Способ стабилизации скорости вращения гидравлической машины и установка, содержащая гидравлическую машину - RU2715465C2
Код документа: RU2715465C2
Чертежи


Описание
Изобретение относится к способу стабилизации скорости вращения гидравлической машины с S-характеристиками. Типичными гидравлическими машинами с S-характеристиками являются турбонасос, работающий в режиме турбины, или радиально-осевая турбина (турбина Френсиса), предназначенная для работы в условиях высоких полезных нагрузок. Изобретение также относится к установке для преобразования гидравлической энергии в электрическую энергию, в которой этот способ может быть реализован.
Во время запуска турбонасоса в режиме турбины скорость вращения его рабочего колеса должна быть стабилизирована и синхронизирована с частотой энергосистемы, так что машина может быть соединена с энергосистемой. Кроме того, операция соединения обычно выполняется, когда турбонасос находится в рабочей точке без нагрузки, при которой поток воды не прикладывает никакого крутящего момента к рабочему колесу. Эта конкретная рабочая точка является точкой соединения.
При низком расходе воды стабилизация скорости вращения может быть затруднена из-за наличия «S-областей». «S-области» представляют собой неустойчивые области, в которых машина чувствительна к возмущениям. В результате небольшое изменение скорости вращения относительно точки соединения приводит к значительному увеличению крутящего момента, приложенного потоком воды к рабочему колесу, что существенно увеличивает или уменьшает скорость вращения машины. В этих условиях невозможно стабилизировать скорость вращения машины с помощью обычного контура ПИД-регулирования.
Для решения этой проблемы известно, что можно полностью изменить конструкцию гидравлических деталей машины, таких как рабочее колесо или направляющие лопатки. В частности, конструкцию гидравлических деталей машины изменяют, чтобы избежать наличия S-областей в рабочем диапазоне турбонасоса, работающего в режиме турбины. Рабочий диапазон машины соответствует интервалу между низким полным напором и высоким полным напором, воздействию которого может подвергаться машина. Однако это решение очень дорого реализуется и снижает производительность турбонасоса.
Другое решение заключается в оснащении турбонасоса несинхронизированными направляющими лопатками. Это означает, что некоторые направляющие лопатки могут быть ориентированы независимо от других. В результате при запуске машины некоторые направляющие лопатки открываются позже других, что временно изменяет характеристики машины. Это позволяет избежать наличия S-областей во время запуска. Тем не менее, это решение создает нежелательные вибрации, которые влияют на срок службы машины.
Наконец, в заявке на патент США №2004/0115048 была предпринята попытка решить проблему стабилизации скорости вращения в S-областях по-другому. Действительно, эта публикация обеспечивает способ стабилизации скорости вращения турбинного устройства в точке, которая очень близка к S-характеристической части, не рискуя попасть в эту неустойчивую часть. S-характеристическую часть можно определить как участок кривой на Фиг. 1А этой заявки с положительным наклоном, то есть участок ниже кривой NR. Кривая NR - это кривая, при которой никакой крутящий момент не прикладывается потоком воды к турбине. Способ состоит в использовании ПИД-регулятора, воздействующего непосредственно на скорость вращения машины. Этот ПИД-регулятор отличается тем, что его характеристические параметры могут быть изменены в зависимости от скорости вращения машины. Точнее, когда скорость вращения машины увеличивается от 0 до заранее выбранной скорости, коэффициентам пропорционального и интегрального элементов ПИД-регулятора придается высокий коэффициент усиления. Однако когда скорость вращения превышает заранее выбранную скорость, коэффициентам пропорционального и интегрального элементов ПИД-регулятора придается низкий коэффициент усиления.
В описанном примере заранее выбранная скорость установлена на 80% от заданной скорости вращения. В результате, когда рабочая точка машины приближается к точке соединения, скорость сходимости к точке соединения замедляется, чтобы избежать возбуждения системы и входа в неустойчивую S-характеристическую часть. Характеристические параметры ПИД-регулятора выбираются между двумя значениями, используя пару переключателей.
Основным недостатком этого способа является то, что он не позволяет стабилизировать скорость вращения машины, когда точка соединения находится точно в S-характеристической части.
Изобретение предназначено для решения этого недостатка, предлагая способ стабилизации скорости вращения гидравлической машины, которая позволяет стабилизировать скорость вращения в S-характеристической части.
Таким образом, изобретение относится к способу стабилизации скорости вращения гидравлической машины, имеющей S-образную зависимость между скоростью вращения и крутящим моментом. Указанный способ реализуют посредством системы управления с петлей обратной связи, имеющей регулятор для вычисления ориентации, придаваемой направляющим лопаткам машины, при этом способ включает этапы, которые на каждой итерации содержат:
а) вычисление набора внутренних состояний, связанного с рабочей точкой машины,
б) в соответствии с набором внутренних состояний, вычисленным на этапе а), установление линеаризованной передаточной функции, представляющей собой скорость вращения машины в зависимости от ориентации направляющих лопаток,
в) вычисление характеристических параметров регулятора в зависимости от характеристических параметров линеаризованной передаточной функции, установленной на этапе б), при которых система управления с петлей обратной связи является устойчивой,
г) измерение скорости вращения гидравлической машины,
д) сравнение измеренной скорости вращения с заданной скоростью вращения, и
е) регулирование с помощью регулятора ориентации, придаваемой направляющим лопаткам, для уменьшения разности между измеренной скоростью вращения и заданной скоростью вращения.
Благодаря изобретению, характеристические параметры регулятора изменяют на каждой итерации для обеспечения устойчивости системы управления с петлей обратной связи. Эта система управления с петлей обратной связи не чувствительна к тому, что точка соединения находится или не находится в S-характеристической части. Следовательно, машина может быть синхронизирована с энергосистемой даже тогда, когда точка соединения расположена в S-характеристической части.
Согласно одному предпочтительному аспекту способа набор внутренних состояний, связанный с рабочей точкой, включает параметр, зависящий от скорости вращения машины, параметр, зависящий от крутящего момента, прикладываемого потоком воды к рабочему колесу машины, параметр, зависящий от скорости потока воды, протекающей через гидравлическую машину, полный напор, действию которого подвергается гидравлическая машина, расход воды, проходящей через машину, и частные производные, являющиеся неотъемлемой частью квадруплета значений рабочей точки.
Согласно одному предпочтительному аспекту способа на этапе в) характеристические параметры регулятора вычисляют в соответствии с методом компенсации полюсов и/или методом размещения полюсов.
Согласно одному предпочтительному аспекту способа регулятор является пропорциональным интегративным дифференцирующим регулятором.
Согласно одному предпочтительному аспекту способа гидравлическая машина представляет собой турбину с двойным регулированием, содержащую ступицу, оснащенную подвижными лопатками, при этом на этапе г) также регулируют ориентацию, придаваемую подвижным лопаткам, для уменьшения разности между измеренной скоростью вращения машины и заданной скоростью вращения.
Согласно одному предпочтительному аспекту способа линеаризованную передаточную функцию и регулятор моделируют в представлении Лапласа.
Изобретение также относится к установке для преобразования гидравлической энергии в электрическую энергию, содержащей гидравлическую машину с регулируемыми направляющими лопатками. Указанная установка также содержит:
- систему управления с петлей обратной связи, содержащую регулятор для вычисления ориентации, придаваемой направляющим лопаткам,
- средство вычисления набора внутренних состояний, связанных с рабочей точкой машины,
- средство установления, в соответствии с набором расчетных внутренних состояний, линеаризованной передаточной функции, представляющей собой скорость вращения машины в зависимости от ориентации направляющих лопаток,
- средство вычисления характеристических параметров регулятора в зависимости от характеристических параметров установленной линеаризованной передаточной функции, чтобы система управления с петлей обратной связи была устойчивой,
- средство измерения скорости вращения гидравлической машины,
- средство сравнения измеренной скорости вращения с заданной скоростью вращения, и
- регулятор для регулирования ориентации, придаваемой направляющим лопаткам, чтобы уменьшить разность между измеренной скоростью вращения и заданной скоростью вращения.
Согласно одному предпочтительному аспекту установки гидравлическая машина представляет собой турбонасос, имеющий S-образную зависимость между скоростью вращения и крутящим моментом и работающий в режиме турбины.
Согласно одному предпочтительному аспекту установки гидравлическая машина представляет собой турбину Френсиса, предназначенную для условий высокого полного напора.
Согласно одному предпочтительному аспекту установки гидравлическая машина представляет собой турбину с двойным регулированием, содержащую ступицу, оснащенную подвижными лопатками, при этом установка дополнительно содержит средство регулирования ориентации, придаваемой подвижным лопаткам, для уменьшения разности между измеренной скоростью вращения машины и заданной скоростью вращения.
Изобретение ниже объяснено в соответствии с чертежами и в качестве иллюстративного примера без ограничения объекта изобретения. На чертежах:
Фиг. 1 изображает схематический разрез установки для преобразования гидравлической энергии в электрическую энергию и, соответственно, в соответствии с изобретением содержащей турбонасос,
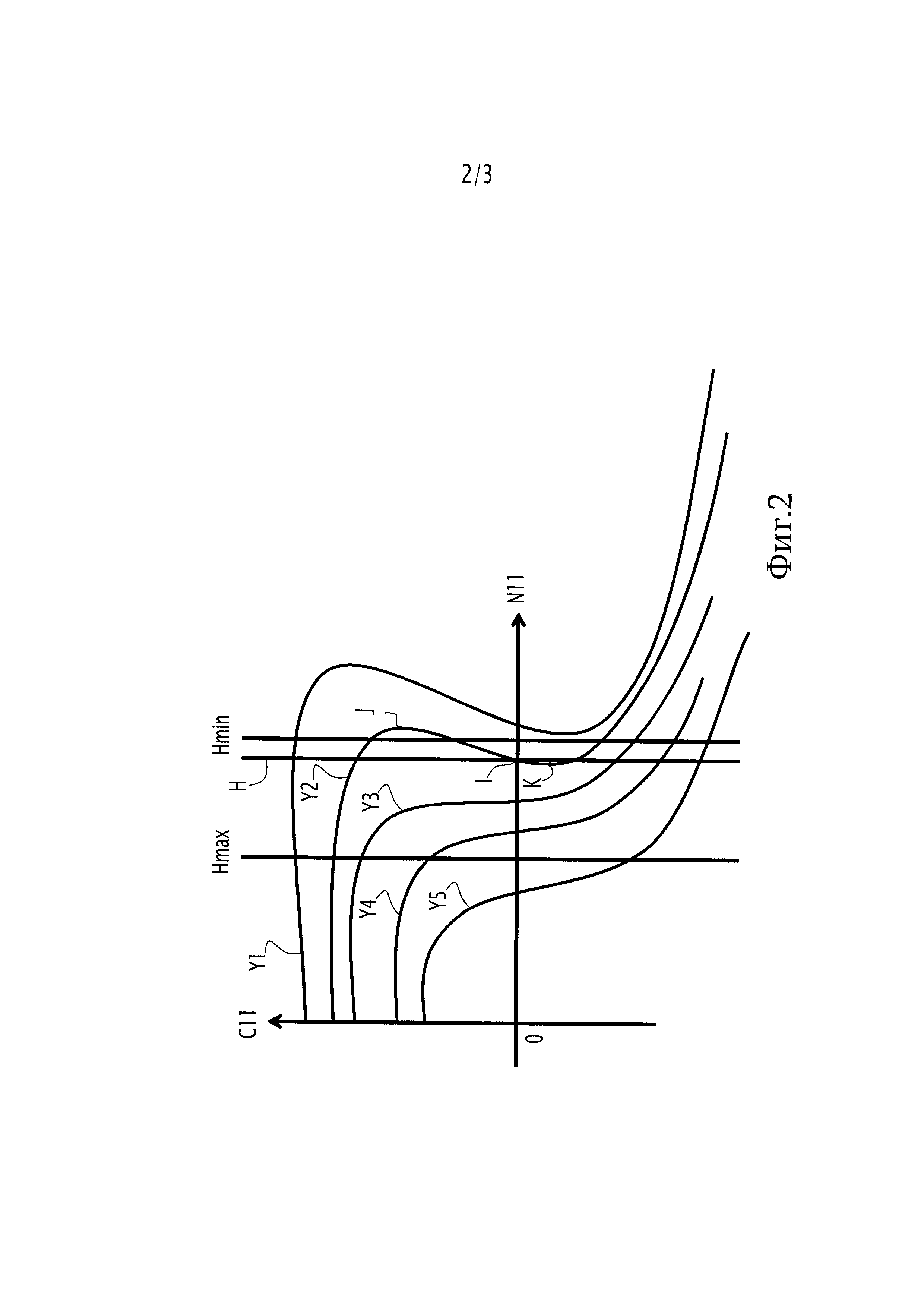
Фиг. 2 изображает график, представляющий характеристики турбонасоса установки, показанной на Фиг. 1, работающего в режиме турбины, и
Фиг. 3 изображает схему управления, иллюстрирующую предложенный способ, который направлен на стабилизацию скорости вращения турбонасоса, принадлежащего установке, изображенной на Фиг. 1.
На Фиг. 1 показана установка 2 для преобразования гидравлической энергии в электрическую энергию. Установка 2 содержит гидравлическую машину. В этом примере эта гидравлическая машина представляет собой турбонасос 20, который в режиме турбины использует гидравлическую энергию для приведения вала 201 во вращении вокруг оси Z201. Вал 201 соединен с непоказанным генератором для производства электричества.
Далее ниже, если явным образом не указано иное, турбонасос 20 работает в режиме турбины. Турбонасос 20 содержит спиральную камеру 200, которая опирается на бетонные блоки 22 и 24. Непоказанная заливная арматура проходит между непоказанным расположенным выше по потоку резервуаром и спиральной камерой 200. Эта заливная арматура создает принудительный поток F для подачи воды в машину 20. Машина 20 содержит рабочее колесо 202, которое окружено спиральной камерой 200 и которое содержит лопатки 208, между которыми в рабочих условиях протекает вода. В результате рабочее колесо 202 вращается вокруг оси Z202, которая совмещена с осью Z201 вращения вала 201. Рабочее колесо 202 прикреплено к валу 201.
Вокруг рабочего колеса 202 расположен направляющий аппарат. Он содержит подвижные направляющие лопатки 206, которые равномерно распределены вокруг рабочего колеса 202. Выше по потоку от направляющего аппарата и вокруг него расположен предварительный направляющий аппарат. Предварительный направляющий аппарат образован статорными лопатками 204, равномерно распределенными вокруг оси Z202 вращения колеса 202.
Ниже рабочего колеса 202 расположена всасывающая труба 26, которая предназначена для отвода воды ниже по потоку от машины 20.
Все направляющие лопатки 206 направляющего аппарата имеют регулируемый шаг вокруг оси Z206, параллельной оси Z202 вращения рабочего колеса 202. Следовательно, эти лопатки могут поворачиваться для регулирования расхода воды, поступающей в машину 20. Все направляющие лопатки 206 ориентированы с одинаковым углом относительно закрытого положения. Другими словами, они синхронизированы.
График изолиний характеристик гидравлической машины представляет собой набор рабочих точек, каждый из которых определяется квадруплетом значений N11, С11, Q11, Y, где Y представляет собой ориентацию направляющих лопаток 206, N11 представляет собой параметр, зависящий от скорости вращения машины, С11 представляет собой параметр, зависящий от крутящего момента, прикладываемого потоком F воды к рабочему колесу машины, a Q11 представляет собой параметр, зависящий от скорости потока воды, протекающей через гидравлическую машину. При заранее выбранной ориентации Y направляющих лопаток из графика изолиний может быть извлечена кривая «изо-открытия».
В качестве иллюстративного примера, на Фиг. 2 представлены пять кривых изо-открытия, каждая из которых соответствует разной ориентации Y1, Y2, Y3, Y4 и Y5 направляющих лопаток. Эти кривые изо-открытия нанесены на график, имеющий в качестве оси абсцисс ось N11, а в качестве оси ординат ось С11. Верхний правый квадрант этого графика, то есть квадрант, в котором как N11, так и С11 являются положительными, соответствует режиму турбины. В режиме турбины рабочий диапазон турбонасоса 20 соответствует интервалу между низким полным напором, Hmin, и высоким полным напором, Нmax, воздействию которых может подвергаться машина. При заранее выбранном полном напоре Н точка I соединения машины 20 известна. Эта точка I соединения соответствует точке, в которой турбонасос 20 может быть соединен с энергосистемой в режиме турбины. Это рабочая точка без нагрузки, при которой на рабочее колесо 202 не действует крутящий момент и при которой скорость вращения машины синхронизируется с частотой энергосистемы. В выбранном примере эта точка I соединения расположена на кривой изо-открытия, связанной с открытием Y2 направляющих лопаток. Как показано на Фиг. 2, гидравлическая машина 20 имеет S-характеристики при низком расходе воды. Точнее, кривые изо-открытия, соответствующие открытиям Y1 и Y2 направляющих лопаток, позволяющие достичь точки соединения машины при низком расходе воды, содержат S-характеристическую часть.
В настоящем документе S-характеристическая часть кривой изо-открытия соответствует участку кривой, имеющему положительный наклон. Другими словами, это кривая, для которой увеличение параметра N11 влечет за собой увеличение параметра С11. Для ясности объяснения, взяв в качестве примера кривую изо-открытия, связанную с открытием Y2 направляющих лопаток, S-характеристическая часть ограничена между точками K и J.
S-характеристическая часть считается неустойчивой. Это означает, что гидравлическая машина 20 чувствительна к возмущениям в этой конкретной части. В результате небольшое изменение скорости вращения машины относительно точки I соединения влечет за собой значительное увеличение приложенного крутящего момента, когда поток F воды падает на рабочее колесо 202 турбонасоса 20, что существенно увеличивает или уменьшает скорость вращения машины. После этого стабилизация скорости вращения машины может быть затруднена.
Далее со ссылкой на Фиг. 3 объясняется способ автоматической стабилизации скорости вращения гидравлической машины с S-характеристиками. В частности, способ подходит для стабилизации скорости вращения машины, когда точка соединения расположена в S-характеристической части, такая как точка I.
Как показано на Фиг. 3, этот способ реализуется посредством системы 1 управления с петлей обратной связи, имеющей регулятор C(s), который в данном примере представляет собой пропорциональный интегративный дифференцирующий регулятор. Регулятор C(s) в качестве входного сигнала принимает разность ΔN между скоростью N вращения гидравлической машины и заданной скоростью NC вращения. Затем регулятор C(s) выводит ориентацию Yi, которую требуется придать направляющим лопаткам 206. В представлении Лапласа передаточная функция регулятора приведена ниже:

где Kр, Ti и Td являются параметрами регулирования регулятора.
Система 1 управления с петлей обратной связи воздействует непосредственно на поведение реальной машины, которая на Фиг. 3 представлена блоком RealΣ. Блок RealΣ соответствует реальной передаточной функции гидравлической машины 20.
Способ является итеративным. Он заключается в том, чтобы последовательно создавать параметры регулирования C(s) для стабилизации скорости вращения при заданной скорости вращения. Заданная скорость NC вращения соответствует скорости синхронизации с энергосистемой. В начале способа направляющие лопатки 206 ориентированы с номинальной ориентацией.
Первый этап способа состоит в вычислении набора внутренних состояний, связанных с рабочей точкой машины 20. Этот набор внутренних состояний содержит координаты N11, Q11, C11 рабочей точки, полный напор Н, подаваемый в гидравлическую машину 20, расход Q воды, проходящей через машину 20, и некоторые частные производные, связанные с координатами рабочей точки машины. Эти частные производные являются неотъемлемой частью квадруплета значений рабочей точки.
Набор внутренних состояний, связанных с рабочей точкой, может быть рассчитан на основе знаний графика изолиний характеристик и непосредственных измерений. Калькулятор 102, встроенный в систему 1, позволяет выполнять эту задачу.
Передаточная функция Σreal очень нелинейная и не может быть непосредственно использована для стабилизации скорости вращения машины.
Второй этап способа заключается в создании линеаризованной передаточной функции Σlin(s), которая может быть использована в процессе расчета, ведущем к стабилизации скорости N вращения машины. Она представляет собой скорость вращения машины в зависимости от ориентации, приданной направляющим лопаткам. Эта передаточная функция Σlin(s) может рассматриваться как ближайшая к реальности линеаризованная модель. В представлении Лапласа передаточная функция Σlin(s) может быть задана следующим уравнением:

где А0, А1, В0, B1 и В2 представляют собой характеристические параметры, которые зависят от рабочей точки машины, a s представляет собой переменную Лапласа. В этом примере используется передаточная функция второго порядка. Для более точной модели может использоваться более высокий порядок.
Характеристические параметры А0, А1, В0, В1 и В2 линеаризованной передаточной функции Σlin(s) вычисляют в зависимости от множества внутренних состояний, вычисленных на первом этапе, так что передаточная функция Σlin(s) является настолько реалистичной, насколько это возможно. Эту операцию выполняют в калькуляторе 103. Иными словами, характеристические параметры линеаризованной передаточной функции вычисляют так, что скорость вращения, рассчитанная в соответствии с этой линеаризованной функцией, приблизительно такая же, как и реальная скорость вращения при заранее выбранной ориентации направляющих лопаток.
Третий этап способа состоит в том, чтобы вычислить параметры Kр, Ti и Td регулирования регулятора, чтобы система 1 управления с петлей обратной связи была устойчивой. Для этой цели калькулятор 100, предназначенный для выполнения этой задачи, интегрирован в систему 1 управления, а реальную передаточную функцию RealΣ аппроксимируют линеаризованной передаточной функцией Σlin(s). Параметры регулирования рассчитывают таким образом, что приближенная передаточная функция

Напомним, что полюсы выражения являются значениями переменной Лапласа «s», для которых знаменатель выражения равен нулю.
Для обеспечения устойчивости F(s) существует множество способов. Например, здесь представлен метод компенсации полюсов. Также может быть использован способ размещения полюсов. Полюсы знаменателя передаточной функции Σlin(s) считаются неустойчивыми. Затем числитель регулятора C(s) корректируют, чтобы компенсировать или подавить это неустойчивое поведение. Точнее, числитель регулятора C(s) выбирают таким, чтобы он имел те же самые полюсы, что и знаменатель передаточной функции Σlin(s). Это называется компенсацией полюсов и приводит к следующему уравнению:

Рассматривая два вышеуказанных уравнения, передаточная функция F(s) системы 1 управления с петлей обратной связи может быть выражена следующим образом:

Чтобы обеспечить устойчивость системы 1 управления с петлей обратной связи, полюсы знаменателя аппроксимируемой передаточной функции F(s) должны иметь отрицательную вещественную часть. Для достижения этой цели можно использовать метод размещения полюсов. Этот метод размещения полюсов заключается в корректировке параметров выражения для получения одного или нескольких желаемых полюсов. В данном случае может быть выбран полюс, который равен


где

Третий характеристический параметр Kр регулятора может быть затем извлечен на основе приведенного выше уравнения, как показано ниже:

Четвертым этапом способа является измерение скорости N вращения машины.
Следующий этап состоит в сравнении измеренной скорости N вращения с заданной скоростью NC вращения, которая соответствует скорости синхронизации с энергосистемой.
Последний этап заключается в автоматическом регулировании регулятором ориентации, придаваемой направляющим лопаткам 206, чтобы уменьшить разность ΔN между измеренной скоростью N вращения и заданной скоростью NC вращения. Для этой цели регулятор выводит значение заданного открытия Yi+1 для придания его направляющим лопаткам 206. Это заданное открытие Yi+1 используется в качестве команды для направляющих лопаток 206 реальной системы, представленной линеаризованной передаточной функцией Σlin(s).
Действительно, как упоминалось выше, способ является итеративным, что означает, что описанные выше этапы повторяют, когда система находится в пусковом режиме.
В результате характеристические параметры линеаризованной передаточной функции Σlin(s) вычисляют на каждой итерации способа, чтобы максимально соответствовать реальности. Соответственно, параметры Kр, Ti и Td регулирования регулятора вычисляются при каждом приращении, то есть на каждой итерации способа, чтобы получить устойчивую систему управления с петлей обратной связи.
В непредставленном альтернативном варианте выполнения изобретения аналогичный способ может быть реализован для стабилизации скорости вращения турбины с двойным регулированием, такой как поворотно-лопастная турбина или капсульная турбина. Турбина с двойным регулированием содержит ступицу, оснащенную подвижными лопатками. Скорость потока воды, циркулирующей вокруг ступицы, также регулируется благодаря ряду направляющих лопаток. В этом случае подвижные лопатки также ориентированы так, чтобы уменьшить разность ΔN между скоростью N вращения, рассчитанной на основе передаточной функции Σlin(s), и заданной скоростью NC вращения.
В непредставленном альтернативном варианте выполнения изобретения аналогичный способ может быть реализован для стабилизации скорости вращения радиально-осевой турбины (турбины Френсиса), предназначенной для условий высокого полного напора.
В другом, непредставленном альтернативном варианте выполнения изобретения может использоваться другой тип регулятора, чем PID-регулятор. Например, регулятор C(s) может быть компенсатором с запаздыванием или регулятором с двойной производной. Технические характеристики различных вариантов выполнения и альтернативных вариантов выполнения изобретения, описанных выше, могут быть объединены вместе для генерации новых вариантов выполнения изобретения.
Реферат
Группа изобретений относится к способу стабилизации скорости (N) вращения гидравлической машины, имеющей S-образную зависимость между скоростью вращения и крутящим моментом, и установке для преобразования гидравлической энергии в электрическую. Способ реализуют посредством системы управления с петлей обратной связи, имеющей регулятор (C(s)) для вычисления ориентации (Y), придаваемой направляющим лопаткам. Способ включает этапы, которые на каждой итерации содержат: вычисление набора внутренних состояний, связанного с рабочей точкой машины, в соответствии с набором внутренних состояний, установление линеаризованной передаточной функции, представляющей собой скорость вращения машины в зависимости от ориентации направляющих лопаток, вычисление характеристических параметров регулятора в зависимости от характеристических параметров линеаризованной передаточной функции, при которых система управления является устойчивой, измерение скорости (N), сравнение измеренной скорости (N) с заданной скоростью (N) и регулирование с помощью регулятора (C(s)) для уменьшения разности (ΔN) между (N) и (N). Группа изобретений направлена на стабилизацию и синхронизацию скорости вращения при запуске с частотой энергосистемы для возможности соединения с ней. 2 н. и 8 з.п. ф-лы, 3 ил.
Комментарии