Устройство для генерации электроэнергии из энергии текучей среды - RU181009U1
Код документа: RU181009U1
Чертежи



Описание
Полезная модель относится к устройствам для преобразования кинетической энергии потока текучей среды в электроэнергию.
Известно изобретение «Система для преобразования энергии водяных волн в электроэнергию и механизм для изменения колебательного вращения на однонаправленное вращение (варианты)» (Автор Драгич Миле (RS), патент RU 2500917, публикация патента: 10.12.2013). Изобретение относится к использованию энергии волн и ее преобразованию в электрическую энергию. Это изобретение решает проблему преобразования периодического, переменного и прямолинейного движения входного вала, приводимого в движение воспринимающим элементом (плавучестью), в одностороннее вращение выходного вала для достижения более высокой степени использования энергии волн. Однако, к.п.д. преобразования энергии волны в электроэнергию невысок, так как отсутствует механизм оптимизации отбора максимальной мощности в каждый текущий момент времени.
Известна также полезная модель «Устройство для использования энергии морских волн». (Патент на полезную модель №: 69168, дата публикации декабрь 10, 2007). Устройство относится к гидроэнергетике, а именно к преобразованию энергии движения волн, возникающих на поверхности океанов, морей и крупных водоемов в электрическую энергию. Воспринимающие энергию элементы (плавучести) расположены в ажурных направляющих шахтах и передают эту энергию на исполнительные механизмы с помощью вертикальных штоков, закрепленных на плавучих средствах. К штокам дополнительно прикрепляют ферромагнитные стержни с возможностью возвратно-поступательного перемещения вместе со штоками. Стержни размещают в соленоидах. При движении ферромагнитных штоков в соленоидах генерируется ток. Однако в этом устройстве также отсутствует механизм оптимального (максимального) отбора мощности.
В качестве прототипа выбран «Способ использования энергии морских волн и устройство для его осуществления» (патент РФ 2221933, публикация патента: 20.01.2004).
В этом изобретении в качестве воспринимающих элементов энергии волн используют плавучести, а для передачи этой энергии на электрогенератор применяют трансмиссию, включающую зубчато-реечную передачу, валы, шестерни и редуктор. Зубчатые рейки вводятся в зацепление с храповыми шестернями при движении вверх и выводятся из зацепления при движении плавучести вниз. Таким образом, при движении плавучести вверх вращение через шестерни передается на маховик и, затем, через редуктор, на главный вал и жестко соединенный с ним вал генератора. При этом маховик вращается в одну сторону. Аналогичным образом с главным валом могут быть соединены дополнительные плавучести, которые передают на него энергию от других волн.
Однако, мгновенная мощность, отбираемая от энергии волн, как и у всех аналогов, зависит, в том числе, от нагружающего (тормозного) момента генератора, который пропорционален его току и, через трансмиссию передается на плавучесть в виде силы сопротивления (тормозной силы) «Fc», направленной против движения волны. Механизма оптимального регулирования тормозного момента в прототипе нет, а, значит, нет возможности оптимизировать отбор энергии от волны. То есть, в прототипе, как и в указанных аналогах, нет возможности максимального отбора мощности в текущий момет времени, а, следовательно, отбора максимпльной энергии волны за период.
Целью предлагаемой полезной модели является отбор максимальной мощности в каждый момент времени при изменяющейся скорости потока волны в зоне нахождения плавучести, а, следовательно, отбирание максимальной энергии волны за период.
Эта цель достигается тем, что в устройство для генерации электроэнергии из энергии текучей среды, содержащее плавучесть, неподвижную штангу, зубчато-реечную передачу, связанную трансмиссией с генератором, дополнительно включены датчики скорости потока жидкости, датчик относительной скорости потока жидкости, датчик положения плавучести, а также логическое устройство, блок переключения, сравнивающее и усилительное устройство, регулятор тока генератора и контроллер нагрузки, при этом на вертикальной неподвижной штанге укреплены неподвижная часть датчика положения и датчики скорости потока жидкости, а на плавучести установлены подвижная часть датчика положения и датчик относительной скорости потока жидкости, причем подвижная и неподвижная части датчика положения и датчик относительной скорости потока жидкости, укрепленный на плавучести, электрически соединены с логическим устройством, а датчики скорости потока жидкости на неподвижной штанге через блок переключения также соединены с логическим устройством, которое, в свою очередь, соединено с регулятором тока и с входами сравнивающего и усилительного устройства, при этом блок переключения соединен также с входами сравнивающего и усилительного устройства, выход которого соединен с входом регулятора тока, который электрически соединен с генератором и контроллером нагрузки, электрически связанным с электросетью, аккумулятором и конденсатором.
Сущность полезной модели поясняется чертежами.
На фиг. 1 приведено семейство кривых зависимости силы сопротивления «Fc» воспринимающего элемента (плавучести) или пропорциональной ей тока генератора «I» от скорости плавучести «V» при различных скоростях потока «Vп»;
на фиг. 2 изображены кривые зависимости мощности «Р», а также силы сопротивления потоку плавучести «Fc» от скорости плавучести «V»;
на фиг. 3 представлена схема устройства предлагаемой полезной модели;
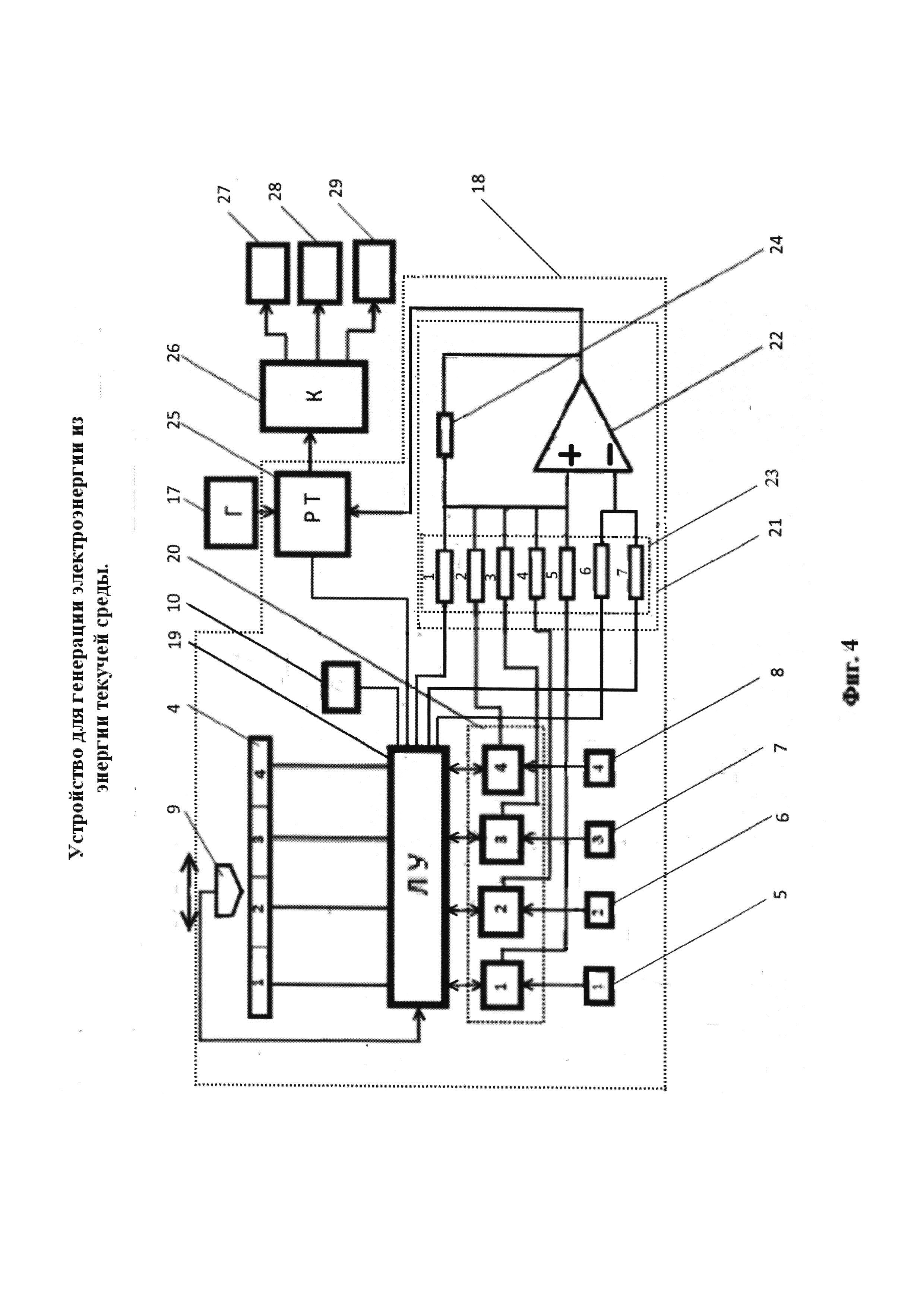
на фиг. 4 представлена схема системы управления устройством.
В общем виде, сила сопротивления плавучести вертикальному движению волны «Fc» определяется током генератора и пропорциональна этому току. Зависимость силы сопротивления «Fc» (тормозной силы) плавучести жидкостному потоку от скорости плавучести «V» при постоянной скорости жидкостного потока «Vп» носит характер близкий к степенной функции. На фиг. 1 показаны кривые зависимости силы сопротивления «Fc» (или пропорциональной ей тока генератора «I») воспринимающего элемента (плавучести) от скорости плавучести «V» при различных скоростях потока «Vп». Каждая из четырех кривых (1, 2, 3, 4) характеризует эту зависимость для четырех различных скоростей потока «Vп». Эта зависимость с некоторой степенью точности аппроксимируется квадратичной функцией:

где Fc - сила сопротивления плавучести жидкостному потоку волны;
V - скорость плавучести;
Vo - скорость потока жидкости относительно плавучести (относительная скорость потока);
Vп - скорость потока жидкости;
k - коэффициент.
В случае отсутствия тока генератора, а, значит, отсутствия тормозной силы «Fc» (Fc=0) плавучести, последняя, (пренебрегая ее инерционностью), движется со скоростью потока «Vп». При максимальной тормозной силе «Fc» имеем нулевую скорость движения плавучести «V». Вектор силы торможения и вектор скорости потока направлены в противоположные стороны, при этом во втором и первом квадранте график соответствует движению волны в одну из сторон, а в четвертом и третьем квадранте - в противоположную сторону. Мгновенная мощность, отбираемая у волны при торможении плавучести:

Зависимость мощности «Р» от скорости плавучести «V» выражается кубическим трехчленом. Кривая зависимости мощности «Р», а также зависимость силы сопротивления потоку плавучести «Fc» от скорости плавучести «V» показаны на фиг. 2. Для определения экстремумов этой функции (мощности«Р») находится производная этой функции и приравнивается нулю. Максимум этой функции, т.е. максимум мощности, отбираемой от потока, получим при скорости плавучести равной одной трети от скорости потока Vn (V=1/3 Vп) При этом сила сопротивления плавучести Fc=4/9 Fmax.
Описание полезной модели в статике.
Нейтральная или положительная плавучесть 1 расположена на неподвижной (например, закрепленной на дне) вертикальной штанге 2 и имеет возможность свободно по ней передвигаться. На штанге 2 с помощью жестко присоединенной к ней рамы 3 укреплены неподвижная часть датчика положения 4, состоящая, в свою очередь, из четырех зон (1, 2, 3, 4). Середина неподвижной части датчика положения 4 располагается на уровне поверхности воды при отсутствии волн. На этой же раме 3 жестко укреплены четыре датчика скорости потока жидкости 5, 6, 7 и 8. На плавучести 1 жестко укреплена подвижная часть датчика положения 9, контактирующая с одной из зон (1, 2, 3, 4) неподвижной части датчика положения 4. На плавучести 1 жестко укреплены также датчик относительной скорости потока жидкости 10 и стойка 11, в которой расположен вал 12 зубчатой шестерни 13. Зубчатая шестерня 13 находится в зацеплении с зубчатой рейкой 14. жестко укрепленной на неподвижной вертикальной штанге 2. Также зубчатая шестерня 13 через трансмиссию 15 соединена с валом 16 генератора 17.
Система регулирования 18 тока генератора 17 включает в себя логическое устройства 19, блок переключения 20, все датчики скорости и положения 5, 6, 7, 8, 10, 4 и 9, а также сравнивающее и усилительное устройство 21, состоящее, например, из операционного усилителя 22, блока входных сопротивлений 23, состоящего из семи входных сопротивлений (1, 2, 3, 4, 5, 6 и 7) и сопротивления обратной связи 24. Регулятор тока 25, все датчики скорости потока 5, 6, 7, 8 и 10, а также подвижная часть 9 и все четыре зоны (1, 2, 3, 4) неподвижной части 4 датчика положения электрически связаны с логическим устройством 19. Входные сопротивления (1, 6 и 7) блока входных сопротивлений 23 напрямую, а входные сопротивления (2, 3, 4, 5) через блок переключения 20 электрически связаны с логическим устройством 19. Регулятор тока 25 электрически связан также с генератором 17 и выходом сравнивающего и усилительного устройства 21, а также с контроллером нагрузки 26. Контроллер нагрузки 26 электрически соединен с аккумулятором 27, конденсатором 28 и электросетью 29.
Устройство работает следующим образом.
Плавучесть 1 под действием силы от жидкостного вертикального потока волны перемещается вертикально, приводя при этом во вращение шестерню 13 и, через трансмиссию 15, вал генератора 16. Логическое устройство 19 запитывает разными напряжениями зоны (1, 2, 3, 4) неподвижной части датчика положения 4 и получает сигнал с подвижной части датчика положения 9, которая контактирует с той зоной (1, 2, 3 или 4) неподвижной части датчика положения 4, в которой находится плавучесть 1 в текущий момент времени. Каждый из датчиков скорости потока жидкости 5, 6, 7, 8 укреплен на раме 3 штанги 2, соответственно, в одной из зон (1, 2, 3 или 4) неподвижной части датчика положения 4. Так, например, датчик скорости 5 находится в первой зоне неподвижной части датчика положения 4, датчик 6 - во второй зоне, датчик 7 - в третьей зоне, датчик 8 - в четвертой зоне неподвижной части датчика положения 4. В зависимости от сигнала с подвижной части датчика положения 9 (т.е. от той зоны, где находится плавучесть в данный момент времени), логическое устройство 19 подключает при помощи реле (1, 2, 3 или 4) блока переключения 20, соответствующий этой зоне датчик скорости потока жидкости 5, 6, 7 или 8 к одному из входных сопротивлений (2, 3, 4 или 5) блока сопротивлений 23 операционного усилителя 22. Таким образом, в каждый текущий момент времени подключается тот датчик скорости потока, который расположен в зоне нахождения плавучести 1. Получая сигналы с датчика относительной скорости жидкости 10 и соответствующего датчика скорости потока жидкости (5, 6, 7 или 8) логическое устройство 19 вычисляет значение скорости V=Vп-Vo плавучести 1. Сигнал, пропорциональный скорости «V» плавучести 1, логическое устройство 19 подает на сопротивление (6), которое соединено с инверсным входом операционного усилителя 22. При этом для выполнения условия отбора максимальной мощности, скорость плавучести, как показано выше, должна быть равной 1/3 от скорости потока жидкости. Поэтому коэффициент усиления операционного усилителя 22 по входным сопротивлениям (2, 3,4, 5) в три раза меньше, чем по сопротивлению (6), а именно: R24/R2=R24/R3=R24/R4=R24/R5=3×R24/R6.
Когда величина скорости плавучести «V» будет равняться 1/3 от скорости потока «Vп» на выходе операционного усилителя 22 будет нуль. При этом, как это следует из формулы (2) и кривой отбираемой мощности «Р» на фиг. 2, происходит максимальный отбор мощности жидкостного потока. Когда величина скорости «V» плавучести 1 не равна 1/3 скорости потока «Vп» жидкости в зоне нахождения плавучести 1, на выходе операционного усилителя 22 появляется сигнал рассогласования. Этот сигнал подается на регулятор тока 25, который, отрабатывая его, изменяет ток генератора, а, значит, силу сопротивления «Fc» жидкостному потоку, что, в свою очередь, приводит к изменению скорости «V» плавучести 1.
Это происходит до тех пор, пока скорость плавучести 1 не станет равной 1/3 скорости потока «Vп» жидкости в зоне нахождения плавучести 1 и сигнал рассогласования на выходе операционного усилителя 22 снова не станет равным нулю. При этом, как было показано выше, происходит максимальный отбор мощности «Р».
Этот же результат (максимальный отбор мощности «Р») можно получить также при отработке системой регулирования 18 силы сопротивления «Fc» плавучести 1 равной 4/9 «Fc шах». Получая значение скорости потока «Vп» с датчика скорости потока жидкости 5,6, 7 или 8 в зоне нахождения плавучести в данный момент времени, логическое устройство, используя формулу (1), вычисляет значение силы сопротивления «Fc» плавучести 1, равную 4/9 «Fc» max, при которой мощность, отбираемая от волны будет максимальной (фиг. 2).
Максимальную силу сопротивления «Fc шах» имеем при нулевой скорости (V=0) плавучести 1 (Fc max=k Vп2).
Сигнал о величине тока генератора, а, значит, величине тормозного момента генератора 17, а, следовательно, силе сопротивления «Fc» плавучести 1 потоку жидкости, логическое устройство 19 получает из регулятора тока 25. Логическое устройство 19 подает на сопротивление (2) блока сопротивлений 23 сигнал пропорциональный силе сопротивления «Fc» плавучести 1, а на сопротивление (3) блока сопротивлений 23 с логического устройства 19 подается сигнал пропорциональный Fc=-4/9 Fc max. Все другие сигналы на сопротивления блока сопротивлений 23 отключаются логическим устройством 19.
Если действующая в данный момент времени сила сопротивления «Fc» плавучести 1 потоку жидкости не равна 4/9 Fc max, на выходе операционного усилителя 22 появляется сигнал рассогласования, который отрабатывается системой регулирования 18 до тех пор, пока действующая сила сопротивления «Fc» плавучести 1 потоку жидкости не сравняется с заданной силой сопротивления (Fc=4/9 Fшax) и сигнал на выходе операционного усилителя 22 не станет равным нулю. При этом, как указывалось выше, происходит максимальный отбор мощности от энергии волны.
В случае положительной плавучести 1 на нее действует сила от жидкостного потока и выталкивающая сила, равная весу воды, вытесняемой плавучестью.
В этом случае, при уравновешении сил, действующих на плавучесть, суммарная сила сопротивления плавучести «Fcc» равна сумме сил, а именно силе сопротивления жидкостному потоку и выталкивающей силе.

где Fсс - суммарная сила сопротивления плавучести;
Fc - сила сопротивления жидкостному потоку;
Fв - выталкивающая сила, равная весу воды, вытесняемой плавучестью.
Отбираемая мощность в случае положительной плавучести равна

В случае положительной плавучести 1 при ее движении постоянно меняются положение плавучести, выталкивающая сила, скорость плавучести и скорость потока жидкости. Учет всех этих параметров при выработке алгоритма регулирования скорости плавучести 1 или суммарной силы сопротивления «Fcc» (пропорциональной току генератора 17) для отбора максимальной мощности, аналитически представляет сложную задачу. В предлагаемом устройстве выработка этого алгоритма может быть реализована опытным путем по результатам периодически проводимого тестирования. С помощью логического устройства 19 тестирование происходит в каждой из зон (1, 2, 3, 4) следующим образом.
Все сигналы, идущие на входные сопротивления блока сопротивлений 23 отключаются.
При малой длине каждой из зон (1, 2, 3, 4) возможно принять допущение о постоянной скорости потока «Vп» в пределах каждой из этих зон.
Обозначим для зоны (1) эту скорость как «Vп1». При этом, в соответствии с формулой (1), в зоне (1) скорость плавучести VI=Vпl-Vol, где VI - скорость плавучести в зоне (1);
Vпl - скорость потока жидкости в зоне (1);
Vol - скорость потока жидкости относительно плавучести 1 в зоне (1).
Используя это соотношение, логическое устройство 19 вычисляет значения скорости потока относительно плавучести Vol =Vпl-VI для нескольких следующих тестовых скоростей плавучести 1: VI=4/5 Vnl, VI=3/5 Vnl, VI=2/5 Vnl, и VI=1/5 Vnl.
Например, для скорости плавучести 1 равной 4/5 Vnl, относительная скорость потока жидкости Vol=1/5 Vnl. После вычисления «Vol» для указанных тестовых значений скорости VI плавучести 1, логическое устройство 19 последовательно подает вычисленные значения относительной скорости «Vol» на сопротивление (2) блока входных сопротивлений 23, а сигнал с датчика относительной скорости потока жидкости 10 (сигнал обратной связи) подает на сопротивление (6) блока входных сопротивлений 23. Система регулирования 18 последовательно отработает заданную относительную скорость потока жидкости «Vol» для каждой из скоростей VI плавучести 1: VI=4/5 Vnl, VI=3/5 Vnl, VI=2/5 Vnl, и VI=1/5 Vnl. При этом логическое устройство 19, получая информацию о токе генератора с регулятора тока 25, запоминает значение силы сопротивления «Fc» (пропорциональное току генератора 17) плавучести 1 для каждой из указанных скоростей плавучести 1. Имея значения силы сопротивления «Fcc» плавучести 1 жидкостному потоку для тестовых скоростей «VI» плавучести 1, логическое устройство 19 производит вычисление мощности «Р» для каждой тестовой скорости плавучести VI по формуле (4), а затем выбирает и запоминает относительную скорость «Vol» плавучести 1, при которой значение мощности «Р» максимально в зоне (1). Таким же образом проводится тестирование для всех остальных зон (2, 3, 4). В итоге получаем для каждой зоны значение относительной скорости «Vol» плавучести 1, при которой происходит максимальный отбор мощности от энергии волны.
При работе предлагаемой полезной модели логическое устройство 19, используя результаты тестирования, подает сигнал относительной скорости «Vo» плавучести 1, соответствующий максимальной мощности «Р» в той зоне, в которой находится в данный текущий момент плавучесть 1, на сопротивление (2) блока сопротивлений 23. Сигнал с датчика относительной скорости 10 логическое устройство 19 подает на сопротивление (6) блока сопротивлений 23. При этом система регулирования 18 отрабатывает сигнал относительной скорости «Vo» при которой происходит максимальный отбор мощности в данной зоне.
Таким образом, в каждый момент времени происходит максимально возможный отбор мощности от энергии волны.
Предлагаемое устройство позволяет корректировать положение центра колебаний плавучести 1 и его установки в нужной зоне. Для этого логическое устройство 19 подает на входное сопротивление (1) блока сопротивлений 23 сигнал задающий положение плавучести 1 (например, положение в центральной зоне неподвижной части датчика положения 4), а с подвижной части датчика положения 9 через логическое устройство 19 подается сигнал обратной связи по положению на сопротивление (7) блока сопротивлений 23. При этом система регулирования 18 становится системой регулирования по положению с корректирующей обратной связью по скорости и включает в себя логическое устройство 19, неподвижную часть датчика положени 4, подвижную часть датчика положения 9, операционный усилитель 22 с блоком входных сопротивлений 23, регулятор тока 25, датчик относительной скорости потока жидкости 10 и датчики скорости потока жидкости 5, 6, 7, и 8.
Слабая обратная связь по положению может использоваться при тестировании, описанном выше.
В этом случае, при тестировании, с логического устройства 19 подаются на сопротивление (1) несколько различных сигналов, задающих различные положения плавучести 1 (соответствующие ее положению в статике при отсутствии волн). При каждом из этих сигналов, задающих положение плавучести 1, проводится тестирование, описанное выше. После этого логическое устройство 19 выбирает и запоминает то значение задающего положение сигнала, при котором интегральное значение отбираемой мощности за период колебания волны максимально. При работе предлагаемой полезной модели логическое устройство 19, используя результаты тестирования, подает это значение на сопротивления (1) блока сопротивления 23, на сопротивление (7) - сигнал обратной связи с подвижной части датчика положения 9, а также, как было описано выше, на сопротивление (2) то значение относительной скорости потока для каждой зоны, при которой происходит максимальный отбор энергии волны, а на сопротивление (6) - сигнал с датчика относительной скорости 10.
Таким образом, предлагаемая полезная модель позволяет производить максимальный отбор энергии волны как в случае нейтральной плавучести, так и в случае положительной плавучести.
Частным случаем применения предлагаемой полезной модели может быть устройства для генерации электроэнергии, использующей кинетическую энергию воды или ветра, где в качестве элемента, воспринимающего энергию текучей среды служат, соответственно, турбина или лопасти ветровика. При этом, кроме датчика скорости текучей среды (воды или ветра), используется датчик угловой скорости генератора, вал которого через трансмиссию жестко связан с валом турбины или ветровика.
Реферат
Полезная модель относится к устройствам для преобразования кинетической энергии потока текучей среды (волны) в электроэнергию. Технический результат заключается в повышении объема энергии, отбираемой у волны при ее генерации в электроэнергию. Устройство, кроме плавучести и соединенной с ней при помощи трансмиссии электрогенератора, содержит логическое устройство, сравнивающее и усилительное устройство, регулятор тока генератора, контроллер нагрузки, датчик положения плавучести, датчики скорости потока жидкости и датчик скорости потока жидкости относительно плавучести. Для получения указанного выше результата система регулирования устройства регулирует скорость плавучести или ток генератора, а, следовательно, силу сопротивления плавучести жидкостному потоку таким образом, чтобы отбираемая мощность в каждый момент времени была максимальна.Частным случаем применения предлагаемой полезной модели может быть устройства для генерации электроэнергии, использующей кинетическую энергию воды или ветра, где в качестве элемента, воспринимающего энергию текучей среды служат, соответственно, турбина или лопасти ветровика. При этом, кроме датчика скорости текучей среды (воды или ветра), используется датчик угловой скорости генератора, вал которого через трансмиссию жестко связан с валом турбины или ветровика.

Комментарии