Способы и системы для управляемого размещения игольных конструкций в ткани - RU2626906C2
Код документа: RU2626906C2
Чертежи




















Описание
Перекрестная ссылка на родственные заявки
По настоящей заявке испрашивается приоритет на основании заявки на патент США №13/801,782, поданной 13 марта 2013 г. (номер дела поверенного 31992-714.201), а также заявки на патент США №13/801,840, поданной 13 марта 2013 г. (номер дела поверенного 31992-714.202), каждая из которых имеет приоритет на основании предварительной заявки №61/698,196 (номер дела поверенного 31992-714.101), поданной 7 сентября 2012 г., полные описания которых включены в настоящее описание путем ссылки.
Уровень техники
1. Область техники, к которой относится изобретение.
Настоящее изобретение относится в общем к медицинским способам и устройствам. Конкретнее, настоящее изобретение относится к способам и системам для управления размещением игл с использованием границ терапии и безопасности, спроецированных на изображение подвергаемой лечению ткани.
При современном лечении органов и тканей в организме человека часто используется игла или другое удлиненное тело для подачи энергии, лекарственных препаратов и т.п. При необходимости в этих способах используется ультразвуковая визуализация для наблюдения и идентификации целевой области лечения, а также отслеживания положения иглы относительно целевой области лечения.
Особый интерес в рамках настоящего изобретения представляет недавно предложенное лечение маточных фиброидов, основанное на позиционировании терапевтического устройства в матке пациента при трансвагинальном или лапароскопическом доступе. Радиочастотная игла или игла для излучения другого вида энергии либо введения лекарственного вещества размещается из устройства в фиброид, после чего осуществляется подача энергии и/или лекарственных веществ для абляции или лечения фиброида. Чтобы способствовать определению местонахождения фиброидов и позиционированию игл в фиброидах, устройство включает в себя матрицу формирования ультразвукового изображения с регулируемым полем обзора обычно в переднем или латеральном направлении относительно осевого стержня, несущего иглу. Игла продвигается из стержня через поле обзора, так что игла может быть визуализирована и направлена в ткань и целевой фиброид.
Будучи эффективными и весьма полезными для пациентов, такие протоколы абляции и лечения с помощью иглы сталкиваются с рядом проблем. Во-первых, начальное размещение иглы может вызывать затруднения, особенно у врачей, не имеющих большого опыта. Несмотря на то, что врач имеет возможность видеть ткань и целевую анатомическую область в режиме реального времени на экране для получения изображения, может оказаться трудным точно спрогнозировать траекторию движения иглы и оценить ее конечное положение для проведения лечения. При том, что игла, безусловно, может быть частично или полностью отведена назад и размещена заново, предпочтительно минимизировать число необходимых размещений перед проведением терапии.
Вторая проблема возникает после того, как игла размещена. Несмотря на то, что положение иглы можно наблюдать на ультразвуковом или другом визуальном изображении, может оказаться трудным спрогнозировать объем терапевтического вмешательства в результате подачи энергии или другого терапевтического средства. Как и с начальным позиционированием, помогает опыт, однако желательно уменьшить необходимость опираться на здравый смысл и догадки.
Третья проблема связана с обеспечением того, чтобы близлежащие чувствительные тканевые структуры, например серозная оболочка, окружающая миометрий, не были случайно повреждены. Как и в случае принятия решения об объеме терапевтического вмешательства, прогнозирование пределов безопасности лечения может вызывать затруднения.
В патенте США №8,088,072, также принадлежащем заявителю настоящей заявки, описана система для составления границ терапии и безопасности на изображении в реальном времени в отношении фиброида или другой тканевой структуры, подвергаемой лечению. Будучи весьма эффективной при использовании с одинарными иглами, система по патенту 072 не оптимизирована для применения с множеством узлов игла/игольный элемент, таких как описаны в патентах США №№8,206,300 и 8,262,574.
В связи с этим желательно создать усовершенствованные системы и способы для размещения игл для подачи энергии и других игл в полях обзора ультразвуковой или иной визуализации в протоколах по подаче энергии или других терапевтических воздействиях. В особенности полезно обеспечить лечащему врачу информацию, которая поможет при начальном размещении множества игл или игольных элементов, чтобы повысить вероятность того, что узел иглы будет должным образом размещен относительно целевой анатомической области, подвергаемой лечению. Желательно также обеспечить врачу обратную связь, чтобы помочь точно спрогнозировать объем терапевтического вмешательства. Такая информация позволит врачу в случае необходимости переустановить зонд, чтобы повысить вероятность полного излечения анатомической области. Кроме того, желательно обеспечить врачу обратную связь, которая позволит врачу оценить пределы безопасности, чтобы не повредить чувствительные тканевые структуры. Такая обратная связь или иная информация предпочтительно обеспечивается визуально на экране для ультразвуковой или иной визуализации, так чтобы положение иглы можно было быстро спрогнозировать, оценить и начать лечение. Желательно также, чтобы информация, поступающая по каналу обратной связи, присутствовала на экране устройства отображения в ответ на манипулирование зондом, минимизируя при этом необходимость в вводе данных или команд в контроллер системы или устройство отображения, а кроме того, желательно, чтобы такие манипуляции с зондом могли устанавливать стопоры или другие ограничители, контролирующие протяженность последующего размещения игл. Попытки решения по меньшей мере некоторых из этих задач предприняты в изобретениях, описанных ниже.
2. Уровень техники.
Патенты США №№8,088,072; 8,206,300 и 8,262,574 описаны выше и включены в настоящее описание путем ссылки. В патенте США № 7,918,795, также принадлежащем заявителю настоящей заявки, описаны зонды, полезные как для визуализации, так и для лечения маточных фиброидов, при этом зонды могут быть использованы в системах и способах по настоящей заявке и включены в настоящее описание путем ссылки. В число других патентов и опубликованных заявок того же заявителя, описывающих зонды, полезные для лечения маточных фиброидов в системах, входят патенты США №№7,874,986 и 7,815,571, а также публикации заявок на патенты США 2007/0179380 и 2008/0033493. Также см. патент США №6,050,992 и публикацию заявки на патент США 2007/0006215.
Раскрытие изобретения
В настоящем изобретении предложены способы и системы для размещения игольных конструкций в ткани. Игольные конструкции в некоторых случаях могут содержать одинарную иглу, однако в большинстве случаев содержат множество игл или узлов игл и игольных элементов, как будет подробнее описано ниже. Игольные конструкции обычно предназначены для терапевтического воздействия на ткань, как правило, будучи выполненными с возможностью подачи радиочастотной энергии, плазменной энергии, энергии терапевтического ультразвука, микроволновой энергии, тепла, холода (криогенная терапия) или другой энергии для абляции или иного изменения целевой ткани или целевой анатомической области в ткани. В качестве альтернативы игольные конструкции могут также обеспечивать введение лекарственного препарата или иного вещества, морцелляцию или иную обработку ткани, которая может быть проведена с использованием игольной конструкции.
Способы и системы по настоящему изобретению особенно пригодны для лечения фиброидов в матке пациента, при этом зонд, несущий игольную конструкцию и визуализирующий преобразователь, обычно преобразователь ультразвукового изображения, вводится трансвагинально и трансцервикально в матку либо в других случаях лапароскопически с наружной стороны матки или другого органа либо целевой ткани. Зондом манипулируют в матке для подачи абляционной энергии в фиброид, как подробнее описано ниже. В большинстве вариантов осуществления настоящего изобретения игольная конструкция «виртуально» размещается на изображении ткани в масштабе реального времени перед действительным размещением иглы в подлинной ткани.
Границы терапии и/или безопасности в ткани также определяются и при необходимости регулируются перед действительным размещением игольной конструкции. В других вариантах осуществления фактическое положение игольной конструкции может отслеживаться и соответствующие границы терапии и/или безопасности проецироваться на экран в режиме реального времени. Во всех вариантах осуществления границы терапии и безопасности могут контролироваться до начала проведения лечения.
Способы и системы по настоящему изобретению дополнительно предполагают, что, после того как параметры виртуального размещения выбраны с использованием виртуальных изображений, игольная конструкция действительно размещается в подлинной ткани в том местоположении и/или по той схеме, которые согласуются с конфигурацией виртуального размещения. В первом примере осуществления такое размещение достигается путем манипулирования «стопорами» или другими механическими элементами на зонде в процессе виртуального размещения на изображении в реальном времени. Положения стопоров соответствуют фактическим положениям размещения иглы (стопоры обычно действуют в качестве ограничителей, позволяющих разместить игольную конструкцию в конкретном месте и по конкретной схеме), при этом система осуществляет расчет границ терапии и/или безопасности на основе положений останова, а также данных по подаче энергии, которые поступают в контроллер системы или генерируются им. Данная система в качестве альтернативы или дополнительно может отслеживать положение терапевтического зонда и/или игольной конструкции в матке, тем самым позволяя рассчитать и/или скорректировать границы терапии и безопасности, проецируемые на изображение ткани в режиме реального времени, по мере того как лечащий врач перемещает зонд и продвигает игольную конструкцию. В первом примере осуществления, после того как область проведения терапии и/или граница безопасности должным образом установлены на изображении в реальном времени относительно анатомической области, подвергаемой лечению, врач может удерживать зонд на месте и размещать игольную конструкцию, пока она не достигнет своего положения «останова», предварительно введенного в зонд в процессе первичной визуализации на начальной фазе лечения. В некоторых случаях стопоры могут автоматически устанавливаться, по мере того как врач манипулирует границей терапии и/или безопасности на экране, используя органы управления на терапевтическом зонде. В альтернативных вариантах осуществления врач может манипулировать зондом и продвигать игольную конструкцию, наблюдая границы безопасности и/или терапии в режиме реального времени без предварительного просмотра виртуальных проекций.
В примерах осуществления из терапевтического зонда размещается по меньшей мере одна основная или центральная игла, а из основной или центральной иглы (игл) размещается множество игольных элементов или вспомогательных игл. Чаще всего имеется единственная основная игла, размещаемая дистально от стержня зонда вдоль его центральной оси. Затем из одинарной иглы продвигается множество игольных элементов, расходящихся в дистальном направлении. В других вариантах осуществления множество игл или игольных элементов могут продвигаться из зонда без использования основной или центральной игла. В этих случаях иглы или игольные элементы обычно развертываются или расходятся, образуя трехмерный массив по мере их продвижения в дистальном направлении.
В число примеров анатомических структур, которые могут быть визуализированы, а затем подвергнуты лечению, входят фиброиды, опухоли, инкапсулированные тканевые массы, псевдо-инкапсулированные тканевые массы и т.п. Что представляет особый интерес в рамках настоящего изобретения, зонд может располагаться в матке, а игольная конструкция размещаться в местоположении, проксимальном относительно фиброида, или в пределах фиброида, находящегося в ткани миометрия матки. В этих случаях желательно также сформировать изображение серозной оболочки, окружающей миометрий, и/или других чувствительных анатомических структур, которые могут быть повреждены при проведении терапевтических процедур с подводом энергии, приведенных в настоящем описании.
В контексте настоящего описания область проведения терапии определяется границей терапии, рассчитываемой контроллером системы на основе конфигурации размещения игольной конструкции (либо задаваемой «стопорами», либо рассчитанной в режиме реального времени, когда игольная конструкция размещена), а также параметров подачи энергии, задаваемых контроллером системы или введенных в него. Энергия или другое терапевтическое воздействие, оказываемое игольной конструкцией, размещенной по выбранной схеме в выбранном местоположении, эффективно проводит лечение целевой ткани, чтобы выполнить абляцию или достичь других терапевтических результатов. Как описано ниже, желательно, таким образом, манипулировать зондом, а также стопором (стопорами) игольной конструкции и/или фактической игольной конструкцией так, чтобы область проведения терапии по меньшей мере частично охватывала анатомическую область, подвергаемую лечению, видимую на устройстве отображения изображения в реальном времени системы.
Кроме того, в контексте настоящего описания область безопасности определяется границей безопасности, рассчитываемой системой. Как и в случае области проведения терапии, граница безопасности рассчитывается на основе положений «стопоров» игольной конструкции и/или фактической игольной конструкции, которые были заданы или отрегулированы на терапевтическом зонде врачом, а также параметров подачи энергии, введенных в контроллер системы или установленных в нем. Граница безопасности будет отличаться от границы терапии тем, что граница безопасности устанавливается на минимальном пороговом расстоянии за границей области проведения терапии ткани, где риск повреждения ткани снижен или полностью исключен.
В первом аспекте настоящего изобретения способы для размещения игольной конструкции в ткани содержат позиционирование терапевтического зонда, имеющего размещаемую игольную конструкцию, вблизи поверхности подвергаемой лечению ткани, например, смежно со стенкой матки поверх миометрия матки. Получают изображение ткани в режиме реального времени, обычно используя визуализирующий преобразователь, такой как ультразвуковая матрица, которую несет терапевтический зонд, и проецируют на устройство отображения, соединенное с контроллером. Изображение в реальном времени включает в себя анатомическую структуру, подвергаемую лечению, такую как фиброид. По меньшей мере, область проведения терапии или область безопасности проецируется на изображение в реальном времени перед размещением игольной конструкции. Размер и/или положение границы области проведения терапии и/или области безопасности далее регулируется на изображении в реальном времени по-прежнему до размещения игольной конструкции. После того как границы области проведения терапии и/или область безопасности должным образом установлены на изображении в реальном времени относительно анатомической области, подвергаемой лечению, игольная конструкция может быть размещена из зонда в ткань для проведения лечения в пределах спроецированной границы лечения/безопасности, после того как граница отрегулирована.
Граница области проведения терапии и/или области безопасности может перемещаться и регулироваться различными способами. Во-первых, ручное перемещение зонда врачом приведет к тому, что изображение в режиме реального времени ткани и анатомической области, спроецированное на экран, переместится относительно границ лечения/безопасности, спроецированных на экран. Поскольку положение границы терапии и/или безопасности, спроецированной на экран, зависит от рассчитанного положения игольной конструкции, следует понимать, что перемещение самого зонда приведет к перемещению рассчитанного положения иглы в пределах изображения в реальном времени. В дополнение к такому общему перемещению терапевтического зонда в матке, положение области проведения терапии или безопасности, спроецированной на изображение в реальном времени, может регулироваться с помощью органов управления на зонде, например, путем позиционирования вручную стопорного элемента иглы, предусмотренного на зонде. Стопорный элемент иглы обеспечивает физический предел размещения по меньшей мере одной иглы игольной конструкции, так что когда игла в действительности размещена в ткани, игла будет точно располагаться в положении, задаваемом стопором иглы. Перед размещением положение самого стопор иглы отслеживается контроллером системы и используется для расчета положения границы терапии и/или безопасности.
В конкретных вариантах осуществления один или более датчиков на зонде отслеживают перемещение стопоров с целью переустановки и/или изменения размеров спроецированных границ. Например, на ручке наведения может быть предусмотрен поворотный датчик, так что при вращении ручки область проведения терапии расширяется или сужается, при этом зубчатая передача осуществляет поворот ходового винта, перемещающего стопор. Таким образом, датчики, связанные со стопорами, отслеживают спроецированную границу безопасности/терапии.
В качестве альтернативы в других вариантах осуществления положения и размеры границ терапии и/или безопасности могут регулироваться на контроллере и/или экране устройства отображения с использованием соответствующего интерфейса, такого как клавиатура, рычаг управления, манипулятор типа «мышь», сенсорная панель, сенсорный экран и т.п. После того как границы терапии и/или безопасности должным образом (виртуально) расположены на экране, контроллер может управлять размещением игольной конструкцией на терапевтическом зонде. Например, контроллер может приводить в действие серводвигатели на зонде для позиционирования стопоров игл/игольных элементов или может напрямую расположить иглы/игольные элементы, не используя стопорных конструкций.
В дополнение к стопору иглы зонд обычно также имеет стопор игольных элементов, определяющий, до какой степени множество игольных элементов могут продвигаться из иглы. В то время как настоящее раскрытие относится в общем к одному стопору игольных элементов, в других вариантах осуществления может применяться множество стопоров игольных элементов, при этом отдельные игольные элементы могут индивидуально управляться либо управляться группами, в которые входят не все игольные элементы. Стопор игольных элементов выполнен с возможностью управления контроллером системы, так что контроллер может рассчитать размер границы терапии или безопасности, когда стопор игольных элементов отрегулирован. Кроме того, когда требуемые положение и размер границ терапии и/или безопасности определены, стопор игольных элементов будет работать на ограничение перемещения игольных элементов, так чтобы они физически размещались по схеме, обеспечивающей проведение терапии в пределах требуемых границ терапии/безопасности, когда через игольную конструкцию подается энергия.
После того как стопор иглы и стопор игольных элементов установлены и игольная конструкция продвинулась в ткань до пределов, заданных стопорами, через игольную конструкцию может подаваться энергия для лечения ткани. Разумеется, энергия будет подаваться с учетом той мощности терапевтической обработки и/или продолжительности проведения терапии, которые были использованы для расчета границ области проведения терапии и/или области безопасности. В некоторых вариантах осуществления контроллер может регулировать положение или размер границ терапии или безопасности на основе мощности, времени и/или других параметров терапии (в дополнение к положению игл/игольных элементов), выбранных врачом. Таким образом, положения игл/игольных элементов и мощность, а также продолжительность подачи энергии принимаются во внимание для расчета положения или размера границ терапии или безопасности. В качестве альтернативы посредством размещения игольной конструкции может осуществляться введение препаратов, морцелляции ткани и проведение других терапевтических процедур.
При необходимости информация о виртуальном местоположении иглы может проецироваться на изображение в реальном времени в процессе регулировки положения и/или размера границ терапии и/или безопасности. Например, информация о местоположении иглы может содержать множество реперных меток или маркеров, спроецированных на изображение в реальном времени для обозначения спроецированных положений кончиков игл, или другую информацию о положении иглы. В других случаях существует возможность спроецировать полные изображения игл по всей длине по мере их перемещения через ткань (но до действительного размещения). Разумеется, информацию о местоположении игл предпочтительно корректировать, когда стопоры зонда устанавливаются и позволяют врачу видеть, где игла будет находиться после размещения иглы.
В другом аспекте настоящего изобретения система для лечения анатомической структуры в ткани содержит устройство отображения изображения в реальном времени, терапевтический зонд, а также позиционируемую стопорную конструкцию на терапевтическом зонде. Терапевтический зонд несет размещаемую игольную конструкцию и визуализирующий преобразователь, при этом преобразователь является соединяемым с устройством отображения изображения в реальном времени. Стопорная конструкция фиксации положения на зонде (1) управляет по меньшей мере одним из положения и размера области проведения терапии или безопасности, спроецированной на устройство отображения изображения в реальном времени, а также (2) физически ограничивает размещение игольной конструкции, так что последующее лечение ткани выполняется в пределах области проведения терапии и/или безопасности.
Типовая игольная конструкция содержит иглу, а также множество игольных элементов, которые могут продвигаться из иглы. Игольные элементы принимают расходящуюся в дистальном направлении форму, когда выдвинуты из иглы, при этом стопорная конструкция обычно содержит стопорный элемент иглы, а также отдельный стопорный элемент игольных элементов. Стопорный элемент иглы по меньшей мере частично управляет положением области проведения терапии или безопасности, спроецированной на устройство отображения изображения в реальном времени, а стопорный элемент игольных элементов по меньшей мере частично управляет размером области проведения терапии или безопасности, спроецированной на устройство отображения изображения в реальном времени.
Системы для проведения терапии при необходимости могут дополнительно содержать контроллер, соединяемый с зондом для подачи энергии в игольную конструкцию, при этом система выполнена с возможностью управления спроецированным размером области проведения терапии или спроецированным размером области безопасности на основе уровня энергии, подаваемой контроллером, а также положения стопорных элементов, которое может отслеживаться датчиками на терапевтическом зонде.
В дополнительном аспекте настоящего изобретения система визуализации и введения терапевтического средства содержит визуализирующий компонент, содержащий визуализирующий стержень, имеющий проксимальный конец, дистальный конец, а также визуализирующий преобразователь на дистальном конце. Игольный компонент, содержащий игольный стержень, имеющий дистальный конец и проксимальный конец, а также игольную конструкцию, расположенную с возможностью возвратно-поступательного перемещения на стержне или внутри него, выполнен с возможностью съемно крепиться к визуализирующему стержню, при этом стержни расположены бок о бок, а их оси параллельны.
В конкретных примерах визуализирующий преобразователь на визуализирующем стержне шарнирно крепится на дистальном конце визуализирующего стержня, при этом дистальный конец игольного стержня расположен проксимально относительно шарнирно закрепленного визуализирующего преобразователя, когда игольный стержень прикреплен к визуализирующему стержню. Игольная конструкция в игольном стержне обычно совершает возвратно-поступательное перемещение дистально вдоль оси игольного стержня, при этом визуализирующий преобразователь совершает шарнирный поворот от оси игольного стержня, когда игольный стержень прикреплен к визуализирующему стержню. Визуализирующий компонент может дополнительно содержать визуализирующую секцию рукоятки, прикрепленную к проксимальному концу визуализирующего стержня, при этом игольный компонент может дополнительно содержать игольную секцию рукоятки, прикрепленную к проксимальному концу игольного стержня. В таких вариантах осуществления визуализирующая секция рукоятки и игольная секция рукоятки обычно образуют полную рукоятку, когда игольный стержень прикреплен к визуализирующему стержню. Визуализирующая секция рукоятки обычно имеет внутреннее пространство, вмещающее схему, выполненную с возможностью соединения визуализирующего преобразователя с внешним устройством отображения изображения и игольной секцией рукоятки, включающей в себя механизмы для продвижения игольной конструкции, при этом визуализирующая секция рукоятки обычно дополнительно содержит механизмы для шарнирного поворота визуализирующего преобразователя относительно визуализирующего стержня.
В еще одном аспекте настоящего изобретения способ размещения множества игольных элементов из иглы в ткани содержит создание изображения ткани в режиме реального времени, включающей анатомическую структуру, подвергаемую лечению, на устройстве отображения. Игла проникает в ткань проксимально относительно анатомической структуры, обычно в дистальном направлении, после чего игольные элементы размещаются из иглы дальше в ткань. Как и в предшествующих вариантах осуществления, игольные элементы обычно расходятся радиально по мере их продвижения дистально из иглы, чтобы увеличить объем подвергаемой лечению ткани. По меньшей мере, граница терапии или граница безопасности проецируется на устройство отображения в ответ на размещение игольных элементов. Протяженность размещения игольных элементов может регулироваться для изменения размера и/или формы границы терапии и/или безопасности, спроецированной на устройство отображения. В отличие от предшествующих вариантов осуществления врач имеет возможность расположить иглу и игольные элементы, ранее виртуально не спроецировав границы безопасности и/или терапии на изображение анатомической области. Вместо этого фактическое размещение иглы и игольных элементов может служить основанием для позиционирования и переустановки границ безопасности и/или терапии на изображении в реальном времени, пока врач не убедится в том, что последующее лечение будет безопасным и эффективным при использовании фактического размещения иглы и конфигурации игольных элементов. В дополнение к фактическому размещению иглы и игольных элементов, разумеется, спроецированные границы терапии и/или безопасности будут также зависеть от планируемой мощности и продолжительности проведения терапии, по аналогии с проекциями виртуальных границ, рассмотренными ранее. После того как установлен приемлемый размер и/или установлена граница безопасности, лечение может осуществляться посредством игольных элементов. В конкретных вариантах осуществления размещение игольных элементов может отслеживаться посредством датчиков в механизме размещения иглы/игольных элементов на зонде, используемом для размещения иглы и игольных элементов. В этих случаях внедрение иглы содержит продвижение иглы из зонда, введенного в ткань. Как правило, протяженность размещения иглы из зонда также служит основанием в определении спроецированных границ безопасности и/или терапии на устройстве отображения.
В дополнительных аспектах настоящего изобретения система для лечения анатомической структуры в ткани содержит устройство отображения в реальном времени, соединенное с контроллером. Система проецирует и регулирует размер по меньшей мере границы терапии или границы безопасности на устройстве отображения. Предусмотрен терапевтический зонд, имеющий размещаемую игольную конструкцию и визуализирующий преобразователь, который является соединяемым с контроллером и устройством отображения. Терапевтический зонд несет по меньшей мере один сервопривод, соединенный с контроллером и управляемый им. Контроллер выполнен с возможностью управления серводвигателем для расположения игольной конструкции с целью проведения терапии, являющейся эффективной в области, определяемой границей терапии, и не выходящей существенно за границу безопасности.
В конкретных вариантах осуществления системы игольная конструкция может содержать иглу, а также множество игольных элементов, продвигаемых из иглы и расходящихся в дистальном направлении. По меньшей мере, один серводвигатель может содержать первый серводвигатель, управляющий иглой, и второй серводвигатель, управляющий множеством игольных элементов. Система обычно содержит пользовательский интерфейс, выполненный с возможностью позволить пользователю виртуально регулировать размер и/или положение границы терапии и/или безопасности на устройстве отображения. В некоторых случаях, как описано ранее, интерфейс может находиться на самом терапевтическом зонде. В других случаях интерфейс может содержать более привычные клавиатуру, манипулятор типа «мышь», шаровой манипулятор, сенсорный экран, голосовое управление и т.п., подключенные к контроллеру, чтобы позволить пользователю виртуально расположить игольную конструкцию перед действительным позиционированием игольной конструкции. В других вариантах осуществления терапевтический зонд может содержать серводвигатели для позиционирования игольной конструкции и/или датчики для детектирования протяженности размещения игольной конструкции. В этих случаях пользователь может расположить игольную конструкцию, используя сервомеханизмы (не создавая виртуальной проекции границ безопасности и/или терапии), и наблюдать спроецированные границы безопасности и/или терапии в том виде, как они рассчитаны и проецированы контроллером системы. Во всех случаях система может использоваться для подачи энергии или других терапевтических средств только после подтверждения того, что размещение игольной конструкции отвечает требованиям соответствия границам безопасности и/или терапии.
Все публикации, патенты и заявки на патенты, упомянутые в данном описании, включены в него путем ссылки в полном объеме.
Краткое описание чертежей
На Фиг. 1 схематично показана система по настоящему изобретению, содержащая контроллер системы, устройство отображения изображения, а также терапевтический зонд, имеющий размещаемую игольную конструкцию и визуализирующий преобразователь.
На Фиг. 2 показан вид в перспективе терапевтического зонда по настоящему изобретению.
На Фиг. 3 показан вид терапевтического зонда, представленного на Фиг. 2, иллюстрирующий визуализирующий компонент зонда, отделенный от игольного компонента, при этом некоторые участки не показаны, а некоторые участки показаны в увеличенном виде.
На Фиг. 3A показан дистальный конец игольного компонента, соединенный с дистальным концом визуализирующего компонента.
На Фиг. 4A-4F показаны внутренние механизмы компонента размещения иглы зонда, включающего в себя корпус стопора иглы и каретку иглы, показывающие, как механизмы работают, чтобы разместить игольную конструкцию.
На Фиг. 5A и 5B показан механизм блокировки, не допускающий размещения игольной конструкции до отклонения матрицы формирования изображения на визуализирующем компоненте зонда.
На Фиг. 6A и 6B показана зубчатая передача, установленная на корпусе стопора иглы, используемая для размещения иглы, а также множества игольных элементов игольной конструкции.
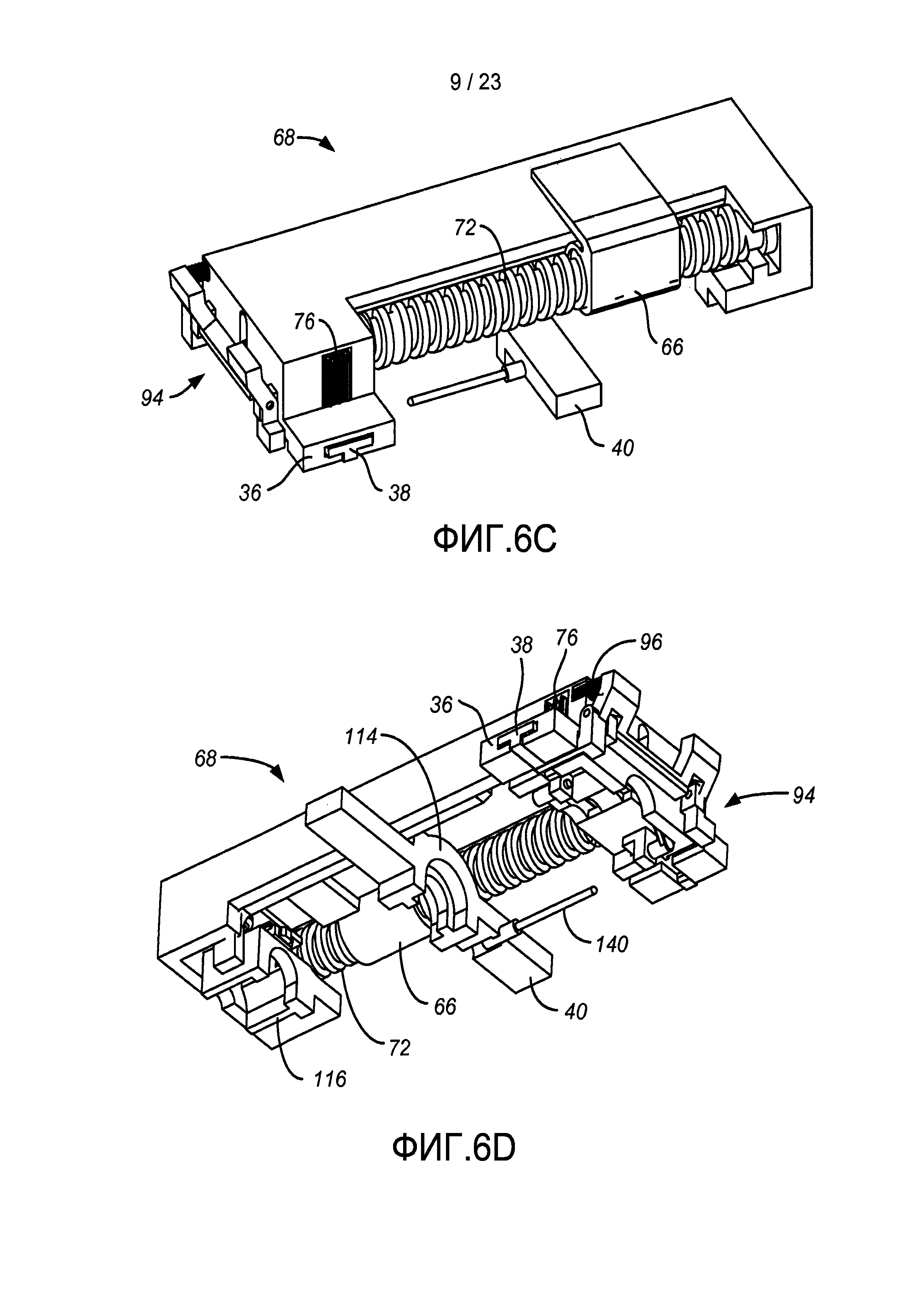
На Фиг. 6C и 6D показаны детали каретки иглы.
На Фиг. 7A-7C показано относительное перемещение каретки иглы и корпуса стопора иглы.
На Фиг. 8 показан вид снизу каретки иглы.
На Фиг. 9 показан дистальный участок терапевтического зонда, введенного в полость матки для отображения фиброида в миометрии.
На Фиг. 10A-15A показаны снимки экрана устройства отображения изображения в реальном времени по мере регулировки границ терапии и безопасности с использованием терапевтического зонда согласно принципам настоящего изобретения.
На Фиг. 10B-15B показана манипуляция ручкой, соответствующая повторному позиционированию спроецированных изображений границ терапии и безопасности на изображения в реальном времени, представленные на Фиг. 10A-15A.
На Фиг. 16A-16D показано создание реперных меток или маркеров на изображении в реальном времени, при этом реперные метки или маркеры соответствуют местоположениям кончика иглы.
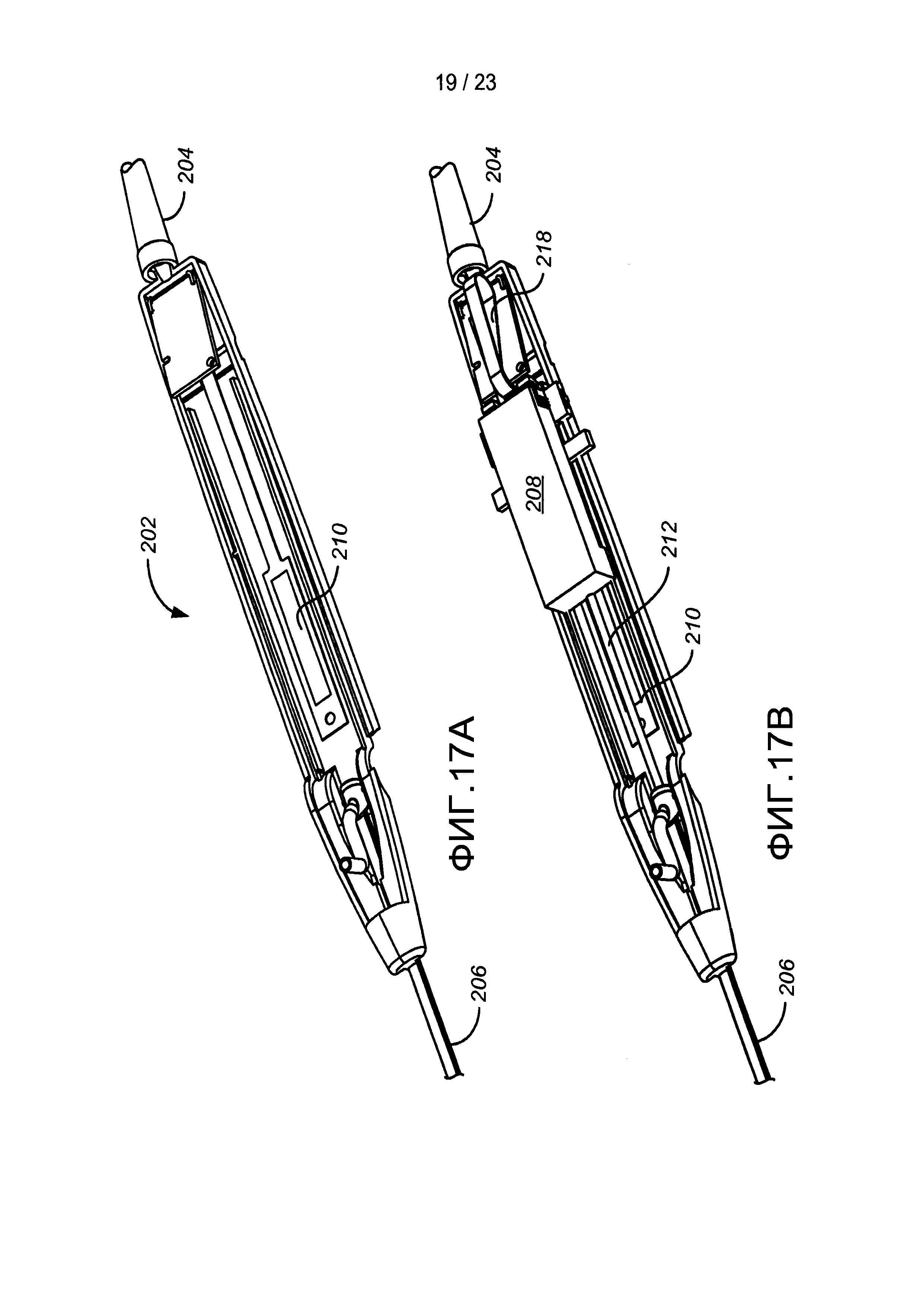
На Фиг. 17A-17C показана альтернативная конструкция корпуса иглы по настоящему изобретению, имеющая датчики для детектирования положений каретки иглы и скользящей опоры игольных элементов при их позиционировании для размещения иглы и игольных элементов соответственно.
На Фиг. 18A и 18B показан дополнительный альтернативный вариант осуществления корпуса иглы по настоящему изобретению, в котором применяются серводвигатели и приводные винты для позиционирования каретки иглы и скользящей опоры игольных элементов.
На Фиг. 19 показана схема системы, в которой данные ультразвукового изображения в реальном времени служат основанием для определения положений игольных конструкций по настоящему изобретению.
На Фиг. 20 показана схема системы, в которой внешние данные по отслеживанию иглы используются для отслеживания положения иглы.
Осуществление изобретения
Как показано на Фиг. 1, система 10, построенная согласно принципам настоящего изобретения, включает в себя контроллер 12 системы, устройство 14 отображения изображения, а также терапевтический зонд 16. Контроллер 12 системы обычно представляет собой контроллер на базе микропроцессора, позволяющий установить параметры терапии и параметры визуализации традиционным способом. Устройство 14 отображения обычно находится в общем корпусе 18 с контроллером 12, но также может быть предусмотрено в отдельном корпусе. Терапевтический зонд 16 включает в себя визуализирующий преобразователь 20, соединенный с контроллером 12 кабелем 24 обеспечения визуализации. Контроллер 12 подает мощность на терапевтический зонд через кабель 22 обеспечения проведения терапии. Контроллер 12 обычно дополнительно включает в себя интерфейс для лечащего врача с целью ввода информации в контроллер, например клавиатуру, сенсорный экран, панель управления и т.п. При необходимости сенсорная панель может быть частью устройства 14 отображения изображения. Энергия, подаваемая в терапевтический зонд контроллером, может представлять собой радиочастотную (RF) энергию, микроволновую энергию, энергию плазмы, используемую в терапевтических целях, тепло, холод (криогенная терапия), или любое другое традиционное средство лечения, обусловленное энергией. В качестве альтернативы или дополнительно терапевтический зонд может быть выполнен с возможностью введения препаратов или других лекарственные веществ в анатомическую структуру ткани, подвергаемую лечению. В некоторых вариантах осуществления зонд 16 подключается к ультразвуковой системе и отдельному радиочастотному (RF) генератору. Магистраль интерфейса соединяет ультразвуковую систему и RF-генератор.
Как показано на Фиг. 2 и 3, терапевтический зонд 16 содержит игольный компонент 26 и визуализирующий компонент 28. Игольный компонент и визуализирующий компонент выполнены в виде отдельных блоков или узлов, которые могут съемно крепиться друг к другу для эксплуатации. После их использования игольный компонент может быть отделен и обычно утилизируется, в то время как визуализирующий компонент стерилизуется для повторного использования. Терапевтический зонд 16 показан в полностью собранном виде на Фиг. 2 и в разобранном виде на Фиг. 3. В других вариантах осуществления настоящего изобретения игольный компонент и визуализирующий компонент могут быть объединены в одном интегрированном блоке рукоятки.
Игольный компонент 26 содержит участок 27 рукоятки, имеющий установленную с возможностью скольжения ручку 30 наведения на своей верхней поверхности. Ручка 30 наведения управляет позиционированием внутренних стопоров в ручке, мониторинг которых осуществляется контроллером 12 (Фиг. 1) для расчета размера и положения границ целевой области и/или области безопасности, показанных на устройстве 14 отображения. Стопоры также случат для физического ограничения размещения иглы 56 и при необходимости игольных элементов 57, как будет подробнее описано ниже.
Игла 56 размещается из игольного стержня 34, при этом игла и дополнительные игольные элементы вместе образуют игольную конструкцию, которая может быть построена, например, как описано ранее в патентах США №№8,206,300 и 8,262,574, полное содержание которых включено в настоящее описание путем ссылки.
Участок 27 рукоятки игольного компонента 26 дополнительно включает в себя порт 32 для инжекции текучей среды, позволяющий вводить солевой раствор или другие текучие среды через игольный стержень 34 в целевую область в подвергаемой лечению ткани, например матки. Ручка 27 иглы также включает в себя скользящую опору 36 иглы, механизм 38 высвобождения иглы, а также скользящую опору 40 игольных элементов, используемые для размещения иглы 56 и игольных элементов 57, как будет подробнее описано ниже. Кабель 24 обеспечения визуализации крепится на проксимальном конце участка 27 рукоятки визуализирующего компонента 28 для соединения с контроллером 12, как описано ранее.
Визуализирующий компонент 28 содержит участок 29 рукоятки и визуализирующий стержень 44. Отклоняющий рычаг 46 на участке 29 рукоятки может отводиться назад, чтобы отклонить вниз визуализирующий преобразователь 20, как показано штриховой линией на Фиг. 3. Рычаг 48 высвобождения игольного компонента соединен с парой замков 50, входящих в зацепление с крюками 52 на нижней поверхности участка 27 рукоятки игольного компонента 26. Игольный компонент 26 может съемно крепиться к визуализирующему компоненту 28 первоначально путем захвата пары крыльев 58 (только одно из которых показано на Фиг. 3) на игольном стержне 34 под крюками 60 на визуализирующем стержне 44, как показано на Фиг. 3A. После этого нижняя поверхность участка 27 рукоятки иглы может быть помещена на верхнюю поверхность визуализирующего участка 29 рукоятки, так чтобы крюки 52 вошли в зацепление с замками 50 для образования полного узла терапевтического зонда 16, при этом участки рукоятки вместе образуют полную рукоятку, предназначенную для использования при проведении процедуры. После эксплуатации рычаг 48 высвобождения игольного компонента можно оттянуть, чтобы высвободить крюки 52 из замков 50, что позволяет отделить участки 27 и 29 рукоятки.
В процессе эксплуатации, как будет подробнее описано ниже, ручка 30 наведения используется для позиционирования (переноса) и регулировки размера виртуальной области проведения терапии, проецируемой на устройство 14 отображения системы 10. Ручка 30 может перемещаться дистально и проксимально в пазу на верхней поверхности участка 27 рукоятки для переноса положения области проведения терапии/безопасности на изображении, при этом ручка может также совершать вращение для регулировки размера границы области проведения терапии/безопасности. Скольжение и вращение ручки 30 регулируют также положение механических стопоров на участке 27 рукоятки, ограничивающих размещение иглы 56 и игольных элементов 57, так что после того как виртуальные границы области проведения терапии/безопасности выбраны на изображении в реальном времени, игла и игольные элементы могут автоматически продвигаться в соответствующие положения размещения путем перемещения скользящей опоры 36 иглы и скользящей опоры 40 игольных элементов, пока их перемещение не будет остановлено стопорами. Положение области проведения терапии/безопасности также зависит от местоположения, в котором врач удерживает терапевтический зонд 16 в пределах целевой ткани. Таким образом, продвижение иглы и игольных элементов с использованием скользящих опор 36 и 40 приведет к должному размещению иглы и игольных элементов в пределах целевой ткани только в том случае, если положение терапевтического зонда сохраняется неизменным с момента установки стопоров до завершения продвижения иглы/игольных элементов. В предпочтительных вариантах осуществления поворот ручки 30 также определяет продолжительность подачи и/или мощность в процессе выполнения протокола лечения. Таким образом, ручка может использоваться для виртуального установления размера области проведения терапии/безопасности на основе не только степени продвижения игольных элементов, но также количества энергии, подаваемой в целевую ткань.
На Фиг. 4A-4F конструкция участка 27 рукоятки иглы и его внутренних компонентов описана подробнее. Следует отметить, что ориентационное положение игольного компонента 26 является обратным по отношению к тому, которое показано на Фиг. 2 и 3, так что игольный стержень 34 продолжается вправо на Фиг. 4A-4F, а не влево, как показано на Фиг. 2 и 3. На Фиг. 4A-4F участок 27 рукоятки игольного компонента 26 показан с частично снятым верхним участком. Корпус 64 стопора иглы установлен с возможностью скольжения в корпусе, при этом стержень 31 ручки 30 перемещается в пазу 33 (Фиг. 2) при поступательном перемещении корпуса 64.
Каретка 68 иглы также установлена с возможностью скольжения в корпусном участке 27 и несет на себе стопор 66 игольных элементов, установленный на ходовом винте 72. Ручка 30 соединена с ходовым винтом 72 с помощью зубчатой передачи 71, поворачивающей приводной стержень 70, вставленный с возможностью скольжения в ходовой винт 72. Приводной стержень 70 имеет асимметричное сечение, входящее внутрь и выходящее наружу путем скольжения из сопряженного прохода, совмещенного в осевом направлении в ходовом винте 72. Таким образом, ручка 30 может использоваться для вращения ходового винта вне зависимости от относительных осевых положений корпуса 64 стопора иглы и каретки 68 иглы.
Как будет подробнее показано ниже, терапевтический зонд 16 имеет ряд блокировочных элементов, не допускающих случайной активации стопоров, иглы и игольных элементов, а также требующих, чтобы расположение стопоров и активация иглы/игольных элементов выполнялись в соответствующем порядке. В качестве части такой блокировочной системы на боковой стороне корпуса 64 стопора иглы предусмотрены собачки 74, так что собачки 74 входят в зацепление с зубчатой рейкой 132 (Фиг. 8) внутри участка 27 рукоятки корпуса, чтобы не допустить перемещения корпуса 64 стопора иглы, пока собачки не выйдут из зацепления. Собачки выводятся из зацепления путем нажатия ручки 30, что позволяет ручке перемещаться дистально и проксимально на участке 27 рукоятки для переустановки корпуса 64 стопора иглы на корпусном участке 27. Когда ручка отпускается, собачки 74 повторно входит в зацепление, блокируя корпус 64 стопора иглы на месте относительно участка 27 рукоятки.
Аналогичным образом на каретке 68 иглы созданы собачки 76 (Фиг. 4A и 4B). Эти собачки также входят в зацепление с зубчатой рейкой 134 (Фиг. 8) внутри корпуса участка 27 рукоятки. Собачки 76 в норме введены в зацепление, блокируя каретку 68 на месте, но могут выводиться из зацепления путем нажатия на T-образный механизм 38 высвобождения, позволяя протолкнуть каретку вперед, чтобы дистально продвинуть иглу 56, проксимальный конец (не показан) которой установлен на каретке. Игольные элементы 57 продвигаются из иглы 56 с помощью скользящей опоры 40 игольных элементов, как будет описано ниже.
Как показано на Фиг. 4B, положения корпуса 64 стопора иглы и стопора 66 игольных элементов распознаются датчиком 78 положения иглы и датчиком 80 положения игольных элементов соответственно. Эти датчики обычно представляют собой реостаты, в которых изменение положения приводит к изменению сопротивления, распознаваемому контроллером 12, однако другие устройства обратной связи по абсолютному положению, такие как датчики на основе линейно-регулируемого дифференциального трансформатора (LVDT), импульсные датчики положения и т.п., также могут использоваться. Таким образом, перед размещением иглы или игольных элементов положения корпуса 64 стопора иглы и стопора 66 игольных элементов могут отслеживаться в режиме реального времени контроллером 12, а рассчитанные границы терапии и/или безопасности отображаться на блоке 14 отображения, по мере того как положение корпуса стопора иглы регулируется и ручка 30 совершает вращение для регулировки положения стопора игольных элементов. Разумеется, фактические положения стопоров также могут быть визуально или в цифровой форме показаны на устройстве 14 отображения. Перед каким бы то ни было действительным размещением иглы и игольных элементов врач будет обладать визуальной информацией, подтверждающей границы области проведения терапии/безопасности, которые станут результатом размещения иглы/игольных элементов, заложенного в терапевтический зонд путем регулировки стопоров иглы и игольных элементов.
Особое преимущество данного способа и системы заключается в том, что врач может манипулировать границами терапии/безопасности по целевой анатомической структуре либо путем перемещения границ относительно (или в пределах) изображения в реальном времени с помощью манипулирования (скольжения и поворота) ручкой 30, либо путем перемещения всего изображения в реальном времени относительно целевой анатомической структуры с помощью манипулирования всем терапевтическим зондом 16, чтобы получить границу терапии по опухоли и удерживать границу безопасности на удалении от чувствительной анатомической области. Таким образом, прежде чем врач продвинет какие-либо иглы в ткань пациента, он может заранее убедиться, используя интерфейс виртуального наведения, что абляция будет эффективной и безопасной.
Как показано на Фиг. 4A, для виртуального позиционирования границ областей проведения терапии/безопасности, ручка 30 наведения может быть нажата, после чего перемещена дистально по направлению стрелки 84, достигая положения, показанного на Фиг. 4C. Разумеется, врач может перемещать корпус стопора иглы как дистально, так и проксимально, при условии, что ручка 30 нажата, пока граница области проведения терапии/безопасности должным образом не будет расположена так, как показано на устройстве 14 отображения. После достижения должного расположения ручка 30 частично отжимается для выведения из зацепления блокиратора 110 поворота (Фиг. 6B), после чего ручку можно вращать, как показано стрелкой 86, для позиционирования стопора 66 игольных элементов. Точнее говоря, вращение ручки 30 приводит к повороту приводного стержня 70 посредством зубчатой передачи 71. Приводной стержень, в свою очередь, вращает ходовой винт 72, перемещающий стопор 66 игольных элементов дистально, как показано стрелкой 88 на Фиг. 4D. Разумеется, ручка 30 может поворачиваться в обоих направлениях с целью переустановки стопора 66 игольных элементов дистально или проксимально, при этом переустановка приводит соответственно к расширению или сокращению «виртуальной» границы, спроецированной на устройство 14 отображения (Фиг. 4D). После того как корпус 64 стопора иглы и стопор 66 игольных элементов заняли требуемые положения (на основе виртуальных или спроецированных изображений границы терапии/безопасности на устройстве 14 отображения), лечащий врач может далее физически продвинуть иглу и игольные элементы в положения, заданные корпусом стопора иглы и стопором игольных элементов. Как показано на Фиг 4D, механизм 38 высвобождения иглы проталкивается внутрь для выведения из зацепления собачки 76 и позволяет каретке 68 иглы перемещаться по направлению стрелки 88. Каретка 68 иглы продвигается до соударения с корпусом 64 стопора иглы, как показано на Фиг 4E. Такое перемещение каретки иглы, в свою очередь, дистально продвигает иглу 56, как показано штриховой линией на Фиг. 3.
После того, как игла 56 продвинута, игольные элементы 57 могут быть продвинуты путем проталкивания вручную скользящей опоры 40 игольных элементов дистально, пока скользящая опора 40 игольных элементов не столкнется со стопором 66 игольных элементов, как показано стрелкой 90 на Фиг. 4E. После того как скользящая опора 40 расположилась дистально, как показано на Фиг. 4F, игла 56 и игольные элементы 57 будут размещены, как показано на Фиг. 3. В этот момент контроллер 12 определяет, что игла 56 и игольные элементы 57 полностью выдвинулись, после чего врач убеждается в том, что абляция будет выдержана по размеру и проведена в безопасном и эффективном месте. Запорный рычаг 120 скользящей опоры игольных элементов высвобождает скользящую опору 40 игольных элементов, когда каретка 68 иглы входит в зацепление с корпусом 64 стопора. Таким образом, переключатель на стопоре 66 игольных элементов может активироваться, только если скользящая опора 40 игольных элементов была сначала высвобождена, когда каретка 68 иглы вошла в зацепление с корпусом 64 стопора, при этом одиночный микропереключатель 112 указывает, что игла 56 и игольные элементы находятся в своих надлежащих положениях.
На Фиг. 5A и 5B даны пояснения в отношении блокировочного узла для предотвращения перемещения каретки 68 иглы до отклонения преобразователя 20 изображения (Фиг. 2 и 3). Рычаг 46 отклонения преобразователя первоначально протолкнут вперед, как показано на Фиг. 5A, где преобразователь 20 пребывает в своей совмещенной в осевом направлении конфигурации, показанной на Фиг. 2 и 3. Следует понимать, что продвижение иглы, пока преобразователь 20 совмещен с осью, вероятно, повредит преобразователь. Чтобы избежать такого повреждения, по мере отведения назад рычаг 46 входит в зацепление с четырехштанговым звеном 92, соединенным с угловым фиксатором 94, не допускающим перемещения каретки 68 иглы. Однако когда рычаг 46 оттягивается проксимально для отклонения преобразователя 20 (как показано штриховой линией на Фиг. 3), четырехштанговое звено может складываться и выходить из зацепления с угловым фиксатором 94, как показано на Фиг. 5B. При таком положении каретка 68 иглы может свободно продвигаться вперед и отводиться назад. В других вариантах осуществления четырехштанговое звено может быто заменено на рычажную или поворотную балку.
Детали зубчатой передачи, позволяющей ручке 30 приводить во вращение приводной стержень 70, показаны на Фиг. 6A и 6B. Ручка крепится к коническому зубчатому колесу 100, приводящему во вращение прямозубое/коническое зубчатое колесо 102, которое, в свою очередь, приводит в движение прямозубую шестерню 104, прикрепленную к приводному стержню 70. Нажатие ручки 30 приводит к отводу собачек 74 посредством взаимодействия с установочным пальцем 108, который перемещается вверх-вниз ручкой 30 и заходит в пазы или каналы на поверхностях собачек. Предусмотрен блокиратор 110 поворота, который входит в зацепление с коническим зубчатым колесом, чтобы не допустить поворота ручки. Предусмотрен микропереключатель 112, подающий сигнал в контроллер, когда блокиратор 110 поворота и собачки 74 введены в зацеплении.
На Фиг. 6C и 6D описаны дополнительные детали каретки 68 иглы. На Фиг. 6C показан вид сверху каретки 68 иглы, в общем то, что показано на предшествующих чертежах. На Фиг. 6D показан вид снизу каретка иглы, где показаны детали, которые ранее не были видны. Угловой фиксатор 94 поступательно перемещает рычаг 96, который позволяет или не позволяет привести в действие механизм 38 высвобождения иглы. Как показано на Фиг. 6D, угловой фиксатор 94 находится в зацепленном состоянии (показанном на Фиг. 5A). Путем отвода рычага 46 (Фиг. 5B) угловой фиксатор 94 выводится из зацепления, чтобы отвести рычаг 96 для обеспечения отжатия механизма 38 высвобождения иглы. Механизм 38 высвобождения иглы, в свою очередь, отводит собачки 76, которые выходят из зацепления с запорными зубьями 134 на участке 27 рукоятки.
Скоба 114 на скользящей опоре 40 игольных элементов входит в зацепление со стержнем (не показан), который продвигает игольные элементы в игле, как будет описано ниже. Аналогичным образом скоба 116, закрепленная на каретке 68 иглы, входит в зацепление с проксимальным концом иглы (на Фиг. 6D не показан), который продвигает иглу по мере продвижения каретки.
На Фиг. 6D показана одна дополнительная блокировка. Подпружиненный плунжер 140 выступает от задней стороны скользящей опоры 40 игольных элементов. Когда скользящая опора 40 игольных элементов поджимается к скользящей опоре 36 иглы, (т.e. когда игольные элементы не развернуты), подпружиненный плунжер 140 приводит в действие угловой фиксатор 94 и вводит в зацепление рычаг 96, чтобы заблокировать механизм 38 высвобождения иглы. Когда скользящая опора 40 игольных элементов отводится от скользящей опоры 36 иглы, плунжер 140 выводит из зацепления угловой фиксатор 94, и рычаг 96 деблокирует механизм 38 высвобождения иглы. Разумеется, могут использоваться другие механизмы блокировки. Например, скользящая опора 40 игольных элементов может входить в зацепление с простым рычагом, который напрямую взаимодействует с механизмом 68 высвобождения иглы без использования подпружиненного плунжера 140.
На Фиг. 7A-7C описан механизм для избирательного блокирования скользящей опор 40 игольных элементов перед продвижением каретки 68 иглы. Запорный рычаг 120 игольных элементов закреплен посредством шарнира 122 на боковой стороне каретки 68 иглы, как показано на Фиг. 7A. Боковая консоль 124 запорного рычага 120 выполнена с возможностью вхождения в зацепление со штангой 126, закрепленной на конце корпуса 64 стопора иглы, который входит в зацепление с кареткой иглы, когда каретка иглы полностью продвинута вперед. Когда каретка 68 иглы продвинута дистально (влево на Фиг. 7A и 7B) для размещения иглы, штанга 126 на корпусе 64 стопора иглы входит в зацепление с боковой консолью 124 на запорном рычаге 120 игольных элементов. Такое зацепление приводит к тому, что запорный рычаг совершает поворот в направлении против часовой стрелки, тем самым приподнимая блокировочный конец 128 штанги, переводя из зацепленной конфигурации (Фиг. 7A) в незацепленную конфигурацию (Фиг. 7B), так что скользящая опора 40 игольных элементов может выдвигаться дистально только после того, как каретка иглы полностью продвинута вперед. Таким образом, случайное, преждевременное размещение игольных элементов можно предотвратить.
Специалисту в данной области техники понятно, что существует много способов создания блокировок, контролирующих порядок размещения компонентов терапевтического зонда. Например, штанга 126 может быть встроена на стороне 124, а не 64. Блокировка 120 может иметь конструкцию листовой пружины, так что ее работа не будет основана на силе тяжести для зацепления блокировочного конца 128 со скользящей опорой 40 игольных элементов.
На Фиг. 7B и 7C показано, как рычаг 96 углового фиксатора 94 поднимается, чтобы заблокировать механизм 38 высвобождения иглы с целью предотвращения случайного размещения иглы.
Как показано на Фиг. 8, на внутренней поверхности корпусного участка 27 игольного компонента 26 терапевтического зонда 16 образованы внутренние зубья 132 и 134. Зубья 132 избирательно входят в зацепление с собачками 74, расположенными на корпусе 64 стопора иглы, как описано ранее. Зубья 134 избирательно входят в зацепление с собачками 76 (на Фиг. 8 не показано), находящимися на каретке 68 иглы.
Как показано на Фиг. 9, система 10 по настоящему изобретению может использоваться для лечения фиброида F, расположенного в миометрии M в матке U под стенкой матки UW (эндометрием) и окруженного серозной оболочкой стенки SW. Терапевтический зонд 16 может вводиться трансвагинально и трансцервикально (либо, в качестве альтернативы, лапароскопически) в матку, после чего визуализирующий преобразователь 20 может размещаться для визуализации фиброида в поле обзора, обозначенном пунктирными линиями.
После того, как фиброид обнаружен на устройстве 14 отображения, как показано на Фиг. 10A, органы управления на ручке используются для определения места и размера границы TB терапии и границы SB безопасности. Первоначально, как показано на Фиг. 10A, виртуальные линии границ TB и SB ни проходят за фиброид, ни отрегулированы должным образом по размеру для лечения фиброида. Перед действительным размещением иглы и игольных элементов врач пожелает определить положение и размер границ TB и SB для проведения должного лечения. Поскольку визуализирующий преобразователь 20 уже расположен вплотную к стенке матки UW, единственный способ продвижения границ терапии и безопасности заключается в перемещении границ вперед путем нажатия ручки 30 наведения, как показано на Фиг. 10B, а затем дистального продвижения ручки, как показано на Фиг. 11B. Это приведет к перемещению границ TB и SB терапии и безопасности вперед вдоль осевой линии AL. Это заставляет виртуальные границы на устройстве 14 отображения изображении в реальном времени переместиться по изображению фиброида, как показано на Фиг. 11A.
Однако, как показано на Фиг. 11A, размер границы TB терапии неудовлетворителен для лечения фиброида, поскольку граница не распространяется за изображение фиброида. Таким образом, необходимо увеличить границу TB терапии путем вращения ручки 30 наведения, как показано на Фиг. 12B. Это увеличивает как границу TB терапии, так и границу SB безопасности, как показано на Фиг. 12A. В то время как увеличенная виртуальная граница TB терапии теперь достаточна для лечения фиброида, граница SB безопасности продлилась за серозную оболочку стенки SW, что также показано на Фиг. 12A. Таким образом, существует риск того, что лечение затронет более чувствительную ткань, окружающую матку, и необходимо отвести назад виртуальную границу SB безопасности, вращая ручку 30 наведения в обратном направлении, как показано на Фиг. 13B. Это уменьшает размер границ SB и TB безопасности и лечение, как показано на Фиг. 13A, при этом врач убеждается в том, что лечение будет эффективным, поскольку граница TB терапии полностью охватывает фиброид на устройстве отображения изображения в реальном времени, и что лечение будет безопасным, поскольку граница SB безопасности расположена в пределах миометрия M и не пересекает серозную оболочку стенки SW на устройстве отображения изображения в реальном времени. Кроме того, хирург знает, что стопоры в терапевтическом зонде теперь установлены должным образом для размещения иглы и игольных элементов, чтобы достичь результата лечения, показанного виртуальными границами на Фиг. 13A.
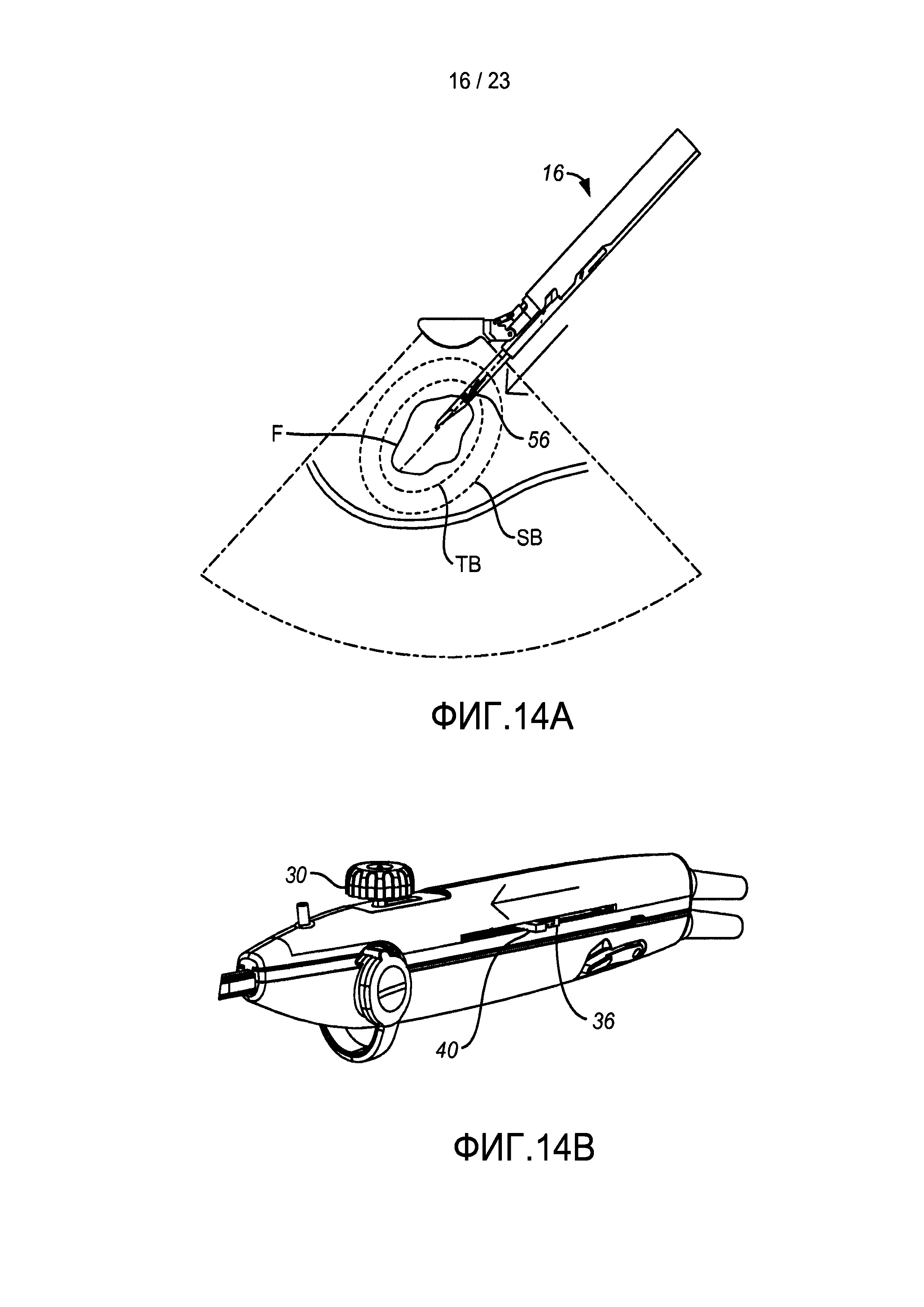
Твердо удерживая терапевтический зонд 16, врач далее продвигает скользящую опору 36 иглы (после отжатия механизма высвобождения), как показано на Фиг. 14B, заставляя иглу 56 углубиться в фиброид F, как показано на Фиг. 14A. На Фиг. 14A показан терапевтическом зонде 16, соответствующий физическому зонду, введенному пациенту. Остальная часть Фиг. 14A соответствует изображению, представленному на устройстве 14 отображения цели.
После того как игла 56 полностью размещена в пределах, установленных корпусом 64 стопора иглы в терапевтическом зонде 16, игольные элементы 57 могут быть развернуты путем продвижения скользящей опоры 40 игольных элементов, пока она не войдет в зацепление со стопором 66 игольных элементов, как показано на Фиг. 15B. При необходимости терапевтический зонд 16 может быть повернут вокруг центральной оси (обычно совмещенной с осью иглы 56) для подтверждения границ терапии и безопасности во всех плоскостях обзора фиброида. Устройство 14 отображения покажет границы терапии и безопасности в режиме реального времени в отношении целевого фиброида и серозной оболочки. Затем игольные элементы принимают форму, показанную на Фиг. 15A, после чего на игольные элементы (и при необходимости иглу) может подаваться мощность, чтобы провести лечение в пределах границы, представленной виртуальной границей TB терапии. И снова на Фиг. 15A виртуальное изображение, выводимое на устройство 14 отображения, сочетается с физическим присутствием терапевтического зонда 16.
Как показано на Фиг. 16A-16D, контроллер 12 может быть выполнен с возможностью отображения реперных меток или маркеров на устройстве 14 отображения изображения, где реперные метки или маркеры представляют конкретные местоположения на «виртуальных» игле и/или игольных элементах. Например, как показано на Фиг. 16A, маркер 140 может представлять некоторое положение на игле 56, например, местоположение, из которого игольные элементы будут расходиться. Может быть создан дополнительный маркер 142, представляющий кончик иглы. Множество дополнительных маркеров 144 могут представлять кончики игольных элементов. Использование реперных меток или маркеров 142 и 144 помогают врачу убедиться в том, что действительные игла и игольные элементы размещены правильно. Врач должен иметь возможность видеть изображения в реальном времени действительной иглы и игольных элементов в процессе размещения, при этом соответствующие кончики должны перемещаться, пока кончик иглы не достигнет маркера 142, а кончики игольных элементов не дойдут до маркеров 144 (или, в качестве варианта, альтернативных мишеней на Фиг 16B-16D, как описано ниже).
Фиг. 16B схожа с Фиг. 16A, за исключением того, что реперные метки, представляющие кончики игольных элементов, изображены в виде дуг 146, представляющих диапазон возможных положений для дистального кончика каждого игольчатого элемента. Подобная дополнительная информация может быть полезной для врача при определении адекватности лечения и рисков с точки зрения безопасности. Как показано на Фиг. 16B, каждая дуга имеет радиус, равный теоретической длине размещения электрода. Как показано на Фиг. 16C, каждая из дуг 148 имеет одинаковый радиус, отмеренный от исходной точки, расположенной на кончике 142. Наконец, на Фиг. 16D дуги, показанные на Фиг. 16C, объединены в непрерывную дугу, предназначенную для более ясного визуального представления, используемого врачом.
Согласно описанию до настоящего момента, все проиллюстрированные варианты осуществления корпуса иглы включали в себя механизмы для размещения стопора иглы и стопора игольных элементов как для виртуальных изображений границ терапии и безопасности на экране устройства отображения, так и для последующего позиционирования действительных игл и игольных элементов в ткани пациента для проведения лечения. Альтернативный корпус 202 иглы, утилизируемый вместе со стопорами иглы и игольных элементов, показан на Фиг. 17A-17C. Корпус 202 иглы включает в себя кабель 204 обеспечения проведения терапии, а также игольный стержень 206, каждый из которых в общем имеет такую же конструкцию и служит тем же целям, что описаны в предшествующих вариантах осуществления, при этом корпус иглы может крепиться к визуализирующему корпусу 28 и сниматься с него, как описано в предшествующих вариантах осуществления. Каретка 208 иглы в корпусе 202 иглы и скользящая опора 214 игольных элементов в каретке 208 иглы (Фиг. 17C), наоборот, могут свободно позиционироваться пользователем и не ограничены стопорами или другими механизмами ограничения перемещения. Вместо этого, положение каретки 208 иглы отслеживается датчиком 210 положения каретки иглы в нижней части корпуса 202, как можно видеть на Фиг. 17A. Аналогичным образом скользящая опора 214 игольных элементов отслеживается посредством датчика 216 положения, расположенного на верхнем участке каретки 208 иглы, как можно видеть на Фиг. 17C.
Врач или другой пользователь может виртуально располагать границу терапии и/или границу безопасности на экране устройства отображения, используя интерфейс, отличный от ручки 30 управления, описанной в предшествующих вариантах осуществления. Например, границы терапии и/или безопасности можно располагать на экране устройства отображения с изображением в реальном времени анатомии матки, используя клавиатуру, манипулятор типа «мышь», шаровой манипулятор, сенсорный экран, голосовое управление или любой другой традиционный интерфейс, применяемый при работе с компьютером или другими устройствами отображения. Виртуальные границы терапии и/или безопасности устанавливаются относительно фактического положения игольного стержня 206, которое может отслеживаться системой, используя изображение стержня в ткани. Если врач удовлетворен размещением виртуальных границ терапии и/или безопасности, врач может далее вручную продвигать иглу, при этом контроллер системы осуществляет мониторинг продвижения посредством датчика 210 в корпусе 202 иглы. С помощью визуального, акустического или иного средства система может предупредить врача, когда игла продвинута на соответствующее расстояние. После блокирования иглы пользователь далее может вручную продвигать игольные элементы, при этом контроллер осуществляет мониторинг их положения посредством датчика 216. Система опять же предупредит врача, когда игольные элементы размещены в должной мере в пределах виртуальных границ терапии и/или безопасности. После этого система может известить врача о том, что можно начинать лечение.
Еще один альтернативный вариант осуществления корпуса 230 иглы показан на Фиг. 18A и 18B. Корпус 230 иглы опять же включает в себя кабель 232 обеспечения проведения терапии и игольный стержень 234, которые в общем те же, что и описанные во всех предшествующих вариантах осуществления. Носитель 236 иглы, однако, отличается от предшествующих вариантов осуществления тем, что он управляется приводным винтом 240, который, в свою очередь, приводится в движение серводвигателем 242. Серводвигатель управляется контроллером 12 системы на основе информации, связанной с границами области проведения терапии и/или области безопасности, которые могут устанавливаться любым из способов, описанных ранее.
Аналогичным образом скользящая опора 244 игольных элементов приводится в движение приводным винтом 246 скользящей опоры игольных элементов, как можно видеть на Фиг. 18B. Приводной винт скользящей опоры игольных элементов, в свою очередь, приводится в движение серводвигателем 248 игольных элементов, который также приводится в действие и управляется контроллером системы. Носитель 236 иглы может дополнительно содержать датчик 250 положения носителя иглы, а также датчик 252 положения скользящей опоры игольных элементов, хотя такие датчики положения не являются обязательными, поскольку серводвигатели должны обеспечивать точные данные позиционирования в отношении носителя 236 иглы и скользящей опоры 244 игольных элементов. Датчики положение, тем не менее, полезны, поскольку они позволяют задавать начальные положения и подтверждать положения в ходе операций по размещению иглы и игольных элементов. Датчик 252 положения скользящей опоры игольных элементов может соединяться посредством гибкого соединительного проводника 254.
Варианты осуществления с применением игл и игольных элементов, управляемых сервоприводом, могут быть объединены с большинством ранее описанных вариантов осуществления, в том числе вариантами осуществления, в которых границы терапии и/или безопасности определяются виртуально перед размещением иглы, а также теми вариантами осуществления, в которых границы терапии и/или безопасности определяются в процессе размещения игольных конструкций.
Как показано на Фиг. 19, в некоторых вариантах осуществления настоящего изобретения положения иглы и/или игольных элементов могут определяться на основе данных ультразвукового изображения, а не информации, получаемой из конфигурации терапевтического зонда. Как показано, поток ультразвуковых данных со встроенного визуализирующего преобразователя обеспечивает обычное изображение, выводимое на устройство отображения, а также обеспечивает изображение иглы и информацию о местоположении в контроллер системы. Пользователь вводит местоположения границ в контроллер системы любым из описанных ранее способов. Контроллер системы затем может рассчитать области проведения терапии и/или границ и сравнить их с фактическими границами, получаемыми на основе контролируемых положений иглы/игольных элементов.
Как показано на Фиг. 20, системы и способы по настоящему изобретению могут также основываться на внешних измерениях траектории иглы, таких как с использованием радиочастотных меток, для отслеживания положения иглы в ткани в режиме реального времени. Данные, поступающие в реальном времени, затем могут служить основанием для контроллера системы при определении того, остаются ли иглы в пределах границ, так чтобы можно было обеспечить как безопасность, так и эффективность лечения.
Хотя в настоящем описании показаны и описаны предпочтительные варианты осуществления настоящего изобретения, специалистам в данной области техники понятно, что такие варианты осуществления представлены лишь в качестве примера. Специалисты в данной области техники смогут предложить многочисленные варианты, изменения и замены, не выходящие за рамки сущности изобретения. Следует понимать, что различные альтернативные решения вариантов осуществления изобретения, приведенных в настоящем описании, могут быть использованы при осуществлении изобретения на практике. Предполагается, что нижеследующая формула изобретения определяет объем изобретения и охватывает способы и конструкции в объеме притязаний этой формулы изобретения и ее эквивалентов.
Реферат
Система для размещения игл в ткани включает в себя контроллер и устройство визуального отображения. Терапевтический зонд имеет иглу и игольные элементы, продвигаемые из иглы и расходящиеся в дистальном направлении. Терапевтический зонд также имеет регулируемые стопоры, управляющие положениями размещения иглы и игольных элементов. Регулируемые стопоры связаны с контроллером таким образом, что виртуальные границы терапии и безопасности, получаемые при выполнении лечения, могут выводиться на устройство визуального отображения перед действительным размещением системы. 2 н. и 13 з.п. ф-лы, 20 ил.
Комментарии