Устройство для управления здоровьем - RU2417810C2
Код документа: RU2417810C2
Чертежи


Описание
Настоящее изобретение относится к системе и способу для реабилитации и/или физиотерапии для лечения нервно-мышечных расстройств, например инсульта. После инсульта пациенты часто страдают от нарушений в двигательной координации. Эти нарушения являются менее всего изученными, но часто наиболее ослабляющими по отношению к функциональному восстановлению после черепно-мозговой травмы. Эти поражения в координации выражаются в виде анормальных совместных действий мышц и приводят к ограниченным и стереотипным шаблонам перемещения, которые являются функционально блокирующими. Результатом этих ограничений в совместных действиях мышц является, например, анормальная связь между отведением (абдукцией) плеча и сгибанием локтя в руке, которая значительно сокращает у пережившего инсульт пространство, до которого можно дотянуться, когда он/она поднимает вес ослабленной руки с преодолением силы тяжести. Имеющиеся нейротерапевтические подходы для смягчения этих анормальных совместных действий дали ограниченное функциональное восстановление. В ноге выражение анормальных совместных действий приводит к связанности разгибания бедра/колена с приведением бедра. Результатом этого является ограниченная возможность приведения в действие мышц, отводящих бедро в ослабленной ноге во время пребывания в какой-либо позиции.
Когда традиционное лечение предоставляется в больнице или реабилитационном центре, пациент обычно наблюдается в течение получасовых сеансов, один или два раза в день. Это сокращается до одного или двух раз в неделю при амбулаторном лечении.
Имеющиеся исследования указывают, что двигательные упражнения (нагрузки) для улучшения координации пациента могут выполняться дома как часть решения по удаленной реабилитации. Доступные системы используют метод видеоконференций, где пациент упражняется перед камерой в удобное для него время. Такая система, например, раскрывается в US 2002/0146672 A1. Эта система включает в себя устройство, которое воспринимает положение пальцев руки пользователя, в то время как пользователь выполняет упражнение путем взаимодействия с виртуальным изображением. Второе устройство обеспечивает обратную связь пользователю и измеряет положение пальцев руки, в то время как пользователь выполняет упражнение путем взаимодействия с виртуальным изображением. Виртуальное изображение обновляется на основе целей, определенных для эффективности (выполнения упражнений) пользователя, чтобы обеспечить более сложные или более легкие упражнения. Соответственно, не имеет значения, насколько ограничены перемещения пользователей, если эффективности пользователей попадают в удерживаемый диапазон параметра, пользователь может пройти испытание упражнением, и уровень сложности может постепенно увеличиваться.
Данные об эффективности пользователя сохраняются и анализируются врачом. Поэтому реабилитационная система распределяется между реабилитационным узлом, узлом хранения данных и узлом доступа к данным посредством Интернет-соединения между узлами. Узел доступа к данным включает в себя программное обеспечение, которое позволяет доктору/врачу невропатологу следить в реальном масштабе времени за упражнениями, выполняемыми пациентом, используя графическое изображение руки, с помощью отправки записанных видеоизображений доктору или физиотерапевту, который анализирует упражнения и дает обратную связь. Существует некоторое количество пассивных и активных устройств, например, Theraband или Reck MotoMe, которые дают пользователю возможность выполнять такие тренировки дома как часть решения по удаленной реабилитации.
Одной из наиболее заметных недееспособностей, от которой страдают пережившие инсульт, является односторонний паралич верхних конечностей. Реабилитационные упражнения подтверждены как эффективные в восстановлении управления движениями при условии, что тренировка интенсивна, а пациента направляют в лечении. Технические решения для неконтролируемой домашней реабилитации после инсульта требуют использования маркеров или датчиков для обнаружения положения тела пациента во время упражнений.
Очень заманчивым решением для датчиков является использование камер, которые обозревают двумерные (2D) или трехмерные (3D) координаты конечностей и суставов в пространстве в зависимости от того, используется система из одной или нескольких камер. Однако получение положения конечности по положению камеры требует нахождения и отслеживания конечностей на изображении, что на сегодняшний день является нетривиальной задачей и нерешенной проблемой, если не используется никаких маркеров (см., например, "The evolution of methods for the capture of human movement leading markerless motion capture for bio medical applications" (Эволюция способов для захвата перемещения человека, проводимая безмаркерным захватом движения, для биомедицинских применений), Мандермана (Mundermann) и др., журнал "Neuro Engineering and Rehabilitation", 2006, 3:6).
Отслеживание положений маркера с помощью камер одновременно в оптическом и в инфракрасном диапазоне очень надежно. В этой области существует очень много коммерческих изделий.
Проблема с таким подходом заключается в том, что существующие маркерные системы слежения предполагают, что пользователь достаточно квалифицированный, чтобы разместить маркеры на точно воспроизводимые места; таким образом будут получены непротиворечивые результаты. Данное предположение становится нереалистичным, если пользователь является пострадавшим от инсульта. Вместо этого точное положение маркеров на конечностях будет отличаться от одного использования к другому, так как пользователь не имеет возможности закрепить маркеры или датчики точно в том же положении из-за потери управления перемещением его рук, кистей рук и/или пальцев.
Поэтому задача настоящего изобретения - предоставить систему и способ, который обеспечивает надлежащие функциональные возможности системы даже в случае неточного размещения маркеров или датчиков на конечности пользователя.
Эта задача решается с помощью системы и способа согласно пунктам 1 и 7 формулы изобретения.
Система управления здоровьем согласно изобретению содержит средство обнаружения перемещения тела или конечности для обнаружения перемещений тела или конечности(ей) пользователей, средство анализа перемещения для анализа данных измерений, выполненных средством обнаружения перемещения тела или конечности, где средство обнаружения перемещения тела или конечности содержит по меньшей мере три маркера для отслеживания перемещения тела или конечности пользователя. Для анализа перемещения измеряется угол между двумя частями тела пользователя, которые соединены друг с другом с помощью сустава. Сустав образует вершину угла, который необходимо измерить, у которого предусматривается один из маркеров.
Для определения того, размещен ли маркер у сустава точно в правильном положении, измеряется расстояние двух соседних маркеров на конечности пользователя. Изменение расстояния между двумя соседними датчиками или маркерами указывает смещение датчика у сустава, расположенного на расстоянии от вершины угла.
Для вычисления или оценки смещения маркера на суставе средство анализа перемещения может включать в себя программу автоматического усвоения двигательного навыка, в которой программа усвоения двигательного навыка включает в себя алгоритм по следующему уравнению:
x=argmin{0
где Lt=(1+X) (RMarker3-RMarker2).
С помощью этого алгоритма угол сустава по положению маркеров (RMarker3, RMarker2) на конечностях определяется с помощью оценки первого смещения (x) и корректировки предположения путем анализа движения пользователя (см. также фиг.2). Текущие выходные данные маркеров или датчиков указывают уменьшение изменения расстояния между двумя соседними датчиками, пока смещение маркера не сходится к значению, которое находится в пределах точности измерения истинного значения смещения маркера (х=о).
Таким образом, система дает пользователю свободу размещать маркеры на его конечностях с большей степенью свободы и все же получать осмысленное поведение системы.
Автоматическая программа усвоения двигательного навыка может выбрать начальный диапазон смещения в качестве следующего целевого диапазона смещения для каждых следующих серий измерений, в котором упомянутые заранее установленные критерии успеха не удовлетворяются, и текущие выходные данные датчиков могут указывать снижение изменения расстояния между двумя соседними датчиками.
Альтернативный вариант осуществления настоящего изобретения предоставляет вместо автоматической программы усвоения двигательного навыка программу, которая по измерению смещения маркера на суставе формирует стимулирующий сигнал для принуждения пользователя переместить датчики по направлению к вершине угла, образованного между конечностями пользователя, чтобы минимизировать смещение маркера у сустава.
Средство измерения перемещения тела или конечности может быть по меньшей мере одним машинным зрением на основе камеры с маркерами или отслеживанием движения маркеров с помощью машинного зрения и/или одним инерциальным датчиком, по меньшей мере одной оболочкой датчика и/или любым другим датчиком движения или положения. Маркеры могут быть либо цветными маркерами, либо световозвращающими инфракрасными маркерами, в зависимости от того, какие камеры используются.
Система, которая соответствует вышеупомянутым задачам и обеспечивает другие полезные особенности в соответствии с предпочтительным в настоящее время типовым вариантом осуществления изобретения, будет описана далее со ссылкой на фиг. с 1 по 3. Специалисты в данной области техники должны принять во внимание, что описание, приведенное в этом документе по отношению к этим чертежам, предназначено только для поясняющих целей и никоим образом не предназначено для ограничения объема изобретения.
Фиг.1 показывает изменение угла, включающего плечо и предплечье пользователя;
фиг.2 схематически показывает корреляцию угла и размещения маркеров или датчиков;
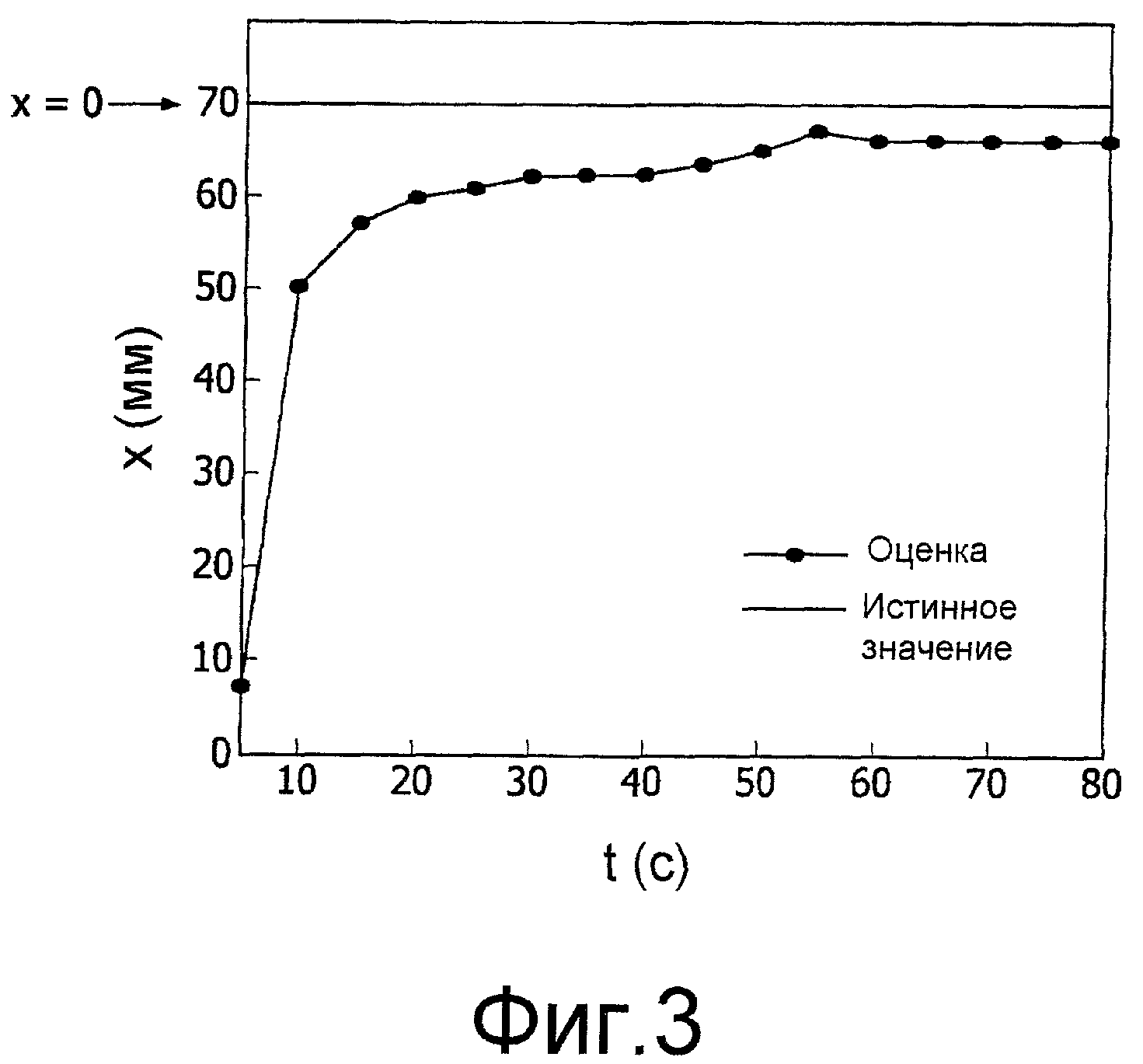
фиг.3 показывает пример кривой обучения смещения маркера.
Как можно увидеть на фиг.1, для примера отслеживания два положения маркера в области сустава указываются с помощью двух разных линий. В одном случае маркер или датчик размещается точно на суставе, так что образованный тремя датчиками или маркерами угол идентичен углу, заложенному плечом и предплечьем. В случае второй линии маркер размещен на плече со смещением. Предположение, что маркер на локте размещен точно на суставе, другими словами, в вершине угла, заложенного плечом и предплечьем, приводит к неверному углу. Если датчик у сустава установлен на расстоянии от вершины на плече, то образованный тремя датчиками угол больше угла в случае точного размещения датчика на суставе. С другой стороны, если датчик у сустава расположен на расстоянии от вершины предплечья, то угол меньше угла точного размещения датчика.
Для получения правильного угла необходимо определить смещение между маркером или датчиком и суставом, которое в случае, показанном на фиг.1, по сравнению с указанным углом, приводит к меньшему углу.
Поэтому система согласно изобретению анализирует данные перемещения и принимает во внимание ограничения человеческого тела. Таким образом, система отслеживания на основе маркера или датчика становится приученной к изменению в помещении маркеров или датчиков.
Для анализа данных перемещения и принятия во внимание ограничений человеческого тела система управления здоровьем в одном варианте осуществления настоящего изобретения включает в себя компьютерную системы с центральным процессором, запоминающим устройством и экраном. Для отслеживания перемещения пользователя в этом варианте осуществления предоставляется камера. Камера может работать в оптическом или инфракрасном диапазоне и подключается к компьютеру. Три маркера размещаются на конечности пациента, в этом примере на руке пользователя. Маркеры или датчики могут быть либо цветными маркерами, либо отражающими маркерами, в зависимости от того, какой тип камеры используется. Один датчик размещается на запястье пользователя, один на плече и один в области сустава, в этом случае на локте. Кроме того, предоставляется запоминающее устройство для обнаруженного движения маркера.
После запуска компьютерной программы для оценки положения тела пациента по изображениям камеры на основе маркеров делается исходное предположение, что смещение между суставом и маркером равно нулю, что означает, что маркер установлен в совершенно правильном положении без какого-либо смещения. Потом пользователь начинает движение, и система записывает перемещение и многократно корректирует предположение о смещении маркера с помощью анализа движения.
Поскольку отсутствует изменение в угле или соотношении датчиков, если маркеры или датчики на запястье или плече не размещены точно в том же положении, не имеет значения, если они размещаются немного выше или ниже по сравнению с прежним использованием или измерением.
Единственно решающим размещением маркера является размещение маркера у сустава конечности, которую нужно исследовать. Поэтому анализируется расстояние между двумя соседними маркерами или датчиками. Если отсутствует изменение в расстоянии между соседними маркерами, то маркер у сустава размещен точно в правильном положении, и измерение может начинаться немедленно без каких-либо дополнительных корректирующих этапов.
Изменение расстояния между двумя соседними маркерами, тем не менее, указывает на наличие смещения в размещении датчика на суставе. Теперь есть две возможности обработки смещения.
Один вариант дает пользователю указание переместить маркер у сустава в направлении сустава. Поэтому предусматривается средство размещения на закрепляющем средстве маркера, например установочные винты, которые дают пользователю, имеющему трудности в точном перемещении его пальцев, возможность точной регулировки маркера путем вращения винта и посредством этого медленного и точного перемещения маркера в правильном направлении к суставу. Если после регулировки маркера у сустава изменение в расстоянии становится больше, это является указанием того, что маркер был перемещен в неправильном направлении, и система может дать указание пользователю повернуть винт в другом направлении.
Со вторым вариантом осуществления перемещение маркера по направлению к суставу даже не является обязательным. Смещение маркера вычисляется и автоматически интегрируется и распознается в анализе перемещения пользователя. В этом случае, во-первых, необходимо вычислить корреляции между движением маркера на плече и маркера в области сустава и маркера на предплечье или запястье и маркера в области сустава, чтобы обнаружить, размещается ли маркер у сустава на плече или на предплечье.
Так как плечо и предплечье относительно негибкие по сути, предполагается более высокая корреляция для маркеров на одной и той же руке. Поэтому, например, если может быть измерено изменение расстояния между двумя соседними датчиками или маркерами между маркером у предплечья и маркером у сустава, это указывает, что маркер у сустава размещается на другой части руки, в этом примере на плече.
Как только известно, на какой руке размещается маркер сустава, нужно оценить смещение от сустава. Следуя предположению, сделанному выше, что маркер сустава (маркер 3) размещается на плече, расстояние между маркером сустава и маркером на предплечье (маркер 1) будет меняться в зависимости от перемещения руки, что приводит к изменению угла, заложенного плечом и предплечьем, тогда как расстояние между маркером на плече (маркер 2) и маркером у сустава вообще не изменяется, так как скелет негибкий в этом направлении. Поэтому может использоваться следующий алгоритм для оценки положения маркера на конечностях по движению тела:
Местоположение сустава - здесь локтя - задается с помощью (см. также фиг.2):
Elbow=(1+x)(RMarker3-RMarker2).
Если маркер находится на предплечье, то местоположение соответственно задается с помощью:
Elbow=(1+x)(RMarker3-RMarker2),
где х - смещение, заданное как дробь расстояния между маркерами 2 и 3 или, в варианте 2, между маркерами 1 и 3. Приближенное значение для исправления х=о, где о действительное смещение, находится путем минимизации отклонения в расстоянии ожидаемого положения сустава и положением запястья, как наблюдается по записанному движению, с помощью следующего алгоритма:
х=argmin{0
где Lt=(1+x)(RMarker3-RMarker2).
Оценка х улучшается со временем, так как значения SUM затем сходятся к ожидаемым значениям, и в лучшем случае становится х=о.
Результат этого смещения маркера со временем можно увидеть на фиг.3. После примерно минуты смещение маркера сошлось к значению, которое находится в пределах точности измерения оценки истинного значения для смещения маркера. С помощью этого цикличного и многократного приближения произошло автоматическое обучение положению маркера. Таким образом, система дает пользователю свободу размещать маркеры на его конечностях с большей степенью свободы и все же получать осмысленное поведение системы.
Реферат
Изобретение относится к системе управления здоровьем, содержащей средство обнаружения перемещения тела или конечности для обнаружения перемещений и положения тела или конечностей пользователей в трехмерном (3D) пространстве, средство анализа перемещения для анализа данных измерения, выполненного с помощью средства обнаружения перемещения тела или конечности, где средство обнаружения перемещения тела или конечности содержит по меньшей мере три датчика или маркера для отслеживания перемещения тела или конечности пользователя в трехмерном пространстве путем измерения угла, заложенного двумя частями тела пользователя, которые соединены друг с другом с помощью сустава, являющегося вершиной угла, который нужно измерить, у которого предусматривается один из датчиков или маркеров. Для определения смещения изменение расстояния между двумя соседними датчиками или маркерами указывает на смещение датчика у сустава, расположенного на расстоянии от вершины угла. Технический результат заключается в возможности свободного размещения маркеров на конечности с большой степенью свободы и получении достоверных данных от системы посредством обработки сигналов, поступающих от маркеров. 2 н. и 7 з.п. ф-лы, 3 ил.
Формула
средство обнаружения перемещения тела или конечности для обнаружения перемещений и положения тела или конечностей пользователей в трехмерном пространстве,
средство анализа перемещения для анализа данных измерения, выполненного с помощью средства обнаружения перемещения тела или конечности;
где средство обнаружения перемещения тела или конечности содержит по меньшей мере три датчика или маркера для отслеживания перемещения тела или конечности пользователя в трехмерном пространстве путем измерения угла, заложенного двумя частями тела пользователя, которые соединены друг с другом с помощью сустава, являющегося вершиной измеряемого угла, у которого предусмотрен один из датчиков или маркеров, отличающаяся тем, что изменение расстояния между двумя соседними датчиками или маркерами указывает на смещение датчика у сустава, расположенного на расстоянии от вершины, где изменение расстояния соответствует перемещению тела или конечности.
размещают по меньшей мере три маркера на конечности пользователя, которую нужно анализировать, для отслеживания перемещения тела или конечности пользователя так, что они образуют угол, заложенный двумя частями тела пользователя, которые соединены друг с другом с помощью сустава, являющегося вершиной измеряемого угла, у которого предусматривается один из датчиков или маркеров;
сравнивают положения маркеров относительно друг друга, где изменение расстояния между двумя соседними маркерами указывает на смещение маркера у сустава конечности, расположенного на расстоянии от вершины.
вычисляют движение между соседними датчиками для определения, размещается ли маркер у сустава на верхней или нижней конечности;
формируют первое значение смещения, предполагающее, что смещение между суставом и маркером равно нулю;
записывают перемещение пользователя и корректируют предположение о смещении маркера или датчика с помощью анализа движения.
минимизируют отклонение в расстоянии маркеров до ожидаемого положения сустава, как наблюдается по записанному движению.
формируют видимый и/или аддитивный стимулирующий сигнал, когда упомянутые данные смещения находятся вне целевого диапазона смещения, для того, чтобы заставить пользователя отрегулировать расположение датчика сустава путем перемещения датчика по направлению к вершине угла, заложенного между конечностями пользователя.
Комментарии