Способ для выработки вывода управления из системы считывания положения сцепления моторного транспортного средства - RU2627952C2
Код документа: RU2627952C2
Чертежи






Описание
ОБЛАСТЬ ТЕХНИКИ
Это изобретение относится к моторному транспортному средству, имеющему двигатель внутреннего сгорания и, в частности, к моторному транспортному средству, имеющему систему для автоматического пуска и останова двигателя внутреннего сгорания на основании, по меньшей мере частично, состояния зацепления сцепления.
УРОВЕНЬ ТЕХНИКИ
Известно, что следует снабжать моторное транспортное средство, имеющее ручную трансмиссию, системой пуска-останова для автоматического останова и пуска двигателя внутреннего сгорания, используемого для обеспечения расходуемой на движение мощности для моторного транспортного средства.
Система пуска-останова автоматически останавливает двигатель всякий раз, когда определено, что есть возможность поступать таким образом, для того чтобы уменьшить потребление топлива и уменьшить выбросы из двигателя.
Что касается применений пуска-останова с ручной трансмиссией, порог 'педаль сцепления нажата/педаль сцепления отпущена' нормально используется для указания намерения водителя уехать, когда нажато сцепление, так что система пуска-останова может инициировать запуск двигателя. Тот же самый порог также может использоваться для указания, когда водитель отпустил педаль сцепления и намеревается оставаться неподвижным достаточно долго, чтобы система пуска-останова могла отключить двигатель для сбережения топлива.
Отпущенное состояние педали сцепления часто используется в качестве условия, чтобы система пуска-останова выполняла проверки правдоподобия, относящиеся к системе пуска-останова. Установлены такие тесты правдоподобия, которые должны успешно проходиться один раз в каждом ключевом цикле перед вводом в работу пуска-останова. Один из примеров такого теста правдоподобия состоит в том, чтобы проверять, согласуется ли сигнал датчика передачи с оценкой текущей ведомой шестерни, на основании отношения числа оборотов двигателя к скорости транспортного средства для известного передаточного числа. Этот тест, если успешно пройден, будет указывать, что датчик передачи является правильно функционирующим.
Для того чтобы успешно выполнять такой сравнительный тест, в то время, когда выполняется тест, не должно быть проскальзывания между дисками сцепления, то есть, сцепление должно быть зацеплено. Условие для указания, что привод на ведущие колеса полностью зацеплен, состоит в том, чтобы проверить отпущена ли педаль сцепления за точку зажатия (сцепления). Поэтому, до тех пор, пока порог 'педаль сцепления нажата/педаль сцепления отпущена' установлен, чтобы встречаться в более отпущенном положении педали, чем точка зажатия, отпущенное состояние педали сцепления может использоваться в качестве условия для выполнения теста.
Проблема с использованием фиксированного порога педаль сцепления нажата/педаль сцепления отпущена состоит в том, что существует компромисс возможности пуска/останова в противовес определяющему признаку возможностей вождения на основании калиброванного порогового значения. Для того чтобы дать как можно больше времени для запуска двигателя, когда водитель нажимает педаль сцепления, желательно устанавливать пороговое значение как можно выше по ходу педали, к примеру, нажатой на 10%. То есть, положение, где водитель не должен нажимать педаль сцепления очень далеко от полностью отпущенного положения, для того чтобы инициировать запуск двигателя. Эта компоновка улучшает воспринимаемые рабочие характеристики запуска двигателя или энергичность запуска. Одна из проблем при установке порога возле верха хода педали состоит в том, что многие водители (проверка в реальной жизни показывает где-то порядка от 35 до 40%) держат свою ступню на педали сцепления, что иногда называется удерживанием сцепления, либо во время езды на передаче с полностью зацепленным сцеплением, и/или когда транспортное средство неподвижно с трансмиссией на нейтрали с зацепленным сцеплением, а значит, пороговое значение всегда бы превышалось.
Фиг. 2 изображает три состояния сцепления, Отпущенное, Нажатое и Отжатое, и пороги перехода между состояниями. Эти три состояния типично используются в наши дни в применениях пуска-останова с остановкой на нейтрали.
В зоне «R», педаль сцепления считается отпущенной, то есть сцепление однозначно будет зацеплено, в зоне «D» педаль сцепления считается отжатой, и сцепление однозначно будет расцеплено, а в зоне «P» педаль сцепления считается нажатой, и сцепление могло бы быть зацепленным или расцепленным в зависимости от местоположения педали сцепления в зоне «P».
Наиболее значимым порогом является тот, который находится между нажатым и отпущенным состоянием, указан посредством ThRP на фиг. 2.
Далее рассмотрим четыре возможных сценария, в первом сценарии ThRP установлен на 10% от хода педали сцепления, и водитель полностью снимает свою ступню с педали сцепления, во втором сценарии ThRP установлен на 30% от хода педали сцепления, и водитель полностью снимает свою ступню с педали сцепления, в третьем сценарии ThRP установлен на 10% от хода педали сцепления, и водитель удерживает педаль сцепления, так что она остается нажатой на 25% от хода педали сцепления, в четвертом сценарии ThRP установлен на 30% от хода педали сцепления, и водитель удерживает педаль сцепления, так что она остается нажатой на 25% от хода педали сцепления.
При первом сценарии запуск будет быстрым, и имеется в распоряжении время для тестирования правдоподобия;
При втором сценарии, запуск не будет быстрореагирующим, так как педаль сцепления должна быть отжата на 30%, чтобы добиться его. Однако, есть много времени для тестирования правдоподобия;
При третьем сценарии, двигатель не будет останавливаться, так как порог ThRP обычно не будет пересечен, и проверка правдоподобия, поэтому может не происходить; и
При четвертом сценарии, запуск будет быстрым, и есть время для тестирования правдоподобия.
Поэтому, существуют проблемы со сценариями два и три по той причине, что они могут вызывать одно или более из плохо воспринимаемых рабочих характеристик пуска-останова, сниженной доступности операции пуска-останова, и могут вводить водителя в заблуждение, если тестирование правдоподобия возможно не имеет результатом деактивацию системы пуска-останова.
Цель настоящего изобретения состоит в том, чтобы предоставить улучшенные способ и устройство для управления операцией пуска-останова двигателя, установленного на моторное транспортное средство, имеющее ручную трансмиссию, которые минимизируют или устраняют упомянутые выше проблемы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно первому аспекту изобретения, предусмотрен способ выработки вывода управления из системы считывания положения сцепления, при этом, способ содержит контроль положения педали сцепления моторного транспортного средства, определение переходной зоны, определенной диапазоном положений педали сцепления, в которых вывод управления является одним из двух альтернативных состояний положения педали сцепления, содержащих отпущенное состояние педали сцепления и нажатое состояние педали сцепления, установку смещения скользящего порога от начального положения педали сцепления, который, если пересекается, когда положение педали сцепления находится в пределах переходной зоны, будет вызывать изменение состояния положения педали сцепления, и изменение вывода управления с текущего состояния на альтернативное состояние, если пересечен скользящий порог.
Способ дополнительно может содержать установку максимального смещения скользящего порога от положения педали сцепления.
Если состояние педали сцепления является отпущенным состоянием в начальном положении педали сцепления, то величина скользящего порога может иметь величину, большую чем величина начального положения педали сцепления.
Если состояние педали сцепления является нажатым состоянием в начальном положении педали сцепления, то величина скользящего порога может иметь величину, меньшую чем величина начального положения педали сцепления.
Если положение педали сцепления находится в пределах переходной зоны, способ дополнительно может содержать определение состояния положения педали сцепления в качестве отпущенного, если заключительное положение педали сцепления является меньшим, чем скользящий порог.
Если положение педали сцепления находится в пределах переходной зоны, способ дополнительно может содержать определение состояния положения педали сцепления в качестве нажатого, если заключительное положение педали сцепления является большим чем или равным скользящему порогу.
Когда положение педали сцепления и скользящий порог оба находятся в пределах переходной зоны, способ дополнительно может содержать перемещение скользящего порога, с тем чтобы поддерживать предопределенное смещение от положения педали сцепления, если положение педали сцепления перемещается из начального положения педали сцепления от скользящего порога.
Если положение педали сцепления перемещается из начального положения педали сцепления к скользящему порогу, величина скользящего порога может оставаться прежней до тех пор, пока положение педали сцепления не переместилось на предопределенное расстояние за скользящий порог.
Переходная зона может быть ограничена на нижнем конце нижним пределом положения педали сцепления, а на верхнем конце верхним пределом положения педали сцепления.
Отпущенная зона может быть определена диапазоном положений педали сцепления, ограниченным, на одном конце, полностью отпущенным положением педали сцепления, а на другом конце, нижним пределом положения педали сцепления, и вывод управления может всегда указывать отпущенное состояние положения педали сцепления всякий раз, когда положение педали сцепления находится в пределах отпущенной зоны и нажатая зона может быть определена диапазоном положений педали сцепления, ограниченным, на одном конце, верхним пределом положения педали сцепления и ограниченным, на противоположном конце, фиксированным верхним порогом, и вывод управления всегда может указывать нажатое состояние положения педали сцепления всякий раз, когда положение педали сцепления находится в пределах нажатой зоны.
Отжатая зона может быть определена диапазоном положений педали сцепления, ограниченным, на одном конце, фиксированным верхним порогом, а на противоположном конце, полностью отжатым положением педали сцепления, и вывод управления может всегда указывать отжатое состояние положения педали сцепления всякий раз, когда положение педали сцепления находится в пределах отжатой зоны.
Смещение скользящего порога от начального положения педали сцепления может определять переходное окно, ограниченное, на одном конце, положением скользящего порога, а на противоположном конце, начальным положением сцепления, и переходное окно всегда может быть расположено со стороны начального положения сцепления по направлению к зоне положений сцепления альтернативного состояния положения сцепления.
Способ дополнительно может содержать коррекцию скользящего порога на очень малую величину каждый раз, когда вычисляется скользящий порог, чтобы допускать непреднамеренные изменения положения педали сцепления.
Коррекция скользящего порога может содержать увеличение смещения от начального положения педали сцепления до скользящего порога на очень малую величину каждый раз, когда вычисляется скользящий порог.
Если величина скользящего порога является большей, чем начальное положение сцепления, смещение может увеличиваться добавлением очень малой величины к текущему значению скользящего порога.
В качестве альтернативы, если величина скользящего порога является меньшей, чем начальное положение сцепления, смещение может увеличиваться вычитанием очень малой величины из текущего значения скользящего порога.
Очень малая величина может быть меньшей, чем 1% значения смещения.
Способ дополнительно может содержать подачу вывода управления из системы считывания положения сцепления к системе пуска-останова моторного транспортного средства для использования при управлении остановом и пуском двигателя моторного транспортного средства.
Согласно второму аспекту изобретения, предусмотрена система считывания положения сцепления для считывания положения педали сцепления моторного транспортного средства и обеспечения вывода управления, указывающего позиционное состояние педали сцепления, система содержит средство считывания положения для обеспечения сигнала, указывающего текущее положение педали сцепления и электронный процессор положения педали сцепления для обработки сигнала из средства считывания положения, при этом, если положение педали сцепления находится в пределах переходной зоны, ограниченной фиксированным нижним пределом положения педали сцепления и верхним фиксированным пределом положения педали сцепления, в которых состояние положения педали сцепления является одним из отпущенного и нажатого, электронный процессор положения педали сцепления выполнен с возможностью установки смещения скользящего порога от начального положения педали сцепления, который, если пересекается, когда положение педали сцепления находится в пределах переходной зоны, будет вызывать изменение состояния положения педали сцепления и изменение вывода управления с указывающего текущее состояние положения педали сцепления на указывающий альтернативное состояние положения педали сцепления, если пересечен скользящий порог.
Если педаль сцепления находится в отпущенном состоянии в начальном положении педали сцепления, электронный процессор положения педали сцепления может быть выполнен с возможностью устанавливать скользящее пороговое значение, с тем чтобы оно имело величину, большую, чем величина начального положения педали сцепления, и если педаль сцепления находится в нажатом состоянии в начальном положении педали сцепления, электронный процессор положения педали сцепления может быть выполнен с возможностью устанавливать скользящее пороговое значение, с тем чтобы оно имело величину, меньшую чем величина начального положения педали сцепления.
Электронный процессор положения педали сцепления может быть выполнен с возможностью устанавливать максимальное смещение скользящего порога от положения педали сцепления.
Электронный процессор положения педали сцепления дополнительно может быть выполнен с возможностью корректировать скользящее пороговое значение на очень малую величину каждый раз, когда вычисляется скользящий порог, чтобы допускать непреднамеренные изменения положения педали сцепления.
Коррекция скользящего порога может содержать увеличение смещения от начального положения педали сцепления до скользящего порога на очень малую величину каждый раз, когда вычисляется скользящий порог.
Если величина скользящего порога является большей, чем начальное положение сцепления, смещение может увеличиваться добавлением очень малой величины к текущему значению скользящего порога.
Если величина скользящего порога является меньшей, чем начальное положение сцепления, смещение может увеличиваться вычитанием очень малой величины из текущего значения скользящего порога.
Очень малая величина может быть меньшей, чем 1% значения смещения.
Электронный процессор положения педали сцепления может быть выполнен с возможностью подавать вывод управления из системы считывания положения сцепления к системе пуска-останова моторного транспортного средства для использования в управлении остановом и пуском двигателя моторного транспортного средства.
Согласно третьему аспекту изобретения, предусмотрено моторное транспортное средство, имеющее двигатель, сцепление, состояние зацепления которого управляется педалью сцепления, систему для автоматического пуска и останова двигателя на основании по меньшей мере изменений положения педали сцепления, и систему считывания положения сцепления для считывания положения педали сцепления, сконструированную в соответствии с упомянутым вторым аспектом изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее, изобретение, в качестве примера будет описано со ссылкой на прилагаемые чертежи, на которых:
фиг. 1A - схематическое представление моторного транспортного средства, имеющего систему пуска-останова, согласно изобретению;
фиг. 1B - схематическое представление системы привода сцепления, формирующей часть системы пуска-останова по фиг. 1;
фиг. 2 - схематическое представление операционного диапазона перемещения педали сцепления, показывающее три предопределенных зоны в соответствии с предшествующим уровнем техники;
фиг. 3 - схематическая диаграмма, показывающая рабочий диапазон перемещения педали сцепления, показывающая четыре предопределенных зоны в соответствии с изобретением;
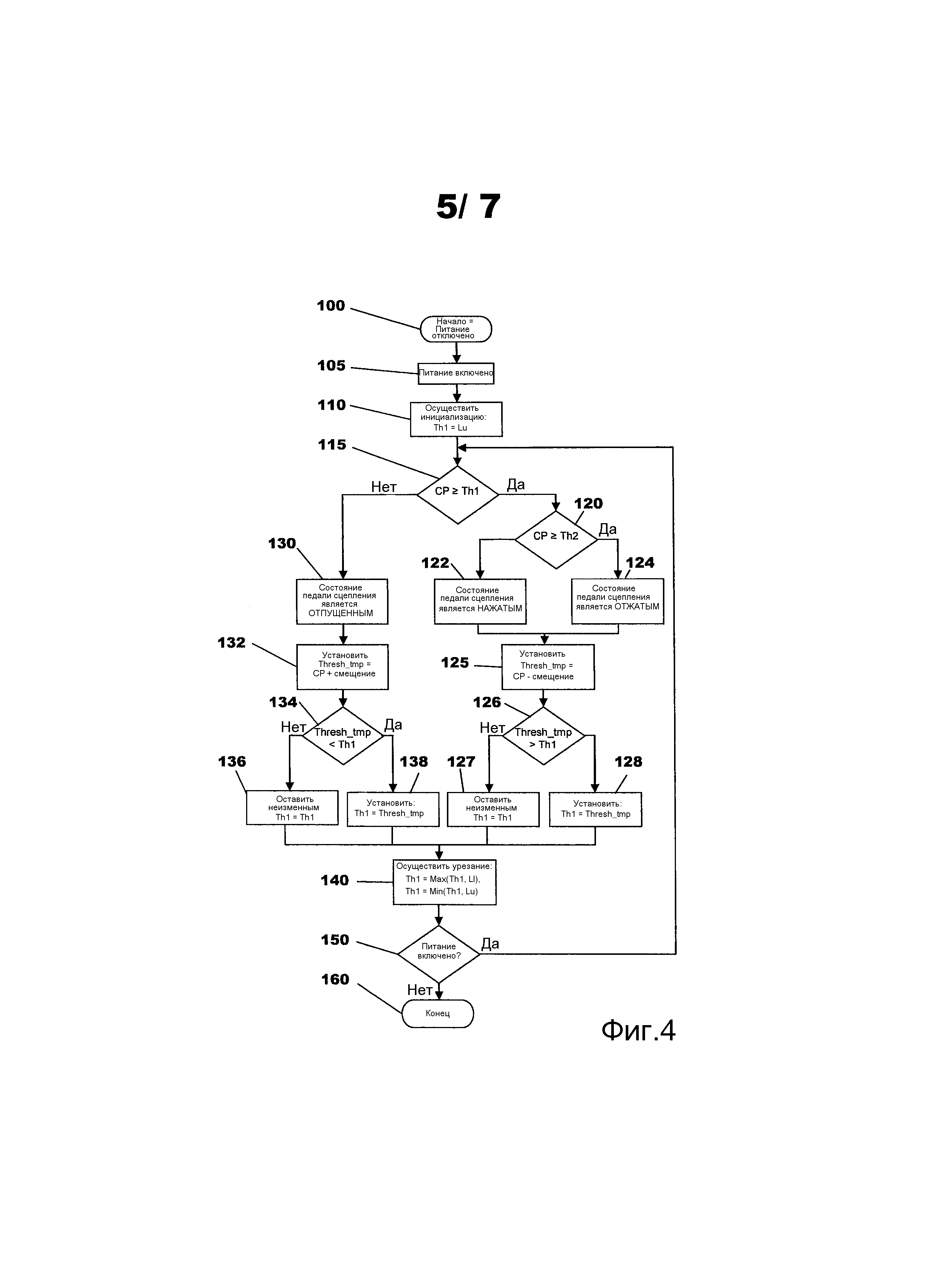
фиг. 4 - блок-схема последовательности операций способа, показывающая первый вариант осуществления способа выработки вывода управления из системы считывания положения сцепления согласно изобретению;
фиг. 5 - блок-схема последовательности операций способа, показывающая второй вариант осуществления способа выработки вывода управления из системы считывания положения сцепления согласно изобретению;
фиг. 6 - схематическая диаграмма, показывающая шесть изменений положения сцепления и получающиеся в результате переходы между состояниями.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Со ссылкой на фиг. 1A и 1B, показано моторное транспортное средство 5, имеющее двигатель 10, приводящий в действие многоскоростную трансмиссию 11. Трансмиссия 11 с возможностью привода присоединена к двигателю 10 сцеплением 8 (не показано на фиг. 1A), которое зацепляется или отпускается вручную водителем моторного транспортного средства 5 и имеет средство выбора передач (не показано). Средство выбора передач подвижно между несколькими положениями, в том числе, по меньшей мере одним положением, где выбрана передача, формирующая часть многоскоростной трансмиссии, и нейтральным положением, в котором не выбрана ни одна передача многоскоростной трансмиссии. Когда средство выбора передач перемещено к нейтральному положению, многоскоростная трансмиссия 11 упоминается находящейся в нейтральном состоянии, в котором привод не может передаваться многоскоростной трансмиссией, а когда средство выбора передач перемещено к положению на передаче, многоскоростная трансмиссия 11 упоминается находящейся в состоянии на передаче, в котором привод может передаваться многоскоростной трансмиссией.
Стартер двигателя в виде интегрированного стартера-генератора 13 с возможностью привода присоединен к двигателю 10 и, в этом случае, присоединен гибким приводом в виде приводного ремня или цепного привода 14 к коленчатому валу двигателя 10. Стартер-генератор 13 присоединен к источнику электрической энергии в форме батареи 15 и используется для запуска двигателя 10, и который подзаряжается стартером-генератором, когда он функционирует в качестве электрического генератора. Изобретение не ограничено использованием стартера-генератора 13, и стартер-генератор 13 мог бы быть заменен стартерным электродвигателем для запуска двигателя 10.
Следует принять во внимание, что, во время запуска двигателя 10, стартер-генератор 13 приводит в движение коленчатый вал двигателя 10, и что в другие моменты времени стартер-генератор приводится в движение двигателем 10 для выработки электрической энергии.
Управляемое водителем устройство включения/выключения в виде управляемого ключом замка 17 зажигания используется для управления общей работой двигателя 10. То есть, когда двигатель 10 работает, замок 17 зажигания находится в положении 'включенного ключа зажигания', а когда замок 17 зажигания находится в положении 'выключенного ключа зажигания', двигатель 10 работать не способен. Замок 17 зажигания также включает в себя третье кратковременное положение, используемое для ручного запуска двигателя 10. Следует принять во внимание, что другие устройства могут использоваться для обеспечения этих функциональных возможностей, и что изобретение не ограничено использованием замка зажигания.
Электронный блок 16 управления присоединен к стартеру-генератору 13, к двигателю 10, к датчику 12 средства выбора передач, используемому для контроля, находится ли трансмиссия 11 в нейтрали или на передаче, к датчику 21 ходовой скорости, используемому для измерения частоты вращения ходового колеса 20, к датчику 24 положения тормозной педали, используемому для контроля положения тормозной педали 23, к системе считывания положения педали сцепления, используемой для контроля положения педали 25 сцепления, и к датчику 19 положения дроссельной заслонки, используемому для контроля положения педали 18 акселератора. Педаль 18 акселератора выдает водительский ввод требуемой мощности на выходе из двигателя 10. Если педаль 18 акселератора была перемещена из исходного положения, она упоминается находящейся в нажатом положении или в нажатом состоянии.
Хотя измерение скорости моторного транспортного средства описано выше со ссылкой на использование датчика 21 ходового колеса, так как такие датчики часто уже присутствуют на моторном транспортном средстве как часть тормозной антиблокировочной системы, следует принять во внимание, что другие пригодные средства могут использоваться для определения скорости моторного транспортного средства 5, например, такие как датчик, измеряющий частоту вращения выходного вала из трансмиссии 11.
Следует принять во внимание, что термин датчик средства выбора передач не ограничен датчиком, который контролирует положение средства выбора передач, но скорее является любым устройством, которое может выдавать обратную связь о том, находится ли трансмиссия 11 на передаче или в нейтрали.
Подобным образом, термин датчик тормозной педали не ограничен датчиком, который контролирует положение тормозной педали, но скорее является любым устройством, которое выдает обратную связь о том, приложил ли водитель моторного транспортного средства 5 давление к тормозной педали 23 для применения тормозов транспортного средства 5. Например, датчик тормозной педали мог бы контролировать давление текучей среды в одной или более тормозных магистралей. Когда тормозная педаль 23 была нажата в достаточной мере, чтобы применить тормоза, она упоминается находящейся в нажатом состоянии или нажатом положении.
В этом случае, система считывания положения педали сцепления содержит датчик 26 линейного положения, используемый для контроля фактического положения педали 25 сцепления, и электронный процессор 16C положения педали сцепления (EC3P), используемый для обработки сигнала положения с датчика 26 положения сцепления в вывод управления для использования электронным блоком 16 управления с использованием логики, хранимой в EC3P 16C.
Датчик 26 положения сцепления может содержать один или более датчиков положения, таких как поворотные потенциометры.
Определение состояния педали 25 сцепления в качестве нажатой или отпущенной выполняется посредством EC3P 16C, формирующего часть электронного блока 16 управления, с использованием сигнала положения сцепления, принятого с датчика 26 положения. Сигнал положения сцепления представляет текущее положение (CP) педали 25 сцепления.
Как показано на фиг.1B система привода сцепления, в этом случае, сформирована педалью 25 сцепления, главным гидравлическим цилиндром 27, вспомогательным гидравлическим цилиндром 28 и рычагом 29 выключения сцепления, который зацепляет и отпускает сцепление 8 через выжимной подшипник 9. Однако, следует принять во внимание, что другие средства могли бы использоваться для преобразования перемещения педали 25 сцепления в зацепление или расцепление сцепления 8, и что изобретение не ограничено использованием гидравлической системой привода сцепления.
Также следует принять во внимание, что электронный процессор 16C положения педали сцепления (EC3P) мог бы быть отдельным блоком, и может не быть сформированным в качестве части основного электронного блока 16 управления пуском-остановом.
Электронный блок 16 управления принимает несколько сигналов из двигателя 10, в том числе, сигнал, указывающий число оборотов двигателя 10, с датчика числа оборотов (не показан) и отправляет сигналы к двигателю, используемые для управления глушением и запуском двигателя 10. В этом случае, двигатель 10 является двигателем 10 с искровым зажиганием, и сигналы, отправляемые из электронного блока 16 управления, используются для управления системой подачи топлива (не показана) для двигателя 10 и системой зажигания (не показана) для двигателя 10. Если бы двигатель 10 должен был быть дизельным двигателем, то управлялась бы только подача топлива к двигателю. Электронный блок 16 управления содержит различные компоненты, в том числе, центральное процессорное устройство, устройства памяти, таймеры и устройства обработки сигналов для преобразования сигналов с датчиков, присоединенных к электронному блоку 16 управления, в данные, которые используются электронным блоком 16 управления для управления работой и, в частности, автоматическим остановом и запуском двигателя 10.
Во время нормальной работы двигателя, электронный блок 16 управления выполнен с возможностью управления топливом, подаваемым к двигателю 10, и для настройки системы зажигания, так чтобы искры подавались к двигателю 10 со свечей зажигания с корректным выбором времени для создания требуемого крутящего момента двигателя.
Электронный блок 16 управления управляет работой двигателя 10, который может работать в двух режимах, первом или режиме работы с автоматическим пуском-остановом, и втором или режиме непрерывной работы. Однако, следует принять во внимание, что один или более отдельных электронных контроллеров могли бы использоваться для управления нормальной работой двигателя 10, а электронный контроллер 16 мог бы управлять только переключением двигателя 10 между двумя режимами работы и автоматическим остановом и пуском двигателя 10.
Электронный блок 16 управления дополнительно выполнен с возможностью определять, является ли надлежащим эксплуатировать двигатель 10 в первом режиме, проверяя один или более рабочих параметров двигателя перед разрешением работы в первом режиме.
Эти рабочие параметры двигателя включают в себя температуру охлаждающей жидкости двигателя, разожжены ли какие-нибудь каталитические нейтрализаторы, связанные с двигателем, и является ли двигатель вращающимся в пределах предопределенного диапазона чисел оборотов. Например, если температура охлаждающей жидкости является меньшей, скажем, чем 65°C, или каталитический нейтрализатор отработавших газов не разожжен, или число оборотов двигателя является большим, чем, скажем, 1110 оборотов в минуту (RPM), то вход в первый режим запрещен, и электронный блок 16 управления выполнен с возможностью приведения двигателя 10 в действие в режиме прогрева, в котором двигатель 10 непрерывно работает независимо от того, является ли моторное транспортное средство 5 движущимся или является неподвижным.
Как только определено, что условия эксплуатации двигателя были удовлетворены, затем, система пуска-останова устанавливается в первый режим работы, когда существуют одно или более предопределенных условий останова и пуска двигателя.
Эти условия останова и пуска двигателя предназначены для системы останова на нейтрали на основании сигналов, принятых электронным блоком 16 управления с датчика 12 средства выбора передач и EC3P 16C. Если вывод управления из EC3P 16C указывает, что педаль 25 сцепления не является нажатой, а сигнал с датчика 12 средства выбора передач указывает, что была выбрана нейтраль, то двигатель 10 останавливается, а когда вывод управления из EC3P 16C указывает, что педаль 25 сцепления является нажатой, то двигатель 10 повторно запускается незамедлительно, либо когда датчик средства выбора передач указывает, что нейтраль больше не выбрана.
Следует принять во внимание, что дополнительное условие эксплуатации, которое используется многими системами, состоит в том, является ли моторное транспортное средство 5 движущимся. В таком случае, работа в первом режиме запрещается, если скорость моторного транспортного средства 5 находится выше предопределенной низкой скорости.
Далее, со ссылкой на фиг. 3, схематически показано, как EC3P 16C обрабатывает выходной сигнал с датчика 26 положения педали сцепления по зонам работы на основании процента положения полного нажатия.
В зоне «R», вывод управления из EC3P 16C будет указывать, что педаль 25 сцепления отпущена, то есть, сцепление 8 зацеплено.
В зоне «D», вывод управления из EC3P 16C будет указывать, что педаль 25 сцепления является отжатой, а сцепление 8 расцеплено.
В зоне «P», в которой расположена точка зажатия сцепления 8, вывод управления из EC3P 16C будет указывать, что педаль 25 сцепления нажимается.
В переходной зоне «P или R», вывод управления из EC3P 16C будет зависеть от местоположения и движения педали 25 сцепления.
Отпущенная зона «R» определена нижним пределом 0% и верхним предопределенным фиксированным пределом Ll, который, в этом случае, имеет значение 10%.
Отжатая зона «D» определена верхним пределом 100% и предопределенным фиксированным порогом Th2, который, в этом случае, имеет значение 70%.
Переходная зона «P или R» определена нижним предопределенным фиксированным пределом Ll и верхним предопределенным фиксированным пределом Lu, который, в этом случае, имеет значение 30%. Верхний предопределенный фиксированный предел Lu выбирается из условия, чтобы он имел значение позиционирования, меньшее чем ожидаемая точка зажатия сцепления 8, но большее чем значение позиционирования, обусловленное сдвигом педали 25 сцепления вследствие удерживания педали 25 сцепления водителем.
Нажатая зона «P» определена нижним предопределенным фиксированным пределом Lu и предопределенным фиксированным порогом Th2.
Дополнительный скользящий следящий порог Th1 действует в пределах переходной зоны 'P или R' и ограничен нижним пределом Ll и верхним пределом Lu. То есть, Lu≥Th1≥Ll.
Общая работа EC3P 16C далее будет пояснена со ссылкой на шесть примерных переходов между состояниями, пронумерованных с «A» по «F» на фиг. 3.
Переход «A» между состояниями показывает переход положения педали сцепления (CP) из Нажатого в направлении Отпущенного. Пересечение верхнего предела Lu переходной зоны в этом направлении будет вызывать изменение состояния вывода управления из EC3P 16C с нажатого на отпущенное.
Переход «C» между состояниями, в котором положение педали сцепления перемещается из переходной зоны в нажатую зону, будет всегда приводить к выводу нажатия. Происходит ли изменение состояния, когда пересечен верхний фиксированный предел Lu, будет зависеть от того, является ли исходное состояние отпущенным или нажатым.
Переход «E» между состояниями, при котором положение CP педали сцепления переходит нижний предел Ll из отпущенной зоны в переходную зону, вызывает переход в выводе управления из EC3P 16C с отпущенного на нажатый.
Переход «F» между состояниями показывает переход из переходной зоны через нижний фиксированный предел Ll в направлении Отпущено. Пересечение нижнего предела Ll переходной зоны в этом направлении всегда будет вызывать переход в выводе управления из EC3P 16C из нажатого на отпущенный, если исходное состояние было нажатым, или сохраняет состояние в качестве отпущенного, если исходное состояние было отпущенным.
Переход «B» между состояниями показывает перемещение положения педали сцепления в пределах переходной зоны по направлению к отжатому положению (увеличения отжатия), сопровождающееся уменьшением отжатия педали сцепления, таким как переход «A» сцепления. То есть, сцепление было отпущено до положения X0 педали сцепления, где X0 представляет наиболее отпущенное положение педали сцепления в пределах границ переходной зоны, и теперь, перемещается в противоположном направлении, так что отжатие педали сцепления увеличивается. X1 - конечное нерабочее положение педали сцепления, а 'x' является сдвигом педали сцепления.
Переходное окно (не показано на фиг. 3) лежит с нажатой стороны положения X0 педали сцепления, ширина переходного окна, в этом случае, является предопределенной малой величиной 'w', которая является смещением между исходным положением X0 и следящим порогом Th1. Местоположение переходного окна находится с нажатой стороны X0 потому, что следящий порог Th1 сопровождает или следует за положением педали 25 сцепления через смещение 'w', и движение для того, чтобы прибытие в X0 происходило из Нажатого по направлению к Отпущенному. В показанном примере, X1 показано сдвинутым от X0 на расстояние 'x', равное 'w', поэтому, оно лежит на пороге Th1, и состояние сцепления остается отпущенным, так как следящий порог Th1 не был пересечен. Если бы следящий порог Th1 был пересечен, то есть, x'>'w', состояние было бы изменившимся на нажатое, так как был пересечен следящий порог Th1.
Продолжающееся перемещение положения педали сцепления в том же направлении, как обсужденное выше, не будет перемещать следящий порог Th1 до тех пор, пока положение педали сцепления не переместилось в направлении отжатия сцепления на более чем ширину 'w' переходного окна за текущее положение следящего порога Th1. Отметим, что переходное окно затем будет перебрасываться, с тем чтобы лежать с отпущенной стороны положения педали сцепления, как только пройден ведомый порог Th1.
Так как никакого переходного окна не присутствует с отпущенной стороны положения X0 педали сцепления, никаких изменений состояния не будет происходить, если положение педали сцепления продолжает перемещаться от положения X0. Следящий порог Th1 будет следовать за ним позади на расстоянии 'w', с тем чтобы сохранять небольшое переходное окно с нажатой стороны положения педали сцепления.
Переход «D» между состояниями показывает перемещение положения педали сцепления в пределах транзитной зоны по направлению к отпущенному положению (снижению отжатия), которое следует за перемещением по направлению к отжатому состоянию, такому как «d».
В таком случае, переходное окно будет лежать с отпущенной стороны положения Z0 педали сцепления, так как оно переместилось из более отпущенного положения по направлению к менее отпущенному положению, а в этом случае, предыдущий следящий порог был пересечен, вызывая состояние, являющееся нажатым. Если педаль сцепления перемещается из Z0 к Z1 в направлении отпускания педали сцепления на расстояние 'z', то никаких изменений состояния не будет происходить, так как, в этом случае, 'z'='w', где 'w' - ширина переходного окна, ограниченного на отпущенном конце следящим порогом Th1. Однако, если 'z' увеличивается на более чем 'w', то есть, положение педали сцепления пересекает следящий порог Th1, то состояние будет изменятся с нажатого на отпущенное, и переходное окно будет лежать с нажатой стороны положения педали сцепления.
Продолжающееся перемещение положения педали сцепления в том же направлении, как обсужденное выше, не будет перемещать следящий порог Th1 до тех пор, пока положение педали сцепления не переместилось в направлении отпускания сцепления на более чем ширину 'w' переходного окна за текущее положение следящего порога Th1.
Так как никакого переходного окна не присутствует с нажатой стороны положения Z0 педали сцепления, никаких изменений состояния не будет происходить, если положение педали сцепления перемещается из положения Z0 в нажатом направлении. Следящий порог Th1 будет следовать за ним позади на расстоянии 'w', с тем чтобы поддерживать небольшое переходное окно с отпущенной стороны положения педали сцепления до тех пор, пока следящий порог не будет равен верхнему фиксированному пределу Lu. Отметим, что верхнее предельное значение Lu не будет оказывать воздействия в этом случае, так как состояние уже является нажатым.
Поэтому, устанавливается следящий скользящий порог Th1, который следует за реальным положением педали 25 сцепления (CP на фиг. 4 и 5), в то время как водитель нажимает и отпускает педаль 25 сцепления, и этот следящий порог Th1 используется наряду с тем, что положение педали сцепления остается в пределах переходной зоны, чтобы осуществлять изменения состояния, когда небольшое изменение положения педали сцепления происходит в направлении, противоположном предыдущему направлению педали сцепления.
Посредством установки смещения следящего порога Th1, чтобы оно было небольшим числом, например, таким как 5% совокупного хода положения педали сцепления, относительно небольшие изменения положения педали сцепления могут использоваться для осуществления изменений состояния положения педали сцепления.
Следящий порог Th1 следует за положением педали сцепления на постоянном расстоянии, называемом переходным смещением 'w', когда положение педали сцепления является движущимся от ведомого порога Th1. Ведомый порог Th1, в таком случае, будет начинать отслеживать положение педали сцепления, когда положение педали сцепления переместилось более чем на смещение 'w' за предыдущий ведомый порог Th1. Скользящий порог Th1 всегда ограничен, чтобы оставаться между нижним пределом Ll и верхним пределом Lu.
В отношении водителя моторного транспортного средства 5, который удерживает педаль 25 сцепления, перемещение педали 25 сцепления по направлению к нажатой, которое обычно используется, чтобы инициировать запуск двигателя посредством системы пуска-останова, является совместимым расстоянием (w%) ухода педали независимо от фактической величины отжатия педали сцепления, обусловленного удерживанием педали 25 сцепления в пределах нормальных ожидаемых пределов, таких как от 15 до 25%.
Поэтому улучшения в работе системы пуска-останова могут производиться посредством установки смещения ведомого порога Th1 на малое значение, такое как w% положения педали сцепления от управляющего значения положения педали сцепления, который, если пересечен, вызывает изменение состояния.
Значение w%, например, могло бы быть выбрано в качестве 5%, которое является значением, достаточно большим, чтобы избежать ложных переходов, инициированных сигнальным шумом или непреднамеренными движениями ступни водителя, вызванными вибрацией или подергиваниями, но достаточно малым, чтобы давать ощущение энергичности запуска двигателя водителю.
Отметим, что, для избежания быстрых повторяющихся переходов через границы, предусмотрен гистерезис для предотвращения многократного переключения между состояниями. То есть, предусмотрены два ведомых порога, а не один, как обсуждено выше.
Дополнительное усовершенствование состоит в том, чтобы адаптивно узнавать X0 и Z0. Это предоставляет возможность, чтобы ступня водителя медленно продвигалась (сползала) в любом направлении наряду с попыткой по-прежнему удерживать педаль. Непреднамеренные изменения положения педали сцепления часто называются как медленные продвижения педали сцепления. Использование элемента обучения с временным критерием, X0 и Z0 предоставлена возможность медленно адаптироваться, чтобы помочь избежать необязательных переходов между состояниями. Таким образом, система пуска-останова может проводить различие между уставшей ступней и ясными намерениями водителя. Ясное намерение водителя дальше нажимать или отпускать педаль, указывающее желание начать движение, переключить передачу или полностью зацепить сцепление, определялось бы, как когда перемещение на величину, большую чем w%, было обнаружено в пределах короткого предопределенного периода времени.
Со ссылкой на фиг. 6, подробнее показаны шесть изменений положения педали сцепления, и как ведомый порог Th1 компонуется, с тем чтобы определять один конец переходного окна, имеющего противоположный конец, расположенный в положении педали сцепления, используемом для установки ведомого порога Th1. Перемещение положения педали сцепления в пределах переходного окна не будет вызывать изменения состояния положения педали сцепления, и не будет перемещать положение скользящего ведомого порога Th1.
Следует принять во внимание, что все определенные состояния подаются в качестве вывода из EC3P 16C к электронному блоку 16 управления для использования при управлении системой пуска-останова моторного транспортного средства 5.
Переход T1 начинается с CP=100% и заканчивается при CP=24%. Когда величина CP падает ниже 70%, соответствующих фиксированному порогу Th2, состояние изменяется с отжатого на нажатое. По мере того, как величина положения CP педали сцепления продолжает уменьшаться, состояние остается в качестве нажатого до тех пор, пока верхний фиксированный предел Lu не пересечен на 30%, в какой момент, состояние изменяется на отпущенное и будет оставаться в отпущенном состоянии до тех пор, пока оно не достигает конца своего изменения в положении, где положение педали сцепления имеет значение 24%. Отметим, что, в этом состоянии, переходное окно лежит с нажатой стороны положения педали сцепления, CP=24%, и что ведомый порог Th1 смещен к нажатому направлению на расстояние 5%, так что Th1=29%.
Переходное окно всегда лежит со стороны положения педали сцепления, которая будет вызывать изменение состояния из отпущенного в нажатое или из нажатого в отпущенное.
Переход T2 является перемещением положения педали сцепления с 24% на 0% и сопровождает переход T1. В этом случае, не будет никакого изменения состояния, так как состояние уже отпущено, и положение педали сцепления является перемещающимся по направлению к полностью отпущенному положению. Переходное окно далее будет следовать за положением педали сцепления по направлению к отпущенному положению, но, так как ведомый порог Th1 лежит с нажатой стороны положения педали сцепления, нет порога изменения состояния, который должен быть пересечен.
Переход T3 является перемещением положения педали сцепления с 24% на 100% и сопровождает переход T1.
По мере того, как величина положения педали сцепления возрастает, нет изменений состояния до тех пор, пока положение педали сцепления не является большим, чем положение ведомого порога TH1. То есть, когда положение CP педали сцепления является большим, чем 29%, состояние будет изменяться с отпущенного на нажатое. По мере того, как величина положения CP педали сцепления продолжает возрастать, состояние будет оставаться нажатым до тех пор, пока фиксированный порог Th2 не пересечен на 70%. Выше 70%, состояние будет изменяться на отжатое и оставаться в таком состоянии до тех пор, пока положение педали сцепления не достигает 100%.
Переход T4 начинается с CP=0% и заканчивается при CP=24%. Как только нижний фиксированный предел L1 пересечен на 10% состояние изменяется с отпущенного на нажатое и будет оставаться в таком состоянии до тех пор, пока положение педали сцепления не достигает 24%. Так как положение педали сцепления переместилось с отпущенного состояния по направлению к отжатому состоянию, переходное окно лежит с отпущенной стороны положения CP педали сцепления, и ведомый порог Th1 смещен на 5% по направлению к отпущенному состоянию от положения CP педали сцепления. Поэтому, хотя положение педали сцепления является таким же, как для перехода T1, местоположение переходного окна находится с противоположной стороны положения CP педали сцепления.
Переход T5 происходит с 24% на 0% и сопровождает T4.
Состояние положения педали сцепления после перехода T4 изначально является нажатым в отличие от результата от перехода T1 на 24%, который вызвал отпущенное состояние.
В то время как величина положения педали сцепления уменьшается, состояние остается прежним до тех пор, пока не достигнут ведомый порог Th1 на 19%. Как только ведомый порог Th1 пересечен, состояние изменяется на отпущенное и будет оставаться в том же состоянии до тех пор, пока положение педали сцепления не достигает 0%, полностью отпущенного положения педали 25 сцепления.
Когда величина положения педали сцепления падает ниже текущего ведомого порога Th1, она будет заставлять ведомый порог Th1 перебрасываться на нажатую сторону положения педали сцепления, и ведомый порог затем будет отслеживать положение CP педали сцепления, отставая на 5% после того, как положение педали сцепления переместилось на более чем 5% за предварительно установленный ведомый порог Th1, до тех пор, пока ведомый порог Th1 не достигает нижнего порогового значения Ll.
Переход T6 сопровождает переход T4.
Начальное состояние является нажатым, и это состояние сохраняется до тех пор, пока фиксированный порог Th2 не пересечен на 70%, после чего, оно изменяется на отжатое и остается в отжатом состоянии по мере того, как педаль сцепления дополнительно отжимается до полностью отжатого положения, имеющего величину 100%. Отметим, что, так как ведомый порог Th1 лежит с отпущенной стороны положения педали сцепления, он не может пересекаться. Однако, когда величина положения педали сцепления увеличивается от 24%, ведомый порог будет осуществлять следование до тех пор, пока он не достигнет максимального допустимого значения 30%, когда достигается верхний фиксированный предел Lu.
Положение переходного окна, а отсюда, ведомого порога Th1, поэтому, всегда находится со стороны положения педали сцепления, которая, если порог Th1 пересекается наряду с тем, что положение педали сцепления находится в пределах переходной зоны, будет вызывать изменение состояния из нажатого в отпущенное, или наоборот.
Далее, со ссылкой на фиг. 4, показан первый вариант осуществления способа для выработки вывода управления из EC3P 16C с применением динамической функции сцепления согласно этому изобретению.
Способ, в общих чертах, содержит сначала установку скользящего порога Th1 на верхнем пределе Lu его допустимого диапазона. Функция затем выполняется повторно, и, при каждом выполнении, новое местоположение для скользящего порога (Thresh_tmp) вычисляется, чтобы быть фиксированным смещением, которое, в этом случае, находится в 5% в стороне от текущего положения педали сцепления (CP). Если новое вычисленное местоположение (Thresh_tmp) было бы ближе к текущему положению педали (CP), то новое местоположение принимается в качестве порогового положения от Отпущенного до Нажатого (Th1), иначе, сохраняется предыдущее значение порога Th1. В любом случае, значение для порога Th1 ограничивается верхним и нижним пределами Lu, Ll, которые, в этом случае, имеют значения 30% и 10% соответственно.
Подробно, способ начинается на этапе 100, на котором моторное транспортное средство 5 не является работающим, затем, на этапе 105, возникает событие включения ключа зажигания, включающее питание к системам моторного транспортного средства и, в частности, к электронному блоку 16 управления, датчика 26 педали сцепления и EC3P 16C.
Затем, на этапе 110, EC3P 16C инициализируется установкой Th1 равным фиксированному верхнему пределу Lu, а именно, 30%, это обычно достигается гарантированием, что педаль 25 сцепления была полностью отжата, перед тем, как способ может начинаться в буквальном смысле.
То есть, на практике, есть дополнительный этап 107 (не показан), на котором тестируется, была ли педаль 25 сцепления полностью отжата, и, если не была, способ возвращается к началу цикла на этап 105, а если была, способ продвигается на этап 110 с ведомым порогом, установленным в Lu. После этапа 110, способ продвигается на этап 115 принятия решения.
На этапе 115 принятия решения, текущее положение педали сцепления (CP) сравнивается со скользящим порогом Th1. Если величина CP является такой же или большей, чем Th1, то результат состоит в том, чтобы продвигаться на этап 120, тогда как, если величина CP является меньшей, чем Th1, результат состоит в том, чтобы продвигаться на этап 130.
Рассматривая первым случай, где CP является большим чем или равным пороговому значению Th1 перемещения, способ продолжается на этапе 120 сравнением CP с Th2, которое является более низким порогом для отжатой зоны. Если CP является большим или равным Th2, состояние разрешается на этапе 124 в качестве являющейся 'Отжатым', и соответствующий вывод управления выдается электронным блоком 16 управления, и, если CP является меньшим, чем Th2, состояние разрешается на этапе 122 в качестве являющейся 'Нажатой', и соответствующий вывод управления выдается к электронному блоку 16 управления. Сущность вывода управления будет зависеть от специфичной конструкции EC3P 16C, но, например, могла бы быть двухбитным выводом, имеющим следующие обозначения: [00] указывает состояние отпущенного положения педали сцепления; [01] указывает состояние нажатого состояния педали сцепления; а [11] указывает состояние отжатого положения педали сцепления.
Затем, с этапов 122 и 124 способ продвигается на этап 125, где временный порог Thresh_tmp устанавливается равным CP минус переходное смещение (w%).
Способ затем продвигается на этап 126, где временный порог Thresh_tmp сравнивается с текущим значением следящего порога Th1 и, если значение Thresh_tmp является большим, чем Th1, способ продвигается на этап 128, где Th1 устанавливается в Thresh_tmp, а если Thresh_tmp не является большим, чем Th1, то, на этапе 127, Th1 остается неизменным.
Возвращаясь на этап 130, где состояние разрешается в качестве являющегося 'Отпущенным', и соответствующий вывод управления выдается из EC3P 16C к электронному блоку 16 управления, способ продвигается с этапа 130 на этап 132.
На этапе 132, временный порог Thresh_tmp устанавливается равным CP плюс переходное смещение (w%).
Способ продвигается на этап 134, где временный порог Thresh_tmp сравнивается с текущим значением следящего порога Th1 и, если значение Thresh_tmp является меньшим, чем Th1, способ продвигается на этап 138, где Th1 устанавливается в Thresh_tmp, а если Thresh_tmp не является меньшим, чем Th1, то, на этапе 136, Th1 остается неизменным.
Следуя с любого из этапов 127, 128, 136 и 138, способ продвигается на этап 140, где убеждаются, что значение Th1, выведенное с предыдущего этапа 127 или 128, или 136, или 138, находится в рамках верхнего и нижнего пределов Lu и Ll, соответственно. То есть, если Th1 больше Lu, его значение уменьшается, чтобы быть равным Lu, и, подобным образом, если значение Th1 является меньшим, чем Ll, его значение увеличивается, чтобы быть равным Ll.
Способ затем продвигается с этапа 140 на этап 150, где проверяется, присутствует ли до сих пор состояние включенного ключа зажигания. Если состояние 'включенного ключа зажигания' до сих пор присутствует, указывая, что питание остается включенным, то способ возвращается на этап 115, и повторяются этапы с 115 по 150, иначе, он заканчивается на этапе 160. Этапы с 115 по 150 способа повторно выполняются каждые от 20 до 50 мс, если только остается включенным питание.
Числовые примеры работы способа, показанные на фиг. 1, изложены ниже на основании переходов, приведенных на фиг. 6.
Переход T1, в котором CP переходит со 100% на 24%
Где:
CP*=100% CP* - значение положения педали сцепления, на котором основаны вычисления.
В этом случае, значение положения педали сцепления имеет величину 100.
Th1=30%. (Th1 не может быть большим, чем 30%, вследствие этапа 140 усечения).
Th2=70% Ll=10% Lu=30%
Смещение 'w'=5%
Переход T1, в котором CP переходит со 100% на 50%
Где: CP*=50%
Th1=30%. (Th1 не может быть большим, чем 30%, вследствие этапа 140 усечения).
Th2=70% Ll=10% Lu=30%
Смещение 'w'=5%
Переход T1, в котором величина CP переходит с 50% на 24%
Где: CP*=24%
Th1=30%. (Th1 не может быть большим, чем 30%, вследствие этапа 140 усечения).
Th2=70% Ll=10% Lu=30%
Смещение 'w'=5%
Поэтому, в конце перехода T1, состояние сцепления имеет значение Отпущено, положение педали сцепления имеет значение 24%, переходное окно лежит с нажатой стороны положения педали сцепления с ведомым порогом Th1, расположенным на расстоянии 5% от положения педали сцепления.
Переход T2, в котором CP переходит с 24% на 20%
Где: CP*=20%
Th1=29% Th2=70% Ll=10%
Lu=30% Смещение 'w'=5%
Поэтому, не было изменения состояния, но следящий порог следовал за положением педали сцепления, с тем чтобы оставить смещение 5% с переходным окном с нажатой стороны положения педали сцепления.
Переход T2, в котором CP переходит с 20% на 0%
Где:
CP*=0% Th1=25% Th2=70%
Ll=10% Lu=30% Смещение 'w'=5%
Поэтому, не было изменения состояния, и следящий порог Th1 был предохранен от падения ниже 10%, переходное окно остается на нажатой стороне положения педали сцепления, но, в этом случае, расположено на 10% в стороне вследствие эффекта урезания по этапу 140.
Переход T3 в котором CP переходит с 24% на 28%
Где:
CP*=28% Th1=29% Th2=70%
Ll=10% Lu=30% Смещение 'w'=5%
Поэтому, не было изменений состояния, и следящий порог Th1 не перемещался, но, в этом случае, расположен на 1% в стороне.
Переход T3 в котором CP переходит с 28% на 29,5% Где:
CP*=29,5% Th1=29% Th2=70%
Ll=10% Lu=30% Смещение 'w'=5%
Поэтому, было изменение состояния, и следящий порог Th1 остался прежним. Переходное окно перебрасывается с нажатой стороны положения педали сцепления на отпущенную сторону положения педали сцепления, так что следящий порог остается на стороне положения педали сцепления, в котором изменение состояния будет происходить, если он пересечен.
Отметим, что, в этом случае, следящий порог расположен на 0,5% в стороне. На практике, зона гистерезиса используется для предотвращения многократного переключения, когда положение педали сцепления, скажем, расположено в пределах 3% следящего порога, после того, как следящий порог был пересечен.
Переход T3 в котором CP переходит с 29,5% на 50% Где:
CP*=50% Th1=29% Th2=70%
Ll=10% Lu=30% Смещение 'w'=5%
Поэтому, изменений состояния не было, и следящий порог Th1 был урезан до 30. Переходное окно осталось на отпущенной стороне положения педали сцепления, так что следящий порог остается на стороне положения педали сцепления, в котором изменение состояния будет происходить, если он пересечен.
Переход T3 в котором CP переходит с 50% на 100%
Где:
CP*=100% Th1=30% Th2=70%
Ll=10% Lu=30% Смещение 'w'=5%
Было изменение состояния из нажатого в отжатое, так как верхний фиксированный порог Th2 был пересечен, и следящий порог Th1 был урезан до 30. Переходное окно остается на стороне положения педали сцепления, в котором изменение состояния будет происходить, если оно пересечено.
Переход T4 в котором CP переходит с 0% на 14%
Где:
CP*=14% Th1=10% (Вследствие урезания)
Th2=70% Ll=10% Lu=30%
Смещение 'w'=5%
Было изменение состояния с отпущенного на нажатое, так как нижний предел Ll был пересечен, и следящий порог Th1 остается на 10. Переходное окно остается на стороне положения педали сцепления, в котором изменение состояния будет происходить, если оно пересечено, но перекинулось по сравнению со своим исходным положением, теперь оно лежит с отпущенной стороны положения педали сцепления.
Переход T4 в котором CP переходит с 14% на 18%
Где:
CP*=18% Th1=10% (Вследствие урезания) Th2=70%
Ll=10% Lu=30% Смещение 'w'=5%
Состояние педали сцепления остается нажатым, так как ведомый порог не был пересечен, так как положение педали сцепления перемещается от ведомого порога Th1. Порок Th1 теперь отнесен на 5% от положения педали сцепления к стороне положения педали сцепления, которое, если пересечено, вызывало бы изменение состояния.
Переход T4 в котором CP переходит с 18% на 24%
Где:
CP*=24% Th1=13% Th2=70%
Ll=10% Lu=30% Смещение 'w'=5%
Состояние положения педали сцепления осталось неизменным, и ведомый порог отследил положение педали сцепления, чтобы остаться смещенным на 5% от него. Переходное окно лежит с отпущенной стороны положения педали сцепления.
Отметим, что, в этом состоянии, ведомый порог расположен с отпущенной стороны положения педали сцепления в местоположении 19%, тогда как, в случае перехода 1, что касается того же самого положения педали сцепления, ведомый порог лежит с нажатой стороны положения педали сцепления в местоположении 29%.
Переход T5 в котором CP переходит с 24% на 18%
Где:
CP*=18% Th1=19% Th2=70%
Ll=10% Lu=30% Смещение 'w'=5%
Так как ведомый порог Th1 было пересечен, состояние изменилось с нажатого на отпущенное, но порог не был перемещен, так как положение педали сцепления не находится более чем на 5% ниже, чем текущее положение ведомого порога. Отметим, что переходное окно теперь лежит с нажатой стороны положения педали сцепления, перекинувшись, когда был пересечен ведомый порог Th1. Отметим, что, на практике, зона гистерезиса была бы предусмотрена, так чтобы небольшие изменения обратно по направлению к нажатому состоянию не вызывали бы многократного переключения.
Переход T5 в котором CP переходит с 18% на 12%
Где:
CP*=12% Th1=19% Th2=70%
Ll=10% Lu=30% Смещение 'w'=5%
Не произошло никаких изменений состояния, и переходное окно остается на нажатой стороне положения педали сцепления, но ведомый порог начал отслеживать положение педали сцепления, с тем чтобы оставаться позади от него на 5%.
Переход T5 в котором CP переходит с 12% на 0%
Где:
CP*=0% Th1=17% Th2=70%
Ll=10% Lu=30% Смещение 'w'=5%
Состояние положения педали сцепления не изменилось, и переходное окно остается с нажатой стороны положения педали сцепления, но ведомый порог ограничен, чтобы оставаться на 10%.
Переход T6, в котором CP переходит со 24% на 28%
Где:
CP*=28% Th1=19% Th2=70%
Ll=10% Lu=30% Смещение 'w'=5%
Не было никаких изменений состояния, но ведомый порог переместился, с тем чтобы отслеживать положение педали сцепления.
Переход T6, в котором CP переходит со 28% на 50% Где:
CP*=50% Th1=23% Th2=70%
Ll=10% Lu=30% Смещение 'w'=5%
Не было никакого изменения состояния, переходное окно по-прежнему лежит с отпущенной стороны положения педали сцепления, но ведомый порог теперь фиксирован у верхнего предела Lu вследствие урезания.
Переход T6, в котором CP переходит со 50% на 100%
Где:
CP*=100% Th1=30% Th2=70%
Ll=10% Lu=30% Смещение 'w'=5%
Ведомый порог Th1 остается ограничен урезанием на верхнем пределе Lu, но было изменение состояния, обусловленное положением педали сцепления, пересекающим фиксированный верхний порог Th2.
В соответствии с вторым вариантом осуществления изобретения, малая коррекция (δ), которая типично могла бы иметь значение 0,01%, производится в отношении положения порога (Th1) в каждом цикле исполнения для перемещения порога от текущего положения педали сцепления (CP). Замысел этого состоит в том, чтобы увеличивать разделение между скользящим порогом Th1 и текущим положением CP педали сцепления вплоть до значения смещения, например, если ступня водителя медленно переместилась до скользящего значения Th1. Непреднамеренные изменения положения педали сцепления часто называются как 'медленное перемещение' педали сцепления. Воздействие коррекции пренебрежимо мало по сравнению с изменениями, являющимися результатом нормальных перемещений педали, но предотвращает возникновение некорректных изменений состояния скорее вследствие постепенного медленного перемещения, нежели реального намерения водителя.
Блок-схема последовательности операций способа на фиг. 5 подробнее показывает второй вариант осуществления способа, использующего динамическую функцию сцепления с добавленной коррекцией 'медленного перемещения'.
Способ начинается на этапе 200, на котором моторное транспортное средство 5 не является работающим, затем, на этапе 205, возникает событие включения ключа зажигания, включающее питание к системам моторного транспортного средства и, в частности, к электронному блоку 16 управления, датчику 26 педали сцепления и EC3P 16C.
Затем, на этапе 210, EC3P 16C инициализируется установкой Th1 равным фиксированному верхнему пределу Lu, а именно, 30%, это обычно достигается гарантированием, что педаль 25 сцепления была полностью отжата, перед тем, как способ может начинаться в буквальном смысле. То есть, на практике, есть дополнительный этап 207 (не показан), на котором проверяется, была ли педаль 25 сцепления полностью отжата, и, если не была, способ возвращается к началу цикла на этап 205, а если была, способ продвигается на этап 210 с ведомым порогом, установленным в Lu. После этапа 210, способ продвигается на этап 215 принятия решения.
На этапе 215 принятия решения, текущее положение педали сцепления (CP) сравнивается со скользящим порогом Th1. Если CP является таким же или большим, чем Th1, то результат состоит в том, чтобы продвигаться на этап 220, а если CP является меньшим, чем Th1, способ продвигается на этап 230.
Рассматривая первым случай, где CP является большим чем или равным скользящему порогу Th1, способ продолжается на этапе 220 сравнением CP с Th2, которое является более низким порогом для отжатой зоны. Если CP является большим или равным Th2, состояние разрешается на этапе 224 в качестве являющегося 'Отжатым', и соответствующий вывод управления выдается электронным блоком 16 управления, и, если CP является меньшим, чем Th2, состояние разрешается на этапе 222 в качестве являющегося 'Нажатым', и соответствующий вывод управления выдается к электронному блоку 16 управления.
Затем, с этапов 222 и 224 способ продвигается на этап 225, где временный порог Thresh_tmp устанавливается равным CP минус переходное смещение (w%).
Способ продвигается на этап 227, где временный порог Thresh_tmp сравнивается с текущим значением следящего порога Th1 минус коррекция δ сползания и, если значение Thresh_tmp является большим, чем Th1 минус δ, способ продвигается на этап 229, где Th1 устанавливается в Thresh_tmp, а если, на этапе 227, Thresh_tmp не является большим, чем Th1 минус δ, то, на этапе 228, Th1 устанавливается в Th1 минус δ.
Возвращаясь на этап 230, где состояние разрешается в качестве являющегося 'Отпущенным', и соответствующий вывод управления выдается из EC3P 16C к электронному блоку 16 управления, способ продвигается с этапа 230 на этап 232.
На этапе 232, временный порог Thresh_tmp устанавливается равным CP плюс переходное смещение (w%).
Способ продвигается на этап 235, где временный порог Thresh_tmp сравнивается с текущим значением следящего порога Th1 плюс коррекция δ сползания и, если значение Thresh_tmp является меньшим, чем Th1 плюс δ, способ продвигается на этап 239, где Th1 устанавливается в Thresh_tmp, а если, на этапе 235, значение Thresh_tmp не является меньшим, чем Th1 плюс δ, то, на этапе 237, Th1 устанавливается в Th1 плюс δ.
Следуя с любого из этапов 228, 229, 237 и 239, способ продвигается на этап 240, где убеждаются, что значение Th1, выведенное с предыдущего этапа 228 или 229, или 237, или 239, находится в рамках верхнего и нижнего пределов Lu и Ll, соответственно. То есть, если Th1 больше Lu, его значение уменьшается, чтобы быть равным Lu, и, подобным образом, если значение Th1 является меньшим, чем Ll, его значение увеличивается, чтобы быть равным Ll.
Способ затем продвигается с этапа 240 на этап 250, где проверяется, присутствует ли до сих пор состояние включенного ключа зажигания. Если состояние 'включенного ключа зажигания' до сих пор присутствует, указывая, что питание остается включенным, то способ возвращается на этап 215, и повторяются этапы с 215 по 250, иначе, он заканчивается на этапе 260. Этапы с 215 по 250 способа повторно выполняются каждые от 20 до 50 мс, если только остается включенным питание.
Специалистами в данной области техники следует принять во внимание, что, хотя изобретение было описано в качестве примера со ссылкой на один или более вариантов осуществления, оно не ограничено раскрытыми вариантами осуществления, и что одна или более модификаций в отношении раскрытых вариантов осуществления или альтернативных вариантов осуществления могли бы быть придуманы, не выходя из объема изобретения.
Например, состояние зацепления сцепления могло бы логически выводиться не непосредственно по педали сцепления, но по рычагу механизма выключения сцепления или другой части механизма выключения сцепления.
Хотя изобретение было описано выше в отношении использования простого одиночного значения для порога между Нажатой и Отпущенной областями, специалистами в данной области техники следует принять во внимание, что как логически выведено выше, одиночное значение для скользящего порога может быть благоприятно заменено двумя значениями, работающими в качестве гистерезисной пары. Таким образом, порог из Нажатого в Отпущенное было бы слегка отличным от порога из Отпущенного в Нажатое, и это предотвращало бы быстрое изменение указываемого состояния педали сцепления между Отпущенным и Нажатым, или наоборот, если педаль удерживалась близко к скользящему порогу.
Более того, хотя изобретение было описано со ссылкой на особенно полезное использование в отношении системы пуска-останова моторного транспортного средства, следует принять во внимание, что другие основанные на моторном транспортном средстве системы могут требовать указания положения педали сцепления, и что изобретение может быть применено к любым таким использованиям моторного транспортного средства, где требуется состояние положения педали сцепления.
Реферат
Изобретение относится к трансмиссии транспортного средства. В способе выработки вывода управления из системы считывания положения сцепления контролируют положение педали сцепления, определяют переходную зону, определенную диапазоном положений педали сцепления, в которых вывод управления является одним из двух альтернативных состояний положения педали сцепления, содержащих отпущенное состояние педали сцепления и нажатое состояние педали сцепления. Также устанавливают смещение скользящего порога от начального положения педали сцепления, который, если пересекается, когда положение педали сцепления находится в пределах переходной зоны, вызывает изменение состояния положения педали сцепления и вывода управления с текущего состояния на альтернативное состояние, если пересечен скользящий порог. Улучшаются характеристики пуска-останова двигателя. 3 н. и 19 з.п. ф-лы, 7 ил.
Комментарии