Устройство, способствующее реабилитации - RU2427361C2
Код документа: RU2427361C2
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройству для поддержки реабилитации, которое обнаруживает биосигнал от поверхности тела физически недееспособного живого организма, когда живой организм находится в движении, и поддерживает реабилитацию для восстановления физической дееспособности живого организма.
УРОВЕНЬ ТЕХНИКИ
В существующих учреждениях, например медицинских учреждениях и санаториях, реабилитацию для восстановления физически ослабленного человека осуществляют лечебной физкультурой для восстановления двигательной активности подвижного органа (например, кисти руки, руки, плеча, талии, колена, голеностопного сустава и т.п.) человека (человеческого тела).
Медицинская реабилитация данного типа осуществляется приложением дополнительной нагрузки или приложением внешнего усилия к мышцам около подвижного органа для сгибания или разгибания сустава подвижного органа, чтобы восстановить двигательную активность подвижного органа, которая понизилась вследствие воздействия непосредственно или косвенно действующих факторов, например, травмы или болезни.
Существуют различные способы приложения нагрузки или внешнего усилия, например простой способ, использующий груз или эластичную ленту, и механический способ, использующий специализированный нагрузочный механизм или прибор. В любом случае реабилитацию осуществляют по инструкциям врача или физиотерапевта.
Патентный документ 1 содержит описание устройства для реабилитации, которое осуществляет реабилитацию (или трудотерапию) посредством лечебной физкультуры. Устройство для реабилитации содержит консоль, продолжающуюся из базового элемента, и зажимной элемент, расположенный на переднем конце консоли. Используя устройство для реабилитации, человек, который проходит реабилитацию, может выборочно выполнять одно из нескольких упражнений в соответствии с состоянием восстановления сустава или мышечной силой человека, при этом упражнения содержат обязательное упражнение, в ходе которого конечность человека принудительно движется под внешним усилием, автоматическое упражнение, в ходе которого конечность человека активно движется, например совершает изотоническое движение, равномерное движение, и упражнение с сопротивлением.
Консоль является многоосевым передаточным рычагом, содержащим, по меньшей мере, два приводных вала. Консоль перемещает зажимной элемент в произвольное положение в диапазоне подвижности и изменяет позицию зажимного элемента. Консоль перемещается вместе с направляющей. Зажимной элемент закрепляют на конечности человека, который проходит реабилитацию. Датчик угла поворота и датчик скорости расположены на каждом из приводных валов.
Как поясняется в патентном документе 1, устройство для реабилитации выполнено с возможностью сбора нагрузочной информации, содержащей информацию о миоэлектрических сигналах, создаваемых основными мышцами конечности, информацию о положении и позиции консоли, обнаруженное значение датчика вращательного момента, закрепленного на приводном валу, и т.п., чтобы измерять нагрузку, которая активно создается конечностью человека, проходящего реабилитацию.
Собираемую информацию о нагрузке используют для выполнения автоматического ассистирования. Когда человек сам намеренно двигает конечностью во время автоматического ассистирования, к конечности прилагается сила, превышающая силу человека, благодаря вспомогательному действию консоли, исполняемому устройством для реабилитации на основе информации о нагрузке, собранной в это время.
Патентный документ 2 содержит описание портативного устройства для измерения электромиограммы и физического движения, которое выполнено с возможностью количественного анализа степени восстановления человека путем реабилитации. Данное измерительное устройство содержит миоэлектрический датчик и датчик физического движения. Миоэлектрический датчик обнаруживает сигнал миоэлектрического потенциала в качестве биосигнала. В патентном документе 2 в качестве датчика физического движения применен датчик ускорения. Упомянутые датчики расположены в симметричных положениях на каждой из правой стороны и левой стороны конечностей человека, соответственно, и датчики, расположенные с одной стороны, охватывают измеряемый орган человека, тогда как датчики, расположенные с другой стороны, охватывают здоровый орган человека.
Измерительное устройство, предложенное в патентном документе 2, передает выходные сигналы обнаружения от соответствующих датчиков во внешний персональный компьютер через радиопередающий блок измерительного устройства. Данные измерений подвижного состояния человека, собранные от датчиков, преобразуются в числовые данные и отображаются на компьютерном дисплее. При просмотре числовых данных на дисплее врач или физиотерапевт количественно анализирует влияние реабилитации на человека.
Патентный документ 3 содержит описание вспомогательного устройства с двигательным приводом, которое прикрепляется к коленному суставу человека и помогает человеку, который поднимается пешком по лестнице. Вспомогательное устройство с двигательным приводом содержит исполнительный механизм, датчик угла поворота, датчик давления и миоэлектрический датчик, который обнаруживает миоэлектрический потенциал в качестве биосигнала. Датчик угла поворота обнаруживает угол поворота коленного сустава. Миоэлектрический датчик определяет степень напряжения мышц. Датчик давления обнаруживает нагрузку на ногу или вес. Вспомогательное устройство с двигательным приводом определяет, является ли движение человека действием, связанным с пешим движением по лестнице, на основании обнаруженных сигналов от упомянутых датчиков и управляет приведением в движение исполнительного механизма с использованием обнаруженных сигналов от упомянутых датчиков в качестве запускающего сигнала.
Патентный документ 1: Японская выложенная патентная публикация № 10-258100
Патентный документ 2: Японская выложенная патентная публикация № 2005-278706
Патентный документ 3: Японская выложенная патентная публикация № 7-163607
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ЗАДАЧИ, КОТОРЫЕ СЛЕДУЕТ РЕШИТЬ В ИЗОБРЕТЕНИИ
Если мышечная сила или диапазон подвижности подвижного органа человека отклоняется от состояния, когда человек был здоров, медицинская реабилитация удовлетворительно выполняет задачу восстановления мышечной силы или диапазона подвижности подвижного органа до первоначального состояния. Например, выполняется разгибание мышц или выполняются упражнения на многократное повторение движущего действия для усиления мышц.
Однако, если человек физически недееспособен (например, человек теряет физическую дееспособность, или подвижный орган человека парализован) вследствие повреждения головного мозга или позвоночника, то для восстановления человека требуется много времени и терпения, и не очевидно, восстанавливает ли человек утерянную физическую дееспособность в ходе реабилитации. Поэтому, во многих случаях, человек бросает восстановление или выполняет вспомогательные занятия, чтобы работа недееспособного органа выполнялась другими органами тела.
В подобных обстоятельствах, если проходит длительное время после того, как возникает физическая недееспособность, мышечная сила и диапазон подвижности могут значительно сократиться, и человек может забыть действие и ощущение в здоровом состоянии. В частности, во время ежедневного действия, которое выполняется бессознательным движением мышц, человек, который лишен физической дееспособности, может забыть порядок движения мышцами.
Программа реабилитационных упражнений тщательно определяется путем многократного повторения диалога между инструктором (например, врачом или физиотерапевтом) и человеком, который проходит реабилитацию, и путем проверки, является ли программа упражнений подходящей для человека. Поэтому программа упражнений изменяется по содержанию в зависимости от индивидуальных отличий каждого человека, а также от уровня поражения или степени восстановления.
Когда определяют содержание программы упражнений, инструктор по реабилитации иногда подает нагрузку непосредственно на руку или ногу человека, чтобы исследовать реакцию подвижного органа человека или спросить человека об ощущении подвижного органа. Однако человек обычно двигает мышцами подвижного органа бессознательно, и ощущения каждого человека индивидуально различны. Человеку трудно выразить ощущение в количественном виде. Если между инструктором и человеком отсутствует хорошее общение, то предложить подходящую инструкцию по реабилитации невозможно, что может воспрепятствовать восстановлению физической дееспособности.
Согласно аспекту изобретения настоящая заявка предлагает устройство для поддержки реабилитации, которое способно осуществлять корреляцию между физической величиной около сустава, который является объектом измерения, и биосигналом произвольной мышцы около сустава и выводить данные о корреляции между физической величиной и биосигналом в количественном виде.
СРЕДСТВА ДЛЯ РЕШЕНИЯ ЗАДАЧИ
В варианте осуществления изобретения, который полностью или частично решает, по меньшей мере, одну из вышеупомянутых задач, настоящая заявка предлагает устройство для поддержки реабилитации, содержащее: первую раму, расположенную вдоль первой скелетной части, продолжающейся из сустава, являющегося объектом измерения среди подвижных органов живого организма; вторую раму, расположенную вдоль второй скелетной части, продолжающейся из сустава в направлении, отличающемся от направления первой скелетной части; датчик угла поворота, выполненный с возможностью расположения его центра поворота коаксиально с осью поворота сустава, при этом датчик угла поворота обнаруживает положение по углу поворота между первой рамой и второй рамой; датчик биосигнала на стороне сгибания, выполненный с возможностью контакта с поверхностью тела, соответствующей мышце-сгибателю, которая сгибает сустав, соединяющий первую скелетную часть и вторую скелетную часть, причем датчик биосигнала на стороне сгибания обнаруживает биосигнал мышцы-сгибателя; датчик биосигнала на стороне разгибания, выполненный с возможностью контакта с поверхностью тела, соответствующей мышце-разгибателю, которая разгибает сустав, соединяющий первую скелетную часть и вторую скелетную часть, причем датчик биосигнала на стороне разгибания обнаруживает биосигнал мышцы-разгибателя; блок калибровки, выполненный с возможностью определения величины коррекции на стороне сгибания для калибровки выходного значения датчика биосигнала на стороне сгибания и величины коррекции на стороне разгибания для калибровки выходного значения датчика биосигнала на стороне разгибания по отдельности; и блок памяти, выполненный с возможностью сохранения отдельных величин коррекции биосигналов, разных для отдельных лиц, величины коррекции на стороне сгибания и величины коррекции на стороне разгибания.
В варианте осуществления изобретения, который полностью или частично решает, по меньшей мере, одну из вышеупомянутых задач, настоящая заявка предлагает устройство для поддержки реабилитации, в котором датчик биосигнала на стороне сгибания измеряет в качестве биосигнала мышцы-сгибателя, по меньшей мере, какой-то один из передаваемого по нервам сигнала на стороне сгибания, соответствующего мышце-сгибателю, посылаемого из головного мозга на сокращение мышцы-сгибателя, и сигнала миоэлектрического потенциала на стороне сгибания, возникающего, когда выполняется сокращение мышцы-сгибателя, и датчик биосигнала на стороне разгибания измеряет, в качестве биосигнала мышцы-разгибателя, по меньшей мере, какой-то один из передаваемого по нервам сигнала на стороне разгибания, соответствующего мышце-разгибателю, выдаваемого головным мозгом на сокращение мышцы-разгибателя, и сигнала миоэлектрического потенциала на стороне разгибания, возникающего, когда выполняется сокращение мышцы-разгибателя.
В варианте осуществления изобретения, который полностью или частично решает, по меньшей мере, одну из вышеупомянутых задач, настоящая заявка предлагает устройство для поддержки реабилитации, дополнительно содержащее блок индикации, выполненный с возможностью предоставления визуальной, звуковой или тактильной информации, которая распознается, по меньшей мере, каким-то одним из чувств зрения, слуха и тактильного восприятия, и при этом блок индикации выполнен с возможностью выдачи информации на основании выходного сигнала мышцы-сгибателя, полученного из выходного значения датчика биосигнала на стороне сгибания, которое скорректировано на основании величины коррекции на стороне сгибания, выходного сигнала мышцы-разгибателя, полученного из выходного значения датчика биосигнала на стороне разгибания, которое скорректировано на основании величины коррекции на стороне разгибания, и положения по углу поворота, обнаруженного датчиком угла поворота.
В варианте осуществления изобретения, который полностью или частично решает, по меньшей мере, одну из вышеупомянутых задач, настоящая заявка предлагает устройство для поддержки реабилитации, в котором блок калибровки выполнен с возможностью определения величины коррекции на стороне сгибания и величины коррекции на стороне разгибания на основании величины изменения угла поворота, обнаруживаемой датчиком угла поворота, времени поворота первой рамы ко второй раме на величину изменения угла поворота и импульса, определяемого из выходного значения датчика биосигнала на стороне сгибания и выходного значения датчика биосигнала на стороне разгибания, пока первая рама не повернется ко второй раме на величину изменения угла поворота.
В варианте осуществления изобретения, который полностью или частично решает, по меньшей мере, одну из вышеупомянутых задач, настоящая заявка предлагает устройство для поддержки реабилитации, дополнительно содержащее: приводной блок, расположенный коаксиально с центром поворота датчика угла поворота, при этом приводной блок поворачивает первую раму ко второй раме; датчик вращательного момента, расположенный коаксиально с центром поворота датчика угла поворота, причем датчик вращательного момента обнаруживает вращательный момент, с которым осуществляется поворот первой рамы ко второй раме; и блок управления, выполненный с возможностью приведения в действие приводного блока на основании информации, полученной из датчика биосигнала на стороне сгибания, датчика биосигнала на стороне разгибания, датчика угла поворота и датчика вращательного момента, и соответствующих величин коррекции, полученных из блока калибровки.
В варианте осуществления изобретения, который полностью или частично решает, по меньшей мере, одну из вышеупомянутых задач, настоящая заявка предлагает устройство для поддержки реабилитации, в котором, когда сустав не действует, блок управления побуждает приводной блок нагружать сустав предварительно заданным вращательным моментом, и при этом блок калибровки выполнен с возможностью определения величины коррекции на стороне сгибания и величины коррекции на стороне разгибания на основании соответствующих выходных значений датчика биосигнала на стороне сгибания, датчика биосигнала на стороне разгибания и датчика вращательного момента, когда мышца-сгибатель и мышца-разгибатель, соответственно, работают так, чтобы выдерживать нагрузку предварительно заданным вращательным моментом и, тем самым, сохранять позицию сустава.
В варианте осуществления изобретения, который полностью или частично решает, по меньшей мере, одну из вышеупомянутых задач, настоящая заявка предлагает устройство для поддержки реабилитации, дополнительно содержащее блок коррекции, выполненный с возможностью выдачи в блок управления выходного сигнала мышцы-сгибателя, полученного из выходного значения датчика биосигнала на стороне сгибания, скорректированного на основании величины коррекции на стороне сгибания, и выходного сигнала мышцы-разгибателя, полученного из выходного значения датчика биосигнала на стороне разгибания, скорректированного на основании величины коррекции на стороне разгибания, при этом блок управления приводит в действие приводной блок на основании выходного сигнала мышцы-сгибателя и выходного сигнала мышцы-разгибателя из блока коррекции, и положения по углу поворота из датчика угла поворота.
В варианте осуществления изобретения, который полностью или частично решает, по меньшей мере, одну из вышеупомянутых задач, настоящая заявка предлагает устройство для поддержки реабилитации, дополнительно содержащее: приспособление, выполненное с возможностью фиксации первой рамы на второй раме под произвольным углом поворота; первый тензодатчик, который прикреплен к первой раме и измеряет напряжение изгиба, приложенное к первой раме; и второй тензодатчик, который прикреплен ко второй раме и измеряет напряжение изгиба, приложенное ко второй раме.
В варианте осуществления изобретения, который полностью или частично решает, по меньшей мере, одну из вышеупомянутых задач, настоящая заявка предлагает устройство для поддержки реабилитации, в котором блок калибровки определяет, когда первая рама зафиксирована на второй раме под произвольным углом поворота приспособлением, и мышца-сгибатель и мышца-разгибатель работают так, чтобы повернуть первую раму ко второй раме, величину коррекции на стороне сгибания и величину коррекции на стороне разгибания на основании информации, получаемой из датчика биосигнала на стороне сгибания, датчика биосигнала на стороне разгибания, первого тензодатчика и второго тензодатчика.
В варианте осуществления изобретения, который полностью или частично решает, по меньшей мере, одну из вышеупомянутых задач, настоящая заявка предлагает устройство для поддержки реабилитации, в котором блок индикации содержит дисплейный блок, выполненный с возможностью отображения выходного сигнала мышцы-сгибателя, выходного сигнала мышцы-разгибателя и положения по углу поворота.
В варианте осуществления изобретения, который полностью или частично решает, по меньшей мере, одну из вышеупомянутых задач, настоящая заявка предлагает устройство для поддержки реабилитации, в котором блок индикации содержит блок моделирования, выполненный с возможностью обеспечения визуальной или тактильной информации, при этом блок моделирования содержит: первую моделирующую раму и вторую моделирующую раму, расположенные независимо от первой рамы и второй рамы, и конец первой моделирующей рамы соединен с возможностью поворота с концом второй моделирующей рамы с помощью соединительного элемента; датчик угла поворота моделируемого объекта, расположенный в соединительном элементе, для определения положения по углу поворота первой моделирующей рамы и второй моделирующей рамы; приводной блок моделируемого объекта, расположенный коаксиально с центром поворота датчика угла поворота моделируемого объекта, причем приводной блок моделируемого объекта поворачивает вторую моделирующую раму к первой моделирующей раме; и элемент управления моделируемым объектом, выполненный с возможностью побуждения приводного блока моделируемого объекта осуществлять поворот первой моделирующей рамы и второй моделирующей рамы посредством преобразования выходного сигнала мышцы-сгибателя, полученного из выходного значения датчика биосигнала на стороне сгибания, скорректированного на основании величины коррекции на стороне сгибания, выходного сигнала мышцы-разгибателя, полученного из выходного значения датчика биосигнала на стороне разгибания, скорректированного на основании величины коррекции на стороне разгибания, и положения по углу поворота датчика угла поворота в выходные сигналы на приводной блок моделируемого объекта.
В варианте осуществления изобретения, который полностью или частично решает, по меньшей мере, одну из вышеупомянутых задач, настоящая заявка предлагает устройство для поддержки реабилитации, дополнительно содержащее: приводной блок, расположенный коаксиально с центром поворота датчика угла поворота, при этом приводной блок поворачивает первую раму ко второй раме; датчик вращательного момента, расположенный коаксиально с центром поворота датчика угла поворота, причем датчик вращательного момента обнаруживает вращательный момент, с которым осуществляется поворот первой рамы ко второй раме; первый тензодатчик, который прикреплен к первой раме и измеряет напряжение изгиба, приложенное к первой раме; второй тензодатчик, который прикреплен ко второй раме и измеряет напряжение изгиба, приложенное ко второй раме; и блок управления, выполненный с возможностью приведения в действие приводного блока на основании выходного сигнала мышцы-сгибателя, выходного сигнала мышцы-разгибателя, положения по углу поворота датчика угла поворота, обнаруженного значения моментного датчика, обнаруженного значения первого тензодатчика и обнаруженного значения второго тензодатчика.
В варианте осуществления изобретения, который полностью или частично решает, по меньшей мере, одну из вышеупомянутых задач, настоящая заявка предлагает устройство для поддержки реабилитации, в котором блок управления выполнен с возможностью приведения в действие приводного блока на основании положения по углу поворота датчика угла поворота моделируемого объекта, и при этом элемент управления моделируемым объектом выполнен с возможностью приведения в действие приводного блока моделируемого объекта на основании выходного сигнала мышцы-сгибателя, выходного сигнала мышцы-разгибателя, положения по углу поворота датчика угла поворота, обнаруженного значения датчика вращательного момента, обнаруженного значения первого тензодатчика и обнаруженного значения второго тензодатчика.
ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
В устройстве для поддержки реабилитации в соответствии с одним вариантом осуществления изобретения относительное положение по углу поворота первой скелетной части и второй скелетной части, продолжающихся из сустава, являющегося объектом измерения, и биосигналы из мышцы-сгибателя и мышцы-разгибателя около сустава можно одновременно обнаруживать как абсолютные величины. Поэтому можно легко определить корреляцию между движением в суставе и биосигналами от мышц для движения в суставе.
Устройство для поддержки реабилитации в соответствии с одним вариантом осуществления изобретения одновременно обнаруживает движение в суставе и биосигналы мышцы-сгибателя и мышцы-разгибателя, которые являются мышцами-антагонистами около сустава, и содержит блок калибровки и блок памяти. Поэтому, даже если ошибка обнаружения биосигналов появляется каждый раз, когда устройство для поддержки реабилитации присоединяют к человеку, т.е. живому организму, то величину коррекции на стороне сгибания биосигнала на стороне сгибания для положения по углу поворота и величину коррекции на стороне разгибания биосигнала на стороне разгибания для положения по углу поворота можно легко выставить, и движение в суставе, являющемся объектом измерения, и соответствующие биосигналы произвольно сокращающейся мышцы можно выводить в количественном виде.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
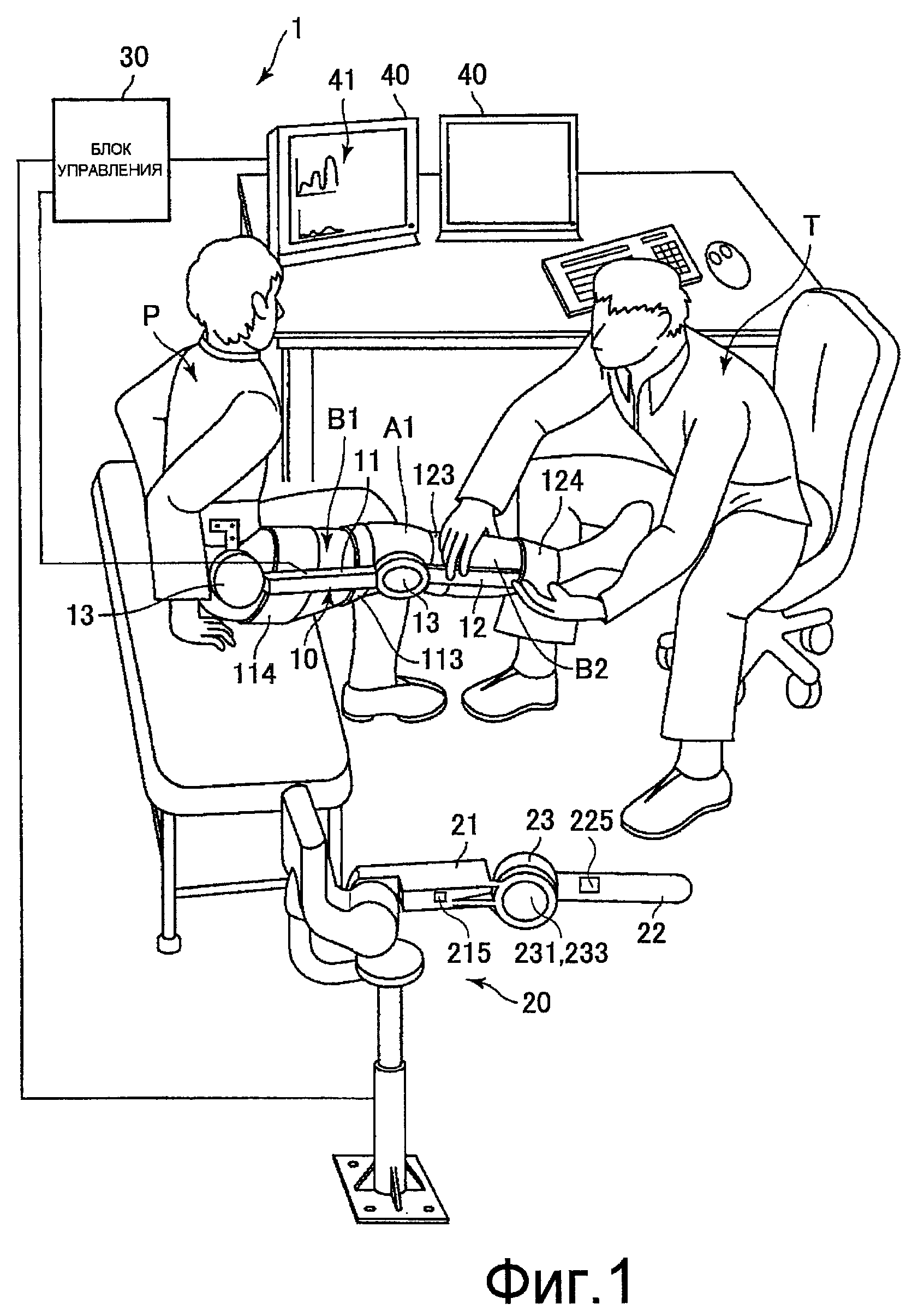
Фиг.1 - вид в перспективе обстановки, в которой применяется устройство для поддержки реабилитации в соответствии с первым вариантом осуществления изобретения.
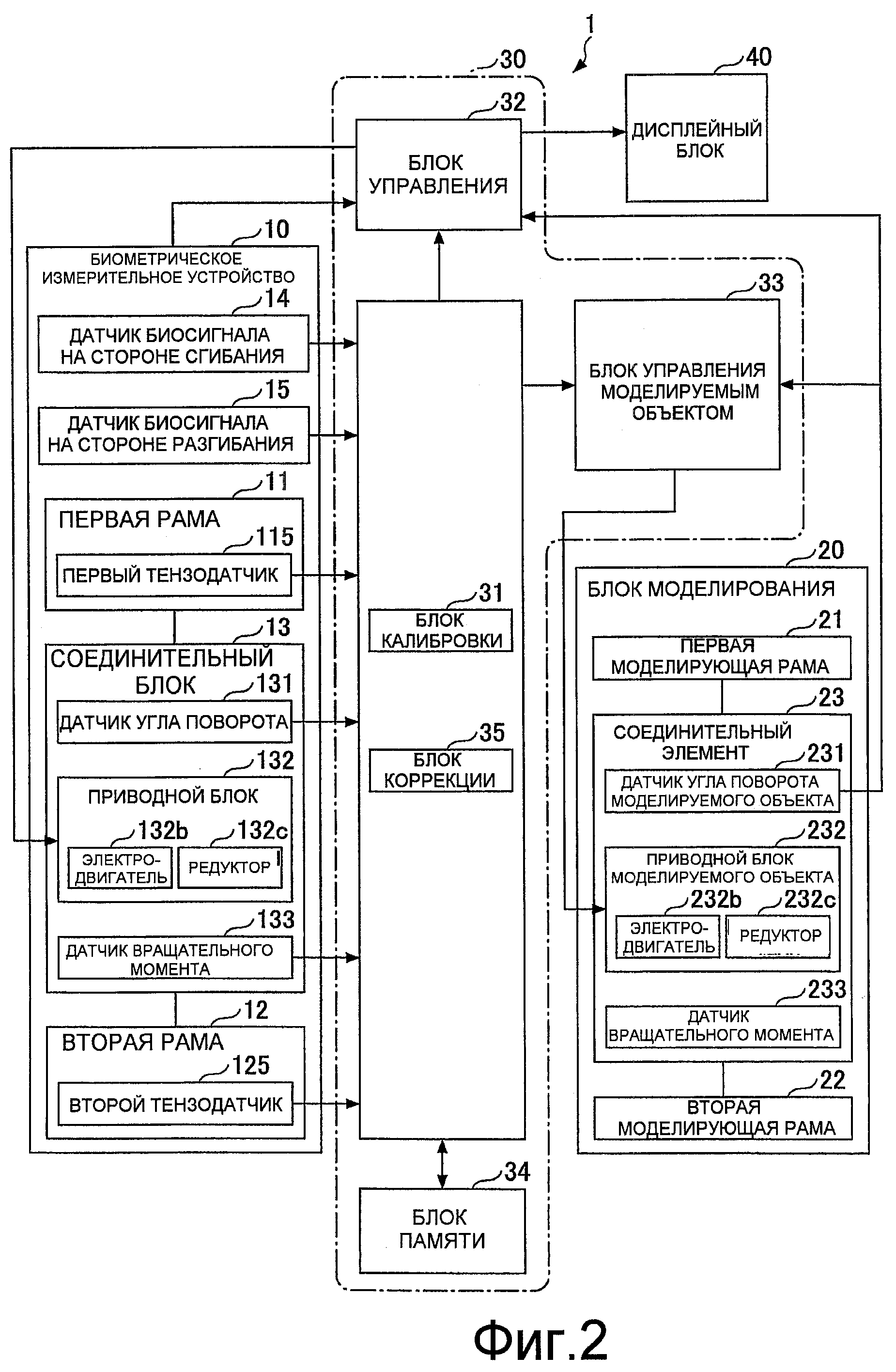
Фиг.2 - блок-схема, иллюстрирующая состав устройства для поддержки реабилитации, показанного на фиг.1.
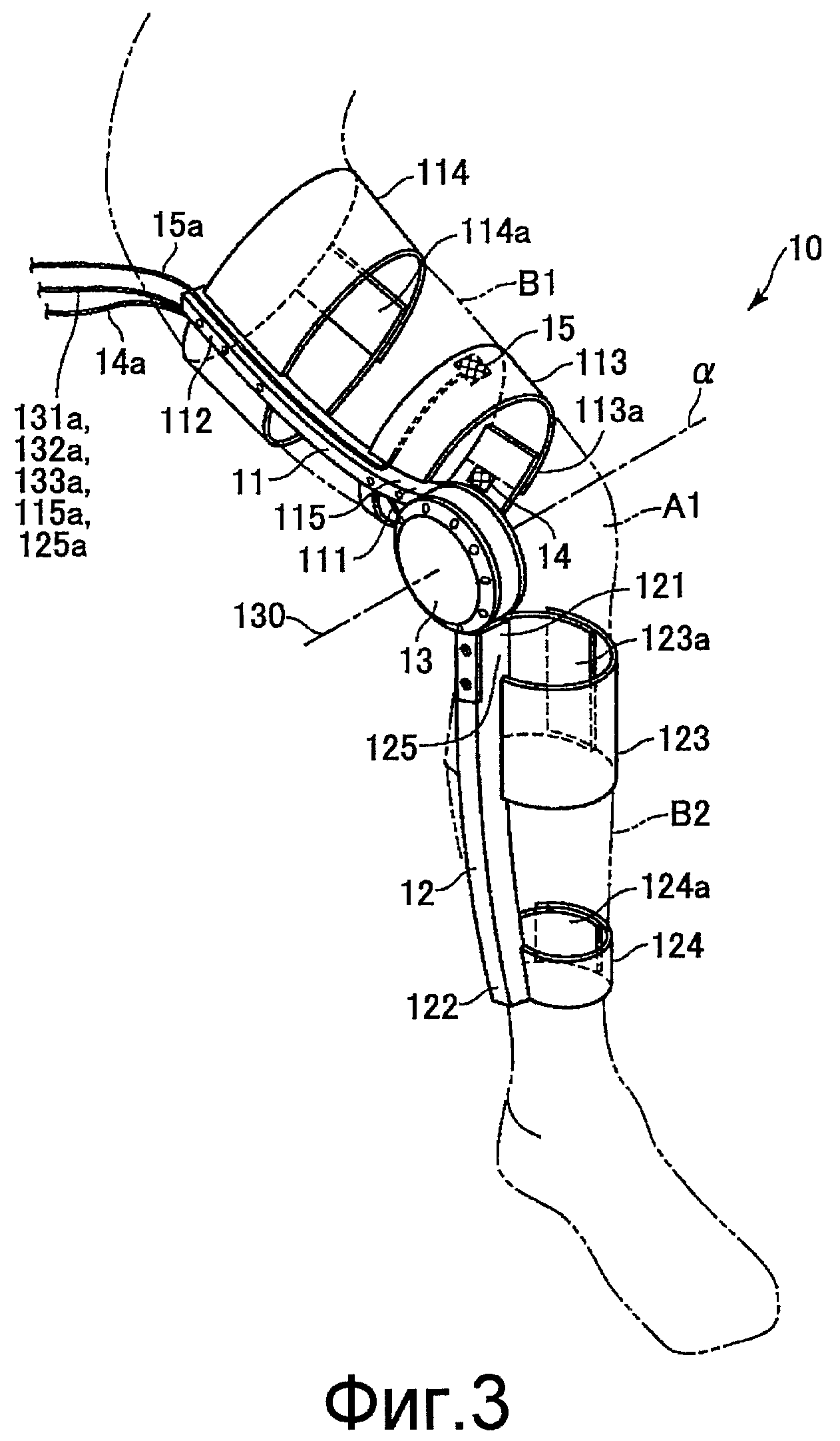
Фиг.3 - вид в перспективе биометрического измерительного устройства из состава устройства для поддержки реабилитации, показанного на фиг.2.
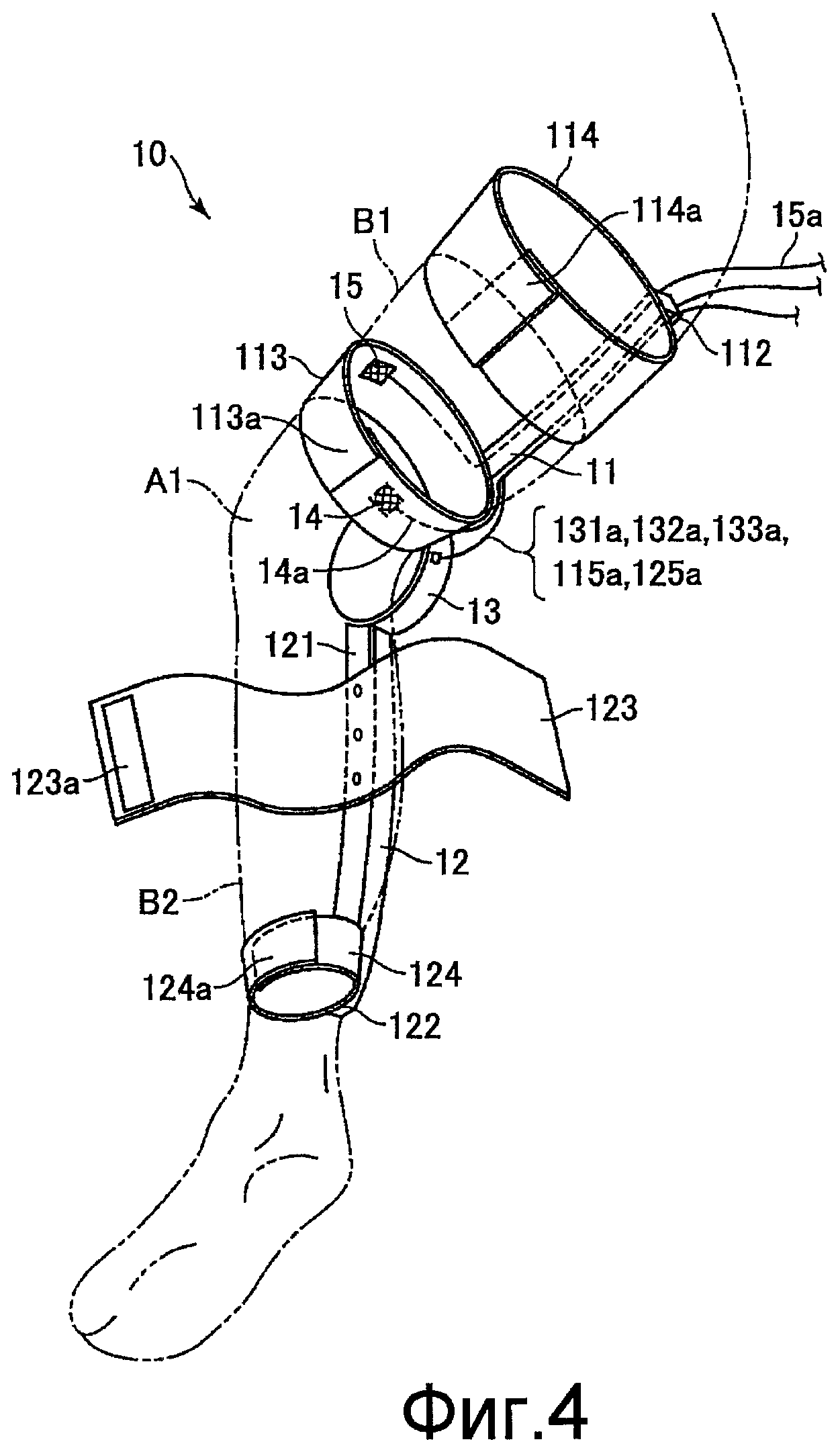
Фиг.4 - вид в перспективе биометрического измерительного устройства, показанного на фиг.3, при наблюдении с противоположной стороны.
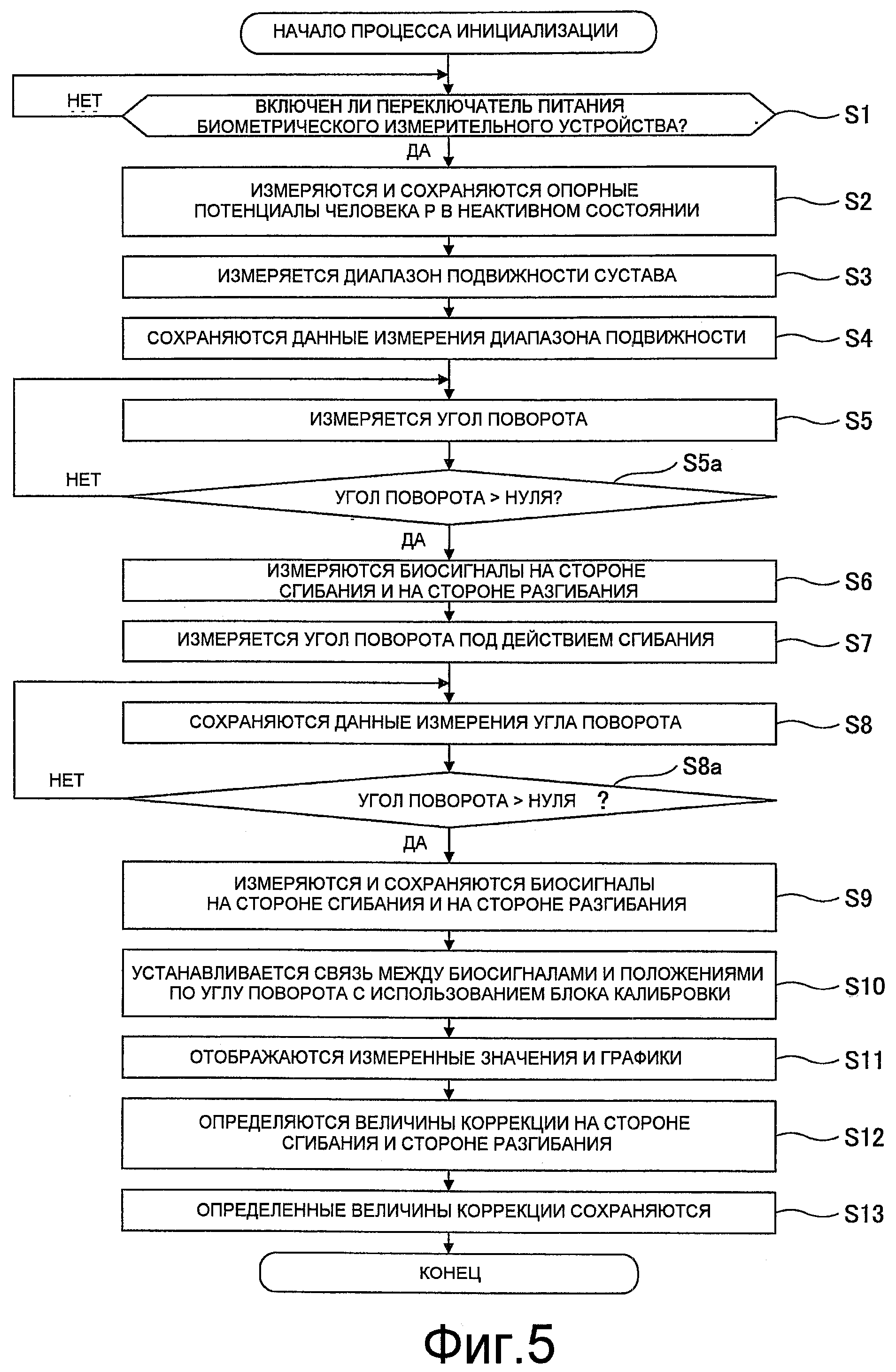
Фиг.5 - блок-схема последовательности операций, поясняющая процесс инициализации, выполняемый устройством для поддержки реабилитации, показанным на фиг.2.
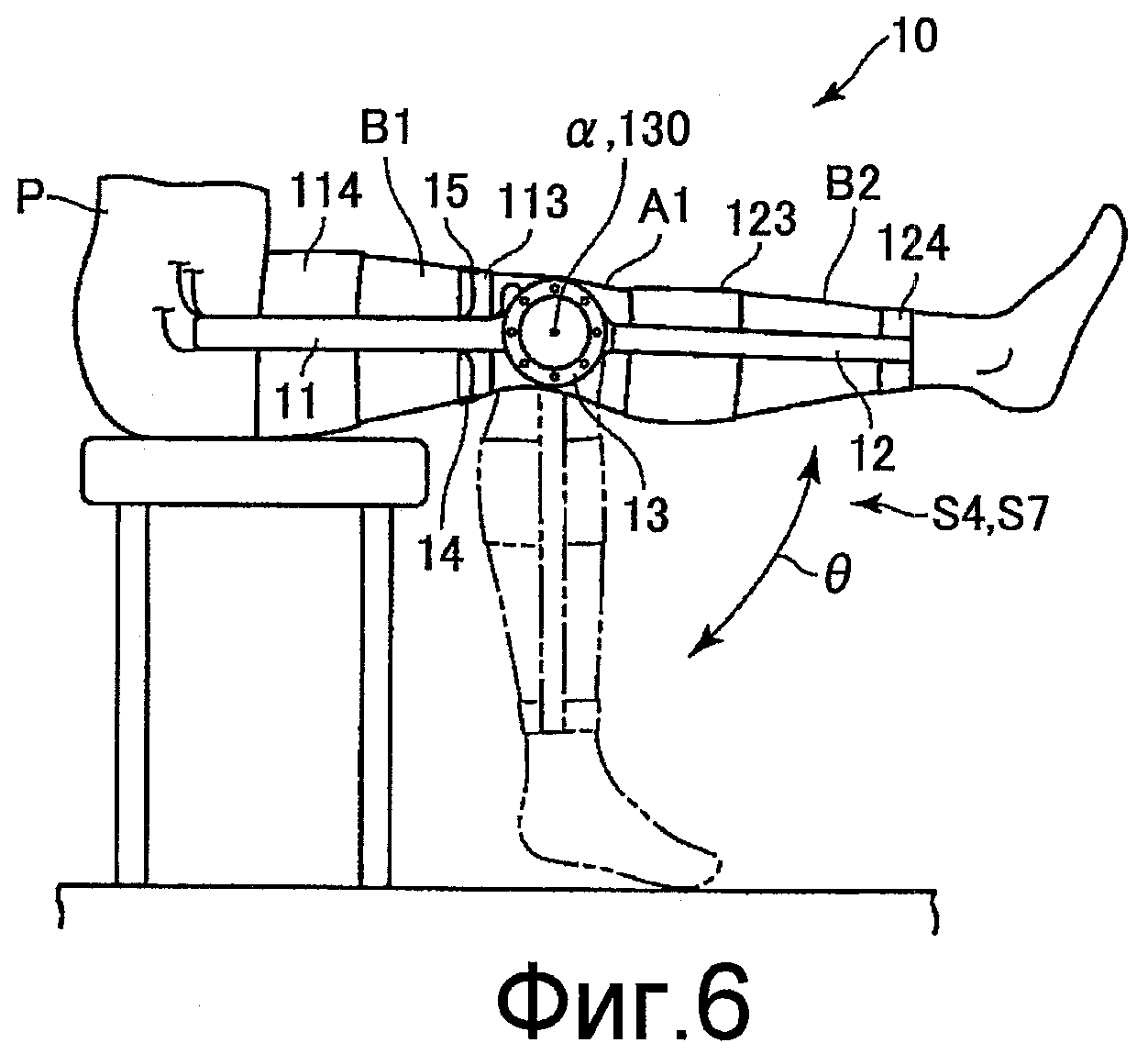
Фиг.6 - вид сбоку, иллюстрирующий состояние измерения динамического биосигнала с использованием биометрического измерительного устройства, показанного на фиг.3.
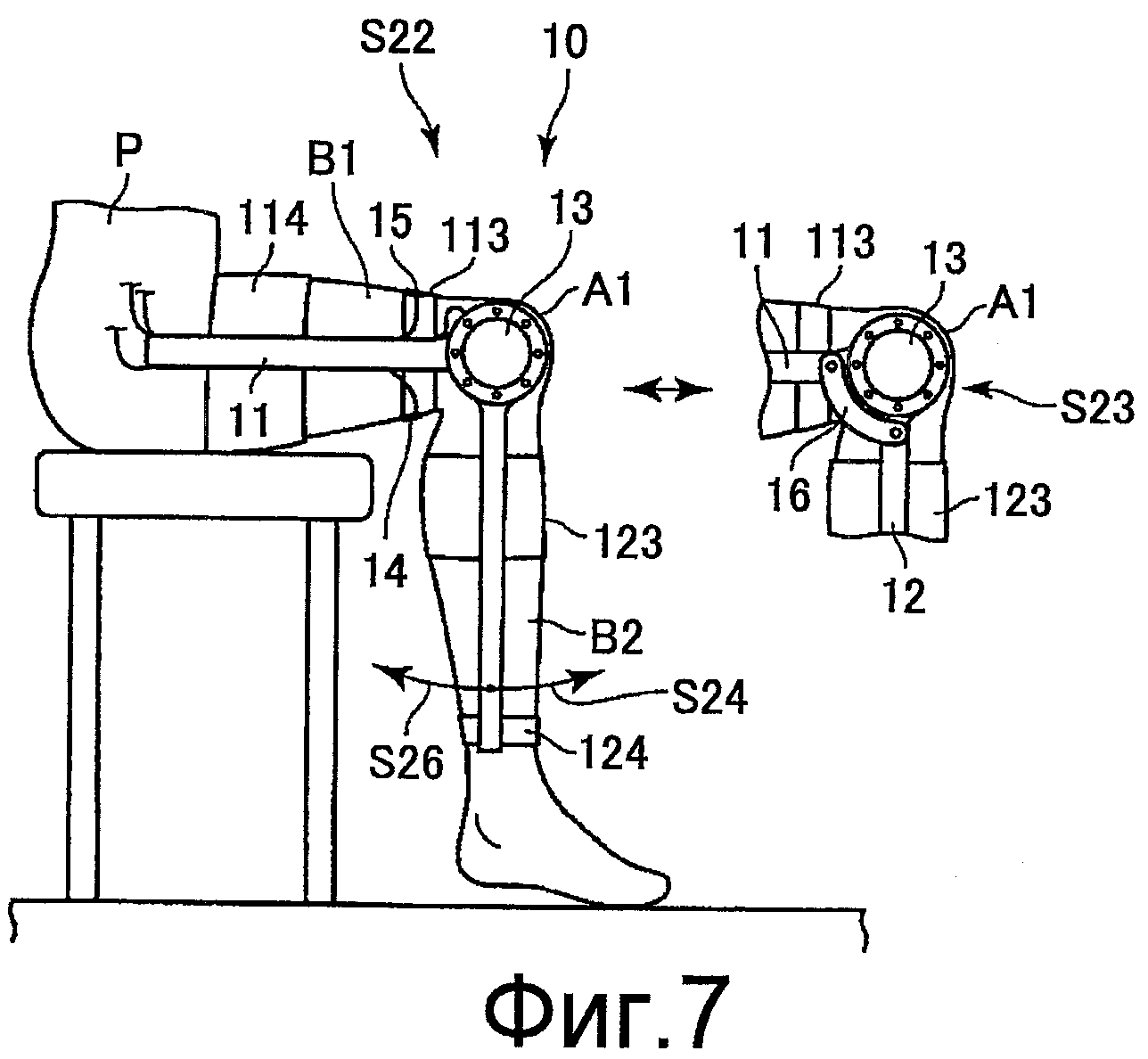
Фиг.7 - вид сбоку, иллюстрирующий состояние измерения статического биосигнала с использованием биометрического измерительного устройства, показанного на фиг.3.
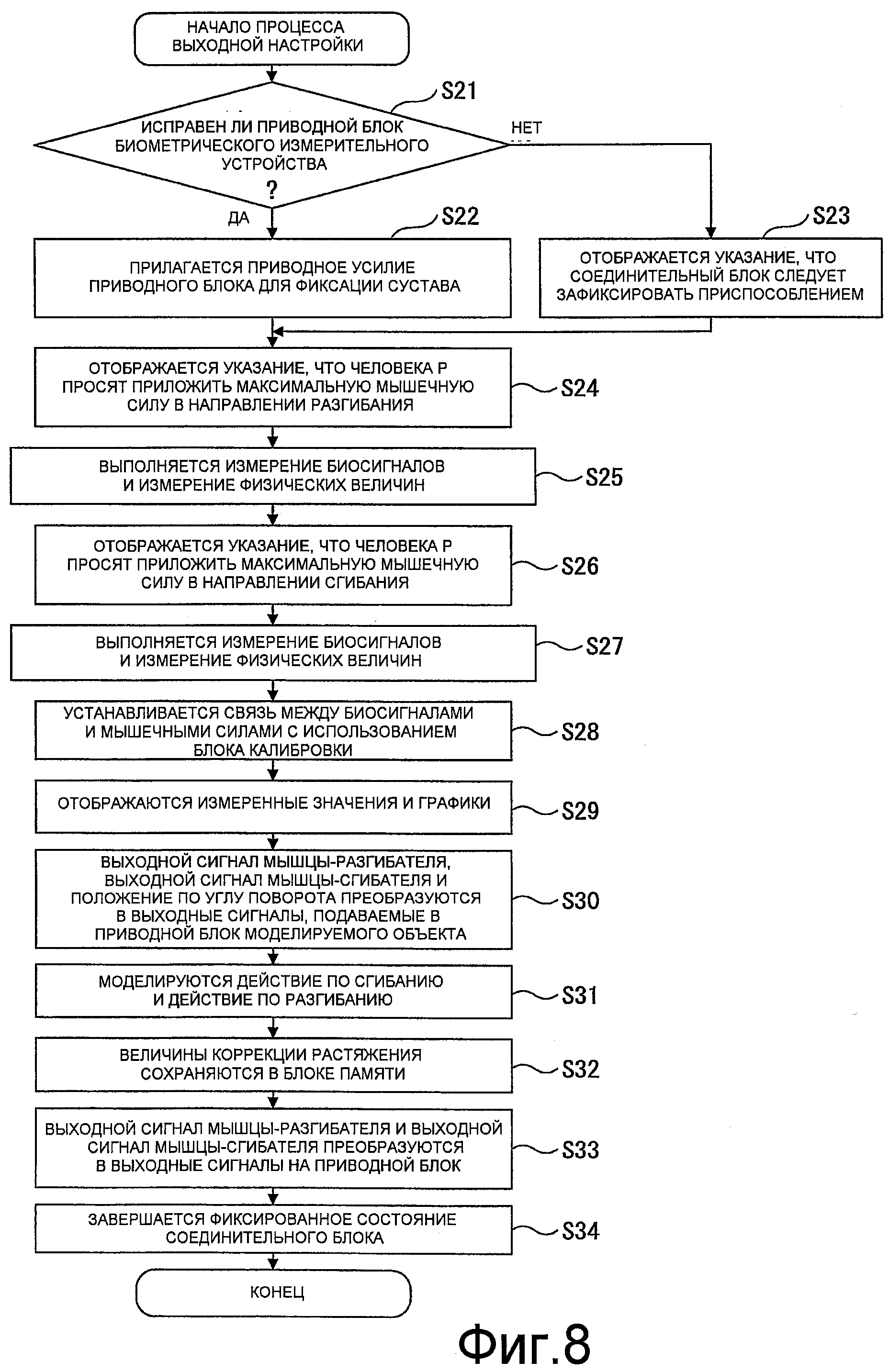
Фиг.8 - блок-схема последовательности операций, поясняющая процесс выходной настройки мышечной силы относительно биосигнала с использованием устройства для поддержки реабилитации, показанного на фиг.2.
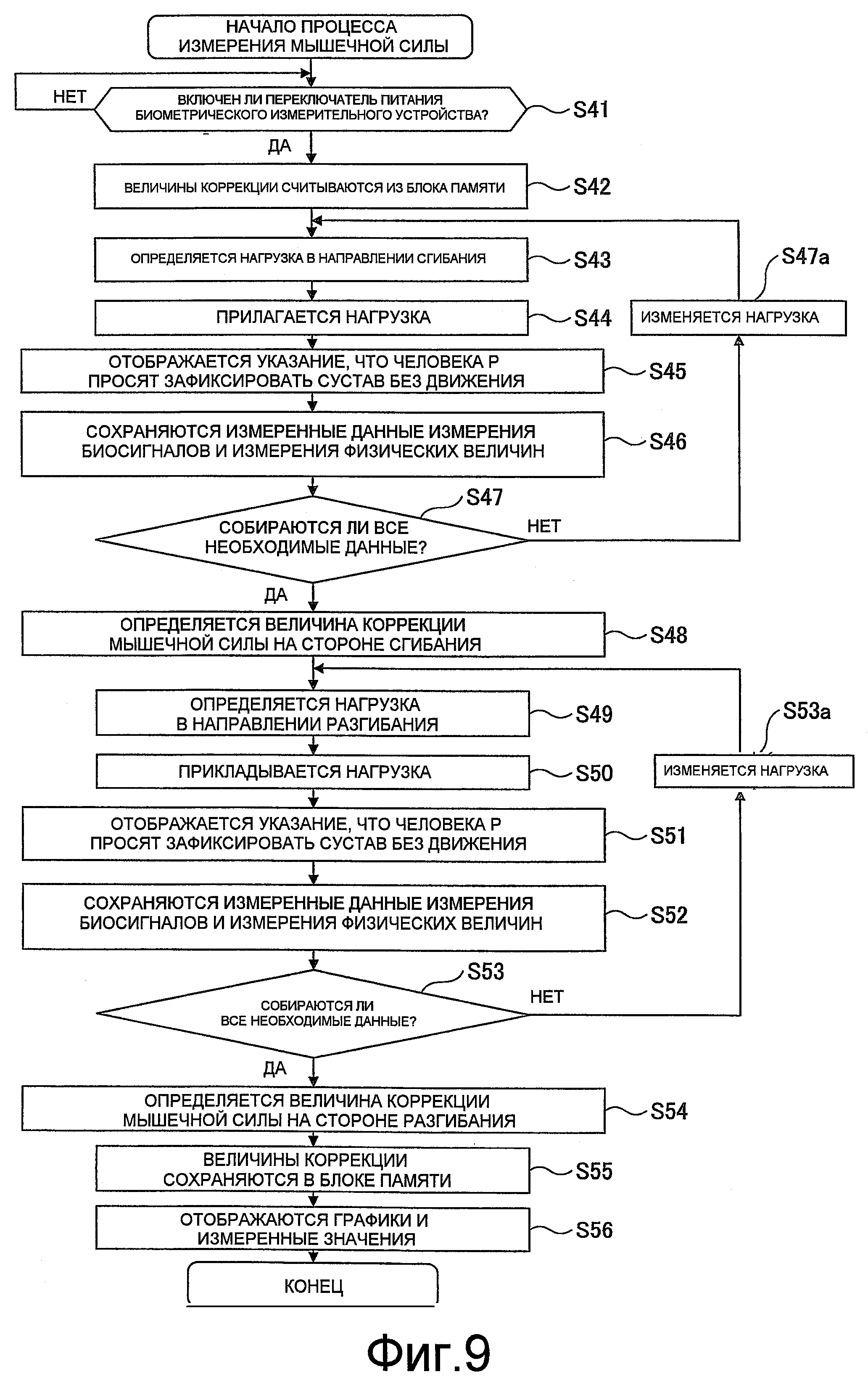
Фиг.9 - блок-схема последовательности операций, поясняющая измерительный процесс, который измеряет корреляцию биосигнала относительно мышечной силы с использованием устройства для поддержки реабилитации, показанного на фиг.2.
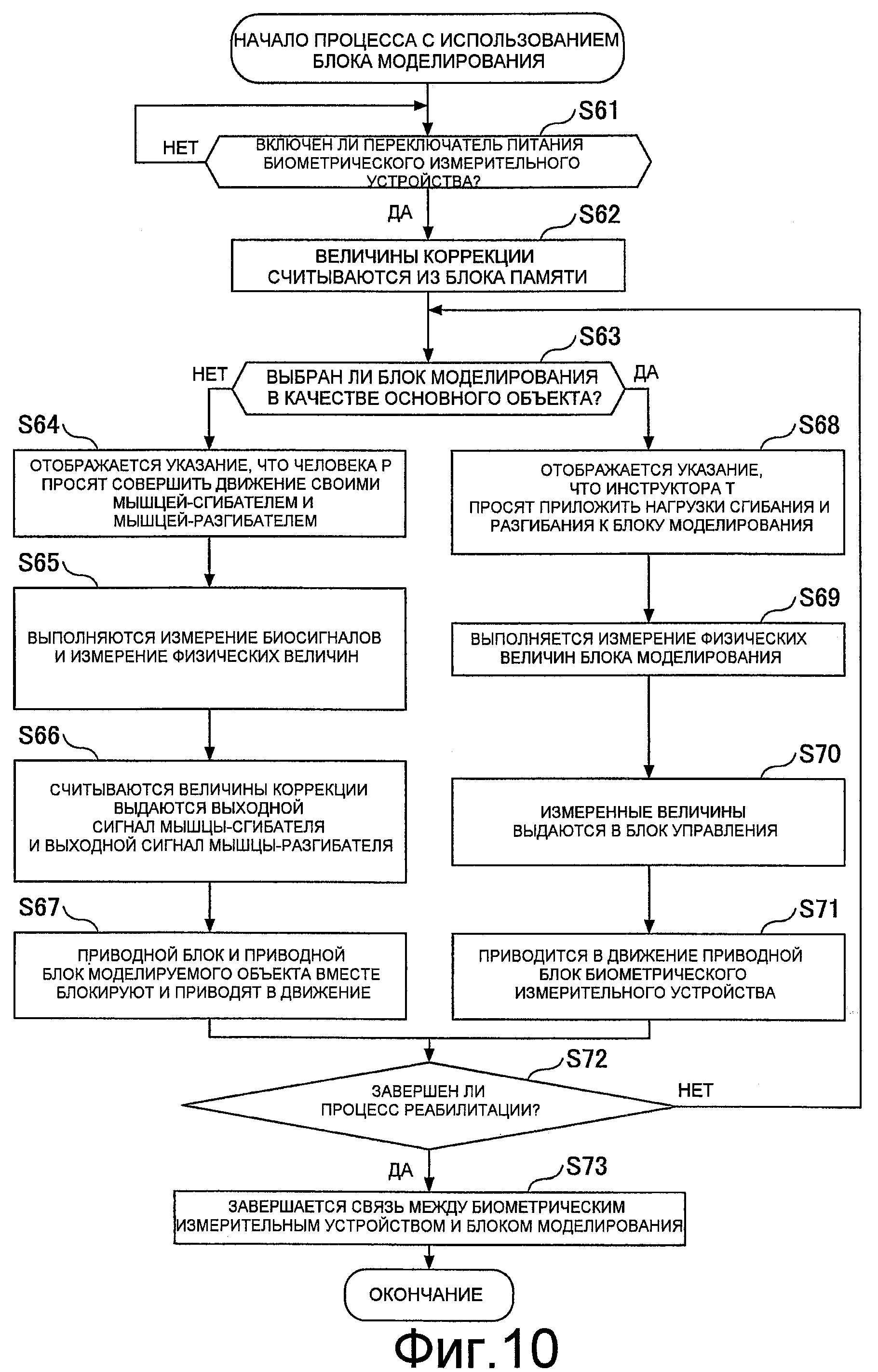
Фиг.10 - блок-схема последовательности операций, поясняющая процесс реабилитации, выполняемый устройством для поддержки реабилитации с использованием блока моделирования, показанного на фиг.2.
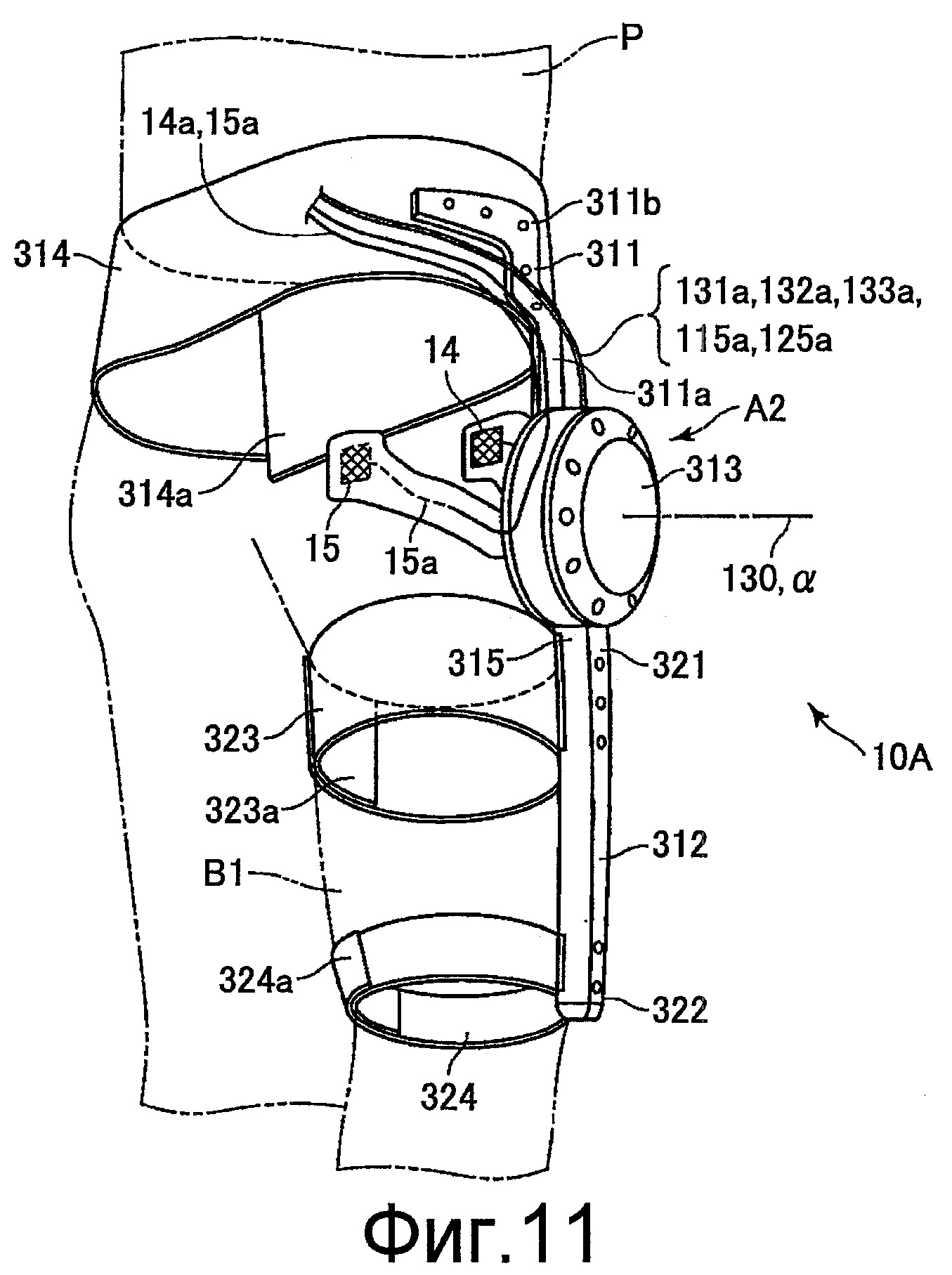
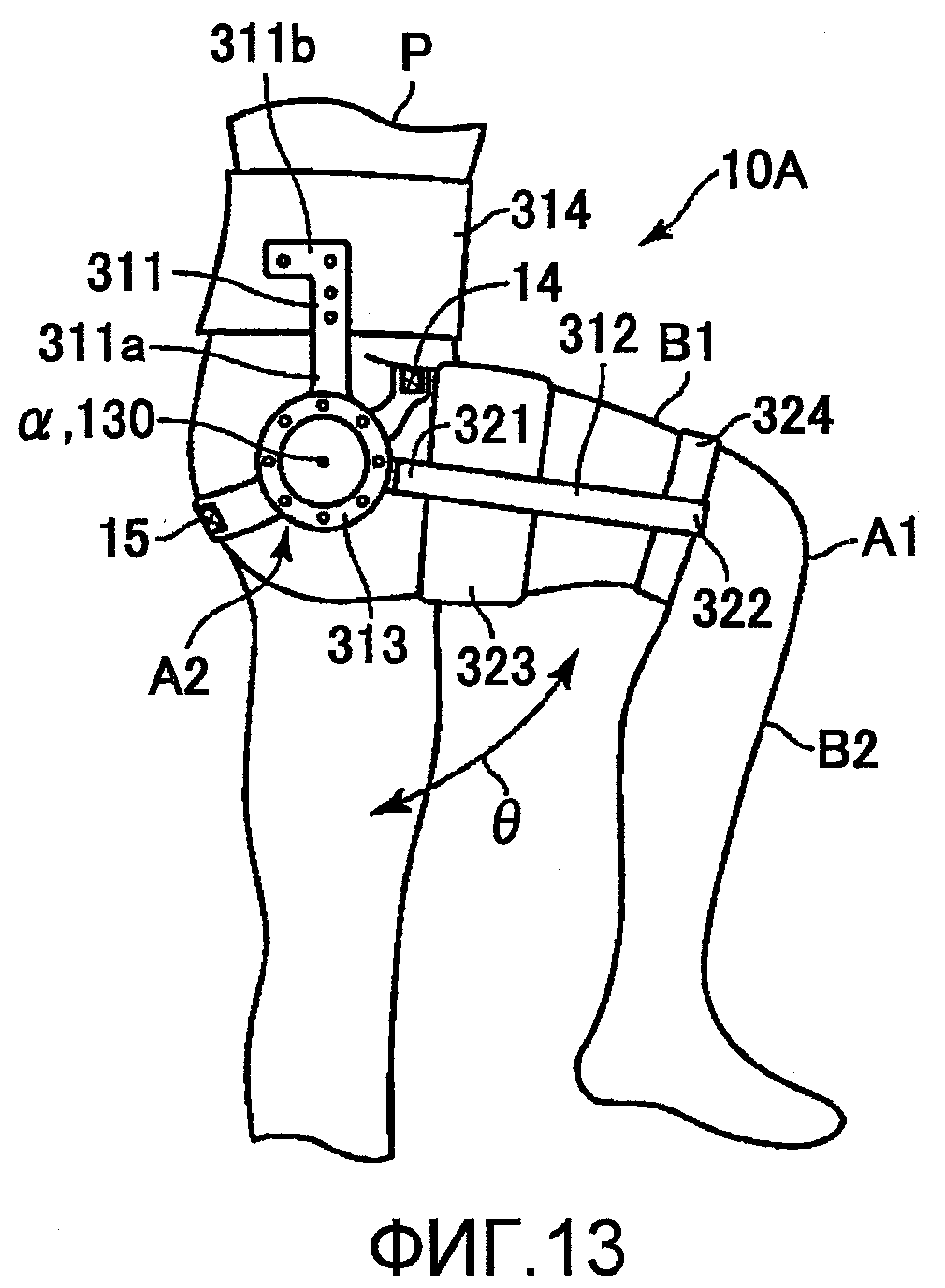
Фиг.11 - вид в перспективе биометрического измерительного устройства для тазобедренного сустава, применяемого в устройстве для поддержки реабилитации в соответствии со вторым вариантом осуществления изобретения.
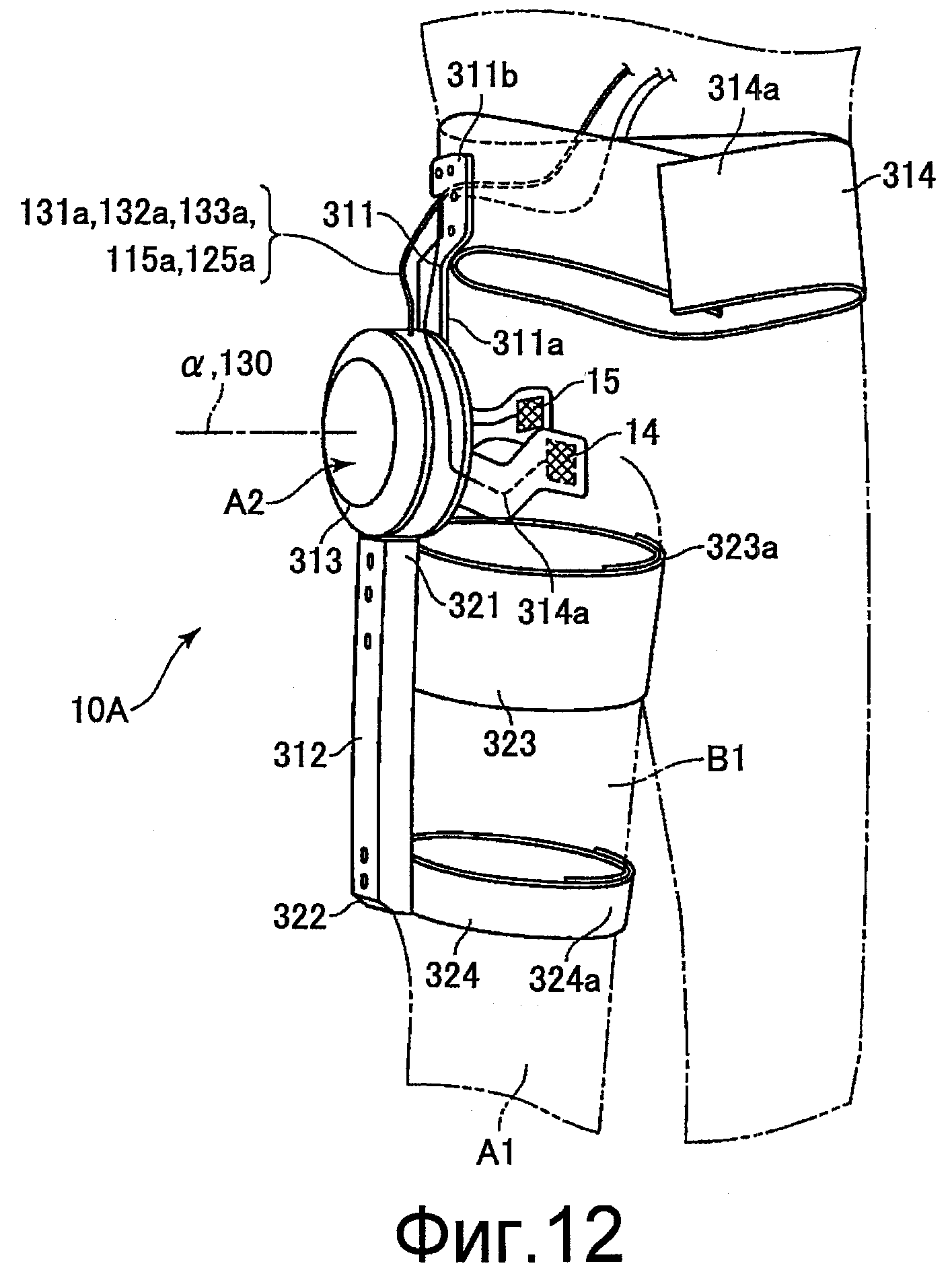
Фиг.12 - вид в перспективе биометрического измерительного устройства, показанного на фиг.11, при наблюдении с противоположной стороны.
Фиг.13 - вид сбоку, иллюстрирующий состояние измерения динамического биосигнала с использованием биометрического измерительного устройства, показанного на фиг.11.
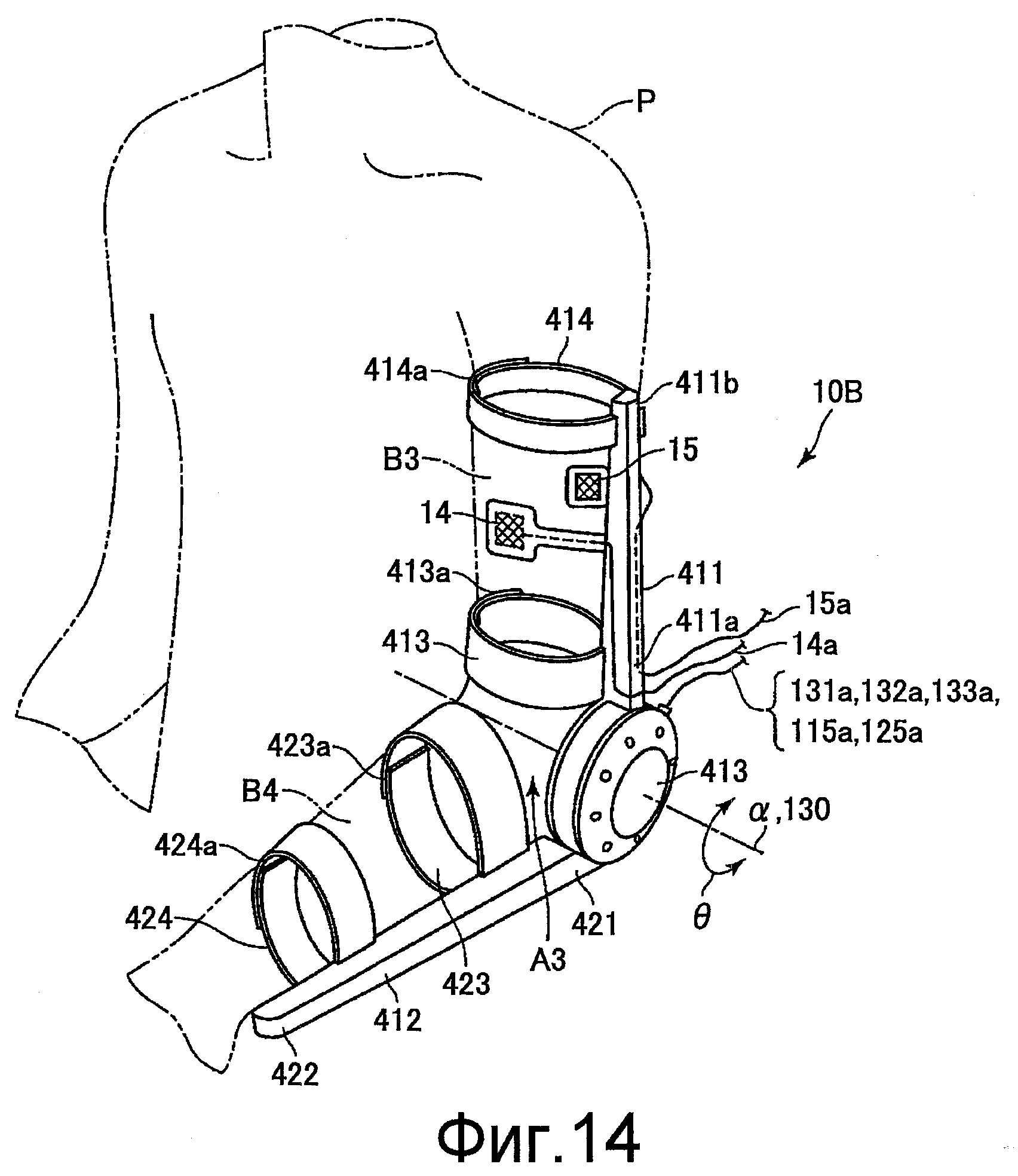
Фиг.14 - вид в перспективе биометрического измерительного устройства для локтевого сустава, применяемого в устройстве для поддержки реабилитации в соответствии с третьим вариантом осуществления изобретения.
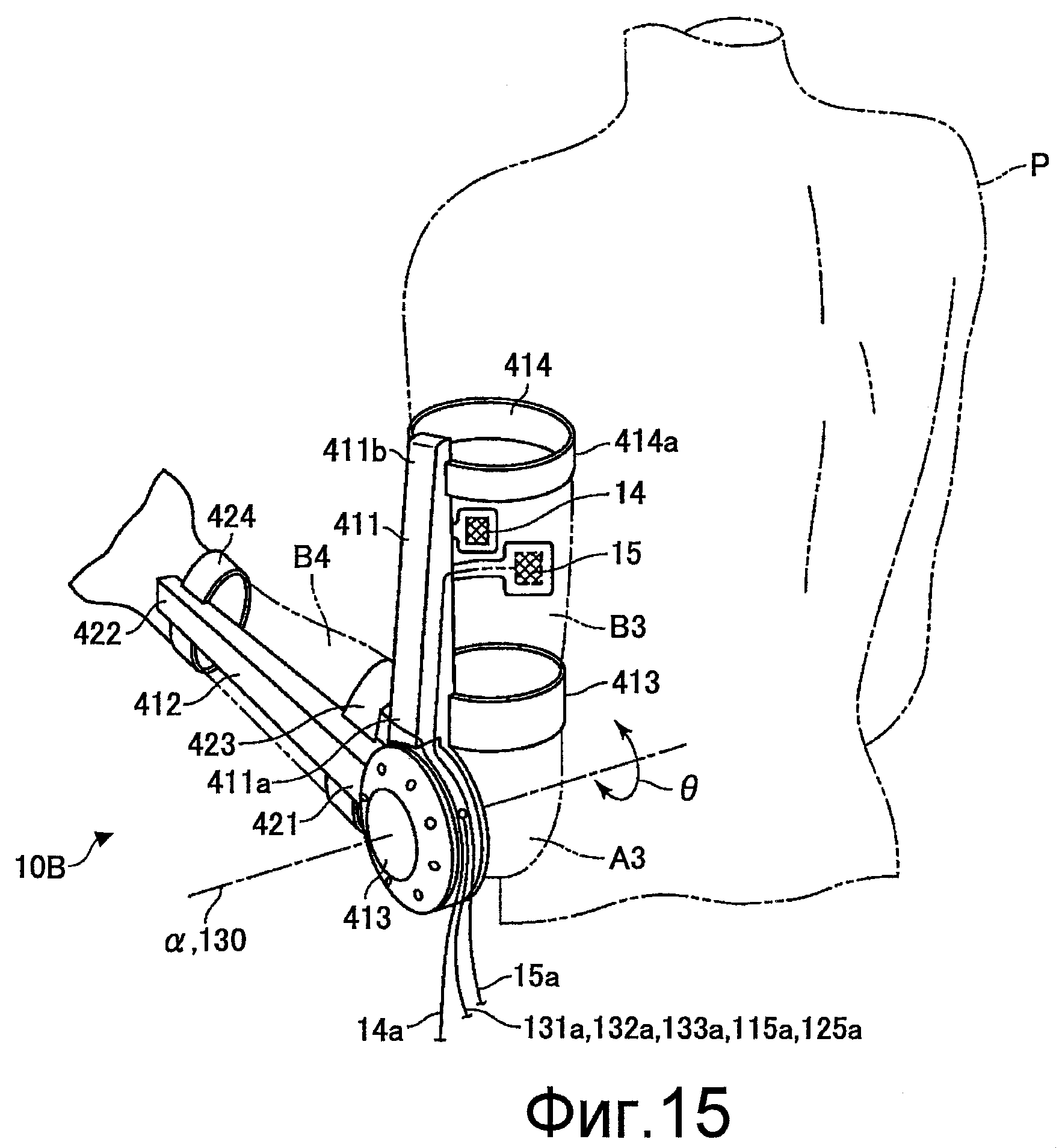
Фиг.15 - вид в перспективе биометрического измерительного устройства, показанного на фиг.14, при наблюдении с противоположной стороны.
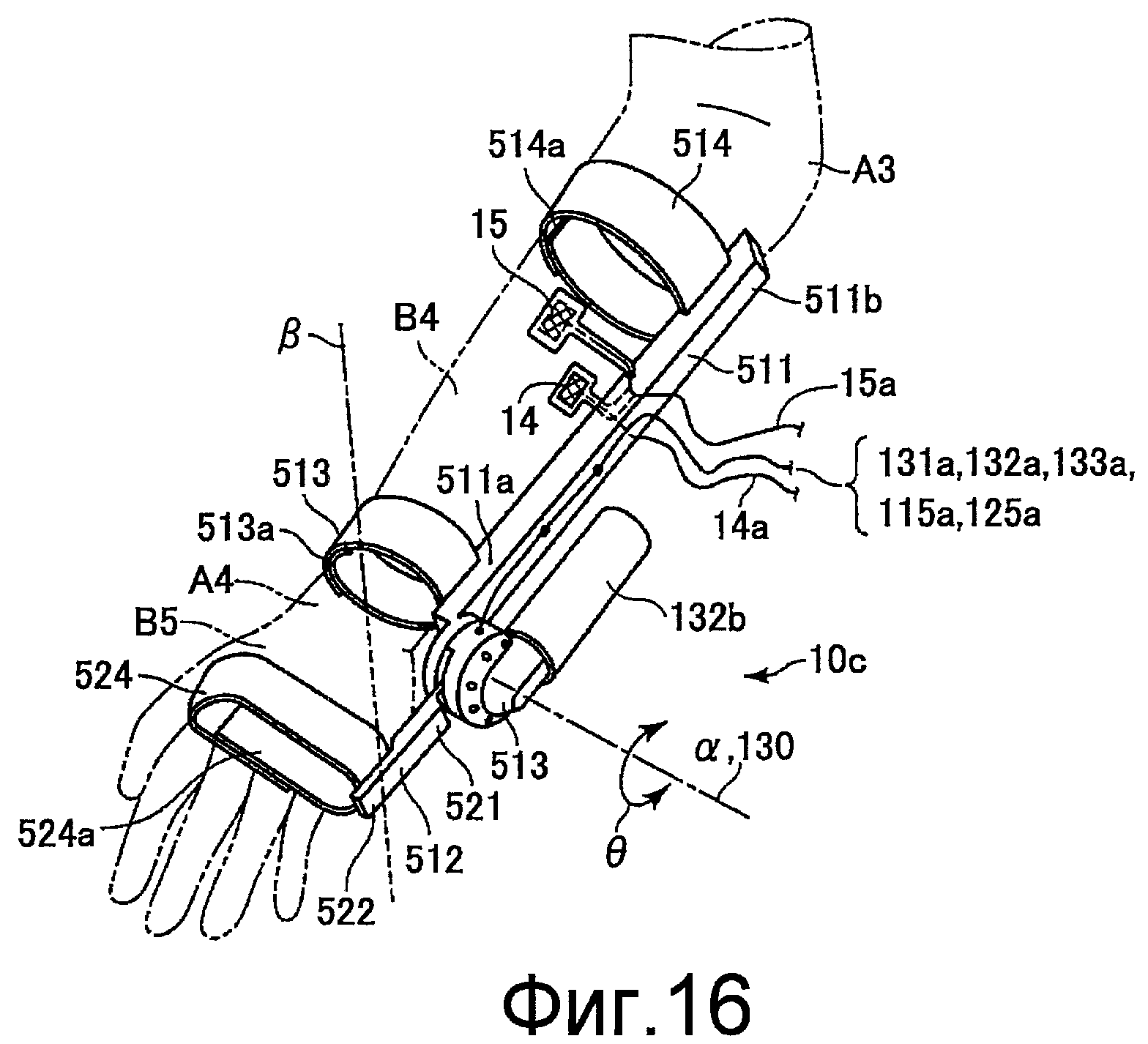
Фиг.16 - вид в перспективе биометрического измерительного устройства для лучезапястного сустава, применяемого в устройстве для поддержки реабилитации в соответствии с четвертым вариантом осуществления изобретения.
ОПИСАНИЕ ПОЗИЦИЙ
1 устройство для поддержки реабилитации
10, 10A-10C биометрическое измерительное устройство
11, 311, 411, 511 первая рама
12, 312, 412, 512 вторая рама
14 датчик биосигнала на стороне сгибания
15 датчик биосигнала на стороне разгибания
16 приспособление
20 блок моделирования (блок индикации)
21 первая моделирующая рама
22 вторая моделирующая рама
23 соединительный элемент
31 блок калибровки
32 блок управления
33 элемент управления моделируемым объектом
34 блок памяти
35 блок коррекции
40 дисплейный блок (блок индикации)
115 первый тензодатчик
125 второй тензодатчик
131 датчик угла поворота
132 приводной блок
133 датчик вращательного момента
231 датчик угла поворота моделируемого объекта
232 приводной блок моделируемого объекта
233 датчик вращательного момента моделируемого объекта
α ось поворота (сустав)
A1 коленный сустав (сустав)
A2 тазобедренный сустав (сустав)
A3 локтевой сустав (сустав)
A4 лучезапястный сустав (сустав)
B1 бедро
B2 голень
B3 плечо
B4 предплечье
B5 ладонь
P человек (тело человека)
НАИЛУЧШИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Описание устройства 1 для поддержки реабилитации в соответствии с первым вариантом осуществления изобретения приведено ниже со ссылкой на фиг.1-10. Устройство 1 для поддержки реабилитации является устройством, которое количественно измеряет движение или двигательную активность сустава в качестве подвижного органа человеческого тела. В частности, устройство 1 для поддержки реабилитации позволяет, до или во время реабилитации для восстановления движения в суставе или двигательной активности сустава, имеющего физическое повреждение вследствие болезни или травмы, количественно измерять движение в суставе или двигательную активность сустава и его произвольно сокращающейся мышцы.
Ниже приведено описание случая, в котором устройство 1 для поддержки реабилитации по настоящему изобретению применяют для осуществления реабилитации коленного сустава A1 человека P, то есть тела человека, проходящего реабилитацию. Как показано на фиг.1, устройство 1 для поддержки реабилитации содержит биометрическое измерительное устройство 10, блок 20 моделирования, устройство 30 управления и дисплейный блок 40. Как показано на фиг.2-4, биометрическое измерительное устройство 10 содержит первую раму 11, вторую раму 12, соединительный блок 13, датчик 14 биосигнала на стороне сгибания и датчик 15 биосигнала на стороне разгибания.
Как показано на фиг.3 и 4, первая рама 11 крепится к бедру B1 человека P, продолжаясь вдоль бедренной кости, являющейся первой скелетной частью, продолжающейся из коленного сустава A1, являющегося объектом измерения. Первая рама 11 снабжена лентами 113 и 114, при этом лента 113 расположена на несущем элементе 111 первой рамы 11 около коленного сустава A1, и лента 114 расположена на концевом элементе 112 первой рамы 11, на удалении от коленного сустава A1. Каждая из лент 113 и 114 выполнена из гибкого материала, обладающего очень малой эластичностью. Ленты 113 и 114 содержат поверхностные застежки 113a и 114a, соответственно, чтобы упомянутые ленты можно было регулировать в размер бедра B1 человека P. Первый тензодатчик 115 прикреплен к несущему элементу 111 первой рамы 11, и напряжение, которое действует на первую раму 11, когда колено сгибают или разгибают, измеряют первым тензодатчиком 115.
Вторая рама 12 крепится к голени B2 человека P, продолжающейся вдоль большеберцовой кости, являющейся второй скелетной частью, которая продолжается из коленного сустава A1 в направлении, противоположном бедренной кости (первой скелетной части). Вторая рама 12 снабжена лентами 123 и 124, при этом лента 123 расположена на несущем элементе 121 второй рамы 12 около коленного сустава A1, и лента 124 расположена на концевом элементе 122 второй рамы 12, на удалении от коленного сустава A1. Подобно лентам 113 и 114 первой рамы 11, каждая из лент 123 и 124 выполнена из гибкого материала, обладающего очень малой эластичностью. Ленты 123 и 124 содержат поверхностные застежки 123a и 124a, соответственно, чтобы упомянутые ленты можно было регулировать в размер голени B2 человека P. Второй тензодатчик 125 прикреплен к несущему элементу 121 второй рамы 12, и напряжение, которое действует на вторую раму 12, когда колено сгибают или разгибают, измеряют вторым тензодатчиком 125. Сигнальные провода 115a и 125a от первого тензодатчика 115 и второго тензодатчика 125 расположены вдоль первой рамы 11.
Как показано на фиг.3, соединительный блок 13 расположен между первой рамой 11 и второй рамой 12 и соединяет с возможностью поворота первую раму 11 и вторую раму 12. Центр 130 поворота соединительного блока 13 располагают коаксиально с осью α поворота коленного сустава A1. Как показано на фиг.2, соединительный блок 13 содержит датчик 131 угла поворота, приводной блок 132 и датчик 133 вращательного момента, которые встроены в соединительный блок 13. Датчик 131 угла поворота обнаруживает положение по углу поворота первой рамы 11 относительно второй рамы 12 и обнаруживает величину θ поворота. Примеры датчика 131 угла поворота могут содержать измерительный преобразователь вращательного движения, переменное сопротивление, переменный конденсатор и т.п.
Приводной блок 132 содержит электродвигатель 132b, который развивает приводное вращательное усилие, и редуктор 132c, который снижает скорость вращения на выходе из электродвигателя 132b. Приводное вращательное усилие электродвигателя передается от приводного блока 132 для поворота первой рамы 11 или второй рамы 12 таким образом, что угол поворота первой рамы 11 относительно второй рамы 12 изменяется в направлении разгибания или сгибания коленного сустава A1. Электродвигатель 132b можно останавливать при произвольном угле поворота, и направление поворота электродвигателя 132b можно обращать, и скорость вращения можно регулировать выходной мощностью электродвигателя 132b. Примером электродвигателя 132b является серводвигатель. Датчик 133 вращательного момента обнаруживает вращательный момент, который действует на центр 130 поворота соединительного блока 13 в соответствии с выходной мощностью электродвигателя 132b. Сигнальный провод 131a датчика 131 угла поворота, кабель 132a питания приводного блока 132 и сигнальный провод 133a датчика 133 вращательного момента расположены по стороне первой рамы 11 в продольном направлении, как показано на фиг.4.
Как показано на фиг.3 и 4, датчик 14 биосигнала на стороне сгибания и датчик 15 биосигнала на стороне разгибания расположены с внутренней стороны ленты 113, расположенной около несущего элемента 111 первой рамы 11. Сигнальные провода 14a и 15a датчиков 14 и 15 расположены вдоль первой рамы 11. Датчик 14 биосигнала на стороне сгибания прикрепляют к поверхности тела, соответствующей любой из полуперепончатой мышцы, полусухожильной мышцы и двуглавой мышцы бедра, которая, в основном, работает как мышца-сгибатель, которая сгибает коленный сустав А1 между бедренной костью и большеберцовой костью, и измеряют передаваемый по нервам сигнал на стороне сгибания и сигнал миоэлектрического потенциала на стороне сгибания, которые составляют биосигнал. Датчик 15 биосигнала на стороне разгибания прикреплен к поверхности тела, соответствующей четырехглавой мышце бедра, которая, в основном, работает как мышца-разгибатель, которая разгибает бедренную кость и большеберцовую кость около коленного сустава A1, и измеряет передаваемый по нервам сигнал на стороне разгибания и сигнал миоэлектрического потенциала на стороне разгибания, которые составляют биосигнал.
Передаваемый по нервам сигнал на стороне сгибания является биосигналом, который формируется слабым электрическим сигналом, передаваемым головным мозгом во время сгибания коленного сустава A1. Сигнал миоэлектрического потенциала на стороне сгибания является биосигналом, который формируется сигналом биопотенциала, передаваемым головным мозгом, когда полуперепончатая мышца, полусухожильная мышца или двуглавая мышца бедра работают как мышца-сгибатель. Передаваемый по нервам сигнал на стороне разгибания является биосигналом, который формируется слабым электрическим сигналом из головного мозга во время разгибания коленного сустава A1. Сигнал миоэлектрического потенциала на стороне разгибания является биосигналом, который формируется сигналом биопотенциала из головного мозга, когда четырехглавая мышца бедра работает как мышца-разгибатель.
Амплитуда сигнала миоэлектрического потенциала на стороне сгибания или сигнала миоэлектрического потенциала на стороне разгибания соотносится со степенью активности мышечной связки. Амплитуда передаваемого по нервам сигнала на стороне сгибания или передаваемого по нервам сигнала на стороне разгибания соотносится с амплитудой сигнала миоэлектрического потенциала на стороне сгибания или сигнала миоэлектрического потенциала на стороне разгибания. Передаваемый по нервам сигнал на стороне сгибания или передаваемый по нервам сигнал на стороне разгибания измеряются до сигнала миоэлектрического потенциала на стороне сгибания и сигнала миоэлектрического потенциала на стороне разгибания.
То есть последовательность передаваемого по нервам сигнала на стороне сгибания и сигнала миоэлектрического потенциала на стороне сгибания и последовательность передаваемого по нервам сигнала на стороне разгибания и сигнала миоэлектрического потенциала на стороне разгибания соответственно обнаруживаются датчиком 14 биосигнала на стороне сгибания и датчиком 15 биосигнала на стороне разгибания. Ниже, для удобства, передаваемый по нервам сигнал на стороне сгибания и сигнал миоэлектрического потенциала на стороне сгибания именуются совместно «биосигналом на стороне сгибания», и передаваемый по нервам сигнал на стороне разгибания и сигнал миоэлектрического потенциала на стороне разгибания именуются совместно «биосигналом на стороне разгибания».
Как показано на фиг.1, блок 20 моделирования является примером блока индикации, который обеспечивает визуальную или тактильную информацию. Как показано на фиг.1 и 2, блок 20 моделирования содержит первую моделирующую раму 21 и вторую моделирующую раму 22, которые расположены независимо от первой рамы 11 и второй рамы 12. Блок 20 моделирования дополнительно содержит соединительный элемент 23, который соединяет первую моделирующую раму 21 и вторую моделирующую раму 22 таким образом, что рамы 21 и 22 могут поворачиваться одна относительно другой. Соединительный элемент 23 содержит датчик 231 угла поворота моделируемого объекта, приводной блок 232 моделируемого объекта и датчик 233 вращательного момента моделируемого объекта, которые встроены в соединительный элемент 23.
Датчик 231 угла поворота моделируемого объекта обнаруживает положение по углу поворота первой моделирующей рамы 21 относительно второй моделирующей рамы 22 и обнаруживает величину ϕ поворота. Примеры датчика 231 угла поворота моделируемого объекта могут включать в себя измерительный преобразователь вращательного движения, переменное сопротивление, переменный конденсатор и т.п.
Аналогично вышеупомянутому приводному блоку 132, приводной блок 232 моделируемого объекта содержит электродвигатель 232b и редуктор 232c, которые встроены в приводной блок 232 моделируемого объекта. Выходной вал приводного блока 232 моделируемого объекта расположен коаксиально с центром поворота датчика 231 угла поворота моделируемого объекта и поворачивает вторую моделирующую раму 22 относительно первой моделирующей рамы 21. Аналогично электродвигателю приводного блока 132, электродвигатель 232b можно останавливать при произвольном угле поворота, направление поворота электродвигателя 232b можно переключать либо в направлении сгибания, либо в направлении разгибания, и скорость вращения можно свободно регулировать в соответствии с выходной мощностью электродвигателя 232b. Примером электродвигателя 232b является серводвигатель.
Блок 20 моделирования содержит тензодатчик 215, прикрепленный к первой моделирующей раме 21, и тензодатчик 225, прикрепленный ко второй моделирующей раме 22. Блок 20 моделирования может измерять нагрузку, которая действует на блок 20 моделирования с использованием датчика 233 вращательного момента моделируемого объекта соединительного элемента 23 и тензодатчиков 215 и 225 первой моделирующей рамы 21 и второй моделирующей рамы 22.
Устройством 30 управления служит компьютер. Как показано на фиг.2, устройство 30 управления содержит блок 31 калибровки, блок 32 управления, элемент 33 управления моделируемым объектом, блок 34 памяти и блок 35 коррекции. Соответствующие программы управления заранее вводят в память в устройстве 30 управления, чтобы устройство 30 управления могло исполнять соответствующие управляющие процессы, которые показаны на фиг.5, фиг.8, фиг.9 и фиг.10, которые описаны в последующем.
В ответ на запрос из блока 32 управления блок 31 калибровки считывает соответствующие измеренные значения датчика 14 биосигнала на стороне сгибания, датчика 15 биосигнала на стороне разгибания, датчика 131 угла поворота, датчика 133 вращательного момента, первого тензодатчика 115 и второго тензодатчика 125, которые получают одновременно. Блок 31 калибровки выставляет соответственно индивидуальную величину коррекции для калибровки опорного потенциала, который изменяется для каждого человека P и для каждого сустава, величину коррекции на стороне сгибания для калибровки выходного значения датчика 14 биосигнала на стороне сгибания и величину коррекции на стороне разгибания для коррекции выходного значения датчика 15 биосигнала на стороне разгибания. Индивидуальная величина коррекции, величина коррекции на стороне сгибания и величина коррекции на стороне разгибания выставляются блоком 31 калибровки, что представляет собой процесс калибровки, исполняемый блоком управления.
Блоком 32 управления служит CPU (центральный процессор). На основании информации, собранной с использованием датчика 14 биосигнала на стороне сгибания, датчика 15 биосигнала на стороне разгибания, датчика 131 угла поворота, датчика 133 вращательного момента и датчика 231 угла поворота моделируемого объекта, и на основании величины коррекции на стороне сгибания и величины коррекции на стороне разгибания, полученных из блока 31 калибровки, блок 32 управления управляет электродвигателем 132b приводного блока 132. Сигналы (информация), выдаваемые датчиком 14 биосигнала на стороне сгибания и датчиком 15 биосигнала на стороне разгибания из числа датчиков биометрического измерительного устройства 10, вводятся в блок 31 калибровки и блок 35 коррекции. В данном варианте осуществления сигналы, выдаваемые другими датчиками, в том числе датчиком 14 биосигнала на стороне сгибания, датчиком 15 биосигнала на стороне разгибания, первым тензодатчиком 115, вторым тензодатчиком 125, датчиком 131 угла поворота и датчиком 133 вращательного момента, вводятся в блок 31 калибровки и вводятся также в блок 32 управления в виде информации о физических величинах.
Из соответствующих датчиков собирается следующая информация. В случае датчика 14 биосигнала на стороне сгибания и датчика 15 биосигнала на стороне разгибания собранная информация является биосигналом, который формируется обнаруженным сигналом биопотенциала. В случае датчика 131 угла поворота и датчика 231 угла поворота моделируемого объекта собранная информация является обнаруженным сигналом, который указывает положение по углу поворота, или цифровыми данными, полученными посредством обнаруженного сигнала. В случае датчика 133 вращательного момента собранная информация является обнаруженным сигналом, который указывает вращательный момент, который действует на приводной блок 132, или цифровыми данными, полученными посредством обнаруженного сигнала.
Блок 32 управления использует составляющую передаваемого по нервам сигнала на стороне сгибания биосигнала на стороне сгибания, входящую в выходной сигнал мышцы-сгибателя, и составляющую передаваемого по нервам сигнала на стороне разгибания биосигнала на стороне разгибания, входящую в выходной сигнал мышцы-разгибателя, в качестве запускающего сигнала, который приводит в действие электродвигатель 132b приводного блока 132. Таким образом, биометрическое измерительное устройство 10, которое содержит приводной блок 132, почти не дает человеку P ощутить задержку относительно движения.
На основании выходного сигнала мышцы-сгибателя, выходного сигнала мышцы-разгибателя, положения по углу поворота датчика 131 угла поворота и положения по углу поворота датчика 231 угла поворота моделируемого объекта элемент 33 управления моделируемым объектом управляет приводным блоком 232 моделируемого объекта и поворачивает первую моделирующую раму 21 и вторую моделирующую раму 22. Аналогично блоку 32 управления, элемент 33 управления моделируемым объектом использует, в качестве запускающего сигнала, который приводит в действие электродвигатель 232b приводного блока 232 моделируемого объекта, составляющую передаваемого по нервам сигнала на стороне сгибания биосигнала на стороне сгибания, входящую в выходной сигнал мышцы-сгибателя, и составляющую передаваемого по нервам сигнала на стороне разгибания биосигнала на стороне разгибания, входящую в выходной сигнал мышцы-разгибателя.
Блок 34 памяти является памятью, которая встроена в устройство 30 управления. Блок 34 памяти сохраняет величину коррекции на стороне сгибания и величину коррекции на стороне разгибания, которые выставляются блоком 31 калибровки, и сохраняет индивидуальные величины коррекции биосигналов, которые различны для отдельных людей P. Блок 35 коррекции корректирует выходное значение датчика 14 биосигнала на стороне сгибания на основании величины коррекции на стороне сгибания и корректирует выходное значение датчика 15 биосигнала на стороне разгибания на основании величины коррекции на стороне разгибания. Блок 35 коррекции выдает выходной сигнал мышцы-сгибателя, скорректированный на основании величины коррекции на стороне сгибания, выходной сигнал мышцы-разгибателя, скорректированный на основании величины коррекции на стороне разгибания, и положение по углу поворота, соответственно, в каждый из блока 32 управления и элемента 33 управления моделируемым объектом.
Дисплейный блок 40 является примером блока индикации, который обеспечивает визуальную информацию. Дисплейный блок 40 является монитором, который отображает числовые значения или графики, такие как соответствующие измеренные биосигналы измеренных данных, на экране 41 блока 32 управления. Например, данные, отображаемые на экране 41, содержат выходные значения датчика 14 биосигнала на стороне сгибания и датчика 15 биосигнала на стороне разгибания, положение по углу поворота датчика 131 угла поворота, обнаруженное значение датчика 133 вращательного момента, обнаруженные значения напряжения первого тензодатчика 115 и второго тензодатчика 125, величину коррекции на стороне сгибания и величину коррекции на стороне разгибания, которые выставляются блоком 31 калибровки, индивидуальную величину коррекции, которая изменяется для каждого органа, являющегося объектом измерения, и т.п. Способ отображения на экране 41 состоит в том, чтобы установить виртуальное пространство и отобразить диаграмму, эквивалентную блоку 20 моделирования.
Устройство 1 для поддержки реабилитации выставляют с помощью процессов и способов, показанных на фиг.5-10, и применяют для реабилитации. Сначала выполняется процесс инициализации, который инициализирует индивидуальную величину коррекции, которая изменяется для каждого сустава и для каждого человека P, в соответствии с управляющим процессом, показанным на фиг.5.
Ниже приведено описание случая, когда биометрическое измерительное устройство 10 прикрепляют к правой ноге человека P, как показано на фиг.3 и 4.
После того как биометрическое измерительное устройство 10 надевают на правую ногу (коленный сустав A1) человека P, начинается работа с биометрическим измерительным устройством 10, если включают переключатель питания. Работа с биометрическим измерительным устройством 10, выполняемая с этого момента, состоит в прикреплении датчика 14 биосигнала на стороне сгибания к поверхности тела (где можно легко снимать биосигнал), соответствующей любой из полуперепончатой мышцы, полусухожильной мышцы и двуглавой мышцы бедра (которая служит мышцей-сгибателем), и прикреплении датчика 15 биосигнала на стороне разгибания к поверхности тела (где можно легко снимать биосигнал), соответствующей четырехглавой мышце бедра (которая служит мышцей-разгибателем).
Биометрическое измерительное устройство 10 располагают так, чтобы центр 130 поворота соединительного блока 13 был коаксиален оси α поворота коленного сустава A1 человека P, и фиксируют к правой ноге человека P с помощью лент 113, 114, 123, 124. Ленты 113 и 114, прикрепленные к первой раме 11, обертывают вокруг обоих концов бедра человека P так, чтобы датчик 14 биосигнала на стороне сгибания и датчик 15 биосигнала на стороне разгибания прижимались к мышце-сгибателю и мышце-разгибателю человека P, соответственно.
После начала процесса инициализации, показанного на фиг.5, устройство 30 управления обнаруживает, включен ли переключатель питания биометрического измерительного устройства 10 (S1). Когда на этапе S1 обнаружено, что переключатель питания биометрического измерительного устройства 10 включен, то процесс управления переходит к этапу S2.
Затем, датчиком 14 биосигнала на стороне сгибания и датчиком 15 биосигнала на стороне разгибания измеряют, соответственно, опорный потенциал (биосигнал) на стороне сгибания и опорный потенциал (биосигнал) на стороне разгибания человека P, когда человек P сидит на стуле в не активном состоянии, в котором мышца-сгибатель и мышца-разгибатель не работают, и измеренные опорные потенциалы на стороне сгибания и на стороне разгибания сохраняют в блоке 34 памяти (S2).
Затем, человек P находится в не активном состоянии, и коленный сустав A1 человека P пассивно осуществляет движение с помощью инструктора T по реабилитации, например врача или физиотерапевта. Диапазон подвижности коленного сустава A1 измеряют с использованием датчика 131 угла поворота соединительного блока 13 (S3). Диапазон подвижности измеряют на основании крайних положений по углу поворота на стороне сгибания и на стороне разгибания, измеренных датчиком 131 угла поворота, и данные измерения диапазона подвижности сохраняют в блоке 34 памяти (S4).
Данный диапазон подвижности является диапазоном, в котором сустав можно поворачивать в зависимости от податливости коленного сустава A1, без приложения мышечной силы, и отличается от рабочего диапазона, в котором движение в суставе может выполняться активно в зависимости от мышечной силы. Данный диапазон подвижности измеряют, чтобы гарантированно не допустить повреждения сухожилия или мышцы во время реабилитации, которая будет выполняться позднее.
При измерении диапазона подвижности коленного сустава A1 человек P выполняет действие по разгибанию, при котором происходит резкое движение вверх голени B2 по его собственному намерению, как показано на фиг.6. Если диапазон подвижности очень узок из-за ослабления мышечной силы или диапазон подвижности ограничен по причине амиотрофии, или если движение в суставе затруднено из-за физической недееспособности человека, то мышечную силу измеряют в пределах диапазона подвижности.
Если мышца-разгибатель работает по намерению человека P, то коленный сустав A1 будет разгибаться. Когда коленный сустав A1 разгибается, угол поворота коленного сустава A1 одновременно измеряют датчиком 131 угла поворота (S5). Затем, на этапе S5a обнаруживают, превышает ли угол поворота, измеренный датчиком 131 угла поворота, нулевое значение. Когда угол поворота, измеренный датчиком 131 угла поворота, больше, чем нуль, то процесс управления переходит к этапу S6. На этапе S6 измеряют величину изменения угла поворота, и биосигнал на стороне сгибания и биосигнал на стороне разгибания (потенциальные сигналы) измеряют датчиком 14 биосигнала на стороне сгибания и датчиком 15 биосигнала на стороне разгибания.
Затем, человек P выполняет действие по сгибанию коленного сустава A1 по его собственному намерению. Например, когда человеку P трудно согнуть коленный сустав A1 в позиции, в которой человек садится на стул, человек P может лежать животом вниз на постели и поднимать голень B2. В альтернативном варианте человек P может стоять прямо и поднимать голень B2. Затем, аналогично случаю действия по разгибанию, измеряют мышечную силу в пределах диапазона подвижности коленного сустава A1 и при этом измеряют величину изменения положения по углу поворота датчиком 131 угла поворота (S7). Угол поворота, измеренный датчиком 131 угла поворота, сохраняют в блоке 34 памяти (S8).
Затем, на этапе S8a обнаруживают, превышает ли угол поворота, измеренный датчиком 131 угла поворота, нулевое значение. Когда на этапе S8a обнаружено, что угол поворота, измеренный датчиком 131 угла поворота, больше, чем нуль, то процесс управления переходит к этапу S9. На этапе S9 биосигнал на стороне сгибания и биосигнал на стороне разгибания (потенциальные сигналы) измеряют датчиком 14 биосигнала на стороне сгибания и датчиком 15 биосигнала на стороне разгибания и положение по углу поворота и биосигналы мышцы-разгибателя и мышцы-сгибателя, собранные во время действия по сгибанию, сохраняют в блоке 34 памяти.
Затем, с использованием блока 31 калибровки связывают измеренное значение каждого биосигнала и положения по углу поворота, когда измеренное значение получено (S10). Каждое измеренное значение выводят на дисплейный блок 40 и числовые значения или графики отображают на экране 41 (S11). Путем проверки измеренного значения на экране 41, отображаемого на дисплейном блоке 40, инструктор T может немедленно определить, прикреплены ли датчик 14 биосигнала на стороне сгибания и датчик 15 биосигнала на стороне разгибания, соответственно, в положениях, соответствующих мышце-сгибателю и мышце-разгибателю, и определить, показывают ли данные измерений, полученные из положений прикрепления, достаточное значение в качестве биосигнала.
С этого момента можно получить более точную корреляцию путем дальнейшего применения величин коррекции с учетом влияния веса второй рамы 12 и величин коррекции с учетом влияния силы тяжести, которая действует на голень B2. В результате вышеупомянутой корреляции блок 31 калибровки определяет корреляцию между положением по углу поворота, биосигналом на стороне сгибания и биосигналом на стороне разгибания. Блок 31 калибровки определяет величину коррекции для действия на стороне сгибания и величину коррекции для действия на стороне разгибания на основании величины изменения угла поворота, обнаруженного датчиком 131 угла поворота, времени поворота первой рамы 11 и второй рамы 12 на величину изменения угла поворота и импульса, определяемого из выходных величин датчика 14 биосигнала на стороне сгибания и датчика 15 биосигнала на стороне разгибания, пока рамы не повернутся на величину изменения угла поворота (S12). Затем, величина коррекции для действия на стороне сгибания и величина коррекции для действия на стороне разгибания, определенные на этапе S12, сохраняют в блоке 34 памяти (S13). Величина коррекции для действия на стороне сгибания является частью величины коррекции на стороне сгибания, и величина коррекции для действия на стороне разгибания является частью величины коррекции на стороне разгибания. После этого процесс инициализации завершается.
После того как вышеупомянутый процесс инициализации завершается, выполняется процесс выходной настройки. В процессе выходной настройки измеряют взаимосвязь между мышечной силой на стороне разгибания или на стороне сгибания и соответствующим биосигналом человека P и выполняют выходную настройку биосигнала, когда прилагается максимальная мышечная сила. Кроме того, измеряют биосигнал, когда прилагается мышечная сила для выдерживания постепенно прилагаемой нагрузки. Вышеупомянутый процесс инициализации и процесс выходной настройки выполняют каждый раз, когда биометрическое измерительное устройство 10 прикрепляют к человеку P.
Как показано на фиг.7, угол первой рамы 11 относительно второй рамы 12 фиксируют равным некоторому углу в середине диапазона подвижности сустава и, в данном состоянии, процесс выходной настройки выполняют согласно блок-схеме последовательности операций, показанной на фиг.8. В состоянии, показанном на фиг.7, коленный сустав A1 сгибают до почти прямого угла. Однако связь с положением по углу поворота определяется в результате вышеописанного процесса инициализации. Когда диапазон подвижности сустава сужен из-за сокращения мышечного волокна, или когда диапазон, в котором может прилагаться мышечная сила, ограничен, процесс выходной настройки можно выполнять в состоянии, отличном от проиллюстрированного на фиг.7.
После начала процесса выходной настройки, показанного на фиг.8, устройство 30 управления обнаруживает, исправен ли приводной блок 132 биометрического измерительного устройства 10, соединенного с устройством 1 для поддержки реабилитации (S21). Когда на этапе S21 обнаружено, что приводной блок 132 исправен, угол первой рамы 11 относительно второй рамы 12 фиксируют путем приложения движущей силы электродвигателя 132b приводного блока 132 (S22).
Когда на этапе S21 обнаружено, что приводной блок 132 не исправен, на дисплейном блоке 40 отображается указание, что следует применить отдельно приготовленное приспособление для фиксации соединительного блока 13 так, чтобы угол первой рамы 11 относительно второй рамы 12 не изменялся (S23).
Когда используют приспособление 16 для фиксации первой рамы 11 и второй рамы 12, необходимо заранее скорректировать взаимосвязь между нагрузкой, прилагаемой на соединительный блок 13 в направлении сгибания или разгибания, и выходными значениями первого тензодатчика 115 и второго тензодатчика 125.
На дисплейном блоке 40 отображается указание, что человека P просят приложить максимальную мышечную силу в направлении разгибания в данном состоянии (S24). При этом каждый биосигнал измеряют датчиком 14 биосигнала на стороне сгибания и датчиком 15 биосигнала на стороне разгибания. Кроме того, соответственно измеряют вращательный момент, положение по углу поворота, напряжение, действующее на первую раму 11, и напряжение, действующее на вторую раму 12, в качестве физических величин сустава (S25). Вращательный момент измеряют датчиком 133 вращательного момента, прикрепленным к оси поворота приводного блока 132. Положение по углу поворота измеряют датчиком 131 угла поворота. Напряжение, действующее на первую раму 11, измеряют первым тензодатчиком 115, и напряжение, действующее на вторую раму 12, измеряют вторым тензодатчиком 125.
Затем, на дисплейном блоке 40 отображается указание, что человека P просят приложить максимальную мышечную силу в направлении сгибания в том же самом состоянии (S26). При этом также каждый биосигнал измеряют датчиком 14 биосигнала на стороне сгибания и датчиком 15 биосигнала на стороне разгибания. Кроме того, соответственно измеряют вращательный момент, положение по углу поворота, напряжение, действующее на первую раму 11, и напряжение, действующее на вторую раму 12, в качестве физических величин сустава (S27). Вращательные моменты и напряжения, измеренные при выполнении действия на разгибание и действия на сгибание, преобразуют в данные мышечной силы, которая прилагается коленным суставом A1, являющимся объектом измерения.
Когда приводной блок 132 не исправен, первую раму 11 и вторую раму 12 фиксируют вместе приспособлением 16. Поэтому, если взаимосвязь между внешним усилием и значениями напряжений первого тензодатчика 115 и второго тензодатчика 125 в состоянии, в котором первая рама 11 и вторая рама 12 зафиксированы вместе, измеряют заранее, то величину мышечной силы для разгибания или сгибания в суставе можно определить измерением значений напряжений первого тензодатчика 115 и второго тензодатчика 125.
Биосигналы и физические величины сустава связывают между собой и данные измерения мышечной силы, полученные из физических величин, связывают с физическими величинами с использованием блока 31 калибровки (S28). Биосигналы, физические величины и данные измерений мышечной силы сохраняют в блоке 34 памяти, соответственно, и выводят в дисплейный блок 40 через блок 32 управления так, чтобы числовые значения или графики отображались на экране 41 дисплейного блока 40 (S29). При визуализации биосигналов, физических величин сустава и мышечной силы в количественном виде числовых значений или графиков можно выявить взаимосвязь между намерением человека P и фактически прикладываемой мышечной силой. Таким образом, можно усилить связь между инструктором T и человеком P.
На вышеупомянутом этапе S28 величину коррекции выходных данных на стороне сгибания, которая связывает биосигнал на стороне сгибания и мышечную силу на стороне сгибания, и величину коррекции выходных данных на стороне разгибания, которая связывает биосигнал на стороне разгибания и мышечную силу на стороне разгибания, определяют с помощью блока 31 калибровки. Определенные величины коррекции сохраняют в блоке 34 памяти. Величина коррекции выходных данных на стороне сгибания является частью величины коррекции на стороне сгибания и применяется в сочетании с величиной коррекции для действия на стороне сгибания. Величина коррекции выходных данных на стороне разгибания является частью величины коррекции на стороне разгибания и применяется в сочетании с величиной коррекции для действия на стороне разгибания.
Затем, на этапе S30 с использованием элемента 33 управления моделируемым объектом в блоке 20 моделирования (который является блоком индикации, который обеспечивает визуальную или тактильную информацию), выходной сигнал мышцы-сгибателя, который получают при прибавлении величины коррекции на стороне сгибания к выходной величине датчика 14 биосигнала на стороне сгибания, выходной сигнал мышцы-разгибателя, который получают при прибавлении величины коррекции на стороне разгибания к выходной величине датчика 15 биосигнала на стороне разгибания, и положение по углу поворота датчика 131 угла поворота преобразуют в выходные сигналы, подаваемые в приводной блок 232 моделируемого объекта.
Блок 20 моделирования выполнен с возможностью такого моделирования действия человека P, что блок 20 моделирования синхронизирован с действием человека P и перемещается на величину φ поворота и со скоростью поворота, которые идентичны таковым в случае, когда человек P совершает движение в коленном суставе A1 в пределах диапазона подвижности. В данном состоянии реальные действие по сгибанию и действие по разгибанию коленного сустава A1 человека P моделируются блоком 20 моделирования (S31). Таким образом, при реальном перемещении блока 20 моделирования в зависимости от мышечной силы человека P можно легко распознать взаимосвязь между биосигналом произвольно сокращающейся мышцы, которая производит движение в суставе, и соответствующим действием и можно легко определить план действий по реабилитации, его содержание и степень восстановления посредством связи между человеком P и инструктором T.
Когда диапазон подвижности коленного сустава A1 содержит запас на рабочий диапазон, в котором человек P может совершать движение с помощью своей мышечной силы, величину коррекции растяжения на стороне разгибания и величину коррекции растяжения на стороне сгибания добавляют так, что диапазон подвижности коленного сустава A1 не превышается даже при погрешности биосигнала, и величина ϕ поворота блока 20 моделирования увеличивается. Величину коррекции растяжения на стороне разгибания и величину коррекции растяжения на стороне сгибания сохраняют в блоке 34 памяти (S32).
Если корреляцию между биосигналом и действием человека P можно выставить посредством блока 20 моделирования, то выходной сигнал мышцы-разгибателя и выходной сигнал мышцы-сгибателя преобразуют в выходные сигналы в приводной блок 132 (S33). С этого момента можно включать величину коррекции растяжения на стороне сгибания и величину коррекции растяжения на стороне разгибания. И, наконец, завершается фиксированное состояние приводного блока 132 и завершается фиксированное состояние соединительного блока 13 (S34). Когда используют приспособление 16, приспособление 16 снимают вручную.
Затем, устройство 30 управления выполняет процесс измерения мышечной силы, в ходе которого измеряется каждая мышечная сила сустава, являющегося объектом измерения, для, по меньшей мере, двух этапов приложения нагрузки в направлении разгибания и в направлении сгибания, в соответствии с блок-схемой, показанной на фиг.9.
После начала процесса измерения мышечной силы, показанного на фиг.9, устройство 30 управления обнаруживает, включен ли переключатель питания биометрического измерительного устройства 10 (S41). Когда на этапе S41 обнаружено, что переключатель питания биометрического измерительного устройства 10 включен, то процесс управления переходит к этапу S42. В предпочтительном варианте приводной блок 132 используют в качестве средства для приложения нагрузки. В альтернативном варианте для приложения нагрузки можно применить груз или силу пружины. Если контроль осуществляется после того, как завершены процессы инициализации и выходной настройки, то процесс управления немедленно переходит к процессу измерения.
Величины коррекции биосигнала человека P считывают из блока 34 памяти (S42). Затем определяют нагрузку в направлении сгибания на основании величины коррекции для действия на стороне сгибания и величины коррекции выходных данных на стороне сгибания, считанных из блока 34 памяти (S43).
Затем, электродвигатель 132b приводного блока 132 приводят в движение для приложения нагрузки к коленному суставу A1 (S44). На дисплейном блоке 40 отображается указание, что человека P просят зафиксировать коленный сустав A1 так, чтобы коленный сустав A1 не мог двигаться под нагрузкой, приложенной приводным блоком 132 (S45). Данные измерения каждого из биосигнала на стороне разгибания и биосигнала на стороне сгибания, вращательного момента, обнаруженного датчиком 133 вращательного момента, положения по углу поворота, обнаруженного датчиком 131 угла поворота, напряжения, обнаруженного первым тензодатчиком 115, и напряжения, обнаруженного вторым тензодатчиком 125, считывают и соответствующие данные сохраняют в блоке 34 памяти (S46).
Затем обнаруживают, собираются ли необходимые данные, когда выполняются, по меньшей мере, два этапа приложения нагрузки на основании величины коррекции выходных данных на стороне сгибания (S47). Когда все необходимые данные не собираются, существует возможность, что прилагаемая нагрузка слишком мала, и процесс управления переходит на этап S47a. На этапе S47a прилагаемую нагрузку изменяют и процедуру по этапам S43-S47 снова выполняют так, что нагрузка, прилагаемая приводным блоком 132, постепенно увеличивается.
Когда на этапе S47 обнаружено, что необходимые данные на стороне сгибания собираются, блоком 31 калибровки определяется величина коррекции мышечной силы на стороне сгибания применительно к взаимосвязи между мышечной силой на стороне сгибания и биосигналом (S48).
После того как на этапе S48 определена величина коррекции мышечной силы на стороне сгибания, определяют нагрузку в направлении разгибания на основании величины коррекции для действия на стороне разгибания и величины коррекции выходных данных на стороне разгибания (S49). Затем, электродвигатель 132b приводного блока 132 приводят в движение для приложения нагрузки к коленному суставу A1 (S50).
На дисплейном блоке 40 отображается указание, что человека P просят зафиксировать коленный сустав A1 так, чтобы коленный сустав A1 не мог двигаться под прилагаемой нагрузкой (S51). Данные измерений каждого из биосигнала на стороне разгибания и биосигнала на стороне сгибания, вращательного момента, обнаруженного датчиком 133 вращательного момента, положения по углу поворота, обнаруженного датчиком 131 угла поворота, напряжения, обнаруженного первым тензодатчиком 115, и напряжения, обнаруженного вторым тензодатчиком 125, считывают и соответствующие данные сохраняют в блоке 34 памяти (S52).
Затем, обнаруживают, собираются ли необходимые данные, когда выполняются, по меньшей мере, два этапа приложения нагрузки на основании величины коррекции выходных данных на стороне разгибания (S53). Когда все необходимые данные не собираются, существует возможность, что прилагаемая нагрузка слишком мала, и процесс управления переходит на этап S53a. На этапе S53a прилагаемую нагрузку изменяют и процедуру по этапам S49-S53 снова выполняют так, что нагрузка, прилагаемая приводным блоком 132, постепенно увеличивается.
Когда на этапе S53 обнаружено, что все необходимые данные на стороне разгибания собираются, блоком 31 калибровки определяется величина коррекции мышечной силы на стороне разгибания применительно к взаимосвязи между мышечной силой на стороне разгибания и биосигналом (S54).
Величину коррекции мышечной силы на стороне сгибания и величину коррекции мышечной силы на стороне разгибания, определенные на этапах S48 и S54, сохраняют в блоке 34 памяти (S55). Числовые значения или графики с этапов приложения нагрузки на стороне сгибания, этапов приложения нагрузки на стороне разгибания, биосигнал на стороне сгибания и биосигнал на стороне разгибания формируют и числовые значения или графики отображают на дисплейном блоке 40 (S56). Величина коррекции мышечной силы на стороне сгибания является частью величины коррекции на стороне сгибания, и величина коррекции мышечной силы на стороне разгибания является частью величины коррекции на стороне разгибания.
Как пояснялось выше, устройство 1 для поддержки реабилитации в соответствии с данным вариантом осуществления выполнено так, что биометрическое измерительное устройство 10 крепится к суставу (например, коленному суставу A1), который является объектом реабилитации, и имеется возможность измерения корреляции между биосигналом и мышечной силой и корреляции между биосигналом и положением по углу поворота на стороне разгибания или стороне сгибания простым действием. Устройство 1 для поддержки реабилитации в соответствии с данным вариантом осуществления может выполнять измерение с корреляцией между физическими величинами, такими как диапазон подвижности сустава или мышечная сила произвольно сокращающихся мышц человека P, который проходит реабилитацию, и сохраняемыми биосигналами и может выдавать результат измерения в количественном виде. В данном варианте осуществления дисплейный блок 40, который обеспечивает визуальную информацию, и блок 20 моделирования, который обеспечивает визуальную или тактильную информацию, обеспечены как блок индикации, и информация о мышечной силе и ощущении человека P может распознаваться инструктором T, осуществляющим реабилитацию, например врачом, физиотерапевтом и т.п.
Далее, со ссылкой на фиг.10, приведено описание процесса реабилитации с использованием блока 20 моделирования.
После начала процесса реабилитации, показанного на фиг.10, устройство 30 управления обнаруживает, включен ли переключатель питания биометрического измерительного устройства 10 (S61). Когда на этапе S61 обнаружено, что переключатель питания биометрического измерительного устройства 10 включен, то процесс управления переходит к этапу S62.
Так как величина коррекции выходных данных на стороне сгибания и величина коррекции выходных данных на стороне разгибания выставлены в процессе вышеописанной выходной настройки, то приблизительная компенсация измеренной мышечной силы человека P может выполняться сравнением с предшествующими данными измерений. После того как процесс инициализации и процесс выходной настройки выполнены, из блока 34 памяти считывают опорный биосигнал, величину коррекции на стороне сгибания, величину коррекции на стороне разгибания, величину коррекции растяжения на стороне сгибания и величину коррекции растяжения на стороне разгибания в качестве предыдущих величин коррекции и выполняют процессы сравнения и повторной установки (S62). Реабилитация может быть начата приведением в действие блока 20 моделирования с использованием соответствующих величин коррекции, заранее сохраненных в блоке 34 памяти, для подтверждения работы.
Как показано на фиг.1 и 2, блок 20 моделирования содержит соединительный элемент 23, в котором расположены датчик 231 угла поворота и датчик 233 вращательного момента моделируемого объекта, и первую моделирующую раму 21 и вторую моделирующую раму 22, в которых расположены тензодатчики 215 и 225. Вращательные моменты и напряжения, которые определяются упомянутыми датчиками, подаются обратно в блок 32 управления и элемент 33 управления моделируемым объектом устройства 30 управления и отражаются на работе приводного блока 132 биометрического измерительного устройства 10 и приводного блока 232 моделируемого объекта блока 20 моделирования.
Когда блок 20 моделирования связан с биометрическим измерительным устройством 10, которое прикреплено к человеку P, то у человека запрашивается выбор одного из альтернативного варианта, в котором блок 20 моделирования используют как основной объект, и альтернативного варианта, в котором биометрическое измерительное устройство 10 используют как основной объект, (S63). Когда на этапе S63 выбран альтернативный вариант, в котором в качестве основного объекта используют биометрическое измерительное устройство 10, то процесс управления переходит на этап S64. На этапе S64 на дисплейном блоке 40 отображается указание, что человека P просят приложить мощность к мышце-сгибателю и мышце-разгибателю в коленном суставе A1 для движения коленного сустава A1.
Затем, считывают данные измерений каждого из вращательного момента, обнаруженного датчиком 133 вращательного момента биометрического измерительного устройства 10, положения по углу поворота, обнаруженного датчиком 131 угла поворота, напряжения, обнаруженного первым тензодатчиком 115, и напряжения, обнаруженного вторым тензодатчиком 125, выполняют измерение биосигнала на стороне сгибания и стороне разгибания и измерение физической величины и соответствующие данные измерений сохраняют в блоке 34 памяти (S65).
На основании величин коррекции, считанных из блока 34 памяти блоком 35 коррекции, и соответствующих значений измерительных данных, измеренных на этапе S65, выходной сигнал мышцы-разгибателя и выходной сигнал мышцы-сгибателя выдаются в блок 32 управления и элемент 33 управления моделируемым объектом (S66).
Электродвигатель 132b приводного блока 132 работает с управлением от приводного сигнала, выдаваемого из блока 32 управления, и электродвигатель 232b приводного блока 232 моделируемого объекта работает с управлением от элемента 33 управления моделируемым объектом таким образом, чтобы приводной блок 132 и приводной блок 232 моделируемого объекта были взаимно сблокированными и вместе приводились в движение (S67).
С другой стороны, когда на этапе S63 выбран альтернативный вариант, в котором в качестве основного объекта используют блок 20 моделирования, на дисплейном блоке 40 отображается указание, что инструктора T по реабилитации просят приложить нагрузку блока 20 моделирования для сгибания и разгибания (S68).
Считывают положение по углу поворота, обнаруженное датчиком 231 угла поворота моделируемого объекта, вращательный момент, обнаруженный датчиком 233 вращательного момента моделируемого объекта в соединительном элементе 23, и значения напряжений, обнаруженные тензодатчиками 215 и 225 первой моделирующей рамы 21 и второй моделирующей рамы 22, и измеряют физические величины блока 20 моделирования (S69).
Затем, значения вращательного момента и напряжения и величина угла поворота, измеренные на этапе S69, выдаются в блок 32 управления в качестве внешнего усилия и величины перемещения, соответственно (S70). Затем, электродвигатель 132b приводят в движение в соответствии с приводным сигналом, выдаваемым в приводной блок 132 биометрического измерительного устройства 10 устройством 30 управления на основании выходного сигнала мышцы-сгибателя, выходного сигнала мышцы-разгибателя и результата добавления внешнего усилия, принятого от блока 20 моделирования так, что биометрическое измерительное устройство 10 сблокировано с блоком 20 моделирования (S71).
В результате человек P испытывает такое ощущение, как если бы усилие сгибания или разгибания прилагалось к коленному суставу A1 инструктором T, поскольку биометрическое измерительное устройство 10 сблокировано совместно с блоком 20 моделирования. Инструктор T может ощущать силу, которая прилагается человеком P, путем касания блока 20 моделирования, сблокированного совместно с работой человека P, чтобы двигать коленный сустав A1. Устройство 1 для поддержки реабилитации в соответствии с данным вариантом осуществления выполнено так, чтобы биометрическое измерительное устройство 10 и блок 20 моделирования были сблокированы между собой для формирования двухсторонней сервосистемы.
Затем, на этапе S72 обнаруживают, завершен ли процесс реабилитации. Когда на этапе S72 обнаружено, что процесс реабилитации не завершен, управление передается на вышеупомянутый этап S63, и повторяется процедура по этапам S63-S71. С другой стороны, когда на этапе S72 обнаружено, что процесс реабилитации завершен, управление передается на следующий этап S73, и связь между биометрическим измерительным устройством 10 и блоком 20 моделирования разъединяется (S73).
Так как устройство 1 для поддержки реабилитации выполнено с возможностью взятия корреляции между биосигналом, мышечной силой и углом поворота сустава и выходным сигналом корреляции в количественном виде, то возможно построение двухсторонней сервосистемы. Данная двухсторонняя сервосистема является системой, в которой передаются как информация о положении, так и информация об усилии. В двухсторонней системе, когда два устройства связаны между собой и совместно используют как информацию о положении, так и информацию об усилии, одно из двух устройств может работать под управлением от другого устройства, и усилие, прилагаемое к одному из двух устройств, может распознаваться на стороне другого устройства.
Если двухсторонней связью не порождается разновременность, то биометрическое измерительное устройство 10 и блок 20 моделирования можно разделять. При использовании сети, например сети Internet, устройство 1 для поддержки реабилитации может быть выполнено так, чтобы биометрическое измерительное устройство 10 и блок 20 моделирования соединялись по сети. При этом состояние физически недееспособного человека P, который находится в удаленном месте, можно проверять с помощью блока 20 моделирования.
Кроме того, устройство 1 для поддержки реабилитации в соответствии с данным вариантом осуществления можно использовать следующим образом. Например, когда мышечная сила ноги ослаблена, корреляция между мышечной силой ноги человека P и биосигналом определяется биометрическим измерительным устройством 10, содержащим приводной блок 132. И далее к выходному сигналу мышцы-сгибателя и выходному сигналу мышцы-разгибателя, соответственно, прибавляется вспомогательное значение для усиления выходной мощности двигателя приводного блока 132, чтобы можно было компенсировать мышечную силу ноги человека P. В результате недостаточная мышечная сила человека P компенсируется приводным усилием приводного блока 132, и человек P будет способен идти пешком без поддержки другого человека. Если установлена программа упражнений, при которой вспомогательное значение постепенно уменьшается по мере того, как восстанавливается мышечная сила человека P, то человеку P можно проводить реабилитацию и при одновременном ведении обычного образа жизни.
Когда мышечная сила человека P ослабляется, и диапазон подвижности сустава не велик из-за того, что перелом кости зафиксирован гипсом, то применяется биометрическое измерительное устройство 10, содержащее приводной блок 132, и учитывается вспомогательное значение, и, кроме того, учитываются величина коррекции растяжения на стороне сгибания и величина коррекции растяжения на стороне разгибания, которые выставляют величину θ поворота биометрического измерительного устройства 10 таким образом, чтобы слегка превышать диапазон подвижности сустава. При этом человек P может увеличивать диапазон подвижности сустава, при одновременной проверке ситуации в соответствии со своим намерением.
В альтернативном варианте устройство 1 для поддержки реабилитации в соответствии с данным вариантом осуществления может быть выполнено с возможностью приложения нагрузки от приводного блока 132, которая сводит на нет выходной сигнал мышцы-сгибателя и выходной сигнал мышцы-разгибателя в приводной блок 132, вместо приложения вспомогательного значения к биометрическому измерительному устройству 10. Данный подход позволяет принудительно усиливать ослабленную мышечную силу человека P.
Таким образом, устройство 1 для поддержки реабилитации в соответствии с данным вариантом осуществления может выдавать биосигнал и мышечную силу в количественном виде посредством взятия корреляции между физическими величинами в суставе, являющемся объектом измерения, и биосигналом произвольно сокращающейся мышцы в суставе. При использовании блока индикации, например дисплейного блока 40 и блока 20 моделирования, который обеспечивает визуальную и тактильную информацию с использованием корреляции, можно усилить связь между человеком P и инструктором T и ощущение мышц или сустава человека P можно легко передавать инструктору T. Даже когда человеку P трудно выразить свое ощущение в количественном виде, инструктор T может точно распознать состояние недееспособного органа человека P с помощью блока 20 моделирования, связанного с биометрическим измерительным устройством 10.
Устройство 1 для поддержки реабилитации в соответствии с данным вариантом осуществления прикрепляется к суставу человека P, который проходит реабилитацию, и измеряет биосигнал произвольно сокращающейся мышцы в суставе. Приводной блок 132 биометрического измерительного устройства 10 может выполнять работу по поддержке на основании корреляции между биосигналами и околосуставными физическими величинами. Поэтому, даже если человек P характеризуется физической недееспособностью в системе нейротрансмиссии из головного мозга вследствие поражения шейных позвонков или спинного мозга, то передаваемый по нервам сигнал, возникающий в другой части тела, когда выполняют движение в суставе, являющемся объектом реабилитации, можно использовать как запускающий сигнал произвольно сокращающейся мышцы, чтобы активизировать произвольно сокращающуюся мышцу.
Далее приведено описание случаев, в которых устройство 1 для поддержки реабилитации применяется для суставов, отличных от коленного сустава A1.
Состав устройства 1 для поддержки реабилитации в каждом из следующих вариантов осуществления является, по существу, аналогичным составу устройства 1 для поддержки реабилитации в соответствии с первым вариантом осуществления, показанным на фиг.2. В следующих вариантах осуществления элементы, которые не отличаются от соответствующих элементов на фиг.2, обозначены такими же позициями, и их описание опускается. Поскольку устройство 30 управления и блок 20 моделирования являются такими же, как в первом варианте осуществления, то их описание в последующих вариантах осуществления не приводится.
Затем, биометрическое измерительное устройство 10A устройства 1 для поддержки реабилитации в соответствии со вторым вариантом осуществления изобретения описано ниже со ссылкой на фиг.11-13.
Данное биометрическое измерительное устройство 10A выполнено с возможностью выполнения действия по разгибанию и действия по сгибанию тазобедренного сустава A2. Поэтому измерения, касающиеся средней ротации, боковой ротации, аддукции и абдукции, не допускаются.
Биометрическое измерительное устройство 10A в соответствии с данным вариантом осуществления содержит первую раму 311, вторую раму 312, соединительный блок 313, датчик 14 биосигнала на стороне сгибания и датчик 15 биосигнала на стороне разгибания, как показано на фиг.11 и 12.
Нижний конец 311a первой рамы 311 соединен с неподвижно закрепленной стороной соединительного блока 313, и верхний конец 311b первой рамы 311 продолжается к подвздошному гребню таза (первой скелетной части), продолжающемуся из тазобедренного сустава A2, и поворачивается вокруг спины. Лента 314 прикреплена к верхнему концу 311b первой рамы 311, который расположен в отдалении от тазобедренного сустава A2, и лента 314 оборачивается вокруг талии человека P. Вспомогательную ленту можно провести через промежность, чтобы исключить соскальзывание ленты 314, обернутой вокруг талии.
Вторую раму 312 располагают вдоль бедренной кости (второй скелетной части), верхний конец 321 второй рамы 312 соединен с лентой 323 и поворотной стороной соединительного блока 313, и нижний конец 322 второй рамы 312 соединен с лентой 324. Ленты 314, 323 и 324 имеют состав, который аналогичен составу лент 114, 123 и 124 в вышеописанном первом варианте осуществления.
Как показано на фиг.11 и 12, соединительный блок 313 соединяет первую раму 311 и вторую раму 312, и соединительный блок 313 располагают коаксиально с осью α поворота, относительно которой выполняются действия разгибания и сгибания в тазобедренном суставе A2. Соединительный блок 313 содержит датчик 131 угла поворота, приводной блок 132 и датчик 133 вращательного момента аналогично соединительному блоку 13 в соответствии с первым вариантом осуществления.
Как показано на фиг.12, датчик 14 биосигнала на стороне сгибания прикрепляют к поверхности тела, соответствующей подвздошно-поясничной мышце или мышце-напрягателю широкой фасции, которая, в основном, работает как произвольно сокращающаяся мышца, когда выполняется сгибание в тазобедренном суставе A2. Как показано на фиг.11, датчик 15 биосигнала на стороне разгибания прикрепляют к поверхности тела, соответствующей ягодичной седалищной мышце, которая, в основном, работает как произвольно сокращающаяся мышца, когда выполняется разгибание в тазобедренном суставе A2. Поскольку эпидерма в местах, где расположены датчик 14 биосигнала на стороне сгибания и датчик 15 биосигнала на стороне разгибания, сильно растягивается или сжимается во время действия, сигнальные провода 14a и 15a датчиков имеют подходящий допуск, допускающий перемещение.
Биометрическое измерительное устройство 10A в соответствии с данным вариантом осуществления может быть выполнено так, что рама, расположенная вдоль бедра B1, составляет одно целое с биометрическим измерительным устройством 10 для коленного сустава A1, показанным на фиг.1. В данном случае требуется дополнительно обеспечить устройство для регулировки длины, так как длина бедренной кости отличается для каждого человека P.
Когда измеряются физические величины около тазобедренного сустава A2 и биосигналы произвольно сокращающихся мышц, например подвздошно-поясничных мышц, мышц-напрягателей широкой фасции и ягодичных седалищных мышц, человек P находится в позиции стоя, как показано на фиг.13, и выполняет действие, которое поднимает и опускает бедро B1. Когда человеку P трудно стоять прямо, человек P может принять либо позицию сидя, либо позицию лежа, как на фиг.1, 6 и 7. Однако, так как состояния приложения силы тяжести к ноге различаются в зависимости от позиции, то необходимо учитывать ситуативное состояние. В данном случае в блоке 34 памяти можно хранить корреляцию между физическими величинами и биосигналами для каждой позиции.
Далее, со ссылками на фиг.14 и 15, приведено описание биометрического измерительного устройства 10B устройства 1 для поддержки реабилитации в соответствии с третьим вариантом осуществления настоящего изобретения.
Данное биометрическое измерительное устройство 10B выполнено с возможностью выполнения действия по разгибанию и действия по сгибанию локтевого сустава A3. Как показано на фиг.14 и 15, биометрическое измерительное устройство 10B содержит первую раму 411, вторую раму 412, соединительный блок 413, датчик 14 биосигнала на стороне сгибания и датчик 15 биосигнала на стороне разгибания.
Первую раму 411 располагают вдоль плечевой кости (первой скелетной части) и прикрепляют к плечевой части B3 лентами 413 и 414, которые расположены в двух местах на стороне, близкой к локтевому суставу A3, и на стороне, удаленной от локтевого сустава A3. Вторую раму 412 располагают вдоль локтевой кости или лучевой кости (2-й скелетной части) и прикрепляют к предплечью B4 лентами 423 и 424, которые расположены в двух местах на стороне, близкой к локтевому суставу A3, и на стороне, удаленной от локтевого сустава A3.
Соединительный блок 413 соединяет первую раму 411 и вторую раму 412 биометрического измерительного устройства 10B и содержит датчик 131 угла поворота, приводной блок 132 и датчик 133 вращательного момента, которые встроены в соединительный блок 413, аналогично соединительному блоку 13 биометрического измерительного устройства 10 в соответствии с первым вариантом осуществления. Соединительный блок 413 располагают так, что центр 130 поворота коаксиален оси α поворота, вокруг которой выполняется действие по разгибанию или сгибанию локтевого сустава A3. То есть биометрическое измерительное устройство 10 в соответствии с данным вариантом осуществления не оказывает поддержку действию по пронации и супинации локтевого сустава A3.
Как показано на фиг.14, датчик 14 биосигнала на стороне сгибания прикрепляют к поверхности тела, соответствующей двуглавой мышце и плечевой мышце, которые, в основном, работают как произвольно сокращающаяся мышца, когда выполняется сгибание в локтевом суставе A3. Как показано на фиг.15, датчик 15 биосигнала на стороне разгибания прикрепляют к поверхности тела, соответствующей трехглавой мышце, которая, в основном, работает как произвольно сокращающаяся мышца, когда выполняется разгибание в локтевом суставе A3. В варианте осуществления, показанном на фиг.14 и 15, датчик 14 биосигнала на стороне сгибания и датчик 15 биосигнала на стороне разгибания располагают в местах, которые находятся на расстоянии от лент 413 и 414. Поскольку датчик 14 биосигнала на стороне сгибания и датчик 15 биосигнала на стороне разгибания должны прикрепляться в положениях, в которых биосигнал легко обнаруживается, их можно располагать на внутренней окружной поверхности ленты 413, на стороне, близкой к локтевому суставу A3.
Когда физические величины около локтевого сустава A3 и биосигналы произвольно сокращающихся мышц, например двуглавой мышцы и плечевой мышцы и трехглавой мышцы, измеряют с использованием биометрического измерительного устройства 10B, человек P находится в позиции, в которой верхняя часть тела поднята, как показано на фиг.14 и 15, и сгибает или разгибает локоть. Когда человеку P трудно быть в позиции, в которой верхняя часть тела поднята, человек P может занять позицию сидя или позицию лежа. В данном случае, так как условия действия силы тяжести на предплечье B4 различаются в зависимости от позиции, то необходимо сохранять корреляцию между физическими величинами около локтевого сустава A3 и биосигналами для каждой позиции в блоке 34 памяти, аналогично второму варианту осуществления.
Далее, со ссылкой на фиг.16, приведено описание биометрического измерительного устройства 10C устройства 1 для поддержки реабилитации в соответствии с третьим вариантом осуществления изобретения.
Данное биометрическое измерительное устройство 10C выполнено с возможностью выполнения действия по сгибанию (ладонной флексии) и действия по разгибанию (тыльному сгибанию) лучезапястного сустава A4. Биометрическое измерительное устройство 10 содержит первую раму 511, вторую раму 512, соединительный блок 513, датчик 14 биосигнала на стороне сгибания и датчик 15 биосигнала на стороне разгибания.
Как показано на фиг.16, первую раму 511 располагают вдоль локтевой кости (первой скелетной части) и прикрепляют к предплечью B4 лентами 513 и 514, которые располагают в двух местах на стороне вблизи лучезапястного сустава A4 и на стороне вблизи локтевого сустава A3. Вторую раму 512 располагают вдоль плюсневой кости (второй скелетной части) на стороне локтевой кости и закрепляют к ладони B5 лентой 524, которая закреплена на второй раме 512, на стороне, удаленной от лучезапястного сустава A4, и обернута вокруг концевой стороны со второй по пятую плюсневых костей.
Соединительный блок 513 располагают коаксиально с осью α поворота, которая предположительно проходит через лучезапястный сустав A4 со стороны лучевой кости к стороне локтевой кости, как показано на фиг.16. Соединительный блок 513 содержит датчик 131 угла поворота, приводной блок 132 и датчик 133 вращательного момента, которые встроены в соединительный блок 513, аналогично ранее описанным вариантам осуществления. Так как электродвигатель 132b расположен вдоль первой рамы 511, то приводной блок 132 отличается по внешнему виду, но функция приводного блока 132 аналогична функции приводного блока в соответствии другими вариантами осуществления.
Датчик 14 биосигнала на стороне сгибания прикрепляют к поверхности тела, соответствующей любой из мышц поверхностного сгибателя пальцев, глубокого сгибателя пальцев кисти, локтевого сгибателя запястья, длинного сгибателя большого пальца кисти, лучевого сгибателя запястья и т.п., которые, в основном, работают, когда выполняется сгибание в лучезапястном суставе A4. Датчик 15 биосигнала на стороне разгибания прикрепляют к поверхности тела, соответствующей любой из мышц разгибателя пальцев, длинного лучевого разгибателя запястья, короткого лучевого разгибателя запястья и т.п., которые, в основном, работают, когда выполняется разгибание в лучезапястном суставе A4.
Как очевидно из конструкции, показанной на фиг.16, данное биометрическое измерительное устройство 10C можно также использовать для измерения физических величин смещений лучезапястного сустава A4 на стороне сгибания и стороне разгибания и биосигналов. Когда измеряют физические величины смещений на стороне сгибания и стороне разгибания и биосигналы, биометрическое измерительное устройство 10C прикрепляют так, чтобы соединительный блок 513 располагался на обратной стороне руки. Центр 530 поворота соединительного блока 513 располагают коаксиально с осью β лучезапястного сустава, который предположительно проходит через головчатую кость в направлении со стороны ладони к тыльной стороне.
Позицию предплечья B4, при измерении биосигнала, можно устанавливать в любом направлении. Однако, когда текущий результат измерений сравнивают с предыдущим результатом измерений в процессе реабилитации, предплечье B4 удерживают в той же позиции, или корреляцию между физическими величинами лучезапястного сустава и биосигналами сохраняют для каждой позиции.
Как изложено выше, биометрическое измерительное устройство 10, содержащее раму, адаптируемую к суставу живого организма и скелетной части, продолжающейся от сустава, можно выполнить не только в соответствии с суставами в первом-четвертом вариантах осуществления, но также в соответствии с другими суставами. Например, биометрическое измерительное устройство 10 можно выполнить в соответствии с любым из: голеностопного сустава, плеча и суставов пальца. Когда устройство применяют для суставов пальца, то для уменьшения размера приводного блока 132 можно применить плунжерный исполнительный механизм, в котором объединены провода и электромагнит, пневмогидравлический исполнительный механизм, ультразвуковой двигатель и т.п.
В первом варианте осуществления показаны дисплейный блок 40 и блок 20 моделирования в качестве блока индикации, который обеспечивает визуальную и тактильную информацию. Однако блок индикации может быть выполнен с возможностью вывода физических величин сустава и биосигналов произвольно сокращающейся мышцы, измеренных биометрическим измерительным устройством 10, в количественной форме. Например, блок индикации может быть выполнен с возможностью обеспечения аудиоинформации, которая распознается в зависимости от частоты или амплитуды звука.
В вышеописанных вариантах осуществления показаны биометрические измерительные устройства 10, 10A-10C, каждое из которых применяют для одного сустава. Однако, как видно из фиг.1, биометрическое измерительное устройство 10 может быть выполнено с возможностью измерения тазобедренного сустава A2 и коленного сустава A1 одновременно. В качестве альтернативы, биометрические измерительные устройства 10, 10A-10C могут быть выполнены в подходящей комбинации. В качестве альтернативы, биометрическое измерительное устройство 10 может быть выполнено с возможностью измерения правой ноги и левой ноги одновременно. В качестве альтернативы, биометрическое измерительное устройство 10 может быть выполнено с возможностью измерения верхней конечности и нижней конечности одновременно.
В ранее описанных вариантах осуществления первые рамы 11, 311, 411, 511 и вторые рамы 12, 312, 412, 512 располагают по поверхности тела человека P. Достаточным условием является расположение центра 130 поворота соединительного блока 13 коаксиально с осью α поворота сустава, являющегося объектом измерения. Поэтому первую раму 11 и вторую раму 12 можно располагать вдоль первой скелетной части и второй скелетной части так, чтобы они продолжались от соединительного блока 13 к передней стороне тела или задней стороне тела, чтобы обеспечить удобное приложение веса тела человека P к соединительному блоку 13.
Величина коррекции на стороне сгибания и величина коррекции на стороне разгибания могут быть коэффициентами для определения корреляции между биосигналом, когда возбуждены мышца-сгибатель и мышца-разгибатель, и соответствующей мышечной силой. Величину коррекции на стороне сгибания и величину коррекции на стороне разгибания можно представлять постоянным значением или многочленом.
Настоящая международная заявка основана на и испрашивает приоритет по японской патентной заявке № 2007-075632, поданной 22 марта 2007 г., и японской патентной заявке № 2008-056674, поданной 6 марта 2008 г., содержание которых в полном объеме включено в настоящее описание посредством ссылки.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Хотя устройство для поддержки реабилитации согласно варианту осуществления применялось к суставу человеческого тела, оно применимо также к суставу животного, имеющего внутренний скелет, как в живом организме.
Реферат
Изобретение относится к медицинской технике. Устройство содержит первую раму, расположенную вдоль первой скелетной части, продолжающейся из сустава, вторую раму, расположенную вдоль второй скелетной части, продолжающейся из сустава в направлении, отличающемся от направления первой скелетной части, датчик угла поворота, выполненный с возможностью обнаружения положения по углу поворота между первой рамой и второй рамой, датчик биосигнала на стороне сгибания, выполненный с возможностью обнаружения биосигнала мышцы-сгибателя, датчик биосигнала на стороне разгибания, выполненный с возможностью обнаружения биосигнала мышцы-разгибателя, блок калибровки, выполненный с возможностью определения величины коррекции на стороне сгибания и величины коррекции на стороне разгибания по отдельности, и блок памяти, выполненный с возможностью сохранения индивидуальных величин коррекции биосигналов, разных для отдельных лиц, величины коррекции на стороне сгибания и величины коррекции на стороне разгибания. Применение данного устройства позволит повысить эффективность реабилитации, за счет корреляции между физической величиной около сустава и биосигналом мышцы около сустава. 11 з.п.ф-лы, 16 ил.
Комментарии