Система управления работой транспортного средства - RU147835U1
Код документа: RU147835U1
Чертежи



Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ПОЛЕЗНАЯ МОДЕЛЬ
Настоящая полезная модель относится к системе улучшенного управления работой транспортного средства. Способ может быть особенно полезным для транспортных средств, которые включают в себя двигатели, которые часто автоматически останавливаются, а затем повторно запускаются.
УРОВЕНЬ ТЕХНИКИ
Двигатель транспортного средства может автоматически останавливаться во время выбранных условий для сбережения топлива. Двигатель может перезапускаться в других условиях, когда требуется приводить транспортное средство в движение. Некоторые транспортные средства, которые автоматически останавливаются, могут включать в себя автоматическую трансмиссию. Трансмиссия может находиться на выбранной передаче в момент времени, когда останавливается двигатель (см. например US 8192328, опубл. 05.06.2012, МПК B60W 10/02, B60W 10/04). Если транспортное средство остановлено на уклоне вниз по склону, и двигатель автоматически перезапускается, в то время как передача включена, зазор привода на ведущие колеса транспортного средства сначала может возрастать вследствие увеличения расстояния от зуба до зуба шестерен или потери натяжения цепного привода, обусловленного отрицательным уклоном. Увеличенный зазор может резко убираться, и ударная нагрузка зуба на зуб или звеньев цепи может возникать после того, как перезапускается двигатель. Ударная нагрузка между зубьями шестерен или внутри цепного привода может давать нежелательный слышимый звук, а также ухудшение характеристик зуба шестерни или цепного привода.
СУЩНОСТЬ ПОЛЕЗНОЙ МОДЕЛИ
Авторы в материалах настоящего описания выявили вышеуказанные недостатки и предложили систему управления работой транспортного средства, содержащую двигатель;
тормозную педаль;
тормоза транспортного средства;
тормозную педаль транспортного средства;
трансмиссию; и
контроллер, включающий в себя исполняемые команды, хранимые в постоянной памяти, для отпускания тормозов транспортного средства в ответ на состояние двигателя.
В одном из вариантов предложена система, в которой состоянием двигателя является скорость вращения двигателя, при этом тормоза транспортного средства отпускаются после отпускания тормозной педали транспортного средства.
В одном из вариантов предложена система, в которой скорость вращения двигателя является скоростью вращения, на которой гидротрансформатор трансмиссии передает большую, чем пороговая, величину крутящего момента двигателя.
В одном из вариантов предложена система, дополнительно содержащая дополнительные команды для регулировки величины крутящего момента двигателя в ответ на уклон дороги.
В одном из вариантов предложена система, в которой состоянием двигателя является скорость вращения двигателя, при этом система дополнительно содержит дополнительные команды для регулировки скорости вращения двигателя, на которой отпускаются тормоза транспортного средства, на основании уклона дороги.
В одном из вариантов предложена система, в которой скорость вращения двигателя, на которой отпускаются тормоза транспортного средства, повышается для увеличения положительного уклона дороги.
Кроме того, предложен способ запуска двигателя, включающий в себя: автоматический запуск двигателя; и удержание тормоза транспортного средства в ответ на уклон дороги после того, как тормозная педаль транспортного средства, которая приводит в действие тормоза транспортного средства, отпущена.
Посредством удержания тормозов транспортного средства в нажатом состоянии в ответ на уклон дороги, может быть возможным уменьшать вероятность ударных нагрузок между зубьями шестерен или внутри цепных приводов, когда двигатель перезапускается, и положительный крутящий момент прикладывается к приводу на ведущие колеса. Например, если уклон дороги является нулевым. Тормоза транспортного средства могут отпускаться, когда водитель отпускает тормозную педаль. С другой стороны, если уклон дороги является ненулевым и отрицательным, тормоза транспортного средства могут отпускаться после того, как скорость вращения двигателя достигает пороговой скорости вращения, где гидротрансформатор передает положительный крутящий момент на привод на ведущие колеса. Удержание тормозов транспортного средства в нажатом состоянии ограничивает вероятность увеличения зазора шестерен или уменьшения натяжения цепи в приводе на ведущие колеса.
Настоящее описание может давать несколько преимуществ. В частности, подход может ослаблять слышимые шумы привода на ведущие колеса. Дополнительно подход может уменьшать ухудшение работы привода на ведущие колеса. Кроме того, подход может улучшать качество вождения транспортного средства.
Вышеприведенные преимущества и другие преимущества и признаки настоящего описания будут без труда очевидны из последующего подробного описания, когда воспринимаются по отдельности или в связи с прилагаемыми чертежами.
Следует понимать, что сущность полезной модели, приведенная выше, представлена для ознакомления с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании. Не предполагается идентифицировать ключевые или существенные признаки заявленного предмета полезной модели, объем которой однозначно определен формулой полезной модели, которая сопровождает подробное описание. Более того, заявленный предмет полезной модели не ограничен вариантами осуществления, которые исключают какие-либо недостатки, отмеченные выше или в любой части этого описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Преимущества, описанные в материалах настоящего описания, будут полнее понятны по прочтении примера варианта осуществления, указанного в материалах настоящего описания, как описание предпочтительных вариантов осуществления полезной модели, когда воспринимаются по отдельности или со ссылкой на чертежи, где:
фиг. 1 - схематичное изображение двигателя;
фиг. 2 показывает примерную компоновку системы двигателя;
фиг. 3 показывает интересующие сигналы во время работы транспортного средства;
фиг. 4 - блок-схема последовательности операций примерного способа управления транспортным средством.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ПОЛЕЗНОЙ МОДЕЛИ
Настоящее описание относится к управлению работой транспортного средства. В одном из неограничивающих примеров транспортное средство может включать в себя двигатель, как проиллюстрировано на фиг. 1. Кроме того, двигатель может быть частью транспортного средства, как проиллюстрировано на фиг. 2. Транспортное средство может работать согласно способу по фиг. 4 и как показано на фиг. 3.
Со ссылкой на фиг. 1 двигатель 10 внутреннего сгорания, содержащий множество цилиндров, один цилиндр которого показан на фиг. 1, управляется электронным контроллером 12 двигателя. Двигатель 10 включает в себя камеру 30 сгорания и стенки 32 цилиндра с поршнем 36, расположенным в них и присоединенным к коленчатому валу 40. Камера 30 сгорания показана сообщающейся с впускным коллектором 44 и выпускным коллектором 48 через соответствующий впускной клапан 52 и выпускной клапан 54. Каждый впускной клапан и выпускной клапан может приводиться в действие кулачком 51 впускного клапана и кулачком 53 выпускного клапана. Положение кулачка 51 впускного клапана может определяться датчиком 55 кулачка впускного клапана. Положение кулачка 53 выпускного клапана может определяться датчиком 57 кулачка выпускного клапана.
Топливная форсунка 66 показана расположенной для впрыска топлива непосредственно в цилиндр 30, что известно специалистам в данной области техники как непосредственный впрыск. В качестве альтернативы топливо может впрыскиваться во впускное окно, что известно специалистам в данной области техники как оконный впрыск. Топливная форсунка 66 выдает жидкое топливо пропорционально длительности импульса сигнала FPW из контроллера 12. Топливо подается в топливную форсунку 66 топливной системой (не показана), включающей в себя топливный бак, топливный насос и направляющую-распределитель для топлива (не показана). Топливная форсунка 66 питается рабочим током из формирователя 68, который реагирует на действие контроллера 12. В дополнение впускной коллектор 44 показан сообщающимся с возможным электронным дросселем 62, который регулирует положение дроссельной заслонки 64 для регулирования потока воздуха из воздухозаборника 42 во впускной коллектор 44. В одном из примеров может использоваться система непосредственного впрыска низкого давления, где давление топлива может подниматься до приблизительно 20-30 бар. В качестве альтернативы двухкаскадная топливная система высокого давления может использоваться для формирования более высоких давлений топлива.
Система 88 зажигания без распределителя выдает искру зажигания в камеру 30 сгорания через свечу 92 зажигания в ответ на действие контроллера 12. Универсальный датчик 126 кислорода выхлопных газов (UEGO) показан присоединенным к выпускному коллектору 48 выше по потоку от каталитического нейтрализатора 70 выхлопных газов. В качестве альтернативы двухрежимный датчик кислорода выхлопных газов может использоваться вместо датчика 126 UEGO.
Нейтрализатор 70 выхлопных газов в одном из примеров включает в себя многочисленные брикеты катализатора. В еще одном примере, могут использоваться многочисленные устройства снижения токсичности выхлопных газов, каждое с многочисленными брикетами. Нейтрализатор 70 выхлопных газов в одном из примеров может быть катализатором трехкомпонентного типа.
Тормоза 147 транспортного средства могут снабжаться сжатым маслом в тормозной магистрали 149 из главного цилиндра 145. Усилитель 140 тормозов содействует ступне 152 водителя, нажимающей тормозную педаль 150, приводить в действие тормоза 147. Разрежение в усилителе 140 тормозов может считываться датчиком 142 разрежения. Запорный клапан 143 предоставляет воздуху возможность течь из усилителя 140 тормозов во впускной коллектор 44. Запорный клапан 143 ограничивает поток воздуха из впускного коллектора 44 в усилитель 140 тормозов.
Контроллер 12 показан на фиг. 1 в качестве традиционного микрокомпьютера, включающего в себя: микропроцессорный блок 102, порты 104 ввода/вывода, постоянное запоминающее устройство 106, оперативное запоминающее устройство 108, энергонезависимую память 110 и традиционную шину данных. Контроллер 12 показан принимающим различные сигналы с датчиков, присоединенных к двигателю 10, в дополнение к тем сигналам, которые обсуждены ранее, в том числе: температуру хладагента двигателя (ECT) с датчика 112 температуры, присоединенного к патрубку 114 охлаждения; датчика 134 положения, присоединенного к педали 130 акселератора для считывания силы, приложенной ступней 132; измерение давления во впускном коллекторе двигателя (MAP) с датчика 122 давления, присоединенного к впускному коллектору 44; датчика положения двигателя с датчика 118 на эффекте Холла, считывающего положение коленчатого вала 40; измерение массы воздуха, поступающего в двигатель, с датчика 120, и измерение положения дросселя с датчика 58. Барометрическое давление также может считываться (датчик не показан) для обработки контроллером 12. В предпочтительном аспекте настоящего описания датчик 118 положения двигателя вырабатывает заданное количество равномерно разнесенных импульсов каждый оборот коленчатого вала, по которому может определяться скорость вращения двигателя (RPM, в оборотах в минуту).
В некоторых примерах двигатель может быть присоединен к системе электродвигателя/аккумуляторной батареи в транспортном средстве с гибридным приводом. Транспортное средство с гибридным приводом может иметь параллельную конфигурацию, последовательную конфигурацию, либо их варианты или комбинации. Кроме того, в некоторых вариантах осуществления могут применяться другие конфигурации двигателя, например, дизельный двигатель.
При работе каждый цилиндр в двигателе 10 типично подвергается четырехтактному циклу: цикл включает в себя такт впуска, такт сжатия, такт расширения и такт выпуска. В течение такта впуска обычно выпускной клапан 54 закрывается, а впускной клапан 52 открывается. Воздух вовлекается в камеру 30 сгорания через впускной коллектор 44, поршень 36 перемещается к дну цилиндра, чтобы увеличивать объем внутри камеры 30 сгорания. Положение, в котором поршень 36 находится около дна цилиндра и в конце своего хода (например, когда камера 30 сгорания находится при своем наибольшем объеме), типично указывается специалистами в данной области техники ссылкой как нижняя мертвая точка (НМТ, BDC). Во время такта сжатия впускной клапан 52 и выпускной клапан 54 закрыты. Поршень 36 перемещается к головке блока цилиндров, чтобы сжимать воздух внутри камеры 30 сгорания. Точка, в которой поршень 36 находится в конце своего хода и самой близкой к головке блока цилиндров (например, когда камера 30 сгорания находится при своем наименьшем объеме), типично указывается специалистами в данной области техники в качестве верхней мертвой точки (ВМТ, TDC). В процессе, в дальнейшем указываемом ссылкой как впрыск, топливо вводится в камеру сгорания. В процессе, в дальнейшем указываемом ссылкой как воспламенение, впрыснутое топливо воспламеняется известным средством воспламенения, таким как свеча 92 зажигания, приводя к сгоранию.
Во время такта расширения расширяющиеся газы толкают поршень 36 обратно в НМТ. Коленчатый вал 40 преобразует перемещение поршня в крутящий момент вращающегося вала. В заключение во время такта выпуска выпускной клапан 54 открывается, чтобы выпускать подвергнутую сгоранию топливно-воздушную смесь в выпускной коллектор 48, и поршень возвращается в ВМТ. Отметим, что вышеприведенное показано просто в качестве примера, и что установки момента открывания и/или закрывания впускного и выпускного клапанов могут меняться так, чтобы давать положительные или отрицательное перекрытие клапанов, позднее закрывание впускного клапана, или различные другие примеры.
Фиг. 2 показывает транспортное средство 201 и структурную схему привода 200 на ведущие колеса транспортного средства. Привод 200 на ведущие колеса может быть механизирован двигателем 10. Двигатель 10 может запускаться пусковой системой (не показана). Кроме того, двигатель 10 может вырабатывать или регулировать крутящий момент посредством исполнительного механизма 204 крутящего момента, такого как топливная форсунка, дроссель, и т. д.
Крутящий момент на выходе двигателя может передаваться на гидротрансформатор 206, чтобы приводить в движение автоматическую трансмиссию 208. Гидротрансформатор 206 включает в себя насосное колесо 232 и турбину 235. Кроме того, одна или более муфт могут приводиться в зацепление, в том числе муфта 210 переднего хода, для приведения в движение транспортного средства. В одном из примеров гидротрансформатор может указываться ссылкой как компонент трансмиссии. Кроме того, трансмиссия 208 может включать в себя множество зубчатых муфт, которые могут приводиться в зацепление по необходимости, чтобы активировать множество постоянных передаточных чисел. Выходная мощность гидротрансформатора, в свою очередь, может регулироваться муфтой 212 блокировки гидротрансформатора. Например, когда муфта 212 блокировки гидротрансформатора полностью расцеплена, гидротрансформатор 206 передает крутящий момент двигателя на автоматическую трансмиссию 208 посредством переноса текучей среды между турбиной гидротрансформатора и насосным колесом гидротрансформатора, тем самым давая возможность умножения крутящего момента. В противоположность, когда блокировочная муфта 212 гидротрансформатора полностью зацеплена, крутящий момент на выходе двигателя передается непосредственно через муфту гидротрансформатора на входной вал (не показан) трансмиссии 208. В качестве альтернативы муфта 212 блокировки гидротрансформатора может зацепляться частично, тем самым давая возможность регулироваться величине крутящего момента, передаваемого на трансмиссию. Контроллер может быть выполнен с возможностью регулировать величину крутящего момента, передаваемого гидротрансформатором 212, посредством регулировки муфты блокировки гидротрансформатора в ответ на различные условия работы двигателя или на основании основанного на водителе запроса состояния работы двигателя.
Крутящий момент на выходе из автоматической трансмиссии 208, в свою очередь, может передаваться на колеса 216, чтобы приводить транспортное средство в движение. Более точно автоматическая трансмиссия 208 может передавать входной вращающий момент на входном валу 237 в ответ на состояние перемещения транспортного средства перед передачей выходного вращающего момента на колеса.
Кроме того, сила трения может прикладываться к колесам 216 посредством приведения в действие колесных тормозов 147. В одном из примеров колесные тормоза 147 могут приводиться в действие в ответ на нажимание водителем его ступней на тормозную педаль 150 на фиг. 1. Таким же образом сила трения может снижаться в отношении колес 216 посредством отведения колесных тормозов 147 в ответ на отпускание водителем своей ступни с тормозной педали. Кроме того, тормоза транспортного средства могут прикладывать силу трения к колесам 216 в качестве части процедуры автоматического останова двигателя.
Механический масляный насос 214 может находиться в сообщении по текучей среде с автоматической трансмиссией 208, чтобы выдавать гидравлическое давление для приведения в действие различных муфт, таких как муфта 210 переднего хода и/или муфта 212 блокировки гидротрансформатора. Механический масляный насос 214, например, может приводиться в действие в соответствии с гидротрансформатором 212 и может приводиться в движение вращением входного вала двигателя или трансмиссии. Таким образом, гидравлическое давление, вырабатываемое в механическом масляном насосе 214, может повышаться по мере того, как увеличивается скорость вращения двигателя, и может снижаться по мере того, как уменьшается скорость вращения двигателя. Электрический масляный насос 220, также находящийся в сообщении по текучей среде с автоматической трансмиссией, но работающий независимо от движущей силы двигателя 10 или трансмиссии 208, может быть предусмотрен для добавления гидравлического давления механического масляного насоса 214. Электрический масляный насос 220 может приводиться в движение электродвигателем (не показан), на который может подаваться электрическая мощность, например, аккумуляторной батареей (не показана).
Контроллер 12 может быть выполнен с возможностью принимать входные сигналы с двигателя 10, как подробнее показано на фиг. 1, и соответствующим образом управлять крутящим моментом на выходе двигателя и/или работой гидротрансформатора, трансмиссии, сцеплений и/или тормозов. В качестве одного из примеров крутящий момент на выходном валу может управляться посредством регулировки комбинации установки момента зажигания, длительности импульса топлива, установки момента импульса топлива и/или заряда воздуха посредством управления открыванием дросселя и/или установкой фаз клапанного распределения, подъемом клапана и давлением наддува для двигателей с нагнетателем и турбонагнетателем. В случае дизельного двигателя контроллер 12 может управлять крутящим моментом на выходном валу двигателя, управляя комбинацией длительности импульса, установки момента импульса топлива и заряда воздуха. Во всех случаях управление двигателем может выполняться на основе цилиндр за цилиндром, чтобы регулировать крутящий момент на выходном валу двигателя. Кроме того, контроллер 12 может принимать оценку уклона дороги из уклономера.
Когда условия выключения холостого хода удовлетворены, контроллер 42 может инициировать остановку двигателя посредством отключения топлива и зажигания у двигателя. В одном из примеров двигатель может останавливаться в ответ на нулевую скорость вращения двигателя и нажатие тормозной педали транспортного средства. В других условиях двигатель может останавливаться, в то время как транспортное средство является движущимся на данный момент. Например, двигатель может останавливаться, когда требование крутящего момента двигателя меньше, чем пороговый крутящий момент.
Давление колесных тормозов также может регулироваться во время отключения двигателя на основании уклона дороги, скорости вращения двигателя, крутящего момента привода на ведущие колеса или времени после запуска двигателя. В одном из примеров давление масла, подаваемого в тормоза 147 регулируется посредством изменения производительности насоса 289. В качестве альтернативы давление масла в тормозной магистрали может сбрасываться посредством клапана 187 после того, как тормоза нажаты посредством тормозной педали 150, показанной на фиг. 1.
Когда удовлетворены условия запуска и/или водитель транспортного средства желает пустить в ход транспортное средство, контроллер 12 может повторно активировать двигатель, возобновляя сгорание в цилиндрах. Трансмиссия 208 может разблокироваться, и колесные тормоза 147 могут отпускаться, чтобы вернуть крутящий момент на ведущие колеса 216. Давление муфты может регулироваться, чтобы разблокировать трансмиссию наряду с тем, что давление колесных тормозов может регулироваться для координирования отпускания тормозов при разблокировании трансмиссии и пуском в ход транспортного средства.
Таким образом, система по фиг. 1 и 2 предусматривает систему для транспортного средства, содержащую: двигатель; тормозную педаль; тормоза транспортного средства; тормозную педаль транспортного средства; трансмиссию и контроллер, включающий в себя исполняемые команды, хранимые в постоянной памяти, для отпускания тормозов транспортного средства в ответ на состояние двигателя. Система включает в себя те случаи, когда состоянием двигателя является скорость вращения двигателя, и где тормоза транспортного средства отпускаются после отпускания тормозной педали транспортного средства. Система включает в себя те случаи, когда скорость вращения двигателя является скоростью вращения, на которой гидротрансформатор трансмиссии передает большую, чем пороговая, величину крутящего момента двигателя. Система дополнительно содержит дополнительные команды для регулировки величины крутящего момента двигателя в ответ на уклон дороги. Система включает в себя те случаи, когда состоянием двигателя является скорость вращения двигателя, и дополнительно содержащая дополнительные команды для регулировки скорости вращения двигателя, на которой отпускаются тормоза транспортного средства, на основании уклона дороги. Система включает в себя те случаи, когда скорость вращения двигателя, на которой отпускаются тормоза транспортного средства, повышается для увеличения положительного уклона дороги.
Со ссылкой на фиг. 3 показан график моделированной рабочей последовательности транспортного средства согласно способу по фиг. 4.
Первый график сверху по фиг. 3 представляет собой скорость транспортного средства в зависимости от времени. Ось X представляет время, и время увеличивается от левой стороны графика к правой стороне графика. Ось Y представляет скорость транспортного средства, и скорость транспортного средства увеличивается в направлении стрелки оси Y.
Второй график сверху по фиг. 3 представляет собой уклон дороги в зависимости от времени. Ось X представляет время, и время увеличивается от левой стороны графика к правой стороне графика. Ось Y представляет уклон дороги, и уклон дороги положителен (например, вверх по склону) выше оси X и отрицателен (например, вниз по склону) ниже оси X. Уклон дороги возрастает по мере того, как уклон дороги смещается от оси X в направлении стрелок оси Y. Положительный уклон дороги указан посредством +, а отрицательный уклон дороги указан посредством -.
Третий график сверху по фиг. 3 представляет собой состояние двигателя в зависимости от времени. Ось X представляет время, и время увеличивается от левой стороны графика к правой стороне графика. Ось Y представляет состояние двигателя, и двигатель является работающим, когда состояние двигателя находится на верхнем уровне. Двигатель остановлен, когда кривая состояния двигателя находится на нижнем уровне.
Четвертый график сверху по фиг. 3 представляет собой крутящий момент на выходном валу трансмиссии в зависимости от времени. Ось X представляет время, и время увеличивается от левой стороны графика к правой стороне графика. Ось Y представляет крутящий момент на выходном валу трансмиссии, и крутящий момент на выходном валу трансмиссии возрастает в направлении стрелки оси Y.
Пятый график сверху по фиг. 3 представляет собой скорость вращения двигателя в зависимости от времени. Ось X представляет время, и время увеличивается от левой стороны графика к правой стороне графика. Ось Y представляет скорость вращения двигателя, и скорость вращения двигателя увеличивается в направлении стрелки оси Y.
Шестой график сверху по фиг. 3 представляет собой состояние тормозной педали транспортного средства в зависимости от времени. Ось X представляет время, и время увеличивается от левой стороны графика к правой стороне графика. Ось Y представляет состояние тормозной педали транспортного средства, и тормозная педаль транспортного средства нажата, когда кривая состояния тормозной педали транспортного средства находится на верхнем уровне. Тормозная педаль транспортного средства не нажата, когда состояние тормозной педали транспортного средства находится на нижнем уровне.
Седьмой график сверху по фиг. 3 представляет собой состояние тормозов транспортного средства в зависимости от времени. Ось X представляет время, и время увеличивается от левой стороны графика к правой стороне графика. Ось Y представляет состояние тормозной педали транспортного средства, и тормозная педаль транспортного средства нажата, когда кривая состояния тормозов транспортного средства находится на верхнем уровне. Тормоза транспортного средства не нажаты, когда состояние тормозов транспортного средства находится на нижнем уровне.
В момент T0 времени транспортное средство движется, и уклон дороги является нулевым. Двигатель также является работающим, а трансмиссия выдает крутящий момент для приведения в движение транспортного средства. Тормозная педаль и тормоза не нажаты. Таким образом, транспортное средство передвигается на умеренной скорости.
В момент T1 времени крутящий момент требования водителя уменьшается в ответ на отпускание водителем педали акселератора (не показана). Скорость вращения двигателя, скорость транспортного средства и крутящий момент на выходе трансмиссии уменьшаются в ответ на уменьшение крутящего момента требования водителя. Двигатель продолжает работать, а уклон дороги остается на нуле. К тому же водитель нажимает тормозную педаль, чтобы уменьшить скорость транспортного средства. Тормоза транспортного средства нажимаются в ответ на нажатие водителем тормозной педали, как указано состоянием тормозной педали и состояниями тормозов, переходящими на верхние уровни.
В момент T2 времени скорость транспортного средства достигает нуля, и двигатель автоматически останавливается (например, останавливается без водительского ввода в устройство, которое имеет единственное назначение останова и/или запуска двигателя). Двигатель останавливается в ответ на нулевую скорость транспортного средства и нажимаемую тормозную педаль. Состояние двигателя и скорость вращения двигателя переходят на нижние уровни, когда двигатель останавливается. Крутящий момент на выходном валу трансмиссии также переходит на ноль, поскольку двигатель остановлен. Тормозная педаль и тормоза продолжают быть нажатыми.
В момент T3 времени тормозная педаль транспортного средства отпускается водителем, и тормоза транспортного средства отпускаются, когда двигатель отпускает тормозную педаль транспортного средства. Двигатель также перезапускается в ответ на отпускание водителем тормозной педали. Уклон дороги является нулевым, поэтому тормоза транспортного средства отпускаются по мере того, как водитель отпускает тормозную педаль, так как нет отрицательного уклона, чтобы вызывать зазор в шестернях привода на ведущие колеса, и поскольку уклон не является положительным, что могло заставить транспортное средство катиться вниз по склону. Крутящий момент на выходном валу трансмиссии возрастает по мере того, как возрастает скорость вращения двигателя, и крутящий момент передается с двигателя на трансмиссию.
В момент T5 времени скорость транспортного средства начинает возрастать в ответ на возрастающий крутящий момент на выходном валу трансмиссии. Двигатель продолжает работать, как указано состоянием двигателя, остающемся на высоком уровне. Скорость вращения двигателя возрастает по мере того, как водитель повышает крутящий момент требования водителя (не показан). Уклон дороги остается на нуле, а тормозная педаль и тормоза не нажаты.
Между моментом T4 времени и моментом T5 времени уклон дороги возрастает в положительном направлении, и двигатель и транспортное средство продолжают работать. Трансмиссия также продолжает выводить крутящий момент с двигателя, и тормозная педаль и тормоза не введены в действие.
В момент T5 времени крутящий момент требования водителя уменьшается в ответ на отпускание водителем педали акселератора (не показана). Скорость вращения двигателя, скорость транспортного средства и крутящий момент на выходе трансмиссии уменьшаются в ответ на уменьшение крутящего момента требования водителя. Двигатель продолжает работать, а уклон дороги остается на более высоком положительном значении. К тому же водитель нажимает тормозную педаль, чтобы уменьшить скорость транспортного средства. Тормоза транспортного средства нажимаются в ответ на нажатие водителем тормозной педали, как указано состоянием тормозной педали и состояниями тормозов, переходящими на верхние уровни.
В момент T6 времени скорость транспортного средства достигает нуля, и двигатель автоматически останавливается. Двигатель останавливается в ответ на нулевую скорость транспортного средства и нажимаемую тормозную педаль. Состояние двигателя и скорость вращения двигателя переходят на нижние уровни, когда двигатель останавливается. Крутящий момент на выходном валу трансмиссии также переходит на ноль, поскольку двигатель остановлен. Тормозная педаль и тормоза продолжают быть нажатыми. Уклон дороги оценивается, чтобы определять, управляются или нет тормоза транспортного средства в ответ на уклон дороги.
В момент T7 времени тормозная педаль транспортного средства отпускается водителем, а тормоза транспортного средства остаются в нажатом состоянии. Тормоза транспортного средства могут оставаться нажатыми посредством ограничения уменьшения давления в тормозной магистрали посредством клапана. В качестве альтернативы насос может использоваться для удержания давления тормозов на повышенном уровне. Двигатель также перезапускается в ответ на отпускание водителем тормозной педали. Уклон дороги является положительным и ненулевым, поэтому тормоза транспортного средства остаются находящимися в зацеплении до тех пор, пока не возникают выбранные условия. Транспортное средство остается неподвижным на положительном уклоне.
Между моментом T7 времени и моментом T8 времени тормоза отпущены. Тормоза могут отпускаться во время выбранных условий, которые могут включать в себя скорость вращения двигателя, превышающее пороговую скорость вращения двигателя. Посредством задержки отпускания тормозов до тех пор, пока скорость вращения двигателя не достигает пороговой скорости вращения, предоставляется возможность, чтобы гидротрансформатор выводил положительный крутящий момент, так чтобы колеса транспортного средства могли не двигаться до тех пор, пока крутящего момента привода на ведущие колеса на достаточно, чтобы перемещать транспортное средство в прямом направлении. Дополнительно пороговое значение скорости вращения двигателя, на которой отпускаются тормоза, может меняться в зависимости от положительного уклона дороги. Например, если транспортное средство остановлено на низком уклоне, тормоза могут отпускаться на первой, более низкой скорости вращения двигателя. Если транспортное средство остановлено на более высоком уклоне, тормоза могут отпускаться на второй, более высокой скорости вращения двигателя. В еще одном примере, тормоза могут отпускаться, когда величина крутящего момента привода на ведущие колеса является пороговой величиной крутящего момента. Например, тормоза могут отпускаться, когда крутящий момент на турбине гидротрансформатора больше, чем пороговый крутящий момент, и где пороговый крутящий момент меняется в зависимости от уклона дороги. Например, пороговый крутящий момент возрастает с увеличением уклона дороги (например, отдалением от нулевого уклона). Пороговый крутящий момент убывает с уменьшением уклона дороги (например, приближением к нулевому уклону). В других примерах, тормоза могут отпускаться спустя пороговое время после останова двигателя.
В момент T8 времени скорость транспортного средства начинает возрастать в ответ на возрастающий крутящий момент на выходном валу трансмиссии. Двигатель продолжает работать, как указано состоянием двигателя, остающемся на высоком уровне. Скорость вращения двигателя возрастает по мере того, как водитель повышает крутящий момент требования водителя (не показан). Уклон дороги начинает убывать в направлении нуля, и тормозная педаль и тормоза не нажаты.
Между моментом T8времени и моментом T9 времени уклон дороги уменьшается и меняется с положительного уклона на отрицательный уклон. Трансмиссия также продолжает выводить крутящий момент с двигателя, и тормозная педаль и тормоза не введены в действие.
В момент T9 времени крутящий момент требования водителя уменьшается в ответ на отпускание водителем педали акселератора (не показана). Скорость вращения двигателя, скорость транспортного средства и крутящий момент на выходе трансмиссии уменьшаются в ответ на уменьшение крутящего момента требования водителя. Двигатель продолжает работать, а уклон дороги находится на большем отрицательном значении. К тому же водитель нажимает тормозную педаль, чтобы уменьшить скорость транспортного средства. Тормоза транспортного средства нажимаются в ответ на нажатие водителем тормозной педали, как указано состоянием тормозной педали и состояниями тормозов, переходящими на верхние уровни.
В момент T10 времени скорость транспортного средства достигает нуля, и двигатель автоматически останавливается. Двигатель останавливается в ответ на нулевую скорость транспортного средства и нажимаемую тормозную педаль. Состояние двигателя и скорость вращения двигателя переходят на нижние уровни, когда двигатель останавливается. Крутящий момент на выходном валу трансмиссии также переходит на ноль, поскольку двигатель остановлен. Тормозная педаль и тормоза продолжают быть нажатыми. Уклон дороги оценивается, чтобы определять, управляются или нет тормоза транспортного средства в ответ на уклон дороги.
В момент T11 времени тормозная педаль транспортного средства отпускается водителем, а тормоза транспортного средства остаются в нажатом состоянии. Тормоза транспортного средства могут оставаться нажатыми посредством ограничения уменьшения давления масла в тормозной магистрали посредством клапана. В качестве альтернативы насос может использоваться для удержания давления масла тормозов на повышенном уровне. Двигатель также перезапускается в ответ на отпускание водителем тормозной педали. Уклон дороги является отрицательным и ненулевым, поэтому тормоза транспортного средства остаются находящимися в зацеплении до тех пор, пока не возникают выбранные условия. Однако если тормоза не нажимались, зазор может развиваться между шестернями, или натяжение может ослабляться в цепном приводе в приводе на ведущие колеса. Посредством нажатия тормозов, транспортное средство не может скатываться вниз по склону и раскрывать промежуток между зубьями шестерен или ослаблять натяжение внутри цепного привода. Транспортное средство остается неподвижным на положительном уклоне.
Между моментом T11 времени и моментом T12 времени тормоза отпущены. Тормоза могут отпускаться во время выбранных условий, которые могут включать в себя скорость вращения двигателя, превышающая пороговую скорость вращения двигателя. Посредством задержки отпускания тормозов до тех пор, пока скорость вращения двигателя не достигает пороговой скорости вращения, предоставляется возможность, чтобы гидротрансформатор выводил положительный крутящий момент, так чтобы зазор мог ограничиваться между шестернями. Дополнительно пороговое значение скорости вращения двигателя, на котором отпускаются тормоза, может меняться в зависимости от отрицательного уклона дороги. Например, если транспортное средство остановлено на низком отрицательном уклоне, тормоза могут отпускаться на первой, более низкой скорости вращения двигателя. Если транспортное средство остановлено на более высоком уклоне, тормоза могут отпускаться на второй, более высокой скорости вращения двигателя. В еще одном примере, тормоза могут отпускаться, когда величина крутящего момента привода на ведущие колеса является пороговой величиной крутящего момента. Например, тормоза могут отпускаться, когда крутящий момент на турбине гидротрансформатора больше, чем пороговый крутящий момент, и где пороговый крутящий момент меняется в зависимости от уклона дороги. Например, пороговый крутящий момент возрастает с уменьшением уклона дороги (например, приближением к нулевому уклону). Пороговый крутящий момент убывает с увеличением уклона дороги (например, приближением к нулевому уклону). В других примерах, тормоза могут отпускаться спустя пороговое время после останова двигателя.
В момент T12 времени скорость транспортного средства начинает возрастать в ответ на возрастающий крутящий момент на выходном валу трансмиссии и уклон дороги. Двигатель продолжает работать, как указано состоянием двигателя, остающемся на высоком уровне. Скорость вращения двигателя возрастает по мере того, как водитель повышает крутящий момент требования водителя (не показан). Уклон дороги начинает убывать в направлении нуля, и тормозная педаль и тормоза не нажаты.
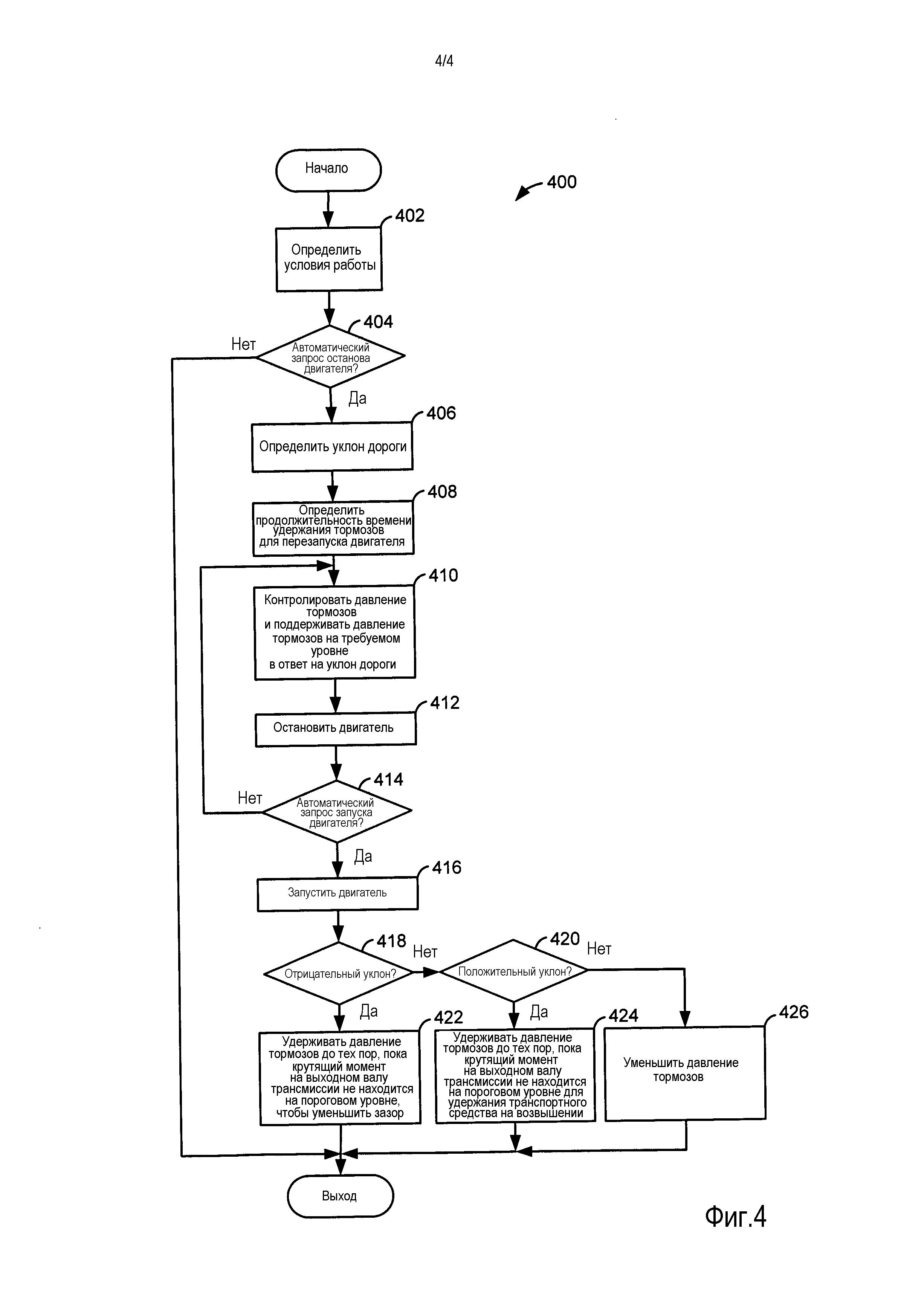
Далее со ссылкой на фиг. 4 описан способ управления транспортным средством. Способ по фиг. 4 может храниться в качестве исполняемых команд в постоянной памяти контроллера 12, описанного на фиг. 1 и 2. Кроме того, способ по фиг. 4 может предусматривать рабочую последовательность, проиллюстрированную на фиг. 3.
На этапе 402 способ 400 определяет условия работы. Условия работы могут включать в себя, но не в качестве ограничения, скорость вращения двигателя, нагрузку двигателя, скорость транспортного средства, крутящий момент требования водителя и температуру двигателя. Способ 400 переходит на этап 404 после того, как определены условия работы.
На этапе 404 способ 400 оценивает, есть или нет автоматический останов двигателя (например, запрос останова двигателя без специального запрашивания водителем останова двигателя через устройство ввода, которое имеет единственную функцию останова и/или запуска двигателя). В одном из примеров запрос автоматического останова двигателя может производиться, когда скорость транспортного средства меньше, чем пороговая скорость, наряду с тем, что нажата тормозная педаль транспортного средства. Если способ 400 делает вывод, что произошел автоматический запрос останова двигателя, ответом является «Да», и способ 400 переходит на этап 406. Иначе ответом является «Нет», и способ 400 переходит на выход.
На этапе 406 способ 400 определяет уклон дороги. В одном из примеров уклон дороги определяется посредством уклономера. В других примерах, уклон дороги может логически выводиться посредством акселерометра. Способ 400 переходит на этап 408 после того, как определен уклон дороги.
На этапе 408 способ 400 определяет продолжительность времени удержания тормозов. В одном из примеров способ 400 определяет разные продолжительности времени удержания тормозов в зависимости от того, остановлено ли транспортное средство на положительном, отрицательном или нулевом уклоне.
В одном из примеров, если транспортное средство остановлено на дороге, имеющей нулевой уклон, тормоза транспортного средства могут отпускаться, когда водитель отпускает тормозную педаль. В качестве альтернативы тормозная педаль может отпускаться через заданное время после того, как водитель отпускает тормозную педаль.
Если транспортное средство остановлено на положительном уклоне, способ 400 может решать удерживать тормоза транспортного средства нажатыми, в то время как скорость вращения двигателя является нулевой и до тех пор, пока скорость вращения двигателя не достигает и/или не переходит через пороговую скорость вращения. Пороговая скорость вращения может меняться в зависимости от уклона. Например, пороговая скорость вращения двигателя может повышаться по мере того, как возрастает уклон дороги. Посредством предоставления скорости вращения двигателя возможности достигать пороговой скорости вращения может быть возможным выдавать известную величину крутящего момента из гидротрансформатора, поскольку отдача гидротрансформатора является зависимой от скорости вращения.
В одном из примеров пороговая скорость вращения двигателя основана на скорости вращения срыва потока гидротрансформатора. В еще одном примере, тормоза транспортного средства могут удерживаться нажатыми от нулевой скорости вращения двигателя до заданного времени после того, как двигатель начинает вращаться (например, времени после останова двигателя). Заданное время может меняться в зависимости от уклона дороги. Например, заданное время может увеличиваться по мере того, как возрастает уклон дороги. В кроме того еще одном варианте осуществления, тормоза транспортного средства могут удерживаться нажатыми до тех пор, пока крутящие моменты на выходном валу двигателя и/или трансмиссии не достигают пороговых уровней после останова двигателя. Например, тормоза транспортного средства могут удерживаться в нажатом состоянии после останова двигателя до тех пор, пока крутящий момент на выходном валу трансмиссии не находится по меньшей мере 20 Н∙м. Пороговый крутящий момент на выходном валу двигателя и/или трансмиссии может меняться в зависимости от уклона дороги. Например, пороговый крутящий момент двигателя и/или трансмиссии может возрастать по мере того, как увеличивается уклон дороги. Пороговый крутящий момент двигателя и/или трансмиссии может убывать по мере того, как уменьшается уклон дороги. В одном из примеров тормоза транспортного средства удерживаются до тех пор, пока крутящий момент на выходном валу трансмиссии не имеет значения по меньшей мере:

где wheel_tor - крутящий момент на ведомом колесе, trans_tor - крутящий момент на выходном валу трансмиссии, NFD - передаточное число главной передачи, r - радиус колеса, m - масса транспортного средства, g - коэффициент силы тяжести, а sin Θ - синус угла дороги (например, связанного с уклоном).
Крутящие моменты на выходном валу двигателя и трансмиссии могут логически выводиться на основании скорости вращения двигателя, нагрузки двигателя, скорости вращения насосного колеса трансмиссии, скорости вращения турбины трансмиссии и выбранной на данный момент передачи трансмиссии. Например, крутящий момент двигателя может определяться опытным путем и сохраняться в памяти, которая индексируется согласно скорости вращения и нагрузке двигателя. Оцененный крутящий момент двигателя выводится в известную модель гидротрансформатора, и модель гидротрансформатора выводит крутящий момент, который умножен на данное передаточное отношение, чтобы выдавать оцененный крутящий момент на выходном валу трансмиссии.
Подобным образом, если транспортное средство остановлено на отрицательном уклоне, способ 400 может решать удерживать тормоза транспортного средства нажатыми, в то время как скорость вращения двигателя является нулевой и до тех пор, пока скорость вращения двигателя не достигает и/или не переходит через пороговую скорость вращения. Пороговая скорость вращения может меняться в зависимости от уклона. Например, пороговая скорость вращения двигателя может понижаться по мере того, как возрастает отрицательный уклон дороги. Посредством предоставления скорости вращения двигателя возможности достигать пороговой скорости вращения, может быть возможным выдавать известную величину крутящего момента из гидротрансформатора для уменьшения вероятности зазора шестерен привода на ведущие колеса, поскольку отдача гидротрансформатора является зависимой от скорости вращения.
В одном из примеров пороговая скорость вращения двигателя основана на скорости вращения срыва потока гидротрансформатора. В еще одном примере, тормоза транспортного средства могут удерживаться нажатыми от нулевой скорости вращения двигателя до заданного времени после того, как двигатель начинает вращаться (например, времени после останова двигателя). Заданное время может меняться в зависимости от уклона дороги. Например, заданное время может увеличиваться по мере того, как возрастает отрицательный уклон дороги (например, удаляется от нулевого уклона дороги). Кроме того, в еще одном варианте осуществления, тормоза транспортного средства могут удерживаться нажатыми до тех пор, пока крутящие моменты на выходном валу двигателя и/или трансмиссии не достигают пороговых уровней после останова двигателя. Например, тормоза транспортного средства могут удерживаться в нажатом состоянии после останова двигателя до тех пор, пока крутящий момент на выходном валу двигателя не имеет значение по меньшей мере 10 Н∙м, так чтобы положительный крутящий момент прикладывался к приводу на ведущие колеса, чтобы уменьшать вероятность зазора, если транспортное средство начинает катиться после запуска двигателя. Пороговый крутящий момент на выходном валу двигателя и/или трансмиссии может меняться в зависимости от отрицательного уклона дороги. Например, пороговый крутящий момент двигателя и/или трансмиссии может возрастать по мере того, как увеличивается отрицательный уклон дороги. Пороговый крутящий момент двигателя и/или трансмиссии может убывать по мере того, как уменьшается отрицательный уклон дороги. Крутящие моменты на выходном валу двигателя и трансмиссии могут логически выводиться на основании скорости вращения двигателя, нагрузки двигателя, скорости вращения насосного колеса трансмиссии, скорости вращения турбины трансмиссии, и выбранной на данный момент передачи трансмиссии. Способ 400 переходит на этап 410 после того, как определена продолжительность времени удержания тормозов.
На этапе 410 способ 400 контролирует давление тормозов и поддерживает давление тормозов в ответ на уклон дороги. В одном из примеров давление масла в тормозной магистрали контролируется по мере того, как водитель нажимает тормоза, и транспортное средство останавливается. Если способ 400 делает вывод, что тормоза транспортного средства будут удерживаться нажатыми после того, как водитель отпускает тормозную педаль, клапан может ограничивать поток масла из тормозных приводов, чтобы сохранять давление тормозов. В других примерах, насос может удерживать давление масла на уровне, используемом водителем для остановки транспортного средства. Кроме того, в других примерах, давление на выходе насоса может регулироваться на основании уклона дороги. Например, если уклон дороги возрастает, давление в насосе может повышаться, чтобы удерживать транспортное средство на возвышении. В других примерах, где транспортное средство остановлено на нулевом уклоне, давление масла в тормозной магистрали может просто отслеживать входной сигнал водителя на тормозную педаль. Способ 400 переходит на этап 412 после того, как настроено давление тормозов.
На этапе 412 способ 400 останавливает двигатель. Двигатель может останавливаться посредством прекращения потока топлива и/или искры у двигателя. Способ 400 переходит на этап 414 после выдачи двигателю команды остановиться.
На этапе 414 способ 400 оценивает, есть ли запрос для автоматического перезапуска двигателя. Двигатель может автоматически перезапускаться в ответ на отпускание водителем тормозной педали или некоторое другое условие. Если способ 400 делает вывод, что двигатель должен автоматически перезапускаться, ответом является «Да», и способ 400 переходит на этап 416. Иначе ответом является «Нет», и способ 400 возвращается на этапе 410.
На этапе 416 двигатель автоматически запускается. Двигатель может автоматически перезапускаться посредством включения стартера и подачи искры и топлива в двигатель. Способ 400 переходит на этап 418 после того, как двигатель начинает вращение для запуска.
На этапе 418 способ 400 оценивает, является или нет уклон дороги отрицательным. В одном из примеров способ 400 делает вывод, что уклон дороги отрицателен, на основании выходного сигнала уклономера. Если уклон дороги отрицателен, ответом является «Да», и способ 400 переходит на этап 422. Иначе ответом является «Нет», и способ 400 переходит на этап 420.
На этапе 422 способ 400 удерживает тормоза транспортного средства в нажатом состоянии в течение продолжительности времени, определенной на этапе 408. Поскольку транспортное средство остановлено на отрицательном уклоне, оно может иметь тенденцию стремиться катиться вперед и создавать зазор между шестернями или ослаблять натяжение в приводной цепи; однако небольшой крутящий момент привода на ведущие колеса может требоваться для приведения транспортного средства в движение с горы. Следовательно, величина положительного крутящего момента, приложенного к приводу на ведущие колеса для уменьшения зазора, может быть меньшей, чем величина положительного крутящего момента, приложенного к приводу на ведущие колеса, когда уклон дороги положителен. Способ 400 переходит на выход после того, как требуемая величина положительного крутящего момента приложена к приводу на ведущие колеса.
На этапе 420 способ 400 оценивает, является или нет уклон дороги положительным. В одном из примеров способ 400 делает вывод, что уклон дороги положителен, на основании выходного сигнала уклономера. Если уклон дороги положителен, ответом является «Да», и способ 400 переходит на этап 424. Иначе ответом является «Нет», и способ 400 переходит на этап 426.
На этапе 424 способ 400 удерживает тормоза транспортного средства в нажатом состоянии в течение продолжительности времени, определенной на этапе 408. Поскольку транспортное средство остановлено на положительном уклоне, оно может иметь тенденцию стремиться откатываться назад. Положение транспортного средства может поддерживаться посредством удержания тормозов в нажатом состоянии до тех пор, пока крутящий момент на выходном валу трансмиссии не равен или не больше, чем сила тяжести, действующая на возвышении. Следовательно, величина положительного крутящего момента, приложенного к приводу на ведущие колеса для удержания транспортного средства на месте или движения в гору, может быть большей, чем величина положительного крутящего момента, приложенного к приводу на ведущие колеса, когда уклон дороги отрицателен. Способ 400 переходит на выход после того, как требуемая величина положительного крутящего момента приложена к приводу на ведущие колеса.
На этапе 426 способ 400 снижает давление тормозов одновременно с тем, как водитель отпускает тормоз. В качестве альтернативы давление тормозов может ослабляться через заданное время после того, как водитель отпускает тормоз. Посредством снижения давления тормозов тормоза могут отпускаться. Способ 400 переходит на выход после того, как тормоза отпущены.
Таким образом, тормоза транспортного средства могут приводиться в действие во время автоматического запуска двигателя, чтобы уменьшать вероятность создания зазора между шестернями или потери натяжения цепного привода, когда транспортное средство остановлено на отрицательном уклоне. Кроме того, тормоза транспортного средства могут удерживаться в нажатом состоянии, когда двигатель автоматически перезапускается, в то время как транспортное средство остановлено на положительном уклоне, чтобы уменьшать движение транспортного средства.
Таким образом, способ по фиг. 4 предусматривает запуск двигателя, содержащий: автоматический запуск двигателя и удержание тормоза транспортного средства в ответ на уклон дороги после того, как тормозная педаль транспортного средства, которая приводит в действие тормоза транспортного средства, отпущена. Способ включает в себя те случаи, когда продолжительность времени, которую удерживаются тормоза транспортного средства, основана на уклоне дороги. Способ дополнительно содержит автоматический останов двигателя перед автоматическим запуском двигателя. Способ включает в себя те случаи, когда удержание тормозов транспортного средств включает в себя этап, на котором поддерживают давление тормозного масла. Способ включает в себя те случаи, когда продолжительность времени, которую удерживаются тормоза транспортного средства, основана на скорости вращения двигателя. Способ включает в себя те случаи, когда продолжительность времени, которую удерживаются тормоза транспортного средства, основана на величине крутящего момента привода на ведущие колеса, вырабатываемого посредством двигателя после запуска двигателя. Способ также включает в себя те случаи, когда продолжительность времени, которую удерживаются тормоза транспортного средства, основана на времени после того, как скорость вращения двигателя превышает пороговую скорость вращения.
В еще одном примере, способ по фиг. 4 предусматривает запуск двигателя, содержащий: автоматический запуск двигателя и удержание тормозов транспортного средства в ответ на крутящий момент привода на ведущие колеса после того, как тормозная педаль транспортного средства, которая приводит в действие тормоза транспортного средства, отпущена. Способ включает в себя те случаи, когда крутящий момент привода на ведущие колеса является уровнем крутящего момента привода на ведущие колеса, который меняется в зависимости от уклона дороги. Способ включает в себя те случаи, когда крутящий момент привода на ведущие колеса является уровнем крутящего момента привода на ведущие колеса, который меняется в зависимости от положительного или отрицательного уклона дороги. Способ включает в себя те случаи, когда уровень крутящего момента привода на ведущие колеса возрастает с большей скоростью для положительного уклона дороги, чем для отрицательного уклона дороги. Способ дополнительно содержит удержание тормозов транспортного средства давлением, основанным на входном сигнале с тормозной педали транспортного средства. Способ включает в себя те случаи, когда давление, основанное на входном сигнале с тормозной педали, является давлением, которое развивается в тормозной магистрали, в то время как нажата тормозная педаль. Способ дополнительно содержит автоматический останов двигателя перед автоматическим запуском двигателя.
Как следует принимать во внимание рядовым специалистам в данной области техники, процедуры, описанные на фиг. 4, могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемая событиями, управляемая прерыванием, многозадачная, многопоточная и тому подобная. По существу, различные проиллюстрированные этапы или функции могут выполняться в проиллюстрированной последовательности, параллельно или в некоторых случаях пропускаться. Подобным образом порядок обработки не обязательно требуется для достижения целей, признаков и преимуществ, описанных в материалах настоящего описания, но приведен для облегчения иллюстрации и описания. Хотя не проиллюстрировано явным образом, рядовой специалист в данной области техники будет осознавать, что одни или более из проиллюстрированных этапов или функций могут выполняться неоднократно, в зависимости от конкретной используемой стратегии.
Это завершает описание. Прочтение его специалистами в данной области техники напомнило бы многие изменения и модификации, не выходя из сущности и объема описания. Например, рядные двигатели I3, I4, I5, V-образные двигатели V6, V8, V10 и V12, работающие на природном газе, бензине, дизельном топливе или альтернативных топливных конфигурациях, могли бы использовать настоящее описание для получения преимущества.
Реферат
1. Система управления работой транспортного средства, содержащая:двигатель;тормозную педаль;тормоза транспортного средства;тормозную педаль транспортного средства;трансмиссию; иконтроллер, включающий в себя исполняемые команды, хранимые в постоянной памяти, для отпускания тормозов транспортного средства в ответ на состояние двигателя.2. Система по п.1, в которой состоянием двигателя является скорость вращения двигателя, при этом тормоза транспортного средства отпускаются после отпускания тормозной педали транспортного средства.3. Система по п.2, в которой скорость вращения двигателя является скоростью вращения, на которой гидротрансформатор трансмиссии передает большую, чем пороговая, величину крутящего момента двигателя.4. Система по п.1, дополнительно содержащая дополнительные команды для регулировки величины крутящего момента двигателя в ответ на уклон дороги.5. Система по п.1, в которой состоянием двигателя является скорость вращения двигателя, при этом система дополнительно содержит дополнительные команды для регулировки скорости вращения двигателя, на которой отпускаются тормоза транспортного средства, на основании уклона дороги.6. Система по п.5, в которой скорость вращения двигателя, на которой отпускаются тормоза транспортного средства, повышается для увеличения положительного уклона дороги.
Формула

Комментарии