Способ эксплуатации стартстопной системы транспортного средства (варианты) - RU2600965C2
Код документа: RU2600965C2
Чертежи
Описание
Настоящее изобретение относится к способу эксплуатации стартстопных систем в транспортных средствах, содержащих двигатели внутреннего сгорания (ДВС) и автоматические сцепления.
Микрогибридными транспортными средствами называют транспортные средства, содержащие двигатели внутреннего сгорания, электродвигатели стартера стандартного размера, в частности так называемые электродвигателем стартера с коленчатым валом (интегрированный стартер-генератор, ISG), а также систему рекуперации энергии торможения для зарядки стартерной аккумуляторной батареи малого размера. Автоматическая стартстопная система позволяет автоматически остановить, т.е. отключить, двигатель внутреннего сгорания, если нет потребности в движущей силе (например, при движении по инерции), а также повторно включить его, когда он снова потребуется. Также двигатель внутреннего сгорания можно отключить от остальной системы трансмиссии и работать с ним на холостом ходу.
Автоматическая стартстопная система останавливает двигатель внутреннего сгорания, если водитель не нажимает на педаль газа, так как в данный момент нет необходимости движущей силы. Двигатель внутреннего сгорания отсоединен от остальной системы трансмиссии и работает на холостом ходу или же (как было упомянуто выше) отключается полностью. В обоих случаях экономится топливо, так как устраняется тяговый момент двигателя, возникающий за счет кинетической энергии транспортного средства, так что уменьшается задержка транспортного средства. В первом случае, при так называемом движении по инерции, когда двигатель работает на холостом ходу, электрический ток продолжает вырабатываться, поэтому питание потребителей электроэнергии в транспортном средстве обеспечено в любом случае. Во втором случае, при так называемом свободном качении или при сочетании качения со стартстопным режимом работы, потребители электроэнергии в транспортном средстве вынуждены получать питание от батареи, а при повторной зарядке батареи во время работы двигателя внутреннего сгорания потребляется дополнительное топливо.
Оба указанных способа, движение по инерции и свободное качение, могут быть использованы в любых системах трансмиссии с возможностью автоматического разъединения. К таким системам трансмиссии относятся не только автоматические коробки передач (стандартные гидромеханические коробки передач или коробки передач DSG), но и механические коробки передач с автоматическим переключением передач (ASM), бесступенчатые коробки передач (CVT), а также ручные коробки передач, оснащенные электрическим или электронным сцеплением.
Размыкание системы трансмиссии в начале стадии экономного потребления топлива влияет на динамику движения, так как при размыкании системы трансмиссии исчезает тяговый момент двигателя внутреннего сгорания, имеющий место тогда, когда педаль газа не нажата. В некоторых дорожных ситуациях, например при движении под уклон, это может быть нежелательно. Также можно предусмотреть определенную задержку при размыкании системы трансмиссии, например, для предотвращения постоянного размыкания и сцепления. Различные ситуации, в которых автоматическое размыкание системы трансмиссии при использовании автоматической стартстопной системы может быть блокировано или осуществлено с задержкой, описаны в следующих публикациях: ЕР 1358405 В1, ЕР 1453695 В1, ЕР 1534554 B1, DE 102008029453 A1, DE 10349445 A1, DE 10221701 А1 и DE 4213589 А1.
Задачей данного изобретения является улучшение работы автоматической стартстопной системы в транспортном средстве, в том числе с точки зрения безопасности.
Данная задача решается за счет применения способа, описанного в формуле изобретения.
Настоящее изобретение основано на том, что внезапно возникающая для водителя опасная ситуация может быть усугублена неожиданной реакцией транспортного средства. Данное изобретение помогает избежать этого. Предпочтительные варианты реализации настоящего изобретения описаны в зависимых пунктах формулы изобретения.
В настоящем изобретении раскрыт способ эксплуатации автоматической стартстопной системы в транспортном средстве, содержащем двигатель внутреннего сгорания и автоматическое сцепление, при этом автоматическая стартстопная система автоматически размыкает сцепление в зависимости от необходимости движущей силы; при этом в определенных дорожных ситуациях автоматическое размыкание сцепления заблокировано. При этом автоматически распознают опасные дорожные ситуации, в которых автоматическое размыкание сцепление должно быть заблокировано.
Автоматическое распознавание дорожной ситуации как опасной ситуации происходит, если выполнено одно или более условий: изменение высоты положения педали тормоза или давления тормозной системы во времени превышает заданное пороговое значение; значение изменения угла поворота рулевого колеса во времени превышает заданное пороговое значение; водитель предпринимает какое-либо действие, призванное предупредить других участников дорожного движения об опасной ситуации, распознанной им; присутствует по меньшей мере один из критериев, на основании которых система помощи водителю или система предотвращения столкновений, содержащаяся в транспортном средстве, оценивает потенциал опасности текущей дорожной ситуации.
По истечении определенного временного интервала после начала блокировки размыкания сцепления размыкание сцепления снова становится возможным. Продолжительность временного интервала зависит от типа используемого критерия.
Таким образом, согласно первому объекту настоящего изобретения создан способ эксплуатации стартстопной системы в транспортном средстве, содержащем двигатель и автоматическое сцепление, при котором: выдают, при работе стартстопной системы, команду на блокировку размыкания сцепления в ответ на то, что (а) автоматическое сцепление является замкнутым и (б) изменение давления тормозной системы во времени или изменение высоты положения педали тормоза во времени превышает пороговое значение, так что автоматическое сцепление остается замкнутым и предотвращается автоматическая остановка двигателя на заданный период времени.
Согласно второму объекту изобретения создан способ эксплуатации стартстопной системы в транспортном средстве, содержащем двигатель и автоматическое сцепление, при котором: выдают, при работе стартстопной системы, команду на блокировку размыкания сцепления в ответ на то, что автоматическое сцепление является замкнутым и изменение угла поворота рулевого колеса во времени превышает пороговое значение, так что автоматическое сцепление остается замкнутым и предотвращается автоматическая остановка двигателя на заданный период времени.
Согласно третьему объекту изобретения создан способ эксплуатации стартстопной системы в транспортном средстве, содержащем двигатель, трансмиссию и автоматическое сцепление, выполненное с возможностью осуществления, в замкнутом состоянии, соединения двигателя с трансмиссией, причем согласно способу: выдают, при работе стартстопной системы, команду на блокировку замыкания сцепления в ответ на то, что автоматическое сцепление является разомкнутым и изменение угла поворота рулевого колеса во времени превышает пороговое значение, так что автоматическое сцепление остается разомкнутым и двигатель остается отсоединенным от трансмиссии на заданный период времени.
В любом из вышеприведенных объектов настоящего изобретения указанный заданный период времени может зависеть от скорости транспортного средства.
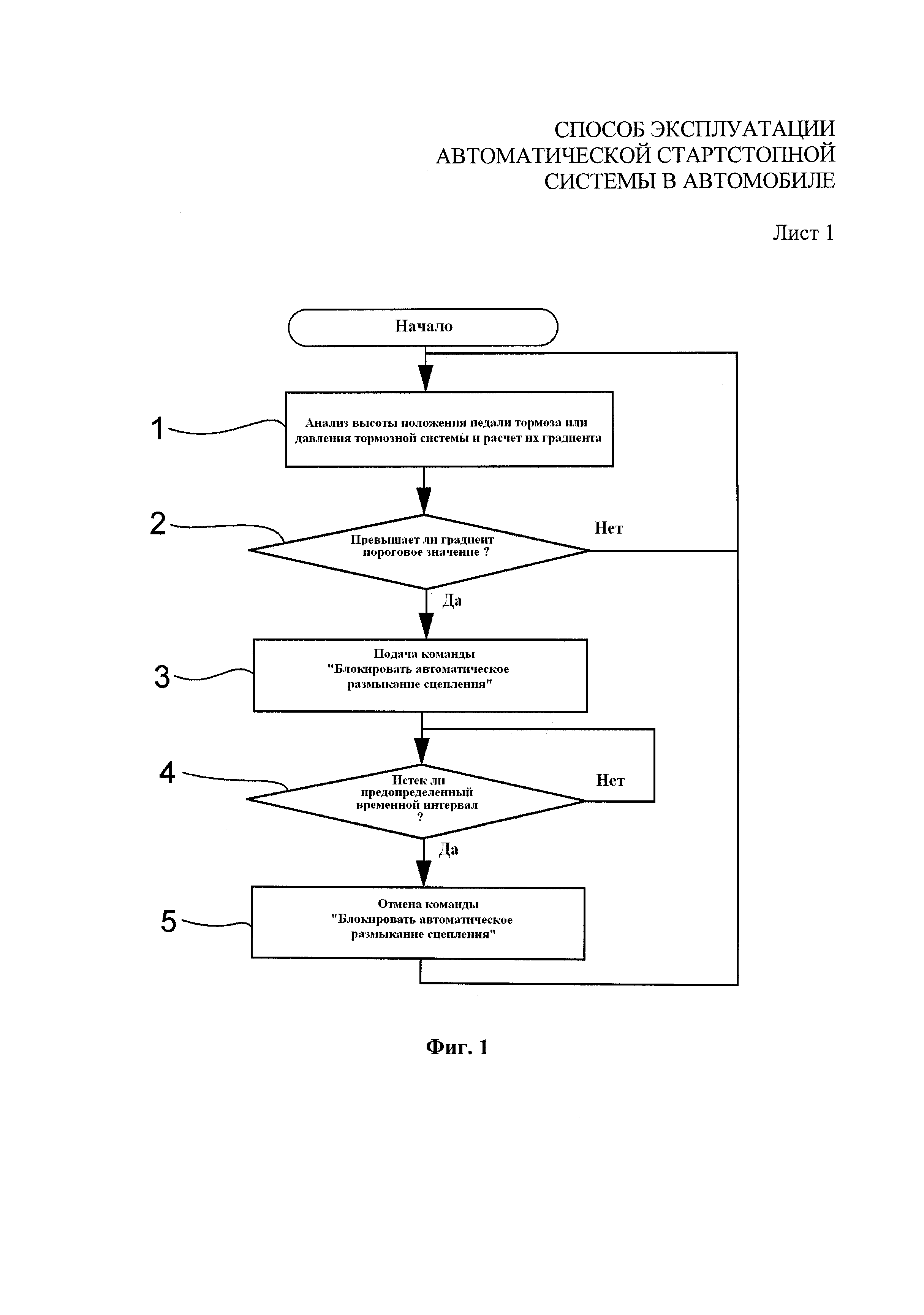
Далее следует описание варианта осуществления изобретения со ссылкой на Фиг. 1, на которой показана блок-схема, иллюстрирующая осуществление способа согласно изобретению.
Транспортное средство (не показан на Фиг. 1), содержащее двигатель (двигатель внутреннего сгорания) и автоматическое, в частности электрическое или электронное сцепление, включает в себя автоматическую стартстопную систему, которая, если нет необходимости движущей силы, размыкает сцепление и либо запускает двигатель на холостом ходу, либо отключает его.
Транспортное средство содержит электронное устройство управления двигателем и один или более бортовых компьютеров для осуществления множества функций, включая автоматическую стартстопную систему, а также множество датчиков, в том числе датчик угла поворота рулевого колеса и датчик высоты положения педали тормоза или давления тормозной системы.
Кроме того, транспортное средство может содержать систему помощи водителю или систему предотвращения столкновений, которые оценивают потенциал опасности текущей дорожной ситуации на основе сигналов дополнительных датчиков, например, датчиков расстояния, и/или на основе информации, получаемой системой от других транспортных средств по радио или через ИК-порт, и при необходимости предупреждают водителя об опасности и/или подготавливают систему безопасности к возможному срабатыванию, например, путем приведения в действие натяжителей ремней безопасности.
В состоянии, когда транспортное средство движется вперед без получения от водителя запроса необходимости движущей силы, возможная стратегия управления для автоматической стартстопной системы состоит в том, чтобы немедленно разомкнуть сцепление и перевести двигатель в режим холостого хода или выключить его совсем. Другая стратегия управления состоит в том, чтобы осуществлять все это только при явном желании водителя, например, потому что водитель переключается на холостой ход, или после определенной задержки, которая может зависеть от режима работы, например, от скорости движения или непосредственно от текущей передачи.
При использовании автоматической стартстопной системы анализируют текущую высоту положения педали тормоза или зависящее от нее давление тормозной системы, после чего рассчитывают градиент этой величины, т.е. временное изменение давления тормозной системы и/или высоты положения педали тормоза (этап 1 на Фиг. 1). На этапе 2 определяют, превышает ли этот градиент заданное пороговое значение. Если градиент не превышает заданного порогового значения, то повторяют выполнение этапов 1 и 2. Если градиент превышает заданное пороговое значение, на этапе 3 на устройство управления двигателем или бортовой компьютер, в котором происходит реализация автоматической стартстопной системы, происходит подача команды «Блокировать автоматическое размыкание сцепления». Одновременно на этапе 3 происходит запуск таймера, рассчитанный на заранее заданный временной интервал. На этапе 4 проверяется, истек ли этот заранее заданный временной интервал. Если заранее заданный временной интервал истек, на этапе 5 происходит отмена команды «Блокировать автоматическое размыкание сцепления», а способ возвращается на этап 1.
Если на этапе 2 градиент превышает заданное пороговое значение, это является признаком опасной ситуации, так как при внезапно возникающей опасной ситуации водитель часто резко нажимает на педаль тормоза. Блокировка автоматического размыкания сцепления предназначена для того, чтобы реакция водителя из-за внезапно возникшей опасной ситуации не усугубилась неправильной реакцией транспортного средства.
Как указано, команда «Блокировать автоматическое размыкание сцепления» блокирует автоматическое размыкание сцепления автоматической стартстопной системой, если сцепление уже находится в замкнутом состоянии. Также может быть заблокировано автоматическое замыкание сцепления заранее заданный временной интервал, если сцепление уже находится в разомкнутом состоянии. Таким образом, режим работы сцепления не изменяется. Если же транспортное средство движется по инерции или в режиме свободного качения, движение по инерции или в режиме свободного качения продолжается вне зависимости от обычной стратегии управления автоматической стартстопной системой, и если в течение заранее заданного временного интервала, в течение которого работает запущенный на этапе 3 таймер, необходимо переключение автоматической стартстопной системы из обычного режима работы двигателя в режим движения по инерции или в режим свободного качения, такое переключение также блокируется.
В дополнение к описанному выше способу может быть выполнена следующая последовательность операций, отличающаяся от описанной выше лишь тем, что на этапе 1 производится измерение и вычисление градиента не высоты положения педали тормоза или давления тормозной системы, а текущего угла поворота рулевого колеса, а на этапе 2 с заданным пороговым значением сравнивают значение градиента угла поворота рулевого колеса. Если величина этого градиента превышает заданное пороговое значение, это также является признаком опасной ситуации, так как в некоторых внезапно возникающих дорожных ситуациях водитель резко выкручивает рулевое колесо, например, чтобы избежать столкновения с объектом. Блокировка автоматического размыкания сцепления предназначена для того, чтобы реакция водителя из-за внезапно возникшей опасной ситуации не усугублялось неправильной реакцией транспортного средства.
В дополнение к описанному выше способу выполняется еще одна последовательность операций, отличающаяся от описанных выше лишь тем, что на этапе 1 происходит определение того, предпринимал ли водитель какие-либо действия, призванные предупредить других участников уличного движения об опасной ситуации, распознанной им (например, включил ли он систему аварийной сигнализации). При этом если на этапе 2 будет получен положительный ответ, то происходит переход на этап 3.
В дополнение к описанному выше способу выполняется еще одна последовательность операций, отличающаяся от описанных выше лишь тем, что на этапе 1 система помощи водителю или система предотвращения столкновений получает запрос, распознали ли эти системы опасную ситуацию. При этом если на этапе 2 будет получен положительный ответ, то происходит переход на этап 3.
Пороговое значение, используемое на этапе 2, и/или временной интервал, используемый на этапах 3 и 4, в течение которого работает таймер, не должны быть жестко заданы, а, наоборот, должны зависеть от типа исследуемых на этапе 1 критериев, а также от других важных критериев, например от текущей скорости движения.
Реферат
Изобретение относится стартстопной системе автомобиля. В способе эксплуатации стартстопной системы в транспортном средстве с автоматическим сцеплением, выдают, при работе стартстопной системы, команду на блокировку размыкания сцепления в ответ на то, что автоматическое сцепление является замкнутым и изменение давления тормозной системы во времени или изменение высоты положения педали тормоза во времени превышает пороговое значение. В другом варианте команду на блокировку выдают при изменении угла поворота рулевого колеса во времени, превышающем пороговое значение. В следующем варианте выдают, при работе стартстопной системы, команду на блокировку замыкания сцепления в ответ на то, что автоматическое сцепление является разомкнутым и изменение угла поворота рулевого колеса во времени превышает пороговое значение. Улучшается работа стартстопной системы с точки зрения безопасности. 3 н. и 3 з.п. ф-лы, 1 ил.
Комментарии