Транспортное средство - RU2704774C1
Код документа: RU2704774C1
Чертежи





Описание
Область техники
Настоящее изобретение относится к транспортному средству.
Уровень техники
В публикации JP 2006-316644 A раскрыто традиционное транспортное средство, в котором, когда величина изменения расстояния от движущегося впереди транспортного средства становится предварительно определенной величиной или более, оценивается то, что движущееся впереди транспортное средство начинает движение, и двигатель внутреннего сгорания в режиме сокращения работы на холостом ходу принудительно автоматически повторно запускается. Вследствие этого, считается возможным принудительно плавно начинать движение рассматриваемого транспортного средства наряду с началом движения движущегося впереди транспортного средства.
Сущность изобретения
Тем не менее, иногда, например, когда рассматриваемое транспортное средство временно останавливается вследствие затора и т.д., движущееся впереди транспортное средство должно начинать движение (ускоряться), и величина изменения расстояния от движущегося впереди транспортного средства становится предварительно определенной величиной или более, затем движущееся впереди транспортное средство будет сразу полностью замедляться и останавливаться. Во время таких условий движения, даже при обращении внимания на начало движения движущегося впереди транспортного средства, некоторые водители могут не начинать движение рассматриваемого транспортного средства. Таким образом, в случае традиционного транспортного средства, поясненного выше, несмотря на отсутствие намерения у водителя начинать движение транспортного средства, двигатель внутреннего сгорания может принудительно повторно запускаться во время режима сокращения работы на холостом ходу наряду с началом движения движущегося впереди транспортного средства, и состояние холостого хода может в итоге продолжаться как есть, что приводит к ухудшению эффективности использования топлива.
Дополнительно, в случае электротранспортного средства, содержащего тяговый электромотор вместо двигателя внутреннего сгорания, можно приводить в действие тяговый электромотор заранее, чтобы инструктировать ему формировать движущую силу, соответствующую крутящему моменту при медленном движении, когда движущееся впереди транспортное средство начинает движение, и в силу этого принудительно плавно начинать движение рассматриваемого транспортного средства с отслеживанием начала движения движущегося впереди транспортного средства. Тем не менее, если тяговый электромотор в итоге продолжает приводиться в действие, несмотря на отсутствие намерения у водителя начинать движение транспортного средства, электрическая мощность бесполезно потребляется в то время, когда транспортное средство остановлено, так что эффективность использования электрической мощности с большой вероятностью ухудшается.
Настоящее изобретение осуществляется с акцентированием внимания на этой проблеме и имеет в качестве своей цели недопущение ухудшения эффективности использования топлива или эффективности использования электрической мощности.
Чтобы разрешать вышеуказанную проблему, транспортное средство согласно одному аспекту настоящего изобретения содержит приводной источник транспортного средства, устройство получения информации о движущемся впереди транспортном средстве, выполненное с возможностью получать информацию о движущемся впереди транспортном средстве, связанную с движущимся впереди транспортным средством, включающую в себя параметр, связанный с расстоянием между транспортными средствами, который становится тем больше, чем больше расстояние между рассматриваемым транспортным средством и движущимся впереди транспортным средством, и электронный блок управления, выполненный с возможностью управлять приводным источником транспортного средства. Дополнительно, двигатель внутреннего сгорания предоставляется в качестве приводного источника транспортного средства, и электронный блок управления имеет такую конфигурацию, в которой когда параметр становится первым предварительно определенным значением или более во время режима сокращения работы на холостом ходу, в котором двигатель внутреннего сгорания принудительно автоматически останавливается, он принудительно автоматически повторно запускает двигатель внутреннего сгорания, и такую конфигурацию, в которой если рассматриваемое транспортное средство продолжает остановку даже после принудительного автоматического повторного запуска двигателя внутреннего сгорания, он снова принудительно автоматически останавливает двигатель внутреннего сгорания, когда движущееся впереди транспортное средство остановлено до того, как параметр становится вторым предварительно определенным значением, большим первого предварительно определенного значения.
Дополнительно, транспортное средство согласно другому аспекту настоящего изобретения содержит приводной источник транспортного средства, устройство получения информации о движущемся впереди транспортном средстве, выполненное с возможностью получать информацию о движущемся впереди транспортном средстве, связанную с движущимся впереди транспортным средством, включающую в себя параметр, связанный с расстоянием между транспортными средствами, который становится тем больше, чем больше расстояние между рассматриваемым транспортным средством и движущимся впереди транспортным средством, и электронный блок управления, выполненный с возможностью управлять приводным источником транспортного средства. Дополнительно, тяговый электромотор предоставляется в качестве приводного источника транспортного средства, и электронный блок управления имеет такую конфигурацию, в которой когда параметр становится первым предварительно определенным значением или более в то время, когда транспортное средство остановлено, он приводит в действие тяговый электромотор, и такую конфигурацию, в которой если рассматриваемое транспортное средство продолжает остановку даже после приведения в действие тягового электромотора, он прекращает приведение в действие тягового электромотора, когда движущееся впереди транспортное средство остановлено до того, как параметр становится вторым предварительно определенным значением, большим первого предварительно определенного значения.
Согласно транспортным средствам согласно этим аспектам настоящего раскрытия сущности, можно не допускать ухудшения эффективности использования топлива или эффективности использования электрической мощности.
Краткое описание чертежей
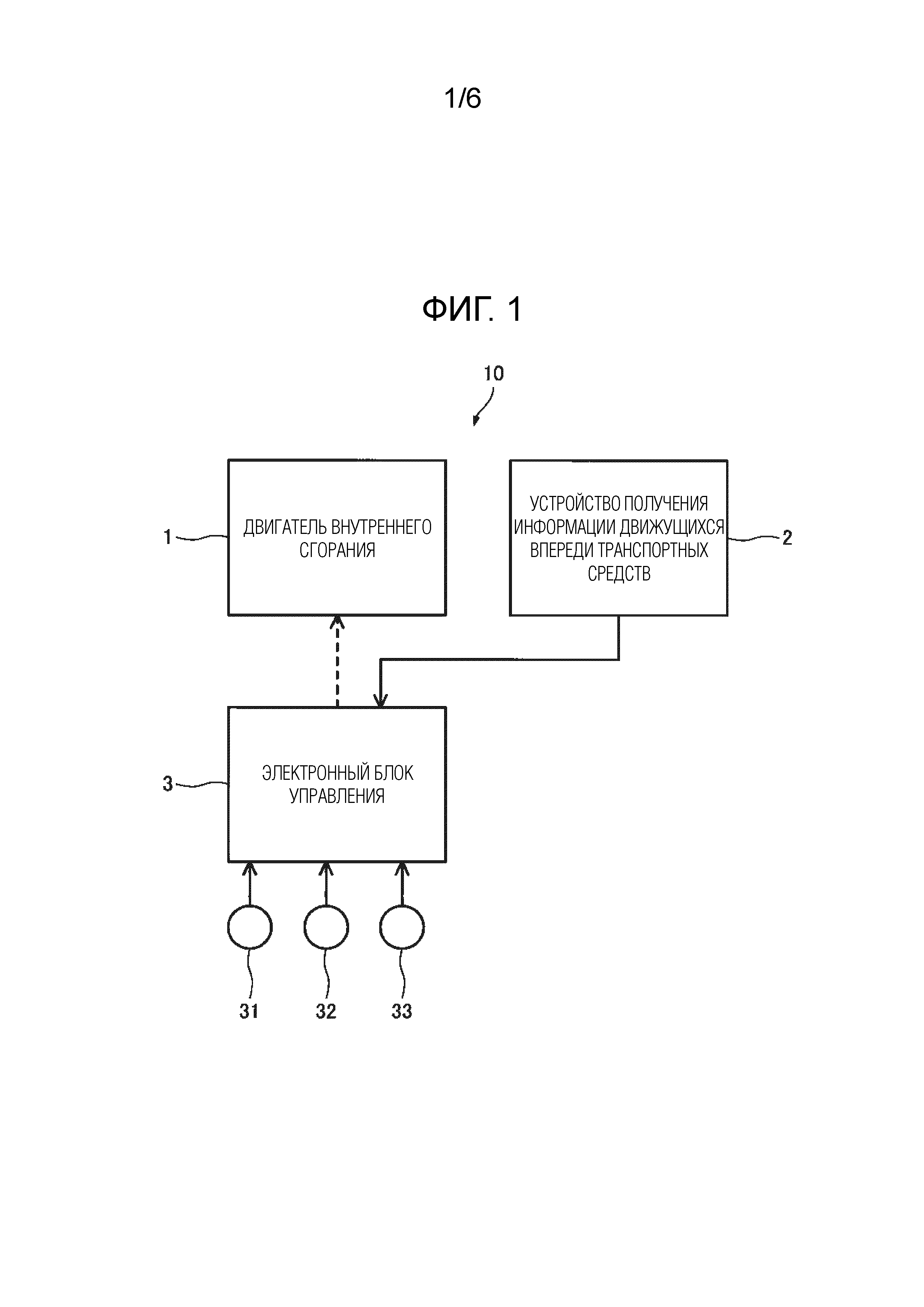
Фиг. 1 является схематичным видом конфигурации системы управления сокращением работы на холостом ходу в транспортном средстве согласно первому варианту осуществления настоящего раскрытия сущности.
Фиг. 2 является блок-схемой последовательности операций способа для пояснения управления сокращением работы на холостом ходу согласно первому варианту осуществления настоящего раскрытия сущности.
Фиг. 3 является временной диаграммой для пояснения работы при управлении сокращением работы на холостом ходу согласно первому варианту осуществления настоящего раскрытия сущности.
Фиг. 4 является блок-схемой последовательности операций способа для пояснения управления сокращением работы на холостом ходу согласно второму варианту осуществления настоящего раскрытия сущности.
Фиг. 5 является временной диаграммой для пояснения работы при управлении сокращением работы на холостом ходу согласно второму варианту осуществления настоящего раскрытия сущности.
Фиг. 6 является схематичным видом конфигурации системы управления сокращением работы на холостом ходу в транспортном средстве согласно модификации настоящего раскрытия сущности.
Подробное описание вариантов осуществления изобретения
Ниже, со ссылкой на чертежи, подробнее поясняются варианты осуществления настоящего раскрытия сущности. Следует отметить, что в нижеприведенном пояснении, аналогичным компонентам назначаются идентичные ссылочные обозначения.
Первый вариант осуществления
Фиг. 1 является схематичным видом конфигурации системы управления сокращением работы на холостом ходу в транспортном средстве 10 согласно первому варианту осуществления настоящего раскрытия сущности.
Транспортное средство 10 содержит двигатель 1 внутреннего сгорания в качестве приводного источника транспортного средства, устройство 2 получения информации о движущемся впереди транспортном средстве и электронный блок 3 управления.
Двигатель 1 внутреннего сгорания формирует движущую силу для приведения в движение транспортного средства 10.
Устройство 2 получения информации о движущемся впереди транспортном средстве представляет собой устройство, которое, например, получает расстояние между рассматриваемым транспортным средством и движущимся впереди транспортным средством либо параметр, связанный с расстоянием между транспортными средствами, который становится тем больше, чем больше расстояние между рассматриваемым транспортным средством и движущимся впереди транспортным средством, такой как расстояние движения движущегося впереди транспортного средства после того, как движущееся впереди транспортное средство начинает движение, и период времени движения движущегося впереди транспортного средства после того, как движущееся впереди транспортное средство начинает движение, или информацию, связанную с движущимся впереди транспортным средством, такую как скорость и ускорение движущегося впереди транспортного средства (ниже называется "информацией о движущемся впереди транспортном средстве"), и передает полученную информацию о движущемся впереди транспортном средстве в электронный блок 3 управления. В качестве такого устройства 2 получения информации о движущемся впереди транспортном средстве может упоминаться, например, радиолокационный датчик миллиметрового волнового диапазона или камера для захвата передней части рассматриваемого транспортного средства, устройство связи между транспортными средствами для связи между транспортными средствами с другим транспортным средством и т.д.
В настоящем варианте осуществления, радиолокационный датчик миллиметрового волнового диапазона используется в качестве устройства 2 получения информации о движущемся впереди транспортном средстве, расстояние от движущегося впереди транспортного средства и скорость и ускорение движущегося впереди транспортного средства вычисляются на основе отраженной волны миллиметрового волнового диапазона, возбуждаемой вперед относительно рассматриваемого транспортного средства, и они передаются как информация о движущемся впереди транспортном средстве в электронный блок 3 управления. Следует отметить, что устройство 2 получения информации о движущемся впереди транспортном средстве также может быть сконфигурировано посредством множества устройств, таких как вышеуказанный радиолокационный датчик миллиметрового волнового диапазона, камера и т.д.
Электронный блок 3 управления представляет собой микрокомпьютер, содержащий компоненты, соединенные друг с другом посредством двунаправленной шины, такие как центральный процессор (CPU), постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), порт ввода и порт вывода.
Электронный блок 3 управления выполнен с возможностью осуществлять управление, чтобы начинать режим сокращения работы на холостом ходу, в котором двигатель 1 внутреннего сгорания принудительно автоматически останавливается, когда предварительно определенное условие остановки двигателя действует, и принудительно автоматически повторно запускать двигатель 1 внутреннего сгорания, когда предварительно установленное условие повторного запуска двигателя действует (ниже называется "управлением сокращением работы на холостом ходу"). Электронный блок 3 управления принимает не только вышеуказанную информацию о движущемся впереди транспортном средстве, но также и информацию (сигналы) из различных датчиков, требуемую для управления сокращением работы на холостом ходу, таких как датчик 31 хода педали акселератора для определения величины нажатия педали акселератора (ниже называется "величиной нажатия педали акселератора"), датчик 32 хода тормоза для определения величины нажатия педали тормоза (ниже называется "величиной нажатия педали тормоза") и SOC-датчик 33 для определения величины заряда аккумулятора (не показан), смонтированного в транспортном средстве 10.
Ниже поясняется управление сокращением работы на холостом ходу согласно настоящему варианту осуществления, которое выполняет электронный блок 3 управления.
Если рассматриваемое транспортное средство временно останавливается вследствие красного сигнала светофора и т.д., иногда водитель не обращает внимания на начало движения движущегося впереди транспортного средства и медлит с началом движения рассматриваемого транспортного средства. В частности, при временной остановке в состоянии сокращения работы на холостом ходу, необходимо принудительно повторно запускать двигатель 1 внутреннего сгорания в состоянии сокращения работы на холостом ходу перед началом движения рассматриваемого транспортного средства, так что время от момента, когда водитель обращает внимание на начало движения движущегося впереди транспортного средства, до момента начала движения рассматриваемого транспортного средства становится большим, и рассматриваемое транспортное средство легко имеет большую задержку при начале движения. Такая задержка при начале движения транспортного средства 10 с большой вероятностью вызывает затор.
В качестве способа подавления такой задержки при начале движения транспортного средства 10, например, как показано в предшествующем уровне техники, описанном в PTL 1, описанном выше, может рассматриваться возможность оценивать то, что движущееся впереди транспортное средство начинает движение, и принудительно повторно запускать двигатель 1 внутреннего сгорания в состоянии сокращения работы на холостом ходу, когда величина изменения расстояния от движущегося впереди транспортного средства становится предварительно определенной величиной или более. Вследствие этого, можно начинать движение рассматриваемого транспортного средства сразу после того, как водитель обращает внимание на начало движения движущегося впереди транспортного средства, и в некоторых случаях, можно привлекать внимание водителя, чтобы инструктировать ему обращать внимание на начало движения движущегося впереди транспортного средства посредством шума или вибрации, вызываемой посредством повторного запуска двигателя 1 внутреннего сгорания.
Тем не менее, например, когда рассматриваемое транспортное средство временно останавливается вследствие затора и т.д., иногда движущееся впереди транспортное средство начинает движение (ускоряется), и величина изменения расстояния от движущегося впереди транспортного средства становится предварительно определенной величиной или более, затем движущееся впереди транспортное средство полностью сразу замедляется и останавливается. Во время таких условий движения, даже в случае обращения внимания на начало движения движущегося впереди транспортного средства, в зависимости от водителя, он может не начинать движение рассматриваемого транспортного средства. Таким образом, с помощью способа традиционного примера, поясненного выше, двигатель внутреннего сгорания может повторно запускаться наряду с началом движения движущегося впереди транспортного средства во время режима сокращения работы на холостом ходу, несмотря на отсутствие намерения у водителя начинать движение транспортного средства, и состояние холостого хода может в итоге продолжаться как есть. Эффективность использования топлива в силу этого с большой вероятностью ухудшается.
Следовательно, в настоящем варианте осуществления, определено, что когда расстояние от движущегося впереди транспортного средства становится предварительно определенным первым расстоянием A1 или более во время режима сокращения работы на холостом ходу, двигатель 1 внутреннего сгорания должен принудительно повторно запускаться однократно, с тем чтобы подавлять задержку при начале движения транспортного средства. Дополнительно, определено, что когда рассматриваемое транспортное средство продолжает быть остановленным даже после принудительного повторного запуска двигателя 1 внутреннего сгорания, и движущееся впереди транспортное средство остановлено до того, как расстояние от движущегося впереди транспортного средства становится предварительно определенным вторым расстоянием B1, большим первого расстояния A1, должно оцениваться то, что водитель не намеревается начинать движение рассматриваемого транспортного средства, и то, что для того, чтобы не допускать ухудшения эффективности использования топлива, двигатель 1 внутреннего сгорания должен принудительно автоматически останавливаться и возвращаться в состояние сокращения работы на холостом ходу.
Фиг. 2 является блок-схемой последовательности операций способа для пояснения управления сокращением работы на холостом ходу согласно настоящему варианту осуществления. Электронный блок 3 управления многократно выполняет настоящую процедуру в ходе работы транспортного средства 10 в предварительно определенном периоде обработки.
На этапе S1, электронный блок 3 управления оценивает то, задан или нет флаг F2 равным 1. Флаг F2 представляет собой флаг, который задается равным 1, когда во время режима сокращения работы на холостом ходу расстояние между транспортными средствами становится первым расстоянием A1 или более, двигатель 1 внутреннего сгорания повторно запускается, в таком случае до того, как расстояние между транспортными средствами становится вторым расстоянием B1, движущееся впереди транспортное средство останавливается, и происходит возврат в состояние сокращения работы на холостом ходу. Начальное значение флага F2 задается равным 0. Электронный блок 3 управления переходит к обработке этапа S2, если флаг F2 равен 0. С другой стороны, электронный блок 3 управления переходит к обработке этапа S16, если флаг F2 равен 1.
На этапе S2, электронный блок 3 управления оценивает то, задается или нет флаг F1 равным 1. Флаг F1 представляет собой флаг, который задается равным 1, когда во время режима сокращения работы на холостом ходу расстояние между транспортными средствами становится первым расстоянием A1 или более, и двигатель 1 внутреннего сгорания повторно запускается. Начальное значение флага F1 задается равным 0. Электронный блок 3 управления переходит к обработке этапа S3, если флаг F1 равен 0. С другой стороны, электронный блок 3 управления переходит к обработке этапа 11, если флаг F1 равен 1.
На этапе S3, электронный блок 3 управления оценивает то, работает или нет двигатель в режиме сокращения работы на холостом ходу. Электронный блок 3 управления переходит к обработке этапа S4, если двигатель не находится в режиме сокращения работы на холостом ходу. С другой стороны, электронный блок 3 управления переходит к обработке этапа S6, если двигатель находится в режиме сокращения работы на холостом ходу.
На этапе S4, электронный блок 3 управления оценивает то, действует или нет условие остановки двигателя. Электронный блок 3 управления переходит к обработке этапа S5, если условие остановки двигателя действует. С другой стороны, электронный блок 3 управления завершает текущую обработку, если условие остановки двигателя не действует.
Следует отметить, что в качестве условия остановки двигателя может упоминаться, например, скорость рассматриваемого транспортного средства (скорость транспортного средства), равная 0 км/ч, нажатие педали тормоза (т.е. величина нажатия педали тормоза, составляющая определенную величину или более), ненажатие педали акселератора (т.е. величина нажатия педали акселератора, равная нулю) и величина заряда аккумулятора, составляющая предварительно определенную величину или более, и т.д.
На этапе S5, электронный блок 3 управления принудительно автоматически останавливает двигатель 1 внутреннего сгорания. Вследствие этого, можно улучшать эффективность использования топлива, выбросы выхлопных газов и рабочие характеристики звука и вибрации в то время, когда транспортное средство временно остановлено, к примеру, вследствие красного сигнала светофора или затора и т.д.
На этапе S6, например, если водитель намеревается начинать движение рассматриваемого транспортного средства и т.д., электронный блок 3 управления оценивает то, действует или нет условие повторного запуска двигателя, отличное от условия повторного запуска двигателя согласно настоящему варианту осуществления, поясненного на этапе S8 или этапе S19 (ниже называется "условием нормального повторного запуска"). Электронный блок 3 управления переходит к обработке этапа S7, если условие нормального повторного запуска действует. С другой стороны, электронный блок 3 управления переходит к обработке этапа S8, если условие нормального повторного запуска не действует.
Следует отметить, что в качестве условия нормального повторного запуска может упоминаться, например, ненажатие педали тормоза (т.е. величина нажатия педали тормоза, равная нулю), нахождение рычага переключения передач в диапазоне приведения в движение (например, в D-диапазоне или R-диапазоне) и т.д.
На этапе S7, электронный блок 3 управления принудительно автоматически повторно запускает двигатель 1 внутреннего сгорания.
На этапе S8, электронный блок 3 управления оценивает то, имеется или нет вероятность того, что водитель не обращает внимания на начало движения движущегося впереди транспортного средства. В частности, электронный блок 3 управления оценивает то, составляет либо нет расстояние между транспортными средствами предварительно определенное первое расстояние A1 или более. Первое расстояние A1 представляет собой расстояние между транспортными средствами, считающееся достаточным для того, чтобы начинать движение рассматриваемого транспортного средства в нормальных условиях движения, в которых затор не возникает. Первое расстояние A1 может представлять собой фиксированное значение, заданное заранее, или может задаваться изменяемым согласно предпочтению водителя.
Электронный блок 3 управления оценивает то, что имеется вероятность того, что водитель не обращает внимания на начало движения движущегося впереди транспортного средства, и переходит к обработке этапа S9, если расстояние между транспортными средствами составляет первое расстояние A1 или более. С другой стороны, электронный блок 3 управления завершает текущую обработку и продолжает режим сокращения работы на холостом ходу, если расстояние между транспортными средствами меньше первого расстояния A1.
На этапе S9, поскольку имеется вероятность того, что водитель не обращает внимания на начало движения движущегося впереди транспортного средства, электронный блок 3 управления, принудительно автоматически повторно запускает двигатель 1 внутреннего сгорания, даже если условие нормального повторного запуска не действует, с тем чтобы не допускать задержки рассматриваемого транспортного средства при начале движения. Вследствие этого, можно начинать движение рассматриваемого транспортного средства сразу после того, как водитель обращает внимание на начало движения движущегося впереди транспортного средства, и в некоторых случаях, можно привлекать внимание водителя, чтобы инструктировать ему обращать внимание на начало движения движущегося впереди транспортного средства посредством шума или вибрации, вызываемой посредством повторного запуска двигателя 1 внутреннего сгорания.
Следует отметить, что при принудительном повторном запуске двигателя 1 внутреннего сгорания наряду с началом движения движущегося впереди транспортного средства таким образом, при принудительном повторном запуске двигателя 1 внутреннего сгорания или до этого, можно информировать водителя в отношении начала движения движущегося впереди транспортного средства, например, посредством издавания звука зуммера либо отображения текстовой информации или графической информации для передачи факта начала движения движущегося впереди транспортного средства на дисплее, смонтированном в транспортном средстве. Вследствие этого, можно более надежно уведомлять водителя в отношении начала движения движущегося впереди транспортного средства.
Дополнительно, при решении всегда информировать водителя в отношении начала движения движущегося впереди транспортного средства при принудительном повторном запуске двигателя 1 внутреннего сгорания или до этого, например, когда зуммер неисправен, либо некоторая другая причина приводит к тому, что он более не может информировать водителя в отношении начала движения движущегося впереди транспортного средства, также можно не запускать повторно двигатель 1 внутреннего сгорания принудительно, а продолжать режим сокращения работы на холостом ходу до тех пор, пока условие нормального повторного запуска не будет действовать.
На этапе S10, электронный блок 3 управления задает флаг F1 равным 1.
На этапе S11, электронный блок 3 управления оценивает то, продолжает или нет рассматриваемое транспортное средство быть остановленным даже после того, как расстояние между транспортными средствами становится первым расстоянием A1 или более.
Электронный блок 3 управления переходит к обработке этапа S12, если рассматриваемое транспортное средство остановлено. С другой стороны, электронный блок 3 управления переходит к обработке этапа S15 и возвращает флаг F1 на 0, с тем чтобы принудительно автоматически останавливать двигатель 1 внутреннего сгорания, как обычно, когда условие остановки двигателя в дальнейшем действует, если рассматриваемое транспортное средство движется.
На этапе S12, электронный блок 3 управления оценивает то, имеется или нет вероятность того, что водитель не начинает движение рассматриваемого транспортного средства в зависимости от условий движения. В частности, электронный блок 3 управления оценивает то, меньше или нет расстояние между транспортными средствами предварительно определенного второго расстояния B1, большего первого расстояния A1, и то, остановлено или нет движущееся впереди транспортное средство. Таким образом, электронный блок 3 управления оценивает то, остановлено или нет движущееся впереди транспортное средство до того, как расстояние между транспортными средствами становится вторым расстоянием B1, если рассматриваемое транспортное средство продолжает быть остановленным даже после того, как расстояние между транспортными средствами становится первым расстоянием A1 или более, и двигатель 1 внутреннего сгорания принудительно повторно запускается. Второе расстояние B1, при рассмотрении движущегося сзади транспортного средства, представляет собой расстояние между транспортными средствами, считающееся достаточным для того, чтобы начинать движение рассматриваемого транспортного средства независимо от условий движения. Второе расстояние B1 может представлять собой фиксированное значение, заданное заранее, или может задаваться изменяемым согласно предпочтению водителя.
Электронный блок 3 управления оценивает то, имеется или нет вероятность того, что водитель не обращает внимания на начало движения движущегося впереди транспортного средства, или того, что водитель не начинает движение рассматриваемого транспортного средства вследствие условий движения, и переходит к обработке этапа S13, если расстояние между транспортными средствами меньше второго расстояния B1, и движущееся впереди транспортное средство остановлено. С другой стороны, электронный блок 3 управления завершает текущую обработку и поддерживает состояние холостого хода как есть при подготовке к началу движения рассматриваемого транспортного средства, поскольку расстояние между транспортными средствами составляет второе расстояние B1 или более, либо имеется вероятность того, что водитель начинает движение рассматриваемого транспортного средства, если движущееся впереди транспортное средство движется.
На этапе S13, электронный блок 3 управления принудительно автоматически останавливает двигатель 1 внутреннего сгорания и возвращается в состояние сокращения работы на холостом ходу. Вследствие этого, можно не допускать повторного запуска двигателя 1 внутреннего сгорания наряду с началом движения движущегося впереди транспортного средства в то время, когда рассматриваемое транспортное средство остановлено, несмотря на отсутствие намерения у водителя начинать движение транспортного средства, и не допускать в итоге продолжения состояния холостого хода как есть. Таким образом, можно снова принудительно автоматически останавливать двигатель 1 внутреннего сгорания и возвращаться в состояние сокращения работы на холостом ходу надлежащим образом в соответствии с условиями движения, когда двигатель 1 внутреннего сгорания повторно запускается наряду с началом движения движущегося впереди транспортного средства в то время, когда рассматриваемое транспортное средство остановлено. Следовательно, можно не допускать ухудшения эффективности использования топлива и выбросов выхлопных газов, и рабочих характеристик шума и вибрации в то время, когда транспортное средство остановлено.
На этапе S14, электронный блок 3 управления возвращает флаг F1 на 0 и задает флаг F2 равным 1.
На этапе S15, электронный блок 3 управления возвращает флаг F1 на 0, с тем чтобы обеспечивать возможность двигателю 1 внутреннего сгорания принудительно автоматически останавливаться, как обычно, когда условие остановки двигателя в дальнейшем действует.
На этапе S16, электронный блок 3 управления оценивает то, действует или нет условие нормального повторного запуска.
Электронный блок 3 управления переходит к обработке этапа S17, если условие нормального повторного запуска действует. С другой стороны, электронный блок 3 управления переходит к обработке этапа S19, если условие нормального повторного запуска не действует.
На этапе S17, электронный блок 3 управления принудительно автоматически повторно запускает двигатель 1 внутреннего сгорания.
На этапе S18, электронный блок 3 управления возвращает флаг F2 на 0, чтобы обеспечивать возможность двигателю 1 внутреннего сгорания принудительно автоматически останавливаться, как обычно, когда условие остановки двигателя в дальнейшем действует.
На этапе S19, электронный блок 3 управления оценивает то, представляет собой состояние, несмотря на условия движения, состояние, в котором двигатель 1 внутреннего сгорания должен повторно запускаться, и рассматриваемое транспортное средство должно начинать движение. В частности, электронный блок 3 управления оценивает то, становится или нет расстояние между транспортными средствами вторым расстоянием B1 или более. Электронный блок 3 управления оценивает то, что состояние представляет собой состояние, в котором двигатель 1 внутреннего сгорания должен повторно запускаться, и рассматриваемое транспортное средство должно начинать движение независимо от условий движения, и переходит к обработке этапа S21, если расстояние между транспортными средствами составляет второе расстояние B1 или более. С другой стороны, электронный блок 3 управления продолжает режим сокращения работы на холостом ходу до тех пор, пока условие нормального повторного запуска не будет действовать, если расстояние между транспортными средствами меньше второго расстояния B1, с тем чтобы подавлять ухудшение эффективности использования топлива в максимально возможной степени.
На этапе S20, электронный блок 3 управления принудительно повторно запускает двигатель 1 внутреннего сгорания, с тем чтобы подготавливаться к началу движения рассматриваемого транспортного средства, поскольку считается, что рассматриваемое транспортное средство должно начинать движение независимо от условий движения. Вследствие этого, когда водитель не обращает внимания на начало движения движущегося впереди транспортного средства, можно начинать движение рассматриваемого транспортного средства сразу после того, как водитель обращает внимание на начало движения движущегося впереди транспортного средства, и в некоторых случаях, можно привлекать внимание водителя, чтобы инструктировать ему обращать внимание на начало движения движущегося впереди транспортного средства посредством шума или вибрации, вызываемой посредством повторного запуска двигателя 1 внутреннего сгорания. По этой причине, можно не допускать становления расстояния между транспортными средствами большим второго расстояния B1 или более, и можно подавлять ухудшающийся затор.
Следует отметить, что даже при принудительном повторном запуске двигателя 1 внутреннего сгорания, водитель может не обращать внимание на начало движения движущегося впереди транспортного средства в некоторых случаях, так что при принудительном повторном запуске двигателя 1 внутреннего сгорания на этапе S20, как пояснено выше, при принудительном повторном запуске двигателя 1 внутреннего сгорания или до этого, желательно информировать водителя в отношении начала движения движущегося впереди транспортного средства, например, посредством издавания звука зуммера. Вследствие этого, можно надежно инструктировать водителю обращать внимание на начало движения движущегося впереди транспортного средства, и можно эффективнее подавлять ухудшающийся затор.
Дополнительно, на блок-схеме последовательности операций способа по фиг. 2, на этапе S8 либо этапе S12 и этапе S19, расстояние между транспортными средствами использовано в качестве параметра, связанного с расстоянием между транспортными средствами, но вместо расстояния между транспортными средствами, также можно использовать расстояние движения движущегося впереди транспортного средства после того, как движущееся впереди транспортное средство начинает движение, или период времени движения движущегося впереди транспортного средства после того, как движущееся впереди транспортное средство начинает движение, с тем чтобы оценивать то, до какой степени движущееся впереди транспортное средство отъехало от рассматриваемого транспортного средства. В частности, например, на этапе S8, можно оценивать то, составляет либо нет расстояние движения движущегося впереди транспортного средства предварительно определенное первое расстояние A2 или более. Первое расстояние A2 соответствует первому расстоянию A1 минус расстояние между рассматриваемым транспортным средством и движущимся впереди транспортным средством до того, как движущееся впереди транспортное средство начинает движение. Дополнительно, на этапе S8, также можно оценивать то, составляет либо период времени движения движущегося впереди транспортного средства предварительно определенный период времени A3 или более.
Фиг. 3 является временной диаграммой для пояснения работы при управлении сокращением работы на холостом ходу согласно настоящему варианту осуществления.
Движущееся впереди транспортное средство временно останавливается перед временем t1, начинает движение во время t1, затем ускоряется вплоть до времени t2. От времени t2 до времени t3, оно приводится в движение на одинаковой скорости. От времени t3, оно замедляется, и во время t5, оно дополнительно временно остановлено. Дополнительно, оно снова начинает движение во время t6.
Рассматриваемое транспортное средство, перед временем t1, временно останавливается, аналогично движущемуся впереди транспортному средству, и находится в режиме сокращения работы на холостом ходу. Во время режима сокращения работы на холостом ходу до тех пор, пока расстояние между транспортными средствами не станет первым расстоянием A1 или более, например, величина нажатия педали тормоза становится нулевой и т.д. По существу, режим сокращения работы на холостом ходу продолжается до тех пор, пока водитель не намеревается начинать движение транспортного средства 10. На этой временной диаграмме, педаль тормоза также нажимается от времени t1 и далее. До времени 4, расстояние между транспортными средствами также меньше первого расстояния A1, так что вплоть до времени t4, продолжается режим сокращения работы на холостом ходу.
Если, во время t4, во время режима сокращения работы на холостом ходу, расстояние между транспортными средствами становится первым расстоянием A1 или более, оценивается то, что имеется вероятность того, что водитель не обращает внимания на начало движения движущегося впереди транспортного средства. Чтобы не допускать задержки рассматриваемого транспортного средства при начале движения, двигатель 1 внутреннего сгорания автоматически повторно запускается.
Дополнительно, таким образом, при принудительном автоматическом повторном запуске двигателя 1 внутреннего сгорания, поскольку расстояние между транспортными средствами становится первым расстоянием A1 или более, когда рассматриваемое транспортное средство продолжает быть остановленным, в зависимости от условий движения, водитель не может начинать движение рассматриваемого транспортного средства, так что оценивается то, остановлено или нет движущееся впереди транспортное средство до того, как расстояние между транспортными средствами становится вторым расстоянием B1.
На этой временной диаграмме, во время t5, до того, как расстояние между транспортными средствами становится вторым расстоянием B1, движущееся впереди транспортное средство остановлено, так что в момент времени t5, оценивается то, что водитель не начинает движение рассматриваемого транспортного средства вследствие условий движения, двигатель 1 внутреннего сгорания принудительно автоматически останавливается, и происходит возврат в состояние сокращения работы на холостом ходу. Вследствие этого, можно не допускать повторного запуска двигателя внутреннего сгорания наряду с началом движения движущегося впереди транспортного средства в то время, когда рассматриваемое транспортное средство остановлено, несмотря на отсутствие намерения у водителя начинать движение транспортного средства, и не допускать в итоге продолжения состояния холостого хода как есть, так что можно не допускать ухудшения эффективности использования топлива и выбросов выхлопных газов, и рабочих характеристик шума и вибрации в то время, когда транспортное средство остановлено.
Во время t5 и далее, если условие нормального повторного запуска действует, двигатель 1 внутреннего сгорания принудительно автоматически повторно запускается. Дополнительно, если, как на этой временной диаграмме, условие нормального повторного запуска не действует, когда во время t7 расстояние между транспортными средствами становится вторым расстоянием B1 или более, двигатель 1 внутреннего сгорания принудительно автоматически повторно запускается.
Транспортное средство 10, согласно настоящему варианту осуществления поясненное выше, содержит двигатель 1 внутреннего сгорания в качестве приводного источника транспортного средства, устройство 2 получения информации о движущемся впереди транспортном средстве, выполненное с возможностью получать информацию о движущемся впереди транспортном средстве, связанную с движущимся впереди транспортным средством, включающую в себя расстояние между транспортными средствами (параметр, связанный с расстоянием между транспортными средствами, который становится тем больше, чем больше расстояние между рассматриваемым транспортным средством и движущимся впереди транспортным средством), и электронный блок 3 управления, выполненный с возможностью управлять приводным источником транспортного средства.
Дополнительно, электронный блок 3 управления имеет такую конфигурацию, в которой когда расстояние между транспортными средствами становится первым расстоянием A1 (первым предварительно определенным значением) или более во время режима сокращения работы на холостом ходу, в котором двигатель 1 внутреннего сгорания принудительно автоматически останавливается, двигатель 1 внутреннего сгорания принудительно автоматически повторно запускается, и такую конфигурацию, в которой когда рассматриваемое транспортное средство продолжает быть остановленным даже после того, как двигатель 1 внутреннего сгорания принудительно автоматически повторно запускается, двигатель 1 внутреннего сгорания снова принудительно автоматически останавливается, когда движущееся впереди транспортное средство останавливается, до того, как расстояние между транспортными средствами становится вторым расстоянием B1 (вторым предварительно определенным значением), большим первого расстояния A1.
Вследствие этого, можно не допускать повторного запуска двигателя внутреннего сгорания наряду с началом движения движущегося впереди транспортного средства в то время, когда рассматриваемое транспортное средство остановлено, несмотря на отсутствие намерения у водителя начинать движение транспортного средства, и не допускать в итоге продолжения состояния холостого хода как есть. Таким образом, можно снова принудительно автоматически останавливать двигатель внутреннего сгорания и возвращаться в состояние сокращения работы на холостом ходу надлежащим образом в соответствии с условиями движения, когда двигатель внутреннего сгорания повторно запускается наряду с началом движения движущегося впереди транспортного средства в то время, когда рассматриваемое транспортное средство остановлено. Следовательно, можно не допускать ухудшения эффективности использования топлива и выбросов выхлопных газов, и рабочих характеристик шума и вибрации в то время, когда транспортное средство остановлено.
Дополнительно, электронный блок 3 управления согласно настоящему варианту осуществления дополнительно выполнен с возможностью принудительно автоматически повторно запускать двигатель 1 внутреннего сгорания, когда расстояние между транспортными средствами становится вторым расстоянием B1 (вторым предварительно определенным значением) или более при принудительной автоматической остановке двигателя 1 внутреннего сгорания снова.
Вследствие этого, когда водитель не обращает внимания на начало движения движущегося впереди транспортного средства, можно начинать движение рассматриваемого транспортного средства сразу после того, как водитель обращает внимание на начало движения движущегося впереди транспортного средства, и в некоторых случаях, можно привлекать внимание водителя, чтобы инструктировать ему обращать внимание на начало движения движущегося впереди транспортного средства посредством шума или вибрации, вызываемой посредством повторного запуска двигателя 1 внутреннего сгорания. Следовательно, можно не допускать продолжения режима сокращения работы на холостом ходу без обращения внимания на начало движения движущегося впереди транспортного средства и не допускать задержки начала движения рассматриваемого транспортного средства при начале движения рассматриваемого транспортного средства, и можно не допускать становления расстояния между транспортными средствами большим второго расстояния B1 или более. Дополнительно, вследствие этого, ухудшение затора может подавляться.
Второй вариант осуществления
Далее поясняется второй вариант осуществления настоящего раскрытия сущности. Настоящий вариант осуществления отличается от первого варианта осуществления в аспекте принудительного повторного запуска двигателя 1 внутреннего сгорания согласно тому, начинает или нет движущееся впереди транспортное средство движение, когда расстояние между транспортными средствами меньше второго расстояния B1, и двигатель 1 внутреннего сгорания автоматически останавливается и переходит в режим сокращения работы на холостом ходу. Ниже в пояснении рассматривается этот отличающийся аспект.
Фиг. 4 является блок-схемой последовательности операций способа для пояснения управления сокращением работы на холостом ходу согласно настоящему варианту осуществления. Электронный блок 3 управления многократно выполняет настоящую процедуру посредством предварительно определенного периода обработки в ходе работы транспортного средства 10.
На фиг. 4, контент обработки от этапа S1 до этапа 18 является аналогичным первому варианту осуществления, так что пояснения опускаются здесь.
На этапе S30, электронный блок 3 управления оценивает то, начинает или нет движущееся впереди транспортное средство движение. Электронный блок 3 управления переходит к обработке этапа S31, если движущееся впереди транспортное средство начинает движение. С другой стороны, электронный блок 3 управления инструктирует продолжение режима сокращения работы на холостом ходу, с тем чтобы не допускать ухудшения эффективности использования топлива, если движущееся впереди транспортное средство остановлено.
На этапе S31, электронный блок 3 управления оценивает то, что имеется высокая вероятность того, что водитель начинает движение рассматриваемого транспортного средства, когда движущееся впереди транспортное средство, которое остановлено в состоянии с расстоянием между транспортными средствами первого расстояния A1, меньшим второго расстояния B1, начинает движение, и принудительно повторно запускает двигатель 1 внутреннего сгорания, с тем чтобы подготавливаться к началу движения рассматриваемого транспортного средства.
Фиг. 5 является временной диаграммой для пояснения работы при управлении сокращением работы на холостом ходу согласно настоящему варианту осуществления.
Работа при управлении сокращением работы на холостом ходу вплоть до времени t5 является аналогичной первому варианту осуществления.
Дополнительно, в вышеуказанном первом варианте осуществления, во время t5 и далее, когда расстояние между транспортными средствами становится вторым расстоянием B1 или более во время t7, двигатель 1 внутреннего сгорания принудительно автоматически повторно запускается, но, как показано на фиг. 5, в настоящем варианте осуществления, двигатель 1 внутреннего сгорания принудительно автоматически повторно запускается, когда движущееся впереди транспортное средство начинает движение, во время t6.
Электронный блок 3 управления, согласно настоящему варианту осуществления, поясненный выше, аналогично первому варианту осуществления, выполнен с возможностью принудительно автоматически повторно запускать двигатель 1 внутреннего сгорания, когда расстояние между транспортными средствами становится первым расстоянием A1 (первым предварительно определенным значением) или более во время режима сокращения работы на холостом ходу, в котором двигатель 1 внутреннего сгорания принудительно автоматически останавливается, и снова принудительно автоматически останавливать двигатель 1 внутреннего сгорания, до того, ка расстояние между транспортными средствами становится вторым расстоянием B1 (вторым предварительно определенным значением), большим первого расстояния A1, когда рассматриваемое транспортное средство продолжает быть остановленным даже после принудительного автоматического повторного запуска двигателя 1 внутреннего сгорания.
Дополнительно, электронный блок 3 управления согласно настоящему варианту осуществления дополнительно выполнен с возможностью автоматически принудительно повторно запускать двигатель 1 внутреннего сгорания, когда движущееся впереди транспортное средство начинает движение, в случае снова принудительной автоматической остановки двигателя 1 внутреннего сгорания.
Вследствие этого, когда водитель не обращает внимания на начало движения движущегося впереди транспортного средства, можно начинать движение рассматриваемого транспортного средства сразу после обращения внимания на начало движения движущегося впереди транспортного средства, и в некоторых случаях, можно привлекать внимание водителя, чтобы инструктировать ему обращать внимание на начало движения движущегося впереди транспортного средства посредством шума или вибрации, вызываемой посредством повторного запуска двигателя 1 внутреннего сгорания. По этой причине, можно не допускать продолжения режима сокращения работы на холостом ходу в то время, когда не обращается внимание на начало движения движущегося впереди транспортного средства, и не допускать в итоге задержки начала движения рассматриваемого транспортного средства при начале его движения. Как результат, можно не допускать ухудшения затора.
Выше пояснены варианты осуществления настоящего раскрытия сущности, но варианты осуществления показывают только часть примеров применения настоящего раскрытия сущности и не имеют намерение ограничивать объем настоящего раскрытия сущности конкретными конфигурациями вариантов осуществления.
Например, как показано на фиг. 6, в случае транспортного средства 10, содержащего тяговый электромотор 4 в дополнение к двигателю 1 внутреннего сгорания в качестве приводного источника транспортного средства (например, гибридного транспортного средства или гибридного транспортного средства со штепсельным соединением для заряда от внешнего источника), вместо принудительного повторного запуска двигателя 1 внутреннего сгорания на этапе S7 или этапе S9, этапе S17, этапе S20 и этапе S31 на блок-схемы последовательности операций способа по фиг. 2 и фиг. 4, также можно использовать тяговый электромотор 4 для того, чтобы формировать движущую силу, соответствующую крутящему моменту при медленном движении, по мере необходимости. Дополнительно, при использовании тягового электромотора 4 для того, чтобы формировать движущую силу, соответствующую крутящему моменту при медленном движении вместо принудительного повторного запуска двигателя 1 внутреннего сгорания, также можно прекращать приведение в действие тягового электромотора 4 на этапе S13 блок-схем последовательности операций способа по фиг. 2 и фиг. 4.
Таким образом, электронный блок 3 управления может быть выполнен с возможностью принудительно автоматически повторно запускать двигатель 1 внутреннего сгорания, когда расстояние между транспортными средствами (параметр) становится первым расстоянием A1 (первым предварительно определенным значением) или более во время режима сокращения работы на холостом ходу, в котором двигатель 1 внутреннего сгорания принудительно автоматически останавливается, или, альтернативно, с тем чтобы прекращать приведение в действие тягового электромотора 4, когда движущееся впереди транспортное средство останавливается, до того, как расстояние между транспортными средствами становится вторым расстоянием B1 (вторым предварительно определенным значением) при приведении в действие тягового электромотора 4, и рассматриваемое транспортное средство продолжает остановку даже после приведения в действие тягового электромотора 4. Вследствие этого, можно не допускать бесполезного потребления электрической мощности в то время, когда транспортное средство остановлено, так что можно подавлять ухудшение эффективности использования электрической мощности.
Следует отметить, что вместо принудительного повторного запуска двигателя 1 внутреннего сгорания таким образом, при инструктировании тяговому электромотору 4 формировать движущую силу, соответствующую крутящему моменту при медленном движении, в отличие от случая повторного запуска двигателя 1 внутреннего сгорания, шум или вибрация почти не формируется, так что невозможно использовать шум или вибрацию, вызываемую посредством повторного запуска двигателя 1 внутреннего сгорания, чтобы привлекать внимание водителя к ситуации впереди. Следовательно, желательно информировать водителя в отношении факта начала движения движущегося впереди транспортного средства, например, посредством зуммера и т.д., как пояснено выше. Дополнительно, поскольку затруднительно привлекать внимание водителя к ситуации впереди по сравнению с повторным запуском двигателя 1 внутреннего сгорания, для того, чтобы надежно информировать водителя в отношении начала движения движущегося впереди транспортного средства, также можно задавать звук зуммера более сильным, чем звук зуммера при принудительном повторном запуске двигателя 1 внутреннего сгорания.
Дополнительно, хотя не показано, в случае транспортного средства 10, содержащего тяговый электромотор 4 вместо двигателя 1 внутреннего сгорания в качестве приводного источника транспортного средства (например, электротранспортного средства), электронный блок 3 управления может быть выполнен с возможностью приводить в действие тяговый электромотор 4 для того, чтобы инструктировать ему формировать движущую силу, соответствующую крутящему моменту при медленном движении, когда расстояние между транспортными средствами (параметр) становится первым расстоянием A1 (первым предварительно определенным значением) в то время, когда рассматриваемое транспортное средство остановлено, и прекращать приведение в действие тягового электромотора 4, когда движущееся впереди транспортное средство останавливается, до того, как расстояние между транспортными средствами становится вторым расстоянием B1 (вторым предварительно определенным значением), когда рассматриваемое транспортное средство продолжает остановку даже после приведения в действие тягового электромотора 4. Вследствие этого, можно не допускать бесполезного потребления электрической мощности в то время, когда транспортное средство остановлено, так что можно подавлять ухудшение эффективности использования электрической мощности.
Дополнительно, в вышеописанных вариантах осуществления, расстояние от движущегося впереди транспортного средства или расстояние движения или период времени движения вычислены на основе отраженной волны миллиметрового волнового диапазона, возбуждаемой из радиолокационного датчика миллиметрового волнового диапазона вперед относительно рассматриваемого транспортного средства, но, например, также можно оценивать их из информации скорости и т.д. движущегося впереди транспортного средства, полученной через устройство связи между транспортными средствами.
Реферат
Транспортное средство (10) содержит приводной источник в виде двигателя (1) внутреннего сгорания или тягового электромотора (4), устройство (2) получения информации о движущемся впереди транспортном средстве, включающей в себя параметр, связанный с расстоянием между транспортными средствами, который становится тем больше, чем больше расстояние между рассматриваемым транспортным средством и движущимся впереди транспортным средством, и электронный блок (3) управления для управления приводным источником. Электронный блок (3) управления имеет такую конфигурацию, в которой, когда параметр становится первым предварительно определенным значением или более во время режима, в котором приводной источник остановлен, он принудительно автоматически повторно запускает его, и такую конфигурацию, в которой, если рассматриваемое транспортное средство продолжает остановку даже после принудительного автоматического повторного запуска приводного источника, он снова принудительно автоматически останавливает приводной источник, когда движущееся впереди транспортное средство остановлено до того, как параметр становится вторым предварительно определенным значением, большим первого предварительно определенного значения. Повышаются эффективность использования топлива или эффективности использования электрической мощности. 2 н. и 6 з.п. ф-лы, 6 ил.
Комментарии