Система управления для привода погружного электродвигателя - RU2702936C2
Код документа: RU2702936C2
Чертежи








Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Настоящая заявка утверждает приоритет предварительной патентной заявки США №62/135327, поданной 19 марта 2015 года, описание которой включено в настоящий документ путем отсылки.
УРОВЕНЬ ТЕХНИКИ
(a) Область техники
[0002] Изобретение относится, по существу, к гидротурбинам.
(b) Предшествующий уровень техники
[0003] Обычными турбинами, используемыми для регулировки расхода воды на гидроэлектростанциях, управляют с помощью масляных гидравлических двигателей, используемых для открытия и закрытия лопаток турбины. Подобные гидравлические системы содержат загрязняющие вещества, в частности, гидравлическое масло, в напорных трубопроводах, насосах и резервуарах, необходимых для поддержания работоспособности системы. Объемы таких загрязняющих веществ значительны и могут достигать 30000 литров на гидроэлектростанции среднего размера.
[0004] Основной недостаток двигателей этого типа заключается в утечке загрязняющих веществ, в частности, гидравлического масла, в воду.
[0005] В штатном режиме эксплуатации утечка масла, превышающая обычный уровень, может быть обусловлена, например, техническим обслуживанием или возрастом системы (некоторые системы находятся в эксплуатации более 75 лет). При утечке масло попадает в окружающую среду, загрязняя речную воду.
[0006] Кроме того, тяжелые отказы системы (вызываемые речным мусором, проходящим через входные фильтры, неравномерным потоком воды или механическим повреждением системы) могут стать причиной возникновения значительного противодавления, приводящего к затоплению турбины в целом и системы управления расходом через турбину, а также попаданию значительного объема масла из гидравлической системы в реку, вследствие чего возникает значительный экологический ущерб.
[0007] Таким образом, сохраняется необходимость в разработке системы производства гидроэлектроэнергии, отличающейся экологичностью и, в то же время, возможностью погружения, и способной заменить существующие системы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0008] Совместно поданная и находящаяся в совместном владении международная патентная заявка РСТ/СА 2015/000253 (включенная в настоящий документ путем отсылки) раскрывает погружную безмасляную систему для производства гидроэлектроэнергии, заменяющую существующие гидравлические приводы, приводящие поршни в действие при помощи электрических приводных механизмов, открывающих и закрывающих рабочее кольцо затвора турбины путем одновременного вращения одного электрического приводного механизма по часовой стрелке, а другого - против часовой стрелки с использованием винтовой резьбы / зубчатой передачи в сборе.
[0009] Тем не менее, при модернизации систем управления на существующих гидроэлектростанциях, оснащенных турбинами с управлением при помощи гидравлических систем, возникает необходимость в управлении электрическими приводными механизмами безмасляной системы посредством существующего управляющего сигнала, передаваемого в гидравлическую систему каждой турбины. Этот управляющий сигнал направляют с центральной системы управления гидроэлектростанции в целях управления каждой турбиной, учитывая требования к нагрузке электрической сети, уровни воды в речном источнике и другие факторы.
[0010] Необходимость адаптации и использования имеющегося управляющего сигнала обусловлена несколькими факторами, включая, помимо прочего:
- Тестирование: при необходимости провести испытания новой погружной безмасляной системы существующую масляную гидравлическую управляющую систему демонтируют в целях замены на вышеописанную безмасляную систему производства гидроэлектроэнергии. Поэтому необходимо обеспечить совместимость новой системы с существующими управляющими сигналами, тем более что такая система, в то же время, управляет производством электроэнергии на основании ответных сигналов нескольких турбин гидроэлектростанции.
- Постоянная потребность в электроэнергии и постоянный поток воды в реке / плотине: следующий фактор, диктующий необходимость в адаптации и использовании существующих систем управления, заключается в невозможности демонтажа всех масляных гидравлических систем управления с гидроэлектростанции вследствие постоянной потребности в электроэнергии и постоянного потока воды в реке / плотине. Поэтому системы управления, относящиеся к каждой турбине, необходимо заменять последовательно, пока прочие турбины гидроэлектростанции работают в обычном режиме.
- Прочие факторы: существует множество прочих факторов, диктующих необходимость использования имеющихся управляющих сигналов, к которым относятся, помимо прочего, расходы на замену всех систем управления производством электроэнергии и центральных систем управления и т.п.
[0011] Согласно первому аспекту изобретения, предложена система управления работой системы электрических приводных механизмов гидроагрегата в гидравлической управляющей среде, причем управляющие сигналы поступают к гидравлическим приводам, а система электрических приводных механизмов содержит первый и второй электрические приводные механизмы, функционально соединенные с рабочим кольцом затвора в противоположных положениях, причем система управления содержит: управляющий интерфейс, выполненный с возможностью приема сигнала гидравлической системы управления и обработки сигнала гидравлической системы управления с целью формирования первого управляющего сигнала, предназначенного для управления перемещением первого электрического приводного механизма, и второго управляющего сигнала, предназначенного для управления перемещением второго электрического приводного механизма, причем первый и второй управляющие сигналы приводят к осевому перемещению первого и второго электрического приводного механизма с одинаковой скоростью, но в противоположных направлениях с целью поворота рабочего кольца затвора в требуемое положение, моделируя тем самым перемещение гидравлических приводов.
[0012] Согласно следующему аспекту изобретения, предложен способ модернизации системы электрических приводных механизмов гидроагрегата в гидравлической управляющей среде, причем система электрических приводных механизмов содержит первый и второй электрические приводные механизмы, функционально соединенные с рабочим кольцом затвора в противоположных положениях, причем способ включает следующие этапы: прием и обработка единого сигнала гидравлической системы управления, предназначенного гидравлическому приводу; формирование на основании полученного сигнала гидравлической системы управления первого управляющего сигнала, предназначенного для управления перемещением первого электрического приводного механизма, и второго управляющего сигнала, предназначенного для управления перемещением второго электрического приводного механизма; осуществление на основании первого и второго управляющего сигнала осевого перемещения первого и второго электрического приводного механизма с одинаковой скоростью, но в противоположных направлениях с целью поворота рабочего кольца затвора в требуемое положение.
[0013] Согласно следующему аспекту, предложена система для модернизации системы электрических приводных механизмов гидроагрегата в гидравлической управляющей среде, содержащая: управляющий интерфейс, выполненный с возможностью приема сигнала гидравлической системы управления, генерируемого для гидравлическим приводам, и обработки сигнала гидравлической системы управления с целью формирования первого управляющего сигнала, предназначенного для управления перемещением первого электрического приводного механизма, и второго управляющего сигнала, предназначенного для управления перемещением второго электрического приводного механизма; первый и второй электрические приводные механизмы функционально соединены в противоположных положениях с рабочим кольцом затвора, соединенным с поворотными направляющими аппаратами турбины. Первый и второй управляющие сигналы приводят к осевому перемещению первого и второго электрического приводного механизма с одинаковой скоростью, но в противоположных направлениях с целью поворота рабочего кольца затвора в требуемое положение, моделируя тем самым точное перемещение гидравлических приводов в ответ на сигнал гидравлической системы управления.
[0014] Признаки и преимущества настоящего изобретения детально раскрываются в нижеследующем описания выбранных вариантов осуществления изобретения, показанных на прилагаемых фигурах. На практике раскрытый и заявленный предмет изобретения может быть модифицирован в различных отношениях в пределах заявленного в формуле объема изобретения. Соответственно, фигуры и описание должны считаться имеющими иллюстративный, а не ограничительный характер; полный объем предмета изобретения изложен в формуле изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0015] Прочие признаки и преимущества настоящего изобретения следуют из нижеследующего подробного описания в сочетании с прилагаемыми фигурами, на которых изображено:
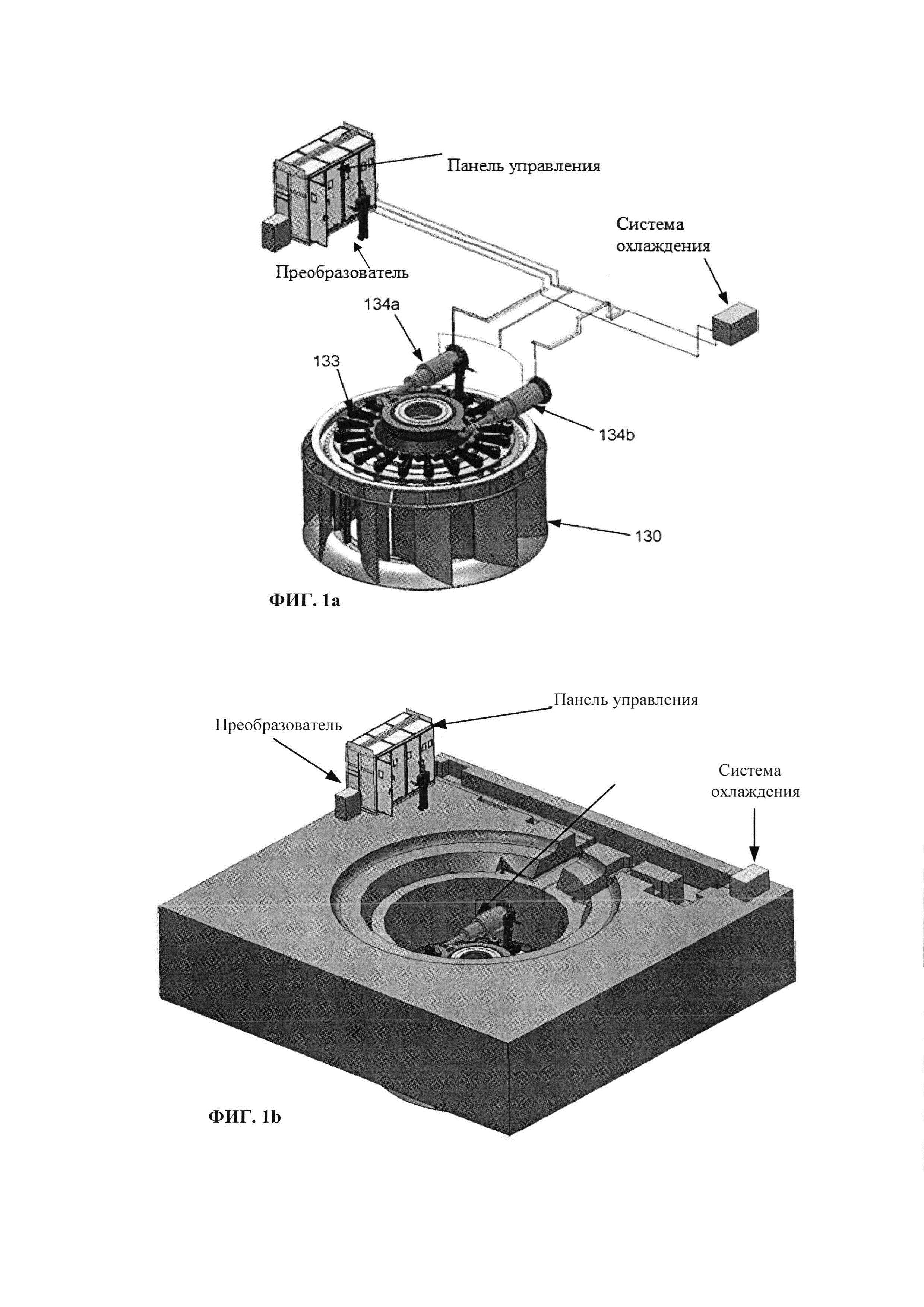
[0016] Фигуры 1а и 1b: трехмерные изображения рабочей среды погружной системы производства гидроэлектроэнергии в соответствии с одним из вариантов осуществления;
[0017] Фигура 2: фотография, на которой изображены приводные механизмы, присоединенные к реальной турбине, в соответствии с одним из вариантов осуществления;
[0018] Фигура 3а: управление турбинами с использованием обычных гидравлических систем;
[0019] Фигура 3b: управление турбинами с использованием электрических приводных механизмов в соответствии с предложенными вариантами осуществления;
[0020] Фигура 4а: пример сигнала управления скоростью, передаваемого на гидравлическую систему управления с целью управления работой данной турбины;
[0021] Фигура 4b: пример сигнала управления скоростью, подаваемого системой управления приводного электродвигателя (EDMCS) на электрические приводные механизмы в ответ на сигнал скорости, показанный на фиг. 4а и адресованный гидравлической системе;
[0022] Фигура 5: примерная блок-схема EDMCS в соответствии с одним из вариантов осуществления;
[0023] Фигура 5а: примерная конфигурация механизма отказа при выходе из строя модуля аналого-цифрового преобразования одного из блоков;
[0024] Фигура 6а: вид EDMCS спереди в аксонометрии в соответствии с одним из вариантов осуществления;
[0025] Фигура 6b: вид сзади EDMCS согласно фигуре 6а; и
[0026] Фигура 7: блок-схема способа модернизации системы электрических приводных механизмов гидроагрегата в гидравлической управляющей среде.
[0027] Следует отметить, что на всех прилагаемых фигурах одинаковые элементы имеют одинаковые ссылочные обозначения.
ПОДРОБНОЕ ОПИСАНИЕ
[0028] Варианты осуществления описывают систему и способ модернизации системы электрических приводных механизмов в системе производства гидроэлектроэнергии, управляемой с помощью гидравлической управляющей среды. Система выполнена с возможностью обслуживания системы производства гидроэлектроэнергии, содержащей электрические приводные механизмы, функционально соединенные с противоположными положениями рабочего кольца затвора в целях поворота направляющих аппаратов в требуемое положение. Система принимает единый управляющий сигнал, адресованный гидравлической системе, содержащей гидравлические приводы. Гидравлические приводы функционально соединены с единым резервуаром для рабочей жидкости и выполнены с возможностью осуществления одновременных и противоположно направленных осевых перемещений. Система выполнена с возможностью обработки единого управляющего сигнала с целью формирования новых управляющих сигналов, каждый из которых адресован другому электрическому приводному механизму и предназначен для приведения электрических приводных механизмов во вращение с одной и той же скоростью, но в противоположных направлениях, моделируя, по существу, точное перемещение гидравлических приводов на рабочем кольце затвора, например, выполняя, по существу, такое же открытие/закрытие направляющих аппаратов. Система выполнена с возможностью изменения сигнала с целью защиты зубчатых передач путем введения демпфирующего эффекта, предназначенного для уменьшения резкого ускорения и замедления, специально используемого в гидравлических системах для преодоления трения и статических эффектов и ускорения реакции. Также описан механизм абсолютной надежности, предназначенный для обеспечения надлежащей работы различных компонентов в штатном режиме эксплуатации и в чрезвычайных ситуациях.
[0029] Как было указано выше, совместно поданная и находящаяся в совместном владении международная патентная заявка РСТ/СА 2015/000253 раскрывает приводной механизм погружного электродвигателя для управления работой турбины на гидроэлектростанции. Приводной механизм электродвигателя заменяет существующие гидравлические приводы с целью предотвращения утечки масла в реку в чрезвычайных рабочих ситуациях. В одном из вариантов осуществления приводной механизм электродвигателя содержит два исполнительных механизма, по одному с каждой стороны рабочего кольца затвора турбины в верхнем и нижнем положениях. Для нормального исполнения своих функций оба исполнительных механизма должны работать синхронно. Примеры приведены ниже со ссылкой на фигуры 1а и 1b.
[0030] Фигуры 1а и 1b: трехмерные изображения рабочей среды погружной системы производства гидроэлектроэнергии в соответствии с одним из вариантов осуществления.
[0031] Как показано на фигурах 1а и 1b, рабочая среда может содержать не погружаемые модули, в частности, трансформаторный модуль, модуль автоматизированного энергоснабжения, модуль панели управления и систему охлаждения. Погружаемая система производства гидроэлектроэнергии содержит погружную турбину 130 и систему 134 управления электрическими приводными механизмами погружной турбины. Как показано на фигуре 1b, турбина 130 может иметь корпусную конструкцию (ниже не погружаемых компонентов и модулей) для управления получением энергии от поступающей воды, протекающей через турбину 130.
[0032] На фигуре 2 представлена фотография, на которой изображены приводные механизмы, присоединенные к реальной турбине. Следует отметить, что диаметр приводного механизма составляет примерно 2-4 фута в пределах диапазона его перемещения, а диаметр турбины - примерно 12 футов. Эти данные приведены исключительно в иллюстративных целях, поскольку размеры турбин и приводных механизмов могут различаться в зависимости от производительности гидроэлектростанции.
[0033] В одном из вариантов осуществления приводными механизмами 134а и 134b управляют с использованием системы управления приводного электродвигателя (EDMCS), которая может быть предусмотрена на панели управления и предназначена для обеспечения надлежащего управления двумя приводными механизмами 134. В одном из вариантов осуществления EDMCS (или управляющий интерфейс) используют в качестве интерфейса между существующим управляющим сигналом, передаваемым центральной управляющей системой 140 станции (рассчитанной на гидравлическую управляющую среду), и электрическими приводными механизмами 134. Приведенный пример ссылается на фигуры 3a и 3b.
[0034] На фигуре 3а показано управление турбинами с использованием обычных гидравлических систем. Как показано на фиг. 3а, центральная управляющая система 140 обменивается данными с каждой турбиной 130-1-130-n гидроэлектростанции для управления открыванием и закрыванием лопаток турбины с целью регулирования расхода воды и, следовательно, скорости и производительности по электроэнергии каждой отдельной турбины. Датчик 133 положения (показанный на фиг. 1) предусмотрен на каждой турбине 130 и предназначен для передачи данных о положении лопаток обратно в центральную управляющую систему 140 (датчик 133 положения обычно находится на рабочем кольце затвора, к которому присоединены лопатки). Центральная управляющая система использует информацию, полученную от датчика 133 положения, для определения скорости и длительности сигнала, передаваемого в гидравлическую систему управления.
[0035] Возвращаясь к фиг. 3а, центральная управляющая система 140 содержит центральный контроллер 142, определяющий общее необходимое количество электроэнергии на основании потребностей энергосистемы, уровень воды и другие вышеупомянутые факторы, и модуль 143 управления скоростью, соединенный с каждой турбиной 130 и выполненный с возможностью определения состояния открывания и закрывания соответствующей турбины 130 станции на основании команд связанного центрального контроллера 142, например, команды на открытие первой турбины 130 на полную мощность и/или открытие второй турбины на 90% мощности при полном закрытии третьей турбины и т.д. Очевидно, что модуль управления скоростью может быть вручную настроен на закрытие данной турбины для технического обслуживания или иной подобной операции. Модуль 144 управления скоростью направляет управляющий сигнал на каждую турбину 130. Управляющий сигнал представляет собой сигнал скорости, определяющий скорость и продолжительность перемещения существующих гидравлических приводов.
[0036] Существующие гидравлические приводы работают подобно поршням, преобразующим давление масла в осевое перемещение с целью открытия/закрытия рабочего кольца 136 затвора, к которому присоединены лопатки (или направляющие аппараты). Например, если полученные с контроллера 142 команды требуют перевода всех турбин 130 гидроэлектростанции на полную мощность, модуль 144 управления скоростью на основании текущего положения каждой турбины определяет скорость, направление перемещения и продолжительность перемещения гидравлического привода для поворота лопаток этой турбины из текущего положения в полностью открытое положение.
[0037] В стандартных турбинах модуль управления скоростью направляет сигнал 4-20 мА на каждую турбину для управления открыванием и закрыванием этой турбины. При 12 мА команда, поданная на гидравлическую систему 146 управления, требует удерживать гидравлические приводы в текущем положении. В диапазоне от 12,1 до 14 мА команды требуют одновременно выдвинуть первый (или верхний) привод и втянуть второй (или нижний) привод для открытия турбины. В диапазоне от 9 до 11,9 мА приводы должны совершить противоположную операцию (первый привод втягивается, второй привод выдвигается, закрывая турбину). Гидравлические системы часто используют клапан генерации импульсов, встраиваемый в гидравлические линии для преодоления статического трения, создаваемого внутри большинства гидравлических сигнальных клапанов в оригинальной системе. В одном из вариантов осуществления используют колебания менее 1 мА для обеспечения импульса, необходимого для преодоления статического трения. Такое колебание необходимо в гидравлических системах, однако оно в значительной мере снижает срок службы шестерней, связанных с электрическими приводными механизмами 134.
[0038] Задача EDMCS заключается в выполнении своих функций в качестве полностью модернизированной системы в существующей общей системе управления станцией, управляющей несколькими турбинами на основании требований к нагрузке электросети, уровней воды в реке и других факторов. Иными словами, основная сложность функционирования EDMCS заключается в том, что поведение гидравлических систем полностью отличается от поведения электрической системы. Поэтому существующие управляющие сигналы, переданные центральной управляющей системой 140 станции и предназначенные для управления гидравлическими системами, не могут использоваться для управления электрическими приводными механизмами 134. Система EDMCS выполнена с возможностью приема существующего управляющего сигнала и его преобразования в целях использования с электрическим приводным механизмом.
[0039] На фигуре 3b показано управление турбинами с использованием электрических приводных механизмов в соответствии с предложенными вариантами осуществления. Рассматривая фигуру 3b, примем, что турбина 130-1 переведена на использование электрических приводных механизмов 134 вместо гидравлических приводов, используемых для управления другими турбинами 130-2 - 130-n. Как показано на фиг. 3b, система EDMCS 148 принимает обычный управляющий сигнал, адресованный гидравлическим приводам, и преобразует его в новый сигнал, предназначенный для управления системой 134 электрических приводных механизмов турбины 130-1. Между центральной управляющей станцией 140 и каждым гидравлическим блоком 146 управления и системой EDMCS 148 может быть предусмотрена аварийная линия 143, обходящая модуль 144 управления скоростью и предназначенная для немедленного закрытия турбины 130 в аварийных ситуациях, например, при отказе модуля 144 управления скоростью или любого из модулей 152 аналого-цифрового преобразования.
Задачи
[0040] Как было сказано выше, основная задача EDMCS заключается в выполнении своих функций в качестве полностью модернизированной системы в существующей общей системе управления станцией, рассчитанной на управление несколькими турбинами при помощи гидравлических систем, поведение которых полностью отличается от поведения электрических систем.
[0041] Одна из основных проблем, не позволяющих использовать существующие управляющие сигналы с электрическими приводными механизмами, заключается в том, что резкое изменение интенсивности этих сигналов приводит к преждевременному выходу из строя зубчатых передач электрических приводных механизмов. В частности, в гидравлических системах имеется тенденция к преодолению повышенного начального поверхностного натяжения, обусловленного масляным уплотнением на поверхности поршня, в то время как крутящий момент электродвигателя достигает максимума при частоте вращения = 0 об/мин (для электродвигателей с постоянными магнитами, в частности, двигателя, используемого в данной конфигурации). Аналогичным образом, естественное амортизирующее действие сжатого масла в гидравлической системе гасит вибрацию приводного механизма при его остановке или начале движения, в то время как электрическая система не имеет такого преимущества. Вследствие допусков резьбы винтов в приводном механизме системы электродвигателя ускорение и замедление привода по команде датчика скорости станции вызывает щелчки и толчки и, следовательно, приводит к преждевременному износу зубчатой передачи, что требует проведения технического обслуживания и неизбежного сокращения интервалов замены резьбы вследствие рывков при запуске и остановке привода. Приведенный пример ссылается на фигуры 4а и 4b.
[0042] На фигуре 4а приведен пример сигнала управления скоростью, передаваемого на гидравлическую систему управления с целью управления работой связанной турбины. Как показано на фиг. 4, в зоне А интенсивность составляет 12 мА для сохранения текущего положения. В зоне В интенсивность увеличивается с 12 мА до 14 мА для открытия турбины, а в зоне С команды требуют сохранения текущего положения. В зоне D команды требуют закрытия турбины, и интенсивность снижается с 12 мА до 9 мА, приводя к быстрому закрытию турбины. Такие быстрые изменения интенсивности приемлемы в гидравлических системах 146. По существу, они необходимы, в частности, для начала движения и преодоления статического трения, для чего могут быть даже еще выше. Тем не менее, максимальный крутящий момент электродвигателей приходится на нулевую частоту вращения, и быстрое изменение интенсивности приведет к возникновению рывков на зубчатых передачах и снижению срока их службы.
[0043] Чтобы управлять электрическими приводными механизмами и одновременно уменьшить эффект рывков на зубчатых передачах, вызванный быстрым изменением интенсивности существующего сигнала управления скоростью, систему EDMCS 148 выполняют с возможностью преобразования сигнала управления скоростью, полученного от модуля 144 управления скоростью, в новый управляющий сигнал, подходящий для электрических приводных механизмов 134, и с возможностью создания амортизирующего эффекта при каждом изменении скорости (и интенсивности), что необходимо электрическим приводным механизмам для предотвращения/уменьшения рывков на зубчатых передачах.
[0044] На фигуре 4b представлен пример сигнала управления скоростью, подаваемого системой EDMCS на электрические приводные механизмы в ответ на сигнал скорости, показанный на фиг. 4а и адресованный гидравлической системе. Как показано на фиг.4b, управляющий сигнал, переданный на электрические приводные механизмы, содержит демпфирующие зоны, постепенно инициирующие перемещение электрических приводных механизмов. Например, переходы между зонами А и В на фиг. 4а носят резкий характер в целях преодоления статического трения в гидравлической системе. В отличие от этого, соответствующая зона на фиг. 4а начинается с низкой интенсивности, которая затем постепенно увеличивается, уменьшая крутящий момент и плавно передавая движение на зубчатые передачи для предотвращения щелчков и рывков, вызываемых, преимущественно, внезапным перемещением при высоком крутящем моменте и допуске зубчатых передач.
[0045] То же самое справедливо для прекращения перемещения между зонами В и С, вследствие чего интенсивность снижается с полной скорости до полной остановки непосредственно в гидравлических системах. Эластичность уплотнений и соединений снижает ударную нагрузку в гидравлических системах. Тем не менее, чтобы остановка не влияла на зубчатые передачи в электрических приводных механизмах, система EDMCS 148 постепенно уменьшает интенсивность сигнала управления скоростью, снижая эффект рывков и щелчков на зубчатых передачах.
[0046] Следующая проблема заключается в том, что система EDMCS имеет дело с тем фактом, что существующие гидравлические системы получают один управляющий сигнал, преобразующийся в гидравлическое давление в гидравлическом резервуаре, что позволяет двум гидравлическим приводам перемещаться одновременно, не нуждаясь в отдельной системе управления для каждого привода. Такие гидравлические приводы работают подобно поршням, преобразующим давление масла в осевое перемещение с целью открытия/закрытия рабочего кольца затвора, к которому присоединены лопатки, причем положительное давление, приложенное к одному поршню, равно отрицательному давлению, приложенному к другому поршню, что приводит к одновременному перемещению гидравлических приводов в противоположных направлениях.
[0047] Этого не происходит в случае электрических приводных механизмов, в частности, описанных в совместно поданной и находящейся в совместном владении международной патентной заявке РСТ/СА 2015/000253. Такие приводные механизмы нуждаются в отдельном управлении для обеспечения правильного перемещения. Кроме того, необходимо реализовать сложный механизм отказа системы, предназначенный для принятия необходимых мер в случае отказа одного или нескольких компонентов в целях для предотвращения вторичного повреждения окружающих механических и электрических компонентов системы производства гидроэлектроэнергии.
[0048] На фигуре 5 изображена примерная блок-схема EDMCS в соответствии с одним из вариантов осуществления, а на фигуре 5а изображена примерная конфигурация механизма отказа при выходе из строя модуля аналого-цифрового преобразования одного из блоков. На фигуре 6а представлен вид EDMCS спереди в аксонометрии в соответствии с одним из вариантов осуществления, а на фигуре 6b - вид сзади EDMCS согласно фигуре 6а.
[0049] Как показано на фиг. 5, система EDMCS содержит два блока 150 управления, а именно первый блок 150а управления, соединенный с первым приводным механизмом 134а (или верхним приводом), и второй блок 150b управления, соединенный со вторым приводным механизмом 134b (или нижним приводом). На оба блока 150а и 150b поступают одинаковые команды, то есть выходные сигналы каждого из этих блоков 150 также одинаковы за исключением реверсирования электрического поля в системе привода одного из приводных механизмов, что необходимо для вращения двигателей в противоположных направлениях. Это важно, поскольку приводные механизмы 134 должны работать с одинаковой скоростью, но в различных направлениях для открывания и закрывания рабочего кольца затвора. Соответственно, во избежание повторов здесь будет описано функционирование лишь одного из этих блоков 150.
[0050] Возвращаясь к фигуре 5, можно увидеть, что каждый блок 150 управления содержит аналого-цифровой преобразователь 152, выполненный с возможностью приема прямоугольного управляющего сигнала, показанного на фиг. 4а и адресованного гидравлическому приводу, и преобразования этого сигнала в цифровой формат. Аналого-цифровой преобразователь 152а преобразует аналоговый сигнал датчика скорости (4-20 мА) в цифровой формат для обработки в модуле 154а управления перемещением. Цифровая версия сигнала принимается модулем 154 управления перемещением. Модуль 154а управления движением представляет собой процессор, который, основываясь на входных данных от датчика скорости станции, определяет необходимость поворота приводного механизма по часовой стрелке или против часовой стрелки и продолжительность вращения для того, чтобы повернуть направляющие аппараты способом, моделирующим работу гидравлических приводов.
[0051] Иными словами, система электрических приводных механизмов должна реагировать на гидравлический управляющий сигнал, по существу, таким же образом, что и система гидравлического привода, чтобы избежать необходимости внесения каких-либо изменений в центральную управляющую станцию. Модуль 154 управления перемещением представляет собой интеллектуальный модуль, управляющий перемещением связанного приводного механизма 134. Модуль 154а управления перемещением выполнен с возможностью обработки полученного сигнала и демпфирования сигнала в соответствии с фиг. 4b в целях уменьшения рывков на зубчатых передачах и искажений передачи сигнала, вызывающих резкое ускорение и/или замедление, повреждающее зубчатые передачи, соединенные с приводными механизмами. Блок 150а управления содержит модуль 156а управления приводом и приводную систему 160а. Модуль 156а управления приводом работает подобно интерфейсу, преобразующему выходной сигнал управления перемещением в сигнал, который может понять система привода. Система 160а привода представляет собой модуль, объединенный с электродвигателем и содержащий встроенный усилитель мощности, дающий ток, достаточный для приведения электродвигателя в действие способом, необходимым для управления 154а перемещением.
[0052] В одном из вариантов осуществления, каждый блок 150 управления может аналогичным образом содержать выделенную систему 155а управления безопасностью, предназначенную для управления всеми защитными отключениями, которые могут происходить в нештатном режиме работы приводных механизмов турбины. При необходимости, система 155 управления безопасностью отключает модуль 154 управления перемещением и передает сигнал безопасности (например, ограничение скорости приводного механизма или автоматическое его отключение в соответствии с требуемым протоколом безопасности) на блок 156 управления приводом (через модуль 154 управления перемещением), который должен отключать сигнал модуля 154 управления перемещением и действовать в соответствии с командами модуля 155 управления безопасностью. Эта система 155 управления безопасностью работает с переключателем 165 подобно системе 164 резервного управления в случае отказа одного из каналов обмена данными между модулями.
[0053] Назначение блока 150b управления полностью аналогично за исключением того факта, что управление приводом и система 150b управления приводом инициирует вращение приводного механизма 134b в направлении, противоположном направлению вращения приводного механизма 134а.
[0054] Как показано на фиг. 5, между двумя блоками 150а и 150b управления предусмотрен переключатель 164. В одном из вариантов осуществления переключатель 164 приводит в действие резервное кольцо, опрашивающее различные модули в блоках управления в целях обеспечения надлежащего функционирования и вмешательства в случаях отказа кольца обмена данными. Например, если модуль 152а аналого-цифрового преобразования прекращает работу, переключатель подаст на модуль 154а управления перемещением выходным сигналом модуля 154b аналого-цифрового преобразования, как показано на фиг. 5а.
[0055] Оператору может быть направлен сигнал тревоги / предупреждение, что позволяет уведомить оператора, не останавливая турбину.
[0056] Тем не менее, в случае любой неисправности блока 156а управления приводом или системы 160а привода переключатель 164 приведет в действие электрический разъединитель на двигателе 134а (не показанный на фигуре), переводя двигатель 134а в режим свободного вращения. В этом случае приводной механизм 134b будет работать в штатном режиме, осуществляя автоматическое механическое закрытие всей турбины (то есть если один двигатель работает, а другой нет, закрытие происходит автоматически). Сигнал тревоги передается на центральную управляющую станцию 140 для информирования оператора о ситуации.
[0057] Первичный блок 170а и 170b аккумуляторов предусмотрен для каждого из блоков 150а и 150b управления и обеспечивает достаточное количество энергии для работы приводных механизмов в аварийных ситуациях. В примере осуществления изобретения, не имеющем ограничительного характера, каждый блок аккумуляторов выполнен с возможностью питания связанного привода в течение выполнения, по меньшей мере, 3 циклов открытия/закрытия в случае отказа электропитания на станции. Вторичный резервный блок 171 аккумуляторов может использоваться в случае отказа одного из первичных блоков аккумуляторов. Системы 172а и 172b управления аккумуляторами можно использовать, согласно одному из вариантов исполнения, для гарантии распознавания любых неисправностей первичных блоков аккумуляторов и подачи энергии в случае отказа электропитания станции с рабочего первичного блока аккумуляторов или вторичного резервного блока аккумуляторов. В одном из вариантов осуществления вторичный резервный блок 171 аккумуляторов может быть выполнен с возможностью включения в свой состав собственной системы 173 управления аккумуляторами, чтобы аналогичным образом гарантировать распознавания любых неисправностей во вторичном резервном блоке аккумуляторов.
[0058] На фигуре 7 изображена блок-схема способа 300 модернизации системы электрических приводных механизмов гидроагрегата в гидравлической управляющей среде. Система электрических приводных механизмов содержит первый и второй электрические приводные механизмы, функционально соединенные в противоположных положениях с рабочим кольцом затвора. Способ начинается на этапе 310 с приема и обработки единого сигнала гидравлической системы управления, адресованного гидравлическому приводу. Этап 320 способа содержит формирование на основании полученного сигнала гидравлической системы управления первого управляющего сигнала для управления перемещением первого электрического приводного механизма и второго управляющего сигнала для управления перемещением второго электрического приводного механизма. На этапе 330 первый и второй управляющие сигналы приводят к осевому перемещению первого и второго электрического приводного механизма с одинаковой скоростью, но в противоположных направлениях с целью поворота рабочего кольца затвора в требуемое положение.
[0059] Хотя предпочтительные варианты осуществления были описаны выше и
представлены на прилагаемых фигурах, специалисту в данной области техники очевидна возможность внесения модификаций в рамках данного описания. Такие модификации считаются возможными вариантами осуществления, входящими в защищаемый объем изобретения.
Реферат
Группа изобретений относится к системе и способу управления работой системы производства гидроэлектроэнергии. Система содержит электрические приводные механизмы, соединенные с противоположными положениями рабочего кольца затвора в целях поворота направляющих аппаратов в требуемое положение. Система получает единый управляющий сигнал, рассчитанный на гидравлическую систему, содержащую гидравлические приводы, соединенные с единым резервуаром для рабочей жидкости и выполненные с возможностью синхронной работы для совершения одновременных осевых перемещений в противоположных направлениях. Система содержит управляющий интерфейс, рассчитанный на формирование новых управляющих сигналов, каждый из которых адресован другому электрическому приводному механизму и предназначен для осевого перемещения электрических приводных механизмов с одной и той же скоростью, но в противоположных направлениях, моделируя, по существу, точное перемещение гидравлических приводов на рабочем кольце затвора. Система выполнена с возможностью введения демпфирующего эффекта, предназначенного для уменьшения резкого ускорения и замедления, используемого в гидравлических системах для преодоления трения и статических эффектов. Группа изобретений направлена на обеспечение экологичности. 3 н. и 17 з.п. ф-лы, 12 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство для управления движением цилиндрического затвора гидравлической машины и гидравлическая машина, содержащая такое устройство
Комментарии