Преобразователь энергии волн - RU2300663C1
Код документа: RU2300663C1
Чертежи

Описание
Изобретение относится к области возобновляющихся источников энергии, а именно волновой энергии, и преобразования его в другие виды, преимущественно в электрическую.
Известна "Волновая энергетическая установка" (Петряков Л.А. "Волновая энергетическая установка". Патент РФ №2227844 С2, 7 F03B 13/18, 13/22, и РФ 2004 г. №12 (III) стр.520), содержащая волноприемник, желоб, рабочий орган с лопастями, соединенный с генератором, где рабочий орган выполнен в виде трех рабочих колес с лопастями, способных подниматься над желобом. При этом волноприемник снабжен подводным желобом на опорах, выполненных в виде домкратов. С помощью домкратов плиты волнолома способны изменять глубину погружения. К недостаткам известной волновой энергетической установки можно отнести низкий КПД, связанный с тем, что она преобразует только кинетическую энергию волн, а также сложность конструкции установки.
Известен также преобразователь энергии ветра и волн (Алиев А.С., Алиева Б.З. "Преобразователь энергии ветра и волн". Патент РФ №2254494 от 10.09.2003 г., F03D 5/04), который может быть указан в качестве ближайшего аналога изобретения (прототипа).
Прототип содержит связанные с помощью рычагов вращающиеся платформы. На каждой платформе установлены лопасти (парус) и кинематически связанные преобразователь движения и узел изменения ориентации и фиксации положения лопасти. Последние установлены в центре преобразователя и взаимодействуют со всеми лопастями и флюгером, установленном также в центре преобразователя.
Платформы выполнены в виде герметичных камер обтекаемой формы, на которых установлены плоские лопасти и связанные с ними неподвижно звездочки, с возможностью свободного вращения вокруг вертикальных стоек. При этом звездочки через цепи и тросы кинематически связаны с соответствующими сегментными звездочками.
В качестве недостатка прототипа можно указать конструктивную сложность преобразователя, а также то, что преобразователь энергии не реагирует на угловые колебания герметичных камер на волнах по тангажу.
Техническая задача заключается в значительном повышении мощности и КПД преобразователя за счет одновременного использования энергии поступательного (кинетической энергии) и поперечного движения (потенциальной энергии) волн, а также энергию угловых колебаний (потенциальной энергии) герметичных камер на волнах.
Данная техническая задача решается путем создания принципиально новой конструкции преобразователя энергии волн, который содержит неподвижную стойку и раму, на которой установлены первый и второй валы. При этом на каждом валу установлены соответствующие шестерни, взаимодействующие с первым и вторым преобразователями движения и валом, подключенным через мультипликатор к электрогенератору. При этом каждый преобразователь движения сдержит первый и второй вертикальные штоки, установленные с возможностью продольных вертикальных колебаний. На верхних концах штоков установлены первые блоки, а на нижних - соответствующие первые и вторые поплавковые камеры. Кроме того, каждый преобразователь движения содержит рычаг, соединяющий первую и вторую поплавковые камеры друг с другом, жестко связанный с лопастью и третьей звездой, которая через первые и вторые тросы и цепи взаимодействует с первой и второй звездами, установленными на соответствующих обгонных муфтах. На первом валу преобразователя неподвижно установлен маховик.
Во втором варианте конструкции преобразователь энергии волн второй вал через вторую и третью пары конических шестерен взаимодействует с общим выходным (третьим) валом, к которому могут быть подключены параллельно идентичные преобразователи энергии волн в большом количестве. К выходному валу через мультипликатор подключается электрогенератор.
Кроме того, во втором варианте преобразователя энергии волн преобразователь движения содержит обгонную муфту группы III, ступица которой через первую коническую пару шестерен связана с третьей звездой, обойма - с рычагом, а вилка - с лопастью, взаимодействующей с первой пружиной. При этом третья звезда через третью цепь взаимодействует с первой, второй и четвертой звездами.
Так как на один общий выходной вал передается энергия большого количества параллельно работающих преобразователей энергии (фиг.4- фиг.7), это приводит к значительному повышению мощности преобразователя, а также к повышению синхронности вращения выходного вала.
Суммарная мощность на выходном вале преобразователя определяется мощностью отдельного узла преобразователя движения, а также их количеством, которое задается из экономической целесообразности. Однотипные узлы преобразователя при их серийном производстве позволят существенно снизить себестоимость и сократить сроки окупаемости преобразователя энергии волн в целом.
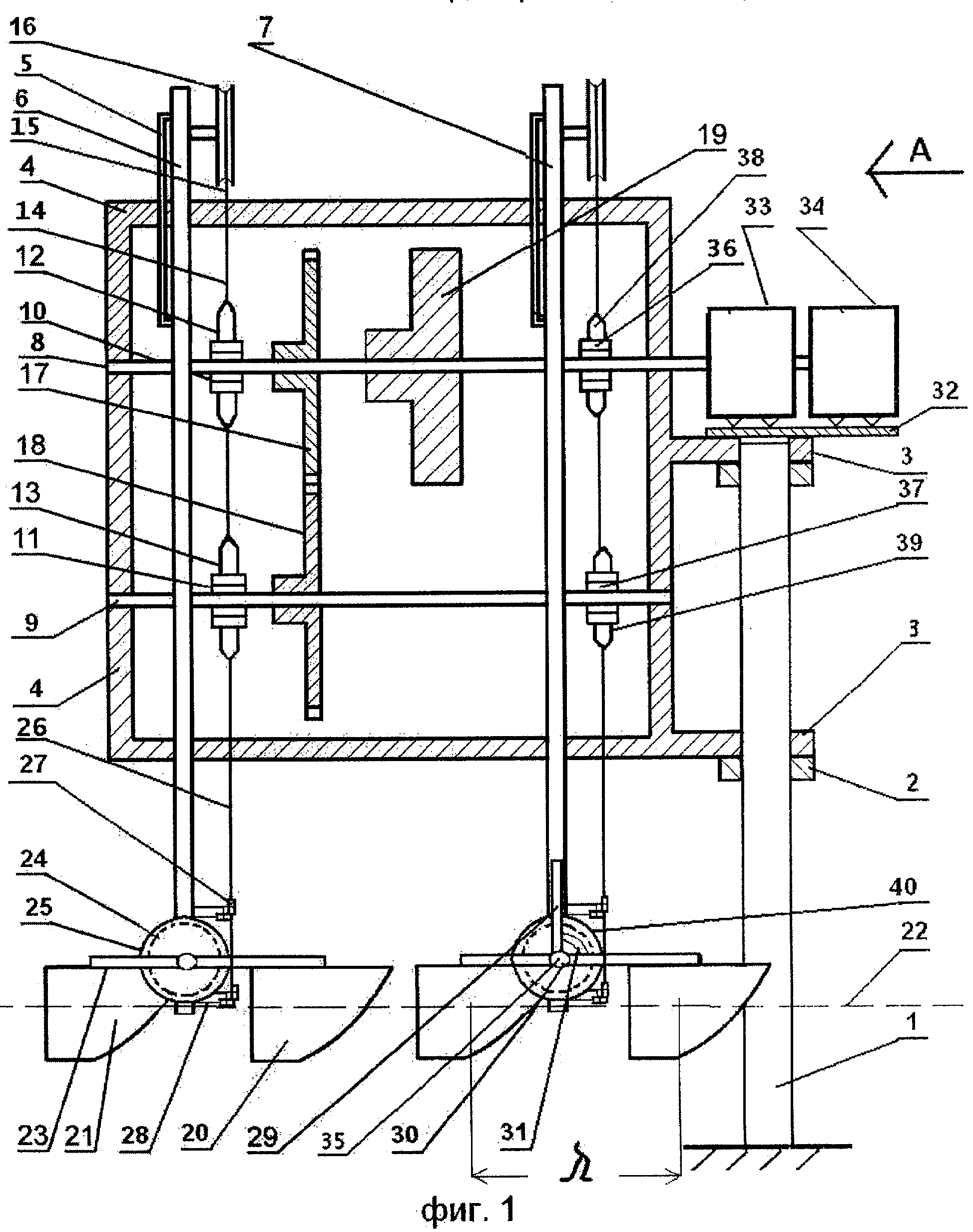
Конструкции преобразователя энергии волн приведены на фиг.1-фиг.7. На фиг.1 представлена конструкция первого варианта преобразователя энергии волн, где:
1 - вертикальная стойка;
2 - кольца упорные;
3 - кронштейн;
4 - рама прямоугольная;
5 - стержень направляющий;
6, 7 - первый и второй штоки;
8, 9- первый и второй валы;
10, 11- первая, вторая обгонные муфты;
12, 13 - первая и вторая звезды;
14 - первая цепь;
15 - первый трос;
16 - первый блок;
17, 18 - первая и вторая шестерни;
19 - маховик;
20, 21 - первая и вторая поплавковые камеры;
22 - уровень воды;
23 - рычаг;
24 - третья звезда;
25 - вторая цепь;
26 - второй трос;
27 - блочки;
28 - кронштейны;
29 - лопасть;
30 - первая пружина;
31 - упор;
λ - средняя длина морской волны;
32 - подставка;
33 - мультипликатор;
34 - электрогенератор;
35 - ось вращения лопасти;
36, 37 - третья и четвертая обгонные муфты;
38, 39, 40 - четвертая, пятая и шестая звезды.
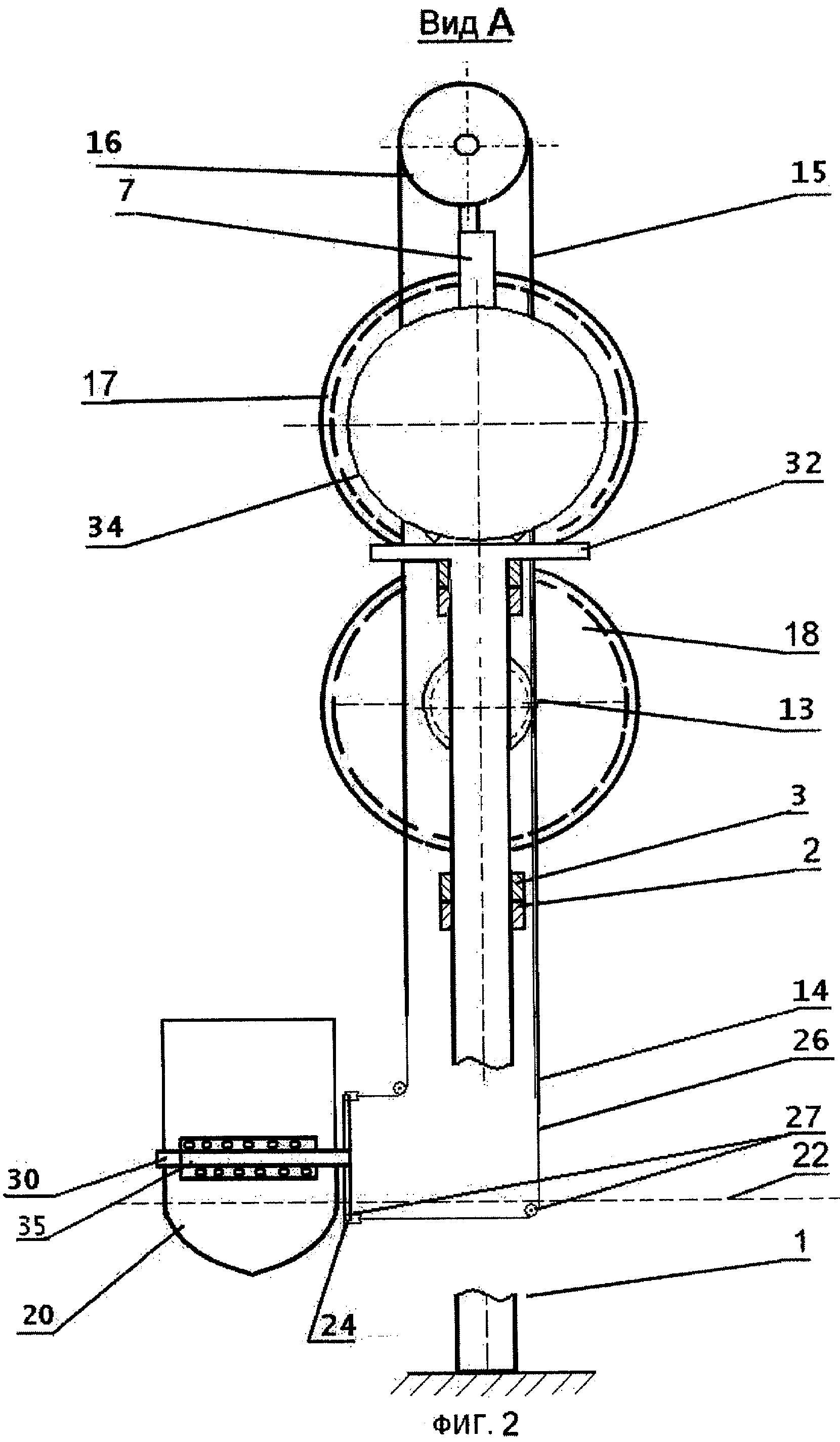
На фиг.2 представлен вид А преобразователя энергии по фиг.1, где позиции 1-40 те же, что на фиг.1
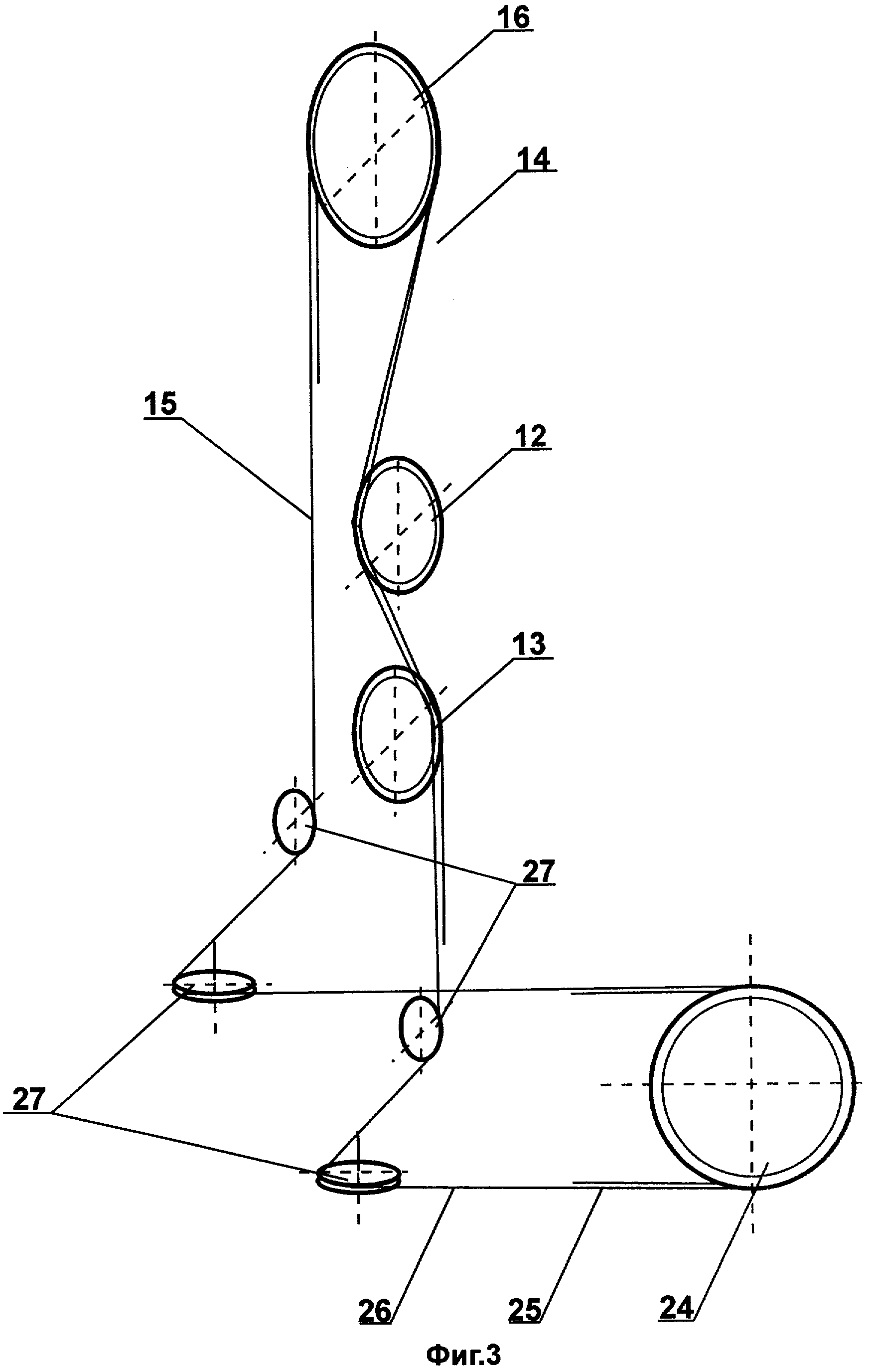
На фиг.3 представлена кинематическая схема цепной (14, 25) и тросовой (15, 26) связи между первой 12 второй 13 и третьей 24 звездами, где тросы 15, 26 перекинуты через первый блок 16 и блочки 27.
На фиг.4 представлена конструкция второго варианта преобразователя энергии, где позиции 1-40 те же, что на фиг.1-фиг.3;
41, 44 -седьмая, восьмая, девятая и десятая звезды;
45, 46 - третья и четвертая замкнутые цепи;
47, 48, 49, 50 - первая и вторая пара конических шестерен;
51, 52 - третья пара конических шестерен;
53, 54 - четвертая пара конических шестерен;
55 - общий (третий) выходной вал.
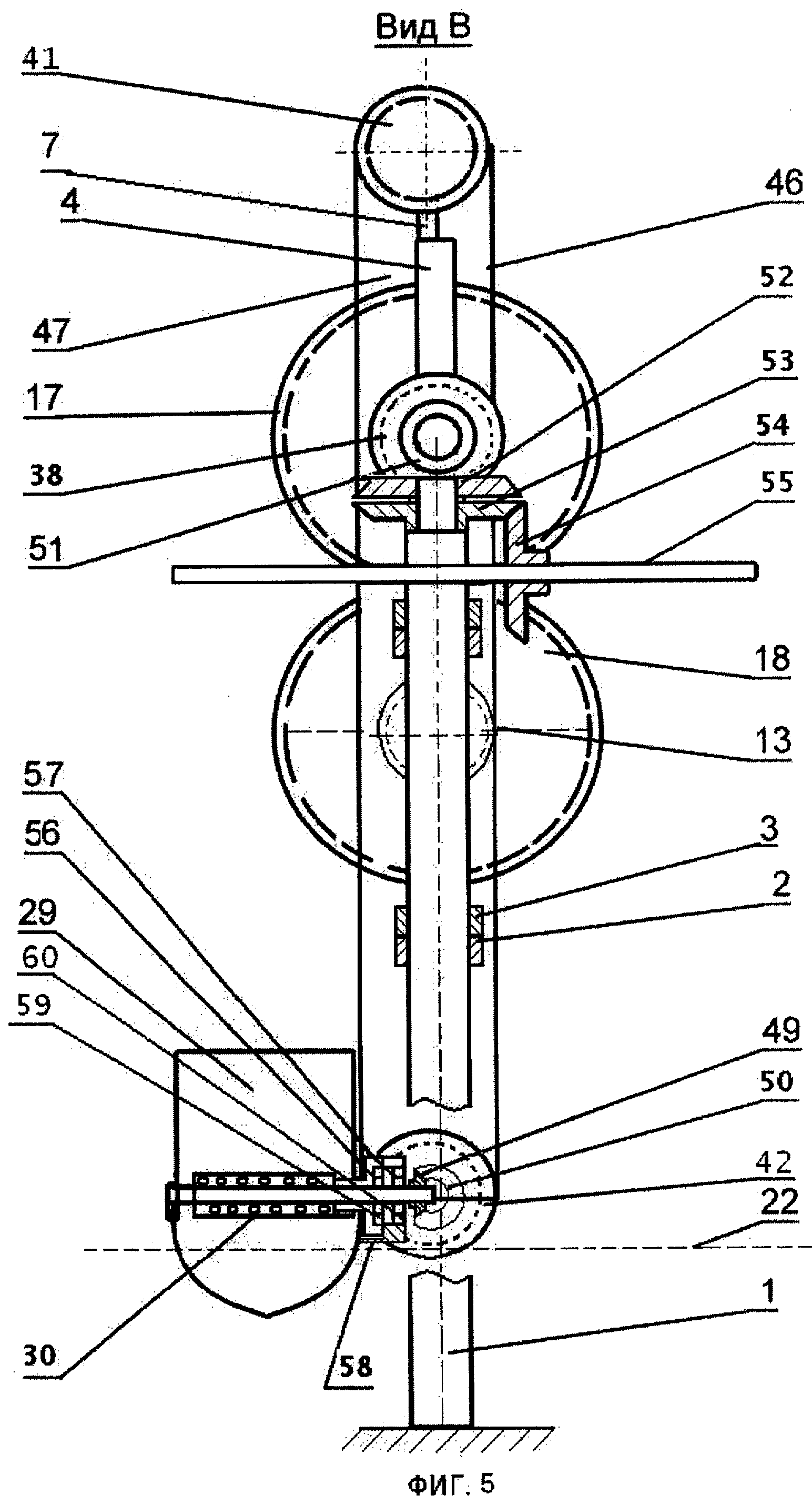
На фиг.5 представлен вид В на конструкцию второго варианта волнового двигателя, где позиции 1-55 те же, что на фиг.4;
56 - фланец;
57 - кольцо;
58 - перемычка;
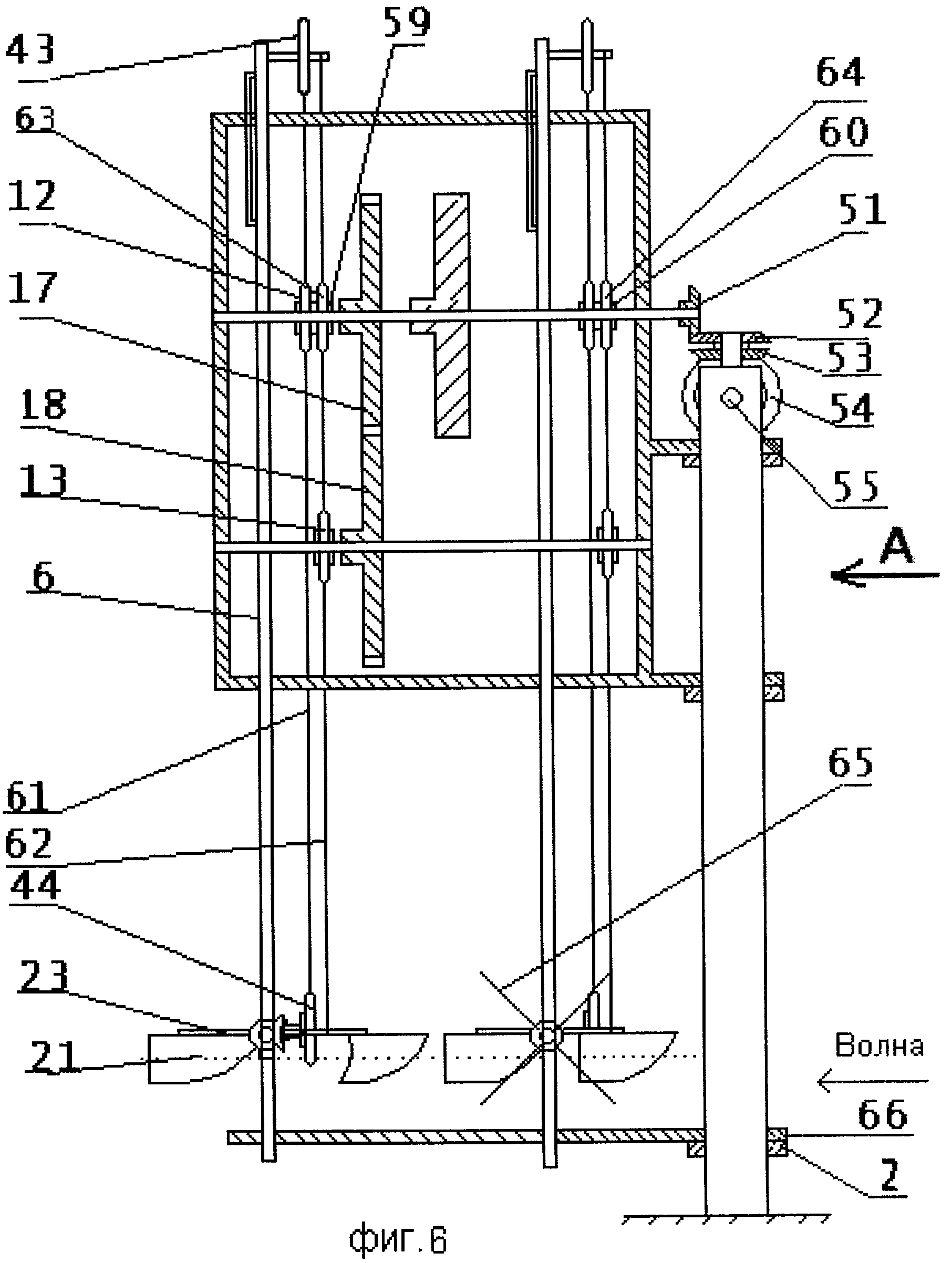
На фиг.6 представлена конструкция третьего варианта преобразователя энергии волн, где позиции 41-58 те же, что на фиг.5,
59, 60 - пятая и шестая обгонные муфты.
61 - пятая замкнутая цепь;
62 - шестая прямая цепь;
63, 64 - одиннадцатая, двенадцатая звезды;
65 - водяное колесо;
66 - направляющая рейка.
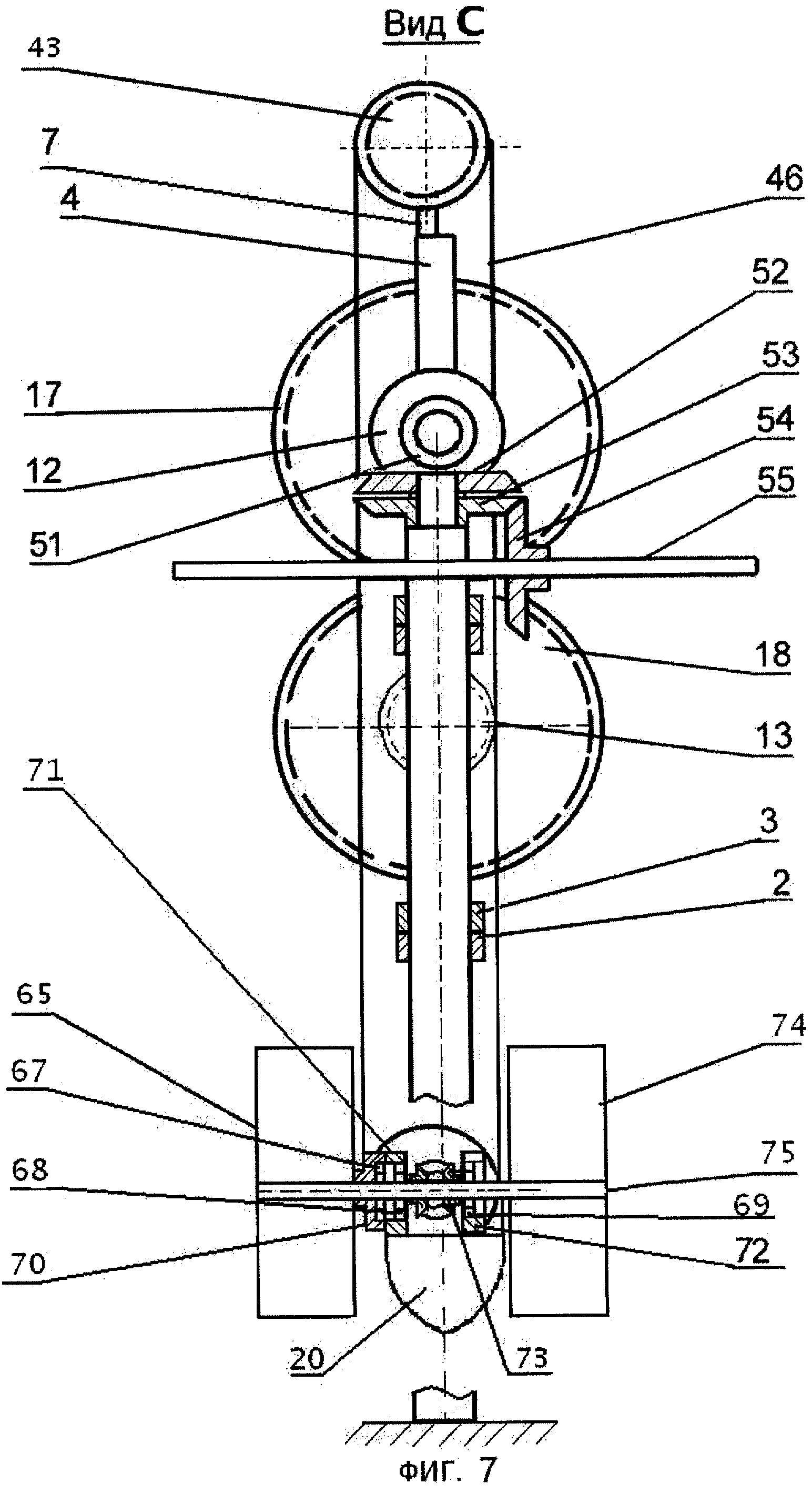
На фиг.7 представлен вид С по фиг.6, где позиции 2-66 те же, что на фиг.6;
67-69 - девятая, десятая и одиннадцатая обгонные муфты;
70 - второй фланец;
71-72 - второе и третье кольца;
73 - девятая коническая шестерня;
74 - второе водяное колесо;
75 - ось вращения лопастей.
Принцип работы первого варианта преобразователя энергии волн, конструкция которого представлена на фиг.1 и фиг.2, заключается в следующем.
Вертикальная стойка 1 устанавливается неподвижно в море у берега. На стойке установлены два упорных кольца 2. Прямоугольная рама 4, на которой монтируется преобразователь, с помощью кронштейнов 3 шарнирно устанавливается на упорных кольцах с возможностью свободного поворота вокруг стойки 1. Это необходимо в случае изменения направления ветра и волны.
По направлению движения волны на раме 4 вертикально установлены первый 6 и второй 7 штоки. Количество таких штоков могут быть больше двух (три, четыре и т.д.). Штоки 6, 7 имеют возможность свободного поступательного движения по вертикали.
На нижнем конце каждого из штоков установлена пара поплавковых герметичных камер 20, 21, связанных друг с другом рычагом 23. При этом на оси поворота первой поплавковой камеры установлена третья звезда 24, неподвижно связанная с рычагом 23.
На верхнем конце каждого штока установлен первый блок 16, через которого перекинут первый трос 15. Этот трос соединяет концы первый 14 и второй 25 цепей друг с другом. При этом другие концы указанных цепей соединяются с помощью второго троса 26.
Тросы 15 и 26 перекинуты через первый блок 16 и блочки 27 согласно кинематической схеме, представленной на фиг.3. Вращение третьей звездочки 24, связанной с поплавковыми камерами 20, 21, через цепную связь передается на первую 12 и вторую 13 звезды.
Данные звезды установлены с помощью первой 10 и второй обгонных муфт на соответствующих валах 8 и 9. При этом обгонные муфты установлены так, чтобы при перемещении первой цепи 14 вверх, первый 9 (верхний) вал вращается по часовой стрелке, а при смещении цепи вниз - второй 8 (нижний) вал вращается в обратную сторону (см. фиг.2). При этом верхняя обгонная муфта 10 обеспечивает свободный поворот первой звезды 12 вокруг вала 8. Таким образом, подъем первой поплавковой камеры 20 вверх приводит к вращению верхнего вала, а опускание камеры - к вращению нижнего. На каждом валу 8 и 9 неподвижно установлены соответствующие шестерни 17 и 18, входящие в сцепление друг с другом.
Вследствие того, что длина рычага 23, соединяющего первую и вторую поплавковые камеры друг с другом, равна λ/2, рычаг совершает колебательное движение с отклонением от горизонтального положения на угол α/2.
Эти колебания рычага 23 передаются на неподвижно связанную с ней третью звезду 24. Для передачи этих угловых колебаний из одной плоскости, по которой проходит волна, во взаимно перпендикулярную, в которой вращаются первая, вторая и третья звезды, в первом варианте (фиг.1, фиг.3) преобразователя использует трос, перекинутый через блочки. Во втором варианте (см. фиг.4 и фиг.5) для этой цели используется вторая пара конических шестерен 49, 50.
В первом варианте коэффициент преобразования угловых колебаний

Для стандартной цельной передачи m равен 12,7 мм. Для второго варианта преобразователя энергии линейные колебания цепи можно увеличить в n раз, где n равен коэффициенту передачи второй конической пары. Чтобы использовать энергию продольного движения волн, на оси вращения третьей звезды 24 устанавливается лопасть 29. Лопасть имеет плоскую или параболическую форму. Лопасть неподвижно связана с третьей звездой. С помощью пружины 30 лопасть устанавливается в вертикальное положение.
Под давлением волны лопасть и связанная с ней третья звезда вращаются вокруг оси шарнирного крепления. При этом пружина 30, закручиваясь, набирает энергию.
Лопасть устанавливается так, чтобы отобрать максимальную кинетическую энергию от продольного движения надвигающейся волны. В первом варианте преобразователя энергии лопасть устанавливается над рычагом. Так как расстояние между понтонами равно

Для этой же цели узел крепления лопасти может быть опущен вниз относительно поплавковых камер (понтонов), или рычаг необходимо закрепить к основаниям понтонов. Рычаг при этом поворачивается на дополнительный угол Δα2.
После ухода волны под воздействием накопленной энергии пружины лопасть возвращается в нейтральное вертикальное положение, вращая принудительно третью звезду обратно на угол -Δα. Такое же принудительное возвращение лопасти и рычага в нейтральное положение может обеспечить другая пружина, которая накапливает энергию при отклонении лопасти от горизонтали по часовой стрелке (при погружении первой камеры относительно второй).Таким образом, в первом варианте конструкции преобразователя энергии все виды движения совершаются относительно нейтральных точек. Это позволяет заменить цепь на трос на тех участках кинематической цепной связи (см. фиг.3), где цепь не взаимодействует с звездами.
Конические шестерни 51, 52, 53, 54, которые передают вращение от первого вала 8 на общий (третий) вал 55, позволяет в определенных пределах 90° менять угловое положение рамы 4 относительно стойки 1.
Выходной вал 56 является общим для параллельно работающих преобразователей, установленных вдоль берега моря.
Такое параллельное включение большого количества преобразователей энергии позволяет суммировать их моменты вращения и получить большие мощности на общем выходном валу, а также синхронизовать скорость его вращения.
Для синхронизации скорости вращения на выходном валу может быть установлен дополнительный массивный маховика, а также использована классическая система синхронизации с применением центробежного регулятора скорости вращения [3].
Во втором варианте преобразователя энергии для передачи угловых колебании рычага 23 из одной плоскости в другую, взаимно перпендикулярную первой, используется коническая пара шестерен 49, 50. Подбирая коэффициент передачи конической пары шестерен, а также путем изменения соотношения между числами зубцов третьей (Z3) и первой, второй (Z1, Z2) звезд, возможно создать необходимый момент вращения на выходном валу.
Во втором варианте на верхнем конце штанги взамен первого блока устанавливается четвертая звезда 47.
При этом диаметр и число зубцов четвертой и пятой звезд должны быть одинаковыми и больше соответствующих параметров первой и второй звезд. Кроме того, горизонтальное смещение штока от осей вращения первой и второй звезд должно быть такое, чтобы обеспечить надежное сцепление цепи 45 со всеми четырьмя звездами 12, 13, 41, 42. С другой стороны (передней) (см. фиг.4) замкнутая цепь не контактируется с первой 12 и второй 13 звездами, установленными на соответствующих обгонных муфтах 10, 11.
Так как все четыре звезды находятся в одной плоскости, кинематическая схема цепной связи между ними укрощается по сравнению с первым вариантом (см. фиг.3).
Во втором варианте конструкции преобразователя рычаг 23 и лопасть 29 связаны с конической парой шестерен через третью обгонную муфту 59. Эта муфта исполнения III, группы III [4]. Указанные муфты передают медленное и ускоренное вращение в двух направлениях.
Они могут быть получены установкой двух муфт с поводковой вилкой (исполнения III) так, чтобы зубцы ступицы были направлены в разные стороны.
Поводковая вилка муфты 59 связана с лопастью и может сообщить ступице ускоренное вращение в обе стороны, выталкивая ролики одного звена муфты и расклинивая ролики другого звена, увлекая при этом звенья за собой.
Линейное вертикальное смещение цепи 46
Во втором варианте преобразователя энергии, когда штоки крепятся к центрам первых понтонов 20, лопасти устанавливаются снизу относительно их осей вращения. При этом, когда первый понтон окажется на вершине гребня волны, на лопасть оказывается максимальное давление от продольного движения волны. Направление вертикального смещения цепи 46 сохраняется прежним в результате передачи вращения от лопасти 29 к звезде 44 через первую пару конических шестерен 49, 50.
Для наиболее эффективного преобразования кинетической энергии продольного движения волн на штоке устанавливается водяное колесо с четырьмя лопастями, сдвинутыми относительно друг друга на 90°. Число лопастей может быть более четырех. Так как ось вращения водяного колеса находятся выше уровня моря, допасти по очереди входят во встречный поток волн. Под давлением волн лопасти вращаются вокруг оси, что приводит к вращению выходного вала через обгонную муфту, конические шестерни и кинематически связанные с ними цепи и звездочки.
Для оптимального преобразования энергии объемы первой и второй поплавковых камер должны быть равны друг другу и при этом должны быть погружены на половину объема под собственным весом, весом штока и навешенных на него элементов конструкции преобразователя. Вес второй поплавковой камеры должен быть равен половине веса, вытесненной объемом камеры морской воды.
В этом случае моменты вращения, создаваемые с помощью первой и второй звезд, будут равны как при подъеме, так и при опускании первой цепи 14, цепей 45 и 46 или цепи 62.
Принцип работы третьего варианта преобразователя энергии волн (фиг.6) отличается от второго варианта (фиг.4 и фиг.5) повышенным КПД за счет использования моментов воздействия на выходной вал дополнительных сил.
Поставленная цель достигается путем введения дополнительной прямой цепи в каждый из двух преобразователей движения.
При использовании одной цепи воздействие разных видов движения на цепь (см. фиг.4 и фиг.5) может оказаться в противофазе. Моменты их воздействия на цепь имеют противоположные знаки и взаимно компенсируют друг друга. Так, например, подъем поплавка приводит к вращению цепи по часовой стрелке, а колебание рычага или лопасти - против часовой стрелки.
Принцип работы третьего варианта преобразователя энергии волн, конструкция которого представлена на фиг.6 и фиг.7, заключается в следующем.
На стойке 1 установлены два упорных кольца 2. Рама прямоугольная 4, на которой монтируется преобразователь, с помощью кронштейнов 3 шарнирно устанавливается на упорных кольцах с возможностью свободного поворота вокруг стойки 1, аналогично первому и второму варианту. Это необходимо в случае изменения направления ветра и волны.
По направлению движения волны на раме 4 вертикально установлены первый 6 и второй 7 штоки. Количество таких штоков может быть больше двух (три, четыре и т.д.). Штоки 6,7 имеют возможность свободного поступательного движения по вертикали.
Под воздействием волн на подводную часть преобразователя, т.е. на поплавковые камеры, они устанавливаются вдоль направления волн.
Конические шестерни 51, 52, 53, 54, которые передают вращение от первого вала 8 на общий выходной вал 55, к которому подключаются мультипликатор и электрогенератор, позволяет менять угловое положение рамы относительно направления волны в пределах ±90°. При этом выходной вал 55 является общим для параллельно работающих преобразователей, установленных вдоль берега моря. Такое параллельное включение большого количества преобразователей энергии позволяет получить большие мощности на общем выходном валу и синхронизирует скорость его вращения.
Для синхронизации скорости вращения на общем выходном валу 55 может быть установлен массивный маховик, а также использована классическая система синхронизации с применением центробежного регулятора скорости вращения [Алиев А.С. Преобразователь энергии текучей среды, патент РФ №2253039 от 07.04.2005 г.]В третьем варианте преобразователя энергии для передачи угловых колебании рычага 23 из одной плоскости в другую взаимно перпендикулярную первой, используется коническая пара шестерен 49, 50. Подбирая коэффициент передачи конической пары путем изменения соотношения между числами зубцов восьмой (Z8) 42 и первой, второй (Z1, Z2) 12, 13 звезд, возможно, создать необходимый момент вращения на выходном валу. В третьем варианте на верхнем конце штока 6 взамен первого блока 16 устанавливается девятая звезда 43.
При этом диаметр и число зубцов девятой и десятой 44 звезд должны быть одинаковыми и больше соответствующих параметров первой и второй звезд. Кроме того, горизонтальное смещение штока от осей вращения первой и второй звезд должно быть такое, чтобы обеспечить надежное сцепление цепи 61 со всеми тремя звездами 12, 43, 44. С другой стороны (передней) (см. фиг.6), замкнутая цепь 61 не контактируется с первой 12 звездой, установленной на обгонной муфте 10.
Линейное вертикальное смещение цепи 61
Для наиболее эффективного преобразования кинетической энергии продольного движения волн на 6 штоке устанавливается водяное колесо с четырьмя лопастями, сдвинутыми относительно друг друга на 90°. Число лопастей может быть более четырех. Так как оси вращения лопастей находятся выше уровня моря, допасти по очереди входят во встречный поток волн. Под давлением волн допасти вращаются вокруг оси и приводят к вращению выходного вала через обгонную муфту 67 конических шестерен и кинематически связанных с ними цепи 61 и звездочки 12.
При этом когда первый понтон окажется на вершине гребня волны, на лопасть оказывается максимальное давление от продольного движения волны. Направление вертикального смещения цепи 61 сохраняется прежним в результате передачи вращения от лопасти 29 к звезде 44 через первую пару конических шестерен 49, 50.
Для оптимального преобразования энергии объемы первой и второй поплавковых камер должны быть равны друг другу и должны быть погружены на половину объема под собственным весом вертикально двигающихся частей преобразователя движения, т.е. весом штока и навешенных на него элементов конструкции преобразователя. Вес второй поплавковой камеры должен быть равен половине веса вытесненной объемом камеры морской воды.
В этом случае моменты вращения, создаваемые с помощью первой и второй звезд, будут равны как при подъеме, так и при опускании цепей 14 или 62.
Повышение КПД обеспечивается за счет одновременного использования кинетической и потенциальной энергий волн.
Для этой цели вводится дополнительно прямолинейный шестой цепь 62 в каждый из двух преобразователей движения. При использовании одной цепи воздействия разных видов движения на цепь (см. фиг.4 и фиг.5) могут оказаться в противофазе. При этом моменты их воздействия на цепь имеют противоположные знаки и взаимно компенсируют друг друга. Так, например, подъем поплавка приводит к вращению цепи по часовой стрелке, а колебание рычага или лопасти - против часовой стрелки.
Введение второй цепи 62 и кинематически связанных с ним звезд 43, 13 позволяет суммировать моменты воздействия всех пяти видов движения: подъем и опускание первой поплавковой камеры, колебания рычага часовой и против часовой стрелки, а также вращение водяных колес 65, 74 по часовой стрелке.
Нижняя звездочка 44 устанавливается на одной оси неподвижно с ведомой конической шестерней.
Кроме того, на оси вращения ведущей конической шестерни 49 неподвижно установлены ступицы двух обгонных муфт 67, 68. При этом обойма обгонной муфты 68 связана через фланец 70 с водяным колесом 65, а обойма другой муфты 68 с помощью кольца неподвижно связана с рычагом 23. При этом направление вращения данных обгонных муфт совпадает. Ступица девятой обгонной муфта 69 связана с девятой конической шестерной 73. Обойма обгонной муфты 69 через кольцо 72 взаимодействует с рычагом 23.
Водяные колеса 65, 74 неподвижно связаны с фланцем 70. Для этой цели их неподвижно соединяют с осью 75. При этом ступицы обгонных муфт 67, 68, 69 и конические шестерни 49, 73 шарнирно установлены на оси 75 с возможностью свободного вращения.
При наличии таких кинематически связанных пяти обгонных муфт I группы [Анурьев В.И. Справочник конструктора машиностроителя. М. / "Машиностроение", 1980 г., том 2, стр.215-220] исключается взаимная компенсация моментов от сил воздействия указанных пяти движений элементов конструкции преобразователя от воздействия волн.
Направление вращения семи обгонных муфт устанавливается таким образом, чтобы первая цепь, вращающаяся по часовой стрелке, работала под воздействием вращения водяного колеса и поворота рычага 23 по часовой стрелке. При этом дополнительный момент вращения на валу создается еще за счет поступательного движения цепи вверх, которое осуществляется с помощью штока 6, связанной с первой поплавковой камерой 20.
Концы шестой цепи 62 неподвижно соединены с осями вращения седьмой 43 и восьмой 44 звезд.
Шестая цепь 62 совершает возвратно - поступательное движение и передает вращение на нижний (второй) вал 9 с помощью звезды 13 и обгонной муфты 11 при опускании штока 6 вниз. При движении цепи 62 вверх вращение передается верхнему валу 8 с помощью звезды 63, установленной на обгонной муфте. Таким образом, на нижний вал воздействует момент вращения от одной силы, а на верхний вал - четырех сил.
В результате моменты вращения от всех пяти сил складываются, что позволяет повысить КПД преобразователя энергии волн.
Верхняя звезда 43 свободно вращаются на оси, закрепленной к верхнему концу штока 6. Шток совершает возвратно-поступательное движение в вертикальном направлении под воздействием волн на поплавковую камеру 20.
Для исключения поворота штока и связанных с ним цепей вокруг оси шток и отверстия в раме 4 могут иметь прямоугольный профиль.
Могут быть и другие конструктивные решения. Например, направляющий стержень 5 соединяется параллельно со штоком или два штока меньшего сечения, могут быть соединены параллельно друг другу и т.д.
Следует заметить, в случае необходимости при соответствующем упрощении конструкции в преобразователе энергии волн может быть использовано каждое из ниже указанных движений в отдельности:
а) вертикальное движение первой герметичной камеры (понтона) вверх и вниз, преобразующее потенциальную энергию волн;
б) колебательное движение рычага, связывающего понтоны друг с другом, преобразующее также потенциальную энергию волн;
в) вращательное движение водяного колеса, преобразующее кинетическую энергию продольного потока волн.
Преобразователь энергии волн может найти применение для создания автономных источников электрической и механической энергии и тепла там, где нет централизованного электроснабжения.
Преобразователь энергии волн также может быть использован для создания лодок, гребной винт которых вращается от общего выходного вала через мультипликатор.
Потенциальными потребителями таких преобразователей являются пограничники, охотники, рыболовы, фермеры и т.д.
Реферат
Устройство предназначено для преобразования энергии волн в электрическую. Преобразователь содержит кинематически связанные неподвижную стойку, поплавковые камеры, раму, вал, мультипликатор и электрогенератор. Кроме того, преобразователь дополнительно содержит взаимодействующие друг с другом второй вал, первую и вторую шестерни и не менее двух преобразователей движения. При этом первая и вторая шестерни установлены неподвижно на соответствующих валах и взаимодействуют друг с другом. При этом каждый преобразователь движения содержит вертикальный шток, установленный с возможностью вертикальных колебаний, на верхнем конце которого установлен первый блок, а на нижнем - третья звезда, взаимодействующая с первым и вторым поплавковыми камерами. При этом первая и вторая обгонные муфты со звездами установлены на валах и взаимодействуют через первую и вторую цепи с третьей звездой. Конструкция преобразователя позволяет повысить КПД. 7 з.п. ф-лы, 7 ил.
Комментарии