности намагничивания затем также использовались как часть модели синхронного генератора.
Подробности примера расчета будут объяснены ниже на основе уравнений, и в них также следует признать, что дополнительно имеется связь между индуктивностью намагничивания, а именно ее компонентой d, и током возбуждения, поскольку преобразование d/q является разработанным таким образом, что компонент d преобразованной трехфазной системы отражает плотность магнитного потока магнитного возбуждения. Следовательно, ток возбуждения также можно рассматривать как компонент d, причем этот компонент в основном соответствует току возбуждения, который в любом случае вводится как постоянный ток. Также может потребоваться преобразование действительного входного тока возбуждения в эту компоненту d тока возбуждения.
Следует подчеркнуть, что термин якорь используется для обозначения ротора генератора, чтобы избежать путаницы с аэродинамическим ротором ветряной турбины. Однако в электротехнике общепринятым термином является ротор, и поэтому в этом случае иногда делается ссылка на ротор, связанный с генератором, который затем следует понимать как синоним термина якорь. В частности, переменные, относящиеся к ротору или якорю, таким образом, также называются переменными ротора, такими как, например, поле ротора, которое обозначает поле, относящееся к ротору, или обозначает поле ротора. Таким образом, некоторые переменные также используют термин «ротор» или его сокращение в качестве индекса.
В частности, было признано, что крутящий момент синхронного генератора напрямую зависит от компонентов d-q тока статора, компонентов d-q индуктивности намагничивания и тока возбуждения или тока возбуждения i'fd, преобразованного для статора. Зная эту взаимосвязь, которая также будет указана позже в уравнении (1), можно определить ток статора или токи статора и ток возбуждения, чтобы, в частности, минимизировать потери. Следует отметить, что, поскольку уравнение (1), которое еще последует, будет конкретизировано для двух трехфазных систем статора, в настоящем случае могут быть приняты во внимание множественные трехфазные токи статора в силу каждого трехфазного тока статора, имеющего отдельный компонент d и отдельный компонент q. Соответственно, крутящий момент зависит от всех компонентов d и компонентов q всех трехфазных токов статора генератора.
В соответствии с дополнительным вариантом осуществления, предлагается, чтобы устройство адаптивного управления определяло заданные значения токов статора в координатах d/q, а заданные значения токов статора преобразовывались обратно в трехфазное представление с одним значением тока на фазу для управления выпрямителем, чтобы, таким образом, иметь лучшую возможность устанавливать определенные токи статора, которые должны выдаваться для заданного значения токов статора. Таким образом, вычисление выполняется в координатах d/q, тогда как отдельные фазовые токи затем соответственно задаются как заданные значения токов, другими словами, заданные значения фазовых токов, для установки этих токов статора.
Предпочтительно, звено постоянного тока соединено с инвертором, и инвертор преобразует энергию или мощность звена постоянного тока в трехфазный ток для подачи в систему электроснабжения. Таким образом, конкретный эффект, который может быть достигнут, заключается в том, что управляемый выпрямитель и управление током возбуждения означают, что синхронный генератор работает оптимальным образом насколько это возможно; в то же время электрическая мощность или электрическая энергия могут быть поданы в систему электроснабжения независимо от них. В частности, инвертор также может свободно задавать частоту и фазу трехфазного тока, который должен подаваться, независимо от вида эксплуатационного режима, в котором генератор работает каждый раз. В конечном счете, генератор тогда устанавливает, по существу, только ту мощность, которая должна быть подана, поскольку только столько энергии, сколько производит генератор, может поставляться на постоянной основе.
В соответствии с дополнительным уточнением, предлагается, чтобы заданное значение мощности определялось на основе обнаруженной скорости и на основе обнаруженной выходной мощности генератора или ветряной турбины в целом. Таким образом, учитывается не только скорость, но и текущая мощность.
В частности, это осуществляется так, что промежуточная мощность определяется по обнаруженной скорости. Эта промежуточная мощность также может упоминаться как теоретическое заданное значение мощности. Исходя из этой промежуточной мощности, которая, следовательно, фиксируется как заданное значение, и выходной мощности, которая, следовательно, формирует фактическое значение, ошибка управления определяется посредством сравнения заданного/фактического значения. Эта ошибка управления затем передается регулятору, в частности, PI регулятору (регулятор пропорционально-интегрального типа), чтобы в результате определить заданное значение мощности. Таким образом, это заданное значение мощности, которое должно быть определено, представляет собой мощность, которая должна быть установлена.
Если, например, скорость, таким образом, увеличивается, что приводит к увеличению промежуточной мощности, первоначально создается ошибка управления, которая затем исправляется, чтобы объяснить это в иллюстративной форме. Эта коррекция, в частности с использованием PI регулятора, допускает различия между мощностью, которая должна быть установлена, и фактической мощностью, подлежащей компенсации. Дополнительно, такой регулятор также может быть использован для лучшего влияния на динамический отклик отслеживания мощности. Предпочтительно, чтобы такой регулятор, в частности упомянутый PI регулятор, был настроен на динамический отклик синхронного генератора, в частности настроен на постоянную времени выхода генератора на рабочий режим, другими словами, выбранный или параметризованный на основе постоянных времени выхода на рабочий режим.
В частности, предлагается, чтобы устройство адаптивного управления управлялось таким образом, чтобы эффективность генератора была максимальной. Когда управляемый выпрямитель используется вместе с устройством адаптивного управления, становится возможным лучше управлять генератором, в частности, также принимать во внимание изменения в генераторе. В частности, токи статора могут затем регулироваться избирательно и максимально точно, а также возможно рассматривать ток возбуждения и токи статора в целом и находить оптимальную общую комбинацию. Конкретный эффект, который может быть достигнут при этом, заключается в том, что желаемая мощность, то есть требуемая выходная мощность генератора или ветряной турбины, устанавливается таким образом, чтобы упомянутые токи в целом, другими словами кумулятивно, имели самые низкие потери. Это тогда согласуется с максимальной эффективностью генератора для мощности, которая требуется в данный момент.
В соответствии с дополнительным уточнением, предлагается, чтобы, по меньшей мере, одна индуктивность намагничивания оценивалась или определялась с использованием соответствующей характеристической кривой индуктивности. В этом случае, характеристическая кривая индуктивности устанавливает значения соответствующей индуктивности намагничивания на основе тока намагничивания, при этом значения характеристической кривой индуктивности постепенно адаптируются из начальной характеристической кривой посредством текущего способа или предварительного расчета. Характеристическая кривая индуктивности также может быть реализована как справочная таблица, в которой хранятся значения индуктивностей намагничивания, причем значения справочной таблицы адаптируются, то есть улучшаются, из начальных значений постепенно посредством текущего способа или оценки.
Другими словами, соответственно предлагается, чтобы начальные значения для индуктивности намагничивания сохранялись в адаптивном регуляторе, например, в форме характеристической кривой индуктивности и/или справочной таблицы, и чтобы эти начальные значения постоянно обновлялись оценочными значениями. Оценочные значения могут быть определены использованием эксперта, использующего алгоритм оценки, или посредством расчета. Это основано на понимании того, что индуктивности намагничивания могут изменяться в процессе работы. В частности, такое изменение может быть вызвано тепловым воздействием. Адаптация индуктивностей намагничивания позволяет принимать во внимание более точные значения индуктивностей намагничивания для создания токов статора.
Предпочтительно, предлагается, чтобы для определения заданных значений токов статора (Ie, Iqs1, Iqs2, Ids1, Ids2) соответствующая характеристическая кривая заданного значения тока статора использовалась для соответствующего одного из заданных значений токов статора. Характеристическая кривая заданного значения тока статора указывает соответствующую взаимосвязь между заданным значением мощности, которая должна быть подана, и соответствующим заданным значением тока статора, который должен быть определен. Соответствующее одно из заданных значений токов статора определяется в соответствии с соответствующей характеристической кривой заданного тока статора на основе заданного значения мощности, которая должна быть подана.
Помимо характеристической кривой индуктивности, соответственно, в адаптивном регуляторе может храниться еще одна характеристическая кривая, а именно характеристическая кривая заданного значения тока статора. Характеристическая кривая заданного значения тока статора служит для функции создания заданных токов статора (Ie, Iqs1, Iqs2, Ids1, Ids2) на основе заданного значения мощности, которое должно быть подана (Pvset). С этой целью, несколько характеристических кривых заданного значения тока статора могут быть, соответственно, сохранены для заданного значения тока статора в адаптивном регуляторе, который затем, соответственно, генерирует одно из заданных значений токов статора в соответствии с соответствующей характеристической кривой заданного значения тока статора на основе заданного значения мощности, которая должна быть подана.
Кроме того, предлагается, чтобы, по меньшей мере, одна из характеристических кривых тока статора, в частности каждая из характеристических кривых тока статора, была адаптирована к измененным условиям в повторяющейся процедуре. По меньшей мере, одна характеристическая кривая тока статора адаптируется на основе одной, нескольких или всех величин, таких как оценочные индуктивности намагничивания (


Повторяющаяся процедура для адаптации характеристических кривых тока статора выполняется реже, чем соответственно определяется одно из заданных значений токов статора в соответствии с соответствующей характеристической кривой заданного значения тока статора на основе заданного значения мощности, которая должна быть поставлена. В качестве примера, повторяющаяся процедура повторяется с частотой в диапазоне от 0,01 Гц до 10 Гц, тогда как заданные значения токов статора могут быть рассчитаны с частотой вычисления от 1 кГц до 16 кГц. Поэтому повторяющаяся процедура относится к процессу обновления характеристических кривых заданного значения тока статора. Эта процедура выполняется медленнее, например, каждую минуту, чем определение заданных значений токов статора. Для сравнения, заданные значения токов статора вырабатываются с высокой частотой, необходимой для приведения в действие преобразователя, например, в диапазоне кГц.
В соответствии с дополнительным уточнением, предлагается, чтобы заданные значения токов статора (Ie, Iqs1, Iqs2, Ids1, Ids2) определялись в интерактивном режиме на основе заданного значения мощности (Pset), в частности, по меньшей мере, на основе одной из множества или всех следующих величин, а именно оценочные индуктивности намагничивания (
Согласно изобретению, также предполагается, что ветряная турбина имеет многофазный синхронный генератор с независимым возбуждением, в котором:
- синхронный генератор имеет статор и якорь;
- якорь имеет вход возбуждения для ввода тока возбуждения или напряжения возбуждения,
- вход возбуждения имеет регулятор возбуждения, соединенный с ним для ввода тока возбуждения или напряжения возбуждения,
- статор имеет выход статора для подачи токов статора,
- выход статора имеет выпрямитель, соединенный для выпрямления токов статора и для подачи упомянутых токов в звено постоянного тока, подключенное к выпрямителю, и
- выпрямитель, управляемый для управления токами статора, причем синхронный генератор управляется благодаря
наличию условия для определения скорости для определения скорости якоря или аэродинамического ротора, и
наличию условия для устройства управления, которое предназначено для определения заданного значения мощности, которая должна быть подана синхронным генератором, или ветряной турбиной на основе обнаруженной скорости, и
определения тока возбуждения или напряжения возбуждения на основе обнаруженной скорости и определенного заданного значения мощности,
- регулятор возбуждения предназначен для ввода определенного таким образом тока возбуждения или определенного таким образом напряжения возбуждения на вход возбуждения,
- устройство управления, предназначено для определения токов статора, которые должны быть поданы как заданные значения токов статора, на основе обнаруженной скорости и определенного заданного значения мощности, и
для управления выпрямителем, для того, чтобы задавать определенные токи статора, которые должны быть поданы на выход статора для заданных значений токов статора, причем, по меньшей мере, для одного из этапов
определения тока возбуждения или напряжения возбуждения и
определения токов статора, которые должны быть поданы как заданные значения токов статора,
- устройство управления предусмотрено в виде устройства адаптивного управления, причем устройство управления сконфигурировано так, что ток возбуждения, или напряжение возбуждения, или токи статора, которые должны быть поданы, образуют переменные управления для устройства управления.
Поэтому предлагается ветряная турбина, которая, в частности, работает, как было объяснено выше в отношении способа управления многофазным синхронным генератором с независимым возбуждением. Она также основана на синхронном генераторе, как объяснено в этом отношении.
В частности, имеется средство для определения скорости, которое, однако, не обязательно должно быть в форме дополнительного измерительного блока, а скорее может также выполнять дополнительную обработку, например, в управляющем компьютере, и передавать скорость, уже обнаруженную ветряной турбиной иным способом.
В частности, с учетом внешних элементов управления, устройство управления также может использовать существующие конечные элементы управления. Оно может быть предусмотрено как отдельный физический блок, но оно также может быть реализовано и/или интегрировано в существующее устройство управления.
В частности, устройство управления может храниться как соответствующий программный код на управляющем компьютере, который присутствует в любом случае и, в частности, может быть встроено в стандартное управление ветряной турбины.
То обстоятельство, что устройство управления сконфигурировано так, что ток возбуждения или напряжение возбуждения и/или токи статора, которые должны быть переданы, формируют переменные управления для устройства управления, может, в частности, означать, что устройство управления имеет соответствующие выходные сигналы управления для этих отдельных переменных управления. Если устройство управления предусмотрено как физически отдельный элемент, такие выходы для переменных управления могут быть предусмотрены, например, в качестве соединительных клемм или в качестве вывода данных для шины данных или другого устройства передачи данных. В этом отношении, если это не предусмотрено в физически отдельной форме, устройство управления может также выводить управляющие переменные в качестве прикладных программных переменных в управляющей программе.
Предпочтительно, чтобы ветряная турбина предусматривала использование способа управления многофазным синхронным генератором с независимым возбуждением в соответствии, по меньшей мере, с одним вышеописанным вариантом осуществления такого способа. Следовательно, описанные преимущества могут принести пользу этой ветряной турбине, и она может работать в соответственно улучшенном, предпочтительно оптимизированном способе.
Изобретение более подробно поясняется ниже в качестве примера на основе вариантов осуществления со ссылкой на прилагаемые фигуры.
Фиг.1 показывает изображение в перспективе ветряной турбины.
Фиг.2 показывает значения компонентов d/q индуктивности намагничивания.
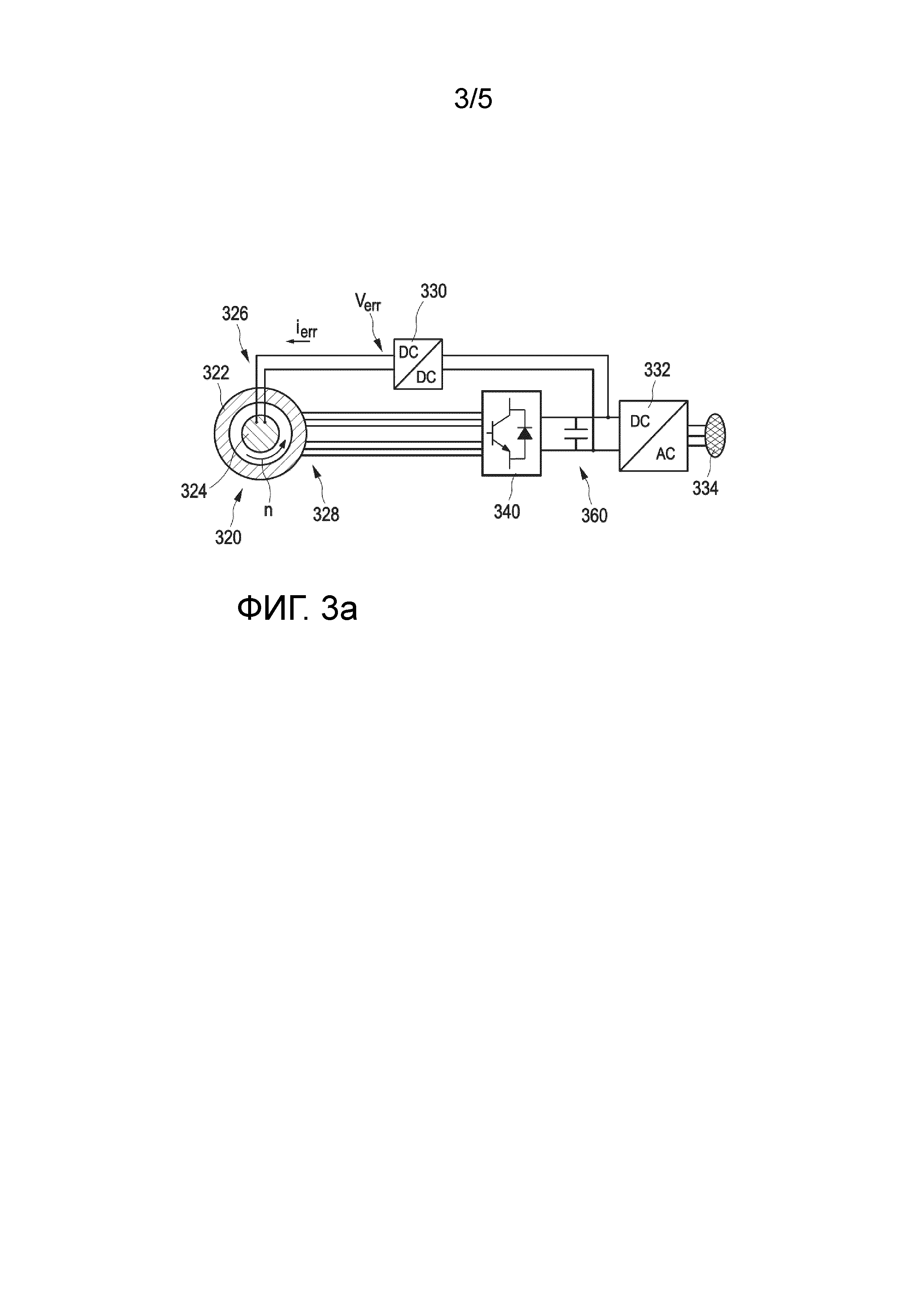
Фиг.3а схематично показывает генератор со структурой соединения.
Фиг.3 показывает схематичное изображение предлагаемой структуры регулятора.
Фиг.4 показывает детали, касающиеся структуры регулятора по фиг.3.
Фиг.4а показывает детали, касающиеся структуры регулятора по фиг.4 в одном варианте осуществления.
Фиг.4b показывает детали, касающиеся структуры регулятора по фиг.4 в альтернативном варианте осуществления.
Фиг.1 показывает ветряную турбину 100, имеющую башню 102 и гондолу 104. Расположенный на гондоле 104 ротор 106 имеет три лопасти 108 ротора и кок 110. Ротор 106 приводится во вращательное движение ветром во время работы и, в результате, приводит в движение генератор в гондоле 104.
Изобретение относится к способу адаптивного управления для адаптивного выпрямителя для шести фазного синхронного генератор с независимым возбуждением. Такая система предусмотрена как часть ветряной турбины, которая показана на фиг.1. Однако изобретение также может быть использовано для синхронных генераторов, имеющих больше фаз, в частности тех, которые имеют количество фаз, умноженное посредством деления системы. Предложенный способ управления дает возможность интерактивной идентификации параметров и соответствующей адаптации заданных значений тока генератора. В этом случае, заданные значения тока выбираются таким образом, чтобы эффективность генератора в каждом эксплуатационном режиме была оптимизирована в рабочих пределах.
Дальнейшее объяснение способа приведено ниже.
Для этого переменные тока и напряжения указываются преимущественно в ориентированной на поле ротора системе координат d/q. Преобразование ориентированных на статор временных характеристик, синусоидальных для целей упрощения, в систему координат d/q, вращающуюся с полем ротора, широко известно и объясняется в литературе.
Это преобразование предлагается ниже.
Крутящий момент Te шестифазной синхронной машины без демпферных обмоток может быть описан следующим образом:

где Р обозначает количество пар полюсов для машины,




Здесь следует понимать, что первая и вторая генераторные системы означают, в частности, первую и вторую системы статора.
Кроме того, обозначает ток возбуждения со ссылкой на статор и определяется следующим образом:
В уравнении (2) N обозначает число оборотов для машины, а ifd обозначает не трансформированный ток возбуждения, который также может называться ie или ierr.

Эти индуктивности зависят от насыщения и могут сильно отличаться от их номинальных значений во время работы в зависимости от тока намагничивания.
Первая оценка

где


Ток намагничивания im определяется следующим образом:

где

Во время теста на холостом ходу в статоре ток не течет, поэтому
Аналитические расчеты на основе геометрии генератора или посредством моделирования методом конечных элементов позволяют оценить тенденцию изменения компонентов d и q индуктивности намагничивания как функции

Это изображено на фиг.2.
Для конкретного эксплуатационного режима генератора, определяемого скоростью и заданным значением мощности, можно найти оптимальную комбинацию токов статора id1, iq1, id2 и iq2 и тока возбуждения ifd, которая способна минимизировать потери статора


Предполагая, что каждая фаза имеет одинаковое сопротивление




Здесь,


Потери на возбуждение рассчитываются посредством следующего уравнения:

где Verrпредставляет собой напряжение возбуждения, а Ierr представляет собой ток возбуждения.
Однако ограниченное напряжение звена постоянного тока, также называемое просто напряжением звена, означает, что не все эксплуатационные режимы с оптимальными потерями достижимы. Это особенно относится к случаям, когда выпрямитель работает как повышающий выпрямитель и, таким образом, напряжение звена постоянного тока всегда должно быть выше среднеквадратичного напряжения статора на определенный коэффициент.
Еще одним ограничивающим фактором является максимальная токонесущая способность элементов силовой электроники в выпрямителе, в частности полупроводниковых переключателей.
Таким образом, предлагается принять во внимание следующие ограничения:




Здесь,


и



Здесь


Итерационный алгоритм используется для вычисления всех возможных заданных значений статора и величин тока возбуждения, которые удовлетворяют показанным ограничениям. Эта комбинация выбирается так, чтобы минимизировать сумму потерь. Также возможно использовать известные градиентные методы или другие методы для нахождения максимума.
Было признано, что параметры генератора могут изменяться настолько сильно, что учет таких изменений может улучшить управление или автоматическое управление.
Для того чтобы как можно точнее рассчитать соответствующие заданные значения, полезно знать параметры



Сопротивление статора зависит от температуры и может быть рассчитано эмпирически с использованием следующего уравнения:

где

Паразитная индуктивность
Сопротивление



Если генератор находится в устойчивом состоянии, компоненты напряжения q и d статора могут быть рассчитаны посредством уравнений (11) и (12).
Таким образом, предлагается выполнять расчет в установившемся режиме, поскольку в переходном состоянии необходимо учитывать соответствующие потоки в двух уравнениях, что усложняет вычисление.
Предполагая, что




где




В этом случае необходимо рассматривать только одну из двух систем статора, поскольку было признано, что эти две системы статора можно считать идентичными. Токи и напряжения в уравнениях (17) и (18) содержат много гармоник, и поэтому предлагается, чтобы они были отфильтрованы. Частота переключения преобразователя зависит от эксплуатационного режима. Таким образом, предлагается использовать эксплуатационный режим, который является как можно более неблагоприятным для фильтрации, в частности, неблагоприятным эксплуатационным режимом является режим, при котором имеется низкая частота переключения и/или высокая гармоническая нагрузка, что предполагается, в частности, в случае высокой насыщенности, и что это должно быть принято за основу для обрезания необходимых постоянных времени фильтрации.
Фиг.2 показывает индуктивности намагничивания Lmd и Lmq в этом случае как функция тока Im намагничивания.
Значения индуктивности намагничивания Lmd примерно на 50-100% превышают значения Lmq. В частности, следует отметить, что значения индуктивностей намагничивания падают очень рано с ростом тока намагничивания и падают до значений, составляющих приблизительно 30% от их начальных значений. Это вызвано эффектами насыщения, по сути. Показанные характеристики также могут, однако, меняться, особенно в результате колебаний температуры.
Фиг.3а схематично показывает генератор 320 со структурой соединения. Генератор 320 имеет ротор или якорь 324, который вращается в статоре 322 со скоростью n. Статор 322 имеет выход статора 328, через который токи статора, в частности, два трехфазных тока статора в этом случае, подаются на активный выпрямитель 340. Активный выпрямитель 340 управляет токами статора и вырабатывает постоянное напряжение в звене 360 постоянного тока, к которому подключен инвертор 332, для подачи трехфазного тока в систему 334 электропитания, что указано только в иллюстративных целях в настоящем случае. Звено 360 постоянного тока также имеет регулятор 330 возбуждения, подключенный к нему, который генерирует напряжение Verr возбуждения или ток ierr возбуждения для ввода в якорь 324 на входе 326 возбуждения. Эта конструкция также является основой для фиг.3а, и генератор 320 в основном соответствует генератору 302 на фиг.3. Активный выпрямитель 340 на фиг.3а также в основном соответствует активному выпрямителю 304 на фиг.3.
Фиг.3 показывает общее представление предложенной структуры 300 управления. Входными сигналами для алгоритма являются скорость n и заданное значение мощности PSoll, которое зависит от скорости посредством характеристики мощности генератора. Эксперт получает напряжения и токи статора в качестве входных значений и использует уравнения (17) и (18) для вычисления компонентов d и q индуктивности намагничивания.
Управляющая структура 300 на фиг.3 основана на генераторе 302 и активном выпрямителе 304, который выпрямляет для звена 306 постоянного тока. Генератор 302 имеет две трехфазные системы статора и, таким образом, использует две трехфазные выходные линии 308 и 310, чтобы подавать свой ток статора на активный выпрямитель 304 в виде двойного трехфазного тока статора. Часть автоматического управления образована устройством 312 оценки, которое также может называться блоком на наблюдения, но в этом случае оценивает параметры, а именно две индуктивности намагничивания Lmd и Lmq. В этом отношении входными величинами для устройства 312 оценки являются напряжение VS статора и ток IS статора. Значения получаются устройством 312 оценки от генератора 302. В этом отношении также возможно, что эти количества уже были получены другим способом и, например, доступны в управляющем компьютере, и чтобы устройство 312 оценки могло использовать эти количества в нем. Таким образом, устройство 312 оценки не обязательно должно иметь собственное измерительное средство на генераторе 302.
Результатом устройства 312 оценки являются две индуктивности намагничивания Lmd и Lmq, или они также могут называться компонентами d и q индуктивности намагничивания. Эти две величины вводятся в адаптивный регулятор 314. Адаптивный регулятор 314 дополнительно принимает текущую скорость n и текущее заданное значение мощности Psoll в качестве входных величин. Текущее заданное значение мощности Psoll получается из характеристической кривой скорости/мощности, сохраненной в блоке характеристической кривой скорости/мощности, называемом в упрощенном виде как блок 316 n-P.
Скорость n описывает скорость аэродинамического ротора, поскольку характеристическая кривая мощности/скорости, сохраненная в блоке 316 n-P, соответствует аэродинамике. Следовательно, эта скорость n также оказывает решающее влияние на генератор 302 и поэтому показана как входная переменная для генератора 302. В случае ветряной турбины, не имеющей зубчатой передачи, предлагаемой в настоящем случае, скорость n аэродинамического ротора соответствует скорости генератора, то есть скорости якоря.
Затем адаптивный регулятор 314 использует текущую скорость n и текущее установленное заданное значение Psoll мощности для вычисления напряжения Ve возбуждения, которое должен обеспечивать регулятор возбуждения, чтобы обеспечить мощность возбуждения в генераторе 302, который выполнен в виде отдельно возбужденного генератора. Кроме того, адаптивный регулятор 314 вычисляет заданные значения для тока статора или заданные значения для отдельных фазных токов двойного трехфазного тока статора. Причина заключается в том, что заданные значения для трехфазных токов ia, ib и ic для первого трехфазного тока статора и значения ix, iy и iz второго трехфазного тока статора вычисляются или устанавливаются. Эти заданные значения для тока статора или его компонентов затем преобразуются активным выпрямителем 304.
Для этого вычисления или условия адаптивный регулятор 314 учитывает изменения в индуктивности намагничивания, принимая во внимание применимые компоненты d и q, которые он получает от устройства 312 оценки.
Таким образом, значения тока статора или его компонентов и мощности возбуждения или вместо этого напряжение возбуждения могут, поэтому быть подобраны друг к другу оптимальным образом адаптивным регулятором 314. Кроме того, изменения в свойствах генератора 302 могут быть приняты во внимание в это время.
Фиг.4 показывает дополнительные подробности и варианты адаптивного регулятора по фиг.3. Он изображает блок 412 наблюдения, который вместе с блоком 413 адаптации можно приравнять, например, к устройству 312 оценки на фиг.3.
Блок 412 наблюдения принимает напряжение Vs статора, ток Is статора и ток Ie возбуждения в качестве входных величин и отмечает от них две составляющие Lmd и Lmq индуктивности намагничивания и ток Im намагничивания, которые он направляет в блок 413 адаптации. Однако блок 413 адаптации, который также может быть частью адаптивного регулятора в виде адаптивного регулятора 314 на фиг.3, затем адаптирует, по меньшей мере, среди прочего, значения индуктивности намагничивания.
Блок 413 адаптации является символической иллюстрацией изменения характеристик двух компонентов Lmd и Lmq индуктивности намагничивания. Верхний символический блок соответствует диаграмме на фиг.2, но только до тока намагничивания 4000 А. Таким образом, эта верхняя зависимость является начальной отправной точкой для этого блока 413 адаптации, который затем с этой целью оценивает новое значение для каждого из двух компонентов Lmd и Lmq в текущем эксплуатационном режиме, который обозначается текущим током намагниченности Im.
Это указано в блоке 413 адаптации в верхнем изображении двумя стрелками e, которые указывают на два вновь оцененных значения для Lmd и Lmq.
Характеристическая кривая для двух компонентов Lmd и Lmq индуктивности намагничивания изменяется соответствующим образом, как указано нижним графиком в блоке 413 адаптации. Эти две характеристические кривые, соответственно, содержат излом, но, оптимально, возможно, что дополнительные значения характеристических кривых также будут постепенно адаптироваться и приводить к общему изменению характеристических кривых.
Затем результат передается в блок 414 оптимизации, который затем может создавать величины заданных значений на их основе.
Параметры, передаваемые из блока 413 адаптации в блок 414 оптимизации, подробно не показаны на фиг.4, но, во всяком случае, передаются текущие значения компонентов Lmd и Lmq индуктивности намагничивания.
Однако также возможно перенести на них полностью измененные характеристические кривые характеристик компонентов Lmd и Lmq индуктивности намагничивания. С другой стороны, в этом случае также следует понимать, что блок-схема на фиг.4 должна быть символической, и все блоки могут быть реализованы в одном управляющем компьютере, а затем блок 414 оптимизации или алгоритм оптимизации, обозначенный таким образом, например, получает доступ к нужным значениям. Выбранное циклическое время составляло 0,01 с (Ts=1e-2).
Блок 414 оптимизации продолжает принимать величину заданного значения мощности Pset, обозначающее величину мощности, которая в настоящее время должна быть установлена, а именно, для выходной мощности, которая должна доставляться генератором или ветряной турбиной. Эта величина заданного значения Pset мощности, которую фактически необходимо установить, является результатом регулятора 416 заданного значения мощности, который в данном случае имеет форму PI регулятора. Этот PI регулятор 416 принимает требуемую выходную мощность Psoll и фактическое значение текущей выходной мощности Pm, которая поэтому также обозначает измеренную мощность. Если заданное значение мощности теперь изменяется, другими словами, если Psoll изменяется, нежелательно, чтобы соответственно, возможно, внезапное изменение также передавалось в блок оптимизации. Соответственно, предусмотрен регулятор 416 величины заданного значения P, который отслеживает значение Pset мощности, которое фактически необходимо установить в настоящее время равным величине заданного значения Psoll мощности с динамическим диапазоном.
Блок 414 оптимизации затем принимает указанные входные данные в качестве основы для расчета токов статора и напряжения возбуждения. Напряжение возбуждения может быть выведено непосредственно как напряжение Ve возбуждения, которое необходимо установить. Токи статора, которые необходимо установить, первоначально выводятся для каждой подсистемы статора в компонентах d/q. Соответственно, выводятся значения Iqs1, Ids1, Iqs2, Ids2. Однако они первоначально предоставляются блоку 415 преобразования, который преобразует эти компоненты d/q в компоненты a, b, c. Результат для рассматриваемых двойных трехфазных систем статора представляет собой шесть отдельных мгновенных значений, а именно: ia, ib, ic, ix, iy и iz. Эти шесть значений тока могут затем, как показано на фиг.3, быть поданы на активный выпрямитель (304 на фиг.3) в качестве мгновенных заданных значений. В противном случае, блоку 415 преобразования необходим текущий угол θ ротора, а именно ротора генератора, то есть якоря, для выполнения преобразования.
Следовательно, фиг.4 изображает адаптивный регулятор 314 по фиг.3 с дополнительными подробностями. Алгоритм 414 оптимизации вычисляет заданное значение тока Ierr возбуждения или соответствующее напряжение Verr возбуждения, обозначенное как Ve на фиг.4, и заданные значения тока статора

Исходя из баланса между двумя системами статора, заданные значения тока для этих двух систем являются идентичными. Шесть токов статора шести фазного генератора устанавливаются на основе требуемой мощности Pset и, следовательно, напряжения возбуждения Ve. В связи с этим полезно знать индуктивности намагничивания Lmd и Lmq. Соотношения в компонентах d/q представлены, в частности, в уравнении (1) и в дополнительных пояснениях и уравнениях. На основе уравнения (1) может быть найдено, например, рекурсивное решение.
Однако было признано, что индуктивности намагничивания не являются постоянными, а скорее могут зависеть от текущего эксплуатационного режима генератора. В частности, они зависят от тока намагничивания, как показано на фиг.2 и в верхней половине блока 413 на фиг.4. Кроме того, однако, также было признано, что индуктивности намагничивания могут дополнительно зависеть от дополнительных величин, в частности, могут зависеть от температуры. Это, в частности, означает, что характеристические кривые, показанные на фиг.2, являются переменными.
Предлагается принять это во внимание.
Блок 414 оптимизации учитывает, что индуктивности Lmd и Lmq намагничивания являются переменными посредством использования соответствующих текущих значений. В связи с этим, возможно найти рекурсивное решение на основе уравнения (1), например, для текущего эксплуатационного режима каждый раз, и можно принять это за основу для определения токов статора Ie, Iqs1, Ids1, Iqs2 и Ids2 в координатах d/q. Естественно, также возможно, чтобы рекурсивные решения такого типа или другие решения были определены заранее и сохранены в таблице, из которой они затем извлекаются во время работы.
Промежуточные значения могут быть интерполированы.
Поэтому блок 414 оптимизации предписывает установленные токи статора и, для этой цели, по меньшей мере, адаптирует используемые индуктивности намагничивания. Индуктивности намагничивания являются параметрами, и поэтому блок 414 оптимизации является адаптивным регулятором или частью адаптивного регулятора.
В этом отношении, блок 414 оптимизации принимает эти индуктивности намагничивания от блока 413 адаптации. Блок 413 адаптации, в частности, должен иллюстрировать, что индуктивности намагничивания подвержены изменению, и это изменение также принимается во внимание. Поэтому блок 413 адаптации вместе с блоком 414 оптимизации можно также понимать как адаптивный регулятор. Фактически, блок 413 адаптации используется, в частности, для иллюстрации предполагаемого изменения.
Начало отсчета в этом случае, а именно в соответствии с верхним графиком блока 413 адаптации, представляет собой взаимосвязь между током Im намагничивания и индуктивностями намагничивания, которая первоначально была сохранена как характеристика.
Однако было признано, что между ними могут быть различия.
Для того чтобы сделать это лучше, индуктивности намагничивания могут затем быть отмечены для соответствующего тока Im намагничивания, что также может быть названо оценкой.
Алгоритм наблюдения представлен как блок 412 наблюдения. Он может принимать ток Ie возбуждения, напряжение VS статора и ток IS статора в качестве входных величин и отмечать или оценивать и выводить индуктивности Lmd и Lmq намагничивания и ток Im намагничивания. На этой основе блок 412 наблюдения, таким образом, имеет функцию определения индуктивностей намагничивания Lmd и Lmq и тока Im намагничивания из упомянутых входных величин.
Это может быть достигнуто путем использования обычного алгоритма наблюдения на основе описания системы, как это предусмотрено, в частности, уравнениями (4), (17) и (18).
Альтернативно, блок 412 наблюдения может использовать алгоритм оценки или вычисление для определения индуктивности Lmd, Lmq намагничивания и тока Im намагничивания. Это также может быть выполнено на основе уравнений (4), (17) и (18).
Уравнения (4), (17) и (18) также относятся к текущим измеренным значениям, что означает, что они включают фактические влияния, особенно термически независимые влияния, используемые для определения. Таким образом, применение уравнений позволяет обнаруживать и учитывать изменения, зависящие от температуры.
Характеристическая кривая, показанная на фиг.2, может быть, таким образом, улучшена, соответственно.
Значения, наблюдаемые таким образом для Lmd, Lmq и Im, впоследствии вводятся в блок 413 адаптации после того, как они были определены для эксплуатационного режима блоком 413 наблюдения. Это обозначено двумя стрелками «е» на верхнем графике в блоке 413 адаптации. Стрелка «e», следовательно, иллюстрирует два значения, определенные блоком наблюдения, для Lmd и Lmq в конкретном эксплуатационном режиме на верхнем графике блока 413 адаптации.
Эти зависящие от эксплуатационного режима значения для Lmd и Lmq переносятся на нижний график блока 413 адаптации и приводят к двум показанным перегибам. Таким образом, начальные значения сохраняются в блоке 413 адаптации для индуктивностей намагничивания, например, в форме характеристической кривой или справочной таблицы, которые затем постоянно обновляются с использованием текущих значений из блока 413 наблюдения.
Обновленные или адаптированные значения для Lmd, Lmq и Im впоследствии передаются в блок 414 оптимизации, который учитывает обновленные значения для определения токов статора. Следовательно, блок 413 адаптации иллюстрирует, в частности, по сравнению с фиг.2, как индуктивности намагничивания определяются используемым блоком 412 наблюдения и как определяются индуктивности намагничивания, которые изменяются во время работы, чтобы впоследствии иметь возможность их учитывать в блоке 414 оптимизации с целью вычисления токов статора.
Фигуры 4а и 4b показывают варианты осуществления или детали, относящиеся к структуре регулятора по фиг.4, а именно, в частности, как определение заданных значений токов статора реализуется в блоке 414. В связи с этим, фиг.4а показывает определение заданных значений токов статора посредством расчета характеристической кривой. С этой целью блок 414 сохраняет три характеристические кривые 418 заданного значения тока статора.
Каждая из этих трех характеристических кривых заданного значения тока статора выводит величину заданного значения на основе заданного значения мощности Pset , которая должна быть подана, а именно Ie или Ve, Iqs1, Iqs2, Ids1, Ids2. Затем они преобразуются, как показано на фиг.4, но не показаны на фигурах 4а и 4b, в ia, ib, ic и ix, iy, iz и устанавливаются преобразователю 304 в качестве заданных значений токов. Характеристическая кривая заданного значения тока статора, поэтому соответственно указывает взаимосвязь между заданным значением мощности, которая должна быть подана, и соответствующим заданным значением тока статора, которое должно быть определено.
В дополнительном варианте осуществления на фиг.4а, иллюстрированном посредством трех пунктирных исправленных стрелок 419 и блока 420, характеристические кривые 418 заданного значения тока статора адаптированы к измененным условиям в повторяющейся процедуре. С этой целью, повторяющаяся процедура может выполняться в адаптивном регуляторе 414, а именно в блоке 420, который используется для адаптации характеристических кривых 418 заданных значений тока статора.
Адаптация иллюстрируется посредством трех обновленных стрелок 419.
В этом случае, повторяющаяся процедура 420 учитывает измененные условия в форме оценочных величин, а именно, в качестве оценочных индуктивностей намагничивания (


В альтернативном варианте осуществления, показанном на фиг.4а, на фиг.4b показано определение заданных значений токов статора в блоке 414 оптимизации, а именно посредством интерактивного определения или расчета.
Для этого заданные значения токов статора (то есть Iе, Iqs1, Iqs2, Ids1, Ids2) определяются в интерактивном режиме на основе заданного значения (Pset) мощности и, по меньшей мере, на основе одной, нескольких или всех величин
Для индуктивностей, а именно, в частности,
Эти одна или несколько таблиц обновляются на основе тока

Чтобы компенсировать как погрешности моделирования, так и проигнорированные потери, PI регулятор изменяет заданное значение мощности управления. Этот PI регулятор активен только вблизи заданных значений мощности и служит основой для генерации заданного значения тока до тех пор, пока не будет достигнута желаемая выходная мощность. В случае больших отличий от заданного значения, компонент I может быть деактивирован. Из-за довольно большой постоянной времени для генератора, заданные значения рассчитываются на низкой частоте, которая может составлять, например, 100 Гц, что является сравнительно низким значением по сравнению с максимальной тактовой частотой 10 кГц в стандартных микроконтроллерах.
Поэтому предложен активный выпрямитель для синхронной машины с независимым возбуждением и оптимизированным КПД машины.
Синхронная машина с независимым возбуждением может также упоминаться как синхронный генератор с независимым возбуждением. В частности, было описано управление синхронной машиной, имеющей две генераторные системы. В качестве альтернативы, способ может быть адаптирован для другого числа генераторных систем или систем статоров; в частности, помимо двух трехфазных систем, существует также возможность использования четырех или более систем статора.
Цель изобретения, в частности, состоит в том, чтобы эксплуатировать синхронную машину с независимым возбуждением, имеющую несколько генераторных систем или систем статора, а параметры, зависящие от насыщения, с оптимизированной эффективностью при использовании активного выпрямителя. Характеристика насыщения машины или оценка правильного отклика индуктивности намагничивания может быть достигнута с использованием описанного решения и может использоваться для способа управления активными выпрямителями, и это также позволяет характеристике насыщения машины быть принятой во внимание. Дополнительно представленное решение подходит для синхронных машин с независимым возбуждением.
Литературные ссылки [a] и [b], приведенные ниже, описывают решения для синхронных генераторов с независимым возбуждением.
Литературная ссылка [a] показывает способ управления синхронной машиной с независимым возбуждением.
Заданные значения тока рассчитываются аналитически посредством метода «множителя Лагранжа», чтобы минимизировать общие потери статора и ротора.
Представлен алгоритм самонастройки, который может изменять некоторые параметры аналитического расчета во время работы, предполагая, что машина находится в устойчивом состоянии.
Однако адаптируются только компонент i_d тока статора и ток возбуждения i_err.
Что касается оценки параметров, часто предлагаются методы, основанные на методах RLS (рекурсивный метод наименьших квадратов) или тому подобное, и для этого необходимо допущение об установившемся состоянии, чтобы игнорировать отклонение потоков. Для улучшения ситуации, оценка индуктивностей

Изобретение может быть использовано, по меньшей мере, в некоторых вариантах осуществления для управления синхронной машиной с независимым возбуждением, имеющей несколько генераторных систем. Предполагая, что параметры машины согласуются с фактическими свойствами машины, алгоритм может рассчитать соответствующий глобально оптимальный эксплуатационный режим, чтобы минимизировать потери статора и ротора для конкретного заданного значения мощности. Способ дает возможность скорректировать справочные таблицы для индуктивностей посредством интерактивной оценки параметров, которая может быть выполнена посредством алгебраической оценки измеренных величин генератора, а именно напряжений, токов и скорости.
Поскольку эксплуатационные режимы определяются с помощью числового итеративного расчета, требуется соответствующая вычислительная мощность. Проблема была признана, и расчет может быть выполнен на более низкой частоте по сравнению с тактовой частотой современных микроконтроллеров из-за высокой механической инерции машины и большой постоянной времени ротора.
[а] Chi D. Nguyen и W. Hoffman, «Самонастраивающийся адаптивный контроль минимизации потерь в меди синхронных двигателей с внешним возбуждением», Международная конференция по электрическим машинам (ICEM) 2014, стр. 897-902, 2-5 сентября, 2014.
[b] D. Kowal, P. Sergeant, L. Dupre’ и H. Karmaker, «Сравнение частотной и временной модели моделирования потерь в железе и магните, включая гармонические широтно-импульсные модуляции PMSG для применения энергии ветра», IEEE Trans. при преобразовании энергии, том. 30, № 2, с. 476-486, июнь 2015 г
Реферат
Изобретение относится к способу управления многофазным синхронным генератором с независимым возбуждением в ветряной турбине. Технический результат – повышение выходной мощности. Для управления токами статора синхронного генератора определяют скорость (n) якоря, заданное значение (PSoll) мощности, которая должна быть подана синхронным генератором на основе обнаруженной скорости (n), ток (ierr) или напряжение (verr) возбуждения на основе обнаруженной скорости (n) и определенной заданной мощности (PSoll). Определенные таким образом ток (ierr) или напряжение (verr) возбуждения вводят посредством регулятора возбуждения на вход возбуждения. Определяют токи статора, которые должны быть поданы как заданные токи статора, на основе обнаруженной скорости (n) и определенной заданной мощности (PSoll). Управляют выпрямителем, чтобы задавать определенные токи статора, которые должны быть поданы на выход статора для заданных токов статора. Дополнительно определяют ток (ierr) или напряжение (Verr) возбуждения и токи статора, которые должны быть поданы как заданные токи статора посредством устройства адаптивного управления. При этом ток ierrили напряжение verrвозбуждения или токи статора, которые должны быть поданы, формируют переменные управления для устройства управления. 2 н. и 14 з.п. ф-лы, 7 ил.
Формула


Комментарии