Способ оценки степени реабилитации с использованием активного экзоскелета у пациентов с нарушениями опорно-двигательного аппарата - RU2695605C2
Код документа: RU2695605C2
Чертежи



Описание
[0001] Заявляемое изобретение относится к медицине, в частности к способам оценки результатов проведенных лечебных мероприятий на этапах медицинской реабилитации пациентов с нарушениями опорно-двигательного аппарата, и может быть использовано для объективной оценки эффективности проведенного курса лечебных мероприятий, разработки стратегии и плана корригирующей терапии при назначении повторных циклов реабилитационных мероприятий.
[0002] Известен способ оценки эффективности комплексной реабилитации лиц с инвалидностью путем измерения и суммирования показателей в начале и конце курса реабилитации (RU, 2492805, А61В 5/00, 2012), заключающийся в том, что учитывают три блока показателей, характеризующих состояние функций организма по 5 параметрам: когнитивные функции, тонус и сила мышц, выраженность боли, выделительные функции; активность по 5 параметрам: возможности кисти, физические возможности, мобильность, уровень самообслуживания, продуктивность в домашних условиях; участие по 4 параметрам: коммуникативные навыки, досуг, социализация, профессиональная пригодность.
[0003] Также дополнительно оценивают выраженность ограничений жизнедеятельности (ВОЖ), который рассчитывают по формуле ВОЖ=100-(РП1/МРП⋅100) (%), где РП1 - сумма баллов по результатам измерений до реабилитации, МРП - максимальный реабилитационный потенциал, максимальное количество баллов при оценке функций, активности и участия, и при значении коэффициента ВОЖ 10-24% определяют незначительную степень выраженности ограничений жизнедеятельности, при значении ВОЖ 25-49% - умеренно выраженную, при значении ВОЖ 50-74% - выраженную, при значении ВОЖ 75-100% - значительно выраженную.
[0004] Затем определяют эффективность реабилитации, которую рассчитывают по формуле ЭР=(РП2-РП1)/МРП⋅100(%), где РП1 - сумма баллов до реабилитации, РП2 - сумма баллов после реабилитации, МРП - максимальный реабилитационный потенциал, максимальное количество баллов при оценке функций, активности и участия.
[0005] Далее полученный результат оценивают в процентах с учетом коэффициента ВОЖ, где при значении ВОЖ 10-24% эффективность реабилитации 15-25% определяют как очень хорошую, 10-14% - хорошую, 5-9% - удовлетворительную, 0-4% - без динамики; при значении ВОЖ 25-49% эффективность реабилитации 25-50% оценивают как очень хорошую, 15-24% - хорошую, 5-14% - удовлетворительную, 0-4% - без динамики; при значении ВОЖ 50-74% эффективность реабилитации 20-35% оценивают как очень хорошую, 10-19% - хорошую, 5-9% удовлетворительную, 0-4% - без динамики; при значении ВОЖ 75-100% эффективность реабилитации 10-15% оценивают как очень хорошую, 5-9% - хорошую, 1-4% - удовлетворительную, 0-0,09% - без динамики.
[0006] Известен способ оценки функционального состояния больных с патологией суставов нижних конечностей в процессе реабилитации путем исследования клинико-функциональньгх признаков до и после лечения (RU, 2233619, А61В 5/11, 2003), в соответствии с которым исследование проводят путем измерения следующих признаков: максимального числа раз, которое пациент может подняться с высокого стула; наименьшей высоты стула, с которого пациент может встать или на который может присесть; высоты ступени, на которую может встать больной, для каждой ноги отдельно; время стояния на ноге, в секундах, для каждой ноги отдельно.
[0010] После этого сопоставляют исходное значение каждого признака со степенью его прироста в процентах, при этом первый признак получает 1 балл при приросте значения этого признака на 50% - при исходном значении до 20 раз, на 25% - при исходном значении от 20 до 40 раз и любом приросте - при исходном значении более 40 раз. Второй и третий признаки получают один или более баллов при переходе от одной высоты опоры к другой. Четвертый признак соответственно получает один балл при приросте на 50% - при исходном его значении до 30 с, на 25% - при исходном значении от 30 до 60 с и любом приросте - при исходном значении более 60 с.
[0011] Далее суммируют количество полученных баллов и, если количество баллов равно 1 динамику состояния пациента оценивают как «незначительное улучшение», при сумме баллов 2-4 динамику состояния больного оценивают как «улучшение», а при сумме баллов 5-6 делают вывод о значительном улучшении функционального состояния пациента.
[0012] Известные способы оценки степени реабилитации не обладают достаточной точностью и информативностью. Кроме того, они не пригодны для оценки реабилитации пациентов с частичной или полной потерей функций опорно-двигательного аппарата при использовании в качестве средства реабилитации аппаратов помощи движению, в частности активных экзоскелетов.
[0013] Применение активных экзоскелетов, прогресс в разработке и производстве которых в последнее время отмечается в технологически передовых странах, позволяет проводить реабилитацию пациентов с нарушениями опорно-двигательного аппарата в условиях максимально приближенных к естественным движениям, в частности походке, человека. При этом возникает необходимость разработки новых, пригодных для этого случая, инструментальных способов оценки степени реабилитации по физическим показателям, дающим объективную картину о процессе восстановления здоровья пациента.
[0014] Технический результат предлагаемого изобретения заключается в расширении арсенала технических средств способов оценки степени реабилитации пациентов с нарушениями опорно-двигательного аппарата. Кроме того, техническим результатом также является получение достоверных данных о ходе реабилитации и повышение точности оценки.
[0015] Указанный технический результат достигается за счет того, что способ оценки степени реабилитации с использованием активного экзоскелета у пациентов с нарушениями опорно-двигательного аппарата, осуществляют следующим образом.
[0016] Между ступнями пациента и опорами ступни активного экзоскелета размещают датчики, измеряющие давление или усилие, по крайней мере, в пяточной и плюснефаланговой части стопы. Осуществляют первую запись сигналов датчиков для каждой ноги при движении пациента в активном экзоскелете в течение заданного времени или заданного количества шагов в начале цикла реабилитации при заданном паттерне ходьбы.
[0017] Как будет показано далее, перед проведением курса реабилитации пациента необходимо обучить пользованию активным экзоскелетом до степени управления или полностью самостоятельного, или с внешней помощью в зависимости от его клинического состояния. Естественно, степень обучения у каждого пациента будет своя.
[0018] Исходя из этого, а также учитывая выбранный паттерн движения активного экзоскелета, лечащий врач выбирает необходимое количество двойных шагов или время, достаточные для записи исследуемых параметров. Минимально необходимым для получения реальной картины состояния процесса реабилитации является выполнение 10-ти двойных шагов.
[0019] В конце цикла реабилитации или через заданное количество сеансов реабилитации при заданном паттерне ходьбы осуществляют вторую запись сигналов датчиков при движении пациента в активном экзоскелете в течение заданного времени или заданного количества шагов.
[0020] В зависимости от диагноза заболевания, физического состояния пациента, различных социально-экономических причин длительность цикла реабилитации может сильно различаться в каждом конкретном случае. Обычно реабилитация с использованием активного экзоскелета занимает две - три недели или, соответственно, 10-15 сеансов. Однако, при длительном цикле реабилитации, например, в течение 2-х месяцев, лечащему врачу необходимо получать объективную информацию о ее течении. Поэтому оценка может быть проведена, например, через каждые три недели курса.
[0021] Далее, на основании записанных данных определяют первые и вторые временные характеристики локомоторного цикла и сравнивают эти характеристики между собой и с временными характеристиками, полученными для здорового человека на данном типе активного экзоскелета при заданном паттерне ходьбы.
[0022]

[0023] На основании записанных данных для каждой ноги определяют первую и вторую усредненные характеристики локомоторного цикла как функцию вертикальной составляющей опорной реакции по времени или функцию отношения вертикальной составляющей опорной реакции к весу пациента по времени на фазе опоры.
[0024] Кроме того, на основании записанных данных для каждой ноги определяют первое и второе распределение давления под стопой в середине фазы опоры.
[0025] В качестве индикаторов оценки степени реабилитации принимают:
- изменение

- увеличение амплитуды усредненного отношения вертикальной составляющей опорной реакции к весу пациента или усредненной вертикальной составляющей опорной реакции для обеих ног,
- выравнивание амплитуд усредненного отношения вертикальной составляющей опорной реакции к весу пациента или усредненной вертикальной составляющей опорной реакции обеих ног,
- выявление у вторых усредненных характеристик обеих ног трех выраженных экстремумов, соответствующих переднему толчку, заднему толчку и срединному минимуму,
- увеличение пятна контакта в латеральной и плюснефаланговой частях у второго распределения давления по сравнению с первым.
[0026] Реабилитацию оценивают как удовлетворительную при наличии (выявлении) одного - двух индикаторов, реабилитацию оценивают как хорошую при наличии трех - четырех индикаторов, реабилитацию оценивают как отличную при наличии более четырех индикаторов.
[0027] Как будет показано далее, наиболее предпочтительной является такая реализация способа, при которой в качестве датчиков давления или усилия применяют измерительные стельки. Однако, в общем случае, пусть и при снижении точности и надежности измерений, достаточно наличия одного - двух датчиков давления или усилия, располагаемых в каждой пяточной и плюснефаланговой частях ступни.
[0028] Вышеизложенное представляет собой краткое изложение сущности изобретения и, таким образом, может содержать упрощения, обобщения, включения и/или исключения подробностей; следовательно, специалистам в данной области техники следует принять во внимание, что данное краткое изложение сущности изобретения является только иллюстративным и не подразумевает какое-либо ограничение.
[0029] Для лучшего понимания сути предлагаемого решения ниже приводится описание конкретного примера выполнения, не являющееся ограничительным примером практической реализации способа оценки степени реабилитации в соответствии с заявляемым изобретением со ссылками на рисунки, на которых представлено следующее.
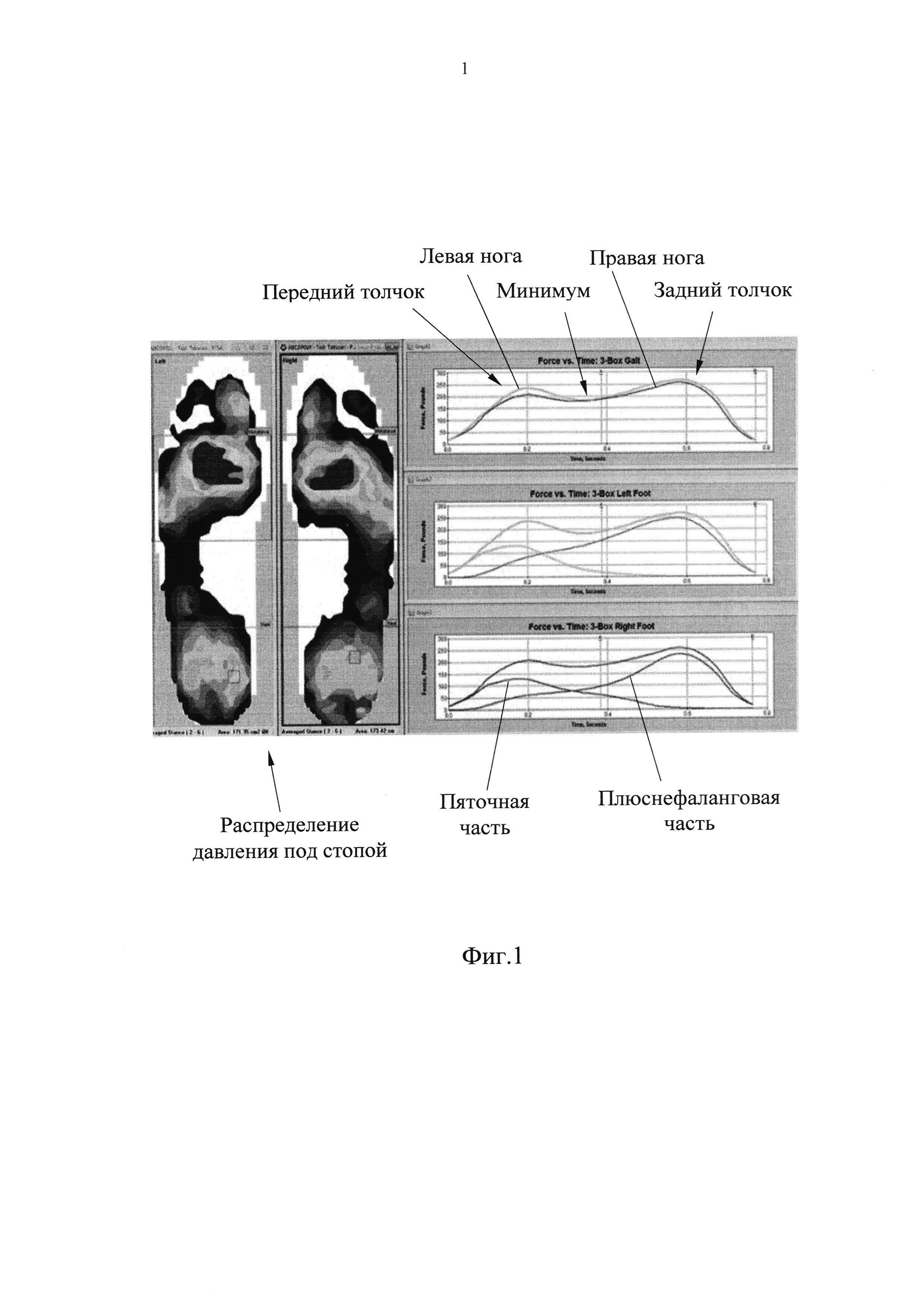
[0030] На фиг. 1 изображены динамические характеристики и распределение давления под стопой у здорового человека.
[0031] На фиг. 2 изображены динамические характеристики и распределение давления под стопой у пациента до и после реабилитации.
[0032] На фиг. 3 изображены распределение давления под стопой у пациента до и после реабилитации и двугорбая форма кривой усредненного отношения вертикальной составляющей опорной реакции к весу тела пациента.
[0033] На фиг. 4 изображены графики отношения вертикальной составляющей опорной реакции к весу тела, имеющие несколько минимумов, у пациентов в начале курса реабилитации.
[0034] На фиг. 5 изображены графики усредненного отношения вертикальной составляющей опорной реакции к весу тела пациента после реабилитации.
[0035] При реабилитации пациентов с нарушениями опорно-двигательного аппарата с использованием активного экзоскелета ходьба происходит в одетом на пациента экзоскелете, который состоит из тазового, двух бедренных, двух звеньев голени и двух стоп, а также двух голеностопных шарниров, обеспечивающих вращение стоп также в сагиттальной плоскости.
[0036] Движения звеньев в экзоскелете выполняются в сагиттальной плоскости. Экзоскелет оснащен приводами в бедренных и коленных шарнирах, обеспечивающих относительное движение соответствующих звеньев. В состав экзоскелета входят датчики, определяющие межзвенные углы бедренных и голенных шарниров, а также датчики определения силы реакции опоры, расположенные в стельках стоп. Сбор и обработка информации с этих датчиков осуществляется вычислительной системой, передающей информацию по беспроводному каналу на исследовательский компьютер. Экзоскелет к пациенту крепится посредством лямок, удерживающих непосредственно торс пациента, помещенный в медицинский корсет в случае необходимости. Бедра и голени также удерживаются за счет лямок.
[0037] При использовании экзоскелета в процессе ходьбы он воздействует на пациента в различных точках тела, перемещая переносимую ногу по заданной программной траектории в соответствии с выбранным паттерном. В целом человек и интегрированный с ним экзоскелет представляют собой человеко-машинную систему. Взаимодействие человека и экзоскелета осуществляется посредством сил, возникающих в местах крепления человека с экзоскелетом (лямках и ботинках).
[0038] Измерить силы в лямках пока не представляется возможным. Однако степень нагрузки стоп пациента может быть измерена с помощью датчиков силы под стопой оператора. Так, если антропометрические параметры человека и экзоскелета соответствуют друг другу в состоянии покоя вертикальная сила реакции в стопах оператора определяется силой веса самого человека. При этом часть веса приходится на костыли. Поэтому для оценки степени нагрузки стоп пациента в экзоскелете при ходьбе по ровной горизонтальной поверхности были применены гибкие датчики силы фирмы Tekscan. Эти датчики должны находиться в ботинке между стопой человека и опорной площадкой экзоскелета.
[0039] Применение стелек позволяет исследовать следующие биомеханические параметры ходьбы: основные (скорость, темп, длину двойного шага, длительность локомоторного цикла), временные (длительность опорной, переносной и двуопорной фаз, коэффициент ритмичности), динамические параметры (вертикальную составляющую RZ главного вектора опорной реакции) и распределение давление под стопой.
[0040] Преимуществом применения стелек по сравнению с традиционной динамометрией является возможность регистрировать вертикальную составляющую RZ опорной реакции в каждом шаге, что позволяет получить данные по множеству шагов. Исследование большого количества опорных реакций позволяет провести детальную обработку результатов и получить коэффициент вариативности - необходимый параметр для оценки степени освоения экзоскелетом, проанализировать изменения устойчивости и опороспособности по мере адаптации пациента к ходьбе в экзоскелете, проследить уменьшение времени опоры на костыли.
[0041] Измерительная система силового взаимодействия позволяет получать динамические данные в реальном времени в виде цветного рисунка (фиг. 1), который характеризует уровень силовой нагрузки на различных участках стоп обеих ног (рисунок слева). Измерения выполняются с высокой частотой опроса датчиков (до 6000 Гц). Сенсорная система допускает калибровку в различных режимах (в положении покоя и при ходьбе). Она позволяет также отображать результаты измерений на графиках (фиг. 1 справа) или в виде полученных массивов числовых данных.
[0042] На фиг. 1 показаны динамические характеристики и распределение давления под стопой у здорового человека. Отчетливо видна двугорбая форма вертикальной составляющей опорной реакции RZ с ярко выраженными экстремумами, соответствующими переднему толчку, срединному минимуму и заднему толчку.
[0043] На фиг. 2 показаны динамические характеристики и распределение давления под стопой у пациента до и после реабилитации. Видно, что вертикальная составляющая RZ опорной реакции (по отношению к весу тела) до реабилитации имеет ярко выраженную трапецеидальную форму. При этом амплитуда вертикальной составляющей RZ опорной реакции левой ноги существенно меньше амплитуды вертикальной составляющей RZ опорной реакции правой ноги. Распределение давления под стопой пациента, измеренное в середине фазы опоры, до реабилитации показывает, что опора пациента осуществляется в основном на пятку.
[0044] После проведения курса реабилитации амплитуда вертикальной составляющей RZ опорной реакции левой ноги значительно увеличилась и практически сравнялась с амплитудой правой ноги, хотя форма практически не изменилась. Распределение давления под стопой пациента при этом показывает, что у пациента появилась опора на латеральную часть ступни.
[0045] На фиг. 3 показано распределение давления под стопой у пациента до и после реабилитации. Видно, что после реабилитации пятно контакта распределение давления под стопой увеличилось в плюснефаланговой области ступни. Также показана двугорбая форма кривой усредненной вертикальной составляющей RZ опорной реакции (по отношению к весу тела пациента) полученная после курса реабилитации.
[0046] На фиг. 4 показаны графики вертикальной составляющей RZ опорной реакции (по отношению к весу тела пациента), имеющие несколько минимумов, у пациентов в начале курса реабилитации. После проведения курса реабилитации, как показано на фиг. 5 графики усредненной вертикальной составляющей RZ опорной реакции (по отношению к весу тела пациента) приобрели выраженную двугорбую форму с экстремумами, соответствующими переднему толчку, срединному минимуму и заднему толчку.
[0047] Пример. Исследования были проведены на 5 здоровых испытуемых и на 5 больных с последствиями позвоночно-спинномозговой травмы при ходьбе в экзоскелете «ExoAtlet». Исследования здоровых испытуемых и больных были проведены только после обучения ходьбе в экзоскелете в течение нескольких дней.
[0048] Исследования показали, что при ходьбе в экзоскелете у здоровых испытуемых длительность локомоторного цикла составляет 3 с, длина двойного шага - 0,66 м, темп - 40 шаг/мин, а средняя скорость ходьбы - 0,22 м/с. При этом длительность опорной фазы на левой ноге составляет 71,0%, а длительность переносной фазы - 29,0%; на правой ноге это соотношение составляет соответственно 69,3% и 30,7%. Таким образом, имеет место определенная асимметрия временных параметров ходьбы даже при ходьбе здоровых испытуемых в экзоскелете. Более сохранной является та нижняя конечность, у которой длительность переносной фазы меньше, т.е. левая нога. Но в наибольшей степени асимметрия проявляется в длительности двуопорной фазы. На левой ноге длительность двуопорной фазы составляет 18% локомоторного цикла, а на правой - 22,3%.
[0049] Необходимо отметить, что при ходьбе в экзоскелете используются костыли, и перенос костылей и опора на них требует дополнительного времени, особенно в начале обучения. Увеличение продолжительности двуопорной фазы связано с более длительной перестановкой костылей и опорой на них именно в эту фазу шага. При ходьбе здоровых испытуемых в экзоскелете возможно выделить фазу опоры на передний отдел стопы. Длительность этой фазы составляет на левой ноге 9,6% локомоторного цикла, а на правой ноге - 10,4% цикла.
[0050] Наличие фазы опоры на носок дает возможность вычислить другой очень важный временной параметр ходьбы - интервал τ. Этот интервал определяется временем между отрывом пятки одной ноги от опорной поверхности и моментом наступания другой ноги на опору. Интервал τ даже у здоровых испытуемых при ходьбе в экзоскелете принимает отрицательное значение, а именно -12,7% на левой ноге и -7,6% на правой ноге. Отрицательное значение интервала τ означает, что отрыв пятки происходит только тогда, когда другая нога уже устойчиво стоит на опоре.
[0051] Наибольший интерес представляет трансформация динамических параметров ходьбы, а именно вертикальной составляющей RZ опорной реакции. При ходьбе здоровых испытуемых в экзоскелете вертикальная составляющая опорной реакции сохраняет традиционную двугорбую форму. Однако передний толчок реализуется на уровне 15% цикла, затем возникает продолжительный переход к минимуму, его экстремальное значение приходится на 39% локомоторного цикла, и затем очень короткая фаза заднего толчка, который реализуется на уровне 50% цикла. Экстремальные значения вертикальной составляющей не доходят до уровня веса тела, величина переднего и заднего толчков примерно одинакова и составляет 94%, а минимума - 84%.
[0052] Характерной особенностью при ходьбе здоровых обученных людей в экзоскелете является тот факт, что, как и при ходьбе без экзоскелета, минимум кривой RZ соответствует моменту, когда переносимая нижняя конечность находится напротив опорной, а общий центр масс (ОЦМ) занимает наивысшее положение. При этом минимум вертикальной составляющей одной ноги возникает в одноопорную фазу, т.е. во время переносной фазы контралатеральной ноги.
[0053] Исследования реабилитации у 5 пациентов с последствиями позвоночно-спинномозговой травмы показывают, что длительность локомоторного цикла при ходьбе в экзоскелете у этой группы пациентов не меняется по сравнению с нормой и также равна 3 с, однако длина шага снижается на 15% (0,56 м), а скорость ходьбы - на 14% с нормой. В то же время на обеих ногах достоверно возрастает длительность опорной фазы, на левой ноге на 12% (79,4%), на правой ноге на 17% (80,9%).
[0054] Длительность переносной фазы при ходьбе в экзоскелете, напротив, достоверно снижена по сравнению с нормой: на левой ноге на 29% (20,6%), на правой ноге на 38% (19,1%). Также характерно достоверное увеличение продолжительности двуопорной фазы, особенно на левой ноге - на 68% (30,2%) и на 35% - на правой ноге (30,1%). У больных с последствиями позвоночно-спинномозговой травмы до начала тренировки не удается выделить фазу опоры на носок, а, следовательно, и интервал τ.
[0055] До курса реабилитации в экзоскелете кривая вертикальной составляющей RZ опорной реакции у больных с последствиями позвоночно-спинномозговой травмы имеет трапециевидную форму, однако отмечается резкий сдвиг всех экстремальных значений вправо по временной оси. Судя по осредненным данным, первая вершина RZ кривой - передний толчок - резко затянут и проецируется на ось абсцисс в области t=34% цикла, минимум - в области t=59%, задний толчок - в области t=69%. Все экстремальные значения RZ кривой резко снижены по сравнению с соответствующими значениями при ходьбе здоровых людей в экзсоскелете. По сравнению со здоровыми испытуемыми величина переднего толчка снижена на левой ноге на 47% (49,6%), минимума - на 65% (29,7), а заднего толчка - на 45% (51,6%). На правой ноге снижение этих параметров составляет соответственно 19% (76,2%), 52% (40,6%) и 22% (73,4). Таким образом, у больных с последствиями позвоночно-спинномозговой травмой при ходьбе в экзоскелете наблюдается четкая асимметрия динамических параметров.
[0056] Полученные данные позволяют сделать вывод о том, что у больных с последствиями позвоночно-спинномозговой травмы при ходьбе в экзоскелете отмечается отчетливое изменение ее основных, временных и динамических параметров по сравнению с соответствующими параметрами ходьбы здоровых испытуемых, проявляющееся в уменьшении длины двойного шага, средней скорости передвижения, трансформации временной структуры шага - увеличении длительности опорной и двуопорной фаз и уменьшении длительности переносной фазы, отсутствии интервала τ, изменении формы RZ кривой, в резком снижении величины экстремальных значений вертикальной составляющей опорной реакции и их перемещении вправо по временной оси.
[0057] После курса тренировки ходьбы в экзоскелете отмечаются незначительные изменения временной структуры шага. На левой ноге отмечается некоторое уменьшение длительности переносной фазы, но и оно является недостоверным. Таким образом, временная структура ходьбы у больных с последствиями позвоночно-спинномозговой травмы остается весьма стабильной и мало изменяется даже после курса комплексной реабилитации, включающей тренировку ходьбы в экзоскелете в сочетании с ЭС спинного мозга.
[0058] После 10-дневного курса тренировки ходьбы в экзоскелете наблюдается изменение формы вертикальной составляющей опорной реакции на обеих ногах. Вертикальная составляющая приобретает отчетливую двугорбую форму с четко выраженными максимумами. При этом практически исчезает динамическая асимметрия, т.е. величина экстремальных значений становится примерно одинаковой на обеих ногах. Отмечается резкое увеличение всех экстремальных значений опорных реакций, величина переднего и заднего толчков на обеих ногах превышает уровень веса тела. На левой ноге величина переднего толчка возрастает примерно в 2,5 раза (121,4%), минимума - в 2,6 раза (77,9%), заднего толчка - в 2,1 раза (109,8%). На правой ноге прирост составляет 64% (125,2%) - для переднего толчка, 107% (83,9%) - для минимума и 58% (116,2%) - для заднего толчка. Можно полагать, что увеличение опороспособности более слабой нижней конечности способствует повышению толчковой функции менее пораженной.
[0059] Полученные результаты указывают на высокую эффективность реабилитации. Основной эффект курса реабилитации состоит в значительном улучшении динамических параметров ходьбы, а именно в изменении формы RZ кривой, т.е. появление двугорбой кривой вместо трапециевидной, сдвиге всех экстремальных значений влево по временной оси, значительном повышении величины переднего и заднего толчков на обеих ногах, уменьшении времени опоры на костыли. Тот факт, что величина переднего и заднего толчков превышает уровень веса тела свидетельствует о высокой степени овладении экзоскелетом, о повышении опорной и толчковой функций нижних конечностей.
Реферат
Изобретение относится к медицине, а именно к реабилитологии, и может быть использовано при оценке степени реабилитации с использованием активного экзоскелета у пациентов с нарушениями опорно-двигательного аппарата. Для этого между ступнями пациента и опорами ступни активного экзоскелета размещают датчики, измеряющие давление или усилие, по крайней мере, в пяточной и плюснефаланговой части стопы. Осуществляют первую запись сигналов датчиков для каждой ноги при движении пациента в активном экзоскелете в течение заданного времени или заданного количества шагов в начале цикла реабилитации при заданном паттерне ходьбы. Осуществляют вторую запись сигналов датчиков при движении пациента в активном экзоскелете в течение заданного времени или заданного количества шагов в конце цикла реабилитации или через заданное количество сеансов реабилитации при заданном паттерне ходьбы. На основании записанных данных определяют первые и вторые временные характеристики локомоторного цикла и сравнивают эти характеристики между собой и с временными характеристиками, полученными для здорового человека на данном типе активного экзоскелета при заданном паттерне ходьбы. На основании записанных данных для каждой ноги определяют первую и вторую усредненные характеристики локомоторного цикла как функцию вертикальной составляющей опорной реакции по времени или функцию отношения вертикальной составляющей опорной реакции к весу пациента по времени на фазе опоры. Определяют первое и второе распределение давления под стопой в середине фазы опоры для каждой ноги. При этом в качестве индикаторов оценки принимают: изменение временных характеристик локомоторного цикла в сторону временных характеристик для здорового человека; увеличение амплитуды усредненного отношения вертикальной составляющей опорной реакции к весу пациента или усредненной вертикальной составляющей опорной реакции для обеих ног; выравнивание амплитуд усредненного отношения вертикальной составляющей опорной реакции к весу пациента или усредненной вертикальной составляющей опорной реакции обеих ног; выявление у вторых усредненных характеристик обеих ног трех выраженных экстремумов, соответствующих переднему толчку, заднему толчку и срединному минимуму; увеличение пятна контакта в латеральной и плюснефаланговой частях у второго распределения давления по сравнению с первым. Реабилитацию оценивают как удовлетворительную при наличии одного-двух индикаторов, как хорошую - при наличии трех-четырех индикаторов, как отличную - при наличии более четырех индикаторов. Способ обеспечивает эффективную реабилитацию за счет значительного улучшения динамических параметров ходьбы, а именно при сдвиге всех экстремальных значений влево по временной оси, повышении величины переднего и заднего толчков на обеих ногах, уменьшении времени опоры на костыли, что свидетельствует о высокой степени овладения экзоскелетом. 1 з.п. ф-лы, 5 ил., 1 пр.

Комментарии