Способ и устройство для осуществления блокады периферического нерва - RU2738796C1
Код документа: RU2738796C1
Чертежи




Описание
Притязание на приоритет
[001] Настоящая заявка испрашивает приоритет по патентной заявке США №15/587,119, поданной 4 мая 2017 г. Эта заявка также испрашивает приоритет по предварительной заявке США №62/501,546, поданной 4 мая 2017 г. Описание каждой из вышеуказанных заявок включено в настоящий документ в полном объеме посредством ссылки.
Область техники
[002] Настоящее изобретение в общем относится к улучшениям в доставке лекарственных средств, а, в частности, к системам подкожной инъекции/аспирации. Более конкретно, изобретение обеспечивает способ и устройство для различения разных положений конца иглы при осуществлении блокады периферических нервов или продвижения любого медицинского устройства вблизи нерва, сплетения или нервного корешка.
Уровень техники
[003] Блокаду периферических нервов (БПН) используют для обезболивания, послеоперационного обезболивания, а также диагностики и лечения хронических болевых синдромов. Блокады периферических нервов могут также способствовать купированию острой боли и улучшать самочувствие пациента, даже при использовании только в качестве вспомогательных техник. Задача техники местной анестезии с БПН заключается в идентификации целевого нерва и положения полой иглы в определенной близости относительно целевого нерва без таких нежелательных последствий, как повреждение структуры нерва или причинения пациенту чрезмерной боли. Несмотря на все более частое использование ультразвукового исследования для способствования визуализации блокирующей иглы, целевых нервов и распространения анестезирующего средства местного действия, сообщается, что случаи интраневральной инъекции во время БПН с УЗИ происходят чаще, чем предполагалось ранее; даже компетентные специалисты не обнаруживают 1 из 6 случаев интраневрального расположения конца иглы до начала инъекции. Использование ультразвукового исследования не уменьшило частоту возникновения послеоперационных неврологических симптомов (ПОНС) по сравнению с направлением ориентированной стимуляцией нервов (СН). Сообщается, что до 19% пациентов на следующий день после процедур БПН испытывают такие неврологические симптомы, как парестезия или остаточная блокада, у приблизительно 3% пациентов они продолжаются на протяжении первых нескольких месяцев. Распространенность продолжительных (6-12 месяцев) ПОНС также составляет от 2 до 4 на 10000 процедур БПН.
[004] Со ссылкой на фиг. 1 предоставлено схематическое описание микроскопической анатомии периферической нервной системы. Одноклеточный блок, обычно именуемый аксоном, является базовым структурным элементом центральной и периферической нервной системы. Головной мозг и центральная нервная система состоят из миллионов аксонов. От центральной нервной системы ствола головного мозга и спинного мозга ответвляется совокупность высокоорганизованных аксонов, образующих сеть чувствительных и двигательных проводящих путей через аксоны. Данная сеть проводящих путей, начинающаяся от спинномозгового канала, в совокупности известна как периферическая нервная система.
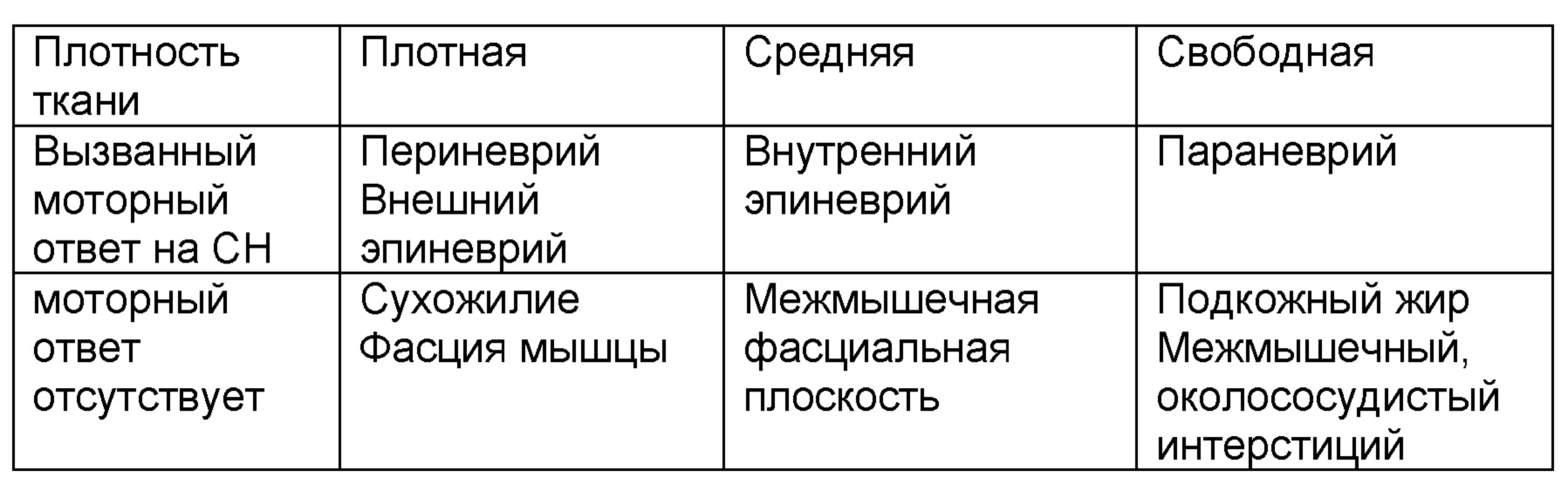
[005] Каждый отдельный аксон в периферической нервной системе окружен поддерживающей соединительной тканью, именуемой как эндоневрий. Внутри эндоневрия содержатся малые кровеносные сосуды (капилляры и венулы), обеспечивающие эти аксоны питательными веществами. Совокупность аксонов образует высокоорганизованные, плотно наполненные узлы, окруженные оболочкой тонкой, но плотной многослойной соединительной ткани, которая окружает и образует мембранную структуру, именуемую периневрием. Периневрий образует плотный защитный слой, который является физическим и химическим барьером, обеспечивающим определенную степень защиты аксонов и эндоневрия. Этот барьер подобен гематоэнцефалическому барьеру.
[006] Этот отдельный узел эндоневрия и периневрия именуют периферическим нервным пучком. При соединении пучки образуют узлы пучков внутри эпиневрия, который представляет собой соединительную ткань, иногда именуемую внутренним или межпучковым эпиневрием. Несколько групп пучков расположены в неоднородной матрице соединительной ткани (фиброзно-жировой ткани) и сосудов среднего размера, которые свободно совмещены друг с другом наружным периметром плотной соединительной ткани. Связанные пучковые структуры совместно окружены этим дополнительным плотным и более высокоорганизованным слоем фиброзной ткани, который размещает содержимое периферического нерва и известен как наружный эпиневрий.
[007] Наружный эпиневрий соединяет наружный слой со смежными структурами. Свободная соединительная ткань заполняет пространство между нервом и окружающей тканью, соединенной с наружным эпиневрием. Таким образом, за наружным эпиневрием находится дополнительная многослойная граница, проходящая вдоль всей траектории нерва, и состоит из экстраневральной соединительной ткани, известной как параневрий, (мезоневрий или скользящий аппарат). Параневрий представляет собой отдельную многослойную функциональную структуру, позволяющую нерву скользить относительно других анатомических структур во время мышечно-скелетных движений.
[008] Для способствования определению местоположения нервной ветви может быть использована электрическая стимуляция. Осуществление стимуляции тела электрическим током имеет свойство вызывать косвенное возбуждение чувствительных и двигательных компонентов нерва. Было обнаружено, что это обеспечивает видимое мышечное сокращение и электрическую парестезию при применении электрической стимуляции к двигательным и чувствительным аксонам, соответственно. Модуляция заряда тока (мощности и продолжительность) и частоты приводит к сокращению и расслаблению мышечных групп, иннервированных нервной ветвью. Однако эта практика использования косвенного электрического заряда для вызова нервной реакции конкретного нерва не получила широкого принятия в связи с несколькими недостатками, включая:
- Невозможность точной модуляции применяемого электрического заряда на данных расстояниях от поверхности нервной ветви ограничила возможности стимуляции нерва определять конкретную нервную ветвь при использовании стимуляции нерва в качестве главного средства определения расположения нервной ветви. На конкретных расстояниях при приближении к нервной ветви рекомендованы разные интенсивности заряда. Однако расстояние от конца иглы к нерву и мощность тока, отмечаемая видимой реакцией в виде мышечной судороги, не обязательно связаны между собой. Во время процедуры стимуляция нерва (СН) на более низкий электрический заряд не обязательно означает, что игла расположена ближе к поверхности, в экстраневральном положении или внутри нерва. Подобным образом, стимуляция нерва на более высокий заряд тока не обязательно означает нахождение иглы на большем расстоянии от целевой нервной ветви. Базовые принципы электрической локализации нерва - мощность тока пропорциональна расстоянию от иглы к нерву; было установлено, что привязка значений стимулирующего тока от 0,1 до 0.4 мА к расстояниям <2 мм является чрезмерными обобщениями. На проводимость, распространение и инициирование электрического тока моторного ответа влияют анатомические структуры, такие как расположение мышц, соединительных тканей и барьеров сопротивления вблизи иглы. Электрическая стимуляция нерва является способом косвенной локализации, а не точным руководством по расположению иглы. Однако моторный ответ при низком заряде тока является характерным для положения конца иглы рядом с узлом аксонов,
- Невозможность установки подходящего заряда тока для стимуляции нерва на определенном расстоянии от наружной поверхности пучка, т.е. экстрафасцикулярно. Использование заряда большого тока рядом с пучком или интрафасцикулярно вызывает большее беспокойство, так как это может вызывать сильную реакцию у пациента. В заключение, отсутствует возможность определить, какой подходящий заряд следует применить для конкретного расстояния от пучка и/или нерва. Контакт иглы с нервом или интраневральное размещение иглы часто не вызывает моторного ответа при заряде низкого тока (от 0,3 до 1 мА), причем отсутствие чувствительности подтверждено испытаниями на животных и людях. Однако известно, что вызванный моторный ответ (ВМО) для мощности тока ниже 0,2 мА, в частности, предупреждает об интраневральном положении иглы перед инъекцией. Кроме того, известно, что вызванный моторный ответ (ВМО) для мощности тока ниже 0,1 мА, в частности, предупреждает об интрафасцикулярном положении иглы перед инъекцией.
- Осложняющие переменные могут приводить к неточности техники использования стимуляции нерва. Это относящаяся к анатомии вариативность в пределах тела данного пациента, а также анатомические отличия между различными пациентами. Тело состоит из тканей различных типов, состоящих из воды и коллагена, жировой ткани (жир), мышц, текучих сред (кровь, лимфа и интерстициальная жидкость), кости, хряща и т.д. Каждый из этих типов ткани имеет разное сопротивление и/или проводимость заряда при применении электрического тока на данном расстоянии от целевого объекта. В результате, заряд тока, требуемый для стимуляции нерва или пучка, нелинейно изменяется с расстоянием, изменяется при инъекции текучих сред, в зависимости от плотности ткани и/или механического давления, прикладываемого концом иглы к фасции.
[009] Изменения заряда тока (мощности) и сопротивления ткани электрическому стимулу осложняют стандартизацию технологии для обеспечения точного расстояния от иглы к нерву и взаимодействие со слоями конкретного пучка, нерва и/или сплетения. Несмотря на это, было установлено, что вызванный моторный ответ при очень низком токе является в высокой степени характерным для интраневрального положения конца иглы.
[0010] Мониторинг давления инъекции (МДИ) имеет высокую чувствительность к обнаружению пикового давления, как только конец иглы сталкивается с плотной соединительной тканью. Однако МДИ не различает природу плотной соединительной ткани. Диапазон низкого давления является характерным для ткани низкой плотности, свободной соединительной ткани, такой как жир, интерстиций или мышца. Диапазон высокого давления является характерным для плотной соединительной ткани (фасция, сухожилие, нерв…), но профиль давления не является в высокой степени конкретным относительно типа ткани. Например, сухожилие и нерв имеют сходство на ультразвуковом изображении. Вдавливание поверхностного слоя сухожилия и нерва может обуславливать подобное высокое пиковое давление. Аналогично, МДИ не обеспечивает различение параневрального от экстраневрального интерстиция.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0011] Ультразвуковое исследование обеспечивает возможность одновременной визуализации целевого нерва, иглы, местного анестезирующего раствора и окружающих анатомических структур. Однако ультразвуковое исследование как единственный способ мониторинга может быть ненадежным для предотвращения неврологического повреждения. Стимуляция нерва имеет низкую чувствительность для различения относительного положения конца иглы к слоям нерва, но высокую точность определения близкого расположения нервной ткани. Мониторинг давления инъекции является чувствительным для определения высокого давления инъекции в плотных тканях, например, контакт иглы с нервом или интрафасцикулярная инъекция. Настоящее изобретение совмещает эти возможности мониторинга в комбинированный подход для уменьшения риска неврологических осложнений при осуществлении БПН.
[0012] Согласно одному аспекту настоящее изобретение сочетает чувствительность МДИ и конкретность СН для различения разных положений конца иглы во время блокады периферического нерва с целью обнаружения пункции нерва и избегания интраневральной инъекции. Наблюдение давления инъекции может осуществляться непрерывно во время процедуры направления иглы к нерву таким образом, чтобы усиливать электрическую стимуляцию при превышении давлением порога. Отсутствие или возникновение вызванного моторного ответа указывает на отсутствие или наличие нерва у конца иглы, соответственно. Возникновение скачка давления и низкой мощности при вызванном моторном ответе указывает на близкое нахождение нерва. Скачок давления и очень низкая мощность стимуляции с соответствующим вызванным моторным ответом указывает на пункцию нерва или интраневральное положение конца иглы.
[0013] В дополнительном аспекте настоящего изобретения обеспечен механизм для способствования определению нерва, уменьшения распространенности интраневральных инъекций и предотвращения инъекции в плотную соединительную ткань рядом с пучками или непосредственно в них. Дополнительно, в другом аспекте настоящего изобретения обеспечивается возможность использования измерения давления для различения плотных тканей (низкая податливость), таких как нервная (нервный пучок), от соединительных тканей (мышечная фасция).
[0014] Другой аспект настоящего изобретения представляет собой систему, в которой обеспечивается непрерывное вливание текучей среды с неизменным расходом для обеспечения возможности точного измерения гидравлического давления посредством встроенного датчика давления. Ионные свойства текучей среды влияют на передачу электрического заряда тока через ткани. Вводимый раствор может быть ионизированным (соляной или местный анестетик) или неионизированным (декстроза в воде). Раствор могут однородно подавать через одноразовый шприц и трубку на конец иглы для вызова стимуляции нерва. Ионный раствор уменьшает сопротивление так, чтобы обеспечивать возможность более эффективного распространения заряда электрического тока через ткани; напряжение меньше для одинаковой мощности тока (закон Ома) таким образом, чтобы стимулирующий ток был менее болезненным и чтобы уменьшать электрическое поле.
[0015] Дополнительной аспект настоящего изобретения представляет собой систему, обеспечивающую возможность улучшать ультразвуковую визуализацию на месте инъекции путем обеспечения увеличенного расхода текучей среды на подходящем месте расположения конца иглы. Увеличенный поток текучей среды обеспечивает возможность более простой идентификации конца иглы во время продвижения иглы через ткани при осуществлении блокады периферического нерва, таким образом способствуя предотвращению расположения конца иглы, в частности, в нерве.
[0016] Другой аспект настоящего изобретения заключается в регулировании электрической стимуляции на основании получаемых сигналов о давлении текучей среды в игле.
Краткое описание чертежей
[0017] Предшествующее краткое описание и следующее подробное описание предпочтительных вариантов реализации настоящего изобретения будут лучше всего понятны при прочтении в сочетании с прилагаемыми чертежами, на которых:
[0018] На фиг. 1 показан вид в поперечном разрезе пучка нервных волокон;
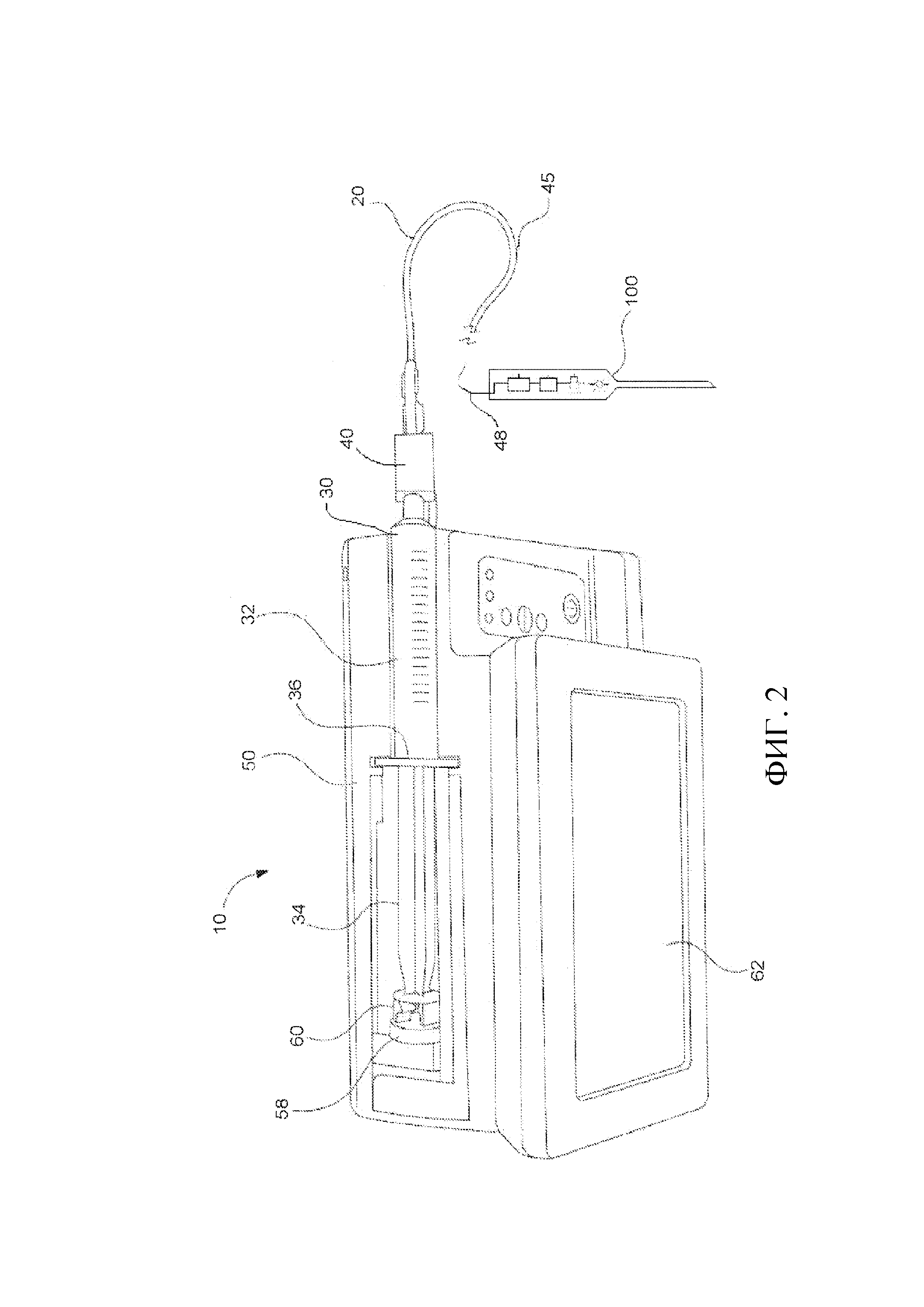
[0019] На фиг. 2 показан перспективный вид системы доставки лекарственного средства;
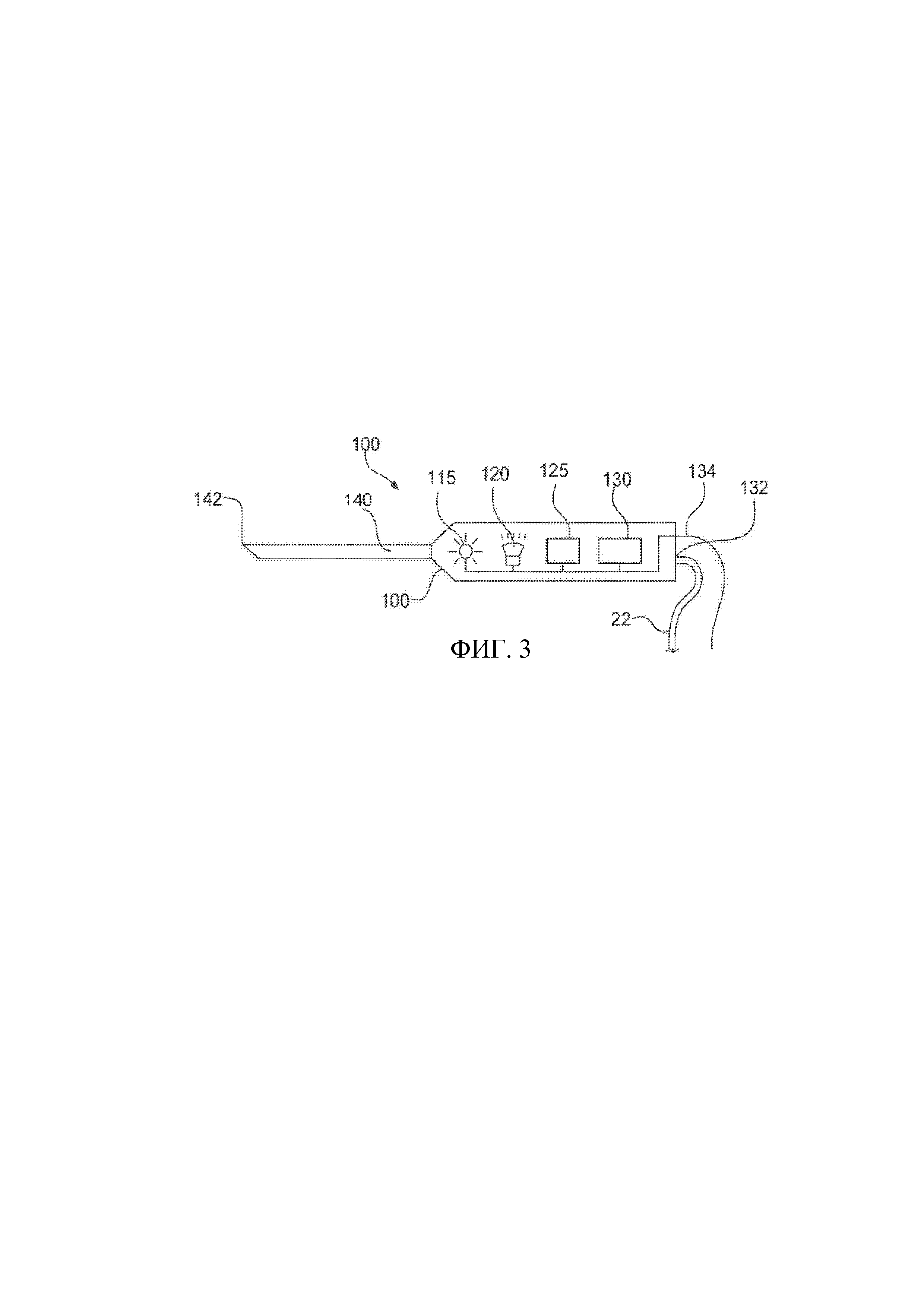
[0020] На фиг. 3 показан вид сбоку в увеличенном масштабе ручного блока системы доставки лекарственного средства, изображенной на фиг. 2;
[0021] На фиг. 4 показана диаграмма устройства для инъекций системы доставки лекарственного средства, изображенной на фиг. 2;
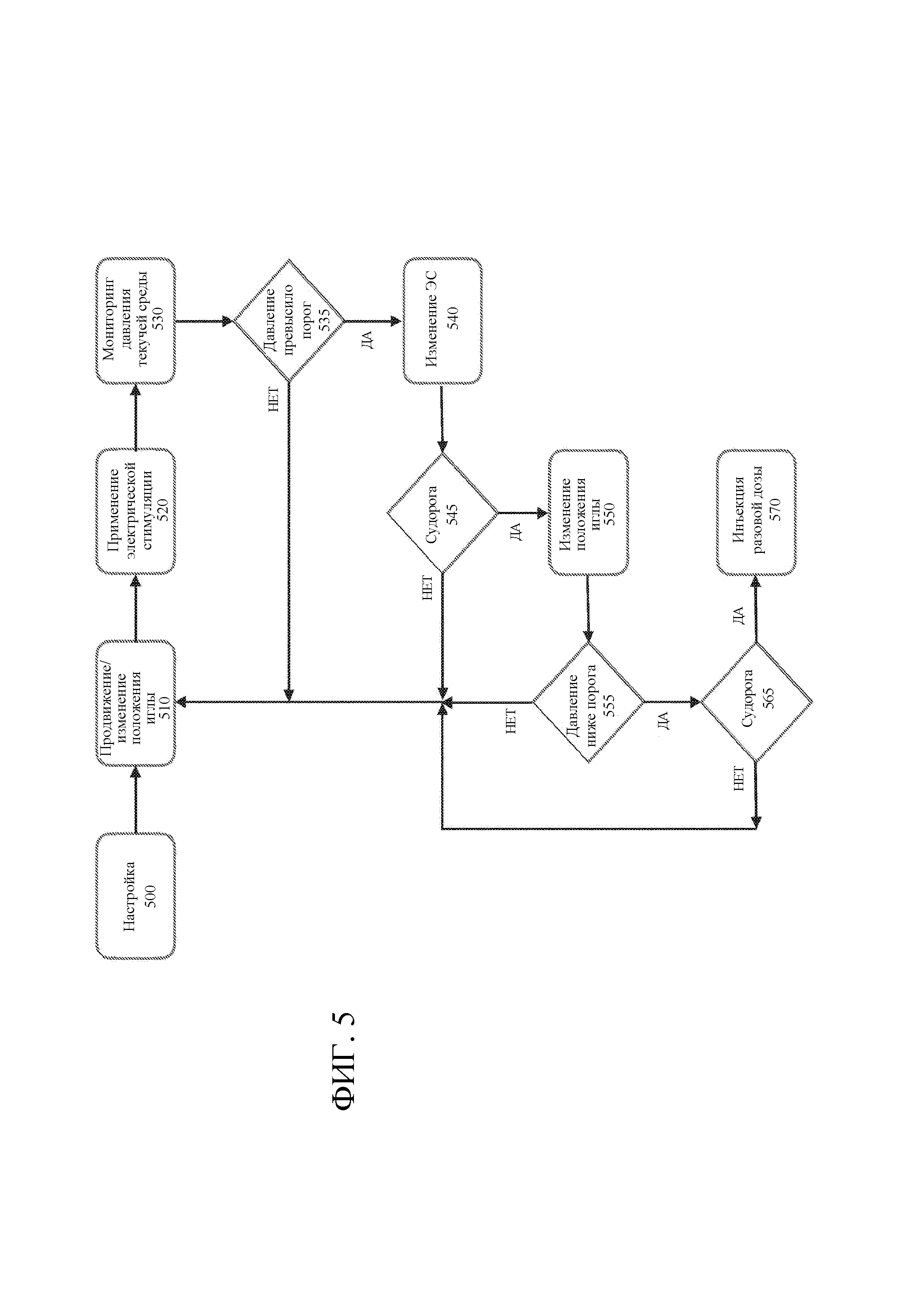
[0022] На фиг. 5 показана блок-схема способа введения текучей среды;
[0023] На фиг. 6 показана диаграмма альтернативного варианта реализации системы доставки лекарственного средства;
[0024] На фиг. 7 показана диаграмма целевого нерва; и
[0025] На фиг. 8 показана блок-схема альтернативного способа введения текучей среды.
Осуществление изобретения
[0026] С общей ссылкой на чертежи и, в частности, на фиг. 1-3, система вливания лекарственного средства в общем обозначена позицией 10. Система 10 содержит инъекционный узел 20 и приспособление 50 для доставки лекарственного средства с компьютерным управлением, именуемое приводным блоком. Инъекционный узел 20 содержит иглу 140 введения, выполненную для ввода в тело субъекта-млекопитающего. Инъекционный узел 20 соединен с приводным блоком 50, который регулирует поток текучей среды к инъекционному узлу во время эксплуатации. Система 10 также содержит один или более механизмов вывода, предоставляющих данные медицинскому специалисту во время процедуры для способствования надлежащему расположению иглы в теле пациента.
[0027] Система 10 выполнена с возможностью определения участка интрафасцикулярного расположения иглы. Система также выполнена с возможностью доставки терапевтического лекарственного средства к экстрафасцикулярному месту расположения иглы. Лекарственное средство может без ограничения включать местные анестезирующие растворы, такие как кортикостероиды, гидроксиапатит, лекарственные средства восполнения суставов, склерозирующие средства и другие лекарственные средства, обычно вводимые в пространство тканей, наполненное текучей средой, в терапевтических целях. Система также выполнена с возможностью измерения гидростатического давления в отделе ткани, такой как мышца, или в интерстицие.
[0028] Интрафасцикулярное расположение иглы представляет собой такое расположение, при котором конец иглы проникает через периневрий так, что конец иглы расположен внутри пучка. Экстрафасцикулярное расположение иглы представляет собой положение, в котором игла находится где угодно за пределами периневрия отдельного пучка, что может включать внутри эпиневрия или параневрия, и таким образом определяется как полностью экстраневральное расположение или расположение в окружающих структурах нерва.
[0029] Проникновение конца иглы в пучок и последующие изменения в нервных и сосудистых тканях внутри пучка, вызванные текучей средой под гидростатическим давлением, могут приводить к необратимому повреждению нерва. Это происходит, так как наружный слой пучка является защитным слоем, имеющим относительно неподатливую, жесткую защитную структуру. Это защищает базовые компоненты нерва, аксоны, которые плотно наполняют пучок. Другими словами, пучок представляет собой плотно наполненную конфигурацию с толстой защитной оболочкой. Пучку не свойственна быстрая деформация путем расширения или сокращения. Следовательно, податливость ткани к поступающему потоку текучих сред является крайне низкой и/или полностью отсутствует. Проникновение иглы в пучок не обязательно влечет за собой максимальное повреждение узлов аксонов, но суммарный результат проникновения иглы и повышенное давление внутри пучка вследствие вливания текучих сред внутрь пучка может повреждать капиллярное ложе. Дополнительно, ущемление микроциркуляции аксонов, вызванное давлением текучей среды, препятствует кратковременному восполнению питательных веществ после такой физической травмы, что впоследствии приводит к начальной стадии некроза. Каскад от некроза приводит к воспалительной реакции в попытке инициировать заживление раны от изначальной травмы, нанесенной давлением, которая далее потенциально усугубляется или каскадирует к необратимому поражению.
[0030] Однако есть случаи, в которых умышленное интрафасцикулярное расположение иглы является желательным и требуемым. Такие случаи включают недиагностируемую фантомную боль после ампутации конечности. Дополнительно, сверхактивная нервная стимуляция конкретной конечности иногда приводит к устранимой боли и является еще одной ситуацией, в которой требуется умышленное интрафасцикулярное расположение иглы и доставка веществ. Соответственно, система 10 и ее использование могут обеспечивать альтернативный способ и устройство для различения между экстрафасцикулярным и интрафасцикулярным расположением иглы.
[0031] Введенная текучая среда распространяется через ткань с разной скоростью. В результате варьируется давление текучей среды. Следовательно, это давление текучей среды (или внутреннее давление, относящееся к давлению сопротивления ткани), указывает на несколько типов плотностей тканей или может быть использовано для их идентификации.
[0032] Также есть случаи, в которых лечащему врачу требуется ввести лекарственное средство в плотные ткани, такие как мышечная фасция, сухожилие или другая ткань тела, которая подлежит идентификации как ткань, не содержащая нервных тканей.
[0033] Система 10 позволяет лечащему врачу точно идентифицировать пространство, наполненное текучей средой, при этом ограничивая проникновение лекарственных средств в нецелевые ткани. Это осуществляют для диагностических и терапевтических процедур. Система 10 использует давление текучей среды при ее протекании от иглы или катетера после размещения иглы/катетера внутри ткани для идентификации точности размещения и для мониторинга размещения во время инъекции или аспирации. Система 10 может использовать непрерывный поток текучей среды с расходом, который считается низким, который определен как постоянный расход от 0,01 мл/с до 0,20 мл/с. Непрерывный поток текучей среды поддерживает постоянную колонну текучей среды, которая может обеспечивать по существу мгновенное время реакции на изменения давления внутри тканей, подлежащих обнаружению.
[0034] В частности, система 10 содержит один или более механизмов вывода для обеспечения звуковой и/или визуальной обратной связи обнаруженного давления текучей среды во вводной игле. Оператор использует обратную связь в качестве указания во время размещения вводной иглы. Как показано на фиг. 2, первый механизм вывода может представлять собой экран видеодисплея, такой как ЖК-дисплей, для отображения данных с целью содействия оператору. Дополнительно, также может быть обеспечен второй механизм вывода. Например, второй механизм вывода может представлять собой громкоговоритель для обеспечения выходного сигнала.
Инъекционный узел
[0035] Со ссылкой на фиг. 2 система 10 содержит инъекционный узел 20, выполненный с возможностью взаимодействия с приводным блоком 50 во время процедуры вливания лекарственного средства. Инъекционный узел содержит шприц 30, ручной блок 100, линию 45 текучей среды, соединяющую шприц с ручным блоком, и кабель 48, обеспечивающий электрическое соединение между ручным блоком и приводным блоком 50. Узел дополнительно содержит иглу 140, разъемно соединенную с ручным блоком 100.
[0036] Различные элементы инъекционного узла, такие как шприц 30, линия 45 текучей среды, ручной блок 100 и/или игла 140, могут быть одноразовыми. Альтернативно, элементы могут быть выполнены с возможностью повторного использования. Соответственно, различные элементы инъекционного узла выполнены с возможностью разъемного присоединения. Например, линия 45 текучей среды может содержать соединитель текучей среды на каждом конце. Герметичные соединители могут являться любой из разновидностей соединителей. Один приведенный в качестве примера соединитель представляет собой соединитель типа «Люер» или «NRFit» для регионарной анестезии. На первом конце соединитель текучих сред герметично соединен со шприцем, а на втором конце линия текучей среды герметично соединена с ручным блоком 100. Альтернативно, линия 45 текучей среды может быть жестко соединена с задним концом ручного блока 100. В любом из этих вариантов реализации ручной блок 100 и шприц сообщаются по текучей среде для обеспечения потока текучей среды от шприца к ручному блоку. Альтернативно, другой соединитель добавлен вдоль линии текучей среды; этот соединитель может быть использован для подачи текучей среды от другого шприца, соединенного с трубкой и однонаправленным клапаном, и выполнен с возможностью ручного управления для введения текучей среды, такой как местный анестетик. В частности, вспомогательный шприц, наполненный терапевтическим средством, может быть введен после идентификации целевого расположения или на протяжении всей процедуры.
[0037] Шприц 30 может являться любым из различных шприцев для подкожных инъекций, а длина и толщина могут варьироваться в зависимости от целевого использования. Шприц 30 содержит цилиндр 32 для удержания объема лекарственного средства и поршень 34, выполненный с возможностью скольжения внутри цилиндра для нагнетания текучей среды в цилиндр или вытеснения текучей среды из него. Шприц 30 предпочтительно также содержит упоры 36, выступающие по направлению наружу от цилиндра. Упоры функционируют как упоры для пальцев для способствования смещения поршня в цилиндр.
[0038] Инъекционный узел 20 также содержит датчик 40 давления для определения давления текучей среды в инъекционном узле. Датчик давления может быть расположен в одном из нескольких участков для измерения давления, соответствующего давлению текучей среды на конце иглы 140. Альтернативно, вместо или в дополнение к встроенному датчику давления (in-line pressure sensor), датчик давления может быть датчиком силы, расположенным внутри пластины для большого пальца или соединенным с ней, которая приводит в действие поршень 58 шприца, или датчиком силы, расположенным внутри приводного блока 50 и измеряющим силу, прикладываемую к поршню шприца. Такой датчик силы определяет силу, требуемую для введения текучей среды, которая связана с давлением текучей среды в игле. Использование такого датчика обеспечивает преобразование обнаруженной силы в значение давления путем вычисления, осуществляемого процессором. В настоящем случае датчик 30 давления является датчиком внутреннего давления текучей среды, присоединенным к шприцу 30 между шприцем и трубкой 45. Таким образом, датчик 40 давления обнаруживает давление текучей среды при выходе текучей среды из шприца и проникновении в трубку 45, к которой присоединена игла 140. Подобным образом, встроенный датчик давления может быть расположен между трубкой и иглой.
[0039] Инъекционная система 10 может также содержать ручной блок 100 повторного использования, к которому присоединена игла 140. Как показано на фиг. 2, вводная игла 140 соединена с передним концом ручного блока, а трубка 45 соединена с задним концом ручного блока. Ручной блок 100 может быть выполнен с возможностью обеспечения электрической стимуляции, как более подробно описано ниже.
[0040] Инъекционным узлом 20 могут управлять вручную для введения текучей среды. Однако в настоящем примере система 50 доставки лекарственного средства с компьютерным управлением регулирует поток текучей среды от инъекционного узла, как более подробно описано ниже. Электрический кабель 48 соединяет датчик 40 давления с системой 50 доставки лекарственного средства так, чтобы обеспечивать возможность мониторинга и, при желании, изменения потока текучей среды от шприца системой доставки лекарственного средства в ответ на данные от датчика 40 давления. Преобразователь 40 давления может быть соединен внутри между передним концом цилиндра шприца 30 и первым концом трубки 45. Одно приведенное в качестве примера соединение представляет собой соединение типа «Люер» для соединения преобразователя 40 давления с концом шприца. Соединение может быть прикреплено посредством резьбового соединения и/или необратимого резьбового соединения, такого как фиксатор иглы «LuerLock» или такого как «NRFit» для регионарной анестезии. Альтернативно, преобразователь 40 давления может быть неразъемно прикреплен к шприцу путем сварки пластмасс или химического связывания, например, клеящее вещество. Таким образом, обеспечивается обнаружение одномоментного действительного давления текучей среды в линии 45 доставки лекарственного средства и его использование приспособлением, таким образом предоставляя хорошее приближение к действительному одномоментному давлению текучей среды на вершине или конце иглы 140, и, следовательно, на участке в теле пациента, где расположен конец иглы. Электронный преобразователь 40 давления обеспечивает данные о давлении через кабель электронных данных, соединенный непосредственно с центральным блоком 50 для сбора измерений давления.
[0041] Электронный преобразователь 40 давления может являться любым из различных датчиков давления. Один тип приведенного в качестве примера датчика представляет собой пьезоэлектрический датчик давления, такой как датчики, коммерчески доступные от компании Merit Medical Systems, Inc., такие как преобразователь давления Meritrans®, номер позиции MER212.
Автоматическая система доставки текучей среды
[0042] Как описано выше, система 10 может содержать систему 50 доставки текучей среды для обеспечения регулируемого потока лекарственного средства к инъекционному узлу 10. Предпочтительно, система доставки текучей среды представляет собой автоматическую систему, а в настоящем случае представляет собой систему доставки текучей среды с компьютерным управлением, именуемую как приводной блок 50.
[0043] Со ссылкой на фиг. 2 и 4, приводной блок 50 выполнен с возможностью функционирования в сочетании с инъекционным элементом, таким как шприц 30. Приводной блок 50 может содержать подставку, выполненную с возможностью приема шприца 30, и зажим для удержания шприца в подставке. Приводной блок 50 содержит приводной элемент 58, выполненный с возможностью приведения в действие поршня в шприце для выталкивания текучей среды из шприца. Приводной блок 50 регулирует смещение приводного элемента 58, таким образом регулируя выпуск текучей среды из шприца. В настоящем случае приводной элемент может содержать двигатель 70, приводящий в действие рычаг 58, имеющий зажим с множеством пальцев, выполненных с возможностью зацепления с поршнем 34 с возможностью высвобождения. Движение двигателя в первом направлении обеспечивает движение рычага 58 по направлению вперед для продвижения поршня 34, таким образом выталкивая текучую среду. ЦПУ 82 приводного блока подает сигналы на двигатель для управления работой двигателя.
[0044] Приводной блок 50 выполнен с возможностью обеспечения постоянного или переменного потока текучей среды. В настоящем случае приводной блок может обеспечивать непрерывную текучую среду в ответ на сигналы, полученные от электронного преобразователя 40 давления, который непрерывно считывает давление текучей среды во время процедуры введения/инъекции. На основании заранее заданного давления приводной блок 50 может останавливать поток текучей среды при превышении заранее определенного порога обнаруженным давлением. Заранее определенный порог может быть установлен лечащим врачом и сохранен на запоминающем устройстве 80 микропроцессора или компьютера 82 электронных устройств в приводном блоке 50. Подобным образом, на основании заранее определенного давления, поток текучей среды будет возобновлен при падении давления текучей среды ниже заранее определенного давления и будет продолжать протекать до тех пор, пока давление остается ниже порога. Это же заранее определенное давление может быть использовано для управления остановкой и повторным запуском потока текучей среды. В этом случае при изначальном проникновении текучей среды в ткани, давление будет нарастать до заранее определенного уровня, а затем остановится до повторного падения давления ниже этого заранее определенного уровня. При падении давления текучей среды ниже заранее определенного уровня, поток текучей среды будет возобновлен, и его будут поддерживать непрерывным. Таким образом, поток текучей среды может быть запущен и остановлен во время процедуры, создавая прерывание потока текучей среды после обнаружения конкретного заранее определенного давления.
[0045] Система может содержать заранее определенные пороговые уровни давления, используемые для регулирования потока лекарственного средства из шприца 30 во время процедуры. Это позволяет клиническому врачу избирательно вводить лекарственные средства в конкретные участки и целевые ткани для диагностических и терапевтических процедур. Заранее выбранные максимально допустимые пределы давления и/или расходы хранят на запоминающем устройстве 80 и определяют максимальные рекомендуемые давления, обычно переносимые пациентами, или другие критерии. При приближении давления к пределу, для клинического врача генерируется визуальное и/или звуковое предупреждение, т.е. на экране 62 и через громкоговоритель 84, активируемое данными от микропроцессора 82. Дополнительно, данные, описывающие весь процесс инъекции, хранят на запоминающем устройстве 80 для дальнейшего анализа.
[0046] Система 10 может непосредственно измерять давление текучей среды в инъекционном узле 10, или система может измерять характеристику, указывающую на давление текучей среды в инъекционном узле. Например, давление может быть измерено путем обнаружения сопротивления давлению, измеренного во время вливания. Измеренное сопротивление давлению непрерывно преобразуют в визуальный сигнал во время процедуры введения. Расход лекарственного средства во время процедуры может быть основан на давлении текучей среды, обнаруженном в реальном времени во время процедуры. Следовательно, расход лекарственного средства может варьироваться и может зависеть от давления в системе. Таким образом, давление текучей среды может быть главной регулируемой переменной системы.
[0047] Один признак настоящей системы заключается в возможности обнаружения мельчайших изменений в давлении на конце иглы при расположении иглы внутри ткани пациента. Возможность обнаружения незначительных изменений давления основана на постоянном движении текучей среды в ткани при регулируемых условиях, таким образом позволяя идентифицировать участки на основании давления внутри ткани и/или избегать их. Система обнаруживает эти мельчайшие изменения в давлении в реальном времени и в динамике при использовании непрерывного потока текучей среды. Непрерывный поток координируют с заранее определенным максимальным давлением, используемым системой для остановки потока текучей среды на заранее определенном пределе давления для предотвращения повреждения этих тканей. В случае постоянного потока текучей среды, давление напора обеспечивает требуемое сопротивление внутри тканей для обеспечения возможности по существу мгновенного обнаружения незначительных изменений в плотности и податливости ткани.
[0048] Следовательно, расход становится второй переменной, которую модулируют в пределах заранее определенного диапазона для поддержания желаемого потока текучей среды. В одном конкретном варианте реализации поток текучей среды останавливают при превышении давлением заранее определенного порога (максимального давления). Расход как вторая переменная может быть ограничен так, чтобы исключать чрезмерно высокую скорость инъекции текучей среды в условиях низкого давления. Предусмотрено, что взаимосвязь между давлением и расходом текучей среды может быть бинарной или непрерывной. Бинарная взаимосвязь имеет место при настройке инъекционного устройства для доставки текучей среды с одним заранее определенным расходом для любого давления, меньше заранее установленного максимума. Таким образом, поток текучей среды обеспечивается или прекращается на основании того, превышен ли порог давлением. Альтернативно, расход может быть модулирован как функция давления. В этом случае, расход будет уменьшен при приближении к максимальному давлению и увеличен при падении давления. При необходимости расход может быть ограничен первым заранее заданным максимальным давлением, и расход возобновляется на втором отдельном заранее определенном давлении.
[0049] Как указано выше, система 10 может содержать механизм для отображения данных, относящихся к инъекции, включая, например, одномоментные значения расхода, давления и объема инъекции, на экране 62 приводного блока 50. Дополнительно к визуальной обратной связи, система может содержать элемент предоставления звуковой обратной связи оператору. Например, система может содержать преобразователь, обеспечивающий звуковую обратную связь так, что звуковой сигнал изменяется при изменении давления. Кроме этого, система может содержать элемент для обеспечения звукового оповещения или сигнала индикации при превышении давлением конкретных заранее определенных уровней. Система может также содержать механизм для записи данных, относящихся к инъекции, для последующего анализа после осуществления процедуры. Например, система может содержать энергонезависимый электронный носитель данных, такой как жесткий диск, флэш-память, оптический накопитель или другой носитель для хранения электронных данных, и может включать сетевое подключение для обеспечения возможности подключения к больничной или офисной компьютерной системе для сохранения в профиле пациента в реальном времени. Таким образом, система может обеспечивать возможность автоматической и эффективной передачи данных, генерируемых из инъекции БПН.
[0050] Все измерения и информация могут предоставляться клиническому врачу в «реальном времени» так, чтобы клинический врач мог определять, осуществляется ли инъекция в целевой участок и/или надлежащие ткани, и мог корректировать процедуру инъекции соответствующим образом. Дополнительно, измерения могут быть записаны для последующего изучения и документации клинического случая.
[0051] Предусмотрено, что несколько шприцев, приводимых в действие отдельными поршнями шприцев, могут быть использованы для обеспечения возможности инъекции нескольких лекарственных средств, а также второй привод шприца, который не требует достижения заранее определенного давления для любой указанной цели. Второй привод может быть запрограммирован на конкретный расход для обеспечения возможности вливания лекарственного средства, такого как местный анестетик, и других терапевтических средств в разнообразные ткани.
[0052] В еще одном варианте реализации устройство может содержать два отдельных привода шприца, оба из которых выполнены с возможностью модуляции на основании давления текучей среды, как описано выше в настоящем документе.
Электрическая стимуляция
[0053] Система может также содержать элемент электрической стимуляции для подачи электрического стимула нерва на целевую ткань в теле пациента. Элемент электрической стимуляции представляет собой проводящий элемент, соединенный с ручным блоком 100 или изолированной иглой, используемой для блокады периферического нерва. Элемент электрической стимуляции выполнен с возможностью подачи электрического заряда низкой мощности (т.е. приблизительно от 0,10 мА до приблизительно 6,0 мА), короткой продолжительности (т.е. импульсы приблизительно от 0,05 до 1 мс) и с частотой от 1, 2 до 4 Герц, и максимальным напряжением (100 вольт). Элементы электронной стимуляции подают стимулы на протяжении короткого промежутка времени (т.е. приблизительно 1-10 секунд) с постоянным, нарастающим или убывающим зарядом тока.
[0054] Электрический стимулятор может являться внешним элементом или внутренним элементом. Например, на фиг. 2-4 показан вариант реализации, использующий внешние электрические стимулы. Проводящий элемент, такой как электропроводящий кабель 48, соединяет ручной блок 100 и генератор 85 стимулов друг с другом таким образом, чтобы обеспечивать передачу электрических стимулов на ручной блок от генератора стимулов. В свою очередь, ручной блок соединен с элементом, выполненным с возможностью доставки электрического заряда к ткани. Например, игла 140 может быть выполнена из электропроводящего материала, а ручной блок может содержать соединение с иглой, образующее электрический канал от проводящего элемента 48 к игле. Альтернативно, проводящий элемент, такой как провод, может проходить вдоль длины иглы, а игла может быть электрически изолирована от иглы. Например, покрытие иглы может быть выполнено из электрически изолирующего материала. Примером наружного элемента электрической стимуляции является изолированная игла, реализуемая под торговым названием «Stimuplex ®» или также катетер игольчатый катетер, реализуемый под торговым названием «Contiplex ® С» компанией В. Braun Medical Inc., Бетлехем, штат Пенсильвания.
[0055] Система может использовать внутренние электрические стимулы вместо внешних электрических стимулов, описанных выше. Например, текучая среда, вводимая из шприца, может быть ионным раствором, выполненным с возможностью проведения электрических стимулов. Проводящий элемент может быть взаимосоединен с текучей средой внутри изолированной иглы. Игла может быть выполнена из разнообразных непроводящих материалов. Например, проводящий элемент может выступать в путь текучей среды на определенной точке между шприцем 30 и иглой 140. Например, проводящий элемент может передавать электрические стимулы в текучую среду на заднем конце ручного блока 100. В случае передачи электрических стимулов на ткань через текучую среду, игла 140 может быть электрически изолирована для уменьшения какой-либо утечки или выброса электрического заряда через боковые стенки иглы.
[0056] Как показано на фиг. 2 и 4, элемент электрической стимуляции соединен с генератором 85 электрических стимулов, который представляет собой электрический источник, выполненный с возможностью подачи электрического заряда или импульса на элемент стимуляции. Генератор стимулов может быть встроен в приводной блок 50, как показано на фиг. 4. В такой конфигурации генератор 85 стимулов соединен с ЦПУ приводного блока таким образом, что ЦПУ подает электрические сигналы для управления работой генератора стимулов. Альтернативно, генератор стимулов может представлять собой отдельный элемент, имеющий отдельный источник электропитания и отдельное управление.
[0057] Вызванный электрический моторный ответ (ВМО) может быть визуально оценен оператором или обнаружен акцелерометрией, электромиограммой или любым другим способом мониторинга стимуляции нерва и/или сокращения мышцы, что приводит к регулированию стимуляции нерва и/или расхода и/или предупреждающим сигналам.
Вычисление давления текучей среды на выходе из иглы
[0058] Как описано выше, давление текучей среды может быть использовано для управления работой системы 10. Например, система может предоставлять сигнал оператору при превышении давлением текучей среды порога, таким образом указывая на возможное интрафасцикулярное расположение иглы или на ее вдавливание в наружный эпиневрий нерва. Существует несколько методологий вычисления давления текучей среды на выходе из иглы.
[0059] Датчик давления может обнаруживать давление текучей среды в инъекционном узле 100. Например, как описано выше, датчик давления может представлять собой встроенный датчик давления, такой как деталь №0001, доступная от компании «Merit Medical». Альтернативно, датчик давления, расположенный внутри приводного блока 50, может обнаруживать давление текучей среды между шприцем 30 и трубкой 45. Подобным образом, датчик давления может быть расположен между трубкой 45 шприца и иглой 140. Дополнительно, указанный встроенный датчик может быть встроен в рукоятку 100 или между трубкой 45 и рукояткой 100. Другая альтернатива заключается в использовании датчика силы на упоре для большого пальца для обнаружения силы, приводящей в действие поршень 34, для вычисления давления внутри шприца 30. Сигнал управления от датчика давления направляет данные о давлении на ЦПУ для вычисления с целью определения давления на выходе. Значение давления на выходе используют для управления двигателем 70, регулирующим поток текучей среды из шприца 30.
Ручной блок
[0060] Со ссылкой на фиг. 3 ручной блок 100 содержит полый корпус 110 и продолговатую полую иглу 140, выступающую по направлению вперед из корпуса. Обеспечен соединитель 132 для соединения ручного блока с линией 45 текучей среды инъекционного узла 10. В частности, соединитель 132 образует герметичное уплотнение для соединения ручного блока 100 на заднем конце корпуса для способствования соединению ручного блока и текучей среды в шприце. Текучая среда протекает к ручному блоку и из него через иглу 140. Как указано выше, встроенный датчик давления или подобный элемент для обнаружения характеристики, выражающей давление текучей среды, может быть встроен в ручной блок 100.
[0061] Ручной блок 100 может дополнительно содержать индикаторную лампу 215, выполненную с возможностью предоставления подсказок оператору. Индикаторная лампа 115 может являться светодиодом или другим световым элементом, образующим предупредительную лампу или индикаторную лампу в зависимости от применения. Ручной блок может дополнительно содержать звуковой индикатор 120, такой как пьезоэлектрический звуковой индикатор для обеспечения звукового сигнала, включая жужжащий звук, тональный сигнал или мелодию.
[0062] Дополнительно, ручной блок может быть оснащен кнопкой 125 управления. Кнопка 125 управления может функционировать как кнопка включения/выключения. Однако кнопка управления может также быть выполнена с возможностью ввода различных команд управления. Например, кнопка 125 управления может быть выполнена с возможностью ручной коррекции одной или более операций приводного блока 50, как более подробно описано ниже. В заключение, ручной блок 100 может дополнительно содержать механизм вывода, такой как дисплейный экран 130 для отображения различной информации, такой как обнаруженное давление текучей среды.
[0063] Как описано выше, ручной блок 100 может содержать как визуальный, так и звуковой индикатор 115, 120. Следует понимать, что наличие звукового и визуального индикатора в ручном блоке не является обязательным; он может содержать только один индикатор. Дополнительно, хотя описаны визуальный и звуковой индикатор, вместо них может быть использовано широкое разнообразие альтернативных индикаторов, например, вибрационный элемент, обеспечивающий регулярные индикаторные вибрационные сигналы. Кроме того, наличие каких-либо из этих индикаторов в ручном блоке 100 не требуется. Дополнительно, звуковой или визуальный индикаторы могут быть расположены на приводном блоке 50, а не на ручном блоке.
[0064] Как указаны выше, ручной блок 100 может содержать кнопку управления. Кнопка управления может быть использована, когда продвижение иглы не происходит. В таком случае, нажатие кнопки обеспечивает подачу сигнала управления на приводной блок 50 таким образом, что значение давления, противоположного давлению напора, не будет вычтено из вычисления давления на выходе (так как отсутствие продвижения иглы представляет собой нулевое или по существу нулевое давление, противоположное давлению напора). Следует понимать, что кнопка или контроллер на ручном блоке 100 может быть также активирован для соответствия движениям по направлению вперед, в которых давление, противоположное давлению напора, вычитают из вычисления давления напора, следовательно, обеспечивая средство различения между продвижением иглы и ее нахождением в статическом положении внутри тканей. Таким образом, приведение кнопки 125 в действие во время периодов минимального или нулевого введения иглы повышает точность значений давления на выходе внутри тканей во время процедуры. В дополнение к переключателю или кнопке управления, описанным выше, ручной блок может содержать вторую кнопку или элемент управления, в котором движения по направлению назад добавляют дополнительное значение давление напора для компенсации движения по направлению назад, что обеспечивает уменьшение значений давления на выходе при перемещении иглы назад через ткани.
[0065] В предшествующем описании игла установлена на ручном блоке, который может иметь дополнительные признаки. Однако следует понимать, что игла может быть расположена на различных элементах. Например, система может быть использована с вариантом реализации, в котором игла соединена с комплектом трубок. В таких вариантах реализации, оператор может регулировать мощность электрического заряда посредством контроллера, выполненного с возможностью управления независимо от ручного блока, например контроллером на блоке 50 управления.
Управление системой
[0066] Система содержит управляемый пользователем механизм ввода, позволяющий оператору направлять сигналы ввода для управления системой. Механизм ввода может быть любым из различных устройств, таких как ручной блок 100 или контроллер с ножным управлением, который предоставляет оператору средства для начала, остановки и изменения расхода от одного расхода ко второму или третьему отдельному заранее установленному расходу. Альтернативно, элемент ввода может являться кнопкой, сенсорным экраном, манипулятором типа «мышь», клавиатурой или микрофоном для предоставления звуковых команд ввода. Дополнительно, система может содержать множество механизмов ввода, позволяя оператору вводить разнообразные вводы для различных этапов процедуры. Например, система может содержать первый механизм ввода, такой как ножная педаль или дистанционный привод, регулирующий поток текучей среды через устройство. Предусмотрено, что устройство дистанционного управления может быть прикреплено к ультразвуковому преобразователю, таким образом позволяя оператору управлять инструментами одной рукой. Приведение в действие ручного устройства дистанционного управления или ножного педального переключателя (т.е. нажатие на переключатель) отправляет сигнал на ЦПУ приводного блока, который в свою очередь отправляет сигнал на двигатель для приведения двигателя в действие таким образом, чтобы обеспечивать протекание текучей среды от шприца к игле 140 в течение всего времени, пока инструмент приведен в действие. Альтернативно, первое приведение в действие ручного устройства дистанционного управления или ножной педали может обеспечивать сигнал пуска для запуска потока текучей среды, и текучая среда может продолжать протекать до повторного приведения ножной педали в действие оператором. Таким образом, второе приведение в действие функционирует как сигнал остановки для прекращения потока текучей среды. Дополнительно, система может содержать второй механизм ввода, такой как сенсорный экран, таким образом, чтобы после применения электронной стимуляции к пациенту, оператор мог вводить индикатор того, была ли обнаружена мышечная судорога или испытал ли пациент определенное ощущение. Приведение в действие ножного педального переключателя (т.е. нажатие на переключатель) может направлять сигнал на ЦПУ приводного блока, который в свою очередь направляет сигнал на контроллер электронного стимулятора для изменения стимулов в мощности, продолжительности, частоте, нарастающего или убывающего заряда тока с использованием автоматически нарастающего электрического импульса «АНЭИ» (Automatic Incremental Electric Impulse, «AIEI») с конкретным Исходным током. Эти сигналы управления от оператора могут функционировать отдельно друг от друга, т.е., влияя либо на поток текучей среды, либо на электрическую стимуляцию. Дополнительно, первичный или вторичный механизм ввода может представлять собой кнопку управления, такую как кнопка 125 на ручном блоке. Приведение в действие кнопки 125 управления может направлять сигнал на ЦПУ для предоставления ввода о реакции во время процедуры.
[0067] Как описано выше, система выполнена с возможностью регулирования потока текучей среды во время процедуры. В дополнение к использованию привода для управления включением/выключением, система может обеспечивать две или более настройки расхода. В частности, блок 50 управления может содержать насос с регулируемой скоростью, обеспечивающий варьируемый расход. Аналогично, насос может иметь два или более заранее заданных расхода. В настоящем случае блок 50 управления содержит электрический двигатель 70, регулирующий скорость, с которой блок управления смещает поршень 34 в шприце 30. Блок 50 управления может регулировать скорость двигателя 70 так, чтобы обеспечивать работу двигателя на одной из нескольких заранее заданных скоростей для обеспечения нескольких заранее заданных расходов. Разные расходы могут быть использованы в сочетании с разными настройками давления и разными настройками электрической стимуляции во время разных частей процедуры. Например, система может быть выполнена стремя предварительными установками, как показано ниже в таблице. Предварительные установки включают различные характеристики, такие как высокий и низкий пороговые уровни давления, высокая и низкая интенсивности стимуляции, расход и максимальное давление или давление отключения. Если измеренное давление текучей среды выше порога «Низкого давления», электрическая стимуляция осуществляется на уровне, обозначенном как «Стимуляция при низком давлении». Если измеренное давление текучей среды выше «Порога высокого давления, электрическая стимуляция осуществляется на уровне, обозначенном как «Стимуляция при высоком давлении». «Расход» представляет собой расход текучей среды, подаваемый из резервуара для текучей среды (например, шприца 30). «Давление отключения» представляет собой давление текучей среды, при котором система будет прерывать поток текучей среды. В частности, если измеренное давление текучей среды превышает давление отключения, узел 50 управления остановит насос для остановки потока текучей среды к игле.


[0068] Как указано выше, разные предварительные установки могут быть использованы во время разных частей процедуры. Например, эта первая предварительная установка может быть использована во время первой части процедуры, такой как часть процедуры, на которой оператор пытается расположить конец иглы рядом с целевым нервом. Во время этой части «Нахождения цели» процедуры используют постоянный низкий «Расход» для обеспечения повышенной чувствительности к изменениям давления. После расположения иглы рядом с целевым объектом, система может переключаться на вторую предварительную установку. Во время второй предварительной установки, расход увеличивают для обеспечения подтверждения расположения иглы. В частности, если систему используют в сочетании с ультразвуковым исследованием, обнаружение расположения иглы может быть затруднено в зависимости от количества переменных, таких как ориентация иглы. Однако если обеспечивается быстрое вливание текучей среды, как определено в предварительной установке 2, текучая среда будет отображена на дисплее ультразвукового исследования как темный анэхогенный карман текучей среды. Таким образом, положение кармана текучей среды на ультразвуковом изображении будет указывать на положение иглы. Дополнительно, конкретная форма текучей среды на ультразвуковом изображении может подтверждать экстраневральное, а не интраневральное положение иглы. Например, тороидальное пространство текучей среды может подтверждать, что игла находится в непосредственной близости от нерва и расположена экстраневрально. Следовательно, отображение такой формы может обеспечивать подтверждение правильного расположения иглы. Однако следует понимать, что в качестве подтверждения экстраневрального расположения иглы могут быть использованы различные формы.
[0069] После подтверждения положения иглы при помощи второй предварительной установки, «Подтверждение», используют третью предварительную установку (Предварительная установка 3), именуемую предварительной установкой «Инфузия». Эта третья предварительная установка имеет более высокий расход так, чтобы обеспечивать возможность быстрого вливания разовой доли лекарственного средства в целевую область рядом с нервом для максимальной эффективности.
[0070] Переключение между предварительными установками может быть ручным или автоматическим. Например, оператор может манипулировать устройством ввода, таким как клавиатура, сенсорная панель, кнопка на ручном блоке или т.п., как указано выше. Альтернативно, система может автоматически переключаться на вторую предварительную установку на основании обнаруженного критерия, такого как давление текучей среды, электрическое сопротивление или изменение в электрическом сопротивлении. Блок 50 управления может быть заранее настроен с разными предварительно установленными характеристиками, такими как предварительные установки, описанные выше. Например, предварительно установленные характеристики могут быть заданы оператором перед процедурой, или предварительно установленные значения могут быть предварительно запрограммированы в систему. Дополнительно, система может позволять пользователю изменять предварительно установленные характеристики во время использования. Кроме того, следует понимать, что может быть использовано любое количество предварительных установок. Выше описаны три предварительные установки; однако система может использовать меньшее количество предварительных установок. Например, система может не содержать ни одной предварительной установки, а пользователь может просто изменять разные значения во время процедуры. Альтернативно, система может быть запрограммирована так, чтобы иметь только две предварительные установки, такие как предварительная установка «Нахождение цели» и предварительная установка «Инфузия». Кроме того, система может иметь четыре или более предварительных установок, которые включают разные рабочие характеристики для разных применений. Инкрементальный режим: запускается во время процедуры по требованию или автоматически для определенного порогового уровня давления, обеспечивается увеличение тока на заранее определенные шаги за короткий отрезок времени для обнаружения наличия или отсутствия моторного ответа, например, на 0,2 мА в Целевом режиме 1, в случае повышения давления заряд тока постепенно увеличивается относительно быстро до 2 мА; оператор может остановить подачу тока в случае наличия моторного ответа.
Способ работы
[0071] Ниже будет описан приведенный в качестве примера способ осуществления инъекции блокады нерва при помощи описанной выше системы. Следует понимать, что настоящая система не ограничена использованием в процедурах блокады периферического нерва. Соответственно, следует понимать, что описанные ниже принципы и способы могут быть легко приспособлены для инъекций в ткани и анатомические участки в различных применениях и процедурах.
[0072] Система может быть использована для обнаружения того, расположена ли игла так, чтобы вдавливать пучок, или внутри него (т.е. интрафасцикулярное расположение). Система осуществляет определение на основании сочетания нескольких переменных. Во-первых, если игла проколола периневрий, давление текучей среды будет довольно высоким, так как аксоны плотно расположены внутри эндоневрия, а периневрий образует границу жесткого и мало податливого компонента. Дополнительно, если игла проколола эндоневрий, оператор, вероятно, будет наблюдать заметный электрический моторный ответ (ВМО) на электрическую стимуляцию низким зарядом тока, применяемую к пациенту на конце иглы или рядом с ним. Кроме того, по мере приближения иглы к нерву, нерв может реагировать на электрический заряд более низкой мощности (<2 мА). Следовательно, может осуществляться наблюдение различных признаков для определения того, расположена ли игла интрафасцикулярно и, следовательно, требует изменения расположения. Следовательно, система может работать следующим образом.
[0073] Со ссылкой на фиг. 4, на этапе 500 оператор выбирает параметры процедуры, такие как верхний порог и/или расход текучей среды, и/или давление текучей среды, с которым начинается электрическая стимуляция, или исходный заряд тока для начала процедуры. Например, оператор может установить верхний порог давления, например 300 мм рт.ст., и оператор может установить порог для начала электрической стимуляции или начала нарастающий заряд тока выше исходного тока при 50 мм рт.ст. Альтернативно, верхний порог может быть предварительно установлен в системе, когда оператор выбирает тип процедуры, для которой будет использована система. Аналогично, оператор может выбирать расход текучей среды через иглу, или расход может быть установлен автоматически при выборе типа процедуры оператором. Дополнительно, оператор может выбирать характеристики электрической стимуляции нерва, которые подлежат применению, такие как частота, высокая мощность, низкая мощность, исходный заряд тока, шаги нарастающего заряда тока по мощности, продолжительности частоте, интервалу и т.д. После выбора параметров процедуры, оператор указывает, что следует начать процедуру. Например, оператор может нажать на кнопку начала на приводном блоке.
[0074] На этапе 510 оператор продвигает иглу в тело пациента. Иглу могут продвигать с различными скоростями введения, например, 1-3 мм/с. Предпочтительно, иглу вводят по существу с постоянной скоростью. Дополнительно, система управления обеспечивает непрерывный поток ионной текучей среды через конец иглы во время процедуры. Расход может варьироваться в зависимости от разных параметров, как описано выше. Например, поток текучей среды может вливаться со скоростью приблизительно 0,02 мл/с, если давление текучей среды в игле не превышает максимальный порог.
[0075] На этапе 520 применяют электрическую стимуляцию (ЭС). Например, электрическую стимуляцию применяют через конец изолированной иглы. Ионная текучая среда, вливаемая через иглу, уменьшает сопротивление, что может уменьшить болевые ощущения или дискомфорт, которые пациент может испытывать от электрической стимуляции. Мощность и частота электрической стимуляции может варьироваться в зависимости от параметров, установленных во время этапа 500 настройки. Хотя на фиг. 4 показана электрическая стимуляция как начинающаяся после ввода иглы в тело пациента, следует понимать, что электрическая стимуляция может не начинаться до более поздней части процедуры. Например, электрическая стимуляция может не начинаться до превышения порога давлением текучей среды. В таком способе электрическая стимуляция не начнется до этапа 540, описанного ниже.
[0076] На этапе 530, когда оператор продвигает иглу, система непрерывно определяет давление текучей среды на конце иглы и предоставляет визуальную или звуковую обратную связь относительно определенного давления. Например, как описано выше, система может содержать датчик 40 давления, выполненный с возможностью измерения давления текучей среды в соответствии с иглой. Датчик может направлять сигналы на блок 50 управления, которые могут быть использованы для управления электрической стимуляцией.
[0077] На этапе 535 система сравнивает обнаруженное давление текучей среды с заранее определенным порогом. В настоящем случае этап 535 происходит во время вливания лекарственного средства. Если обнаруженное давление текучей среды не превышает порог, то способ возвращается на этап 510, а оператор продолжает продвигать иглу пытаясь определить местоположение целевого нерва. Если система обнаруживает, что давление текучей среды превышает порог, то способ переходит к этапу 540.
[0078] На этапе 540 давление превышает порог, поэтому обеспечивается изменение характеристики электрической стимуляции нерва. Например, как описано выше, электрическая стимуляция может не начинаться до превышения первого порога давлением текучей среды. Если давление текучей среды превышает первый порог, то система начинает электрическую стимуляцию на этапе 540. Аналогично, если давление текучей среды превышает второй порог, то система изменяет мощность электрической стимуляции на этапе 540 и продолжает осуществлять электрическую стимуляцию. Например, система может быть выполнена таким образом, чтобы применять электрическую стимуляцию 1,0 мА в начале электрической стимуляции. Если давление текучей среды превышает второй порог, то мощность электрической стимуляции может быть уменьшена, например, путем понижения электрической стимуляции до 0,4 мА.
[0079] На этапе 540 электрическая стимуляция нерва может быть изменена вручную или автоматически системой в ответ на превышение верхнего порога давлением текучей среды. Например, как только давление текучей среды превышает второй порог, система может автоматически изменять электрическую стимуляцию (например, путем начала или путем изменения мощности). Альтернативно, система может подавать сигнал пользователю (такой как звуковой или визуальный сигнал), а оператор может изменять электрические стимулы путем манипулирования элементом управления, таким как кнопка или сенсорный экран. В ответ на указание оператора обеспечивается изменение электрической стимуляции нерва и ее применение к пациенту.
[0080] На этапе 545 за пациентом наблюдают для обнаружения любой клинически наблюдаемой реакции, такой как мышечная судорога. Как описано ниже, это наблюдение может быть осуществлено вручную, например, путем визуального наблюдения мышечной судороги оператором и затем приведения в действие механизма ввода, например, нажатием кнопки. Альтернативно, наблюдение может быть автоматическим. В частности, система может содержать датчик для определения судороги. Если датчик обнаруживает характеристику, указывающую на мышечную судорогу, то датчик подает сигнал к системе, указывающий на обнаружение судороги. Если в ответ на электрическую стимуляцию судорога не обнаружена, то способ возвращается на этап 510, а оператор продолжает продвигать иглу. При обнаружении судороги игла может быть расположена рядом с целевым нервом. Однако так как давление текучей среды превышает второй порог, игла может быть расположена интрафасцикулярно, что может приводить к повреждению или осложнениям, если анестезирующее средство введено при нахождении иглы в нерве. Соответственно, при обнаружении судороги на этапе 545 способ может переходить далее к этапу 550.
[0081] На этапе 550 оператор изменяет расположение иглы, пытаясь расположить конец иглы рядом с нервом, но не в нерве или в непосредственном контакте с поверхностью периневрия нерва. Например, оператор может незначительно отводить иглу, а затем пытаться расположить конец иглы рядом с нервом. Этап изменения положения может быть направлен ультразвуковым исследованием так, чтобы предоставлять оператору визуальное подтверждение того, что игла отведена от нерва и затем повторно расположена рядом с нервом. Если игла была расположена внутри нерва, давление текучей среды превысит второй порог, как описано выше. Аналогично примеру предварительной установки 1, если давление превышает значение порогового уровня давления 300 мм рт. ст.и оператор обнаружил мышечную судорогу от уменьшения мощности электрической стимуляции, то оператор подает сигнал ввода и система обеспечит предупреждение или уведомление и предотвратит дальнейшее вливание текучей среды оператором. Если иглу затем отводят, то давление текучей среды должно упасть ниже порога таким образом, чтобы обеспечивать возможность возобновления потока текучей среды. Соответственно, после изменения положения иглы способ переходит к этапу 555.
[0082] На этапе 555 давление текучей среды оценивают для определения того, превышает ли давление текучей среды второй порог. Если давление текучей среды превышает второй порог, как в этом примере 300 мм рт.ст. (Предварительная установка 1), то конец иглы может быть все еще внутри нерва. Соответственно, способ возвращается на этап 550 так, чтобы обеспечивать возможность изменения положения иглы. Альтернативно, игла может быть отведена и процесс может начаться повторно с этапа 510. Если в результате этапа изменения положения иглы конец иглы был отведен из нерва (т.е. из интрафасцикулярного положения), то отведение иглы обеспечит падение давления текучей среды ниже второго порога. Следовательно, если давление текучей среды падает ниже второго порога, способ переходит далее к этапу 565.
[0083] На этапе 565 применяют электрическую стимуляцию, и оператор наблюдает, присутствует ли судорога в ответ на электрическую стимуляцию. Если наблюдение судороги осуществляется оператором, в таком случае оператор может осуществить ввод в систему, указывающий на то, была ли обнаружена видимая реакция. Например, оператор может нажать на первую кнопку, если он заметил судорогу, или оператор может нажать на вторую кнопку, если он не заметил судороги. Следует отметить, что применяемая электрическая стимуляция является электрической стимуляцией, которая была изменена на этапе 540. Например, если давление текучей среды превышает второй порог, и мощность электрической стимуляции была уменьшена, применение электрической стимуляции будет продолжено на этапе 565. Следовательно, если оператор обнаруживает судорогу на этапе 565, он получил подтверждение того, что нерв отреагировал на измененную (т.е. увеличенную или уменьшенную мощность) электрическую стимуляцию и что давление текучей среды сопоставимо с экстраневральным положением. Соответственно, если оператор обнаруживает судорогу в ответ на электрическую стимуляцию, то способ переходит далее к этапу 570. Если оператор не наблюдает судорогу, то процедура возвращается к этапу 510 для повторного начала поиска целевого нерва.
[0084] На этапе 570 система подает сигнал оператору, указывающий на надлежащее положение иглы для инъекции (т.е. конец иглы расположен экстрафасцикулярно). Например, блок 50 управления может подавать звуковой сигнал, например, воспроизводя слово «продолжайте», или изображая визуальный сигнал, такой как слово «продолжайте» на дисплейном экране приводного блока или ручного блока.
[0085] На этапе 570 расход текучей среды увеличивают до второго расхода, который больше первого расхода. Оператор может вводить предварительное количество, которое может поддаваться наблюдению, чтобы позволять оператору обнаруживать надлежащее расположение иглы. После подтверждения расположения оператор может вводить разовую долю текучей среды для анестезирования пациента. Альтернативно, оператор может вводить разовую долю текучей среды без предварительного введения определенного количества для подтверждения расположения иглы. В любом случае, определенное количество текучей среды вводят на этапе 570 с более высоким расходом, чем предыдущий низкий расход. Например, приводной блок может автоматически увеличивать расход, например, путем увеличения скорости двигателя
[0086] Как описано выше, система может совмещать различные измеренные характеристики для определения, расположена ли игла рядом с целевым нервом и расположена ли игла интрафасцикулярно или экстрафасцикулярно. В приведенном в качестве примера способе, изображенном на фиг. 5, способ включает признаки, касающиеся давления текучей среды на конце иглы, а также мощности применяемой электрической стимуляции.
[0087] Следует понимать, что приведенные выше значения, такие как порог 300 мм рт. ст.в качестве максимального предварительно установленного давления для остановки потока текучей среды, являются примерными и что на усмотрение клинического врача может быть выбрано более низкое или высокое предварительно установленное давление. Аналогично, значения 0,4 мА и 1,0 мА для более низкой и более высокой силы электрического тока приведены в качестве примера, и могут быть установлены более высокие или низкие значения. Однако в настоящем случае может быть желательным выбрать более высокую амперную нагрузку, которая не превышает 2,0 мА. Способы, описанные в настоящем документе, одинаково применимы к тканям человека и животного.
Изменяемый нарастающий заряд электрического тока
[0088] В предшествующем описании система описана как предоставляющая электрический импульс или заряд, который может изменяться в ответ на определенные характеристики, такие как обнаружение превышения порога давлением текучей среды. Однако перед обнаружением характеристики, электрический импульс был в целом неизменным. Однако может быт желательно предоставление электрического импульса, который изменяется непрерывно, как более подробно описано ниже.
[0089] Далее со ссылкой на фиг. 6-8 изображен альтернативный вариант реализации системы. Система 610 выполнено подобно системе 10, описанной выше, за исключением того, что система содержит отдельный привод, и система содержит контроллер, запрограммированный для обеспечения электрической стимуляции, в которой электрический импульс непрерывно изменяется.
[0090] Система 610 содержит систему 650 доставки лекарственного средства, выполненную подобно системе 10 и системе 50 доставки лекарственного средства, описанным выше. Аналогично, система 610 содержит инъекционный узел 620 и ручной блок или иглу 700 в сборе. Если иное не описано ниже, элементы 620, 650 и 700 выполнены подобно соответствующим элементам 20, 50 и 100, описанным выше.
[0091] Система 610 дополнительно содержит дистанционный привод 750. Дистанционный привод 750 может представлять собой отдельный элемент, или он может быть встроен в ручной блок 700. Альтернативно, ручной блок 700 может представлять собой простую рукоятку, а дистанционный привод 750 может быть выполнен отдельно. Дополнительно, дистанционный привод 750 может фактически быть встроен в систему 650 доставки лекарственного средства. Вне зависимости от того, дистанционный привод является отдельным элементом или встроен в другой элемент системы, в следующем описании привод именуется дистанционным приводом.
[0092] В настоящем случае дистанционный привод 750 выполнен как отдельный элемент, приводимый в действие вручную, соединенный с системой 650 доставки лекарственного средства. Дистанционный привод может являться любым из широкого разнообразия приводов, например, удерживаемым в руке устройством с одним или более механизмами ввода, такими как кнопки или т.п. Альтернативно, дистанционный привод может включать один привод, регулирующий работу системы посредством способа задействования привода. Например, дистанционный привод может быть ножной педалью, чтобы оператор мог управлять приводом без использования своих рук. Оператор может направлять разные команды системе путем изменения способа задействования ножной педали. Например, одно нажатие (нажатие и отпускание) ножной педали может подавать первый командный сигнал на приводной блок 650, а быстрое двойное нажатие может направлять второй сигнал на приводной блок. Дополнительно дистанционный привод может содержать приводимый в действие голосом элемент, чтобы позволять оператору подавать сигналы управления на приводной блок посредством голосового управления.
[0093] Как указано выше, блок 650 управления может быть выполнен с возможностью регулирования разнообразных рабочих настроек в ответ на сигналы, полученные от дистанционного привода 750. Например, дистанционным приводом могут управлять для регулирования одного или более из следующих параметров:
Расход: Поток текучей среды от приводного блока 650 может быть изменен вручную путем приведения в действие дистанционного привода (например, нажатия на кнопку). При каждом приведении привода в действие блок управления может увеличивать расход на заранее определенные шаги повышения (например, 0,02 мл/с). Альтернативно, расход может быть изменен путем нажатия и удержания привода для увеличения расхода до высвобождения привода (подобным образом, расход может быть уменьшен на инкрементальные шаги).
Быстрой поток: приведение в действие дистанционного привода может обеспечивать резкий выброс текучей среды (например, 0,1 мл/с) для подтверждения надлежащего положения конца иглы в начале инъекции местного анестезирующего средства
Турбопоток: приведение в действие дистанционного привода может вводить разовую дозу анестезирующего средства при надлежащем расположении иглы (например, 0,2 мл/с).
Цикл аспирации: приведение в действие дистанционного привода обеспечивает обратный ход поршня шприца приводного блока 650. Обратный ход поршня осуществляют для аспирации шприца для определения того, проник ли конец иглы в кровеносный сосуд, и для идентификации крови в канюле иглы или трубках во время аспирации.
«Остановка»: приведение дистанционного привода в действие останавливает поток текучей среды от приводного блока 650.
Приведение в действие автоматического нарастающего электрического импульса: электрическая стимуляция может регулироваться дистанционным приводом так, что приведение в действие дистанционного привода начинает или завершает автоматически нарастающий электрический импульс.
Стимулятор нерва: характеристика электрических импульсов, обеспечиваемых генератором стимулов, может регулироваться дистанционным приводом. Например, мощность электрических импульсов может быть изменена или они могут быть прекращены. Аналогично, профиль заряда, описанный ниже, может быть изменен путем приведения дистанционного привода в действие.
[0094] Дистанционный привод может взаимодействовать с блоком 650 управления при помощи проводного или беспроводного соединения. Например, дистанционный привод может представлять собой удерживаемое в руке устройство дистанционного управления с несколькими кнопками управления, которое выполненное с возможностью беспроводного взаимодействия с блоком 650 управления через Bluetooth или подобное беспроводное известное подключение. Вне зависимости от конструкции дистанционного привода, дистанционный привод выполнен с возможностью приведения в действие оператором во время процедуры для направления одного или более сигналов управления на приводной блок для регулирования потока текучей среды или электрической стимуляции, обеспечиваемой системой.
[0095] Как более подробно описано ниже, система 610 может быть выполнена с возможностью обеспечения непрерывно переменного электрического импульса. Этот переменный электрический импульс в настоящем документе именован стимуляцией током с автоматически нарастающим электрическим импульсом. Термин «автоматически нарастающий электрический импульс» можно трактовать в соответствии со следующим определением: профиль заряда, содержащий совокупность заранее определенных предварительно установленных значений заряда для стимуляции нерва. Автоматически нарастающий электрический импульс может быть использован вместо постоянной стимуляции, или автоматически нарастающий электрический импульс может быть использован в сочетании с постоянной стимуляцией. Например, как более подробно описано ниже, система может использовать постоянный электрический импульс во время части процедуры, а во время другой части процедуры система может обеспечивать стимуляцию автоматически нарастающим электрическим импульсом. Соответственно, система 610 может быть выполнена так, чтобы иметь несколько разных режимов работы таким образом, чтобы оператор мог выбирать из нескольких разных режимов в зависимости от его предпочтения касательно характеристик процедуры. Например, система 610 может быть запрограммирована так, чтобы иметь Ручной режим, Автоматический режим, Полуавтоматический режим, которые описаны ниже:
Ручной режим: управление стимулятором нерва может осуществляться оператором посредством дистанционного привода 750. Оператор может регулировать расход текучей среды от приводного блока 650 и стимуляцию нерва как отдельные параметры с ручным управлением.
Автоматический режим: давление регулирует начало автоматически нарастающего электрического импульса. Дополнительно, при сочетании заряда минимальной мощности с определенным максимальным пороговым уровнем давления, при котором идентифицирован вызванный моторный ответ (электрический моторный ответ), система прекращает подачу потока текучей среды к игле. Эти условия могут также сочетаться с уведомлением или предупреждением к оператору о том, что такие условия были обнаружены, которое служит «предупреждающим» условием и «тревожным» условием не продолжать инъекцию текучей среды в тело пациента.
Полуавтоматический режим: управление считыванием давления может осуществляться в сочетании с одноимпульсным электрическим зарядом, в котором условия порогового уровня давления и заряда минимальной мощности вызывают вызванный моторный ответ, система автоматически генерирует предупреждение и останавливает поток текучей среды на основании реакции и ввода в систему касательно наблюдения электрического моторного ответа.
[0096] Как описано выше, блок 650 управления содержит генератор стимулов для обеспечения электрического импульса для стимуляции нерва. Генератор стимулов может быть запрограммирован для обеспечения множества разных профилей для электрических импульсов, без ограничения включая следующие:
Режим отсутствия стимуляции нерва: электрический ток не испускается.
Одноимпульсный режим: система испускает один импульс определенной мощности и продолжительности (заряд тока), известный как одиночный импульс или судорога. Например, импульс от 0,1 до 6 мА на протяжении 0,1 мс или от 0,5 до 6 мА на протяжении 1 мс, от 1 до 4 Гц.
Режим автоматически нарастающего электрического импульса: обеспечивается последовательность изменяющихся электрических импульсов. Импульсы могут начинаться с первого электрического импульса и увеличиваться со ступенчатым нарастанием до максимального значения, а затем сбрасываться до минимального значения. Таким образом, генератор стимулов обеспечивает последовательность импульсов, непрерывно ступенчато изменяющихся на протяжении активности автоматически нарастающего электрического импульса.
[0097] Задача стимуляции нерва заключается в вызове заметной мышечной судороги или вызванного моторного ответа, как описано выше. Оператор может наблюдать за пациентом для обнаружения вызванного моторного ответа. В ответ на вызванный моторный ответ оператор может вводить данные в систему, указывающие на наблюдение вызванного моторного ответа в ответ на стимуляцию нерва. Например, оператор может управлять приводом, таким как дистанционный привод 750, если он обнаруживает вызванный моторный ответ. Альтернативно, система может содержать датчик 775 для определения характеристики, указывающей на вызванный моторный ответ. Датчик может являться отдельным элементом, или он может быть включен в ручной блок, на котором установлена игла. Например, датчик 775 может содержать электродный датчик акселерометра или электромиографа, или подобный элемент, для обнаружения вибраций, указывающих на мышечную судорогу в ответ на стимуляцию нерва. В ответ на обнаружение характеристики, указывающей на судорогу, датчик 775 направляет сигнал, указывающий на протекание судороги, на приводной блок. Как более подробно описано ниже, система может далее управлять текучей средой и стимуляцией нерва в ответ на сигнал, указывающий на протекание судороги.
[0098] В предшествующем описании система содержит систему 650 доставки лекарственного средства, включающую генератор стимулов для обеспечения последовательности электрических импульсов для обеспечения стимуляции нерва с целью определения того, расположена ли игла в подходящем месте относительно нерва. Также может быть желательно включение ультразвукового зонда для предоставления оператору определенного визуального направления. В частности, система может содержать ультразвуковую систему 800, содержащую зонд 810, который содержит ультразвуковой преобразователь для излучения и приема звуковых волн и передачи сигнала, относящегося к звуковым волнам, к ультразвуковому процессору для образования снимков УЗИ. Система 610 может дополнительно содержать дисплей для отображения ультразвуковых изображений для отображения изображений иглы относительно целевого нерва. Дополнительно, может быть желательно встраивание дистанционного привода 750 в ультразвуковые элементы. Например, дистанционный привод 750 может быть встроен в ультразвуковой зонд 810 так, чтобы обеспечивать возможность дистанционного управления потоком текучей среды и/или стимуляцией нерва посредством привода ультразвуковом зонде.
[0099] С учетом вышеизложенного, система может быть использована для обеспечения последовательности электрических импульсов для обеспечения стимуляции нерва, и характеристики электрических импульсов могут варьироваться во время разных частей процедуры. Дополнительно, характеристики электрических импульсов могут варьироваться на основании того, указывает ли дополнительная информация, предоставляемая системой, на близкое расположение конца иглы к целевому участку. Например, при использовании ультразвукового исследования и если изображения четко показывают иглу относительно целевого нерва, ультразвуковое исследование обеспечивает информацию, которая направляет иглу в участок рядом с нервом. В таких случаях оператору только требуется использовать стимуляцию нерва для направления иглы во время последней части введения иглы. Другими словами, во время локализованного режима стимуляцию нерва используют для направления иглы, когда она уже расположена относительно близко к целевому нерву. Этот локализованный поиск именуют как Целевой режим. В отличие от него, если оператор не имеет дополнительной информации о положении иглы, то стимуляцию нерва используют для направления иглы к целевому нерву с большего расстояния. Например, изображения из ультразвукового исследования могут не обеспечивать четкого указания близкого расположения иглы к нерву, или ультразвуковое исследование может вовсе отсутствовать во время процедуры. В таких случаях стимуляцию нерва используют для направления иглы с большего расстояния, чем при Целевом режиме. Этот поиск в широкой области именуют как Режим поиска. Система может быть выполнена с возможностью обеспечения направления во время Режима поиска и Целевого режима. Дополнительно, система может переключаться из Режима поиска в Целевой режим во время процедуры. Во время Режима поиска электрические импульсы в целом имеют более высокую мощность, так как игла более удалена от целевого нерва. Во время Целевого режима электрические импульсы в целом имеют более низкую мощность, так как игла находится ближе к целевому нерву.
[00100] В дополнение к близости к нерву, характеристики пациента могут влиять на подходящие электрические импульсы. Например, при применении в педиатрии, электрические импульсы в целом ниже, чем для взрослого пациента. Соответственно, характеристики электрических импульсов могут быть изменены на основании физических характеристик пациента.
[00101] Система может содержать несколько заранее определенных профилей стимуляции, основанных на различных переменных. Например, профили могут быть основаны на работе системы в Целевом режиме или в Режиме поиска. Аналогично, детали профилей могут быть основаны на том, является пациент ребенком или взрослым. Соответственно, система запрограммирована так, чтобы иметь несколько заранее определенных профилей, именуемых как профили заряда. Каждый профиль заряда содержит информацию, относящуюся к электрическим импульсам, которые подлежат применению во время использования профиля. Например, профиль может содержать начальную или минимальную мощность для заряда тока. Если профиль предназначен для процедуры, в которой электрическая стимуляция подлежит изменениям, например, автоматически нарастающий электрический импульс, профиль может также содержать такую информацию, как максимальная мощность для заряда. Дополнительно, профиль может содержать промежуточные значения между минимальным и максимальным, и промежуток времени между шагами нарастания. Профиль заряда может также содержать продолжительность каждого электрического импульса. Дополнительно, один или более профилей заряда могут включать стабильную или постоянную стимуляцию во время части процедуры и переменную стимуляцию во время части процедуры. Профиль заряда может хранить данные, относящиеся к электрическим импульсам, подлежащим применению во время обеих частей процедуры. Профиль заряда может также содержать данные, относящиеся к характеристикам, которые определяют обеспечение постоянной или переменной стимуляции. Например, стимуляция нерва может начинаться на постоянном уровне, на котором генератор стимулов обеспечивает последовательность электрических импульсов постоянной мощности. Если система обнаруживает давление текучей среды на конце иглы, превышающее пороговое значение, то система может автоматически переключаться для обеспечения переменной стимуляции, при которой генератор стимулов обеспечивает последовательность электрических импульсов переменной мощности.
[00102] Со ссылкой на фиг. 7, диаграмма изображает несколько положений конца иглы относительно целевого нерва, обозначенного N. Положения иглы обозначены 1-7. В положении 1 игла расположена в мышце, расположенной на расстоянии от целевого нерва N. В положении 1 давление текучей среды в игле является относительно низким, так как мышца имеет более низкую плотность и, так как игла находится на расстоянии от целевого нерва, вызванный моторный ответ отсутствует даже в ответ на электрическую стимуляцию высокой мощности. В положении 2 игла находится в или на фасции, которая представляет собой структуру относительно высокой плотности. Следовательно, давление текучей среды будет относительно высоким; однако так как игла находится на расстоянии от целевого нерва, вызванный моторный ответ, вероятно, будет отсутствовать. В положении 3 иглы игла находится в интерстициальном материале, который имеет низкую плотность, поэтому обнаруженное давление текучей среды будет низким, а вызванный моторный ответ не ожидается при невысокой мощности электрической стимуляции. В положении 4 конец иглы находится рядом с параневрием таким образом, что конец иглы расположен за пределами целевого нерва, но рядом с нервом. В этом случае обнаруженное давление текучей среды должно быть относительно низким, а вызванный моторный ответ должен наблюдаться при электрической стимуляции низкой и высокой мощности. В положениях 5, 6 и 7 игла находится внутри нерва или внутри эпиневрия или периневрия нерва. Следовательно, в каждом из этих положений введение текучей среды может повредить нерв. В каждом из положений 5-7 вызванный моторный ответ должен наблюдаться в ответ на стимуляцию нерва высокой мощности и низкой мощности. В положениях 5 и 7 давление текучей среды является относительно высоким, а давление текучей среды в положении 6 может быть относительно низким.
[00103] Задача системы заключается в направлении иглы к положению 4 иглы. В частности, система обеспечивает возможность осуществления инъекции БПН, в которой положение конца иглы относительно анатомических структур может быть определено через понимание совокупности условий при использовании давления на выходе и электрических моторных ответов от стимуляций нерва в сочетании с наблюдением или обнаружением реакции возбуждения мышцы или ее отсутствием как информации, на основании которой производятся действия посредством прямого или непрямого ввода в систему или посредством выполнения конкретного действия на основании мышечной реакции. Таким образом, давление и электрический заряд от системы могут быть использованы в сочетании наблюдаемым или зарегистрированным электрическим моторным ответом, таким образом обеспечивая возможность определять, находится ли игла далеко от нерва (например, положения 1-4 иглы), рядом с нервом (например, положение 4 иглы), на или в нерве или внутри пучка (например, положения 5-7 иглы). Пиковое давление указывает на то, что игла находится в плотной соединительной ткани, такой как фасция, вдавливает нерв или расположена интраневрально, т.е. в самом нерве, расположена интрафасцикулярно.
[00104] Далее со ссылкой на фиг. 8 будут описаны детали приведенного в качестве примера способа использования системы 650.
[00105] Этап 810: Система содержит множество сохраненных совокупностей данных относительно профилей заряда, которые могут быть использованы во время процедуры. Оператор вводит информацию, которая управляет работой системы во время процедуры, такую как начальный расход, целевой порог давления текучей среды и профиль заряда, подлежащий использованию. Профили заряда, запрограммированные в систему, могут включать данные для регулирования исходной мощности заряда и стимуляции током с автоматически нарастающим электрическим импульсом. Хотя система может содержать множество различных профилей заряда, настоящий пример включает четыре профиля.
Автоматическое повышение заряда тока за короткий отрезок времени 1,2,4, 8 герц

[00106] Целевой режим 1 и Режим поиска 1 являются профилями заряда для пациента первого типа, например, для взрослого пациента. Режим поиска 1 является профилем высокой мощности или «поисковым» профилем, используемым во время режима широкой области, например, при низком качестве ультразвукового изображения. Целевой режим 1 является профилем с минимальной мощностью или «целевым» профилем, в котором игла, вероятно, расположена на участке нерва. Целевой режим 2 и Режим поиска 2 предназначены для пациента второго типа, например, пациента педиатрического профиля. Более конкретно:
Целевой режим1: при помощи направления ультразвуковым исследованием в благоприятном случае (изображение высокого качества, хорошая эхогенность), исходный уровень тока может быть установлен на самое низкое значение (0,2 мА - 0,1 мс) для обнаружения более глубокого расположения конца иглы, чем предполагаемое на ультразвуковом изображении (дальше требуемого положения), которое приводит к необратимому контакту с нервом или прокалыванию нерва.
Целевой режим 2: исходный ток может быть установлен на более высокое значение тока, например, в неблагоприятном случае (изображение низкого качества, плохая эхогенность). Использование исходного тока более высокой мощности позволяет оператору быть уведомленным о приближении конца иглы к нерву на большем расстоянии, чем к фактическому целевому объекту, при невысокой резкости изображения.
Режим поиска 1: например, при помощи ультразвукового направления для различения между сухожилием и нервом. При приближении к структуре, моторный ответ будет наблюдаться перед нервом, моторный ответ будет отсутствовать при расположении в непосредственной близости от сухожилия. В этом режиме используют более мощный заряд тока, чтобы помогать оператору идентифицировать первичный вызванный моторный ответ для способствования направлению к целевому конечному объекту.
Режим поиска 2: например, без ультразвукового исследования, для обнаружения структуры нерва на расстоянии от конца иглы. Этот режим оператор использует при нахождении на большем расстоянии от целевого объекта. Оператор получает направление путем подачи более мощного электрического заряда (начиная от 0,5 мА - 1 миллисекунды), который может вызывать моторный ответ на большем расстоянии от целевого объекта.
[00107] Как указано выше, ультразвуковой дисплей может обеспечивать определенное визуальное направление во время процесса, но за исключением выбора профиля заряда, способ описан ниже без ввода от ультразвукового исследования.
[00108] Во время этого этапа систему запускают путем запуска системы посредством механизма ввода на приводном блоке 650 или дистанционном приводе 750. Систему устанавливают с использованием шприца (например, 20 мл), с иглой 22 размера для стимуляции нерва (от 19G до 25G, длина от 25 мм до 15 см). Трубка выполнена с высокой твердостью и уменьшенным диаметром, в настоящем использовании - инструмент CompuFlo ®. Это обеспечит активацию приводного блока 650, что запускает расход. В настоящем случае изначальный расход составляет 0,01 мл/с, а изначальная стимуляция нерва имеет постоянное значение, именуемое как Исходный электрический ток. Этап 820: После выбора профиля заряда, оператор продвигает иглу, в то время как система обеспечивает непрерывный минимальный поток текучей среды, а стимулятор обеспечивает Исходный заряд тока.
[00109] Этап 825: Если обнаружена мышечная судорога, игла может находиться в области нерва. Следовательно, по мере того, как оператор продвигает иглу, оператор наблюдает за пациентом для идентификации того, вызывает ли Исходная стимуляция судорогу. Если судорога обнаружена, способ переходит далее к этапу 860, описанному ниже. Если оператор наблюдает судорогу, он может приводить в действие привод (например, посредством дистанционного привода 650) для направления сигнала к системе, указывающего на то, что судорога была обнаружена. Альтернативно, система может содержать детектор для автоматического обнаружения протекания судороги. Например, система может содержать датчик для обнаружения вибраций, указывающих на судорогу. В ответ на обнаружение судороги, датчик может направлять сигнал к системе, чтобы система переходила далее к этапу 860.
[00110] Этап 830: В то время как оператор продвигает иглу, приводной блок 650 постоянно измеряет давление текучей среды в игле. Пока давление текучей среды остается ниже порога, оператор продвигает иглу, а стимулятор обеспечивает Исходный заряд. Если давление текучей среды превышает порог, игла может находиться на или в нерве. Следовательно, если давление текучей среды превышает порог, система прекращает исходную стимуляцию и переключается на стимуляцию с автоматически нарастающим электрическим импульсом в соответствии с используемым профилем заряда (это может быть профиль заряда, выбранный на этапе 810, или это может быть другой профиль заряда, как описано ниже на этапе 865).
[00111] Порог давления текучей среды может являться абсолютным значением (например, больше 200 мм рт.ст.) или относительным изменением в давлении, превышающем порог (например, изменение в давлении 80 мм рт.ст.). Следует понимать, что в зависимости от анатомического расположения, этот пороговый уровень давления может отличаться; однако обычно изменение давления находится в пределах от 50 мм рт.ст. до 150 мм рт.ст.
[00112] Этап 840: Система инициирует автоматически нарастающий электрический импульс, если давление текучей среды превышает порог. Во время автоматически нарастающего электрического импульса, система непрерывно изменяет мощность заряда от более низкой мощности к большее высокой мощности. Более высокая и более низкая мощности установлены профилем заряда. Дополнительно, промежуточные значения и количество промежуточных значений могут быть установлены профилем заряда. Например, в Целевом режиме 1 в таблице А профиль заряда демонстрирует минимальную или начальную мощность заряда для автоматически нарастающего электрического импульса, а также шесть шагов между минимальной и максимальной мощностью. После обеспечения заряда максимальной мощности системой, следующий заряд имеет минимальное значение. Таким образом, система обеспечивает последовательность зарядов, изменяющихся ступенчато от минимального до указанного максимального значения. Более конкретно, после обнаружения датчиком давления превышения давлением текучей среды заранее установленного порога (например, 80 мм рт.ст., повышение давления автоматически инициирует переключение от Исходного тока на автоматически нарастающий электрический импульс с инкрементально увеличивающимся зарядом 0,3 мА, до 0,4 мА, до 0,5 мА, до 0,7 мА, до 1,0 мА, до 1,5 мА, до 2,0 мА и заканчивая 2,5 мА.
[00113] Этап 850: Подобно этапу 825, обеспечивается определение, вызывает ли стимуляция с автоматически нарастающим электрическим импульсом моторный ответ или мышечную судорогу. Это может быть определено вручную путем наблюдения судороги оператором или автоматически, если система содержит датчик для определения судороги.
[00114] Этап 855: Если судорога не была обнаружена, оператор продолжает продвигать иглу, в то время как система обеспечивает стимуляцию с автоматически нарастающим электрическим импульсом, а оператор и/или система продолжает наблюдение на предмет судороги. Стимуляция с автоматически нарастающим электрическим импульсом может автоматически перезапускаться до тех пор, пока давления не останутся высокими, и может останавливаться при падении давления ниже порогового уровня давления, возвращаясь к этапу 820.
[00115] Этап 860: При обнаружении судороги система определяет, установлен ли заряд или профиль заряда на минимальный профиль заряда. Например, система может обнаруживать, установлен ли профиль заряда на «Поисковой» профиль, такой как Поиск 1, или установлен ли профиль заряда на «Целевой» профиль, такой как Целевой 1.
[00116] Этап 865: Если профиль заряда НЕ установлен на минимальное значение, то профиль заряда понижают до следующего профиля более низкого заряда. В описанном выше примере профиль заряда будет понижен с Поискового 1 до Целевого 1. Это изменение может быть произведено автоматически в ответ на ввод, относящийся к обнаружению мышечной судороги, или оператор может вручную осуществить изменение после наблюдения мышечной судороги и если оператор видит, что профиль заряда не установлен на профиль минимального заряда.
[00117] Этап 870: Если профиль заряда находится на минимальном значении и судорога была замечена, игла может находиться в нерве или рядом с ним. Если игла находится в нерве, инъекцию разовой дозы текучей среды осуществлять не стоит.Если игла находится в нерве, давление текучей среды будет высоким. Следовательно, перед тем, как разрешать инъекцию разовой дозы текучей среды, система определяет, не превышен ли порог давлением текучей среды.
[00118] Этап 875: Если давление текучей среды превышает порог, игла может находиться внутри нерва. Соответственно, игла следует быть отведена. Если игла находится внутри нерва, незначительное отведение иглы должно располагать иглу в подходящем месте. Следовательно, после отведения иглы способ может возвращаться к этапу 850, на котором обеспечивается автоматически нарастающий электрический импульс, и система/оператор осуществляет наблюдение на предмет мышечной судороги. Однако в некоторых случаях из соображений безопасности иглу следует отводить далее, чтобы возвращать способ на этап 820.
[00119] Этап 880: Если давление текучей среды ниже порога и мышечную судорогу наблюдают на низкой мощности заряда, что указывает на близкое расположение иглы к нерву, а низкое давление текучей среды указывает на расположение иглы за пределами нерва. Следовательно, разовая доза лекарственного средства может быть введена.
[00120] Как описано выше, способ обеспечивает возможность направления иглы к целевому нерву. В частности, способ обеспечивает предохранительный механизм для убеждения в том, что инъекция не осуществляется при интраневральном расположении иглы. Например, если система обнаруживает сигнал, указывающий на превышение порога давлением текучей среды, и сигнал, указывающий на вызванный моторный ответ в ответ на электрическую стимуляцию минимальной мощности, то система предоставит уведомление, предупреждение или сигнал и предотвратит дальнейшее вливание, что указывает на то, что игла находится внутри нерва. Как указано выше, сигнал, относящийся к вызванному моторному ответу, может быть предоставлен вручную оператором, или система может содержать детектор, обеспечивающий сигнал автоматически в ответ на вызванный моторный ответ. Дополнительно, система может быть выполнена с возможностью регулирования потока текучей среды таким образом, чтобы прекращать поток текучей среды к игле в ответ на сигналы, указывающие на высокое давление текучей среды и вызванный моторный ответ, вызванный минимальной стимуляцией нерва.
[00121] В предшествующем описании систему 610 используют для определения, находится ли игла внутри нерва, и, следовательно, предоставления указания оператору в случае, если игла находится внутри нерва. Дополнительно, система может регулировать поток текучей среды в ответ на определение нахождения иглы внутри нерва. В частности, система может предотвращать поток текучей среды при обнаружении нахождения конца иглы внутри нерва. Система определяет положение иглы в ответ на множество критериев. В частности, превышение порога давлением текучей среды и регистрируемая мышечная судорога в ответ на минимальную электрическую стимуляцию. В дополнение к обнаружению, находится ли конец иглы внутри нерва, как более подробно описано ниже, система может быть запрограммирована для обнаружения, находится ли конец иглы внутри плотной ткани, которая не является нервом.
[00122] Как указано выше, система 610 может содержать множество предварительных установок и/или программ. Оператор может инициировать процедуру идентификации плотной ткани, которая не является нервом, путем выбора сохраненного профиля, соответствующего такой процедуре. Подобно этапу 820 раскрытого выше способа, оператор продвигает иглу с использованием Исходной стимуляции. Если мышечная судорога была обнаружена, игла может находиться рядом с нервом. Следовательно, в ответ на обнаружение мышечной судороги положение иглы изменяют. Если давление текучей среды превышает порог, то игла, вероятно, находится в плотной ткани. Подобно этапу 840, если давление текучей среды превышает порог, обеспечивают начало автоматически нарастающего электрического импульса. Аналогично, при обнаружении мышечной судороги положение иглы изменяют. Если же давление текучей среды остается выше порога давления текучей среды и мышечная судорога не обнаружена в ответ на более сильную электрическую стимуляцию, то система может подавать сигнал, указывающий на то, что игла расположена в плотной ткани, которая не является нервом. Дополнительно, на этапе 840 обеспечивают автоматически нарастающий электрический импульс. Однако в этом режиме, в котором оператор пытается установить положение плотной ткани, которая не является нервом, профиль заряда может быть повышен до постоянного максимального значения, предназначенного для подтверждения того, что игла не находится рядом с нервом.
[00123] Таким образом, система получает критерии относительно давления текучей среды, уровня электрической стимуляции и вызова вызванного моторного ответа электрической стимуляцией. Система выполнена с возможностью определения, расположен ли конец иглы в или на плотной ткани, которая не является нервом, на основании этих критериев. Дополнительно, система может быть выполнена с возможностью регулирования потока текучей среды так, чтобы позволять осуществление инъекции только при удовлетворении трех критериев: давление текучей среды превышает порог, электрическая стимуляция превышает порог и мышечная судорога не обнаружена.
[00124] Специалистам в данной области техники будет понятно, что в описанных выше вариантах реализации могут быть осуществлены изменения и модификации без отклонения от широкого понимания идей изобретения. Например, в предшествующем описании система описана в контексте обеспечения инфузии текучей среды. Однако следует понимать, что система может быть использована для размещения иглы для аспирации ткани, наполненной текучей средой. Следовательно, следует понимать, что изобретение не ограничено конкретными вариантами реализации, описанными в настоящем документе, а подразумевает включение всех изменений и модификаций, находящихся в пределах объема и сущности изобретения, изложенного в формуле изобретения.
Реферат
Изобретение относится к медицине, а именно к системам для предоставления блокады периферического нерва пациенту. Система содержит иглу, насос текучей среды, контроллер, датчик для определения величины давления текучей среды в игле и проводящий элемент для обеспечения электрической стимуляции нерва на конце иглы. Насос текучей среды обеспечивает поток текучей среды к игле. Контроллер выполнен с возможностью управления насосом текучей среды для управления потоком текучей среды к игле. Контроллер выполнен с возможностью подачи изменяющейся электрической стимуляции в ответ на обнаружение датчиком величины давления текучей среды, превышающего первый порог. Контроллер выполнен с возможностью подачи постоянной стимуляции с исходным током, если обнаруженная величина давления текучей среды ниже первого порога. Достигается повышение безопасности, комфорта и точности размещения иглы при проведении блокады периферического нерва. 14 з.п. ф-лы, 3 табл., 8 ил.
Комментарии