Способ и устройство контроля за ходом родов - RU2225165C2
Код документа: RU2225165C2
Чертежи







Описание
Настоящее изобретение относится к способу и устройству контроля за ходом родов.
Нормальные роды обычно делятся на три этапа: первый этап начинается от начала родов и заканчивается, когда происходит полное раскрытие шейки матки; второй этап начинается в этой точке и заканчивается полным рождением младенца, после чего следует третий этап, который заканчивается выходом плаценты. В ходе родов обычно используют либо внешнюю ультразвуковую систему для регистрации частоты сердечных биений ребенка и внешнюю систему для обнаружения сокращений матки матери, либо электронную систему, предназначенную для определения частоты биений сердца ребенка с помощью электрода, присоединенного к голове младенца, и сокращений матки матери с помощью катетера давления, который налагают матери внутри матки.
Однако в течение родов необходимо также контролировать ряд других параметров физиологического состояния матери и младенца для определения хода родов. Эти дополнительные параметры состояния включают: (1) изглаживание (утончение шейки матки, которое происходит перед родами и во время первого этапа родов); (2) раскрытие шейки матки (увеличение в размере отверстия шейки матки); (3) положение шейки матки (положение шейки матки по отношению к оси влагалища, обычно головки плода); и (4) положение плода (уровень заранее определенной точки части, представляющей плод, относительно таза матери). Более общее определение положения расстояние между макушкой головки плода и позвонками седалищной части позвоночника, которые могут пальпироваться врачом; но более точное определение положения - это расстояние между межтеменным диаметром (МТД) головки плода и тазового входного отверстия матери.
Вышеуказанные условия в общем случае определяются при осмотре врачом, то есть путем ввода пальца во влагалище матери. Однако точность такого исследования "пальцем" очень субъективна и в значительной степени зависит от опыта, квалификации и даже от размера пальца врача. Другие недостатки такого обследования врачом состоят в том, что они могут быть выполнены только в течение некоторых разделенных друг от друга интервалов, они обычно представляют определенное неудобство для матери, и при их применении создается определенный риск, включая внесение загрязнения, инфекции, сбой контроля за плодом, нанесение вреда младенцу и т. д. Неспособность интерпретировать точный этап хода родов путем исследования врачом может привести к ущербу и даже смерти младенца или матери.
В прошлом предлагалось большое количество устройств для автоматического отслеживания этих параметров. Например, в американском Патенте 4476871 предлагается применение удлиненной трубки, имеющей электроды, расположенные на некотором расстоянии вдоль ее длины для отслеживания степени раскрытия шейки матки во время родов; в американских Патентах 4942882 и 5135006 предлагается применять зонд, отслеживающий положение плода, который прикрепляется к головке плода для контроля биения его сердца, причем этот зонд откалиброван таким образом, чтобы было возможно контролировать ход движения; в американском Патенте 5222485 предлагается использовать удлиненный надуваемый мешок для отслеживания положения плода и конфигурации шейки матки; и в американском Патенте 5406961 для отслеживания конфигурации шейки матки предлагается использовать пессарий (маточное кольцо). Однако по той или другой причине, ни одно из ранее предлагавшихся устройств не получило широкого распространения в использовании, и традиционное исследование "пальцем" до настоящего времени продолжает оставаться одной из наиболее часто используемых методик.
Краткое описание изобретения
Задачей настоящего изобретения
является создание способа и устройства, которые имели бы преимущество по сравнению с обычной методикой исследования "пальцем", предназначенные для отслеживания хода родов матери во время рождения
ребенка.
В соответствии с одним аспектом настоящего изобретения предлагается способ отслеживания хода родов матери во время рождения ребенка, содержит операции присоединения датчика положения к заранее определенной точке костей таза матери; отслеживания положения датчика положения в трехмерном пространстве по отношению к точке отсчета; и отслеживания положения части, представляющей плод, по отношению к заранее определенной точке костей таза матери для получения индикации хода родов.
Ниже, с целью примера, описаны три варианта воплощения настоящего изобретения. В одном варианте воплощения, положение части, представляющей плод, а также противоположных краев конца шейки матки матери отслеживаются с помощью датчиков положения, которые присоединяются к этим соответствующим элементам. Во втором описанном варианте воплощения положение последних отслеживается с помощью ультразвукового преобразователя, который предназначен для создания изображения шейки матки матери и костей таза, а также головки плода на экране с использованием в ультразвуковом преобразователе датчика положения, а также маркера для получения на экране отметки, предназначенной для определения положения этих элементов. Описан также третий вариант воплощения, в котором используются четыре датчика положения, установленные на соответствующие части тела матери, и часть, представляющую плод, а также пятый датчик положения, который подключен к ультразвуковому преобразователю и предназначен для получения изображения и для определения положения шейки матки матери и костей таза, а также головки плода.
В соответствии с другими признаками в описанных первом и третьем вариантах воплощения, степень раскрытия шейки матки матери постоянно индицируется путем постоянного контроля сигналов датчиков положения, которые размещены на противоположных краях конца шейки матки, и путем постоянного отображения пространственного расстояния между ними. Положение части, представляющей плод (например, головки плода), также постоянно индицируется путем ее постоянного отслеживания и отображения ее относительного положения.
В соответствии с другими признаками описанных предпочтительных вариантов воплощения вышеупомянутые условия вводятся в компьютер и отображаются в форме единиц расстояния (например, см) и/или в виде графика, который называется Партограммой, и показывает взаимосвязь между степенью раскрытия шейки матки и степенью опускания части, представляющей плод.
В соответствии с другим аспектом настоящего изобретения предлагается устройство для отслеживания хода родов в матери во время рождения ребенка, содержащее: датчик положения, предназначенный для присоединения к заранее определенной точке на костях таза матери и получения выходного сигнала, идентифицирующего его положение в пространстве, средство определения положения части, представляющей плод, по отношению к заранее определенной точке на костях таза матери и получения выходного сигнала, идентифицирующего положение части, представляющей плод, компьютер, присоединенный таким образом, что он может принимать эти выходные сигналы, и выходное устройство, управляемое компьютером для вывода положения части, представляющей плод, по отношению к заранее определенной точке на костях таза матери.
В качестве выходного устройства предпочтительно используется дисплей, но им может быть графопостроитель, записывающее устройство или другое устройство для отображения, записи и/или обработки данных, выводимых компьютером.
Как будет описано более конкретно ниже, такой способ и устройство позволяют отслеживать ход родов в таком виде, который является скорее непрерывным, чем предоставляет данные, полученные через определенные интервалы, который в отношении точности в меньшей степени зависит от опыта, квалификации или размера пальца обслуживающего персонала, как при обычном "обследовании пальцем", который представляет меньше неудобств для матери и применение которого приводит к меньшему риску внесения загрязнения, инфекции, сбою в отслеживании плода, или нанесения вреда или смерти младенца или матери из-за неправильной оценки положения плода или хода родов. Кроме того, такая технология позволяет более точно отслеживать критические состояния, а именно изменения в пространственном расстоянии МТД головки плода по отношению к входному отверстию таза.
Другие признаки и преимущества настоящего изобретения будут очевидны из приведенного ниже описания.
Краткое
описание чертежей
Настоящее изобретение описано ниже на конкретном примере осуществления со ссылками на прилагаемые чертежи, на которых:
фиг. 1 изображает блок-схему, иллюстрирующую
один из вариантов устройства, выполненного в соответствии с настоящим изобретением;
фиг.2 - один из датчиков положения, применяемых в устройстве по фиг.1;
фиг. 3 - блок-схему одного
типа датчика положения, который может быть использован в устройстве;
фиг.4 - Партограмму, получаемую с помощью устройства по фиг.1;
фиг.5 - блок-схему устройства получения
изображения матки матери, в частности шейки матки, костей таза и головки плода для лучшего отображения хода родов;
фиг. 6А-6D - типичные изображения, получаемые с помощью устройства по фиг.5
во время различных этапов хода родов;
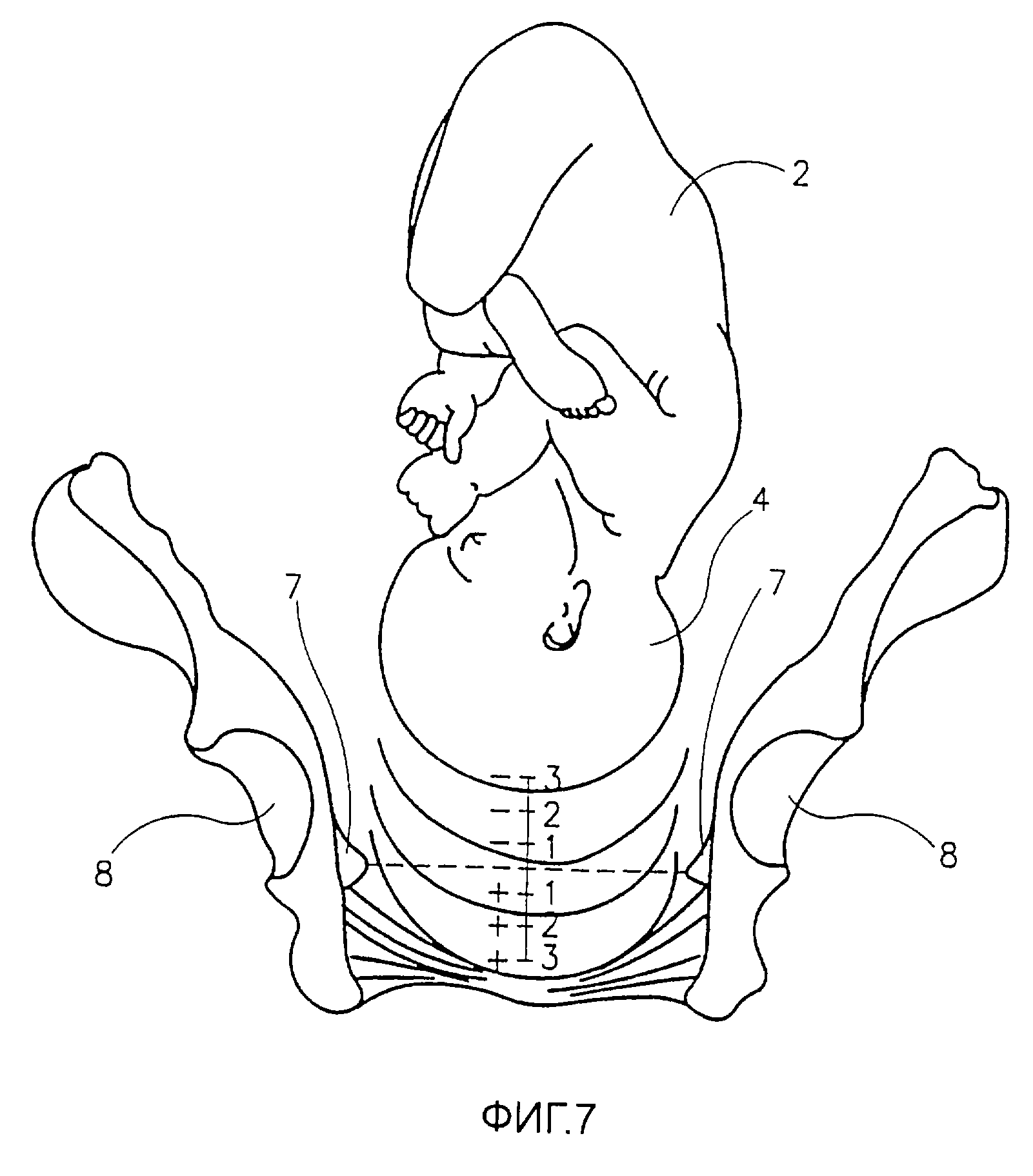
фиг. 7 - типичное изображение, получаемое с помощью устройства по фиг.5 во время опускания головки плода;
фиг. 8 - как отображаемые данные могут
быть обработаны для отображения изменения в пространственном расстоянии МТД головки плода по отношению к входному отверстию таза матери;
фиг. 9 - кривые биения сердца плода и маточных
сокращений, которые могут быть получены с помощью вышеописанных устройств по фиг.1 и 5.
Описание предпочтительных вариантов воплощения
На фиг.1 схематически изображена утроба
1 матери во время родов с плодом 2 в нормальном положении в матке 3, при котором головка 4 плода ориентирована по направлению вниз и готова выйти через шейку 5 матки. Шейка 5 матки расширена и
изглажена при подготовке для прохода плода 2 через канал шейки матки и полость влагалища. Различные этапы опускания головки плода во время выхода могут быть измерены по отношению к седалищным
позвонкам или входному отверстию 8а таза костей 8 таза.
Ход родов контролируется с помощью множества датчиков положения, присоединенных к головке плода и к частям утробы матери и таза следующим образом: первый датчик PS1 исходного положения присоединен к одной из костей 8 таза на известном расстоянии от седалищных позвонков и входного отверстия 8а таза; второй датчик PS2 положения присоединен к головке 4 плода (или другой представляющей части будущего ребенка, если она не является головкой плода); третий и четвертый датчики PS3, PS4 положения присоединены к противоположным краям внешнего отверстия шейки 5 матки.
Первый датчик PS1 положения присоединен к одной из костей 8 таза таким образом, что
позволяет компьютеру составить план таза и отслеживать его движение, в частности, движение входного отверстия таза. Ниже приведена процедура, которая может использоваться для этой цели:
(а)
матери предлагают не двигаться;
(b) датчик PS1 присоединяют к одной известной точке таза, например к левому переднему верхнему позвонку (наивысшей точке кости на левой стороне на
уровне сужения), и используют его для идентификации этой точки компьютером;
(c) датчик PS1 присоединяют ко второй известной точке, например к центральный точке лобкового симфиза
(кость таза на передней стороне тела), и эта точка также идентифицируется компьютером;
(d) датчик PS1 присоединяют к третьей точке, например к правому переднему верхнему позвонку,
и эта точка также идентифицируется компьютером;
(e) основываясь на вышеприведенных трех точках, компьютер теперь может вычислять общее пространственное положение таза; и, наконец,
(f) датчик PS1 прочно присоединяют к последней (третьей) точке так, что с этого момента он не передвигается и не вращается по отношению к костям таза.
Компьютер может теперь отслеживать каждое движение таза, и, таким образом, может непрерывно контролировать пространственное положение всего таза, в частности, входного отверстия таза.
Каждый из датчиков положения PS1-PS4 прикрепляется любым подходящим способом (например, с помощью швов, зажимов, присосок и т.д.) к соответствующим поверхностям. Каждый из них может точно отслеживать свое положение и ориентацию в трехмерном пространстве по отношению к точке отсчета. Датчик положения может также находиться на одном из концов твердого стержня или другого держателя, который прикрепляется другим концом к соответствующей поверхности.
Известно много типов датчиков положения, предназначенных для применения с этой целью. В иллюстрируемом примере
применяются датчики PS1-PS4 положения типа датчиков магнитного поля, как описано, например, в родственном американском патенте 4945305. Их выходные сигналы, которые инициируются
передатчиком 10, позволяют вычислить точное положение датчика компьютером 12, который присоединен таким образом, что он принимает выходные сигналы датчиков положения, а также сигналы, передаваемые
передатчиком 10. Компьютер 12 вычисляет точное положение и ориентацию каждого из датчиков PS1-PS4, и на основе этих вычислений управляет отображением, которое представлено
дисплеями 14 и 16, для отображения различных физиологических параметров состояния матери и ребенка во время родов, в частности следующих параметров:
1. Изглаживание: это - процесс утонения
шейки матки, который происходит перед и во время первого этапа родов. Шейка матки утончается посредством втягивания с тем, чтобы предоставить большее пространство для хода родов. Изглаживание
выражается в процентах, от нуля процентов (неизглаженная) до ста процентов (толщина шейки матки меньше приблизительно 0,25 см). В системе, изображенной на фиг.1, изглаживание вычисляется и
отображается на позиции 14а как пространственное расстояние между датчиком PS2 положения, который прикреплен к головке плода, и центральной точкой на линии, соединяющей два датчика PS3, PS4 положения, которые присоединены к концам шейки 5 матки.
2. Степень раскрытия шейки матки: этот параметр представляет увеличение отверстия шейки 5 матки. Оно считается полностью раскрытым, когда его диаметр составляет 10 см, так как головка плода ребенка, имеющего нормальные размеры к сроку окончания беременности, обычно может проходить через отверстие шейки матки такого диаметра. В устройстве, изображенном на фиг.1, раскрытие шейки матки вычисляется и отображается на позиции 14b как пространственное расстояние между двумя датчиками PS3, PS4 положения, которые присоединены к противоположным краям шейки 5 матки.
3. Положение шейки матки: этот параметр представляет собой передний-задний наклон шейки матки. В данном случае он измеряется как ориентация центральной оси шейки матки, которая представляет собой линию, соединяющую датчик PS2 положения, присоединенный к представительной части плода, и среднюю точку линии, соединяющей два датчика РS3, PS4 положения, которые присоединены к противоположным краям шейки матки. Исходная ориентация оси шейки матки измеряется в начале родов, и ход изменения положения шейки матки индицируется как относительный угол между осью шейки матки в любой данный момент времени по отношению к углу исходной ориентации. Врач может обозначать любой диапазон углов как "передний", "средний" или "задний".
В качестве альтернативы, положение шейки матки может быть обозначено как расстояние между лобковым симфизом, из положения определяемого датчиком PS1, и средней точкой линии, соединяющей два датчика РS3, PS4 положения, которые присоединены к противоположным краям шейки матки.
4. Положение: этот параметр представляет собой положение головки плода (или другой представляющей части) по отношению к заранее определенной точке таза матери. Как было указано ранее, обычное положение представляет собой расстояние между макушкой головки плода и седалищными позвонками; но более точный способ измерения положения может представлять собой измерение расстояния между МТД и входным отверстием таза. В устройстве, изображенном на фиг. 1, положение может вычисляться и отображаться обычным способом на основании расстояния между макушкой головки плода и седалищными позвонками, как показано на фиг. 7, или более точным способом, основывающимся на пространственном расстоянии МТД от входного отверстия таза, как показано на фиг. 8.
Как было указано ранее, датчики PS1-PS4 положения могут быть любого известного типа. На фиг.2 схематически изображен один из таких датчиков PS положения. Он включает треугольную антенну из трех разнесенных в пространстве магнитных катушек 21, 22, 23, каждая из которых расположена на точно известном расстоянии от центральной точки 24 датчика положения. Таким образом, определяя положение и ориентацию этих трех катушек 21-23 по отношению к точке отсчета, может быть определено положение центральной точки 24 датчика PS положения по отношению к этой точке отсчета.
Примером датчика положения, который может быть использован, является датчик, описанный в родственном американском Патенте 4945305. Такой датчик, блок-схема которого изображена на фиг.3, позволяет точно измерять положение (местоположение и ориентацию) в шести степенях свободы приемной антенны 30 по отношению к передающей антенне 31, в которой используются импульсные магнитные сигналы постоянного тока. Передающие и принимающие компоненты содержат две или большее количество приемных антенн с известным местоположением и ориентацией по отношению друг к другу. Передающие антенны 31 включаются по одной одновременно (с помощью пульсирующего сигнала постоянного тока) от схемы 32 возбуждения постоянного тока. Приемная антенна 30 измеряет передаваемые магнитные поля постоянного тока, а также магнитное поле Земли посредством процессора 33 сигнала и передает эту информацию в компьютер 34, который таким образом определяет положение приемной антенны 30.
Другие детали конструкции и работы такого типа датчиков положения описаны в американском Патенте 4945305, который приведен здесь в качестве ссылки. Могут использоваться другие типы датчиков на основе магнитного поля, например датчик, основанный на использовании полей переменного тока, такой как описан в патентах, указанных при описании известного уровня техники в родственном патенте.
Другой тип датчиков положения, который может использоваться в качестве датчика PS1-PS4 положения, представляет собой датчик производства компании Полхемус Инк. (Polhemus Inc. ) или компании Асеншен Текнолоджи Корпорэйшн (Ascension Technology Corporation), обе расположены в городе Берлингтон, штат Вермонт, США (Burlington, VT, USA). В такого типа датчиках последовательно передаются три взаимно перпендикулярных магнитных поля, и три катушки, расположенные во взаимно перпендикулярных направлениях, применяются для приема отдельных магнитных полей. Компьютер используется для вычисления пространственного положения и ориентации комбинированных катушек.
Еще одним типом датчика положения, который может быть использован, являются датчики производства компании Эдэптив Оптикс Ассошиэйтс Инк., город Кембридж, штат Миннесота, США (Adaptive Optics Associates, Inc., of Cambridge, MA, USA). Эти датчики включают множество источников света, которые присоединяются к объекту, положение и ориентация которого должна быть определена, и множество камер, расположенных в известных положениях в пространстве, которые предназначены для приема света, испускаемого источниками света. Компьютер комбинирует все данные и вычисляет положение и ориентацию объекта.
Еще один тип датчиков положения, который может использоваться, представляет собой систему производства компании Сайенс Аксесориз Корпорейшн, город Ньюхейвн, штат Коннектикут, США (Science Accessories Corporation of Newhaven, CT, USA). Она включает ультразвуковой источник, прикрепленный к определенной точке объекта, положение которого требуется измерять, и множество микрофонов, расположенных в известных местах в пространстве, предназначенных для приема звука, испускаемого источником ультразвука. Компьютер комбинирует все данные и вычисляет положение объекта. При присоединении к объекту множества разнесенных в пространстве излучателей ультразвука его ориентация может вычисляться путем комбинирования данных о положении каждого из излучателей.
Применяются датчики беспроводного типа с тем, чтобы минимизировать их влияние на процесс рождения. Однако в некоторых случаях может быть предпочтительно использовать механические системы позиционирования, которые основываются на манипуляторах, физически присоединенных к отслеживаемым объектам, и которые снабжены механическими датчиками в соединениях (которые кодируются устройствами вращения), которые позволяют выполнить точное определение пространственного положения отслеживаемых объектов.
Компьютер 12 (фиг.1), который принимает данные, соответствующие положению датчиков PS1-PS4 положения, обрабатывает эти данные с тем, чтобы обеспечить получение требуемого изображения. На фиг.1 показаны два типа дисплеев 14, 16. На дисплее 14 отображается каждый параметр, утонение, степень раскрытия шейки матки, положение шейки матки, положение и/или расстояние МКД в форме единиц расстояния (например, см). Дисплей 16, однако, представляет Партограмму, на которой степень раскрытия шейки матки и положение отображаются в графической форме как функция времени для показа взаимосвязи степени раскрытия шейки матки и опускания головки плода (или другой представляющей части), и на которой сглаживание и положение шейки матки также могут отображаться аналогичным образом.
Дисплей 16 Партограммы, которая более подробно показана на фиг.4, имеет особое значение, так как представляет визуальное отображение хода родов, которое может быть записано, если это необходимо. Используя Партограмму, можно лучше определять, проходят ли роды нормально. Линии "тревоги" и "действия" могут быть напечатаны на Партограмме для обеспечения визуальной индикации того, проходят ли роды нормально или ненормально, и, таким образом, лучше указывать обслуживающему персоналу на необходимость предпринять незамедлительные действия в случае необходимости. Такая "электронная Партограмма" может также заметно снизить количество затяжных родов, пропорцию внутриутробных, послеродовых и ранних неонатальных инфекций, количество ненужных вмешательств и травм новорожденных из-за неправильной оценки положения головки плода.
На фиг.5 изображена блок-схема устройства контроля, аналогичного устройству, изображенному на фиг.1, но в которое дополнительно включена система отображения, предназначенная для получения изображения области утробы матери и для непрерывного показа шейки матки матери, костей таза и головки плода (или другой представляющей части).
В соответствии с этим устройство, изображенное на фиг.5, включает ультразвуковой преобразователь 40, предназначенный для получения изображения области утробы через компьютер 12 на дисплее 42 изображения. Она также включает датчик PS5 положения, который прикреплен к ультразвуковому преобразователю 40. При этом любая точка изображения на дисплее 42 может быть выбрана устройством 43 маркера, таким как указатель "мышь", или с помощью сенсорного экрана, и ее положение передается в компьютер 12 для идентификации положения соответствующих точек по отношению к положению датчика PS1 положения, прикрепленного к лобковым костям матери. По этой информации компьютер 12 может вычислять различные взаимозависимости, которые отображаются на дисплеях 14 и 16, благодаря чему отпадает необходимость применения датчиков PS2, РS3 и PS4 положения. Изображение, показываемое на дисплее 42, может использоваться таким же образом для маркировки МТД на головке плода, как показано на фиг.8, позволяя таким образом вычислять и отображать пространственное расстояние между МТД плода и входным отверстием таза.
Желательно, чтобы другие точки отсчета, кроме МТД или макушки головки плода, а также любые другие точки таза матери, могли использоваться в качестве точек отсчета для контроля за ходом родов. Эта свобода выбора важна из-за многообразия предпочтений в методиках разных врачей.
Система отображения, показанная на фиг.5, может также использоваться для получения визуального изображения различных этапов хода родов, например, как изображено на фигурах 6А-6D, которые показывают ход раскрытия и изглаживания шейки матки, или как показано на фигурах 7 и 8, которые изображают последовательное опускание макушки головки плода через различные положения по отношению к седалищным позвонкам 7 (фиг.7) или по отношению к входному отверстию таза матери (фиг.8).
Если система получения изображения используется вместе со всеми пятью датчиками PS1-PS5 положения, изображенными на фиг.5, ультразвуковое изображение может использоваться только для измерения МТД в начале родов или позже. Компьютер затем определяет расстояние между МТД и макушкой головки плода, и после этого он может использовать положение макушки головки плода также для определения положения МТД. Ультразвуковое изображение может после этого использоваться только для проверки, если это требуется. Оно может также использоваться для проверки степени раскрытия шейки матки и ее изглаживания.
Если устройство, изображенное на фиг.5, используется только с ультразвуковым отображением и датчиками PS1 и PS5 положения, контроль предпочтительно может выполняться не непрерывно, а только через определенные промежутки, то есть только когда требуется контролировать определенный этап хода родов.
Устройство, изображенное на фиг.5, может также использоваться для определения сокращений матки матери. При этом во время сокращений головка плода слегка передвигается, и степень раскрытия матки несколько увеличивается; а после сокращений оба эти параметра возвращаются в их предыдущее положение. Таким образом, наблюдая раскрытие и/или положение головки плода, как функцию времени, обслуживающий врач может наблюдать наличие сокращений, а также продолжительность и силу таких сокращений. Кроме того, благодаря вводу датчика биения сердца в датчик РS2 положения, который укрепляется на головке плода, врач может наблюдать соотношение частоты сердечных сокращений плода (ЧСС) по отношению к сокращениям матки (СМ), чтобы показать связь между этими величинами, как изображено на фиг.9. Компьютер 12 может быть запрограммирован для приема вышеуказанной информации от различных датчиков и для отображения на мониторе 45 изображения, соответствующего частоте сердечных сокращений плода (ЧСС) по отношению к сокращениям матки (СМ), как показано на фиг. 9. Такая информация особенно необходима, если установлены или есть опасения наличия осложнений.
Хотя на чертежах изображены отдельные показания, было бы желательно, чтобы эти показания были выполнены в форме окон на одном и том же большом экране компьютера.
Хотя настоящее изобретение было описано по отношению к ряду предпочтительных вариантов воплощения, очевидно, что они приведены только с целью примера, и что могут быть выполнены много других изменений, модификаций и вариантов применения настоящего изобретения.
Реферат
Изобретение относится к медицине, в частности к акушерству. Способ обеспечивает более точное отслеживание критических состояний во время родов. Отображение хода родов матери во время рождения ребенка осуществляется путем прикрепления датчика положения к заранее определенной точке на костях таза матери, контроля за положением датчика в трехмерном пространстве по отношению к точке отсчета и контроля за положением части плода, по отношению к заранее определенной точке на костях таза матери. Положение части плода может быть индицировано аналогичным датчиком положения или с помощью получения изображения. Другие параметры состояния, такие как степень изглаживания, степень раскрытия шейки матки и положение матки, могут также контролироваться аналогичным образом. Устройство, обеспечивающее мониторинг за ходом родов, содержит датчик положения, предназначенный для присоединения к заранее заданной точке на костях таза матери, компьютер для приема выходных сигналов и выходное устройство, управляемое компьютером для вывода показаний положения части плода по отношению к заранее заданной точке костей таза матери. 2 с. и 34 з.п.ф-лы, 9 ил.

Комментарии