Визуализация зонда, основанная на механических свойствах - RU2521689C2
Код документа: RU2521689C2
Чертежи




Описание
РОДСТВЕННАЯ ЗАЯВКА
По настоящей заявке испрашивается приоритет по предварительной заявке на патент США 61/113712, поданной 12 ноября 2008, которая включена в настоящее описание посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение в целом относится к восприятию положения объекта, помещенного в живой организм, а конкретно к обнаружению и коррекции артефактов, распознанных в процессе восприятия положения зонда в живом организме.
УРОВЕНЬ ТЕХНИКИ
Широкий диапазон медицинских процедур включает помещение внутрь тела объектов, таких как датчики, трубки, катетеры, дозирующие устройства и имплантаты. Для отслеживания таких объектов были разработаны воспринимающие положение системы. Например, Патент США 5983126 Wittkampf, раскрытие которого включено в настоящее описание посредством ссылки, описывает систему, в которой положение катетера обнаруживают с использованием способов электрического импеданса. Публикации патентных заявок США 2006/0173251 Govari с соавторами и 2007/0038078 Osadchy описывают способы восприятия положения зонда посредством пропускания электрических токов через тело между электродом на зонде и множеством местоположений на поверхности тела. Данные способы используют также электрический импенданс тела при восприятии положения зонда.
При использовании для определения положения зонда (например, катетера) измерительной техники, основанной на импендансе, было обнаружено, что, если не принуждать изображение зонда принимать реалистичные формы и положения, могут происходить неожиданные флуктуации, которые являются дезориентирующими для врача, который следит за прибором контроля состояния пациента. Публикация патентной заявки США 2008/0009711, раскрытие которой включено в настоящее описание посредством ссылки, описывает способы усовершенствования визуализации зонда, когда подобную измерительную технику используют с помощью стабилизации изображения зонда на экране дисплея.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Таким образом, в соответствии с вариантом осуществления изобретения предоставляется способ визуализации, заключающийся в том, что принимают входной сигнал, указывающий соответствующие видимые координаты множества точек, расположенных по длине зонда внутри тела субъекта, применяют модель известных механических свойств зонда к видимым координатам для того, чтобы вычислить оценочную функцию по отношению к формам, которые могут быть приняты зондом в теле, выбирают форму в зависимости от оценочной функции, генерируют скорректированные координаты точек по длине зонда, основанные на форме, и отображают на дисплее изображение зонда с использованием скорректированных координат.
В соответствии с вариантом осуществления изобретения также предоставляется компьютерный программный продукт для управления периферийным устройством, причем компьютерный программный продукт включает в себя используемый на компьютере носитель, имеющий реализованный на нем, используемый на компьютере код, причем используемый на компьютере программный код включает в себя используемый на компьютере код, сконфигурированный для приема входного сигнала, указывающего соответствующие видимые координаты множества точек, расположенных по длине зонда внутри тела субъекта, используемый на компьютере код, сконфигурированный для применения модели известных механических свойств зонда к видимым координатам для того, чтобы вычислить оценочную функцию по отношению к формам, которые могут быть приняты зондом в теле, используемый на компьютере код, сконфигурированный для выбора формы в зависимости от оценочной функции, используемый на компьютере код, сконфигурированный для генерирования скорректированных координат точек по длине зонда, основанных на форме, и используемый на компьютере код, сконфигурированный для вывода на дисплей изображения зонда с использованием скорректированных координат.
В соответствии с вариантом осуществления изобретения дополнительно предоставляется устройство визуализации зонда, включающее в себя интерфейс, который сконфигурирован, чтобы принимать входной сигнал, указывающий соответствующие видимые координаты множества точек, расположенных по длине зонда внутри тела субъекта, и процессор, который сконфигурирован, чтобы принимать входной сигнал от интерфейса, применять модель известных механических свойств зонда к видимым координатам для того, чтобы вычислить оценочную функцию по отношению к формам, которые могут быть приняты зондом в теле, выбирать форму в зависимости от оценочной функции и генерировать скорректированные координаты множества датчиков положения по длине зонда, основанные на форме.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение описано в данной заявке исключительно посредством примера со ссылкой на прилагаемые чертежи, на которых:
Фиг.1 представляет собой схематичную наглядную иллюстрацию системы восприятия положения в соответствии с вариантом осуществления настоящего изобретения;
Фиг.2A представляет собой схематичное боковое изображение зонда, отклонившегося от своей свободной формы, в соответствии с вариантом осуществления настоящего изобретения;
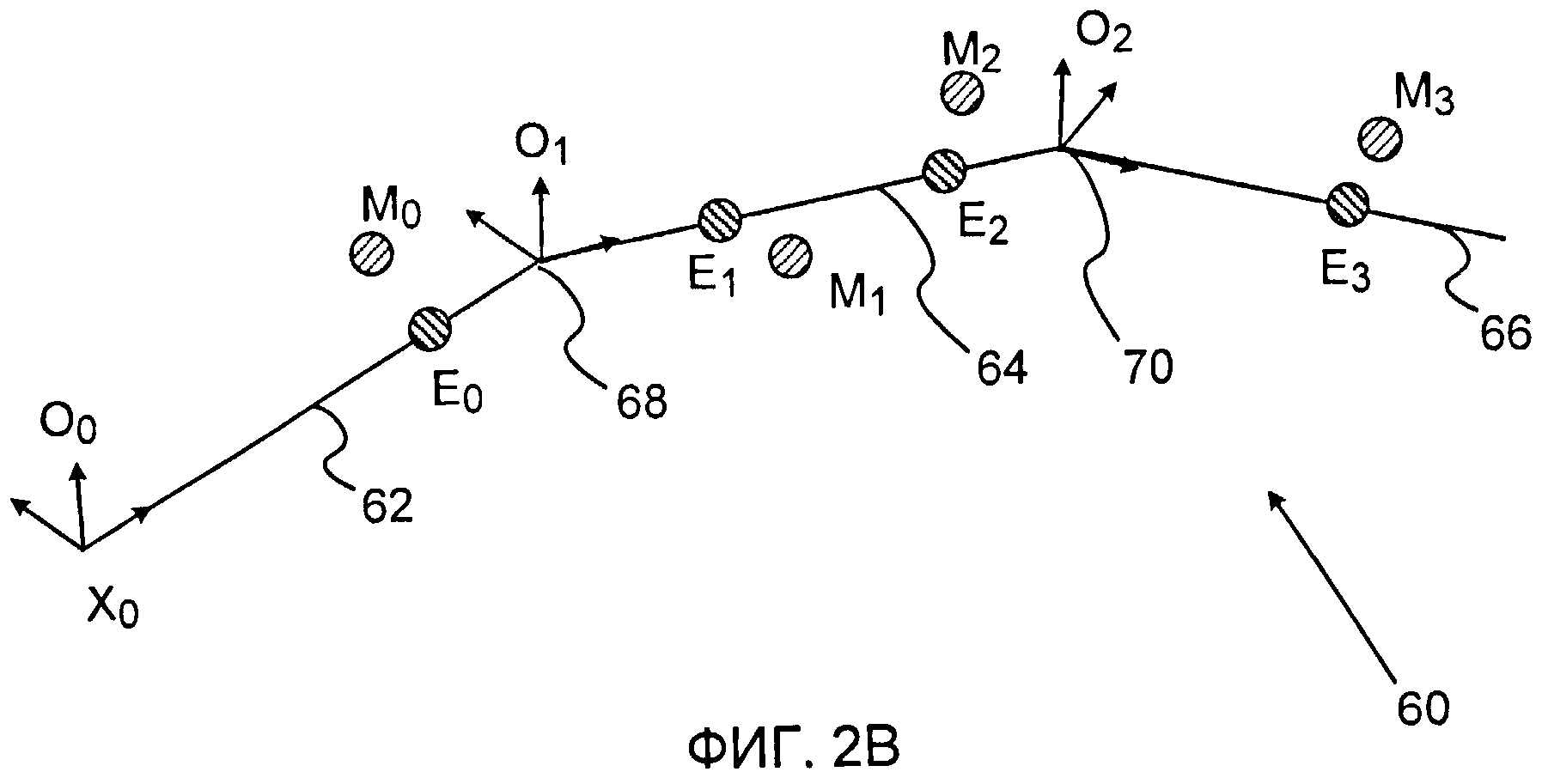
Фиг.2B представляет собой графическое изображение, которое схематично показывает геометрию модели зонда, отклонившегося от своей свободной формы, в соответствии с вариантом осуществления настоящего изобретения;
Фиг.3 представляет собой план, который схематично показывает подробности системы визуализации зонда в соответствии с вариантом осуществления настоящего изобретения;
Фиг.4 представляет собой блок-схему, иллюстрирующую последовательность операций способа визуализации зонда в соответствии с вариантом осуществления настоящего изобретения и
Фиг.5 представляет собой блок-схему, иллюстрирующую последовательность операций способа вычисления оценочной функции в соответствии с вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Следующие условные обозначения используются по всему документу:
Некоторые варианты осуществления настоящего изобретения обеспечивают медицинским работникам возможность более точно визуализировать гибкий зонд в теле субъекта посредством наложения модели механических свойств зонда на видимые координаты, принимаемые от точек на зонде. Процессор сначала применяет модель известных механических свойств зонда к видимым координатам для того, чтобы вычислять оценочную функцию по отношению к формам, которые могут быть приняты зондом в теле. Затем процессор выбирает форму для зонда в зависимости от оценочной функции и затем генерирует набор скорректированных координат точек по длине зонда, основанных на форме. Используя скорректированные координаты, можно вывести более точное изображение зонда.
Фиг.1 представляет собой иллюстрацию системы 10 восприятия положения, сконструированной и функционирующей в соответствии с раскрытым вариантом осуществления изобретения. Систему 10 используют при определении положения гибкого зонда 12, такого как катетер, который вставляют во внутреннюю полость тела субъекта, такую как камера сердца 14. Обычно зонд 12 используют для диагностики или терапевтического лечения, к примеру, топографии распределения электрических потенциалов в сердце 14 или абляции ткани сердца. Зонд 12 или другие устройства для введения внутрь тела могут альтернативно быть использованы для других целей, сами по себе или в сочетании с другими лечебными устройствами. Дистальный конец зонда 12 содержит один или более электродов (Фиг.2А). Данные электроды присоединяют посредством проводов (не показано) через вставную трубку зонда 12 к задающему контуру в блоке 18 управления, как описано ниже.
Блок 18 управления присоединяют посредством проводов через кабель 30 к электродам на поверхности тела, которые обычно содержат приклеиваемые к коже пластыри 32, 34, 36. В альтернативных вариантах осуществления изобретения электроды на поверхности тела могут меняться по количеству и могут принимать другие формы, такие как подкожные зонды или ручные устройства, управляемые медицинским работником 28. Пластыри 32, 34, 36 могут быть помещены в любые подходящие точки на поверхности тела поблизости от зонда 12. Например, при кардиальных применениях пластыри 32, 34, 36 обычно помещают вокруг грудной клетки субъекта 16. Отсутствует специальное требование в отношении ориентирования пластырей по отношению друг к другу или к координатам тела, хотя можно достигнуть большей точности, если пластыри расположить отдельно, нежели группировать в одном месте. Отсутствует требование, что расположение пластырей должно быть вдоль фиксированных осей. Следовательно, расположение пластырей может быть определено для того, чтобы как можно меньше мешать выполняемой медицинской процедуре.
Блок 18 управления определяет положение координат зонда 12 внутри сердца 14, на основе импеданса, измеряемого между зондом 12 и пластырями 32, 34, 36. Блок 18 управления управляет дисплеем 38, который показывает положение зонда 12 внутри субъекта 16. Зонд 12 может быть использован в генерировании карты 40 сердца. Положение зонда 12 может быть наложено на карту 40 или на другое изображение сердца.
Блок 18 управления представляет собой компьютерную систему, включающую процессор, такой как центральный вычислительный блок (CPU) 20, который запрограммирован в программном обеспечении выполнять функции, которые описаны в данной заявке ниже. Блок 18 управления также включает в себя магнитное или основанное на полупроводниках запоминающее устройство 22 для хранения прикладных программ и данных. Связной интерфейс 24 I/O данных обеспечивает блоку 18 управления возможность взаимодействовать с зондом 12 и пластырями 34, 34, 36. Медицинский работник 28 управляет работой блока 18 управления через ряд устройств 26 ввода.
Несмотря на то, что Фиг.1 показывает конкретную конфигурацию системы, другие конфигурации системы могут также быть использованы для воплощения вариантов осуществления настоящего изобретения, и, таким образом, необходимо считать, что они находятся в пределах сущности и объема правовых притязаний данного изобретения. Например, способы, описанные ниже, могут быть применены при корректировке измерений положения, сделанных с использованием датчиков положения других типов, таких, как магнитный или ультразвуковой датчики положения. Термин «датчик положения», как используется здесь, относится к элементу, вмонтированному в зонд, который побуждает блок 18 управления принимать сигналы, показывающие на координаты элемента. Датчик положения может, таким образом, включать в себя приемник на зонде, который генерирует сигнал положения блока управления, основываясь на энергии, принимаемой датчиком; или он может включать в себя передатчик, передающий энергию, которая воспринимается приемником внешним по отношению к зонду. Кроме того, способы, описанные ниже, могут быть аналогично применены при визуализации местоположений не только катетеров, но также зондов других типов, как в сердце, так и в других органах и областях тела.
Блок-схемы и структурные схемы на Фигурах иллюстрируют архитектуру, функциональность и работу возможных осуществлений систем, способов и компьютерных программных продуктов в соответствии с различными вариантами осуществления настоящего изобретения. В этом отношении каждый блок на блок-схемах или структурных схемах может представлять модуль, сегмент или часть кода, который включает в себя одну или более выполняемых команд для осуществления установленной логической функции (функций). Необходимо также отметить, что в некоторых альтернативных осуществлениях функции, отмеченные в блоке, могут существовать не в том порядке, который отмечен на фигурах. Например, два блока, показанные в последовательности, фактически, могут быть выполнены практически одновременно, или блоки могут быть иногда выполнены в обратном порядке в зависимости от данной функциональности. Необходимо также отметить, что каждый блок структурных схем, и/или иллюстрации блок-схем и сочетания блоков в структурных схемах, и/или иллюстрации блок-схем могут быть осуществлены посредством конкретных целевых систем, основанных на аппаратном обеспечении, которые выполняют точно определенные функции или действия, или посредством сочетаний конкретного целевого аппаратного обеспечения и машинных команд.
Фиг.2A и 2B представляют собой графические изображения, схематически изображающие зонд 12, отклонившийся от своей свободной формы, в соответствии с вариантом осуществления настоящего изобретения. Фиг.2A показывает изображение реального изгиба зонда 12 в сердце 14, где зонд 12 включает в себя электроды 50, 52, 56, 58, служащие в качестве датчиков положения в данном варианте осуществления. Фиг.2B представляет собой изображение вычисленной геометрической модели 60 зонда 12. Измеренные местоположения электродов 50, 52, 56, 58, основанные на сигналах, принятых блоком 18 управления, соответственно изображены точками m0, m1, m2 и m3. Альтернативно или дополнительно, в магнитной системе восприятия положения датчики положения могут включать в себя однооосевые магнитные датчики (SAS), передающие положение и направление, и/или трехосевые магнитные датчики (TAS), предоставляющие положение и полную матрицу ориентации.
В модели 60 точки e0, e1, e2 и e3 представляют вычисленные местоположения электродов 50, 52, 56, 58, основанные на измеренных местоположениях точек m0, m1, m2 и m3. В соответствии с вариантом осуществления настоящего изобретения оценочная функция стоимости применяется для выявления лучшего соответствия между точками ejи mj. Модель 60 включает в себя прямые ригидные участки 62, 64 и 66, соединенные посредством стыков 68 и 70, допускающих вращение (изгиб и закручивание). Положение участка 62 описано посредством вектора x0положения, а ориентация участка 62 задана посредством матрицы о0. Матрицы о0ориентации представляет собой локальную систему координат участка 62 с осями



Варианты осуществления настоящего изобретения определяют лучшее соответствие между точками ej и измерениями mj в рамках модели зонда. Отмечено, что рассчитанные местоположения точек е0, е1, е2и е3ограничены моделью, чтобы находиться на участках 62, 64 и 66, но фактические датчики положения (т.е. электроды 50, 52, 56 и 58) не могут быть точно в данных точках. Физические свойства зонда 12 в его свободном состоянии определяются параметрами {N, Lk, Gk(d), Pk}, в которых:
N - количество участков;
Lk - длины участков (не должны быть одинаковые), 0≤k Gk (d) - матрица вращения в качестве функции параметров отклонения d для изгибаемых зондов (или постоянная матрица для зондов с заранее заданной формой), ≤k Pk - множество датчиков положений на участке k, где 0≤k
Физические свойства зонда 12 описаны посредством параметров {Ak, Bk), которые отображают устойчивость стыка между участком k и участком (k-1) к изгибу и закручиванию соответственно.
Зачастую, как показано на Фиг.2B, фактическое положение зонда 12 (как определено посредством местоположений электродов 50, 52, 54, 56) отличается от точек m0, m1, m2 и m3. В вариантах осуществления настоящего изобретения модель зонда определяют, описывая физические характеристики зонда 12, а CPU 20 применяет алгоритм механических свойств зонда, чтобы обеспечить наилучшее соответствие между моделью зонда и измерениями. Результатом является состояние минимальной оценки для зонда 12, которое описывает местоположение и форму (т.е. фактическую форму, отличную от свободной формы) зонда 12 и значения его изгиба (для изгибаемого зонда). Значение изгиба представляет собой параметр модели, который описывает серию свободных форм зонда для изгибаемого зонда). Обычно единственный параметр изгиба затрагивает несколько стыков. Любое стыковое вращение, которое отличается от вращения, определяемого параметром изгиба, увеличивает оценочную функцию.
Алгоритм механических свойств зонда использует оценочную функцию, которая представляет собой взвешенную комбинацию собственной энергии, погрешности в определении положения и погрешности в определении ориентации. Собственная энергия представляет отклонение зонда 12 от своей свободной формы. Погрешность в определении положения представляет погрешность в координатах положения между местоположениями датчиков положений, заданными моделью и состоянием зонда, и фактическими измерениями положений. Наконец, погрешность в определении ориентации представляет погрешность в координатах угловой ориентации между ориентациями датчиков положений, заданными моделью и состоянием зонда, и фактическими измерениями ориентации.
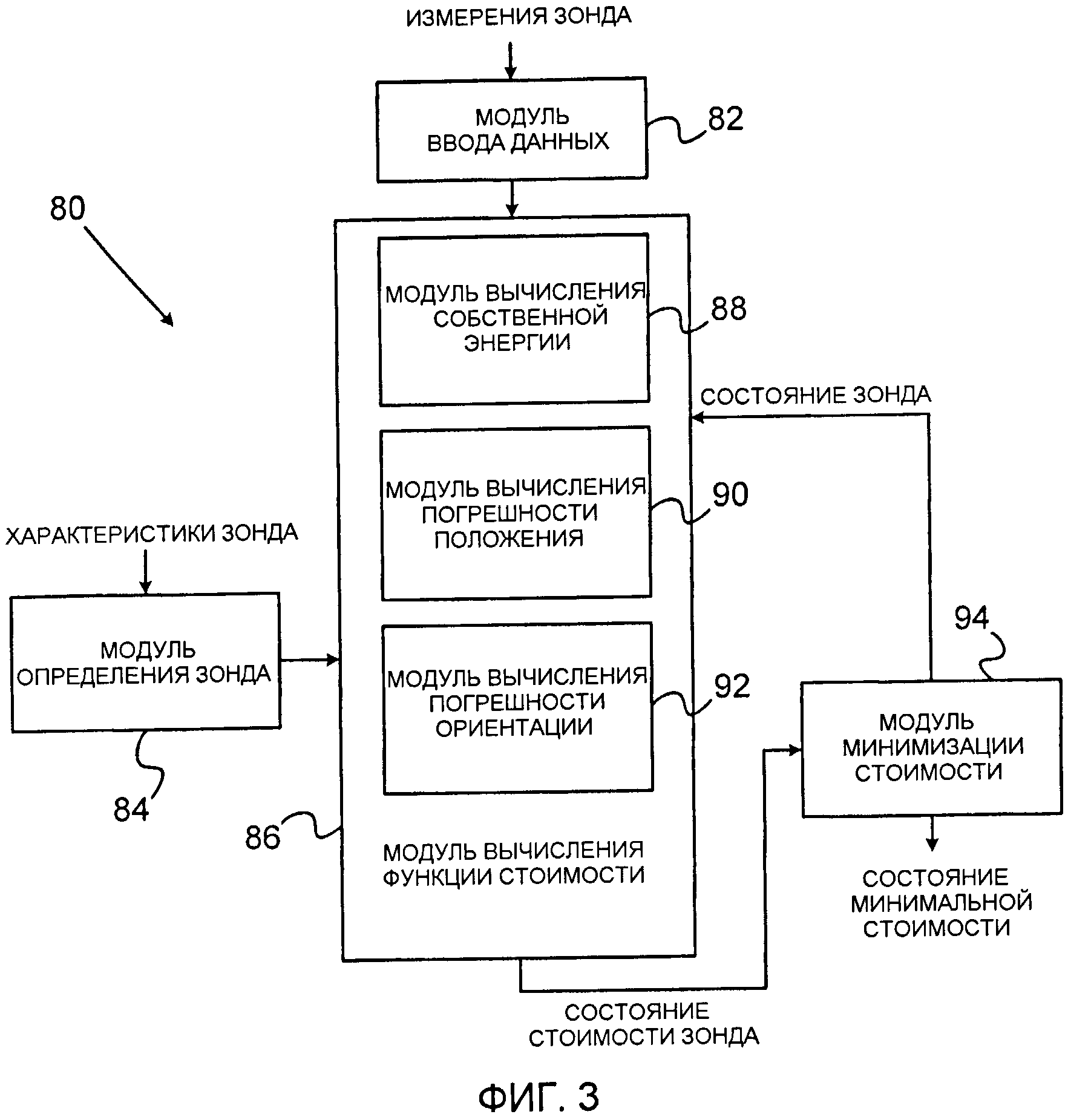
Фиг.3 представляет собой структурную схему 80, которая схематично иллюстрирует функциональные составные элементы системы 10, которые используют при обнаружении и коррекции для артифактов, распознаваемых в процессе восприятия положения зонда, в соответствии с вариантом осуществления настоящего изобретения. Конкретно, данная фигура показывает функциональные элементы программного обеспечения, которое запущено на CPU 20, в ходе определения положения зонда 12. Данные функциональные элементы описаны более подробно со ссылкой на последующие фигуры.
Фиг.4 представляет собой блок-схему, которая схематично иллюстрирует последовательность операций способа визуализации зонда 12, помещенного внутрь субъекта 16, в соответствии с вариантом осуществления настоящего изобретения. Во-первых, модель зонда предварительно загружают в модуль 84 определения (этап 100). Как обсуждается ниже, модель зонда описывает структуру и физические свойства зонда 12 и обычно конкретно определяется для типа катетера или другого зонда, который предполагается использовать. Медицинский работник 28 может выбрать модель, например, из предварительно заданного набора опций.
Как только медицинский работник 28 вводит зонд в субъект 16, модуль 82 ввода данных собирает выходные сигналы положений от электродов 50, 52, 54 и 56 с регулярными промежутками (этап 102). Для каждого датчика 50, 52, 54, 56 положения, определенного в модели зонда, модуль 82 ввода данных принимает соответствующее измерение положения. Измерение может включать вектор положения (все типы датчиков), направление (SAS) и/или полную ориентацию (TAS). В дополнение, в зависимости от уровня значимости измерения с каждым измерением увязывают коэффициент значимости измерения. Коэффициент значимости имеет высокое значение для точных измерений и низкое значение для измерений с большой ожидаемой погрешностью. Недостающие измерения будут иметь коэффициент значимости, равный нулю. Параметры измерений включают:
mj - измерение положения;


После того как модуль 82 ввода данных принимает входные сигналы, модуль 86 вычисления оценочной функции определяет состояние оценки зонда посредством применения оценочной функции для вычисления качества соответствия между моделью зонда, определенной в модуле 84 определения зонда, и данными положения, принятыми от модуля 82 ввода данных (этап 104). Данное соответствие определяет форму зонда с самой низкой оценкой в соответствии с моделью, которая в свою очередь дает скорректированные координаты точек вдоль длины зонда, которые соответствуют местоположениям датчиков положений. Состояние зонда описывает местоположение и форму зонда 12 и значения его изгиба (для изгибаемого зонда). CPU 20 определяет состояние зонда на этапе 104. Состояние задают посредством переменных параметров {x0, rk, d}:
x0 - положение начальной точки первого участка (т.е. на Фиг.2B;
rk - ориентация участка k относительно участка k-1 для 0
d - значения параметров изгиба (для изгибаемых зондов). Данные значения не оказывают влияние на положение и форму зонда 12, но они оказывают влияние на вычисление оценочной функции и, таким образом, оказывают влияние на результат алгоритма механических свойств зонда.
Как часть этапа 104 модуль 86 вычисления оценочной функции подает оценку состояния зонда в модуль 94 минимизации оценки, который применяет алгоритм минимизации к оценочной функции для того, чтобы найти состояние зонда с минимальной оценкой, которое достигает минимального значения оценочной функции (т.е. наилучшего соответствия). Наконец, после определения состояния зонда с минимальной оценкой дисплей 38 представляет карту 40, показывающую положение зонда 12 в субъекте 16 (этап 106). Обычно положение зонда отображается в виде пиктограммы на дисплее, имеющей местоположение, ориентацию и форму, соответствующие модели 60.
Фиг.5 представляет собой блок-схему, которая схематично иллюстрирует последовательность операций способа, посредством которого модуль 86 вычисления оценочной функции применяет оценочную функцию к измерениям зонда, принятым посредством модуля 82 ввода данных, в соответствии с вариантом осуществления настоящего изобретения. Оценочная функция зависит от модели зонда, измерений положения и состояния зонда. С минимизацией оценочной функции относительно состояния зонда {x0, rk, d} обеспечивается наилучшее соответствие между моделью зонда и измерениями. Вычисление оценочной функции также зависит от установки адаптивных коэффициентов значимости, которые задают для измерений. Адаптивные весовые коэффициенты могут динамически изменяться в процессе проведения минимизации оценочной функции и позволяют алгоритму игнорировать измерения, которые абсолютно не согласуются с моделью зонда (описано в данной работе ниже). Адаптивные весовые коэффициенты обозначаются

Оценочная функция имеет три части: собственную энергию, погрешность в определении положения и погрешность в определении ориентации. Сначала модуль 88 вычисления собственной энергии вычисляет количественный показатель собственной энергии (этап 110), который отображает отклонение зонда 12 от его свободной формы (или серию свободных форм, параметризованных посредством переменных параметров изгиба для изгибаемых зондов). Для стыков 68 и 70 разницу ориентации между фактической относительной ориентацией и текущим изгибом вычисляют как:

Модуль 88 вычисления собственной энергии преобразует данную разницу ориентации в углы изгиба и закручивания:

Следующее представляет собой определение функции Углы (r), где r представляет собой унитарную матрицу 3×3, которая отображает вращение:

гдеарктангенс (x, y) является углом между вектором (x, y) и осью x. (3)
Возвращаясь к оценочной функции, модуль 88 вычисления собственной энергии вычисляет количественный показатель собственной энергии с использованием параметров модели зонда {Ak, Bk}:

Модуль 90 вычисления погрешности положения затем вычисляет количественный показатель погрешности положения (этап 112), который отображает погрешность определения положения между местоположениями датчиков положения, заданных посредством модели зонда и состояния, и фактическими измерениями. Модуль 90 вычисления погрешности положения отмечает положения электродов 50, 52, 54, 56, соответствующие модели зонда и состоянию, как ej, а соответствующие измерения, как mj. Модуль 90 вычисления погрешности положения вычисляет взвешенную погрешность определения положения, как изложено ниже:

где M представляет собой ряд датчиков положения.
Модуль 92 вычисления погрешности определения ориентации затем вычисляет количественный показатель погрешности определения ориентации (этап 114), который отображает погрешность ориентации между положением электродов 50, 52, 54, 56, заданным посредством модели зонда и состояния, и фактическими измерениями mj, принятыми посредством модуля 82 ввода данных. Ориентация различных точек вдоль зонда 12, представленная моделью зонда, является бесконечной функцией, которая имеет резкие изменения на стыках моделей (в отличие от положения). После вычисления ориентации всех задействованных датчиков положений



и общую погрешность ориентации:

Модуль 86 вычисления оценочной функции затем вычисляет оценочную функцию как взвешенную комбинацию трех частей (т.е. собственная энергия, погрешность определения положения и погрешность ориентации) (этап 116):

Значения {λint, λpos, λor} описывают относительную значимость отклонения зонда 12 от своей свободной формы против погрешностей определения положения и ориентации.
Как обсуждается ниже, модуль 86 вычисления оценочной функции закладывает вычисленную оценочную функцию (т.е. оценка состояния зонда) в модуль 94 минимизации, который минимизирует оценочную функцию (x0, rk, d) по отношению к переменным параметрам состояния зонда для того, чтобы достигнуть наилучшего соответствия между моделью зонда и фактическими измерениями, принятыми посредством модуля 82 ввода данных (этап 118).
Минимизация может быть выполнена посредством любого подходящего метода численного решения. В одном варианте осуществления настоящего изобретения, например, модуль 86 вычисления оценочной функции использует алгоритм минимизации Бройдена-Флетчера-Гольдфарба-Шенно (BFGS).
Поскольку минимизация оценочной функции на этапе 118 использует итеративный алгоритм (т.е. каждая итерация алгоритма улучшает оценку решения), а положение и форма зонда 12 между измерениями изменяются медленно, авторы изобретения обнаружили, что обычно достаточно применять только одну итерацию алгоритма минимизации оценочной функции для каждого последовательного измерения. После каждой итерации минимизации модуль 94 минимизации оценки закладывает состояние зонда в модуль 86 вычисления оценочной функции, который может изменять адаптивные весовые коэффициенты измерений в соответствии с индивидуальными погрешностями датчиков определения положения. Обычно весовые коэффициенты, соответствующие импеданс чувствительным электродам, адаптируют, тогда как более точным датчикам, таким как магнитные датчики положений, оставляют весовой коэффициент, равный 1.
Модуль 86 вычисления оценочной функции выполняет процедуру адаптации весового коэффициента следующим образом:
1. Вычисляет исходные новые весовые коэффициенты

где значение σ является большим для датчиков с большей ожидаемой погрешностью, в связи с этим допуская большую погрешность перед уменьшением в соответствующем адаптивном весовом коэффициенте.
2. Нормализует исходные весовые коэффициенты

3. Ограничивает каждый весовой коэффициент сверху 1

4. Корректирует адаптивные весовые коэффициенты

Данная адаптационная процедура обеспечивает возможность процессу минимизации игнорировать датчики положений, которые постоянно дают большие погрешности, но не давая возможности игнорировать очень много датчиков положений.
Соответствующие структуры, материалы, действия и эквиваленты всех средств или этапов плюс функциональные элементы в формуле изобретения ниже предполагают включение любой структуры, материала или действия для выполнения функции в сочетании с другими заявленными элементами, как конкретно заявлено. Описание настоящего изобретения было представлено для целей иллюстрирования и описания, но не предназначено быть исчерпывающим или ограничительным для изобретения в раскрытом виде. Квалифицированным специалистам в данной области будут очевидны многие модификации и варианты без выхода за пределы правовых притязаний и сущности изобретения. Данный вариант осуществления был выбран и описан для того, чтобы наилучшим образом объяснить принципы изобретения и практическое применение и чтобы позволить другим рядовым специалистам в данной области понять изобретение для различных вариантов осуществления с различными модификациями в качестве пригодных для конкретного предполагаемого применения. Предполагается, что приложенная формула изобретения охватывает все подобные признаки и преимущества изобретения, которые подпадают в пределы сущности и объема правовых притязаний настоящего изобретения. Поскольку специалисты в данной области легко встретят множество модификаций и изменений, предполагается, что изобретение не должно быть ограничено рядом вариантов осуществления, описанных в данной заявке. Соответственно, будет очевидно, что все подходящие варианты, модификации и эквиваленты могут обращаться к настоящему изобретению, попадая в пределы его сущности и объема правовых притязаний.
Реферат
Изобретение относится к устройствам и способам определения положения объекта, помещенного в живой организм. Способ визуализации включает прием входного сигнала, указывающего соответствующие видимые координаты множества точек, расположенных по длине зонда внутри тела субъекта, и применение модели известных механических свойств зонда к видимым координатам для того, чтобы рассчитать оценочную функцию относительно форм, которые могут быть приняты зондом в теле. Форму выбирают соответственно оценочной функции, а скорректированные координаты точек по длине зонда генерируют на основе формы. Изображение зонда с использованием скорректированных координат затем выводят на дисплей. Устройство включает интерфейс, принимающий сигналы, указывающие видимые координаты множества датчиков, расположенных по длине зонда внутри тела субъекта, а также процессор, выполняющий этапы способа визуализации. Использование изобретения обеспечивает более точную визуализацию гибкого зонда в теле субъекта. 3 н. и 19 з.п. ф-лы, 5 ил.
Формула
принимают входной сигнал, указывающий соответствующие видимые координаты множества точек, расположенных по длине зонда внутри тела субъекта, причем зонд содержит множество датчиков положений, расположенных по длине зонда внутри тела субъекта;
применяют модель известных механических свойств зонда к видимым координатам для того, чтобы вычислить оценочную функцию по отношению к формам, которые могут быть приняты зондом в теле;
выбирают форму в зависимости от оценочной функции;
генерируют скорректированные координаты точек по длине зонда, основанные на форме; и
отображают представление зонда с использованием скорректированных координат, причем оценочную функцию рассчитывают посредством: вычисления собственной энергии, показывающей отклонение зонда от своей свободной формы; вычисления погрешности положения между моделью известных механических свойств зонда и входным сигналом, указывающим соответствующие видимые координаты множества точек, расположенных по длине зонда; вычисления погрешности ориентации между моделью известных механических свойств зонда и входным сигналом, указывающим соответствующие видимые координаты множества точек, расположенных по длине зонда; и вычисления оценочной функции в качестве средневзвешенного значения собственной энергии, погрешности положения и погрешности ориентации.
многочисленные участки зонда;
длину каждого из участков;
матрицу вращения, определяющую относительное вращение каждого из участков относительно предшествующего участка; и
местоположение на зонде каждой из множества точек.
принимают входной сигнал, указывающий соответствующие видимые координаты множества точек, расположенных по длине зонда внутри тела субъекта, причем зонд содержит множество датчиков положений, расположенных по длине зонда внутри тела субъекта;
применяют модель известных механических свойств зонда к видимым координатам для того, чтобы вычислить оценочную функцию по отношению к формам, которые могут быть приняты зондом в теле;
выбирают форму в зависимости от оценочной функции;
генерируют скорректированные координаты точек по длине зонда, основанные на форме; и
отображают представление зонда с использованием скорректированных координат, причем оценочную функцию рассчитывают посредством: вычисления собственной энергии, показывающей отклонение зонда от своей свободной формы; вычисления погрешности положения между моделью известных механических свойств зонда и входным сигналом, указывающим соответствующие видимые координаты множества точек, расположенных по длине зонда; вычисления погрешности ориентации между моделью известных механических свойств зонда и входным сигналом, указывающим соответствующие видимые координаты множества точек, расположенных по длине зонда; и вычисления оценочной функции в качестве средневзвешенного значения собственной энергии, погрешности положения и погрешности ориентации.
многочисленные участки зонда;
длину каждого из участков;
матрицу вращения, определяющую относительное вращение каждого из участков относительно предшествующего участка; и
местоположение на зонде каждой из множества точек.
интерфейс, который сконфигурирован с возможностью принимать входной сигнал, указывающий соответствующие видимые координаты множества точек, расположенных по длине зонда внутри тела субъекта, причем зонд содержит множество датчиков положений, расположенных по длине зонда внутри тела субъекта; и
процессор, который сконфигурирован с возможностью
принимать входной сигнал от интерфейса;
применять модель известных механических свойств зонда к видимым координатам для того, чтобы вычислять оценочную функцию по отношению к формам, которые могут быть приняты зондом в теле;
выбирать форму в зависимости от оценочной функции; и
генерировать скорректированные координаты множества датчиков положения по длине зонда, основанные на форме, причем оценочную функцию рассчитывают посредством: вычисления собственной энергии, показывающей отклонение зонда от своей свободной формы; вычисления погрешности положения между моделью известных механических свойств зонда и входным сигналом, указывающим соответствующие видимые координаты множества точек, расположенных по длине зонда; вычисления погрешности ориентации между моделью известных механических свойств зонда и входным сигналом, указывающим соответствующие видимые координаты множества точек, расположенных по длине зонда; и вычисления оценочной функции в качестве средневзвешенного значения собственной энергии, погрешности положения и погрешности ориентации.
многочисленные участки зонда;
длину каждого из участков;
матрицу вращения, определяющую относительное вращение каждого из участков относительно предшествующего участка; и
местоположение на зонде каждой из множества точек.
Комментарии