Система и способ оценки силы дыхания в реальном времени и контроллер замкнутого контура - RU2641516C2
Код документа: RU2641516C2
Чертежи
Описание
В области здравоохранения механическими аппаратами искусственной вентиляции легких могут быть любые механизмы, спроектированные для того, чтобы перемещать вдыхаемый и выдыхаемый воздух в и из легких, тем самым обеспечивая механизм дыхания пациенту, который физически неспособен дышать или его дыхание недостаточно. Аппараты искусственной вентиляции легких в первую очередь используются в реаниматологии, домашнем уходе, экстренной медицинской помощи (например, автономные блоки) и анестезии (например, компонент аппарата наркоза).
В любой день на аппаратах искусственной вентиляции легких могут находиться 35,000 пациентов в США и 100,000 пациентов по всему миру. Почти все эти пациенты умерли бы, если бы не существовало аппаратов искусственной вентиляции легких. Примерно 7-10% из этих пациентов, подключенных к аппаратам искусственной вентиляции легких, будут испытывать трудности от систем искусственной вентиляции легких из-за ошибок в параметрах системы и неточностей в оценке функционирования легких пациента. Соответственно, перед медицинским персоналом стоит сложная задача выбирать подходящие значения различных параметров аппарата искусственной вентиляции легких для того, чтобы обеспечить эффективную искусственную вентиляцию для конкретного пациента в конкретный период времени. Параметры на аппарате искусственной вентиляции легких могут относиться к значениям дыхательного объема, частоты дыхательных движений, показаниям давления и т.д.
Рассматриваемый в качестве примера вариант осуществления направлен на способ извлечения эталонного значения дыхания, оценки значения дыхания испытуемого посредством аппарата искусственной вентиляции легких, определения разницы между эталонным значением дыхания и значением дыхания испытуемого и генерации значения для настройки параметров аппарата искусственной вентиляции легких на основе определенной разницы.
Следующий рассматриваемый в качестве примера вариант осуществления направлен на систему, имеющую извлекающий данные компонент для извлечения эталонного значения дыхания и обрабатывающий компонент, выполненный с возможностью оценки значения дыхания испытуемого посредством аппарата искусственной вентиляции легких, определения разницы между эталонным значением дыхания и значением дыхания испытуемого и генерации значения для настройки параметров аппарата искусственной вентиляции легких на основе определенной разницы.
Следующий рассматриваемый в качестве примера вариант осуществления направлен на машиночитаемый энергонезависимый носитель, включающий в себя набор инструкций, которые выполняются процессором. Набор инструкций выполняется с возможностью, по меньшей мере, извлекать эталонное значение дыхания, оценивать значение дыхания испытуемого посредством аппарата искусственной вентиляции легких, определять разницы между эталонным значением дыхания и значением дыхания испытуемого и генерировать значения для настройки параметров аппарата искусственной вентиляции легких на основе определенной разницы.
ФИГ. 1 показывает рассматриваемую в качестве примера замкнутую систему для оценки дыхательного усилия пациента, подключенного к аппарату искусственной вентиляции легких, и предоставления соответствующих значений параметров в соответствии с рассматриваемым в качестве примера вариантом осуществления, описанным в данном документе.
ФИГ. 2 показывает рассматриваемый в качестве примера способ оценки дыхательного усилия пациента, подключенного к аппарату искусственной вентиляции легких, и предоставления соответствующих значений параметров в соответствии с рассматриваемым в качестве примера вариантом осуществления, описанным в данном документе.
ФИГ. 3a-3d показывают рассматриваемые в качестве примера графики для оценки в реальном времени сопротивления дыхательных путей (R) испытуемых легких и эластичности (С) легких в соответствии с рассматриваемым в качестве примера вариантом осуществления, описанным в данном документе.
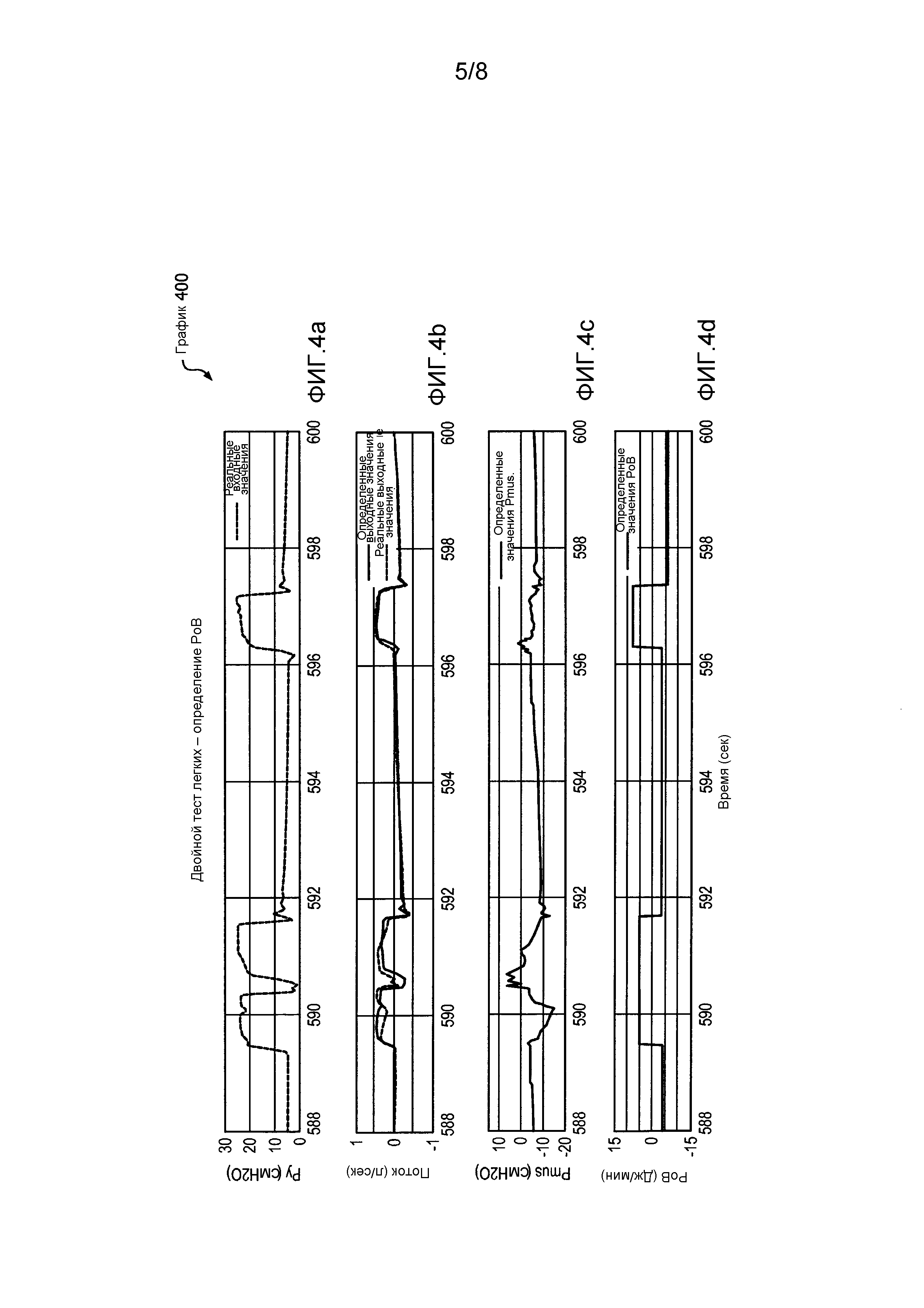
ФИГ. 4а-4d показывают рассматриваемые в качестве примера графики для оценки в реальном времени давления грудных мышц (Pmus) и значения мощности дыхания (РоВ) во время теста легких в соответствии с рассматриваемым в качестве примера вариантом осуществления, описанным в данном документе.
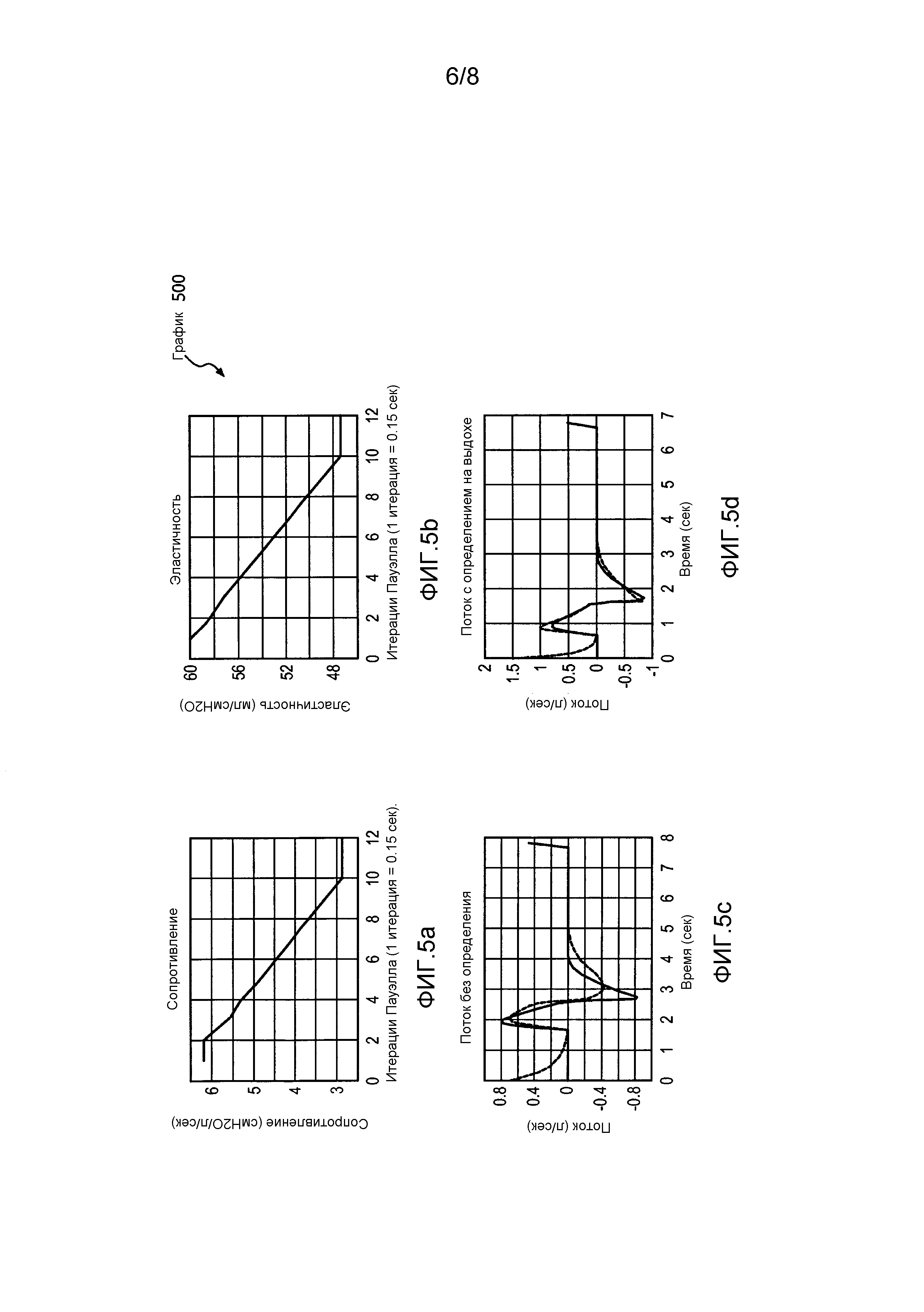
ФИГ. 5a-5d показывают рассматриваемые в качестве примера графики для быстрой (то есть менее 2 секунд) оценки в реальном времени значений R и С для испытуемых легких в соответствии с рассматриваемым в качестве примера вариантом осуществления, описанным в данном документе.
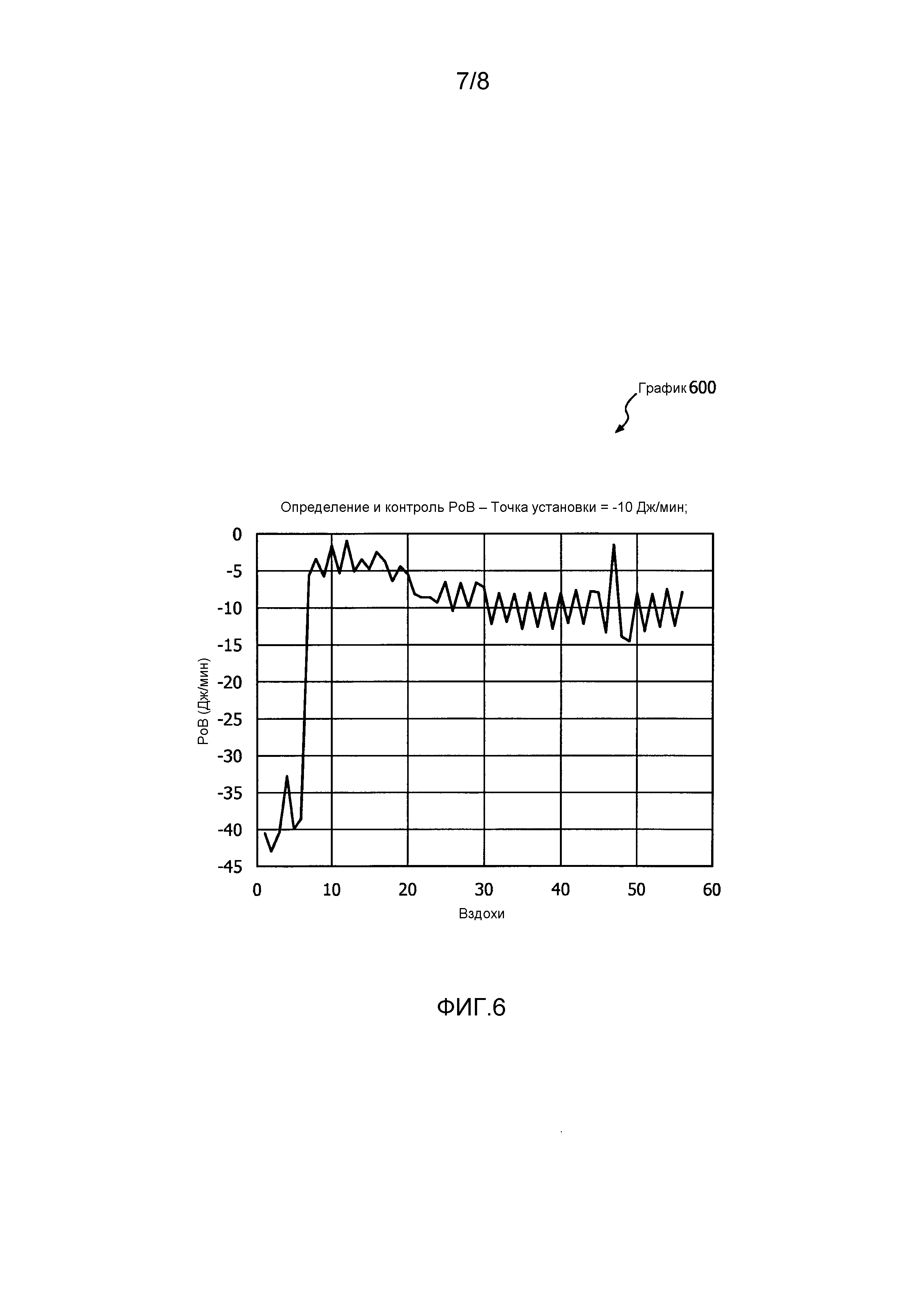
ФИГ. 6 показывает рассматриваемый в качестве примера график производительности контроллера РоВ в реальном времени в соответствии с рассматриваемым в качестве примера вариантом осуществления, описанным в данном документе.
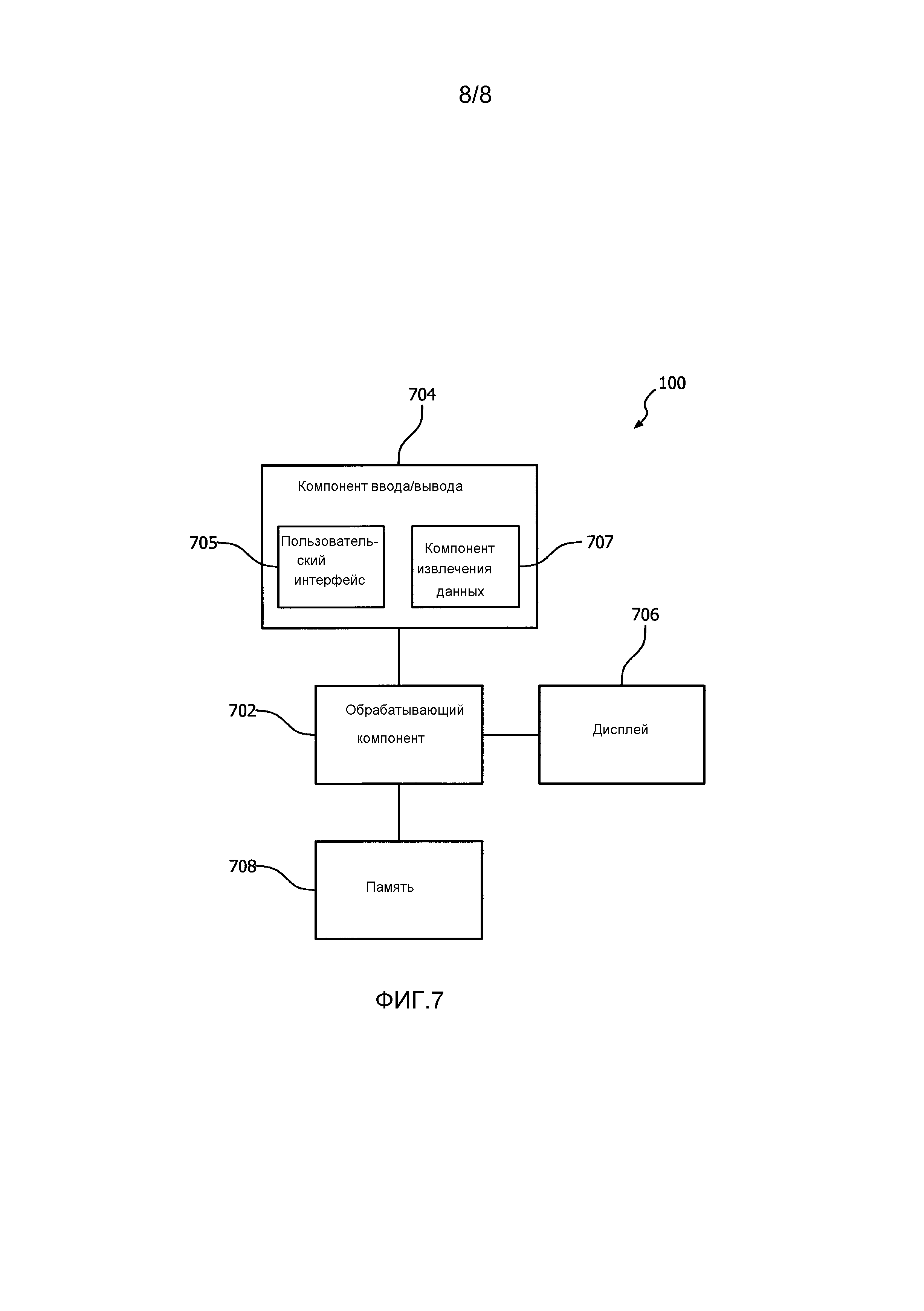
ФИГ. 7 показывает схематичный чертеж системы в соответствии с рассматриваемым в качестве примера вариантом осуществления, описанным в данном документе.
Рассматриваемые в качестве примера варианты осуществления могут быть поняты далее на примере последующего описания рассматриваемых в качестве примера вариантов осуществления и относящихся к ним чертежей, где похожие элементы обозначены одинаковыми ссылочными номерами. Рассматриваемые в качестве примера варианты осуществления относятся к системам и способам оценки мощности дыхания («РоВ») пациента, подключенного к аппарату искусственной вентиляции легких. РоВ пациента может зависеть от любого числа переменных, таких, как, но не ограничиваясь этим, характерные особенности легких, сила легких и т.д. Кроме того, рассматриваемые в качестве примера системы и способы предоставляют информацию поддержки для системы искусственной вентиляции легких, такую, как параметры системы и значения.
Более конкретно, рассматриваемые в качестве примера системы и способы используют замкнутую систему управления с обратной связью для того, чтобы автоматически и неинвазивно оценивать, какое усилие прикладывает пациент, подключенный к аппарату искусственной вентиляции легких. Оценка этого усилия позволяет пользователю (например, врачу, человеку, ухаживающему за пациентом, больничному персоналу и т.д.) принимать решение о выборе функций аппарата искусственной вентиляции легких с соответствующими значениями параметров системы, а также о любых настройках к этим функциям. Как вариант, рассматриваемые в качестве примера системы и способы, описанные в данном документе, также могут автоматически осуществлять выбор и настройку этих функций без вмешательства пользователя.
Как будет более детально описано ниже, эти рассматриваемые в качестве примера системы и способы используют алгоритмы оптимизации в сочетании с системой управления с обратной связью для вычисления переменных легких пациента, таких, как давление и объем. Основываясь на этих вычисленных переменных, системы и способы предоставят настройки параметров аппарата искусственной вентиляции легких для достижения желаемого уровня дыхания. Кроме того, оценки, выполненные системами и способами, позволяют пользователю легко определять кандидатов для отлучения от вентиляции (то есть уменьшение зависимости пациента от системы искусственной вентиляции легких).
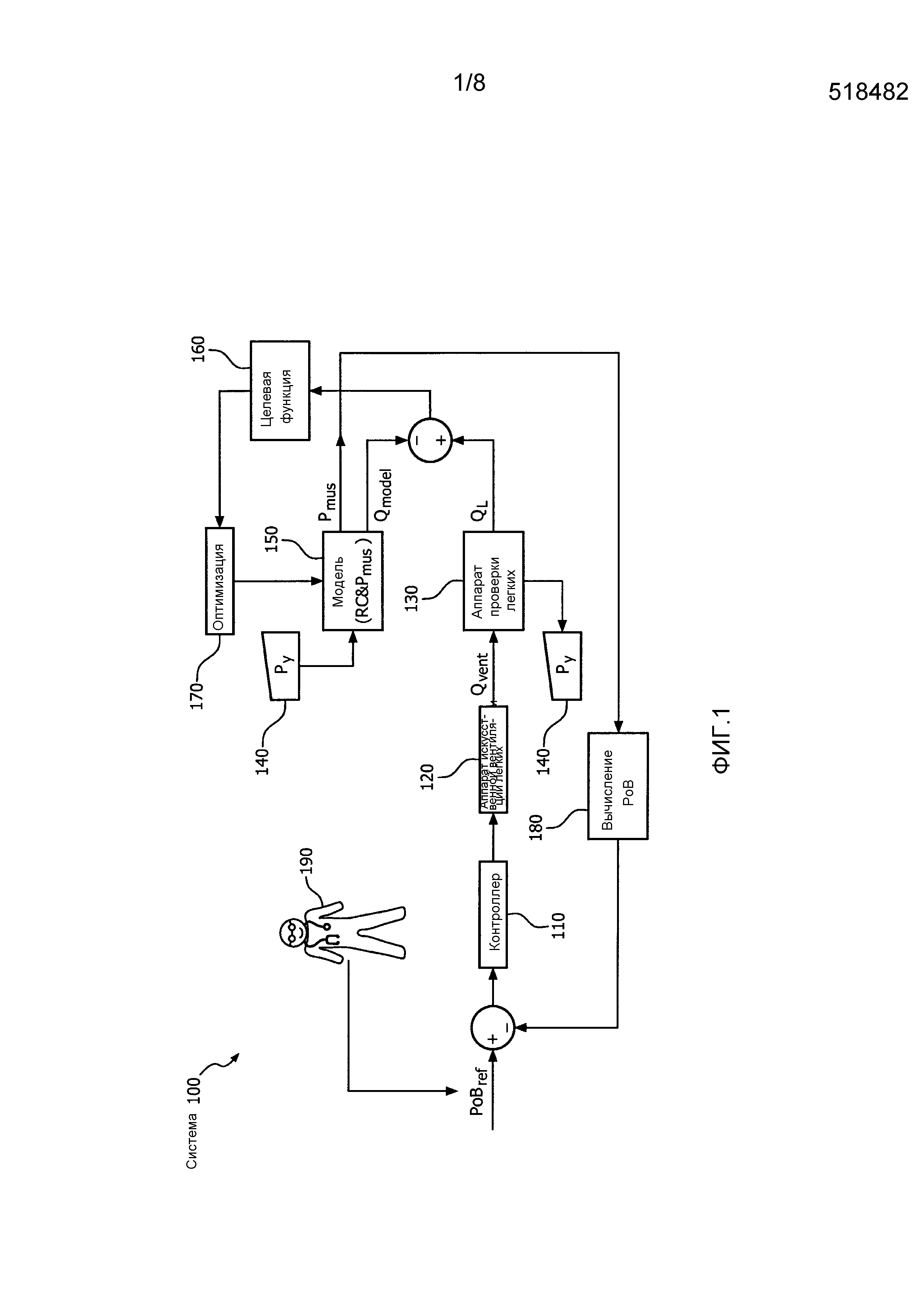
Фиг. 1 показывает рассматриваемую в качестве примера систему с обратной связью 100 для оценки дыхательного усилия пациента, подключенного к аппарату искусственной вентиляции легких, и предоставления подходящих значений параметров в соответствии с рассматриваемым в качестве примера вариантом осуществления, описанным в данном документе. Архитектура системы 100 включает в себя контроллер 110, аппарат искусственной вентиляции легких 120, пациента 130, контур модели легких 150 и оптимизатор 170. Следует отметить, что в то время как Фиг. 1 изображает «аппарат проверки легких» на 130, этот компонент может быть как присоединен к пациенту во время медицинской практики, так и отсоединен от пациента для калибровки системы 100. Другими словами, аппарат проверки легких 130 может выступать в роли легких пациента во время проверки производительности и калибровки системы 100. Для простоты аппарат проверки легких на Фиг. 1 может быть отнесен к пациенту 130. Соответственно, система 100 дает возможность неинвазивной оценки силы легких и характерных особенностей легких пациента 130, в то же время предлагая соответствующую информацию поддержки для настройки аппарата искусственной вентиляции легких 120.
Рассматриваемый в качестве примера контроллер 110 может быть, например, пропорциональным интегральным контроллером. Однако контроллер 110 также может быть любым контроллером с хорошим запасом по устойчивости для отслеживания и подавления помех. Следует отметить, что, несмотря на то, что контроллер 110 и аппарат искусственной вентиляции легких 120 изображены как отдельные компоненты внутри системы 100, эти компоненты могут быть объединены в один компонент.
Рассматриваемая в качестве примера система управления с обратной связью 100 на Фиг. 1 изображает врача 190, настраивающего эталонное значение для желаемой мощности дыхания (PoBref). Более конкретно, значение PoBref, выбранное врачом 190, может быть введено в контроллер 110. Контроллер 110 настраивает параметры аппарата искусственной вентиляции легких 120, тем самым настраивая значение воздушного потока от аппарата искусственной вентиляции легких (Qvent). Когда значение Qvent достигает пациента 130, пациент 130 отвечает значением воздушного потока в легких (Ql) и значением давления в тройнике (Py) 140. Тогда значение PY 140 подается на контур модели легких 150, где модель 150, в свою очередь, обеспечивает воздушный поток, рассчитанный моделью 150 (Qmodel).
Контур модели 150 является простой математической моделью, такой как гидравлический RC-контур, для моделирования легких пациента 130 в реальном времени, основываясь на сопротивлении дыхательных путей легких (R) и эластичности легких (С). Более конкретно, модель 150 точно моделирует легкие пациента во всех случаях, когда значения R и С модели 150 соответствуют этим же параметрам у пациента 130.
Для того, чтобы получать значения R и С пациента в реальном времени, рассматриваемая в качестве примера система 100 использует алгоритмы оптимизации оптимизатора 170. Например, если значение Qmodel и значение Ql не равны (то есть модель 150 не моделирует пациента 130), тогда в оптимизирующий алгоритм оптимизатора 170 может быть подана ошибочная разница. Соответственно, оптимизатор 170 может использовать эту ошибочную разницу в качестве точки целевой функции 160, которую необходимо минимизировать. Конструкция целевой функции 160 во времени может быть отнесена оптимизатором 170 к «оптимизации без градиента». Следует отметить, что эта конкретная техника оптимизации всего лишь пример одного алгоритма, используемого оптимизатором 170. Любое число алгоритмов вычисления параметра также может быть реализовано для того, чтобы предоставить адекватные результаты в реальном времени.
Независимо от конкретных алгоритмов, реализованных оптимизатором 170, выходом оптимизатора 170 является набор новых значений R и С. Затем эти новые значения R и С передаются модели 150, а модель 150, таким образом, соответственно обновляется. Используя значения R и С, модель 150 вычисляет давление грудных мышц (Pmus). Так модель 150 может вычислять Pmus, основываясь на следующей формуле:
Pmus=QL⋅R+Vl/C-Py.
Как только Pmus вычислено, РоВ рассчитана в 180 и передана обратно контроллеру 110. Так РоВ может быть вычислено при помощи следующей формулы:
РоВ=интеграл (Pmus⋅QLdt).
Затем в контроллере 110 значение РоВ из 180 сравнивается с эталонным значением (PoBref), заданным врачом 190. Соответственно, ошибка, полученная из этого сравнения, предоставляет сведения о параметрах для подходящих настроек аппарата искусственной вентиляции легких 120. Настройки, сделанные в аппарате искусственной вентиляции легких 120, могут быть выполнены контроллером 110 автоматически (то есть без вмешательства пользователя) или, как вариант, контроллер 110 может обеспечить пользователя инструкциями по настройке для выбора значений аппарата искусственной вентиляции легких 120 вручную.
Как описано выше, рассматриваемая в качестве примера система 100 позволяет пользователю (например, врачу 190) работать на более высоком стратегическом уровне и устраняет необходимость беспокоиться о «трубках и регуляторах» аппарата искусственной вентиляции легких 120. Примером стратегического решения, принимаемого врачом 190, может быть то, что пациент 130 должен дышать не сильнее 10 Дж/мин (то есть джоулей работы грудных мышц в минуту). Используя этот высокоуровневый параметр от врача 190, рассматриваемая в качестве примера система 100 осуществляет задачу автоматического поддержания дыхания пациента на 10 Дж/мин без необходимости врачу настраивать или управлять аппаратом искусственной вентиляции легких 120. Как отмечено выше, другой вариант осуществления системы 100 позволяет врачу быть «в петле», так как контроллер 110 обеспечивает врача 190 подходящими инструкциями по настройке аппарата искусственной вентиляции легких. Тогда, соответственно, врач может принимать окончательное решение принять или отклонить настроечные решения (например, параметры регуляторов), предоставляемые контроллером 110.
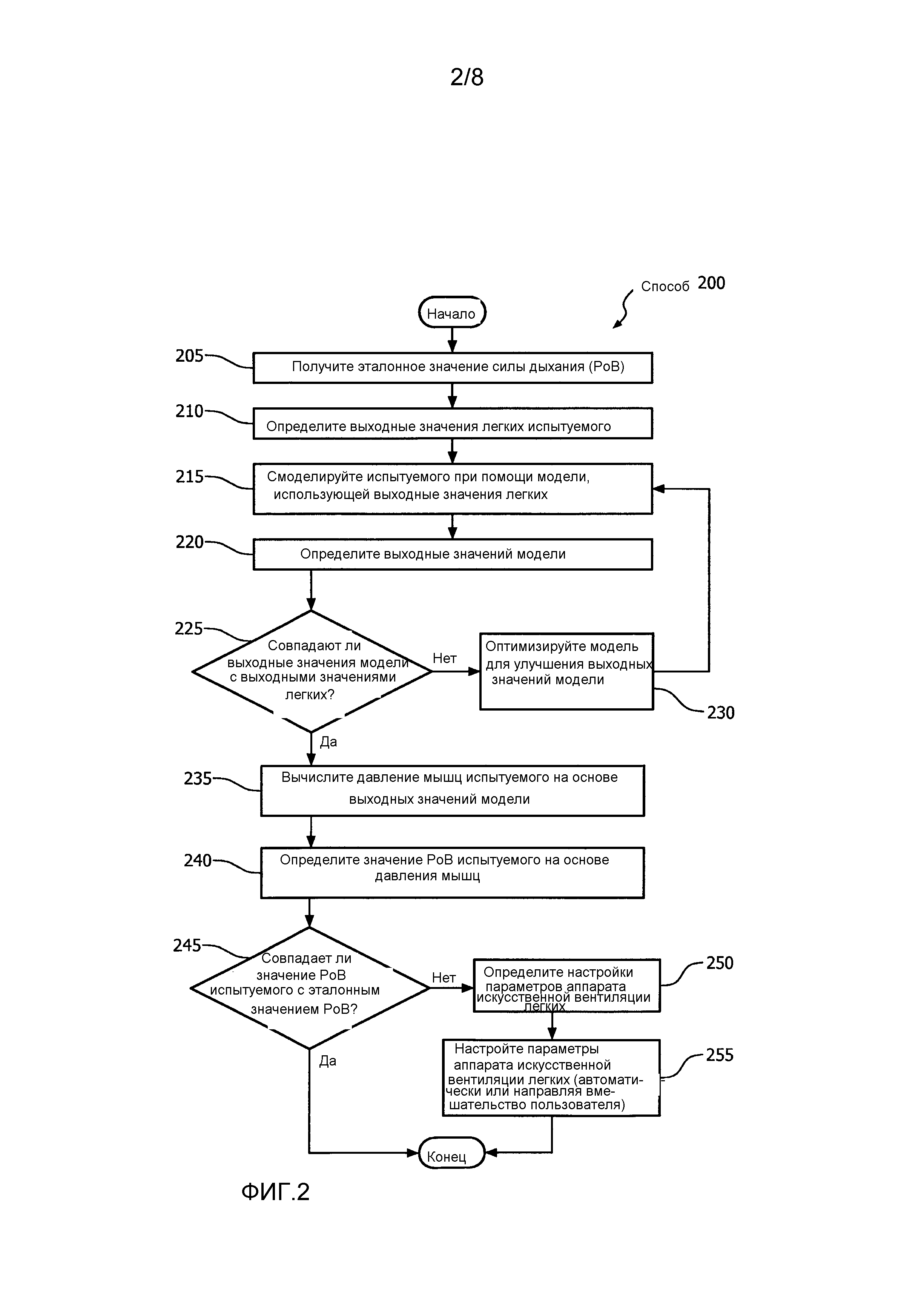
Фиг. 2 показывает рассматриваемый в качестве примера способ 200 для оценки дыхательного усилия пациента 130, подключенного к аппарату искусственной вентиляции легких, и предоставления подходящих значений параметров в соответствии с рассматриваемым в качестве примера вариантом осуществления, описанным в данном документе. Стоит отметить, что способ 200 будет рассмотрен на примере системы 100 и связанных с ней компонентов, изображенных на Фиг. 1.
Как подробно описано выше, система 100 позволяет пользователям (например, врачам, больничному персоналу и т.д.) оценивать РоВ пациента 130 и предлагает настройки работы аппарата искусственной вентиляции легких 120.
В соответствии с одним из рассматриваемых в качестве примера вариантов осуществления способ 200 может быть выполнен дополнительным добавляемым к существующим сервисам компонентом, таким, как аппарат наркоза или кардиомонитор (например, платформа Philips ALPS или платформа Philips NM3). Как вариант, способ 200 может быть выполнен автономным аппаратом искусственной вентиляции легких в пределах больницы (например, в блоке интенсивной терапии («ICU»), пункте неотложной помощи («ER»), операционной («OR») и т.д.).
На этапе 205 система 100 получает эталонное значение РоВ от пользователя (например, врача 190). Несмотря на то, что рассматриваемая в качестве примера система 100 описывает врача 190 как источник эталонного значения РоВ, эта информация может быть извлечена из любого источника как вручную (например, посредством персонала), так и автоматически (например, посредством системы поддержки принятия клинических решений («CDS»)).
На этапе 210 система 100 определяет выходные значения легких испытуемого. Эти выходные значения включают в себя значение давления PY 140 и значение воздушного потока Ql от испытуемого. Как отмечено выше, испытуемым может быть как пациент 130 под медицинским присмотром, или аппарат проверки легких, используемый для калибровки системы 100.
На этапе 215 система 100 моделирует легкие испытуемого при помощи модели 150. Более конкретно, модель 150 получает значение давления испытуемого PY 140 в качестве входных данных и моделирует легкие, основываясь на этом значении. Как описано выше, модель 150 может быть математическим гидравлическим RC-контуром, используемым для моделирования легких в реальном времени.
На этапе 220 система 100 определяет выходные значения модели 150, так как она моделирует легкие. Эти выходные значения включают в себя значение воздушного потока Qmodel от модели 150.
На этапе 225 система 100 сравнивает значение воздушного потока Ql испытуемого со значением воздушного потока Qmodel модели 150. Если значения совпадают, способ 200 может переходить к этапу 235. Однако если значения не совпадают, способ 200 переходит к этапу 230 для оптимизации.
На этапе 230 оптимизатор 170 системы 100 получает разницу между значением воздушного потока Ql испытуемого и значением воздушного потока Qmodel модели 150 и использует эту разницу в качестве точки целевой функции 160, которая должна быть минимизирована. Используя алгоритмы оптимизации, оптимизатор 170 выбирает новые значения сопротивления дыхательных путей R модели 150 и эластичности легких С модели 150. Эти новые значения используются для обновления модели 150, и способ 200 переходит к этапу 215 для моделирования испытуемого.
На этапе 235 система 100 вычисляет давление грудных мышц (Pmus) испытуемого, основываясь на совпадающих выходных значениях модели. Как детально описано выше, система 100 может использовать уравнение модели Pmus для нахождения Pmus, используя значения R и С. Следует отметить, что любые переменные в этих уравнениях со временем изменятся.
На этапе 240 система 100 определяет РоВ испытуемого, основываясь на Pmus, рассчитанном на этапе 235. Как детально описано выше, система 100 может использовать уравнение РоВ 180 для нахождения РоВ испытуемого, используя значения Pmus и QL.
На этапе 245 система 100 сравнивает РоВ испытуемого с эталонной РоВ. Если значения РоВ совпадают, значит, система 100 достигла дыхательного давления и функций, желаемых врачом 190. Однако если значения РоВ не совпадают, способ 200 переходит к этапу 250 для оптимизации.
На этапе 250 система 100 определяет настройки параметров аппарата искусственной вентиляции легких 120. Эти настройки могут включать в себя изменение таких параметров, как дыхательный объем, частота дыхательных движений, показания давления, воздушный поток и т.д. К тому же любые настройки параметров могут включать в себя изменения режима работы аппарата искусственной вентиляции легких 120. Специалистам в данной области техники будет понятно, что эти различные режимы могут быть реализованы в любом количестве концепций, таких как, но не ограничиваясь этим, управляемая объемом непрерывная принудительная вентиляция, управляемая объемом периодическая принудительная вентиляция, управляемая давлением непрерывная принудительная вентиляция, управляемая давлением периодическая принудительная вентиляция, непрерывная спонтанная вентиляция, высокочастотные системы вентиляции и т.д.
На этапе 255 система 100 настраивает параметры аппарата искусственной вентиляции легких 120 в соответствии с настройками, определенными на этапе 250. Как детально описано выше, настройки, выполняемые над работой аппарата искусственной вентиляции легких 120, могут быть выполнены как автоматически системой 100, так и, как вариант, пользователем по указаниям системы 100. Как только параметры аппарата искусственной вентиляции легких 120 были настроены (автоматически или вручную), система 100 достигла дыхательного давления и функций, желаемых врачом 190.
Рассматриваемый в качестве примера способ 200, описанный выше, является просто примером любого числа этапов, выполняемых системой 100 и связанными с ней компонентами. Соответственно, система 100 не ограничивается этапами, представленными в рассматриваемом в качестве примера способе 200, и может выполнять дополнительные этапы или меньше этапов, чем этапы 210-255, и любые подэтапы, а также в любом порядке.
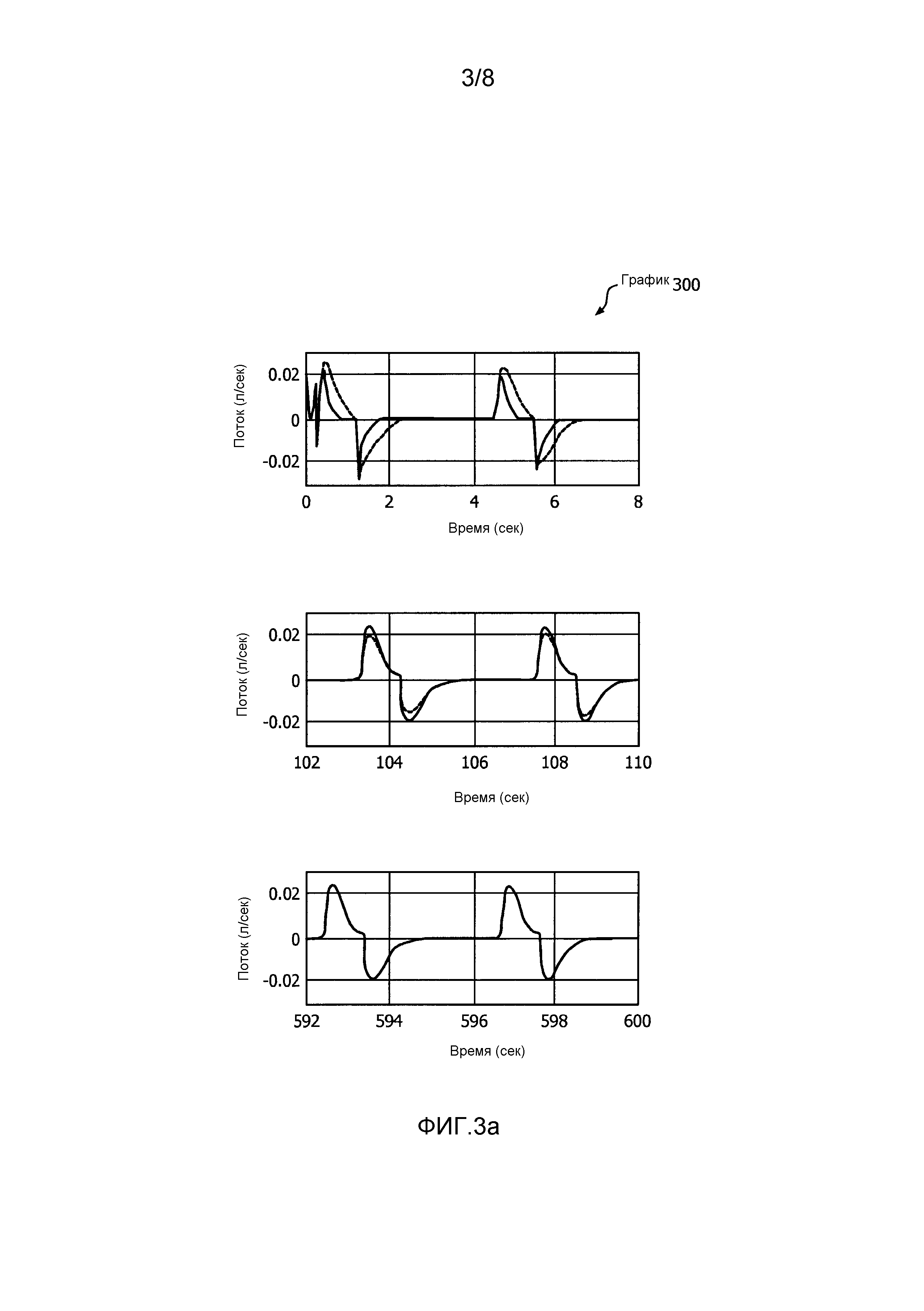
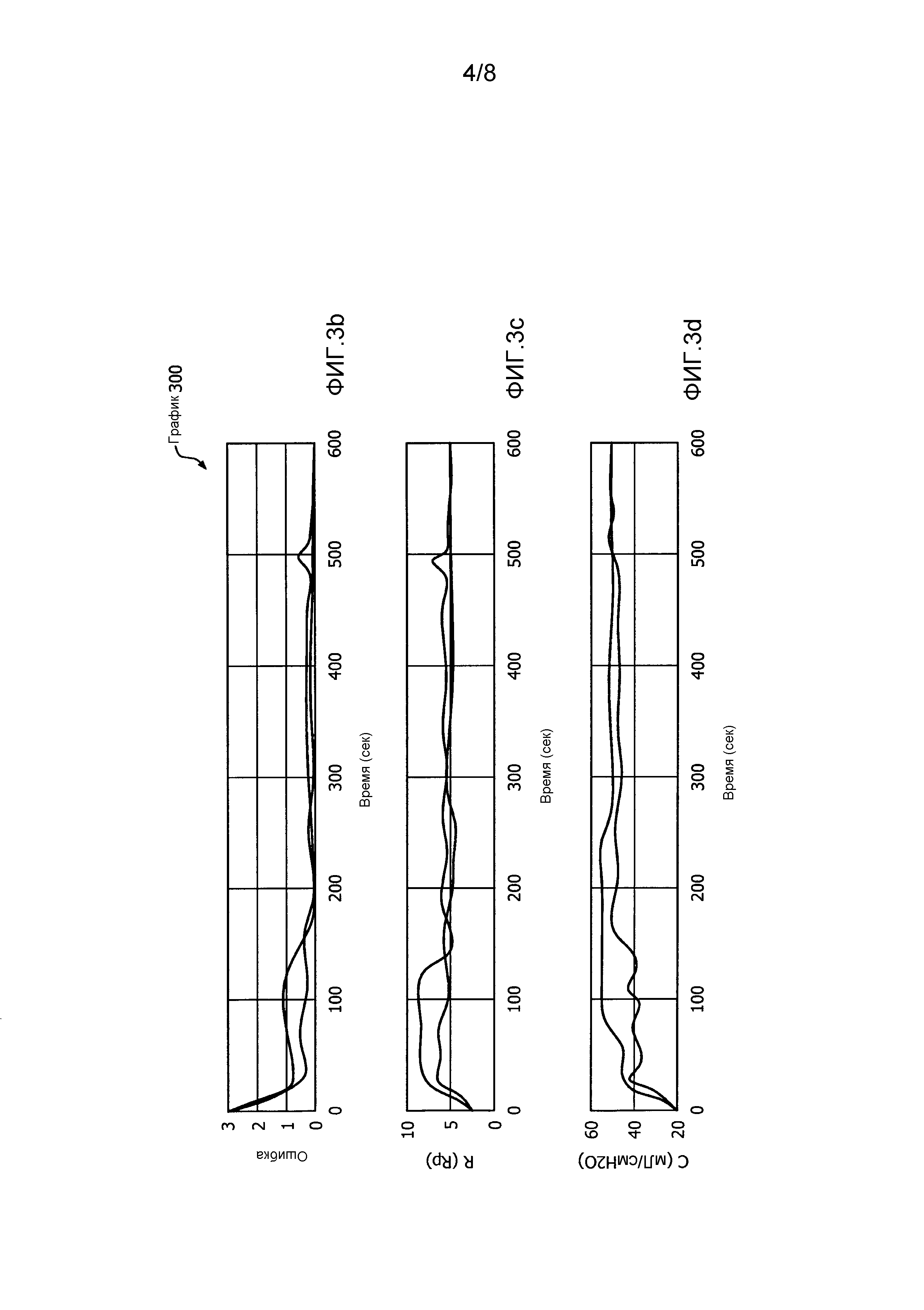
Фиг. 3a-3d показывают рассматриваемые в качестве примера графики для определения в реальном времени сопротивления дыхательных путей (R) испытуемых легких и эластичности (С) легких в соответствии с рассматриваемым в качестве примера вариантом осуществления, описанным в данном документе. Фиг. 3а демонстрирует, что, если взять достаточно длинный промежуток времени, то воздушный поток, рассчитанный моделью 150 (Qmodel), очень хорошо подходит для аппроксимации воздушного потока в легких пациента (QL). Фиг. 3b иллюстрирует ошибочную разницу между двумя сигналами верхней секции. При этом Фиг. 3с и 3d изображают значения R и С соответственно. Оба значения R и С могут стремиться к правильным значениям, так как они были настроены заранее при помощи аппарата проверки легких.
Соответственно, алгоритмы оптимизации не требуют этих двух заданных значений.
Фиг. 4a-4d показывают рассматриваемые в качестве примера графики 400 для определения в реальном времени давления грудных мышц (Pmus) и значения мощности дыхания (РоВ) во время теста легких в соответствии с рассматриваемым в качестве примера вариантом осуществления, описанным в данном документе. Фиг. 4а иллюстрирует давление в тройнике как функцию от времени PY(t). Фиг. 4b иллюстрирует определенный выходной воздушный поток (сплошная линия) и реальный выходной поток (пунктирная линия), в котором приемлема аппроксимация в реальном времени. Фиг. 4с и 4d иллюстрируют неинвазивное определение в реальном времени Pmus и РоВ соответственно.
Фиг. 5a-5d показывают рассматриваемые в качестве примера графики 500 для быстрого (например, менее 2 секунд) определения в реальном времени значений R и С для испытуемых легких в соответствии с рассматриваемым в качестве примера вариантом осуществления, описанным в данном документе. В то время как на Фиг. 3 изображено определение в реальном времени на более длинном промежутке времени (например, 500 секунд), Фиг. 5а-5d выполняют ту же задачу на промежутке времени менее 2 секунд. Значения R и С быстро стремятся к правильным значениям, как показано на Фиг. 5а и 5b соответственно. Фиг. 5с и 5d иллюстрируют схождение Qmodel и QL для случая без определения параметра и с определением параметра соответственно.
Фиг. 6 показывает рассматриваемый в качестве примера график 600 производительности контроллера РоВ 110 в реальном времени в соответствии с рассматриваемым в качестве примера вариантом осуществления, описанным в данном документе. Как детально описано выше, PoBref может быть задано врачом 190. В соответствии с Фиг. 6 PoBref задано на -10 Дж/мин, где направление воздуха (втягивание или выталкивание) определяет изменение знака перед этим значением. За 25 вздохов (пациента 130 или легочного аппарата) достигнута желаемая PoBref.
Фиг. 7 показывает схематичный чертеж системы 100 в соответствии с рассматриваемым в качестве примера вариантом осуществления, включающим в себя обрабатывающий компонент (например, процессор 702), компонент ввода/вывода 704, дисплей 706 и машиночитаемый энергонезависимый носитель (например, память 708). Процессор 702 способен обрабатывать данные, введенные посредством компонента входа/выхода 704, таких, как данные, полученные от пользовательского интерфейса 705 и компонента извлечения данных 707. Данные могут включать в себя эталонные значения дыхания для определения любой ошибочной разницы между значением дыхания рассматриваемого в качестве примера контура модели и значением дыхания испытуемого. Дисплей 706 может быть использован для отображения информации о модели, различных измерений и показаний пациента, значений параметров аппарата, вентиля настройки параметров, инструкций для пользователя и т.д. Например, отображаемая информация о моделировании может быть загружена из памяти 708, которая содержит базу данных, хранящую компьютеризованное представление общепринятых в данной отрасли моделей контуров, руководства, протоколы и/или последовательность выполняемых действий. Память 708 также хранит информацию, которая была обновлена информацией о конкретном пациенте. Пользовательский интерфейс 704 может включать в себя мышь для указания и выбора объектов на дисплее 706, тач-дисплей и/или клавиатуру. Память 708 может быть любым известным считываемым компьютером носителем. Специалистам в данной области будет понятно, что система 100 является, к примеру, персональным компьютером, сервером или любым другим обрабатывающим устройством.
Специалистам в данной области будет понятно, что описанный выше рассматриваемый в качестве примера вариант осуществления может быть реализован любым количеством способов, включая, в качестве отдельного программного модуля, в качестве комбинации аппаратной части и программного обеспечения и т.д. Например, система 100 и связанные с ней компоненты могут быть программой, содержащей в себе строки кода, хранящейся на считываемом компьютером энергонезависимом носителе, которая, после того, как будет скомпилирована, может быть выполнена процессором. Также из описания выше должно быть очевидно, что рассматриваемые в качестве примера варианты осуществления позволяют работать обрабатывающему устройству более эффективно, если пользователь приводит в исполнение систему 100, например, улучшением оценки дыхания пациента для специалистов в области здравоохранения, автоматическим предложением одного или более параметра аппарата искусственной вентиляции легких, основанным на оценке усилия, содействием в определении кандидатов на отлучение от вентиляции легких, помощью специалистам в области здравоохранения в процессе отлучения от вентиляции легких и т.д.
Следует отметить, что формула изобретения может содержать ссылочные позиции/номера в соответствии с правилом 6.2(b) Договора о патентной кооперации (РСТ). Однако представленная формула изобретения не должна рассматриваться как ограниченная рассматриваемыми в качестве примера вариантами осуществления, соответствующими ссылочным позициям/номерам.
Специалистам в данной области будет очевидно, что в настоящем изобретении могут быть сделаны различные модификации без отступления от сущности и объема настоящего изобретения. Таким образом, предполагается, что настоящее изобретение охватывает модификации и вариации данного изобретения при условии, что они входят в объем прилагаемой формулы изобретения и ее эквивалентов.
Реферат
Группа изобретений относится к медицинской технике. Система для настройки параметра аппарата искусственной вентиляции легких содержит компонент извлечения данных для извлечения эталонного значения мощности дыхания и обрабатывающий компонент, выполненный с возможностью оценки значения мощности дыхания испытуемого посредством аппарата искусственной вентиляции легких, определения разницы между эталонным значением мощности дыхания и значением мощности дыхания испытуемого и генерации значения настройки параметра для настройки параметра аппарата искусственной вентиляции легких на основе определенной разницы. Параметр аппарата искусственной вентиляции легких представляет собой дыхательный объем, частоту дыхательных движений, показания давления, воздушный поток или режимы работы аппарата искусственной вентиляции легких. Раскрыт машиночитаемый энергонезависимый носитель, хранящий набор инструкций для работы системы. Технический результат состоит в обеспечении выбора параметров дыхания для эффективной вентиляции конкретного пациента. 2 н. и 11 з.п. ф-лы, 7 ил.
Комментарии