Устройство для управления движением цилиндрического затвора гидравлической машины и гидравлическая машина, содержащая такое устройство - RU2546346C2
Код документа: RU2546346C2
Чертежи





Описание
Настоящее изобретение касается устройства для управления движением цилиндрического затвора гидравлической машины. Кроме того, настоящее изобретение касается гидравлической машины, содержащей такое устройство. Настоящее изобретение можно применять, в частности, в турбинах, насосах или насосотурбинах.
Известная гидравлическая машина содержит лопастное колесо и цилиндрический затвор для контроля подачи воды на лопастное колесо. Цилиндрический затвор выполнен подвижным с возможностью перемещения между положением открывания и положением перекрывания трубопровода подачи воды на лопастное колесо. Движением цилиндрического затвора между его положениями открывания и перекрывания управляет электрогидравлическое устройство управления.
Известное устройство управления содержит двухступенчатые гидравлические цилиндры, каждый из которых содержит шток и поршень, который разделяет две камеры, предназначенные для заполнения рабочей жидкостью гидроцилиндра. Такое устройство управления требует также наличия механических компонентов для синхронизации перемещений поршней гидроцилиндров. В частности, среди механических компонентов, связанных с каждым гидроцилиндром, реверсивная пара винт-гайка преобразует поступательное движение поршня и штока во вращение шестерни, внешней по отношению к гидроцилиндру. Кроме того, шестерни связаны между собой трансмиссией таким образом, чтобы синхронизировать их вращения и, следовательно, синхронизировать поступательные движения поршней различных гидроцилиндров.
Однако это устройство управления содержит для каждого гидроцилиндра несколько механических компонентов, которые требуют сложных регулировок и трудоемких операций по обслуживанию.
Задачей настоящего изобретения является устранение этих недостатков и создание надежного и простого в регулировке устройства управления.
Для решения этой задачи предлагается устройство для управления перемещением цилиндрического затвора гидравлической машины, содержащей лопастное колесо, при этом цилиндрический затвор ограничивает замкнутый контур и выполнен подвижным с возможностью перемещения между положением открывания и положением перекрывания, по меньшей мере, одного трубопровода подачи воды на лопастное колесо, при этом устройство содержит, по меньшей мере, четыре двухступенчатых гидроцилиндра, при этом каждый гидроцилиндр содержит:
- шток,
- поршень,
- первую камеру и
- вторую камеру,
при этом первая камера и вторая камеры выполнены с возможностью заполнения рабочей жидкостью, при этом поршень связан со штоком таким образом, чтобы отделять первую камеру от второй камеры, при этом первая камера находится со стороны штока по отношению к поршню, и вторая камера находится со стороны, противоположной штоку, по отношению к поршню, при этом штоки выполнены с возможностью соединения с цилиндрическим затвором в местах, расположенных на периметре, совпадающем с контуром цилиндрического затвора.
Устройство дополнительно содержит, по меньшей мере, два гидравлических органа синхронизации расстояний, проходимых поршнями в главном направлении перемещения цилиндрического затвора, при этом гидравлические органы синхронизации соединены с гидроцилиндрами таким образом, чтобы образовать, по меньшей мере, две разные группы гидроцилиндров, при этом каждая группа объединяет, по меньшей мере, два гидроцилиндра, соединенные, по меньшей мере, одним гидравлическим органом синхронизации, при этом два гидроцилиндра, принадлежащие к двум разным группам, не соединены гидравлическим органом синхронизации.
Таким образом, устройство управления в соответствии с изобретением позволяет эффективно синхронизировать гидроцилиндры.
Согласно другим предпочтительным, но факультативным отличительным признакам изобретения, взятым отдельно или в любой другой технически возможной комбинации:
- места распределены по периметру таким образом, чтобы жесткость цилиндрического затвора способствовала синхронизации расстояний, проходимых поршнями, принадлежащими к разным группам, в главном направлении перемещения цилиндрического затвора;
- по меньшей мере, один гидравлический орган синхронизации содержит канал, выполненный с возможностью последовательного соединения, по меньшей мере, двух гидроцилиндров, принадлежащих к одной группе, а именно первого гидроцилиндра и второго гидроцилиндра, при этом упомянутый гидравлический орган синхронизации выполнен с возможностью пропускания потока рабочей жидкости из первой камеры первого гидроцилиндра во вторую камеру второго гидроцилиндра, при этом второй гидроцилиндр следует в своей группе за первым гидроцилиндром, при этом площадь стороны поршня, ограничивающей первую камеру первого гидроцилиндра, приблизительно равна площади стороны поршня, ограничивающей вторую камеру второго гидроцилиндра;
- число гидроцилиндров составляет от 5 до 30;
- группы объединяют одинаковое число гидроцилиндров;
- устройство содержит, по меньшей мере, три группы гидроцилиндров, и каждая группа объединяет два гидроцилиндра;
- два последовательных места на упомянутом периметре соответствуют гидроцилиндрам, принадлежащим к двум разным группам;
- места равномерно распределены на упомянутом периметре, при этом упомянутый периметр имеет форму окружности, и места, соответствующие двум гидроцилиндрам группы, являются диаметрально противоположными;
- первая камера и вторая камера каждого гидроцилиндра имеют общую форму цилиндра с круглыми основаниями;
- для первого гидроцилиндра и второго гидроцилиндра, принадлежащих к одной группе, разность между квадратом внутреннего диаметра первого гидроцилиндра и квадратом внутреннего диаметра второго гидроцилиндра равна квадрату диаметра штока первого гидроцилиндра;
- устройство дополнительно содержит блок управления и средства дискретной подачи и/или дискретного удаления рабочей жидкости для каждого гидроцилиндра, при этом каждый гидроцилиндр оборудован, по меньшей мере, одним датчиком, выполненным с возможностью подачи сигналов, характеризующих положение соответствующего поршня в направлении работы гидроцилиндра, при этом блок управления выполнен с возможностью приема упомянутых сигналов и управления средствами дискретной подачи и/или дискретного удаления с учетом отклонений положений в главном направлении перемещения цилиндрического затвора между гидроцилиндрами, принадлежащими к одной группе; и
- устройство дополнительно содержит средства непрерывной подачи и/или непрерывного удаления рабочей жидкости для гидроцилиндров, и блок управления выполнен с возможностью приема упомянутых сигналов и управления средствами непрерывной подачи и/или непрерывного удаления с учетом отклонений положений между гидроцилиндрами, принадлежащими к разным группам.
Объектом настоящего изобретения является также гидравлическая машина типа турбины, насоса или насосотурбины, содержащая лопастное колесо и цилиндрический затвор, выполненный подвижным с возможностью перемещения между положением открывания и положением перекрывания, по меньшей мере, одного трубопровода подачи воды на лопастное колесо, при этом гидравлическая машина отличается тем, что дополнительно содержит описанное выше устройство.
Настоящее изобретение будет более очевидно из нижеследующего описания, представленного исключительно в качестве не ограничительного примера, со ссылками на прилагаемые чертежи, на которых:
Фиг. 1 изображает схематичный вид устройства согласно первому варианту осуществления изобретения.
Фиг. 2 - вид в разрезе гидравлической машины в соответствии с изобретением, содержащей устройство, показанное на фиг. 1.
Фиг. 3 - увеличенный вид детали III фиг. 1.
Фиг. 4 - вид в сечении в направлении стрелок IV-IV фиг. 3.
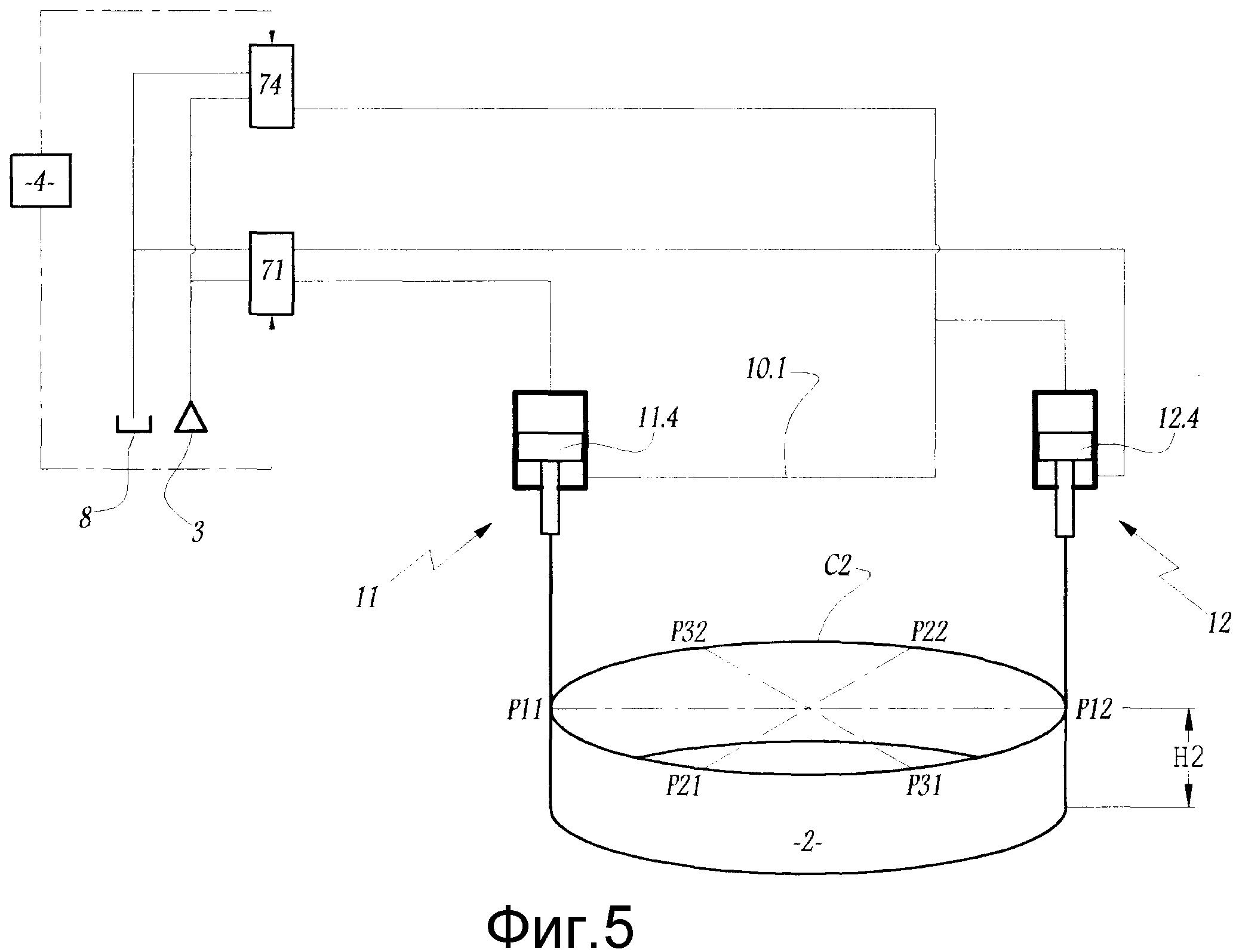
Фиг. 5 - схематичный вид с показом в изометрии части устройства управления, показанного на фиг. 1.
Фиг. 6 - схематичный вид цилиндрического затвора в статической фазе, схематично показанной на фиг. 1.
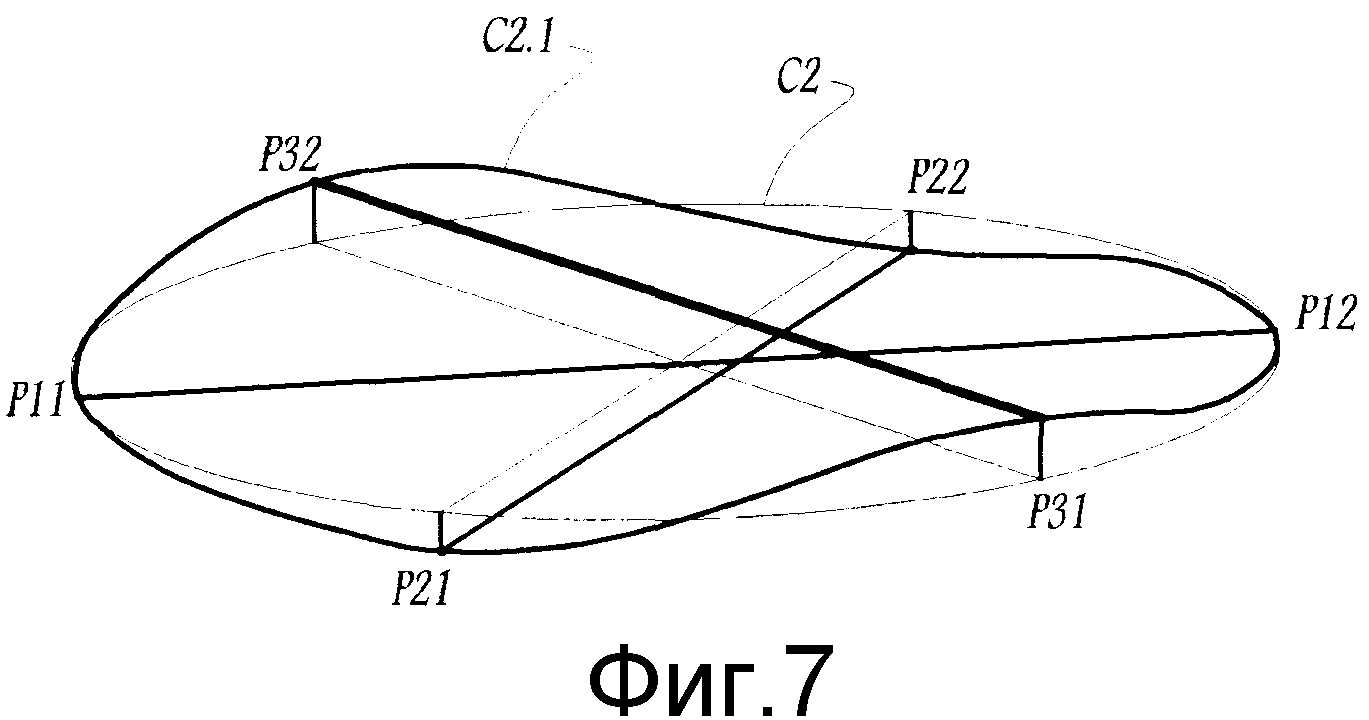
Фиг. 7 - вид, аналогичный фиг. 6, цилиндрического затвора, показанного на фиг. 6, в динамической фазе.
Фиг. 8 - вид, аналогичный фиг. 1, устройства управления согласно второму варианту осуществления изобретения.
На фиг. 1 показано устройство для управления перемещением цилиндрического затвора 2. Цилиндрический затвор 2 схематично обозначен пунктирными линиями на фиг. 1 и показан в перспективе на фиг. 6. В целом цилиндрический затвор 2 ограничивает замкнутый контур, как показано на фиг. 6. Иначе говоря, цилиндрический затвор 2 в основном имеет кольцевую форму. В примере, показанном на фиг. 6, цилиндрический затвор 2 имеет форму цилиндрического кольца с круглым основанием и с осью Y2-Y'2, показанной на фиг. 2. На фиг. 1 цилиндрический затвор 2 схематично показан в виде развертки для облегчения понимания фиг. 1.
Как показано на фиг. 2, гидравлическая машина М в соответствии с изобретением содержит лопастное колесо R, цилиндрический затвор 2 и устройство 1. Цилиндрический затвор 2 перемещается в главном направлении Y, которое является вертикальным и параллельным оси Y2-Y'2, показанной на фигурах. Цилиндрический затвор 2 может перемещаться между положением открывания и положением перекрывания (фиг. 2) трубопровода 5 подачи воды на лопастное колесо R. В случае гидравлической машины М, которая может быть машиной типа турбины, насоса или насосотурбины, трубопровод 5 образован кожухом, называемым «лотком». Цилиндрический затвор 2 установлен между подвижными передними направляющими 9 и направляющими 6, которые служат для направления водяного потока на лопастное колесо R.
Как показано на фиг. 1 и 2, устройство 1 содержит двухступенчатые гидравлические цилиндры 11, 12, 21, 22, 31 и 32, каждый из которых содержит:
- шток 11.3, 12.3 или эквиваленты;
- поршень 11.4, 12.4 или эквиваленты;
- первую камеру 11.1, 12.1 или эквиваленты и
- вторую камеру 11.2, 12.2 или эквиваленты.
Поскольку гидроцилиндры 11, 21 и 31 с одной стороны и гидроцилиндры 22, 22 и 32 с другой стороны являются подобными или идентичными, ниже детально будут описаны только гидроцилиндры 11 и 12. Описание гидроцилиндров 11 и 12, представленное ниже со ссылками на фигуры, можно транспонировать на гидроцилиндры 21, 22, 31 и 32.
Поскольку гидроцилиндры 11 и 12 являются двухступенчатыми гидравлическими цилиндрами, их первые камеры 11.1 и 12.1 и их вторые камеры 11.2 и 12.2 выполнены с возможностью заполнения рабочей жидкостью, такой как масло. Поршни 11.4 и 12.4 имеют в основном плоские стороны. Каждый поршень 11.4 или 12.4 соединен с соответствующим штоком 11.3 или 12.3 таким образом, чтобы отделять первую соответствующую камеру 11.1 или 12.1 от второй соответствующей камеры 11.2 или 12.2.
Первая камера 11.1 или 12.1 и вторая камера 11.2 или 12.2 каждого гидроцилиндра 11 и 12 в основном имеют форму цилиндра с круглыми основаниями. Точно так же шток 11.3 имеет цилиндрическую форму. Каждая первая камера 11.1 или 12.1 расположена относительно поршня 11.4 или 12.4 со стороны соответствующего штока 11.3 или 12.3, тогда как каждая вторая камера 11.2 или 12.2 расположена относительно поршня 11.4 или 12.4 со стороны, противоположной соответствующему штоку 11.3 или 12.3. Иначе говоря, шток 11.3 или 12.3 частично заходит в соответствующую первую камеру 11.1 или 12.1, тогда как вторая камера 11.2 или 12.2 содержит только рабочую жидкость.
Штоки 11.3, 12.3 или эквиваленты выполнены с возможностью соединения с цилиндрическим затвором 2 в местах Р11, Р12, Р21, Р22, Р31 и Р32, расположенных по периметру С2, совпадающему с контуром цилиндрического затвора 2. В настоящей заявке глагол «соединять» относится к механическому соединению.
В данном случае один конец каждого штока 11.3 или 12.3 закреплен непосредственно на окружном контуре цилиндрического затвора 2. Поскольку периметр С2, на котором находятся места Р11, Р12, Р21, Р22, Р31 и Р32 соединения между штоками 11.3, 12.3 и эквивалентами и цилиндрическим затвором 2, совпадает с окружным контуром цилиндрического затвора 2, этот периметр С2 тоже является окружным.
Устройство 1 содержит три канала 10.1, 20.1 и 30.1, которые выполнены с возможностью последовательного соединения соответствующих гидроцилиндров 11 и 12, 21 и 22 или 31 и 32. Так, канал 10.1 последовательно соединяет гидроцилиндры 11 и 12. Канал 20.1 последовательно соединяет гидроцилиндры 21 и 22. Канал 30.1 последовательно соединяет гидроцилиндры 31 и 32.
В настоящей заявке глаголы «соединять», «связывать», «подключать» и «проводить», а также их производные обозначают «устанавливать гидравлическое сообщение». Прилагательное «гидравлический» может относиться к рабочей жидкости гидроцилиндров, такой как масло, или к воде, циркулирующей в гидравлической машине.
Канал 10.1 образует гидравлический орган синхронизации, так как он позволяет синхронизировать расстояния, проходимые поршнями 11.4 и 12.4 в направлении Y. Максимальное расстояние, которое может проходить поршень 11.4 в направлении Y, соответствует общему ходу поршня 11.4 в гидроцилиндре 11. Аналогично каналу 10.1 каждый канал 20.1 или 30.1 позволяет синхронизировать расстояния, проходимые поршнями гидроцилиндров 21 и 22 с одной стороны и 31 и 32 с другой стороны в направлении Y. В примере, представленном на фигурах, поршни 11.4, 12.4 и эквиваленты перемещаются параллельно и в одном направлении Y.
Гидравлические органы синхронизации, образованные каналами 10.1, 20.1 и 30.1, соединены с гидроцилиндрами 11, 12, 21, 22, 31 и 32, образуя три разные группы 10, 20 и 30. В данном случае каждая группа 10, 20 или 30 объединяет два гидроцилиндра 11 и 12, 21 и 22 или 31 и 32. Таким образом, два гидроцилиндра 11 и 12, 21 и 22 или 31 и 32, принадлежащие к одной группе 10, 20 или 30, последовательно соединены соответствующим каналом 10.1, 20.1 или 30.1. Вместе с тем, два гидроцилиндра 11-21, 12-22, принадлежащие к разным группам 10, 20, не соединены каналом 10.1, 20.1 или 30.1. Ниже подробно со ссылками на фигуры будет описан конкретный вариант синхронизации.
В настоящей заявке термин «группа» обозначает совокупность, по меньшей мере, из двух гидроцилиндров, соединенных, по меньшей мере, одним гидравлическим органом синхронизации. Группы 10, 20 и 30 объединяют одинаковое число гидроцилиндров, то есть два гидроцилиндра каждая. Устройство 1 содержит три группы 10, 20 и 30, каждая из которых объединяет два гидроцилиндра 11 и 12, 21 и 22, 31 и 32.
Кроме того, как показано на фиг. 5, 6 и 7, места Р11, Р12, Р21, Р22, Р31 и Р32, соответствующие гидроцилиндрам 11, 12, 21, 22, 31 и 32, распределены по периметру С2 таким образом, чтобы жесткость цилиндрического затвора 2 способствовала синхронизации расстояний, которые проходят поршни в направлении Y, например 11.4 и 21.4, принадлежащие к разным группам 10, 20 и 30.
На периметре С2 два последовательных места соответствуют гидроцилиндрам, принадлежащим к двум разным группам 10, 20 и 30. Так места Р11 и Р21 соответствуют гидроцилиндрам 11 и 21, которые принадлежат соответственно к группе 10 и к группе 20. Такая последовательность позволяет чередовать места Р11, Р12, Р21, Р22, Р31 и Р32, что способствует синхронизации поршней гидроцилиндров, что будет описано ниже.
В примере, представленном на фиг. 5-7, места Р11, Р12, Р21, Р22, Р31 и Р32 равномерно распределены по периметру С2. Иначе говоря, два последовательных места Р11 и Р21 разделены углом 60° в центре периметра С2 окружной формы. Кроме того, места, соответствующие двум гидроцилиндрам каждой из групп 10, 20 и 30, являются диаметрально противоположными на периметре С2. Например, места Р11 и Р12, соответствующие гидроцилиндрам 11 и 12 группы 10, являются диаметрально противоположными. Такое распределение мест, соответствующих гидроцилиндрам, обеспечивает эффективную механическую синхронизацию за счет жесткости цилиндрического затвора 2.
На фиг. 1 два гидроцилиндра каждой группы 10, 20 или 30 схематично показаны в смежных местах. Однако фиг. 1 предназначена для схематичного показа электрических цепей и гидравлических контуров устройства 1 и не для показа реальных мест гидроцилиндров или компонентов устройства 1 относительно цилиндрического затвора 2. Эти реальные места показаны на фиг. 2 и 5-7. Для упрощения фиг. 5 на ней показаны только гидроцилиндры 11 и 12.
На фиг. 6 символично показан контур цилиндрического затвора 2, совпадающий с периметром С2, когда гидроцилиндры находятся в статической фазе, то есть когда цилиндрический затвор 2 не находится в процессе перемещения, так как находится в положении открывания или в положении перекрывания. На фиг. 7 символично показан периметр С2, когда гидроцилиндры находятся в динамической фазе, то есть когда цилиндрический затвор 2 находится в процессе перемещения.
В динамической фазе верхний контур цилиндрического затвора 2, совпадающий с периметром С2, деформируется, и эта деформация отображена на фиг. 7 в виде периметра С2.1. Для лучшего понимания фиг.7, периметр С2.1 отображает линию деформации периметра С2 с преувеличением. Действительно, в зависимости от усилий, действующих на цилиндрический затвор 2 со стороны внешних элементов, например от гидравлических сил или сил трения, синхронизация гидроцилиндров не является идеальной и существуют отклонения между группами 10, 20 и 30. Так, в направлении подъема цилиндрического затвора 2 гидроцилиндры 31 и 32 могут работать «с опережением», тогда как гидроцилиндры 21 и 22 могут «запаздывать» по отношению к гидроцилиндрам 11 и 12.
Поскольку места Р11, Р12, Р21, Р22, Р31 и Р32 распределены по периметру С2, жесткость цилиндрического затвора 2 обеспечивает механическую синхронизацию расстояний, которые проходят поршни, такие как 11.4 и 21.4, принадлежащие к разным группам 10, 20 и 30. Жесткость цилиндрического затвора 2 определена его размерами и упругостью материала, из которого он изготовлен.
Диаметр периметра С2, соответствующего цилиндрическому затвору 2, может, например, составлять от 2 м до 15 м. Материалом цилиндрического затвора 2 может быть, например, сталь. Высота Н2 цилиндрического затвора 2, измеренная вдоль направления Y, может составлять от 0,25 м до 3 м. Толщина цилиндрического затвора 2, измеренная в радиальном направлении перпендикулярно к направлению Y, может составлять от 30 мм до 300 мм.
Говоря другими словами, жесткость цилиндрического затвора 2 стремится привести периметр С2.1 деформации в динамической фазе ближе к периметру С2, совпадающему с контуром цилиндрического затвора 2 в статической фазе, преодолевая усилия, которые привели к деформации цилиндрического затвора 2. Жесткость цилиндрического затвора 2 способствует синхронизации гидроцилиндров разных групп 10, 20 и 30. В примере, показанном на фиг. 7, жесткость цилиндрического затвора 2 «тормозит» опережающие гидроцилиндры 31 и 32 и «ускоряет» запаздывающие гидроцилиндры 21 и 22 на уровне гидроцилиндров 11 и 12.
Ниже со ссылками на фиг. 1-4 описана гидравлическая синхронизация между гидроцилиндрами одной группы, в частности между гидроцилиндрами 11 и 12. Когда цилиндрический затвор 2 перемещается в направлении Y и в сторону опускания, рабочая жидкость перетекает из первого гидроцилиндра 11 во второй гидроцилиндр 12. Термины «первый» и «второй» выбраны произвольно, чтобы обозначить два последовательных гидроцилиндра одной группы.
Канал 10.1 или гидравлический орган синхронизации выполнен с возможностью пропускания рабочей жидкости между первой камерой 11.1 первого гидроцилиндра 11 и второй камерой 12.2 второго гидроцилиндра 12. Второй гидроцилиндр 12 следует в группе 10 за первым гидроцилиндром 11. Иначе говоря, канал 10.1 соединяет отверстие нагнетания/питания первой камеры 11.1 первого гидроцилиндра 11 с отверстием питания/нагнетания второй камеры 12.2 второго гидроцилиндра 12.
Кроме того, как показано на фиг. 3 и 4, площадь S11.41 стороны 11.41 поршня 11.4, которая ограничивает первую камеру 11.1 первого гидроцилиндра 11, приблизительно равна площади S12.42 стороны 12.42 поршня 12.4, ограничивающей вторую камеру 12.2 второго гидроцилиндра 12. Площади S11.41 и S12.42 соответствуют проходным сечениям первой камеры 11.1 гидроцилиндра 11 и второй камеры 12.2 гидроцилиндра 12.
В настоящей заявке термин «приблизительно» используется, чтобы учитывать допуски при изготовлении деталей гидроцилиндров. Равенства между площадями S11.41 и S12.42 достигают посредством расчета размеров гидроцилиндров 11 и 12 согласно следующему отношению:
D112=D122+D11.32 (1)
где:
- D11 является внутренним диаметром гидроцилиндра 11,
- D12 является внутренним диаметром гидроцилиндра 12 и
- D11.3 является диаметром штока 11.3.
Таким образом, внутренний диаметр D11 гидроцилиндра 11 превышает внутренний диаметр гидроцилиндра D12.
В целом, для первого гидроцилиндра и второго гидроцилиндра, принадлежащих к одной группе, в частности к группе, содержащей более двух гидроцилиндров, разность между квадратом внутреннего диаметра первого гидроцилиндра и квадратом внутреннего диаметра второго гидроцилиндра равна квадрату диаметра штока первого гидроцилиндра.
Как показано на фиг. 4, сторона 11.41 имеет форму венца, тогда как сторона 12.42 имеет форму сплошного диска. Площадь S11.41 равна:
S11.41=π·(D11)2/4-π·(D11.3)2/4 (2)
Кроме того, площадь S12.42 равна:
S12.42=π·(D12)2/4 (3)
Равенство между площадями S11.41 и S12.42 позволят поршням 11.4 и 12.4 гидроцилиндров 11 и 12 перемещаться на одинаковое расстояние, когда объем рабочей жидкости переходит из гидроцилиндра 11 в гидроцилиндр 12 через канал 10.1, который образует гидравлический орган синхронизации поршней 11.4 и 12.4.
Кроме того, устройство 1 содержит блок 4 управления, три пропорциональных распределителя 71, 72 и 73, а также три распределителя 74, 75 и 76. Каждый пропорциональный распределитель 71, 72 или 73 соединен с соответствующей группой 10, 20 или 30. Каждый пропорциональный распределитель 71, 72 или 73 имеет четыре входа и три положения. Блок 4 управления и пропорциональные распределители 71, 72 и 73 позволяют управлять потоками рабочей жидкости между источником 3 гидравлической жидкости, гидроцилиндрами 11, 12, 21, 22, 31 и 32 и коллектором или стоком 8.
Во время работы, чтобы переместить цилиндрический затвор 2 в направлении опускания, блок 4 управления управляет пропорциональными распределителями 71, 72 и 73 таким образом, чтобы рабочая жидкость перетекала от источника 3 во вторые камеры 11.2 и их эквиваленты первых гидроцилиндров 11, 21 и 31. Соответственно рабочая жидкость, присутствующая в первых камерах 11.1 и эквивалентах «первых» гидроцилиндров 11, 21 и 31, проходит в каналах 10.1, 20.1 и 30.1 соответственно в направлении вторых камер 12.2 и эквивалентов «вторых» гидроцилиндров 12, 22 и 32. Таким образом, каналы 10.1, 20.1 и 30.1 выполняют свою функцию гидравлических органов синхронизации поршней 11.4, 12.4 и их эквивалентов. Каждый канал 10.1, 20.1 или 30.1 синхронизирует два поршня 11.4 и 12.4 гидроцилиндров, принадлежащих к одной группе 10, 20 или 30.
Для перемещения цилиндрического затвора 2 в направлении подъема блок 4 управления управляет пропорциональными распределителями 71, 72 и 73 таким образом, чтобы рабочая жидкость протекала в направлениях, противоположных описанному выше опусканию цилиндрического затвора 2.
Как показано на фиг. 1 и 5, устройство 1 дополнительно содержит распределители 74, 75 и 76, соединенные соответственно с каждым каналом 10.1, 20.1 и 30.1. Распределители 74, 75 и 76 подключены к источнику 3 и к стоку 8. В каждой группе 10, 20 или 30 соответствующий распределитель 74, 75 или 76 выполняет функцию средства дискретной подачи и/или дискретного удаления рабочей жидкости для каждого гидроцилиндра 11 и 12 и эквивалентов.
В настоящей заявке термин «дискретный» применен по отношению к прохождению при подаче или при удалении небольших объемов рабочей жидкости в отличие от «непрерывных» потоков большого объема рабочей жидкости. Средство «непрерывной» подачи и/или «непрерывного» удаления рабочей жидкости применяют для перемещения цилиндрического затвора по большой амплитуде, как правило, чтобы перевести его из положения открывания в положение перекрывания. Средство «дискретной» подачи и/или «дискретного» удаления рабочей жидкости применяют для перемещения штоков и поршней некоторых гидроцилиндров по малой амплитуде, при этом цилиндрический затвор перемещается на незначительное или нулевое расстояние.
Каждый гидроцилиндр 11, 12, 21, 22, 31 или 32 оборудован датчиком 11.5, 12.5 и эквивалентом, выполненным с возможностью подачи сигналов, характеризующих положение соответствующих поршней 11.4, 12.4 и эквивалентов вдоль направления Y. Как показано на фиг. 1, блок 4 управления электрически связан с каждым датчиком 11.5, 12.5 и эквивалентом таким образом, чтобы принимать эти сигналы.
Блок 4 управления выполнен с возможностью управления каждым распределителем 74, 75 или 76 с учетом отклонений положений в направлении Y между поршнями 11.4 и 12.4 гидроцилиндров 11 и 12, принадлежащих к одной группе 10, 20 или 30. Иначе говоря, каждый распределитель 74, 75 или 76 позволяет точно синхронизировать поршни гидроцилиндров, принадлежащих к одной группе.
Блок 4 управления выполнен с возможностью управления пропорциональными распределителями 71, 72 и 73, выполняющими функции непрерывной подачи и/или непрерывного удаления рабочей среды для соответствующих гидроцилиндров 11-12, 21-22 или 31-32, с учетом отклонений положений между поршнями гидроцилиндров, принадлежащих к разным группам, таким как 10 и 20, таких как гидроцилиндры 11 и 21. Иначе говоря, каждый пропорциональный распределитель 71, 72 или 73 позволяет точно синхронизировать поршни гидроцилиндров, принадлежащих к разным группам.
Пропорциональные распределители 71, 72 и 73 и распределители 74, 75 и 76 обеспечивают очень высокую точность гидравлической синхронизации расстояний, которые проходят поршни 11.4, 12.4 и эквиваленты гидроцилиндров 11, 12, 21, 22, 31 и 32, в дополнение к гидравлической синхронизации, осуществляемой каналами 10.1, 20.1 и 30.1, и к механической синхронизации, обеспечиваемой жесткостью цилиндрического затвора 2.
На фиг. 8 показано устройство 101 согласно второму варианту выполнения изобретения. Представленное выше описание устройства 1 можно транспонировать на описание устройства 101, за исключением существенных различий, которые будут указаны ниже. Элементы устройства 101, идентичные или соответствующие элементам устройства 1, обозначены теми же цифровыми позициями, увеличенными на 100.
Таким образом, можно указать цилиндрический затвор 102, источник 103 гидравлической жидкости, блок 104 управления, три группы 110, 120 и 130 с гидроцилиндрами 111, 112, 121, 131 и 132, при этом каждый гидроцилиндр 111, 112 или эквивалент содержит поршень 111.4, 112.4 или эквивалент, первую камеру 111.1, 112.1 или эквивалент и вторую камеру 111.2, 112.2 или эквивалент.
Устройство 101 отличается от устройства 1, так как все гидроцилиндры 111, 112, 121, 122, 131 и 132 имеют одинаковые размеры, в частности гидроцилиндры 111 и 112 одной группы 110.
Кроме того, устройство 101 отличается от устройства 1, так как оно содержит только один пропорциональный распределитель 171, соединенный с гидроцилиндрами трех групп 110, 120 и 130, вместо трех независимых пропорциональных распределителей 71, 72 и 73. Пропорциональный распределитель 171 управляет потоками рабочей жидкости внутри и за пределами гидроцилиндров 111, 112, 121, 122, 131 и 132 аналогично пропорциональным распределителям 71, 72 и 73.
Устройство 101 отличается от устройства 1, так как содержит делители расхода 110.1, 120.1 и 130.1 вместо каналов 10.1, 20.1 и 30.1. Каждый делитель расхода 110.1, 120.1 или 130.1 выполняет функцию гидравлического органа синхронизации гидроцилиндров, принадлежащих к соответствующей группе 110, 120 или 130.
Делители расхода 110.1, 120.1 и 130.1 соединены с гидроцилиндрами 111, 112, 121, 122, 131 и 132 таким образом, чтобы образовать три разные группы 110, 120 и 130 гидроцилиндров. Каждая группа 110, 120 или 130 объединяет два гидроцилиндра 111-112, 121-122 или 131-132, которые соединены делителем расхода 110.1, 120.1 или 130.1. Два гидроцилиндра, такие как 111-121 или 112-122, принадлежащие к двух разным группам 110, 120, не соединены делителем расхода 110.1, 120.1 или 130.1.
Далее со ссылками на фиг. 8 следует описание конструкции и работы делителя расхода 110.1. Поскольку делители расхода 102.1 и 130.1 идентичны или подобны делителю расхода 110.1, описание делителя расхода 110.1 можно транспонировать на делители расхода 102.1 и 130.1.
Делитель расхода 110.1 содержит два гидравлических мотора 110.2 и 110.3, а также общий вал 110.4. Гидравлический мотор 110.2 соединен с первой камерой 111.1 гидроцилиндра 111. Гидравлический мотор 110.3 соединен с первой камерой 112.1 гидроцилиндра 112.
Общий вал 110.2 механически соединяет гидравлические моторы 110.2 и 110.3 между собой таким образом, что гидравлические моторы 110.2 и 110.3 имеют одинаковую скорость вращения вокруг общего вала 110.4. Таким образом, расход рабочей жидкости в гидравлическом моторе 110.2 равен расходу рабочей жидкости в гидравлическом моторе 110.3. Следовательно, расход рабочей жидкости, проходящей в первую камеру 111.1 или из нее, равен расходу рабочей жидкости, проходящей в первую камеру 111.2 или из нее. Следовательно, гидравлический орган синхронизации, образованный делителем расхода 110.1, синхронизирует расстояния, проходимые поршнями 111.4 и 112.4 в направлении Y.
Альтернативно делителям расхода гидравлические органы синхронизации могут быть образованы делителями количества или объема, например линейными делителями, каждый из которых содержит гидроцилиндр с несколькими камерами, шток которого одновременно приводит в действие несколько поршней.
Согласно непоказанной версии изобретения устройство управления, показанное на фиг. 1, может содержать только один пропорциональный распределитель, который является общим для разных групп, вместо трех пропорциональных распределителей. Согласно другой непоказанной версии, наоборот, вместо одного общего пропорционального распределителя устройство управления, показанное на фиг. 8, может содержать три пропорциональных распределителя из расчета по одному на группу.
Согласно другим непоказанным версиям:
- стороны поршней могут быть не плоскими, а, например, выпуклыми или скошенными;
- цилиндрический затвор может иметь цилиндрическую кольцевую форму с некруглым основанием, например с эллиптическим основанием, или нецилиндрическую кольцевую форму, например призматическую форму с квадратным основанием;
- штоки не закреплены напрямую на цилиндрическом затворе, а связаны с ним через соответствующие органы механического соединения, такие как гайки;
- главное направление перемещения цилиндрического затвора может быть горизонтальным, даже наклонным, а не вертикальным;
- по меньшей мере, одна группа может объединять три гидроцилиндра или более; в варианте, когда группа образована тремя гидроцилиндрами, два канала соединяют эти три гидроцилиндра последовательно; разность между квадратами внутренних диаметров двух последовательных гидроцилиндров равна квадрату диаметра штока гидроцилиндра, имеющего наибольший диаметр;
- две разные группы могут иметь разное число гидроцилиндров;
- можно предусмотреть, по меньшей мере, один гидравлический орган синхронизации для соединения между собой двух гидроцилиндров только в экстренном случае, когда необходимо быстро закрыть цилиндрический затвор; при нормальной эксплуатации эти два гидроцилиндра не соединены этим гидравлическим органом.
Таким образом, устройство в соответствии с настоящим изобретением обеспечивает очень точную синхронизацию между своими гидроцилиндрами за счет их гидравлической синхронизации и их механической синхронизации. Устройство в соответствии с настоящим изобретением легко поддается регулировке и требует лишь простейшего обслуживания. Таким образом, гидравлическая машина в соответствии с изобретением является исключительно надежной.
Реферат
Группа изобретений может быть использована в турбинах, насосах или турбонасосах. Устройство (1) управляет перемещением цилиндрического затвора (2) гидравлической машины между положением открывания и положением перекрывания. Устройство (1) содержит, по меньшей мере, четыре гидроцилиндра (11, 12, 21, 22, 31, 32), штоки (11.3, 12.3) которых выполнены с возможностью соединения с цилиндрическим затвором (2) в местах, расположенных на периметре (с2) цилиндрического затвора (2). Устройство (1) дополнительно содержит, по меньшей мере, два гидравлических органа (10.1, 20.1, 30.1) синхронизации поршней (11.4, 12.4). Органы (10.1, 20.1, 30.1) синхронизации соединены с гидроцилиндрами (11, 12, 21, 22, 31, 32) таким образом, чтобы образовать, по меньшей мере, две разные группы (10, 20, 30). Каждая группа (10, 20, 30) объединяет, по меньшей мере, два гидроцилиндра (11-12, 21-22, 31-32), соединенные, по меньшей мере, одним органом (10.1, 20.1, 30.1) синхронизации, при этом два гидроцилиндра (11, 12, 21, 22, 31, 32), принадлежащие к двум разным группам (10, 20, 30), не соединены органом (10.1, 20.1, 30.1) синхронизации. Изобретения направлены на упрощение регулировок и операций по обслуживанию устройства и создание надежного и простого в регулировке устройства управления. 2 н. и 11 з.п. ф-лы, 8 ил.
Формула
- шток (11.3, 12.3),
- поршень (11.4, 12.4; 111.4, 112.4),
- первую камеру (11.1, 12.1; 111.1, 112.1), и
- вторую камеру (11.2, 12.2; 111.2, 112.2),
при этом первая камера (11.1, 12.1; 111.1, 112.1) и вторая камера (11.2, 12.2; 111.2, 112.2) выполнены с возможностью заполнения рабочей жидкостью, при этом поршень (11.4, 12.4; 111.4, 112.4) связан со штоком (11.3, 12.3) таким образом, чтобы отделять первую камеру (11.1, 12.1; 111.1, 112.1) от второй камеры (11.2, 12.2; 111.2, 112.2), при этом первая камера (11.1, 12.1; 111.1, 112.1) находится со стороны штока (11.3, 12.3) по отношению к поршню (11.4, 12.4; 111.4, 112.4), и вторая камера (11.2, 12.2; 111.2, 112.2) находится со стороны, противоположной штоку (11.3, 12.3), по отношению к поршню (11.4, 12.4; 111.4 112.4), при этом штоки (11.3, 12.3) выполнены с возможностью соединения с цилиндрическим затвором (2; 102) в местах (Р11, Р12, Р21, Р22, Р31, Р32), расположенных на периметре (С2), совпадающем с контуром цилиндрического затвора (2; 102),
при этом устройство (1; 101) отличается тем, что дополнительно содержит, по меньшей мере, два гидравлических органа (10.1, 20.1, 30.1; 101.1, 120.1, 130.1) синхронизации расстояний, проходимых поршнями (11.4, 12.4; 111.4, 112.4) в главном направлении (Y) перемещения цилиндрического затвора (2; 102), при этом гидравлические органы (10.1, 20.1, 30.1; 101.1, 120.1, 130.1) синхронизации соединены с гидроцилиндрами (11, 12, 21, 22, 31, 32; 111, 112, 121, 122, 131, 132) таким образом, чтобы образовать, по меньшей мере, две разные группы (10, 20, 30; 110, 120, 130) гидроцилиндров, при этом каждая группа (10, 20, 30; 110, 120, 130) объединяет, по меньшей мере, два гидроцилиндра (11-12, 21-22, 31-32; 111-112, 121-122, 131-132), соединенные, по меньшей мере, одним гидравлическим органом (10.1, 20.1, 30.1; 101.1, 120.1, 130.1) синхронизации, при этом два гидроцилиндра (11, 12, 21, 22, 31, 32; 111, 112, 121, 122, 131, 132), принадлежащие к двух разным группам (10, 20, 30; 110, 120, 130), не соединены гидравлическим органом (10.1, 20.1, 30.1; 101.1, 120.1, 130.1) синхронизации.
Комментарии