Система получения изображений с кардио-и/или дыхательной синхронизацией и способ 2-мерной визуализации в реальном времени с дополнением виртуальными анатомическими структурами во время процедур интервенционной абляции или установки кардиостимулятора - RU2529481C2
Код документа: RU2529481C2
Чертежи
Описание
Настоящее изобретение относится к области электрофизиологии (EP) сердца и, в частности, к процедурам радиочастотной абляции и установки кардиостимуляторов с контролем по изображениям. Для данных процедур предлагается отображать наложенные 2-мерно направляемые движения инвазивного приспособления, получаемые с одного и того же угла проекции во время интервенционной процедуры, при перемещении по анатомическим структурам разветвленных коронарных сосудов или камер сердца пациента, чтобы проводить, например, сердечно-сосудистый катетер к целевой структуре или патологическому изменению в сегменте сосуда сердца венозной системы сердца пациента или к представляющей интерес области внутри миокарда. Вышеописанным способом получают динамически дополняемую 2-мерную реконструкцию анатомических структур пациента во время проведения инвазивного инструмента. Посредством применения метода кардио- и/или дыхательной синхронизации можно обеспечить получение 2-мерных динамических изображений во время одних и тех же фаз сердечных и/или дыхательных циклов пациента. По сравнению с ранее известными решениями, которые основаны на совмещении и объединении данных изображений, независимо от полученных двумя различными средствами визуализации, значительно повышается точность двумерно реконструированных анатомических структур.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Сердечно-сосудистые заболевания (CVD), например атеросклероз, гипертензия и ишемия, являются основными причинами смертности в большинстве развитых стран, так как они вызывают необратимое поражение сердца и кровеносных сосудов, которые могут приводить к хронической сердечной недостаточности, стенокардии или инфаркту миокарда (сердечному приступу). Для пациента с симптомами заболевания электрической системы сердца (например, фибрилляцией, тахикардией, трепетание и т.п.) или обструкции сосудов диагностику и лечение обычно выполняют методами интервенционной кардиологии в лаборатории катетеризации сердца. Вследствие этого катетеризация сердца означает введение небольших трубок (катетеров) через артерии и/или вены в миокард. Чтобы визуализировать коронарные артерии и камеры сердца методом рентгеновской визуализации в реальном времени, по катетеру вводят контрастное вещество. Контрастное вещество должно быть непрозрачным для рентгеновского излучения и обеспечивать высокий контраст изображения по мере того, как контрастное вещество втекает в систему коронарных артерий или в камеры сердца. Данная процедура формирует изображение, называемое ангиограммой, которое пригодно для врача при наведении в анатомических структурах сердца.
В последние тридцать лет минимально инвазивная интервенционная кардиология с контролем по рентгеновским изображениям получила значительное развитие в связи с демографическими, технологическими и экономическими факторами. Новые катетерные инвазивные приспособления (например, баллонные катетеры и стенты) позволяют врачам лечить большее число заболеваний и пациентов с более сложными заболеваниями. Так как данные новые минимально инвазивные процедуры с контролем по изображениям дают положительные результаты лечения пациентов и стоят дешевле, чем процедуры на открытом сердце, то врачам активно рекомендуется правительственными и частными плательщиками использовать упомянутые процедуры.
В настоящее время рентгеновские системы для катетеризации сердца представляют один из современных стандартов медицинского обслуживания и обеспечивают средства визуализации как для диагностических, так и для лечебных процедур в кардиологии. Упомянутые системы применяют для формирования в реальном времени изображений обструкций кровотока в коронарных артериях. Когда идентифицируют обструкцию, рентгенографию реального времени используют для управления введением катетеров с наконечником, снабженным баллоном, к месту обструкции для лечения посредством ангиопластики (то есть посредством баллонного расширения суженого поперечного сечения потока в артерии) и установки стента (то есть посредством расширения опорной структуры для поддерживания вновь расширенной артерии в открытом состоянии). Цель терапии пациентов с заболеванием коронарных артерий состоит в смягчении симптомов стенокардии и снижении риска смерти или инфаркта миокарда посредством использования методов устройств для повторного раскрытия коронарных артерий.
Вышеописанная система катетеризации сердца фактически допускает проведение всех минимально инвазивных процедур в лаборатории катетеризации. Все системы, разработанные к настоящему времени, имеют, в своей основе, одинаковую архитектуру и используют точечный рентгеновский источник, который направляет рентгеновский пучок сквозь пациента и на детектор большой площади, при этом последний используют для преобразования сформированного 2-мерного изображения в электрические сигналы для отображения на мониторе. Тем самым получают рентгенограмму пациента.
Традиционно используемые системы катетеризации сердца обычно выполняют в реальном времени рентгеновскую визуализацию двух разных типов: диагностическую ангиографию и визуализацию в процессе хирургического вмешательства. Диагностическую ангиографию выполняют с высокой лучевой нагрузкой, чтобы сформировать высококачественные изображения. Данный диагностической (кино) режим формирует изображения введенного контрастного вещества, протекающего по коронарным артериям, чтобы диагностировать первоначальное состояние коронарных артерий, определить требуемое хирургическое вмешательство и повторно оценить коронарные артерии после хирургического вмешательства. Визуализацию в процессе хирургического вмешательства выполняют с регулируемой лучевой нагрузкой, которая дает низкокачественные изображения. Упомянутый интервенционный (флюороскопический) режим обеспечивает, тем самым, визуализацию в реальном времени анатомических структур пациента для направления хирургического вмешательства и применяется при вводе устройств в анатомические структуры. Интервенционный режим используют в течение, приблизительно, 90% времени визуализации процедуры.
Хотя сердечно-сосудистые заболевания влияют, главным образом, на кровоток пациента, электрофизиология (EP) сердца, специальная область интервенционной кардиологии, при которой врачи применяют внутрисердечные катетеры для локализации и лечения электрических дисфункций ритма сердца пациента под контролем рентгеноскопических изображений, предусматривает исследование электрических аномалий сердца. Врожденные пороки или патологическая ткань в сердце могут отрицательно сказываться на электрической проводимости, что приводит к неравномерному сердцебиению. Помимо этого, радиочастотная абляция (RFA) для лечения фибрилляции предсердий (AF) является очень сложной электрофизиологической (EP) процедурой. Фибрилляция предсердий является аритмией сердца, которая очень распространена и сопряжена с высокой смертностью и которая возникает, когда две верхние камеры сердца, левое предсердие (LA) и правое предсердие (RA), сокращаются неэффективно, и, в результате, кровь не полностью выкачивается из них и, вследствие этого, может накапливаться и свертываться. Если часть сгустка остается в сердце, это может вызвать приступ или эмболию легочной артерии. Другим последствием может быть неравномерное сердцебиение, передаваемое желудочкам, что будет больше сказываться на кровообращении. Для лечения фибрилляции предсердий, некоторые участки ткани можно подвергать абляции с помощью радиочастотной энергии, чтобы вылечить аномальную электрическую проводимость и навсегда восстановить нормальный сердечный ритм. Точнее, ткань сердца картографируют, чтобы выявить участки с аномальной электрической активностью, и подвергают абляции средствами электрофизиологии сердца, чтобы разрушить патологическую ткань на некоторых участках. Процедуры локализации и абляции соответствующих участков ткани являются очень длительными. Пациент может проводить в лаборатории катетеризации сердца от трех до шести часов, из которых до 90 минут может занимать чистое время визуализации. Пациент получает значительные дозы рентгеновского излучения, в эквиваленте до 30000 доз рентгенограммы грудной клетки, и врач-электрофизиолог, выполняющий процедуры, обычно, также получает значительную дозу рассеянного излучения. Электрофизиологические диагностика и лечение не требуют ввода контрастного вещества в коронарные артерии для получения подробных изображений и поэтому несколько менее требовательны к максимальным характеристикам визуализации. Большие продолжительности процедур обуславливают большое значение проблемы снижения лучевой нагрузки.
Другой важной процедурой является установка кардиостимулятора для терапии ресинхронизации сердца (CRT), при которой вывод кардиостимулятора следует вводить в коронарную вену. Врач-электрофизиолог должен иметь специальную подготовку, чтобы в совершенстве знать анатомические структуры и пути доступа ко всем представляющим интерес местам, а также определенную практику, чтобы выбирать надлежащие устройства и проводить их в направлении к назначенному месту.
Анатомические структуры сердца пациента можно записать с помощью традиционных устройств для 3-мерной визуализации (например, устройство CT (компьютерной томографии), MRI (магнитно-резонансной томографии), 3DRX (3-мерной визуализации по рентгеновским проекциям, полученным под разными углами поворота) или ультразвукового исследования) или посредством локального введения контрастного вещества непосредственно перед началом хирургического вмешательства (в левое предсердие (LA) и устье легочных вен (PV), в случае лечения методом RFA (радиочастотной абляции) фибрилляции предсердий, и коронарные вены и синус, в случае CRT (терапии ресинхронизации сердца)), однако, врач должен выполнять в уме совмещение для перемещения по динамическим рентгеноскопическим изображениям, на которых упомянутая информация больше не видна.
Предоперационно реконструированную 3-мерную карту анатомических структур сердца, подлежащих лечению, можно совмещать с интраоперационно получаемыми 2-мерными динамическими изображениями, чтобы сохранять видимость упомянутых структур во время интервенционной процедуры под визуальным контролем. С другой стороны, такое совмещение не учитывает дыхательные и сердечные движения пациента, в результате чего получаемая точность совмещения не достаточна при некоторых применениях. Трехмерную реконструкцию некоторых структур сердца можно также выполнять посредством магнитно или электрически локализуемых инвазивных приспособлений, например, применяемых в составе системы CARTO® RMT для электроанатомического картографирования, разработанной компанией Biosense Webster или в технологии EnSite NavX™ Navigation & Visualization (для навигации и визуализации), предложенной компанией St. Jude Medical.
Что касается процедур AF (лечения фибрилляции предсердий), то знание точных положений катетеров, при измерении электрических потенциалов, является решающим фактором для выявления источников, которые вызывают фибрилляцию (эктопических фокусов, циклов повторного входа электрического возбуждения). Еще более важным является анатомическое картографирование мест абляции, чтобы выполнять абляции с требуемой конфигурацией, например, изоляцию легочной вены или абляцию по линии крыши в левом предсердии.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
С учетом вышеизложенных фактов, целью настоящего изобретения является повышение точности интервенционной процедуры под визуальным контролем посредством уменьшения неточностей, которые могут возникать при совмещении и объединении изображений, которые получены различными, независимо работающими средствами визуализации. Так как большинство контрастных веществ являются очень дорогими и не всегда удовлетворительно переносимыми пациентами, то дополнительной целью настоящего изобретения является визуализация анатомических структур сосудистых структур сердца и/или камер сердца пациента, без необходимости введения контрастного вещества.
Для решения приведенных задач, первый примерный вариант осуществления настоящего изобретения относится к способу получения изображения для отслеживания направляемых движений инвазивного инструмента, при проведении по анатомическим структурам сердечно-сосудистой системы и/или камер сердца пациента, посредством интраоперационного получения и записи последовательности 2-мерных динамических изображений с одного и того же угла проекции и расстояния до объекта, при этом упомянутые изображения представляют инвазивный инструмент во время разных стадий упомянутого направляемого движения. В соответствии с настоящим изобретением, упомянутый способ содержит этапы записи конкретных фаз сердечного и/или дыхательного циклов пациента для каждого пути, во время получения и записи 2-мерных флюорограмм, и выбора набора таких изображений, которые соответствуют предварительно определяемой конкретной фазе сердечного и/или дыхательного циклов пациента, посредством кардио- и/или дыхательной синхронизации. При выполнении упомянутого этапа выбора и дальнейшего проведения инвазивного инструмента формируют виртуальную 2-мерную реконструкцию анатомических структур сердечно-сосудистой системы и/или камер сердца пациента посредством объединения 2-мерных синхронизированных положений инвазивного инструмента, которые выбраны до времени наступления упомянутого этапа формирования, при этом упомянутую 2-мерную реконструкцию динамически дополняют каждой вновь полученной и выбранной 2-мерной флюорограммой, с образованием, тем самым, наложенного 2-мерного представления различных стадий направляемого движения инвазивного инструмента. И, наконец, динамически скорректированный вариант двумерно реконструированных виртуальных анатомических структур отображают на экране монитора или дисплее посредством наложения и объединения вновь выбранных 2-мерных синхронизированных положений инвазивного инструмента с текущим вариантом реконструированных анатомических структур. При использовании данного способа можно исключить выполнение предоперационного сканирования методами CT (компьютерной томографии), MR (магнитно-резонансной томографии) или 3DRA (3-мерной поворотной ангиографии) для получения воксельных данных, необходимых для реконструкции 3-мерной модели анатомических структур сердечно-сосудистой системы и/или сердца пациента, которые, как известно из существующего уровня техники, требуется совмещать с интраоперационно получаемыми флюорограммами, показывающими текущее положение инвазивного инструмента, при его проведении во время хирургического вмешательства под визуальным контролем, что позволяет избежать неточностей совмещения, которые следует ожидать при использовании различных средств визуализации для предоперационного получения воксельных данных реконструированной 3-мерной модели и данных изображений интраоперационно получаемых флюорограмм.
В соответствии с изобретением, в предпочтительном варианте, вышеописанный способ можно выполнять в рамках радиочастотной абляции под рентгеновским контролем и процедуры установки кардиостимулятора для терапии ресинхронизации сердца, во время которой вывод кардиостимулятора устанавливают в коронарную вену.
В качестве дополнения, может быть обеспечен вариант, в котором способ получения изображения дополнительно содержит этап выполнения сеанса получения изображения методами CT (компьютерной томографии), MR (магнитно-резонансной томографии) или 3DRA (3-мерной поворотной ангиографии) с C-образной консолью для предоперационного получения и записи набора 3-мерных воксельных данных, необходимых для реконструкции 3-мерной модели анатомических структур коронарных сосудов и/или камер сердца пациента в подлежащей инвазивному лечению представляющей интерес области сердца и/или сердечно-сосудистой системы пациента. После этого, предоперационно записанные 3-мерные воксельные данные можно совмещать и объединять с динамически дополняемыми объединенными данными двумерно восстановленных 2-мерных анатомических структур, и полученные совмещенные и объединенные анатомические структуры можно отображать на экране монитора или дисплее.
Вышеописанный этап реконструкции 3-мерной модели анатомических структур коронарных сосудов и/или камер сердца может, тем самым, содержать этапы вычисления оптимального угла наблюдения с минимальным перспективным укорачиванием и минимальным перекрытием сосудов и отображения оптимальной карты их обзора в окне, представляемом на экране монитора или дисплее. Кроме того, можно обеспечить вариант, в котором выполняется 3-мерная сегментация представляющих интерес целевых структуры или патологического изменения и в котором приглушают яркость областей изображения, которые не содержатся в пределах сегментированных контуров упомянутых целевых структуры или патологического изменения.
Второй примерный вариант осуществления настоящего изобретения относится к системе обработки изображений, функционирующей в рабочей станции, которая связана с системой получения изображений, при этом упомянутая система получения изображений выполнена с возможностью выполнения способа получения изображений для отслеживания направляемых движений инвазивного инструмента, при проведении по анатомическим структурам сердечно-сосудистой системы и/или камер сердца пациента, посредством интраоперационного получения и записи последовательности 2-мерных динамических изображений с одного и того же угла проекции и расстояния до объекта, причем упомянутые изображения представляют инвазивный инструмент во время разных стадий упомянутого направляемого движения. В соответствии с настоящим изобретением, упомянутая система обработки изображений запрограммирована для записи конкретных фаз сердечного и/или дыхательного циклов пациента для каждого пути, во время получения и записи 2-мерных флюорограмм, выбора набора таких изображений, которые соответствуют предварительно определяемой конкретной фазе сердечного и/или дыхательного циклов пациента, посредством кардио- и/или дыхательной синхронизации, и, при выполнении упомянутого этапа выбора и дальнейшего проведения инвазивного инструмента, формирования виртуальной 2-мерной реконструкции анатомических структур сердечно-сосудистой системы и/или камер сердца пациента посредством объединения 2-мерных синхронизированных положений инвазивного инструмента, которые выбраны до времени наступления упомянутого этапа формирования, причем упомянутая 2-мерная реконструкция динамически дополняется каждой вновь полученной и выбранной 2-мерной флюорограммой, с образованием, тем самым, наложенного 2-мерного представления различных стадий направляемого движения инвазивного инструмента, и отображения динамически скорректированного варианта двумерно реконструированных виртуальных анатомических структур на экране монитора или дисплее посредством наложения и объединения вновь выбранных 2-мерных синхронизированных положений инвазивного инструмента с текущим вариантом реконструированных анатомических структур.
В соответствии с дополнительным аспектом данного варианта осуществления упомянутая система обработки изображений может быть оснащена инструментальным средством 2-мерного/3-мерного совмещения и объединения, выполненным с возможностью совмещения и объединения набора 3-мерных воксельных данных, предоперационно полученных и записанных для реконструкции 3-мерной модели анатомических структур коронарных сосудов и/или камер сердца пациента в подлежащей инвазивному лечению представляющей интерес области сердца и/или сердечно-сосудистой системы пациента, с динамически дополняемыми объединенными данными изображений двумерно восстановленных 2-мерных анатомических структур, а также инструментальным средством визуализации для отображения полученного совмещенного и объединенного изображения на экране монитора или дисплее.
Для выполнения этапа реконструкции 3-мерной модели анатомических структур коронарных сосудов и/или камер сердца упомянутая система обработки изображений может быть выполнена с возможностью вычисления оптимального угла наблюдения с минимальным перспективным укорачиванием и минимальным перекрытием сосудов и отображения оптимальной карты их обзора в окне, представляемом на экране монитора или дисплее. В дополнение в вышеописанным возможностям, система обработки изображений может быть дополнительно выполнена с возможностью выполнения 3-мерной сегментации представляющих интерес целевых структуры или патологического изменения и приглушения яркости областей изображения, которые не содержатся в пределах сегментированных контуров упомянутых целевых структуры или патологического изменения, удалены из изображения.
Кроме того, третий примерный вариант осуществления настоящего изобретения относится к рабочей станции или пульту оператора. В соответствии с настоящим изобретением, упомянутые рабочая станции или пульт оператора запрограммированы с использованием программного обеспечения, которое реализует систему обработки изображений, описанную выше со ссылкой на упомянутый второй примерный вариант осуществления.
И, наконец, в соответствии с четвертым примерным вариантом осуществления настоящего изобретения, предлагается компьютерный программный продукт, выполненный с возможностью выполнения способа, описанного выше со ссылкой на упомянутый первый примерный вариант осуществления, при исполнении в рабочей станции или пульте оператора, описанных выше со ссылкой на упомянутый третий примерный вариант осуществления.
По сравнению с другими подходами и решениями, известными из существующего уровня техники, настоящее изобретение не нуждается в каком-либо этапе совмещения с данными изображений от других средств формирования данных изображений, который может быть неточен и не может скомпенсировать движения. Применение специальных локальных инвазивных приспособлений (CARTO, NavX и т.п.), которые намного дороже по сравнению с решением, предлагаемым настоящим изобретением, больше не обязательно. Кроме того, виртуальные анатомические структуры, обеспечиваемые упомянутыми известными системами существующего уровня техники, непосредственно не связаны с рентгеновскими изображениями, и совмещение двух средств может быть сложным и неточным. Напротив, виртуальные анатомические структуры, получаемые способом, предложенным настоящим изобретением, естественно совмещаются с рентгеновскими изображениями.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Приведенные и другие полезные аспекты изобретения поясняются в дальнейшем на примерах со ссылкой на нижеописанные варианты осуществления и прилагаемые чертежи. На чертежах,
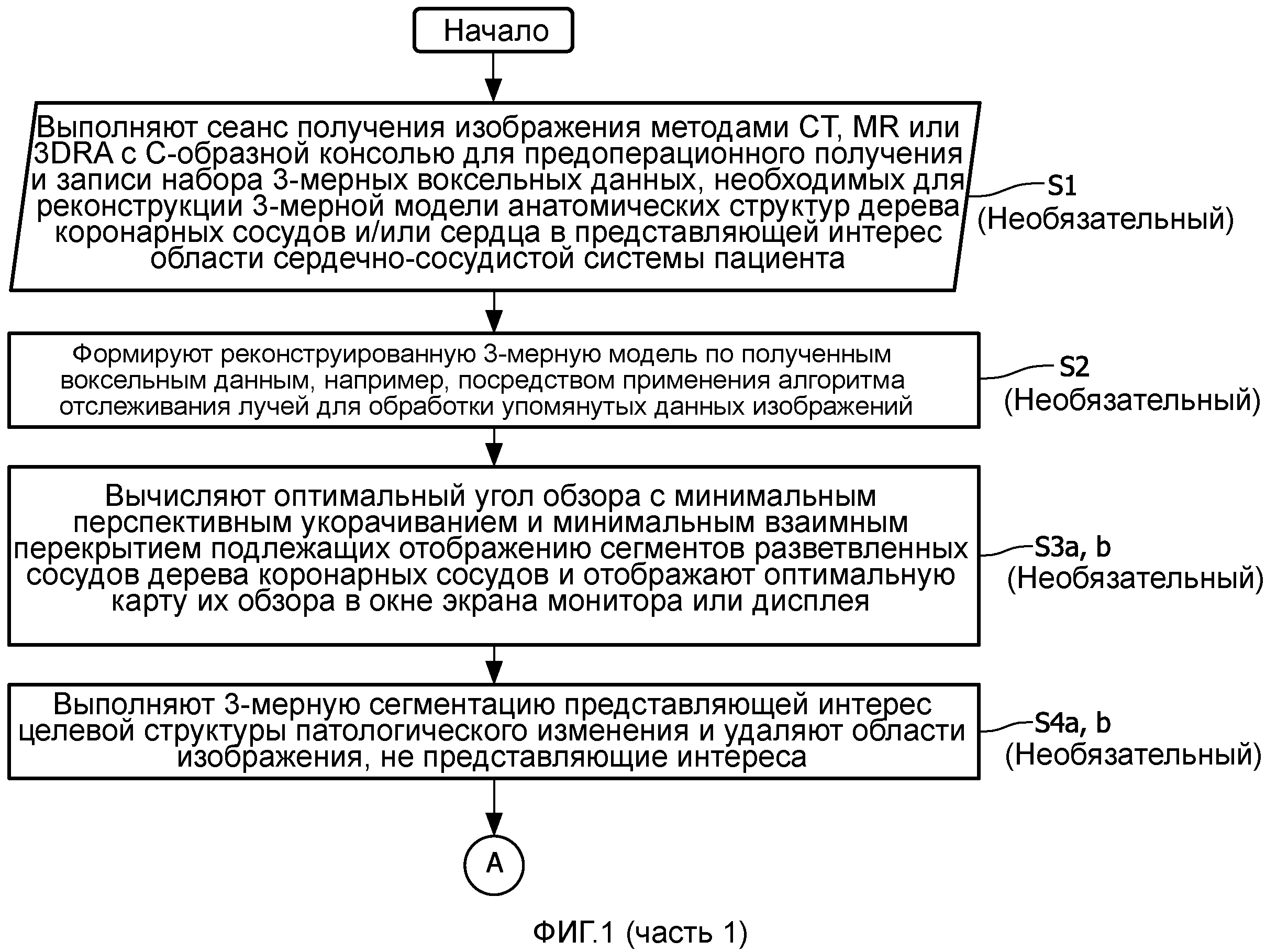
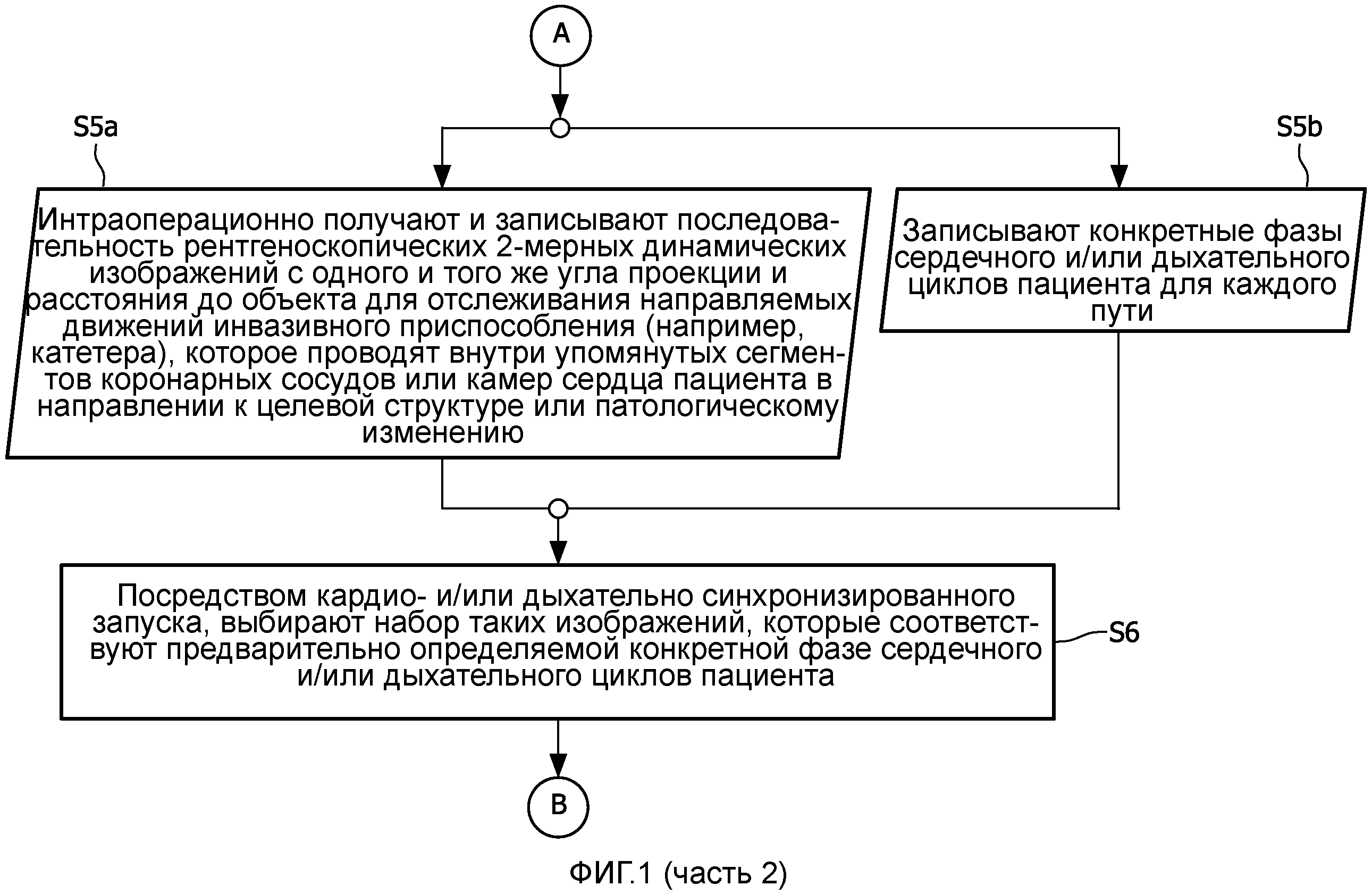
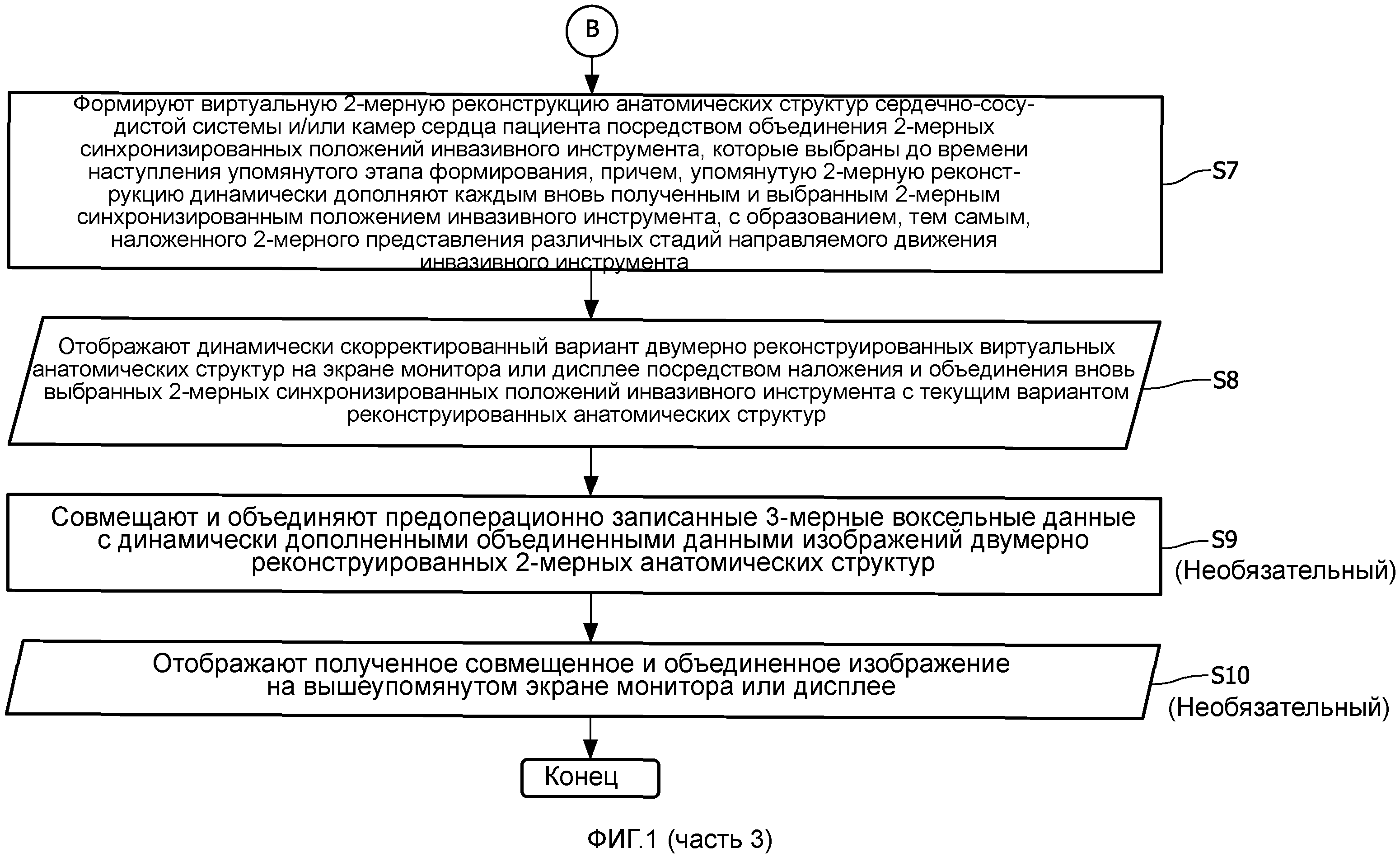
Фиг. 1 - блок-схема последовательности операций способа, которая поясняет предложенный способ получения изображений в соответствии с упомянутым первым примерным вариантом осуществления настоящего изобретения,
Фиг. 2 - изображение трехмерно реконструированной оптимальной карты обзора дерева левой коронарной артерии пациента с оптимального угла наблюдения, обеспечивающего минимальное перспективное укорачивание и минимальное перекрытие сосудов,
Фиг. 3a - вид сбоку в перспективе катетера для венечного синуса, известного из существующего уровня техники, который подлежит проведению через сегмент сосуда сердца,
Фиг. 3b - вид спереди катетера для венечного синуса, показанного на фиг. 3a,
Фиг. 4a-c - три последовательно записанных 2-мерных динамических изображения абляционного катетера и катетера LASSO, которые интраоперационно получают во время интервенционной кардиологической процедуры, при проведении сердечно-сосудистых катетеров в левое предсердие и в устья легочных вен, соответственно, и
Фиг. 5 - схематическая блок-схема системы визуализации в соответствии с упомянутым третьим примерным вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
В дальнейшем, предложенное устройство и способ получения изображений в соответствии с настоящим изобретением поясняются более подробно в отношении специальных усовершенствований и со ссылкой на прилагаемые чертежи.
Блок-схема, показанная на фиг. 1, изображает предложенный способ получения положений в соответствии с вышеописанным первым примерным вариантом осуществления настоящего изобретения. Как уже упоминалось выше, предложенный способ начинается с необязательного этапа выполнения сеанса получения изображения методами CT (компьютерной томографии), MR (магнитно-резонансной томографии), 3DRA (3-мерной поворотной ангиографии) с C-образной консолью или любым другим способом (ультразвуковым, сцинтиграфическим и т.п.), для предоперационного получения и записи (S1) набора 3-мерных воксельных данных, необходимых для реконструкции 3-мерной модели анатомических структур дерева коронарных сосудов и/или сердца в представляющей интерес области сердечно-сосудистой системы пациента, и, после упомянутого предоперационного этапа получения данных изображения, необязательного этапа формирования (S2) трехмерно реконструированной модели или 3-мерной карты сердечно-сосудистой системы пациента в представляющей интерес области, подлежащей исследованию и лечению посредством выполнения минимально инвазивного вмешательства по контролем рентгеновских изображений, например, цифровой реконструированной рентгенограммы (DRR), по полученным 3-мерным воксельным данным. Вышеописанный предоперационный этап реконструкции изображений может быть реализован, например, путем применения алгоритма отслеживания лучей для обработки предоперационно полученных 3-мерных воксельных данных. Затем, по желанию, можно обеспечить этап, на котором вычисляют (S3a) оптимальный угол наблюдения с минимальным перспективным укорачиванием и минимальным перекрытием сосудов для таких сегментов разветвленных сердечных сосудов дерева коронарных сосудов, которые подлежат отображению, чтобы на экране монитора или дисплея рабочей станции можно было отобразить (S3b) оптимальную карту обзора. Также по желанию, затем, данную оптимальную карту обзора можно обработать по алгоритму 3-мерной сегментации (S4), чтобы выявить контуры представляющей интерес целевой структуры или патологического изменения и приглушить яркость областей изображения, не представляющих интереса, которые не содержатся внутри сегментированных контуров упомянутой целевой структуры или патологического изменения, с последующим выполнением процесса фильтрации и усилением контраста, который применяют для обработки сегментированного изображения (не показанного). После этого, интраоперационно получают и записывают (S5a) последовательность 2-мерных динамических изображений, представляющих анатомические структуры сердечно-сосудистой системы и/или сердца пациента с одного и того же угла проекции и расстояния до объекта, для отслеживания направляемых движений инвазивного приспособления (например, катетера или проволочного направителя), которое проводят внутри упомянутых сегментов коронарных сосудов или камер сердца пациента в направлении к целевой структуре или патологическому изменению. Параллельно с получением 2-мерных динамических изображений, для каждого пути непрерывно записывают конкретные фазы сердечного и/или дыхательного циклов пациента (S5b). В настоящем изобретении предлагается выбирать (S6) набор таких интраоперационно полученных флюорограмм, которые соответствуют предварительно определяемой конкретной фазе сердечного и/или дыхательного циклов пациента посредством кардио- и/или дыхательного(ой) включения или синхронизации. После формирования (S7) виртуальной 2-мерной реконструкции анатомических структур сердечно-сосудистой системы и/или камер сердца пациента посредством объединения 2-мерных синхронизированных положений инвазивного инструмента, которые выбраны до времени наступления упомянутого этапа формирования, при этом упомянутую 2-мерную реконструкцию динамически дополняют каждым вновь полученным и выбранным 2-мерным синхронизированным положением инвазивного инструмента, с образованием, тем самым, наложенного 2-мерного представления различных стадий направляемого движения инвазивного инструмента, динамически скорректированный вариант двумерно реконструированных виртуальных анатомических структур отображают (S8) на экране монитора или дисплее посредством наложения и объединения вновь выбранных 2-мерных синхронизированных положений инвазивного инструмента с текущим вариантом реконструированных анатомических структур. Затем, предоперационно полученные и записанные 3-мерные воксельные данные сегментированной целевой структуры или патологического изменения можно, по желанию, совмещать и объединять (S9) с динамически дополняемыми объединенными данными двумерно восстановленных 2-мерных анатомических структур. Тем самым, процедура совмещения дает наилучшее согласование между упомянутой 3-мерной картой и реконструированными 2-мерными анатомическими структурами. И, наконец, совмещенное и объединенное изображение, которое получают на этапе S9, можно отображать (S10) на экране монитора или дисплее.
На фиг. 2 изображена трехмерная реконструированная оптимальная карта обзора, представляющая дерево левой коронарной артерии пациента с оптимального угла наблюдения, обеспечивающего минимальное перспективное укорачивание и минимальное перекрытие сосудов. Трехмерное восприятие можно получить, например, применением метода передачи объема, процедуры многоплоскостного преобразования или алгоритма отображения поверхностей с тенями для обработки набора ранее полученных 3-мерных воксельных данных.
На фиг. 3a и 3b приведены вид сбоку в перспективе и вид спереди катетера для венечного синуса (CSC), известного из патента US 5643231 A, который подлежит проведению по сегменту сосуда сердца. На дистальном конце катетера может располагаться множество электродов E, предпочтительно, по меньшей мере два, при этом один из упомянутых электродов расположен на наконечнике катетера. Таким образом, число электродов и их размещение на корпусе катетера зависит от предполагаемого применения катетера. Наибольшее число электродов может составлять, по меньшей мере, десять электродов. В случае, соответствующем предполагаемому применению, в катетере может быть также оборудован просвет для инфузии жидкостей или отбора образцов крови. Диаметр просвета должен быть достаточным для предполагаемого применения катетера. В показанном варианте осуществления, вблизи дистального наконечника катетера находится одно или множество отверстий V, при этом их точное местоположение и число зависят от предполагаемого применения катетера.
При операции, катетер для венечного синуса, показанный на фиг. 3a и 3b, содержит от двух до, приблизительно, десяти электродов, которые подсоединены к устройству для измерения электрофизиологических характеристик. Катетер чрескожно вводят через внутреннюю яремную вену или подключичную вену и проводят с рентгеновским наведением через верхнюю полую вену в правое предсердие. Введение возможно также с применением подхода через плечевую вену или бедренную вену по внутренней яремной вене. Затем, катетер для венечного синуса проводят через правое предсердие, пока он не придет в контакт с устьем коронарного синуса. Таким образом, конкретная конструкция и кривизна показанного катетера для венечного синуса облегчают процедуру локализации устья коронарного синуса. Сердечно-сосудистый катетер, с медиально направленным наконечником, продвигают под рентгеновским контролем к трехстворчатому клапану. Затем, наконечник катетера для венечного синуса вводят внутрь коронарного синуса и продвигают насколько требуется или желательно. После этого можно получать непрерывные и стабильные записи электрических путей, проходящих вблизи коронарного синуса. Кривизна катетера для венечного синуса помогает локализовать устье коронарного синуса и, кроме того, снимать электрофизиологические показания в пределах коронарного синуса. Таким образом можно сократить время и рентгеновское облучение, необходимое во время процедуры.
Кроме применения в качестве диагностического электрофизиологического катетера, катетер для венечного синуса можно также применять для других медицинских процедур внутри коронарного синуса. Например, при модификации режима применения для электродов катетера, типов медицинских инструментов, к которым прикрепляют проксимальный конец катетера, и электродов, катетер может также служить в качестве средства для интервенционной стимуляции или постоянной стимуляции сердца. Стимуляция с помощью катетера для венечного синуса будет также обеспечивать возможность стимуляции левого предсердия. Катетер для венечного синуса можно также применять с целью дефибрилляции или для кардиоверсии путем подачи контролируемого количества электрической энергии к сердцу, которое в данный момент испытывает аритмию. Кроме того, катетер можно также использовать для имплантации постоянного кардиостимулятора, при выполнении немногочисленных модификаций катетера.
Существуют также катетеры для выполнения абляции тканей (например, катетер, показанный на фиг. 4a-c). Данные катетеры часто подаются в левое предсердие целиком при фибрилляции предсердий (или в другую камеру сердца, в зависимости от заболевания, подлежащего лечению).
На фиг. 4a-c представлены три флебограммы коронарного синуса в форме трех последовательно записанных 2-мерных динамических изображений, которые интраоперационно получают во время интервенционной кардиологической процедуры. На изображениях представлены разные стадии проведения абляционного катетера и катетера LASSO в левое предсердие и в устья легочных вен, что позволяет отследить направляемые движения упомянутых инвазивных инструментов. В соответствии с настоящим изобретением, те пути сердечно-сосудистого катетера и, следовательно, те интраоперационно полученные 2-мерные динамические изображения, которые соответствуют некоторой сердечной и/или дыхательной фазе электрокардиограммы или респирограммы, которая(ые) записывается(ются) параллельно, во время получения флебограмм коронарного синуса, выбираются посредством кардио- и/или дыхательной синхронизации или включения, для совмещения и объединения с 3-мерными воксельными данными предоперационно сформированной оптимальной карты обзора, представляющей трехмерную реконструированную модель анатомических структур вен, впадающих в коронарный синус, под оптимальным углом наблюдения, при минимальном перспективном укорачивании и перекрытии сосудов.
Схематическая блок-схема системы 2 визуализации в соответствии с примерным вариантом осуществления настоящего изобретения, которая дает возможность сохранять, обрабатывать и визуализировать полученные данные изображений, показывающие анатомическую структуру или конкретную представляющую интерес область, патологические аномалии, инвазивные приспособления, кардиостимуляторы, стенты для ангиопластики или другие имплантаты в сегменте кровеносного сосуда сосудистой системы пациента на экране монитора рабочей станции 13, соединенной с упомянутой системой 2 визуализации, показана на фиг. 5. Данные изображений, например, могут предоставляться в форме интраоперационно получаемых 2-мерных рентгеновских изображений, данных изображений с передачей объема или предоперационно полученных 3-мерных воксельных данных, которые формируются и обеспечиваются устройством 1 получения изображений, например, системой магнитно-резонансной томографии (MRI), системой компьютерной томографии (CT) с поворотным гентри, устройством для 3-мерной поворотной ангиографии (3DRA) с C-образной консолью или любой другой системой получения 3-мерных изображений (ультразвуковой, сцинтиграфической и т.п.). Полученные данные 2-мерных и 3-мерных изображений можно визуализировать либо в разных окнах, либо в общем окне, представляющем объединенный вид цифровой реконструированной рентгенограммы, которая сформирована из предоперационно записанных 3-мерных воксельных данных и интраоперационно полученного 2-мерного изображения, которое было совмещено с упомянутой цифровой реконструированной рентгенограммой.
Как показано на фиг. 5, данные изображений, сформированные упомянутым устройством 1 получения изображений, подаются в систему 2 визуализации посредством интерфейса 6 ввода. Помимо блока 3 управления, который управляет обменом данными с устройством 1 получения изображений, упомянутая система 2 визуализации может содержать модуль 4 предварительной обработки, который может быть, в частности, оборудован цифровым фильтром для подавления шумов и усиления контраста. Инструментальное средство 5 обработки изображений, встроенное в упомянутую систему визуализации, может служить для формирования 3-мерных видов с передачей объема, изображений, с передачей теней на поверхностях (SSD), изображений с многоплоскостным преобразованием и/или цифровых реконструированных рентгенограмм, которые воспроизводятся на основе сформированных 3-мерных воксельных данных анатомической структуры или патологической аномалии в представляющей интерес области сердечно-сосудистой системы пациента, подлежащей исследованию и инвазивному лечению. Упомянутое инструментальное средство 5 обработки изображений может быть оборудовано инструментальным средством 5 для 2-мерного/3-мерного совмещения и объединения, предназначенным для определения параметров преобразования 2-мерного/3-мерного совмещения, применяемого для совмещения и объединения предоперационно сформированной трехмерной DRR (цифровой реконструированной рентгенограммы) (или карты оптимального обзора, которая сформирована из нее) с данными динамически дополненного объединенного изображения двумерно реконструированных 2-мерных анатомических структур, при этом, упомянутое изображение дополнительно представляет инвазивный инструмент или приспособление во время проведения по сегменту сосуда сердца изображенной сосудистой системы пациента. По желанию, упомянутое инструментальное средство 5 обработки изображений может быть дополнительно оснащено инструментальным средством сегментации (не показанным) для определения контуров целевой структуры или патологического изменения в пределах упомянутой представляющей интерес области. Инструментальное средство 5b визуализации, которое встроено в упомянутое инструментальное средство 5 обработки изображений, может служить для формирования и отображения объединенного изображения DRR (цифровой реконструированной рентгенограммы) и 2-мерного изображения после представления для упомянутого 2-мерного/3-мерного совмещения.
На фиг. 5 показано также, что данные изображений, которые сформированы устройством 1 получения изображений и поданы в систему 2 визуализации посредством интерфейса 6 ввода, могут временно или постоянно сохраняться в архиве данных изображений внешнего запоминающего устройства 12 посредством интерфейса вывода данных DATA OUT. Для визуализации, сохраненные данные изображений могут загружаться посредством интерфейса ввода данных, обозначенного «DATA IN» на фиг. 5, в локальное временное запоминающее устройство системы 2 визуализации (не показанное), с использованием, тем самым, стандартного формата данных (например, формата DICOM).
Для ретроспективной синхронизации по ЭКГ или дыханию, к выводу интерфейса вышеупомянутой системы 5 обработки изображений подсоединены электрокардиограф 9 и пояс 10 усилий дыхания. В альтернативном варианте, дыхательные движения могут отслеживаться и записываться другим средством, а не поясом усилий дыхания, например посредством отслеживания диафрагмы или трахеи в процессе рентгеноскопии, посредством отслеживания грудной клетки камерой и т.п. Аналогично, можно представить себе другое средство для записи сердечной фазы (иногда контур сердца наблюдается в процессе рентгеноскопии, или можно использовать перемещения катетера). В соответствии с настоящим изобретением, система обработки изображений выполнена с возможностью обеспечения запускающего сигнала для выбора таких изображений из последовательности 2-мерных динамических изображений, интраоперационно полученных для отслеживания направляемых движений инвазивного устройства, при его перемещении по разветвленным коронарным сосудам пациента, которые соответствуют некоторым сердечным и/или дыхательным фазам каждого пути, причем упомянутый запускающий сигнал получают из ЭКГ или респирограммы пациента, которую записывают параллельно во время минимально инвазивной интервенционной процедуры. Например, выбирают такие рентгенограммы, которые получены во время, когда в записанной электрокардиограмме появляется зарегистрированный зубец R (что, обычно, происходит во время диастолических фаз).
В соответствии с альтернативным вариантом вышеописанного варианта осуществления используют две независимо работающие системы получения изображений. Первую систему получения изображений используют для формирования в реальном времени 2-мерных рентгеновских изображений анатомической представляющей интерес области во время интервенционной процедуры. По желанию, из-за того, что данное средство не позволяет четко визуализировать сложные анатомические структуры мягких тканей, например, миокарда, можно применить вторую систему получения изображений, которая формирует реконструированные 3-мерные карты сердечно-сосудистых анатомических структур пациента из набора 3-мерных воксельных данных, предоперационно полученных по технологии CT (компьютерной томографии), 3DRA (3-мерной поворотной ангиографии), MRI (магнитно-резонансной томографии) или другой технологии. Во время интервенционной процедуры, инвазивный инструмент, например, сердечно-сосудистый катетер, проводят в представляющей интерес области через конкретные сегменты сосудов разветвленных вен сердца системы вен сердца (в случае установки вывода кардиостимулятора) или в направлении к левому предсердию (в случае процедуры лечения AF (фибрилляции предсердий)), тогда как другие процедуры могут потребовать проведения инвазивного инструмента упомянутого или другого типа к другим представляющим интерес областям.
Таким образом, настоящее изобретение может обеспечивать сегментирование и запись по времени путей инвазивного инструмента. Параллельно систему используют для синхронизации с дыхательным движением и движением сердца. Данную операцию можно выполнять специальными устройствами, например устройствами ЭКГ для кардиосинхронизации, поясом усилий дыхания для дыхательной синхронизации или посредством катетера для венечного синуса (CS) для обоих способов синхронизации. Альтернативные варианты синхронизации упоминались выше. Тем самым, информация о соответствующих фазах объединяется с записанными путями применяемого инвазивного инструмента.
Предлагаемая система отображает в реальном времени наложение упомянутых путей, которые соответствуют текущей дыхательной или сердечной фазе. Упомянутая дополнительная информация служит для визуализации и динамической коррекции анатомических структур сердца пациента в 2 измерениях и, тем самым, обеспечивает дополненное анатомией восприятие упомянутого направляемого движения, что помогает врачу визуализировать анатомическую представляющую интерес область в процессе выполнения кардиологической интервенционной процедуры. Следовательно, инвазивный инструмент можно перемещать для исследования анатомических структур вен, впадающих в коронарный синус, и для дополнения динамически реконструируемых виртуальных 2-мерных анатомических структур. После этого, предоперационно реконструированную 3-мерную карту или эндоскопическое изображение можно, по желанию, совмещать и объединять с динамически скорректированными данными изображения двумерно реконструированных 2-мерных анатомических структур, показывающих направляемые движения инвазивного инструмента, и дополнительно можно обеспечивать окрашивание упомянутых виртуальных анатомических структур для их отличия от анатомических структур и инвазивного инструмента, показываемых на интраоперационно получаемых 2-мерных динамических изображениях.
ПРИМЕНЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Настоящее изобретение можно эффективно применять в рамках минимально инвазивных хирургических вмешательств под визуальным контролем, когда полезно снижать дозу рентгеновского облучения, которой нагружают пациента, подлежащего интервенционному лечению, во время сеанса получения рентгенографического изображения, например, в рамках процедур радиочастотной абляции или установки кардиостимуляторов под рентгеновским контролем. Предложенные система и способ предназначены, в частности, для применения в медицинской рабочей станции или пульте оператора, в частности, в таких из них, которые предназначены для электрофизиологических процедур, например, в системе EP Navigator компании Philips.
Хотя настоящее изобретение подробно представлено на чертежах и охарактеризовано в вышеприведенном описании, упомянутые чертежи и описание следует считать наглядными или примерными, а не ограничивающими, что означает, что настоящее изобретение не ограничено описанными вариантами осуществления. Специалистами в данной области техники, при практическом применении заявленного изобретения, на основании анализа чертежей, описания и прилагаемой формулы изобретения, могут быть разработаны и реализованы другие варианты описанных вариантов осуществления. В формуле изобретения, выражение «содержащий» не исключает другие элементы или этапы, и использование единственного числа не исключает множественного числа. Единственный процессор или другой блок может выполнять функции нескольких компонентов, упомянутых в формуле изобретения. Очевидное обстоятельство, что разные признаки упомянуты во взаимно зависимых пунктах формулы изобретения, не означает, что, в подходящих случаях, нельзя использовать сочетание упомянутых признаков. Компьютерная программа может храниться/поставляться на подходящем носителе, например, оптическом носителе данных или полупроводниковом носителе, совместно с другими аппаратными средствами или в их составе, но может также поставляться в других формах, например, по сети Интернет или посредством других проводных или беспроводных телекоммуникационных систем. Кроме того, никакие позиции в формуле изобретения не подлежат истолкованию в смысле ограничения объема настоящего изобретения.
Реферат
Изобретение относится к области электрофизиологии сердца и, в частности, к процедурам радиочастотной абляции и установки кардиостимуляторов под визуальным контролем. Система обработки изображений, функционирующая в рабочей станции, снабженной также машиночитаемым носителем, выполнена с возможностью интраоперационного получения и записи последовательности 2-мерных флюорограмм с одного и того же угла проекции и расстояния до объекта, записи фаз сердечного и/или дыхательного циклов пациента, во время получения и записи 2-мерных флюорограмм, выбора набора таких 2-мерных флюорограмм, которые соответствуют конкретной фазе сердечного и/или дыхательного циклов пациента, посредством кардио- и/или дыхательной синхронизации, формирования 2-мерной реконструкции анатомических структур сердечно-сосудистой системы и/или камер сердца пациента посредством объединения наложенного поднабора 2-мерных положений инвазивного инструмента на 2-мерных флюорограммах на разных стадиях направляемого движения и отображения динамически скорректированного варианта 2-мерной реконструкции анатомических структур сердечно-сосудистой системы и/или камер сердца пациента на экране монитора или дисплее. Использование изобретения позволяет повысить точность визуализации двумерно реконструированных анатомических структур. 3 н. и 3 з.п. ф-лы, 5 ил.
Формула
- интраоперационного получения и записи последовательности 2-мерных флюорограмм с одного и того же угла проекции и расстояния до объекта, причем каждая из упомянутых 2-мерных флюорограмм показывает инвазивный инструмент во время разных стадий направляемого движения, причем система (5) обработки изображений запрограммирована для
- записи фаз сердечного и/или дыхательного циклов пациента, во время получения и записи 2-мерных флюорограмм,
- выбора набора таких 2-мерных флюорограмм, которые соответствуют конкретной фазе сердечного и/или дыхательного циклов пациента, посредством кардио- и/или дыхательной синхронизации, и
при выполнении упомянутого этапа выбора и дальнейшего проведения инвазивного инструмента,
- формирования 2-мерной реконструкции анатомических структур сердечно-сосудистой системы и/или камер сердца пациента посредством объединения наложенного поднабора 2-мерных положений инвазивного инструмента на 2-мерных флюорограммах на разных стадиях направляемого движения, причем упомянутый поднабор 2-мерных положений был выбран до времени упомянутого этапа формирования, причем упомянутая 2-мерная реконструкция динамически дополняется каждой вновь полученной и выбранной 2-мерной флюорограммой, с образованием, тем самым, наложенного 2-мерного представления различных стадий направляемого движения инвазивного инструмента, и
- отображения динамически скорректированного варианта 2-мерной реконструкции анатомических структур сердечно-сосудистой системы и/или камер сердца пациента на экране монитора или дисплее.
оснащенная
- инструментальным средством (5а) 2-мерного/3-мерного совмещения и объединения, предназначенным для совмещения и объединения набора 3-мерных вексельных данных, предоперационно полученных и записанных для реконструкции 3-мерной модели анатомических структур сердечно-сосудистой системы и/или камер сердца пациента, с данными изображений двумерной реконструкции, и
- инструментальным средством (5b) визуализации для отображения полученного совмещенного и объединенного изображения на экране монитора или дисплее.
для выполнения этапа реконструкции 3-мерной модели анатомических структур сердечно-сосудистой системы и/или камер сердца, причем упомянутая система выполнена с возможностью вычисления оптимального угла наблюдения с минимальным перспективным укорачиванием и минимальным перекрытием сосудов и с возможностью отображения оптимальной карты их обзора в окне, представляемом на экране монитора или дисплее.
дополнительно выполненная с возможностью выполнения 3-мерной сегментации представляющих интерес целевых структуры или патологического изменения и с возможностью приглушения яркости областей изображения, которые не содержатся внутри сегментированных контуров упомянутых целевых структуры или патологического изменения.
Комментарии