Гидравлический аппарат - RU2534642C2
Код документа: RU2534642C2
Чертежи










Описание
Область техники, к которой относится предлагаемое изобретение
Предлагаемое изобретение относится к гидравлическому аппарату для извлечения энергии из движения волн.
Уровень техники
Гидравлические аппараты для извлечения энергии из движения волн известны из предшествующего уровня техники. Примеры таких аппаратов раскрыты в относящихся к технологии СЕТО™ (СЕТО - товарный знак компании СЕТО IP Pty Ltd; представляет собой имя древнегреческой богини Кетó (Кητώ)) на английском языке - Ceto) опубликованных международных патентных заявках PCT/AU2006/001187 и PCT/AU2007/001685, которые включаются в данную заявку по ссылке.
Известный из предшествующего уровня техники гидравлический аппарат для извлечения энергии из движения волн содержит основание, которое размещается в водном пространстве на дне моря. На этом основании установлен осевой гидравлический насос с возможностью вращения относительно основания. Поршневой шток этого насоса соединен с плавучим активирующим элементом с помощью фала. В результате движения волн и благодаря положительной плавучести плавучего активирующего элемента последний следует за водными возмущениями, так что плавучий активирующий элемент вынуждается к приложению к фалу силы, направленной кверху, и выталкиванию текучей среды под давлением через односторонние клапаны в разветвленный трубопровод. При прохождении впадины волны плавучий активирующий элемент под действием веса поршня насоса и силы от входного давления насоса падает книзу, приводя насос в готовность к следующему толчку плавучего активирующего элемента кверху.
Такой аппарат сконструирован с обеспечением работы в режиме с обратной связью (то есть, является автоматически регулирующимся), когда текучая среда под высоким давлением с помощью гидравлического насоса перекачивается к берегу, энергия извлекается для совершения полезной работы, а текучая среда, давление которой упало, через трубопровод возвращается к находящемуся на некотором расстоянии от берега гидравлическому насосу для повторного приведения в действие.
Из предшествующего уровня техники известны и другие варианты гидравлического аппарата, один из которых подобен вышеописанному гидравлическому аппарату во всем, за исключением того, что он содержит совокупность гидравлических насосов и совокупность плавучих активирующих элементов, каждый из которых с помощью фала связан с поршневым штоком соответствующего насоса.
Известные из предшествующего уровня техники гидравлические аппараты, такие как описаны выше, обычно приспособлены к конкретному местоположению для работы в конкретных условиях, связанных с местоположением, в том числе, с характером волнения и приливными вариациями, связанными с данным местоположением. Обычно это связано с изготовлением нестандартного технического оборудования, которое специально сконструировано для использования в конкретном месте, а также с адаптацией этого технического оборудования к работе в конкретном режиме, подходящем для этого местоположения.
Необходимость в конструировании и изготовлении такого нестандартного технического оборудования означает, что процесс изготовления трудно рационализировать для достижения больших объемов производства при более низких затратах.
Предлагаемое изобретение создано для решения проблем и преодоления трудностей предшествующего уровня техники.
Краткое описание предлагаемого изобретения
Целью предлагаемого изобретения является устранение или, по меньшей мере, смягчение одного или более из вышеупомянутых недостатков предшествующего уровня техники или предоставление потребителю выбора с точки зрения полезности или экономичности.
Другие цели и преимущества предлагаемого изобретения будут ясны из дальнейшего описания со ссылками на прилагаемые чертежи, на которых в качестве примера проиллюстрирован один из предпочтительных вариантов осуществления предлагаемого изобретения.
Согласно первому широкому аспекту предлагаемого изобретения предусматривается создание автоматически регулирующегося гидравлического аппарата для преобразования энергии волн, содержащего:
насос для перекачивания через гидравлический аппарат текучей среды,
включающий корпус, образующий камеру, и
поршень, обеспечивающий разделение упомянутой камеры на рабочий отсек и глухой отсек,
плавучий активирующий элемент, соединенный с упомянутым поршнем,
впускное отверстие, сообщающееся с рабочим отсеком камеры с обеспечением для текучей среды возможности протекания от этого впускного отверстия в рабочий отсек камеры,
выпускное отверстие, сообщающееся с рабочим отсеком камеры с обеспечением для текучей среды возможности протекания из рабочего отсека камеры к этому выпускному отверстию, и
управляющее устройство, выполненное с возможностью управления работой насоса путем регулирования давления текучей среды у впускного отверстия и у выпускного отверстия с обеспечением оптимизации производительности насоса как реакции на приливно-отливные вариации и/или состояния моря, при этом регулирование давления текучей среды у впускного отверстия и у выпускного отверстия осуществлено в соответствии с управляющим алгоритмом, выбираемым из набора алгоритмов, генерируемых в соответствии с подходом оптимального фильтра, при этом оптимальный фильтр и управляющий алгоритм сгенерированы способом, включающим следующие стадии:
(i) определение матрицы мощности,
(ii) определение наиболее робастной спектральной модели для состояний моря, относящихся к физическому местоположению аппарата,
(iii) свертывание спектральной плотности состояния моря с упомянутой матрицей мощности для получения результирующей функции переноса,
(iv) осуществление мультипараметрической оптимизации функции мощности, полученной интегрированием упомянутой функции переноса по времени,
(v) определение рабочих точек и областей стабильной работы в векторном пространстве упомянутой функции мощности с целью генерирования эталонов,
(vi) применение управляющей системной функции переноса к переменным состояниям аппарата с целью генерирования управляющего алгоритма,
(vii) запуск модели упомянутого управляющего алгоритма с целью проверки точности и стабильности алгоритма и задающего эталона и
(viii) повторение стадий (i) и (ii) с разными состояниями моря при необходимости наполнения пространства требуемых управляющих алгоритмов.
Согласно одному из предпочтительных вариантов осуществления предлагаемого изобретения управляющее устройство содержит гидравлический аккумулятор на стороне входа, гидравлический аккумулятор на стороне выхода, впускной гидравлический регулирующий клапан, сообщенный с впускным отверстием и упомянутым гидравлическим аккумулятором на стороне входа,
выпускной гидравлический регулирующий клапан, сообщенный с выпускным отверстием и упомянутым гидравлическим аккумулятором на стороне выхода,
клапан, срабатывающий в определенной последовательности, сообщенный с впускным отверстием и с выпускным отверстием,
первый датчик выходного давления, соединенный с выпускным отверстием,
расходомер, соединенный с выпускным отверстием, пропорциональный дроссель, соединенный с упомянутым расходомером, и
второй датчик выходного давления, соединенный с упомянутым пропорциональным дросселем.
Согласно другому предпочтительному варианту осуществления предлагаемого изобретения управляющее устройство содержит:
гидравлический аккумулятор на стороне рабочего отсека, сообщенный с рабочим отсеком камеры,
гидравлический аккумулятор на стороне выхода, сообщенный с выпускным отверстием,
гидравлический аккумулятор на стороне входа, сообщенный с впускным отверстием,
выпускной клапан, сообщенный с выпускным отверстием,
впускной клапан, сообщенный с впускным отверстием,
клапан сброса давления, сообщенный с выпускным отверстием и впускным клапаном,
промежуточный гидравлический аккумулятор, сообщенный с впускным клапаном,
систему управления и
совокупность чувствительных элементов, при этом упомянутая система управления выполнена с возможностью управления выпускным клапаном и впускным клапаном в ответ на выходные сигналы от упомянутых чувствительных элементов.
Согласно еще одному предпочтительному варианту осуществления предлагаемого изобретения управляющее устройство содержит:
гидравлический аккумулятор на стороне рабочего отсека, сообщенный с рабочим отсеком камеры,
гидравлический аккумулятор на стороне выхода, сообщенный с выпускным отверстием,
гидравлический аккумулятор на стороне входа, сообщенный с впускным отверстием,
клапан сброса давления, сообщенный с выпускным отверстием и впускным отверстием,
выпускной клапан, сообщенный с выпускным отверстием,
впускной клапан, сообщенный с впускным отверстием, и
промежуточный гидравлический аккумулятор, сообщенный с впускным клапаном.
Представляется предпочтительным такое решение, при котором управляющее устройство содержит еще один клапан сброса давления, сообщенный с выпускным отверстием и впускным отверстием.
Кроме того, представляется предпочтительным также такое решение, при котором управляющее устройство содержит также систему управления и совокупность чувствительных элементов, при этом упомянутая система управления выполнена с возможностью управления выпускным клапаном, впускным клапаном и клапаном сброса давления в ответ на выходные сигналы от чувствительных элементов.
Кроме того, представляется предпочтительным также такое решение, при котором в составе упомянутой совокупности чувствительных элементов присутствуют чувствительные элементы давления, температуры и расхода текучей среды.
Кроме того, представляется предпочтительным также такое решение, при котором количество газа для дозаправки в линиях гидравлического аккумулятора на стороне рабочего отсека, гидравлического аккумулятора на стороне выхода, гидравлического аккумулятора на стороне входа и промежуточного гидравлического аккумулятора является варьируемым в соответствии с управляющим алгоритмом.
Кроме того, представляется предпочтительным также такое решение, при котором упомянутый выпускной клапан представляет собой игольчатый клапан для тангенциальной турбины.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат дополнительно содержит:
совокупность насосов для перекачивания текучей среды через гидравлический аппарат,
совокупность плавучих активирующих элементов, соединенных с поршнями упомянутых насосов,
совокупность впускных отверстий, соединенных с рабочими отсеками насосных камер, и
совокупность выпускных отверстий, соединенных с рабочими отсеками насосных камер,
а управляющее устройство содержит совокупность гидравлических аккумуляторов на стороне рабочего отсека, соединенных с рабочими отсеками насосных камер.
Кроме того, представляется предпочтительным также такое решение, при котором насосы упорядочены в матрицу, так что в погруженном состоянии находится не более трех рядов.
Кроме того, представляется предпочтительным также такое решение, при котором насосы идентичны.
Кроме того, представляется предпочтительным также такое решение, при котором управляющий алгоритм настроен на обеспечение максимальной интегрированной энергии.
Кроме того, представляется предпочтительным также такое решение, при котором стадию (i) повторяют также как часть стадии (viii), если набор или пространство управляющих алгоритмов содержит вариации по состоянию машины/аппарата.
Кроме того, представляется предпочтительным также такое решение, при котором оптимизация достигается выполнением следующих операций:
(i) определение матрицы мощности,
(ii) разработка и оптимизация управляющей системной функции переноса с использованием упомянутой матрицы мощности и волновой модели и
(iii) оптимизация упомянутой функции переноса для конкретного физического места с использованием робастной физической спектральной модели для этого физического места.
Согласно второму широкому аспекту предлагаемого изобретения предусматривается создание способа генерирования оптимального фильтра и набора управляющих алгоритмов для автоматически регулирующегося гидравлического аппарата для преобразования энергии волн, содержащего следующие стадии:
(i) определение матрицы мощности,
(ii) определение наиболее робастной спектральной модели для состояний моря применительно к физическому местоположению аппарата,
(iii) свертывание спектральной плотности состояния моря с упомянутой матрицей мощности для получения результирующей функции переноса,
(iv) осуществление мультипараметрической оптимизации функции мощности, полученной интегрированием упомянутой функции переноса по времени,
(v) определение рабочих точек и областей стабильной работы в векторном пространстве упомянутой функции мощности с целью генерирования эталонов,
(vi) применение управляющей системной функции переноса к переменным состояния аппарата с целью генерирования управляющего алгоритма,
(vii) запуск модели упомянутого управляющего алгоритма с целью проверки точности и стабильности алгоритма и задающего эталона и
(viii) при необходимости повторение стадий (i) и (ii) с разными состояниями моря с целью наполнения пространства требуемых управляющих алгоритмов.
Представляется предпочтительным такое решение, при котором стадию (i) повторяют так же, как часть стадии (viii), если набор или пространство управляющих алгоритмов содержит вариации по состоянию машины/аппарата.
Кроме того, представляется предпочтительным также такое решение, при котором управляющие алгоритмы являются эвристическими.
Кроме того, представляется предпочтительным также такое решение, при котором оптимизация достигается выполнением следующих операций:
(i) определение матрицы мощности,
(ii) разработка и оптимизация управляющей системной функции переноса с использованием упомянутой матрицы мощности и волновой модели и
(iii) оптимизация упомянутой функции переноса для конкретного физического места с использованием робастной физической спектральной модели для этого физического места.
Кроме того, представляется предпочтительным также такое решение, при котором автоматически регулирующийся гидравлический аппарат для преобразования энергии волн представляет собой гидравлический аппарат согласно первому широкому аспекту предлагаемого изобретения.
Согласно третьему широкому аспекту предлагаемого изобретения предусматривается создание способа управления гидравлическим аппаратом согласно первому широкому аспекту предлагаемого изобретения.
Согласно четвертому широкому аспекту предлагаемого изобретения предусматривается создание способа получения оптимального фильтра для управления гидравлическим аппаратом согласно первому широкому аспекту предлагаемого изобретения.
Согласно пятому широкому аспекту предлагаемого изобретения предусматривается создание гидравлического аппарата, содержащего насос для перекачивания через аппарат текучей среды и управляющий орган для управления потоком текучей среды.
Согласно шестому широкому аспекту предлагаемого изобретения предусматривается создание способа управления гидравлическим аппаратом согласно пятому широкому аспекту предлагаемого изобретения, содержащего следующие стадии:
приведение в действие насоса гидравлического аппарата для перекачивания через аппарат гидравлической текучей среды и
управление упомянутым управляющим органом таким образом, что обеспечивается управление потоком текучей среды.
Представляется предпочтительным такое решение, при котором упомянутый насос представляет собой аксиальный гидравлический насос.
Кроме того, представляется предпочтительным такое решение, при котором упомянутый управляющий орган - это выпускной клапан, впускной клапан, гидравлический аккумулятор и/или клапан сброса давления.
Кроме того, представляется предпочтительным такое решение, при котором гидравлический аппарат содержит также выпускной обратный клапан.
Кроме того, представляется предпочтительным такое решение, при котором гидравлический аппарат содержит также впускной обратный клапан.
Кроме того, представляется предпочтительным такое решение, при котором гидравлический аппарат содержит также гидравлический аккумулятор штока/настройки/рабочего отсека.
Кроме того, представляется предпочтительным такое решение, при котором гидравлический аппарат содержит также гидравлический аккумулятор на стороне глухого отсека.
Кроме того, представляется предпочтительным такое решение, при котором гидравлический аппарат содержит также гидравлический аккумулятор на стороне выхода.
Кроме того, представляется предпочтительным такое решение, при котором гидравлический аппарат содержит также гидравлический аккумулятор на стороне входа.
Кроме того, представляется предпочтительным такое решение, при котором гидравлический аппарат содержит также чувствительный элемент.
Кроме того, представляется предпочтительным такое решение, при котором гидравлический аппарат содержит также управляющее устройство.
Кроме того, представляется предпочтительным такое решение, при котором гидравлический аппарат является автоматически регулирующимся.
Кроме того, представляется предпочтительным такое решение, при котором гидравлический аппарат предназначен для извлечения энергии из движения волн / преобразования энергии волн.
Согласно седьмому широкому аспекту предлагаемого изобретения предусматривается создание системы управления устройством, работающим на энергии волн, и его оптимизации, содержащей следующие компоненты:
преобразователь энергии волн, использующий преобразователь энергии волн с подъемом гидравлической мощности, при этом работа упомянутого преобразователя энергии волн обеспечивается в режиме с обратной связью, при этом контур обратной связи содержит выпускную линию, находящуюся под повышенным давлением, и линию впуска текучей среды, находящуюся под существенно более низким давлением, при этом циркулирующая в контуре обратной связи текучая среда имеет водную основу, с помощью текучей среды обеспечивается перенос энергии к берегу, при этом перенос энергии текучей средой осуществляется посредством давления и потока, и
средство для переноса энергии от рабочего агента на берег с помощью гидромеханического устройства, такого как турбина или обменный двигатель давления.
Представляется предпочтительным такое решение, при котором предлагаемая система содержит управляющие органы, располагающиеся как на берегу, так и в море.
Кроме того, представляется предпочтительным такое решение, при котором в состав упомянутых управляющих органов входят:
клапаны, регулирующие давление и расход текучей среды в выпускной линии и впускных линиях на берегу,
находящийся в море клапан сброса давления, расположенный между упомянутыми впускной и выпускной линиями,
гидравлические аккумуляторы, расположенные в море, и гидравлические аккумуляторы, расположенные на берегу, один из которых соединен с упомянутой выпускной линией, а другой соединен с упомянутой впускной линией, и
клапан сброса давления, расположенный на берегу между впускной и выпускной линиями.
Кроме того, представляется предпочтительным такое решение, при котором для управления упомянутой совокупностью гидравлических клапанов и загрузок находящегося под давлением газа в аккумуляторах используется управляющий алгоритм.
Согласно восьмому широкому аспекту предлагаемого изобретения предусматривается создание управляющего алгоритма для системы согласно пятому широкому аспекту предлагаемого изобретения.
Представляется предпочтительным такое решение, при котором упомянутый управляющий алгоритм создан с возможностью выполнения одной или большего количества следующих функций или имеет одно или большее количество следующих свойств:
a) настраивает механическую жесткость путем варьирования объема гидравлического аккумулятора (открытие/закрытие клапанов) преобразователя энергии волн по технологии СЕТО™ WEC (аббревиатура от wave energy converter - преобразователь энергии волн) в том числе между двумя крайними состояниями поршня - зажатым и свободным. Под крайним зажатым состоянием поршня здесь понимается такое положение, при котором поршень имеет минимальную возможность движения по причине того, что гидравлическая текучая среда ограничена в движении внутри гидравлической цепи до такой степени, которую позволяет настроечный гидравлический аккумулятор, а под крайним свободным состоянием поршня здесь понимается такое положение, при котором имеет место свободное протекание текучей среды между впускной и выпускной цепями, и поршень имеет возможность перемещаться под действием собственного веса и приложенной к нему внешней силы;
b) настраивает эталонное положение поршня насоса при использовании технологии СЕТО™ для аккомодации медленных вариаций глубины воды, которые имеют место при приливах и отливах;
c) настраивает управляющие органы преобразователя энергии волн в режиме реального времени в соответствии с входными сигналами от находящегося поблизости аппарата для измерения волн. Такой аппарат выполнен с возможностью регистрации мгновенных значений высоты волны (Н), периода волны (Т), протяженности волны (0) и других релевантных параметров, которыми определяется состояние моря, и которые могут предоставить для алгоритма эту информацию в режиме реального времени;
d) настраивает установки в операции, описанной в пункте с) таким образом, что мощность Р имеет мгновенный максимум;
e) настраивает установки в операции, описанной в пункте с) таким образом, что мощность Р имеет мгновенный минимум;
f) настраивает установки в операции, описанной в пункте с) таким образом, что мощность Р превосходит некоторую.минимальную величину Рmс вероятностью рm;
g) применяет предварительно установленный шаблон F для ограничения значений параметров управляющих органов, что максимизирует общую мощность, обеспечиваемую преобразователем энергии волн в течение промежутка времени τ;
h) период τε варьирования упомянутого промежутка времени τ может составлять величину от секунд до минут и часов;
i) каждый период τε связан с уникальным шаблоном Fε, который определяет стационарную рабочую точку и диапазон для управления, осуществляемого управляющим алгоритмом А;
j) управляющий алгоритм А может содержать ряд шаблонов Fε, упоминаемых в пункте i), так что каждый шаблон воздействует таким образом, что в любой период от самого короткого до самого долгого обеспечивается оптимальный выход энергии Еmах- То есть, управляющий алгоритм А постоянно настроен на обеспечение максимальной общей энергии Еmах, где
k) конкретный управляющий алгоритм А может также быть выведен из набора управляющих алгоритмов Аi, где набор Аi содержит элементы, специфические для одного или большего количества из следующих условий:
i) конкретное географическое положение;
ii) конкретная глубина воды и батиметрия;
iii) конкретная характеристика волновой активности, например, энергичная, внебереговая, слабая, прибрежная или их комбинация;
iv) конкретное время года, например, зима, лето;
v) конкретное исполнение преобразователя энергии волн;
vi) конкретное физическое исполнение преобразователя энергии волн, в том числе механизм высвобождения энергии, как описано в совместно рассматриваемых патентных заявках компании СЕТО IP Pry Ltd;
vii) конкретное физическое состояние преобразователя энергии волн, соответствующее возрасту, состоянию, рабочей биографии преобразователя энергии волн;
viii) любые другие вариации в исполнении преобразователя энергии волн;
ix) доминирующие состояния моря в течение года. Например, одно место около острова Гарден-Айленд у берегов Западной Австралии имеет от шести до восьми доминирующих состояний моря;
x) конкретные условия безопасности/аварийности.
Согласно девятому широкому аспекту предлагаемого изобретения предусматривается создание системы, содержащей упорядоченную совокупность преобразователей энергии волн, соединенных вместе параллельно общей совокупности впускных и выпускных трубопроводов с образованием системы согласно любому из следующих широких аспектов предлагаемого изобретения: седьмому или восьмому.
Согласно десятому широкому аспекту предлагаемого изобретения предусматривается создание системы согласно девятому широкому аспекту предлагаемого изобретения, в которой управляющий алгоритм А чувствителен также к протяженности волны. Управляющие алгоритмы Аi- и шаблоны Fε материально отличаются от таковых преобразователя энергии волн. Следует заметить, что в случае множественных единиц по сравнению со случаем одной единицы разница в алгоритме обусловливается гидравлическим взаимодействием единиц.
Согласно одиннадцатому широкому аспекту предлагаемого изобретения предусматривается создание системы согласно любому из следующих широких аспектов предлагаемого изобретения: от седьмого до десятого, при этом управляющие алгоритмы Аi генерируются в соответствии с подходом оптимального фильтра.
Согласно двенадцатому широкому аспекту предлагаемого изобретения предусматривается создание гидравлического аппарата, содержащего
гидравлический насос, имеющий корпус, образующий камеру, и поршень, обеспечивающий разделение упомянутой камеры на рабочий отсек и глухой отсек, и
гидравлический аккумулятор на стороне глухого отсека камеры, сообщенный с упомянутым глухим отсеком камеры.
Представляется предпочтительным также такое решение, при котором упомянутый гидравлический аккумулятор на стороне глухого отсека камеры соединен в параллель с глухим отсеком камеры. Согласно альтернативным вариантам осуществления предлагаемого изобретения гидравлический аккумулятор на стороне глухого отсека камеры соединен с глухим отсеком камеры последовательно. Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аккумулятор на стороне глухого отсека камеры содержит также закрытую гидравлическую цепь глухого отсека камеры, которая содержит упомянутый гидравлический аккумулятор на стороне глухого отсека камеры и глухой отсек камеры.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также текучую среду, способную протекать между гидравлическим аккумулятором на стороне глухого отсека камеры и глухим отсеком камеры. Кроме того, представляется предпочтительным также такое решение, при котором упомянутая текучая среда обладает высокой смазывающей способностью. Кроме того, представляется предпочтительным также такое решение, при котором упомянутая текучая среда обладает низкой вязкостью.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также механический демпфер на стороне глухого отсека камеры, прикрепленный к поршню. Кроме того, представляется предпочтительным также такое решение, при котором упомянутый механический демпфер на стороне глухого отсека камеры выполнен из эластичного материала. Согласно альтернативным вариантам осуществления предлагаемого изобретения упомянутый механический демпфер на стороне глухого отсека камеры выполнен в виде пружины.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также механический демпфер на стороне рабочего отсека камеры, прикрепленный к поршню. Кроме того, представляется предпочтительным также такое решение, при котором упомянутый механический демпфер на стороне рабочего отсека камеры выполнен из эластичного материала. Согласно альтернативным вариантам осуществления предлагаемого изобретения упомянутый механический демпфер на стороне рабочего отсека камеры выполнен в виде пружины.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также гидравлический аккумулятор на стороне рабочего отсека камеры, сообщенный с рабочим отсеком камеры. Кроме того, представляется предпочтительным также такое решение, при котором упомянутый гидравлический аккумулятор на стороне рабочего отсека камеры соединен параллельно с рабочим отсеком камеры. Согласно альтернативным вариантам осуществления предлагаемого изобретения гидравлический аккумулятор на стороне рабочего отсека камеры соединен с рабочим отсеком камеры последовательно.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также выпускной обратный клапан, сообщенный с рабочим отсеком камеры, и впускной обратный клапан, соединенный параллельно с упомянутым выпускным обратным клапаном. Согласно некоторым вариантам осуществления предлагаемого изобретения упомянутый впускной обратный клапан сообщен с глухим отсеком камеры. Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также гидравлический аккумулятор на стороне выхода, соединенный параллельно с упомянутым выпускным обратным клапаном. Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также гидравлический аккумулятор на стороне входа, соединенный параллельно с упомянутым впускным обратным клапаном.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также сопрягающий гидравлический узел, содержащий выпускной обратный клапан, впускной обратный клапан, гидравлический аккумулятор на стороне выхода и гидравлический аккумулятор на стороне входа. Кроме того, представляется предпочтительным также такое решение, при котором упомянутый сопрягающий гидравлический узел содержит также гидравлический аккумулятор на стороне глухого отсека камеры. Кроме того, представляется предпочтительным также такое решение, при котором упомянутый сопрягающий гидравлический узел содержит также гидравлический аккумулятор на стороне рабочего отсека камеры. Кроме того, представляется предпочтительным также такое решение, при котором упомянутый сопрягающий гидравлический узел содержит также клапан сброса давления.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также гидравлический контроллер, соединенный с выпускным обратным клапаном и впускным обратным клапаном. Кроме того, представляется предпочтительным также такое решение, при котором упомянутое гидравлическое управляющее устройство содержит клапан сброса давления. Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также трубопровод высокого давления, соединяющий гидравлическое управляющее устройство с выпускным обратным клапаном, и трубопровод низкого давления, соединяющий гидравлическое управляющее устройство с впускным обратным клапаном. Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также гидравлическую нагрузку, соединенную с гидравлическим управляющим устройством.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат является автоматически регулирующимся.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат предназначен для извлечения энергии из движения волн / преобразования энергии волн. В одном из особо предпочтительных вариантов осуществления предлагаемого изобретения гидравлический аппарат содержит также плавучий активирующий элемент, который соединен фалом с поршнем.
Согласно тринадцатому широкому аспекту предлагаемого изобретения предусматривается создание гидравлического аппарата, содержащего
гидравлический насос, имеющий корпус, образующий камеру, и поршень, обеспечивающий разделение упомянутой камеры на рабочий отсек и глухой отсек, и
гидравлический аккумулятор на стороне рабочего отсека камеры, сообщенный с упомянутым рабочим отсеком камеры.
Представляется предпочтительным также такое решение, при котором упомянутый гидравлический аккумулятор на стороне рабочего отсека камеры соединен параллельно с рабочим отсеком камеры. Согласно альтернативным вариантам осуществления предлагаемого изобретения гидравлический аккумулятор рабочего отсека на стороне камеры соединен с рабочим отсеком камеры последовательно.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также механический демпфер на стороне рабочего отсека камеры, прикрепленный к поршню. Кроме того, представляется предпочтительным также такое решение, при котором упомянутый механический демпфер на стороне рабочего отсека камеры выполнен из эластичного материала. Согласно альтернативным вариантам осуществления предлагаемого изобретения упомянутый механический демпфер на стороне рабочего отсека камеры выполнен в виде пружины.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также механический демпфер на стороне глухого отсека камеры, прикрепленный к поршню. Кроме того, представляется предпочтительным также такое решение, при котором упомянутый механический демпфер на стороне глухого отсека камеры выполнен из эластичного материала. Согласно альтернативным вариантам осуществления предлагаемого изобретения упомянутый механический демпфер на стороне глухого отсека камеры выполнен в виде пружины.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также гидравлический аккумулятор на стороне глухого отсека камеры, сообщенный с глухим отсеком камеры. Кроме того, представляется предпочтительном также такое решение, при котором упомянутый гидравлический аккумулятор на стороне глухого отсека камеры соединен параллельно с глухим отсеком камеры. Согласно альтернативным вариантам осуществления предлагаемого изобретения гидравлический аккумулятор на стороне глухого отсека камеры соединен с глухим отсеком камеры последовательно. Кроме того, представляется предпочтительном также такое решение, при котором гидравлический аппарат содержит также закрытую гидравлическую цепь глухого отсека камеры, содержащую гидравлический аккумулятор на стороне глухого отсека камеры и глухой отсек камеры.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также текучую среду, способную протекать между гидравлическим аккумулятором на стороне глухого отсека камеры и глухим отсеком камеры. Кроме того, представляется предпочтительным также такое решение, при котором упомянутая текучая среда обладает высокой смазывающей способностью. Кроме того, представляется предпочтительным также такое решение, при котором упомянутая текучая среда обладает низкой вязкостью.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также выпускной обратный клапан, сообщенный с рабочим отсеком камеры, и впускной обратный клапан, соединенный параллельно с упомянутым выпускным обратным клапаном. Согласно некоторым вариантам осуществления предлагаемого изобретения упомянутый впускной обратный клапан сообщен с глухим отсеком камеры. Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также гидравлический аккумулятор на стороне выхода, соединенный параллельно с упомянутым выпускным обратным клапаном. Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также гидравлический аккумулятор на стороне входа, соединенный параллельно с упомянутым впускным обратным клапаном.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также сопрягающий гидравлический узел, содержащий выпускной обратный клапан, впускной обратный клапан, гидравлический аккумулятор на стороне выхода и гидравлический аккумулятор на стороне входа. Кроме того, представляется предпочтительным также такое решение, при котором упомянутый сопрягающий гидравлический узел содержит также гидравлический аккумулятор на стороне глухого отсека камеры. Кроме того, представляется предпочтительным также такое решение, при котором упомянутый сопрягающий гидравлический узел содержит также гидравлический аккумулятор рабочего отсека на стороне камеры. Кроме того, представляется предпочтительным также такое решение, при котором упомянутый сопрягающий гидравлический узел содержит также клапан сброса давления.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также гидравлический контроллер, соединенный с выпускным обратным клапаном и впускным обратным клапаном. Кроме того, представляется предпочтительным также такое решение, при котором упомянутое гидравлическое управляющее устройство содержит клапан сброса давления. Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также трубопровод высокого давления, соединяющий гидравлическое управляющее устройство с выпускным обратным клапаном, и трубопровод низкого давления, соединяющий гидравлическое управляющее устройство с впускным обратным клапаном. Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также гидравлическую нагрузку, соединенную с гидравлическим управляющим устройством.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат является автоматически регулирующимся.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат предназначен для извлечения энергии из движения волн / преобразования энергии волн. В одном из особо предпочтительных вариантов осуществления предлагаемого изобретения гидравлический аппарат содержит также плавучий активирующий элемент, соединенный фалом с поршнем.
Согласно четырнадцатому широкому аспекту предлагаемого изобретения предусматривается создание гидравлического аппарата, содержащего гидравлический насос для обеспечения циркуляции через гидравлический аппарат текучей среды, и гидравлическое управляющее устройство для управления гидравлическим аппаратом.
Представляется предпочтительным также такое решение, при котором упомянутый гидравлический насос содержит корпус, образующий камеру, и поршень, обеспечивающий разделение упомянутой камеры на рабочий отсек и глухой отсек.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит гидравлический аккумулятор на стороне глухого отсека камеры, сообщенный с глухим отсеком камеры. Кроме того, представляется предпочтительным также такое решение, при котором упомянутый гидравлический аккумулятор на стороне глухого отсека камеры соединен параллельно с глухим отсеком камеры. Согласно альтернативным вариантам осуществления предлагаемого изобретения гидравлический аккумулятор на стороне глухого отсека камеры соединен с глухим отсеком камеры последовательно. Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат на стороне глухого отсека камеры содержит также закрытую гидравлическую цепь глухого отсека камеры, которая содержит упомянутый гидравлический аккумулятор на стороне глухого отсека камеры и глухой отсек камеры.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также текучую среду, способную протекать между гидравлическим аккумулятором на стороне глухого отсека камеры и глухим отсеком камеры. Кроме того, представляется предпочтительным также такое решение, при котором упомянутая текучая среда обладает высокой смазывающей способностью. Кроме того, представляется предпочтительным также такое решение, при котором упомянутая текучая среда обладает низкой вязкостью.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также механический демпфер на стороне глухого отсека камеры, прикрепленный к поршню. Кроме того, представляется предпочтительным также такое решение, при котором упомянутый механический демпфер на стороне глухого отсека камеры выполнен из эластичного материала. Согласно альтернативным вариантам осуществления предлагаемого изобретения упомянутый механический демпфер на стороне глухого отсека камеры выполнен в виде пружины.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также механический демпфер на стороне рабочего отсека камеры, прикрепленный к поршню. Кроме того, представляется предпочтительным также такое решение, при котором упомянутый механический демпфер на стороне рабочего отсека камеры выполнен из эластичного материала. Согласно альтернативным вариантам осуществления предлагаемого изобретения упомянутый механический демпфер на стороне рабочего отсека камеры выполнен в виде пружины.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также гидравлический аккумулятор на стороне рабочего отсека камеры, сообщенный с рабочим отсеком камеры. Кроме того, представляется предпочтительным также такое решение, при котором упомянутый гидравлический аккумулятор на стороне рабочего отсека камеры соединен параллельно с рабочим отсеком камеры. Согласно альтернативным вариантам осуществления предлагаемого изобретения гидравлический аккумулятор на стороне рабочего отсека камеры соединен с рабочим отсеком камеры последовательно.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также выпускной обратный клапан, сообщенный с рабочим отсеком камеры, и впускной обратный клапан, соединенный параллельно с упомянутым выпускным обратным клапаном. Согласно некоторым вариантам осуществления предлагаемого изобретения упомянутый впускной обратный клапан сообщен с глухим отсеком камеры. Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также гидравлический аккумулятор на стороне выхода, соединенный параллельно с упомянутым выпускным обратным клапаном. Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также гидравлический аккумулятор на стороне входа, соединенный параллельно с упомянутым впускным обратным клапаном.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также сопрягающий гидравлический узел, содержащий выпускной обратный клапан, впускной обратный клапан, гидравлический аккумулятор на стороне выхода и гидравлический аккумулятор на стороне входа. Кроме того, представляется предпочтительным также такое решение, при котором упомянутый сопрягающий гидравлический узел содержит также гидравлический аккумулятор на стороне глухого отсека камеры. Кроме того, представляется предпочтительным также такое решение, при котором упомянутый сопрягающий гидравлический узел содержит также гидравлический аккумулятор на стороне рабочего отсека камеры.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлическое управляющее устройство выполнено с возможностью управления гидравлическим аппаратом в соответствии с некоторым алгоритмом.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлическое управляющее устройство соединено с выпускным обратным клапаном и впускным обратным клапаном. Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также трубопровод высокого давления, соединяющий гидравлическое управляющее устройство с выпускным обратным клапаном, и трубопровод низкого давления, соединяющий гидравлическое управляющее устройство с впускным обратным клапаном.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат содержит также гидравлическую нагрузку. Кроме того, представляется предпочтительным также такое решение, при котором упомянутая нагрузка содержит турбину. Кроме того, представляется предпочтительным также такое решение, при котором упомянутая турбина представляет собой тангенциальную турбину.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат является автоматически регулирующимся.
Кроме того, представляется предпочтительным также такое решение, при котором гидравлический аппарат предназначен для извлечения энергии из движения волн / преобразования энергии волн. В одном из особо предпочтительных вариантов осуществления предлагаемого изобретения гидравлический аппарат содержит также плавучий активирующий элемент, соединенный фалом с поршнем.
Краткое описание прилагаемых чертежей
В целях обеспечения более полного понимания и чтобы способствовать практическому осуществлению предлагаемого изобретения далее один из предпочтительных вариантов его осуществления будет описан со ссылками на прилагаемые чертежи.
На фиг.1 схематично изображен гидравлический аппарат согласно первому предпочтительному варианту осуществления предлагаемого изобретения.
На фиг.2 схематично изображен гидравлический аппарат согласно второму предпочтительному варианту осуществления предлагаемого изобретения.
На фиг.3 схематично более детально показана часть гидравлического аппарата, проиллюстрированного на фиг.1 и фиг.2, при этом на виде сбоку в разрезе показан также аксиальный гидравлический насос.
На фиг.4 схематично изображен гидравлический аппарат согласно третьему предпочтительному варианту осуществления предлагаемого изобретения, при этом на виде сбоку в разрезе показан также аксиальный гидравлический насос.
На фиг.5 на виде сбоку в разрезе схематично показан гидравлический аппарат согласно четвертому предпочтительному варианту осуществления предлагаемого изобретения.
На фиг.6 схематично изображен гидравлический аппарат согласно пятому предпочтительному варианту осуществления предлагаемого изобретения, при этом на виде сбоку в разрезе показан также аксиальный гидравлический насос.
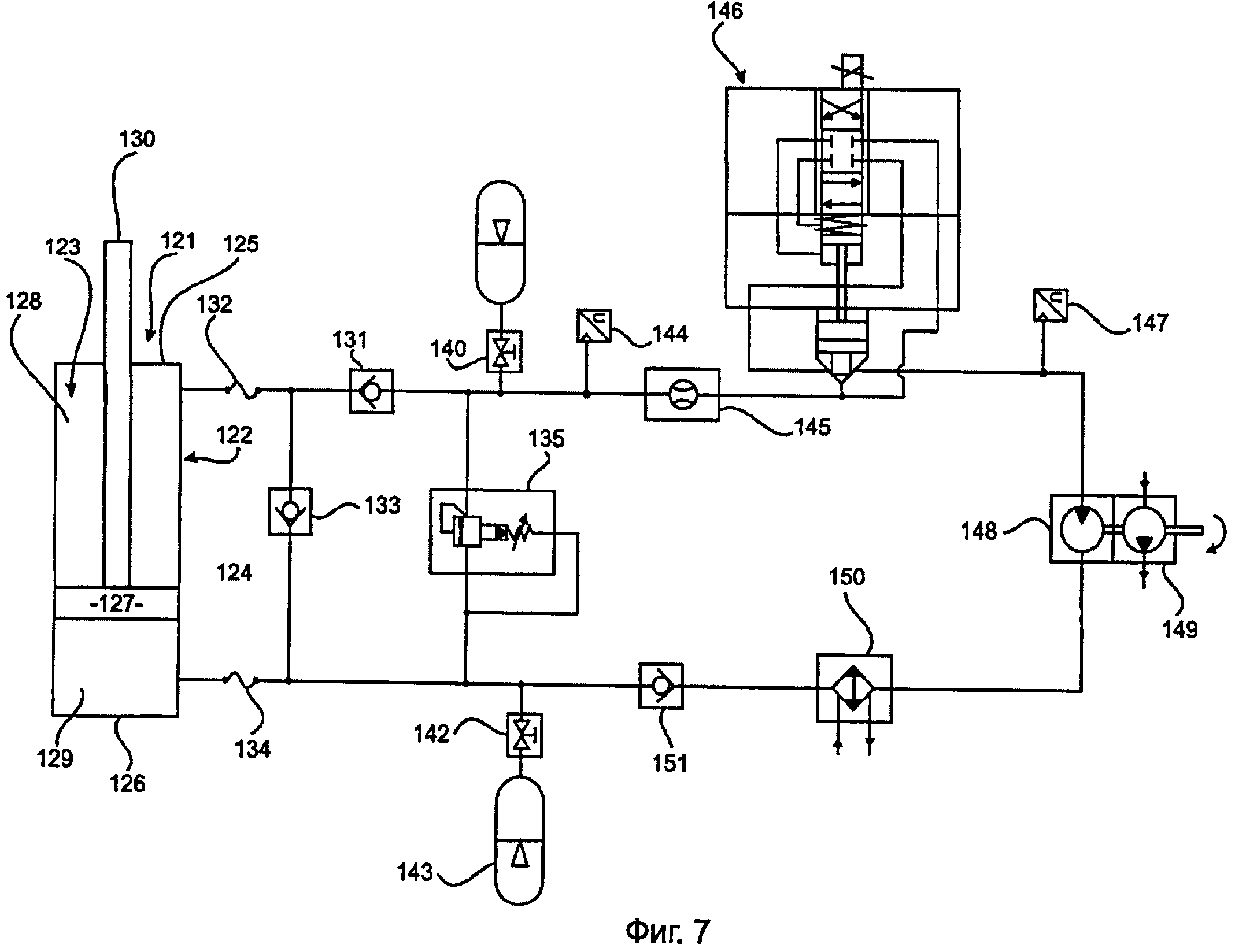
На фиг.7 схематично изображен гидравлический аппарат согласно шестому предпочтительному варианту осуществления предлагаемого изобретения, при этом на виде сбоку в разрезе показан также аксиальный гидравлический насос.
На фиг.8 схематично изображен гидравлический аппарат согласно седьмому предпочтительному варианту осуществления предлагаемого изобретения, при этом на виде сбоку в разрезе показан также аксиальный гидравлический насос.
На фиг.9 схематично изображена система инструментального управления и система зарядки батарей гидравлического аппарата, изображенного на фиг.8.
На фиг.10 представлена диаграмма, иллюстрирующая диапазон перемещения поршня гидравлического аппарата, такого как аппарат, изображенный на фиг.8 и фиг.9, по отношению к диапазонам давления на входе и давления на выходе.
На фиг.11 схематично изображен гидравлический аппарат согласно восьмому предпочтительному варианту осуществления предлагаемого изобретения, при этом на виде сбоку в разрезе показан также аксиальный гидравлический насос.
На фиг.12 схематично изображен гидравлический аппарат согласно девятому предпочтительному варианту осуществления предлагаемого изобретения.
Описание наилучших вариантов осуществления предлагаемого изобретения
На фиг.1, фиг.2 и фиг.3 схематично изображен автоматически регулирующийся гидравлический аппарат 30, предназначенный для извлечения энергии из движения волн / преобразования энергии волн, который содержит аксиальный гидравлический насос 31, имеющий корпус 32, образующий камеру 33. Упомянутый корпус 32 содержит боковую стенку 34, имеющую верхний конец, закрытый верхней стенкой 35, и нижний конец, закрытый донной стенкой 36. Упомянутая донная стенка 36 выполнена с возможностью прикрепления к основанию 37.
Внутри камеры 33 установлен поршень 38, который обеспечивает разделение камеры 33 на штоковый или рабочий отсек 39 и глухой отсек 40 и который выполнен с возможностью скользящего возвратно-поступательного перемещения внутри камеры 33. Между поршнем 38 и боковой стенкой 34 с целью недопущения протекания текучей среды за поршень 38 и перетекания ее между рабочим отсеком 39 и глухим отсеком 40 предусмотрено поршневое уплотнение (на прилагаемых чертежах не показано). В идеальном случае благодаря идеальному уплотнению между движущимся поршнем 38 и боковой стенкой 34 насоса 31 рабочий отсек 39 и глухой отсек 40 камеры 33 внутри насоса 31 не сообщаются. По мере износа уплотнения допускается некоторое перетекание текучей среды между двумя отсеками камеры 33.
К поршню 38 прикреплен механический демпфер 41 на стороне рабочего отсека 39, так что упомянутый механический демпфер 41 расположен со стороны рабочего отсека 39 камеры 33. Кроме того, к поршню 38 прикреплен механический демпфер 42 на стороне глухого отсека 39, так что упомянутый механический демпфер 42 расположен со стороны глухого отсека 39 камеры 33.
От поршня 38 с прохождением сквозь отверстие в верхней стенке 35 корпуса 32 простирается поршневой шток 43, установленный с возможностью возвратно-поступательного движения поршня 38 относительно корпуса 32. С целью недопущения протекания текучей среды из камеры 33 через упомянутое отверстие предусмотрено штоковое уплотнение (на прилагаемых чертежах не показано)..
С верхним концом поршневого штока 43 соединен плавучий активирующий элемент 44 с помощью фала 45.
Кроме того, гидравлический аппарат 30 содержит гидравлическую цепь 46 глухого отсека, которая включает глухой отсек 40 камеры 33 и гидравлический аккумулятор 47 на стороне глухого отсека камеры. Упомянутая гидравлическая цепь 46 глухого отсека камеры закрыта, так что текучая среда может обмениваться только между глухим отсеком 40 камеры 33 и гидравлическим аккумулятором 47 на стороне глухого отсека камеры. Упомянутый гидравлический аккумулятор 47 на стороне глухого отсека камеры соединен с глухим отсеком 40 камеры 33 посредством гибкого шланга 48, так что для текучей среды обеспечена возможность протекания между гидравлическим аккумулятором 47 на стороне глухого отсека камеры и глухим отсеком 40 камеры 33. Сопротивление гидравлического аккумулятора 47 на стороне глухого отсека является минимальным всегда, за исключением скрытой зоны, которая преодолевается путем блокирования каналов насоса с помощью поршневого стопорного кольца.
Обычно текучая среда в гидравлической цепи 46 глухого отсека камеры содержит смесь жидкости и газа. Гидравлический аккумулятор служит просто в качестве резервуара и в идеальном случае не оказывает демпфирующего эффекта.
Возможно такое решение, при котором текучая среда в гидравлической цепи 46 глухого отсека обладает низкой вязкостью. Как и в случае многих поршневых гидравлических аккумуляторов, глухой отсек может быть заполнен газом, например, азотом с целью снижения гидродинамических потерь по сравнению с жидкостью. Еще одно преимущество такого решения в том, что оно экономично и требует гидравлических аккумуляторов меньших размеров.
Возможно такое решение, при котором текучая среда в гидравлической цепи 46 глухого отсека обладает высокой смазывающей способностью. При высокой смазывающей способности текучей среды обеспечивается продление срока службы поршневого уплотнения. Кроме того, такая текучая среда может использоваться для смазки штокового уплотнения через капилляр (на прилагаемых чертежах не показан). Смазывающая жидкость требуется в относительно малом объеме, поэтому связанные с ней дополнительные расходы перекрываются экономией на обслуживании и сокращении простоев.
Кроме того, гидравлический аппарат 30 содержит также выпускной обратный клапан 49, соединенный с рабочим отсеком 39 камеры 33 через посредство гибкого шланга 50, так что для текучей среды обеспечивается возможность протекания от камеры 33 и через упомянутый выпускной обратный клапан 49 в направлении, обозначенном стрелкой «А». В параллель с выпускным обратным клапаном 49 и гибким шлангом 50 соединен впускной обратный клапан 51, так что для текучей среды обеспечивается возможность протекания через упомянутый впускной обратный клапан 51 и в камеру 33 в направлении, обозначенном стрелкой «В».
Параллельно с выпускным обратным клапаном 49 соединен гидравлический аккумулятор 52 на стороне выхода. Параллельно с впускным обратным клапаном 51 соединен гидравлический аккумулятор 53 на стороне входа.
Согласно варианту осуществления предлагаемого изобретения, схематично проиллюстрированному на фиг.1, часть гидравлического аппарата 30 находится вне берега, в толще воды 54 в открытом море или океане, имеющем водную поверхность 55 и средний уровень 56. Гидравлический насос 31 прикреплен к основанию 37, которое установлено на морском дне 57 под толщей воды 54. Упомянутый гидравлический насос 31 прикреплен к основанию 37 с возможностью вращения относительно этого основания 37. В сопрягающем гидравлическом узле 58, который тоже находится вне берега, расположены обратные клапаны 49 и 51, а также гидравлические аккумуляторы 47, 52 и 53. Выход высокого давления гидравлического сопрягающего узла 58 с помощью трубопровода высокого давления сообщен со входом высокого давления береговой установки 59, а вход низкого давления гидравлического сопрягающего узла 58 с помощью трубопровода низкого давления сообщен с выходом низкого давления упомянутой береговой установки.
Плавучий активирующий элемент 44 находится в толще воды 54, так что благодаря волновому движению толщи воды и своей положительной плавучести плавучий активирующий элемент 44 следует за движением возмущенной воды, так что на плавучий активирующий элемент 44 действует направленная кверху выталкивающая сила, и от него, в свою очередь, сила действует на фал 45, который, в свою очередь, воздействует на находящийся в камере 33 поршень 38, стремясь вытянуть его кверху, по направлению к верхней стенке 35 корпуса 32 насоса. Когда поршень 38 перемещается кверху, текучая среда в рабочем отсеке 39 камеры 33 через гибкий шланг 50 и выпускной обратный клапан 49 выталкивается из камеры 33 в направлении, обозначенном буквой «А» (см. фиг.3).
Некоторая часть энергии текучей среды, перекачиваемой через выпускной обратный клапан 49, хранится в гидравлическом аккумуляторе 52 на стороне выхода, который работает на сглаживание потока текучей среды через секцию высокого давления гидравлической цепи с обратной связью, частью которой являются выпускной обратный клапан 49 и гидравлический аккумулятор 52 на стороне выхода. Текучая среда протекает по остальной части гидравлической цепи, а затем через отдельную ветвь этой гидравлической цепи возвращается в насос 31 по направлению, обозначенному буквой «В» (см. фиг.3).
Когда поршень 38 внутри камеры 33 перемещается кверху, текучая среда в гидравлической цепи 46 на стороне закрытого глухого отсека через гибкий шланг 48 протекает из гидравлического аккумулятора 47 на стороне глухого отсека камеры в глухой отсек 40 камеры 33. Текучая среда в гидравлической цепи 46 обладает высокой смазывающей способностью и низкой вязкостью.
Механический демпфер 41 на стороне рабочего отсека камеры оказывает на перемещение поршня 38 демпфирующее действие при приближении последнего к верхней стенке 35 корпуса 32 насоса, благодаря чему предотвращается повреждение поршня 38 и корпуса 32 насоса при движении поршня 38 кверху. В частности, благодаря наличию механического демпфера 41 при движении поршня 38 кверху уменьшается ударная нагрузка на насос 31 и фал 45.
При прохождении над гидравлическим аппаратом 30 волны плавучий активирующий элемент 44 под действием веса поршня 38 опускается вниз, и текучая среда побуждается в замкнутой гидравлической цепи к течению и возвращается в рабочий отсек 39 камеры 33, проходя через впускной обратный клапан 51 и гибкий шланг 50 в направлении, обозначенном буквой «В». Некоторая часть энергии возвращающейся текучей среды хранится в гидравлическом аккумуляторе 53, который работает на сглаживание потока текучей среды через секцию низкого давления гидравлической цепи с обратной связью.
Когда поршень 38 внутри камеры 33 перемещается книзу, обладающая высокой смазывающей способностью и низкой текучестью текучая среда в глухом отсеке 40 камеры 33 протекает от камеры 33 обратно в гидравлический аккумулятор 47 на стороне глухого отсека камеры через гибкий шланг 48. В идеальном случае гидравлический аккумулятор 47 на стороне глухого отсека камеры не оказывает какого-либо гидравлического демпфирования, а работает просто как резервуар.
Механический демпфер 42 на стороне глухого отсека камеры оказывает на перемещение поршня 38 демпфирующее действие при приближении последнего к донной стенке 36 корпуса 32 насоса, благодаря чему предотвращается повреждение поршня 38 и корпуса 32 насоса при движении поршня 38 книзу. В частности, благодаря наличию механического демпфера 42 при движении поршня 38 книзу уменьшается ударная нагрузка на насос 31 и фал 45.
Цикл повторяется всякий раз, когда над гидравлическим аппаратом 30 проходит гребень волны и впадина волны.
Как можно видеть на фиг.2, предлагаемый гидравлический аппарат 30 может содержать набор упорядоченных в матрицу насосов 31 и плавучих активирующих элементов 44, сообщенных с сопрягающим гидравлическим узлом 58.
На фиг.4 схематично изображен гидравлический аппарат 60 для извлечения энергии из движения волн / преобразования энергии волн, сходный с гидравлическим аппаратом 30. Поэтому сходные элементы гидравлических аппаратов 60 и 30 имеют одинаковые ссылочные обозначения.
От гидравлического аппарата 30 гидравлический аппарат 60 отличается тем, что гидравлический аппарат 60 дополнительно содержит гидравлический аккумулятор 61 на стороне рабочего отсека, соединенный в параллель с рабочим отсеком 39 камеры 33 с помощью гибкого шланга 50, так что для текучей среды обеспечена возможность протекания между камерой 33 и гидравлическим аккумулятором 61 на стороне рабочего отсека камеры.
Кроме того, гидравлический аппарат 60 содержит сопрягающий гидравлический узел 62, включающий гидравлический аккумулятор 47 на стороне глухого отсека камеры, выпускной обратный клапан 49, впускной обратный клапан 51, гидравлический аккумулятор 52 на стороне выхода, гидравлический аккумулятор 53 на стороне входа и гидравлический аккумулятор 61 на стороне рабочего отсека камеры.
Упомянутый сопрягающий гидравлический узел 62 содержит выпускное отверстие 63 и впускное отверстие 64.
Работа гидравлического аппарата 60 по существу идентична работе гидравлического аппарата 30, за исключением того, что гидравлический аккумулятор 61 обеспечивает для поршня 38 гидравлическое демпфирование во время перемещения поршня 38 кверху, благодаря чему обеспечивается демпфирование в дополнение к демпфирующему эффекту механического демпфера 41 на стороне рабочего отсека камеры.
Упомянутый сопрягающий гидравлический узел 62 находится вне берега вместе с насосом 31 и плавучим активирующим элементом 44 гидравлического аппарата 60.
На фиг.5 схематично изображен гидравлический аппарат 70 для извлечения энергии из движения волн / преобразования энергии волн, содержащий аксиальный гидравлический насос 71, имеющий корпус 72, образующий камеру 73. Упомянутый корпус 72 имеет боковую стенку 74, у которой есть верхний конец, завершающийся верхней стенкой 75. Верхний участок 76 боковой стенки 74 по толщине превышает нижний участок 77 боковой стенки 74, так что верхний участок 78 камеры 73 оказывается более узким, чем нижний участок 79 камеры 73. Упомянутый верхний участок 76 боковой стенки 74 содержит верхний порт 80 и нижний порт 81.
Камера 73 вмещает поршень 82, который обеспечивает разделение камеры 73 на рабочий отсек 83 и глухой отсек 84 и выполнен с возможностью скользящего перемещения в обоих направлениях внутри камеры 73 вдоль нее. Поршень 82 имеет верхний участок 85 и более широкий нижний участок 86. В отличие от нижнего участка 86 поршня 82 верхний участок 85 поршня 82 достаточно узок для того, чтобы вмещаться верхним участком 78 камеры 73, как это можно видеть на фиг.5. По верхней периферии верхнего участка 85 поршня 82 проходит углубленный край 87. Упомянутый углубленный край 87 содержит вертикальную поверхность 88 и идущую под откос вниз поверхность 89. Углубленный край 87 служит для недопущения полного перекрытия верхнего порта 80 поршнем 82.
Между поршнем 82 и боковой стенкой 74 предусмотрено уплотнение 90, не допускающее попадания текучей среды за поршень 82 и между рабочим отсеком 83 и глухим отсеком 84.
От поршня 82 простирается поршневой шток 91, который проходит через отверстие в верхней стенке 75 корпуса 72 насоса, так что для упомянутого поршневого штока 91 обеспечена возможность перемещения в обоих направлениях вместе с поршнем 82 относительно корпуса 72. Предусмотрено также уплотнение 92, предназначенное для недопущения утечки текучей среды из камеры 73 через отверстие в верхней стенке 75.
Гидравлический аккумулятор 93 на стороне рабочего отсека камеры соединен с верхним портом 80 посредством гибкого шланга 94, так^что для „ текучей среды обеспечена возможность протекания в том и другом направлении между рабочим отсеком 83 камеры 73 и гидравлическим аккумулятором 93 на стороне рабочего отсека камеры.
С нижним портом 81 соединен гибкий шланг 95. Для находящейся под высоким давлением текучей среды обеспечены условия для вытеснения из камеры 73 через нижний порт 81 и гибкий шланг 95 в направлении, обозначенном стрелкой «А» (см. фиг.5), а для находящейся под высоким давлением текучей среды обеспечены условия для поступления в камеру 73 через нижний порт 81 и гибкий шланг 95 в направлении, обозначенном стрелкой «В» (см. фиг.5).
На фиг.6 схематично изображен автоматически регулирующийся гидравлический аппарат 100, предназначенный для извлечения энергии из движения волн / преобразования энергии волн, содержащий гидравлическую нагрузку, включающую тангенциальную турбину 101. Упомянутая гидравлическая нагрузка может включать также электрический генератор (на чертеже не показан), приводимый во вращение с помощью упомянутой тангенциальной турбины 101.
Кроме того, в составе гидравлического аппарата 100 присутствует гидравлический аппарат 60, который содержит гидравлический насос 31. Работа этого гидравлического насоса 31 заключается в перекачивании текучей среды через гидравлический аппарат 100 с целью приведения в движение тангенциальной турбины 101.
В состав гидравлического аппарата 100 входит также гидравлическое управляющее устройство 102, выполненное с возможностью управления текучей средой, перекачиваемой насосом 31 через гидравлический аппарат 100. В частности, упомянутое гидравлическое управляющее устройство 102 управляет давлением и расходом текучей среды и в секции высокого давления, и в секции низкого давления гидравлического аппарата 100.
Гидравлическое управляющее устройство 102 имеет впускное отверстие 103, которое сообщено с выпускным отверстием 63 сопрягающего гидравлического узла 62 через посредство трубопровода высокого давления 104. Гидравлическое управляющее устройство 102 имеет выпускное отверстие 105, которое сообщено с впускным отверстием 106 тангенциальной турбины 101 через посредство трубопровода высокого давления 107. Выпускное отверстие 108 тангенциальной турбины 101 соединено с впускным отверстием 109 гидравлического управляющего устройства 102 через посредство трубопровода низкого давления 110. Выпускное отверстие 111 гидравлического управляющего устройства 102 соединено с впускным отверстием 64 сопрягающего гидравлического узла 62 через посредство трубопровода низкого давления 112.
С помощью автоматически регулирующегося гидравлического аппарата, такого как гидравлический аппарат 100, схематично изображенный на фиг.6, может быть осуществлена полностью замкнутая система автоматического управления насосом. Управляющий алгоритм, реализованный для управления работой как береговой системы управления, так и находящихся в море устройства 31 для извлечения энергии волн и сопрягающего гидравлического узла 62, с входными сигналами силы и смещения насоса, может управлять входным и выходным давлениями насоса для максимизации выходной мощности (смещение), а также уменьшать ударные воздействия при перемещении поршня насоса вверх и вниз. Этот алгоритм обеспечивает как повышение выходной мощности установки, так и снижение износа и риска повреждения насоса 31. Этот подход обеспечивает также компенсацию приливных перемещений, при условии что ход насоса имеет длину, достаточную для перекрывания амплитуды прилива.
В качестве реакции на приливные вариации гидравлический аппарат 100 должен был бы сохранять постоянное местоположение по отношению к среднему уровню положения плавучего активирующего элемента в столбе воды. Это может быть достигнуто с помощью управления с обратной связью.
Управляющий алгоритм адаптирован к конкретному местоположению и содержит информацию о местном волновом режиме и амплитуде прилива и обеспечивает оптимальную работу преобразователя энергии волн в данном месте. Например, преобразователь энергии волн может быть развернут у берегов штата Западная Австралия, а также Европы и некоторых заморских территорий Франции. Все эти места могут иметь разные амплитуды прилива и разную статистику движения волн. При применении адаптированного к конкретному местоположению, разработанного по заказу управляющего алгоритма обеспечивается возможность развертывания в каждом месте одной и той же установки и находящегося в море оборудования оптимальным образом.
Кроме того, этот управляющий алгоритм обеспечивает возможность искусственного управления или псевдоуправления плавучестью плавучего активирующего элемента. Это может быть достигнуто путем управления давлением на входе насоса для синтетического понижения физической плавучести плавучего активирующего элемента 44. Благодаря этому решению обеспечивается преимущество, состоящее в том, что обеспечивается возможность работы (перемещение книзу) плавучего активирующего элемента 44 во время более мелкого волнения. Давление на выходе не меняет эффективную плавучесть плавучего активирующего элемента, но для обеспечения работы (перемещение кверху) может управляться сходным образом в некотором диапазоне условий волнения.
Кроме того, этот управляющий алгоритм обеспечивает введение в функцию переноса фала некоторую степень гидравлического «растяжения». Требуемые характеристики жесткости гидравлического аппарата 100 обычно не обеспечиваются одним только механическим растяжением фала, и для гидравлического «растяжения» с целью достижения требуемых характеристик могут быть использованы присутствующие в составе гидравлической цепи гидравлические аккумуляторы.
Гидравлический аппарат 100 может обеспечивать извлечение скрытой энергии. Для абсорбции некоторой части скрытой энергии во время скрытой фазы движения поршня и доставки этой энергии обратно в систему для последующей абсорбции рабочим агентом могут быть использованы гидравлические аккумуляторы гидравлического аппарата 100.
Каждый из вышеописанных признаков может быть придан гидравлическому аппарату 100 индивидуально или прогрессивно.
Кроме того, каждый из вышеописанных признаков может быть придан гидравлическому аппарату или системам за пределами гидравлического аппарата для извлечения энергии из движения волн. Например, они могут быть приданы гидравлическому аппарату или системам за его пределами, когда имеются:
1) различные силовые воздействия на гидравлический насос,
2) возможность повреждения по причине предельного движения гидравлического насоса, и
3) долговременный износ или утечка, которые должны быть компенсированы в системе.
На фиг.7 схематично изображен автоматически регулирующийся гидравлический аппарат 120, предназначенный для извлечения энергии из движения волн / преобразования энергии волн, содержащий аксиальный гидравлический насос 121, имеющий корпус 122, образующий камеру 123. Упомянутый корпус 122 содержит боковую стенку 124, имеющую верхний конец, закрытый верхней стенкой 125, и нижний конец, закрытый донной стенкой 126. Упомянутая донная стенка 126 выполнена с возможностью прикрепления к основанию (на чертеже не показано).
Внутри камеры 123 установлен поршень 127, который обеспечивает разделение камеры 123 на рабочий отсек 128 и глухой отсек 129 и выполнен с возможностью скользящего возвратно-поступательного перемещения внутри камеры 123. Между поршнем 127 и боковой стенкой 124 с целью недопущения протекания текучей среды за поршень 127 и перетекания ее между рабочим отсеком 128 и глухим отсеком 129 предусмотрено уплотнение (на чертеже не показано).
От поршня 127 простирается поршневой шток 130, который проходит сквозь отверстие в верхней стенке 125 корпуса 122, так что для упомянутого поршневого штока 130 обеспечена возможность перемещения в обоих направлениях вместе с поршнем 127 относительно корпуса 122. Предусмотрено также уплотнение (на чертеже не показано), предназначенное для недопущения утечки текучей среды из камеры 123 через упомянутое отверстие в верхней стенке.
Предусмотрен выпускной обратный клапан 131, соединенный с рабочим отсеком 128 камеры 123 с помощью быстрого разъединителя 132. Предусмотрен также впускной обратный клапан 133, соединенный параллельно с рабочим отсеком 128 с помощью быстрого разъединителя (разъема) 132. Упомянутый впускной обратный клапан 133 соединен параллельно также с глухим отсеком 129 камеры 123 с помощью быстрого разъединителя 134. Предусмотрен также клапан 135, представляющий собой клапан, срабатывающий в определенной последовательности, который соединен параллельно с упомянутыми выпускным обратным клапаном 131 и впускным обратным клапаном 133.
Предусмотрен гидравлический управляющий клапан 140, соединенный последовательно с гидравлическим аккумулятором 141 на стороне выхода. Упомянутый гидравлический управляющий клапан 140 соединен параллельно упомянутым выпускному обратному клапану 131 и клапану 135, срабатывающим в определенной последовательности.
Предусмотрен гидравлический управляющий клапан 142, соединенный последовательно с гидравлическим аккумулятором 143 на стороне входа. Упомянутый гидравлический управляющий клапан 142 соединен параллельно с упомянутым клапаном 135, срабатывающим в определенной последовательности.
Предусмотрен датчик давления 144, выполненный с возможностью считывания давления в секции высокого давления гидравлического аппарата 120, и расходомер 145, выполненный с возможностью измерения расхода текучей среды в этой секции гидравлического аппарата 120.
Предусмотрен пропорциональный дроссель 146, соединенный с упомянутым расходомером 145, и еще один датчик давления 147, выполненный с возможностью считывания давления текучей среды, выходящей из упомянутого пропорционального дросселя 146.
Текучая среда, выходящая из пропорционального дросселя 146, приводит в движение турбину 148, которая, в свою очередь, обеспечивает приведение в работу водяного насоса 149 для охладителя.
Находящаяся под низким давлением текучая среда, выходящая из турбины 148, приводит в работу водяной насос 150, с помощью которого осуществляется охлаждение текучей среды, возвращающейся к насосу 121, и проходит через обратный клапан 151, соединенный параллельно с клапаном 135, срабатывающим в определенной последовательности.
Клапаны 140 и 142, датчики давления 144 и 147, расходомер 145, пропорциональный дроссель 146 и клапан 135, срабатывающий в определенной последовательности, входят в состав управляющего устройства или системы управления, осуществляющей управление гидравлическим аппаратом 120.
Гидравлический аппарат 120 может расходовать энергию. То есть, он может осуществлять рассеяние избыточной энергии. Например, если турбина 148 приводит во вращение электрический генератор, подключенный к электрической сети, и в этой электрической сети произошел отказ, то гидравлический аппарат 120 может рассеивать энергию, а не использовать ее для приведения во вращение турбины 148. Энергия может рассеиваться при работе гидравлического аппарата 120, чтобы поддерживать более низкие значения давления в камере 123 насоса, или путем использования толщи воды, в которой пребывает насос 31, в качестве поглотителя тепла и нагревания этой воды. Клапан 135, срабатывающий в определенной последовательности, может быть задействован в режиме шунтирования турбины 148.
Работа гидравлического аппарата 30, 60, 70, 100, 120 в режиме с обратной связью обеспечивает возможность использования многих инноваций, описываемых здесь.
Важно то, что работа гидравлического аппарата в режиме с обратной связью позволяет использовать во многих разных местах по всему миру универсальные или стандартизированные наборы оборудования и настраивать реакцию каждого гидравлического аппарата либо активно в режиме реального времени, либо с предварительной установкой, так чтобы была обеспечена адаптация к различным условиям движения волн, к приливным вариациям и, в самом общем смысле, согласовывать широкий диапазон прогнозируемых рабочих сценариев, имеющих место в разных местах.
Выгода от возможности использовать универсальную или стандартизированную систему или набор насосов, плавучих активирующих элементов, фалов и гидравлического оборудования состоит в том, что изготовление такого оборудования может быть оптимизировано, и можно достичь больших объемов производства и снизить затраты. Каждый набор оборудования, будучи развернутым на месте, может быть оптимизирован с помощью управляющих алгоритмов, которые работают в автоматически регулирующейся гидравлической системе. Каждое место может иметь привязанный к нему алгоритм, управляющий движением гидравлической текучей среды в качестве реакции на волновую и приливную динамику этого места с оптимизацией выхода энергии и минимизацией износа или риска повреждения работающего в воде оборудования.
На фиг.8 схематично изображен автоматически регулирующийся гидравлический аппарат 160, предназначенный для извлечения энергии из движения волн / преобразования энергии волн, содержащий аксиальный гидравлический насос 161, имеющий корпус 162, образующий камеру 163. Упомянутый корпус 162 содержит боковую стенку 164, имеющую верхний конец, закрытый верхней стенкой 165, и нижний конец, закрытый донной стенкой 166. Упомянутая донная стенка 166 выполнена с возможностью прикрепления к основанию (на чертеже не показано), которое покоится на дне массива воды, в котором находится упомянутый насос 161, или прикреплено к этому дну.
Внутри камеры 163 установлен поршень 167, который обеспечивает разделение камеры 163 на рабочий отсек 168 и глухой отсек 169 и выполнен с возможностью скользящего возвратно-поступательного перемещения внутри камеры 163. Между поршнем 167 и боковой стенкой 164 с целью недопущения протекания текучей среды за поршень 167 и перетекания ее между рабочим отсеком 168 и глухим отсеком 169 предусмотрено уплотнение (на чертеже не показано).
От поршня 167 простирается поршневой шток 170, который проходит сквозь отверстие в верхней стенке 165 корпуса 162, так что для упомянутого поршневого штока 170 обеспечена возможность перемещения в обоих направлениях вместе с поршнем 167 относительно корпуса 162. Предусмотрено также уплотнение (на чертеже не показано), предназначенное для недопущения утечки текучей среды из камеры 163 через упомянутое отверстие в верхней стенке.
В составе насоса 161 предусмотрен также выпускной обратный клапан 171, соединенный с глухим отсеком 169 насоса 161. Упомянутый выпускной обратный клапан 171 выполнен с возможностью недопущения протекания текучей среды обратно к насосу 161.
Предусмотрен также плавучий активирующий элемент (на чертеже не показан), соединенный с верхним концом поршня 170 посредством фала.
Настроечный гидравлический аккумулятор 172 на стороне рабочего отсека камеры соединен с рабочим отсеком 168 насоса 161 через посредство гибкого шланга 173. Упомянутый гидравлический аккумулятор 172 соединен с гидравлическим аккумулятором 174 на стороне выхода через посредство выпускного обратного клапана 175, выполненного с возможностью недопущения протекания через него текучей среды обратно к насосу 161. Предусмотрен управляемый выпускной клапан 176, через посредство которого обеспечено соединение гидравлического аккумулятора 174 на стороне выхода с теплообменником 177. Упомянутый теплообменник 177 соединен с промежуточным гидравлическим аккумулятором 178 через посредство обратного клапана 179, выполненного с возможностью недопущения протекания через него текучей среды обратно к теплообменнику 177. Предусмотрен также управляемый впускной клапан 180, соединенный с впускным обратным клапаном 181, который соединен с рабочим отсеком 168 насоса 161 и выполнен с возможностью недопущения протекания текучей среды через него и прочь от насоса 161. Предусмотрен гидравлический аккумулятор 182 на стороне входа, который соединен с рабочим отсеком 168 насоса 161 через посредство упомянутого впускного обратного клапана 181. Предусмотрены турбина 183 и обратный клапан 184, которые соединены в параллель с управляемым выпускным клапаном 176, теплообменником 177, промежуточным гидравлическим аккумулятором 178, обратным клапаном 179 и управляемым впускным клапаном 180. Упомянутая турбина 183 выполнена с возможностью приведения в действие электрического генератора 185.
Предусмотрен клапан сброса давления 186, который соединен параллельно с управляемым выпускным клапаном 176, теплообменником 177, промежуточным гидравлическим аккумулятором 178 и обратным клапаном 179. Упомянутый клапан сброса давления 186 выполнен с возможностью предотвращения избыточного нагнетания давления в секции высокого давления гидравлической цепи гидравлического аппарата 160. Упомянутый клапан сброса давления 186 может быть управляемым клапаном.
Обратный клапан 171 соединен с дренажным гидравлическим аккумулятором 187 на стороне глухого отсека через посредство гибкого шланга 188, а также соединен с дозаправочным электрическим насосом 189. Предусмотрен обратный клапан 190, который соединяет упомянутый дозаправочный электрический насос 189 параллельно с обратным клапаном 181 и гидравлическим аккумулятором 182. Предусмотрен обратный клапан 190, который выполнен с возможностью предотвращения протекания текучей среды через него к дозаправочному электрическому насосу 189.
Дозаправочный электрический насос 189 выполнен с возможностью перекачивания гидравлической текучей среды, которая накапливается в глухой стороне гидравлической цепи, которая включает гидравлический аккумулятор 187, обратно в рабочую сторону гидравлической цепи, которая соединена с выходом дозаправочного электрического насоса 189.
Как можно видеть на фиг.9, электрический генератор 185 обеспечивает электрической энергией зарядное устройство 191, которое соединено с внешним зарядным батарейным модулем 192. С помощью упомянутого зарядного устройства 191 и/или внешнего зарядного батарейного модуля 192 осуществляется зарядка батареи 193 и батареи 194. Электрический насос 189 снабжается электрической энергией от батареи 194. Система управления / управляющее устройство 195 снабжается электрической энергией от батареи 193.
Предусмотрена совокупность чувствительных элементов 196, соединенных с одним или большим количеством входов упомянутого управляющего устройства 195. В состав упомянутой совокупности чувствительных элементов 196 могут входить чувствительные элементы различных типов, включая чувствительные элементы давления, температуры и расхода гидравлической текучей среды в гидравлическом аппарате 160.
Выпускной клапан 176, впускной клапан 180 и дозаправочный электрический насос 189 соединены с выходами управляющего устройства 195, так что для управляющего устройства 195 обеспечена возможность управлять работой выпускного клапана 176, впускного клапана 180 и насоса 189. Управляющее устройство 195 выполнено с возможностью управления работой выпускного клапана 176, впускного клапана 180 и насоса 189 в качестве реакции на выходной сигнал (выходные сигналы) чувствительного»: элемента (чувствительных элементов) 196. Иначе говоря, управляющее устройство 195 выполнено с возможностью управления работой выпускного клапана 176, впускного клапана 180 и насоса 189 в ответ на предоставляемые чувствительными элементами 196 значения давления, температуры и расхода текучей среды.
Клапан сброса давления 186 может быть также соединен с выходом управляющего устройства 195 таким образом, что клапан сброса давления 186 также попадает под управление от управляющего устройства 195.
Управляющее устройство 195 может быть выполнено с возможностью управления работой выпускного клапана 176, впускного клапана 180, насоса 189 и/или клапана сброса давления 186 таким образом, что для гидравлического аппарата 160 обеспечивается возможность извлечения, преобразования или передачи оптимального или близкого к оптимальному количества энергии движения волн в толще воды, в которой пребывает гидравлический аппарат 160.
Варьирование впускного и выпускного давлений в гидравлической цепи позволяет обеспечить некоторую степень контроля над ходом поршня. Диапазоны пределов среднего хода поршня / диапазона перемещения поршня гидравлического аппарата, такого как гидравлический аппарат 160, по отношению к / в зависимости от средних управляющих давлений (Hsig=0,45 м, Tsig=3 с) / различных разностей между впускным и выпускным давлениями для периода постоянных условий движения волн - см. диаграммы на фиг.10. Как можно видеть на фиг.10, при уменьшения максимальной разности между впускным и выпускным давлениями увеличивается минимальное значение диапазона перемещения поршня. Подобные диаграммы могут быть получены также для других типов условий движения волн.
Замысел гидравлической системы / гидравлического аппарата 160 состоит в том, что это - автоматически регулирующаяся гидравлическая система / гидравлический аппарат 160, который способен поддерживатьдавления на входе и выходе насоса. При работе насоса в гидравлической цепи возникают давление и расход текучей среды. Управление давлением гидравлической цепи осуществляется двумя управляющими клапанами 176 и 180, один из которых (а именно, выпускной клапан 176) управляет давлением на выходе насоса 161, а другой (а именно, впускной клапан 180) управляет давлением на входе насоса 161. Оба клапана, выпускной клапан 176 и впускной клапан 180, являются двумя главными «рычагами» в гидравлической системе / гидравлическом аппарате 160. Управление обоими управляющими клапанами 176 и 180 осуществляется дистанционно с целью варьирования давления для различных режимов волн. В рассматриваемой конструкции тангенциальная турбина заменена на два управляющих клапана и теплообменник 177, используемый в качестве средства для рассеяния энергии, генерируемой насосом 161. На стороне глухого отсека 169 не происходит переноса текучей среды. При расширении камеры насоса создается частичное разрежение. В случае наличия внутренней утечки текучей среды через поршневые уплотнения текучая среда отводится через дренажное отверстие, и с помощью обратного клапана 171 обеспечивается недопущение возвращения текучей среды обратно в насос 161 при движении поршня 167 и поршневого штока 178 в сторону расширения.
Настроечный / штоковый гидравлический аккумулятор 172 на стороне рабочего отсека играет ключевую роль в оптимизации гидравлической системы / гидравлического аппарата 160. Путем регулирования газовой загрузки и объема гидравлического аккумулятора 172 обеспечивается возможность управления потоком мощности и динамикой потока мощности. Кроме того, характерной чертой этой автоматически регулируемой гидравлической системы / гидравлического аппарата 160 является то, что динамические эффекты, подобные гидравлическому удару, то есть, эффекты переноса момента могут быть смягчены путем продуманного регулирования настроечного гидравлического аккумулятора 172 на стороне рабочего отсека, а также гидравлического аккумулятора 174 на стороне выхода и гидравлического аккумулятора 182 на стороне входа. Причиной эффектов переноса момента может быть отскок одного или большего количества обратных клапанов.
Клапан сброса давления 186 выполнен с возможностью предотвращения избыточного нагнетания давления в гидравлическую систему / гидравлический аккумулятор 160. Замысел гидравлической системы / гидравлического аппарата 160 состоит также в том, что он содержит штоковые гидравлические аккумуляторы 172, 174, 178 и 182 на стороне рабочего отсека 168 насоса 161 с целью обеспечения возможности хранения гидравлической энергии и управления вариациями давления. Дренажный гидравлический аккумулятор 187 на стороне глухого отсека выполнен с возможностью хранения гидравлической текучей среды, появляющейся в результате внутренних утечек на уровне насоса или системы, пока она не будет снова нагнетена в главную (то есть, на стороне рабочего отсека) гидравлическую цепь гидравлического аппарата 160. С помощью обратных клапанов 171, 175, 179, 181 и 184 обеспечивается правильность направления (направлений) протекания гидравлической текучей среды через гидравлическую цепь. Кроме того, расположение настроечного гидравлического аккумулятора непосредственно перед обратным клапаном 175 со стороны выхода насоса имеет целью настройку гидравлической системы / гидравлического аппарата 160 и оптимизацию производимой мощности.
Поток текучей среды через гидравлический аппарат 160 можно варьировать между «мягким» режимом и «жестким» режимом. В «мягком» режиме, который соответствует самой низкой нагрузке на насос 161, клапан сброса давления 186 полностью открыт, так что через клапан 186 перекачивается существенная часть текучей среды. В «жестком» режиме, который соответствует самой высокой нагрузке на насос 161, клапан сброса давления 186 и впускной клапан 180 полностью закрыты, а выпускной клапан 176 полностью.
С помощью малого насоса, работающего от батареи (то есть, дозаправочного электрического насоса 189) осуществляется возвращение текучей среды, потерянной из-за внутренней утечки в насосе на стороне рабочего отсека 168 насоса 161, в глухой отсек 169 насоса 161.
Как можно видеть на фиг.9, все приборы / чувствительные элементы 196, клапаны 176 и 180 и возвратный / дозаправочный электрический насос 189 сопряжены с установленной на месте системой управления / управляющим устройством 195. Гидравлическая система / гидравлический аппарат 160 содержит две батареи 193 и 194. От главной батареи (то есть, батареи 193) снабжается электрической энергией приборное оборудование / система управления, в том числе приборы / чувствительные элементы 196, клапаны 176 и 180 и система управления / управляющее устройство 195. От вспомогательной батареи 194 снабжается электрической энергией дозаправочный электрический насос 189 и вспомогательное оборудование.
На фиг.11 схематично изображен автоматически регулирующийся гидравлический аппарат 200, предназначенный для извлечения энергии из движения волн / преобразования энергии волн, содержащий аксиальный гидравлический насос 201, имеющий корпус 202, образующий камеру 203. Упомянутый корпус 202 содержит боковую стенку 204, имеющую верхний конец, закрытый верхней стенкой 205, и нижний конец, закрытый донной стенкой 206. Упомянутая донная стенка 206 выполнена с возможностью прикрепления к основанию (на чертеже не показано), которое покоится на дне массива воды, в котором находится упомянутый насос 201, или прикреплено к этому дну.
Внутри камеры 203 установлен поршень 207, который обеспечивает разделение камеры 203 на рабочий отсек 208 и глухой отсек 209 и выполнен с возможностью скользящего возвратно-поступательного перемещения внутри камеры 203. Между поршнем 207 и боковой стенкой 204 с целью недопущения протекания текучей среды за поршень 207 и перетекания ее между рабочим отсеком 208 и глухим отсеком 209 предусмотрено уплотнение (на чертеже не показано).
От поршня 207 простирается поршневой шток 210, который проходит сквозь отверстие в верхней стенке 205 корпуса 202, так что для упомянутого поршневого штока 210 обеспечена возможность перемещения в обоих направлениях вместе с поршнем 207 относительно корпуса 202. Предусмотрено также уплотнение (на чертеже не показано), предназначенное для недопущения утечки текучей среды из камеры 203 через упомянутое отверстие в верхней стенке.
В составе насоса 201 предусмотрен также выпускной обратный клапан 211, соединенный с глухим отсеком 209 насоса 201.
Предусмотрен также плавучий активирующий элемент (на чертеже не показан), соединенный с верхним концом поршня 210 посредством фала.
Предусмотрен настроечный / штоковый гидравлический аккумулятор 212 на стороне рабочего отсека, который соединен с рабочим отсеком 208 насоса 201 через посредство гибкого шланга 213. Упомянутый гидравлический аккумулятор 212 соединен с гидравлическим аккумулятором 214 на стороне выхода через посредство обратного клапана 215. Предусмотрен управляемый выпускной клапан 216, через посредство которого осуществлено соединение упомянутого гидравлического аккумулятора 214 на стороне выхода с турбиной или тангенциальной турбиной 217, так что для гидравлической текучей среды, вытекающей из клапана 216, обеспечивается возможность вращения упомянутой турбины или тангенциальной турбины 217. Упомянутая турбина или тангенциальная турбина 217 может быть соединена с электрическим генератором (на чертеже не показан), так что при вращении турбины или тангенциальной турбины 217 обеспечивается приведение во вращение упомянутого электрического генератора, который генерирует электрическую энергию. Выход или выпускное отверстие турбины или тангенциальной турбины 217 сообщено с емкостью или резервуаром 217', так что находящаяся под низким давлением гидравлическая текучая среда, выходящая из турбины или тангенциальной турбины 217, течет в упомянутый резервуар 217', как показано на чертеже стрелками 218. Резервуар 217' соединен с рабочим отсеком 208 насоса 201 через посредство насоса 219, управляемого впускного клапана 220, обратного клапана 221 и гибкого шланга 213. Упомянутый насос 219 выполнен с возможностью перекачки текучей среды к насосу 201. Предусмотрен промежуточный гидравлический аккумулятор 222, который соединен с рабочим отсеком 208 насоса 201 параллельно с насосом 219 и впускным клапаном 220. Предусмотрен гидравлический аккумулятор 223 на стороне входа, который соединен с рабочим отсеком 208 насоса 201 в параллель с обратным клапаном 221. Предусмотрены клапан сброса давления 224 и клапан сброса давления 225, которые подсоединены между стороной высокого давления гидравлической цепи, которая соединена с рабочим отсеком 208 насоса 201, и стороной низкого давления этой гидравлической цепи. Клапан сброса давления 224 и/или клапан сброса давления 225 могут быть управляемыми.
Упомянутый обратный клапан 211 соединен с дренажным гидравлическим аккумулятором 226 на стороне глухого отсека камеры через посредство гибкого шланга 227, а также соединен с дозаправочным электрическим насосом 228. Предусмотрен обратный клапан 229, который соединяет упомянутый дозаправочный электрический насос 228 с резервуаром 217. Дозаправочный электрический насос 228 выполнен с возможностью перекачивания гидравлической текучей среды, которая накапливается в гидравлической цепи на стороне глухого отсека, которая включает гидравлический аккумулятор обратно в резервуар 217', который находится в гидравлической цепи на стороне рабочего отсека, которая соединена с выходом насоса 228.
Все компоненты гидравлического аппарата 200, которые на чертеже расположены слева от линий разрыва 230, находятся в море в толще воды, а все компоненты гидравлического аппарата 200, которые на чертеже расположены справа от линий разрыва 230, находятся на берегу.
В составе гидравлического аппарата 200 имеются также не показанные на чертеже средства для снабжения энергией различных его компонентов. Например, если турбина или тангенциальная турбина приводит во вращение электрический генератор, то этот генератор может питать электрической энергией зарядное устройство. С помощью этого зарядного устройства, работающего совместно с модулем зарядки батарей, может осуществляться зарядка одной или большего количества батарей гидравлического аппарата 200, от которых электрической энергией снабжаются компоненты гидравлического аппарата 200.
Предусмотрена воздушная / газовая линия 231, посредством которой осуществлено соединение каждого из гидравлических аккумуляторов 212, 214, 222, 223 и 226 с одним или большим количеством базирующихся на берегу источников зарядки воздухом / газом (на чертеже не показаны).
Как и гидравлический аппарат 160, гидравлический аппарат 200 тоже может содержать систему управления / управляющее устройство (на чертеже не показано). Питание упомянутого управляющего устройства электрической энергией может осуществляться от батарей гидравлического аппарата 200.
Предусмотрена совокупность чувствительных элементов (на чертеже не показана), соединенных с одним или большим количеством входов упомянутого управляющего устройства гидравлического аппарата 200. В состав упомянутой совокупности чувствительных элементов могут входить чувствительные элементы различных типов, включая чувствительные элементы давления, температуры и расхода гидравлической текучей среды в гидравлическом аппарате 200.
Под управлением упомянутого управляющего устройства могут находиться выпускной клапан 216, впускной клапан 220, дозаправочный насос 228, клапан сброса давления 224 и/или клапан сброса давления 225. Это управляющее устройство может управлять работой выпускного клапана 216, впускного клапана 220, дозаправочного насоса 228, клапана сброса давления 224 и/или клапана сброса давления 225 в качестве реакции на выходной сигнал (выходные сигналы) чувствительного элемента (чувствительных элементов), который соединен (которые соединены) с выходом (выходами) управляющего устройства. Иначе говоря, управляющее устройство может управлять работой выпускного клапана 216, впускного клапана 220, дозаправочного насоса 228, клапана сброса давления 224 и/или клапана сброса давления 225 в качестве реакции на поставляемые различными чувствительными элементами значения давления, температуры и расхода текучей среды.
Управляющее устройство может управлять работой выпускного клапана 216, впускного клапана 220, дозаправочного насоса 228, клапана сброса давления 224 и/или клапана сброса давления 225 таким образом, чтобы извлечение энергии из волнового движения в толще воды, в которой находится гидравлический аппарат 200, ее преобразование или передача осуществлялись гидравлическим аппаратом 200 оптимальным или близким к оптимальному образом.
Предусмотрено наличие одной линии - гибкого шланга или трубопровода к рабочему отсеку 208 насосной камеры 203, и к этой линии подсоединен настроечный гидравлический аккумулятор 212 на стороне рабочего отсека. Дренажный гидравлический аккумулятор 226 на стороне глухого отсека камеры и дозаправочный электрический насос 228, которые находятся на берегу, переносят текучую среду, которая утекает из глухого отсека 209 насоса 201 во впускную линию главной гидравлической цепи, которая соединена со стороной рабочего отсека насоса 201. Посредством клапана сброса давления 224 осуществлено соединение выпускной и впускной линий главной гидравлической цепи на морском конце контура вблизи насоса 201. Клапан сброса давления 224 обеспечивает аварийное отключение системы при нагнетании избыточного давления в главную гидравлическую цепь. Клапан сброса давления 225, который может присутствовать, а может и не присутствовать, и который, если он присутствует, находится на берегу, обеспечивает резерв в случае отказа находящегося в море клапана сброса давления 224.
Поток, т.е. струя гидравлической текучей среды приводит во вращение турбину 217, и отработанная / находящаяся под низким давлением текучая среда на выходе из турбины 217 возвращается в резервуар (накопительную емкость) 217' для повторного нагнетания и возвращения к насосу 201. Линии 231, показанные на чертеже со стрелками на концах, идут на берег и являются опорными точками. Газовая нагрузка в упомянутых линиях 231 различных гидравлических аккумуляторов от берега может варьироваться в соответствии с управляющим алгоритмом.
Функция выпускного управляющего клапана 216 может быть осуществлена впускным или игольчатым клапаном (как он называется) для турбины / тангенциальной турбины 217, и в таком случае отпадает необходимость в отдельных компонентах выпускного клапана 216, так как он содержится в компоновке турбины / тангенциальной турбины 217.
Схематично проиллюстрированный на фиг.12 автоматически регулирующийся гидравлический аппарат 250, предназначенный для извлечения энергии из движения волн / преобразования энергии волн, подобен гидравлическому аппарату 200, но в отличие от последнего содержит матрицу из восьми гидравлических насосов / преобразователей энергии волн 201, при этом каждый из этих насосов 201 имеет настроечный гидравлический аккумулятор 212 на стороне рабочего отсека и обратные клапаны 215 и 221, соединенные с рабочим отсеком 208 насоса 201. Гидравлический аппарат 250 моделирует полномасштабную систему, содержащую совокупность блоков преобразователей энергии по технологии СЕТО™.
Каждый из упомянутых обратных клапанов 215 соединен с коллектором 251, а каждый из упомянутых обратных клапанов 221 соединен с коллектором 252. Упомянутый коллектор 251 соединен с гидравлическим аккумулятором на стороне выхода, а упомянутый коллектор 252 соединен с гидравлическим аккумулятором на стороне входа.
Глухой отсек каждого насоса 201 может быть соединен с одним или большим количеством дренажных гидравлических аккумуляторов 226 на стороне глухого отсека через посредство одного или большего количества гибких шлангов 227 и обратных клапанов 211, а также с дозаправочным электрическим насосом 228, который может быть соединен с резервуаром 217 гидравлического аппарата 250 через посредство обратного клапана 229.
Через посредство соответствующей зарядной воздушной / газовой линии 231, обозначенной звездочкой, осуществлено соединение каждого из гидравлических аккумуляторов 212, 214, 222, 223 и 226 гидравлического аппарата 250 с одним или большим количеством базирующихся на берегу источников зарядки воздухом / газом (на чертеже не показан).
При типичном расположении насосов 201 гидравлического аппарата 250 они упорядочены в матрицу, так что в погруженном состоянии находится не более трех рядов.
Насосы 201 могут как быть, так и не быть одинаковыми.
В типичной установке / гидравлическом аппарате того типа, который схематично проиллюстрирован на фиг.12, может содержаться восемь упорядоченных в матрицу насосов 201, соединенных в море вместе, при этом в море накапливается поток, поступающий на турбину / тангенциальную турбину 217, находящуюся на берегу. Находящийся на берегу внешний насос 219 выполнен с возможностью подачи потока обратно на насос для привода поршней находящихся в море насосов 201 вниз. На фиг.12 это схематично показано в качестве примера. В альтернативном варианте находящаяся под давлением гидравлическая текучая среда, поступающая на турбину / тангенциальную турбину 217, может быть использована для подачи потока обратно на насосы 201 для привода поршней насосов 201 вниз.
Рабочая энергетическая установка, на которой используются насосы / точечные преобразователи энергии волн, может быть построена из любого количества блоков, количество блоков определяется общей выходной мощностью, требуемой для этой энергетической установки. Под точечным преобразователем энергии волн понимается любой преобразователь энергии волн, который ведет себя как единый точечный поглотитель энергии.
Вышесказанное относится к различным системам для управления устройством для извлечения энергии волн и оптимизации его работы. Упомянутое устройство для извлечения энергии волн содержит преобразователь энергии волн с подъемом гидравлической мощности, такой как преобразователь энергии волн по технологии СЕТО™, представляющий собой частный случай преобразователя энергии волн. Такой преобразователь энергии волн работает в режиме с обратной связью, то есть, является автоматически регулирующимся. Контур этой обратной связи содержит линию выхода из устройства, находящуюся под более высоким давлением, и линию впуска текучей среды (возвратную линию), находящуюся под существенно более низким давлением. Текучая среда, циркулирующая в контуре обратной связи, имеет существенно водную основу. Посредством этой текучей среды осуществлен перенос энергии к берегу. Эта текучая среда переносит энергию за счет давления и потока. Кроме того, предусмотрено средство для отвода энергии от рабочей текучей среды на берегу с помощью гидромеханического устройства, такого как турбина или обменный двигатель давления.
Система может содержать элементы управления, которые находятся на берегу и/или в море. Упомянутые элементы управления могут содержать клапаны для регулирования давления и поток в выпускной линии и впускной линии на берегу. Кроме того, эти элементы управления могут содержать находящийся в море клапан сброса давления, расположенный между впускной и выпускной линиями. Эти элементы управления могут также содержать гидравлические аппараты, находящиеся в море. Кроме того, элементы управления могут также содержать гидравлические аппараты, находящиеся на берегу, один из которых соединен с выпускной линией, а другой соединен с впускной линией. Кроме того, элементы управления могут также содержать клапан сброса давления, расположенный на берегу между впускной и выпускной линиями.
В системе может использоваться управляющий алгоритм для управления элементами управления. Например, если элементы управления содержат гидравлические клапаны, и давление газа заряжает гидравлические аккумуляторы, то упомянутый управляющий алгоритм может быть использован для управления ими.
Упомянутый управляющий алгоритм может осуществлять одну или большее количество следующих функций или иметь одно или большее количество следующих свойств.
а. Настраивает механическую жесткость путем варьирования объема гидравлического аккумулятора (открытие/закрытие клапанов) преобразователя энергии волн по технологии СЕТО™ WEC (аббревиатура от wave energy converter - преобразователь энергии волн), в том числе между двумя крайними состояниями поршня: зажатым и свободным. Под крайним зажатым состоянием поршня здесь понимается такое положение, при котором поршень имеет минимальную возможность движения по причине того, что гидравлическая текучая среда ограничена в движении внутри гидравлической цепи до такой степени, которую позволяет настроечный гидравлический аккумулятор, а под крайним свободным состоянием поршня здесь понимается такое положение, при котором имеет место свободное протекание текучей среды между впускной и выпускной цепями, и поршень имеет возможность перемещаться под действием собственного веса и приложенной к нему внешней силы.
b. Настраивает эталонное положение поршня насоса при использовании технологии СЕТО™для аккомодации медленных вариаций глубины воды, которые имеют место при приливах и отливах.
c. Настраивает управляющие органы преобразователя энергии волн в режиме реального времени в соответствии с входными сигналами от находящегося поблизости аппарата для измерения волн. Такой аппарат выполнен с возможностью регистрации мгновенных значений высоты волны (Н), периода волны (Т), протяженности волны (θ) и других релевантных параметров, которыми определяется состояние моря, и которые могут предоставить для алгоритма эту информацию в режиме реального времени.
d. Настраивает установки в операции, описанной в пункте с) таким образом, что мощность Р имеет мгновенный максимум.
e. Настраивает установки в операции, описанной в пункте с) таким образом, что мощность Р имеет мгновенный минимум.
f. Настраивает установки в операции, описанной в пункте с) таким образом, что мощность Р превосходит некоторую минимальную величину Рmс вероятностью рm.
g. Применяет предварительно установленный шаблон F для ограничения значений параметров управляющих органов, что максимизирует общую мощность, обеспечиваемую преобразователем энергии волн в течение промежутка времени т.
h. Период τε варьирования упомянутого промежутка времени τ может составлять величину от секунд до минут и часов.
i. Каждый период τε связан с уникальным шаблоном Fε, который определяет стационарную рабочую точку и диапазон для управления, осуществляемого управляющим алгоритмом А.
j. Управляющий алгоритм А может содержать ряд шаблонов Fε, упоминаемых в пункте i), так что каждый шаблон воздействует таким образом, что в любой период от самого короткого до самого долгого обеспечивается оптимальный выход энергии Еmах. То есть, управляющий алгоритм А постоянно настроен на обеспечение максимальной общей энергии Еmах, где
k. Конкретный управляющий алгоритм А может также быть выведен из набора управляющих алгоритмов Аi, где набор Аi- содержит элементы, специфические для одного или большего количества из следующих условий:
a) конкретное географическое положение;
b) конкретная глубина воды и батиметрия;
c) конкретная характеристика волновой активности, например, энергичная, внебереговая, слабая, прибрежная или их комбинация;
d) конкретное время года, например, зима, лето;
e) конкретное исполнение преобразователя энергии волн;
f) конкретное физическое исполнение преобразователя энергии волн, в том числе механизм высвобождения энергии, как описано в совместно рассматриваемых патентных заявках компании СЕТО IP Pty Ltd;
g) конкретное физическое состояние преобразователя энергии волн, соответствующее возрасту, состоянию, рабочей биографии преобразователя энергии волн;
h) любые другие вариации в исполнении преобразователя энергии волн;
i) доминирующие состояния моря в течение года. Например, одно место около острова Гарден-Айленд у берегов Западной Австралии имеет от шести до восьми доминирующих состояний моря;
j) конкретные условия безопасности/аварийности.
Вышеприведенное описывает также систему, содержащую совокупность упорядоченных в матрицу преобразователей энергии волн, соединенных вместе параллельно с общим набором впускных и выпускных трубопроводов, образующих автоматически регулирующуюся систему с обратной связью, как описано выше.
В системе, содержащей совокупность упорядоченных в матрицу преобразователей энергии волн, оптимизация алгоритма А зависит от протяженности волн. Алгоритмы Аi- и шаблонов Fε принципиально отличаются от алгоритмов для случая единственного преобразователя энергии волн. Следует заметить, что в случае совокупности блоков разница в алгоритме по сравнению со случаем единственного блока доминирует в отношении гидравлического взаимодействия между блоками.
Описана также система согласно всем вышеупомянутым системам, в которой алгоритмы Аi- генерируются в соответствии с подходом оптимального фильтра.
Отклик единичного точечного поглотителя - преобразователя энергии волн, такого как единичный преобразователь энергии волн по технологии СЕТО™, может быть описан математически с помощью функции мощности Р(Н,Т,θ), которая указывает, что в принципе мгновенная мощность является функцией мгновенного значения высоты волны (Н), мгновенного значения периода волны (Т) и мгновенного значения угла протяженности волн. В реальном море возможно наличие множественных направлений волн, волн от ветра, подъемных волн, а также, возможно, других компонентов.
Функция Р представляет мгновенное значение мощности.
Генерирование функции отклика Р может быть достигнуто разными путями, а именно:
i) путем приведения в возбужденное состояние упомянутого единичного преобразователя энергии волн с помощью последовательности импульсов синусоидальных волновых воздействий с известными периодом Т и амплитудой Н и измерения получившегося в результате мгновенного значения мощности Р;
ii) путем моделирования входных сигналов для преобразователя энергии волн в конечной элементной модели и/или динамической модели, которая точно описывает выходной сигнал мощности как функцию этих переменных.
Вышеописанный процесс может быть описан с помощью трехмерной диаграммы, отражающей мгновенное значение мощности в зависимости от мгновенного значения периода волны и мгновенного значения высоты волны; эта диаграмма называется также «матрицей мощности». Эта матрица мощности описывает механический отклик системы, которая подвергается действию факторов морской среды и управляющих воздействий, которые могут быть приложены, как описано выше. Для гипотетического синусоидального волнового воздействия в результате интегрирования функции Р по времени т получается среднее значение энергии, доставляемой за время т для данного значения высоты волны и периода волны.
Высота волны и период реальных волн в водной среде имеют временные и пространственные стохастические (беспорядочные) вариации. Чтобы охарактеризовать эти вариации, а также корреляции между ними, используются функции временного и пространственного распределения. Получаемые в результате распределения и эмпирические модели, такие как спектр Пирсона-Московитца, дают спектральные распределения высоты волны в (высота волны)2 на частотном интервале в единицах измерения м2/Гц. Точность, с которой эти функции распределения могут описать и предсказать типичный волновой режим в данном месте и в данное время года, зависят от того, с насколько широким охватом может осуществляться в этом месте регистрация реальных или смоделированных данных. Чем более широк охват наблюдений или моделирования в этом месте, тем больше уровень статистической доверительности в прогнозирующей способности моделей, выводимых из этих данных.
Статистически предсказанная производительность в терминах выходной мощности преобразователя энергии волн в данном месте и в данное время года получается из свертки отклика машины (через матрицу мощности) и волновой модели, то есть, функции свертки. Общая предсказанная выходная энергия за время τ получается интегрированием функции свертки по времени.
Если функция свертки является робастной, то есть, если она может быть использована для предсказания выходных мощностей с высокой статистической достоверностью, затем эта функция может быть использована для оптимизации отклика преобразователя энергии волн (то есть, автоматически регулирующегося, имеющего контур обратной связи гидравлического аппарата, такого как гидравлический аппарат 160, 200, 250) путем применения его в качестве оптимального фильтра. В оптимальном фильтре используются знания о характеристиках системы, а также спектральных характеристиках возмущений, которые на него действуют, в данном случае волн, с целью максимизации выхода, в данном случае энергии, производимой преобразователем энергии волн.
Процесс осуществления оптимального фильтра ведет к управляющим алгоритмам Аi и связанные с ними управляющие уставки и диапазоны управления, указываемые функцией F, как описывалось выше. Методика оптимальных фильтров позволяет создать управляющий алгоритм, который меняет управляющие элементы преобразователя энергии волн (которые описывались выше), так что выходная энергия устройства на временном отрезке т максимизируется.
Методика генерирования оптимального фильтра и производных алгоритмов для единичного местоположения преобразователя энергии волн состоит в следующем.
i Определяют матрицу мощности Р для преобразователя энергии волн с помощью способа, в общих чертах описанного выше. Упомянутая матрица будет представлять собой функцию переменных состояния системы в зависимости от времени. К числу упомянутых переменных состояния относятся давление и потоки в выходном и возвратном контурах, и давления и объемы зарядки газа различных гидравлических аккумуляторах системы.
ii Определяют наиболее робастную спектральную модель для состояний моря, применимую к физическому местоположению преобразователя энергии волн. Используют способы, описанные выше. Весьма вероятно, что любое местоположение может быть описано с помощью фиксированного количества доминирующих состояний моря.
iii Производят свертку спектральной плотности состояний моря с помощью матрицы мощности. Следует иметь в виду, что могут быть естественные корреляции между переменными: высота волны и период волны. Получаемая в результате функция переноса относит производимую установкой мощность к переменной состояния преобразователя энергии волн, а также к параметрам океана. Эта функция может быть интегрирована по времени с целью получения оценочного среднего значения предсказанной выходной энергии преобразователя энергии волн на этом временном интервале. Это оценочное значение энергии является функцией переменных состояния преобразователя энергии волн, на котором работает управляющий алгоритм, а также определяется параметрами модели океана, используемой для предсказания спектра океанических возмущений.
iv Осуществляют мультипараметрическую оптимизацию функции энергии (переменных состояния) путем применения технологий векторного исчисления и находят локальные и глобальные экстремумы с помощью стандартных процедур, таких как метод Ньютона-Рафсона. Специалисты в области численного анализа и многомерной оптимизации знакомы с этими технологиями и с тем, при каких математических условиях они могут быть применены.
v Определяют рабочие точки и области стабильной работы в векторном пространстве упомянутой функции энергии Еmах. Этим обеспечивается генерирование эталонов F.
vi Применяют управляющую системную функции переноса к переменным состояния с целью генерирования управляющего алгоритма А.
vii Запускают модель упомянутого управляющего алгоритма с целью проверки точности и стабильности алгоритма А и задающего эталона F.
viii Повторяют стадии, начиная со стадии (ii), с разными состояниями моря с целью наполнения пространства требуемых управляющих алгоритмов Аi. Повторяют, начиная со стадии (i), если этот набор включает также вариации состояния машины.
Важной чертой процесса развития этого алгоритма и последующего его применения к преобразователю энергии волн является то, что он может быть сделан эвристическим, то есть, он обладает способностью к обучению в течение срока службы преобразователя энергии волн. Начальные модельные оценки статистики волн в данном месте могут быть относительно грубыми, и уровень достоверности их предсказаний может быть повышен с течением времени в процессе работы преобразователя энергии волн, и может быть построена более детальная картина волнового режима.
Упомянутое обучение обеспечивается благодаря передаче этой информации обратно в процесс генерирования алгоритма на стадии (ii). Подобным образом существует возможность для эвристического процесса в матрице мощности, в то время как информация о старении оборудования собирается в течение срока службы и передается обратно в процесс генерирования алгоритма на стадии (i). В обоих случаях эвристическая разработка приводит к более полному набору алгоритмов Аi и шаблонов F с целью оптимизации выходной энергии при любых условиях, встречающихся на протяжении срока службы преобразователя энергии волн.
Вышеприведенные рассуждения и методология применимы равным образом к «волновой ферме» или матрице из множественных преобразователей энергии волн. Единственное отличие состоит в том, что в этом случае появляется больше переменных состояния, подлежащих регулированию, потому что установка оказывается более сложной, а также:
a) будет угловая зависимость, которая в матрице, мощности называется протяженность,
b) будет эффект взаимодействия между отдельными преобразователями энергии волн в упомянутой матрице, и
c) распределение углов прибытия для состояний моря сейчас должно будет быть включено в моделирование волн.
В отношении организации полезно обсуждение. Для оптимизации системы:
1) сначала определяют матрицу мощности;
2) затем, используя упомянутую матрицу мощности и модель волн, разрабатывают и оптимизируют системную функцию переноса;
3) затем, используя робастную спектральную модель для физического местоположения, оптимизируют функцию переноса для конкретного места. Именно здесь вступают в игру управляющие алгоритмы.
Этот процесс описывается следующей формулой:
Волны, которые приводят в действие насос гидравлического аппарата, представляют собой нерегулярный входной обусловливающий фактор, что значит, что насос гидравлического аппарата приводится в действие нерегулярным образом. Поэтому для обеспечения максимизации выходной мощности гидравлический аппарат нуждается в управлении. Для управления гидравлическим аппаратом используется оптимальный фильтр. Параметры гидравлической системы / гидравлического аппарата задаются в соответствии с «рецептом», предоставляемым упомянутым оптимальным фильтром. Этот оптимальный фильтр обычно будет другим или измененным в соответствии с местоположением гидравлического аппарата или в зависимости от времени года, например, летом один, зимой другой. Этот оптимальный фильтр может быть получен при испытании гидравлической системы / гидравлического аппарата с использованием разных параметров и/или с использованием моделей. Управление гидравлическим аппаратом в соответствии с оптимальным фильтром обеспечивает возможность максимизации энергии как площади под кривой мощности гидравлического аппарата.
Специалистам должно быть понятно, что без превышения объема предлагаемого изобретения и без отклонения от его духа возможна реализация вариаций и модификаций предлагаемого изобретения, как оно описано в настоящем описании. Считается, что упомянутые вариации и модификации, как это очевидно для специалистов, попадают в объем предлагаемого изобретения, как оно описано в настоящем описании, в его широком понимании.
Во всем тексте описания и формулы изобретения глагол «содержать» во всех его формах («содержит», «содержащий» и т.д.) должен пониматься так, что некая часть или группа частей включены в некое целое, что не исключает включения в это же целое другой части или группы частей, если только контекст не требует иного понимания.
Во всем тексте описания и формулы изобретения выражение «по существу» или «приблизительно» не. должны пониматься как ограничивающие величину в указанном диапазоне, если только контекст не требует иного понимания.
Должно быть понятно также, что если здесь делается ссылка на публикацию из предшествующего уровня техники, то эта ссылка не является признанием того, что эта публикация составляет часть общедоступного знания в этой отрасли для Австралии или любой другой страны.
Реферат
Изобретение относится к гидравлическому аппарату для извлечения энергии из движения волн. Автоматически регулирующийся гидравлический аппарат 200 для преобразования энергии волн содержит насос 201, предназначенный для перекачивания через гидравлический аппарат 200 текучей среды. Насос 201 имеет корпус 202, образующий камеру 203, и поршень 207, обеспечивающий разделение камеры 203 на рабочий отсек 208 и глухой отсек 209. Предусмотрен активирующий элемент, который соединен с поршнем 207. Впускное отверстие сообщено с рабочим отсеком 208 камеры 203 с обеспечением возможности протекания текучей среды от впускного отверстия в рабочий отсек 208 камеры 203. Выпускное отверстие сообщено с рабочим отсеком 208 камеры 203 с обеспечением возможности протекания текучей среды от рабочего отсека 208 камеры 203 к выпускному отверстию. Предусмотрено гидравлическое управляющее устройство, выполненное с возможностью управления насосом 201 путем управления давлением текучей среды у впускного отверстия и выпускного отверстия с обеспечением оптимизации выходной мощности насоса 201 как отклика на приливные вариации и/или состояние моря. Управление давлением текучей среды у впускного отверстия и выпускного отверстия осуществляется в соответствии с управляющим алгоритмом. Изобретение направлено на достижение больших объемов производства при более низких затратах. 2 н. и 19 з.п. ф-лы, 12 ил.
Формула
(i) определение матрицы мощности,
(ii) определение наиболее робастной спектральной модели для состояний моря, относящихся к физическому местоположению аппарата,
(iii) свертывание спектральной плотности состояния моря с упомянутой матрицей мощности для получения результирующей функции переноса,
(iv) осуществление мультипараметрической оптимизации функции мощности, полученной интегрированием упомянутой функции переноса по времени,
(v) определение рабочих точек и областей стабильной работы в векторном пространстве упомянутой функции мощности с целью генерирования эталонов,
(vi) применение управляющей системной функции переноса к переменным состояния аппарата с целью генерирования управляющего алгоритма,
(vii) запуск модели упомянутого управляющего алгоритма с целью проверки точности и стабильности алгоритма и задающего эталона и
(viii) при необходимости - повторение стадий (i) и (ii) с разными состояниями моря с целью наполнения пространства требуемых управляющих алгоритмов.
(i) определение матрицы мощности,
(ii) разработка и оптимизация управляющей системной функции переноса с использованием упомянутой матрицы мощности и волновой модели и
(iii) оптимизация упомянутой функции переноса для конкретного физического места с использованием робастной физической спектральной модели для этого физического места.
(i) определение матрицы мощности,
(ii) определение наиболее робастной спектральной модели для состояний моря, относящихся к физическому местоположению аппарата,
(iii) свертывание спектральной плотности состояния моря с упомянутой матрицей мощности для получения результирующей функции переноса,
(iv) осуществление мультипараметрической оптимизации функции мощности, полученной интегрированием упомянутой функции переноса по времени,
(v) определение рабочих точек и областей стабильной работы в векторном пространстве упомянутой функции мощности с целью генерирования эталонов,
(vi) применение управляющей системной функции переноса к переменным состояния аппарата с целью генерирования управляющего алгоритма,
(vii) запуск модели упомянутого управляющего алгоритма с целью проверки точности и стабильности алгоритма и задающего эталона и
(viii) повторение стадий (i) и (ii) с разными состояниями моря при необходимости наполнения пространства требуемых управляющих алгоритмов.
(i) определение матрицы мощности,
(ii) разработка и оптимизация управляющей системной функции переноса с использованием упомянутой матрицы мощности и волновой модели и
(iii) оптимизация упомянутой функции переноса для конкретного физического места с использованием робастной физической спектральной модели для этого физического места.
Комментарии