Определение и калибровка длины иглы для системы наведения иглы - RU2609203C2
Код документа: RU2609203C2
Чертежи






















Описание
ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Настоящая заявка представляет собой частичное продолжение заявки на патент США №13/118,033, поданной 27 мая 2011 года и озаглавленной «Система наведения для игл и медицинских компонентов», которая представляет собой частичное продолжение заявки на патент США №12/323,273, поданной 25 ноября 2008 года и озаглавленной «Комплексная система для внутрисосудистой установки катетера», и которая заявляет приоритет в соответствии с предварительной заявкой на патент США №61/349,771, поданной 28 мая 2010 года и озаглавленной «Система наведения для введения иглы». Также заявляется приоритет в соответствии с предварительной заявкой на патент США №61/505,036, поданной 6 июля 2011 года и озаглавленной «Определение длины иглы и калибровка для системы наведения для введения иглы». Все упомянутые выше заявки полностью включены в настоящее описание посредством ссылки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0002] Варианты осуществления настоящего изобретения направлены на обеспечение комплексной системы установки катетера, конфигурированной для точной установки катетера в сосудистой системе пациента. В упомянутой комплексной системе применяют по меньшей мере два механизма повышения точности установки катетера: 1) ультразвуковую систему наведения для введения катетера в сосудистую систему пациента; 2) систему определения местоположения кончика (tip location system, TLS), или основанное на магнитном взаимодействии (например, с использованием постоянного магнита(-ов) или электромагнита(-ов)) отслеживание кончика катетера при его продвижении через сосудистую систему для обнаружения и коррекции любых отклонений кончика от правильного положения во время упомянутого продвижения.
[0003] В одном из вариантов осуществления настоящего изобретения упомянутая комплексная система включает системную консоль, включающую управляющий процессор, датчик определения положения кончика для временного размещения на части тела пациента и ультразвуковой зонд. Упомянутый датчик определения положения кончика обнаруживает магнитное поле стилета, размещенного во внутреннем канале катетера, когда катетер находится в сосудистой системе. Упомянутый ультразвуковой зонд формирует изображение ультразвуковой визуализации части сосудистой системы перед введением катетера в сосудистую систему. Дополнительно, упомянутый ультразвуковой зонд включает органы управления пользовательским вводом для обеспечения управления использованием упомянутого ультразвукового зонда в режиме ультразвуковой визуализации и упомянутого датчика определения положения кончика в режиме определения местоположения кончика.
[0004] В другом варианте осуществления настоящего изобретения в системе применяют также третий режим, а именно, наведение кончика катетера на основе ЭКГ-сигнала, для наведения кончика катетера в требуемое положение относительно узла сердца пациента, являющегося источником ЭКГ-сигналов.
[0005] Дополнительно, варианты осуществления настоящего изобретения направлены также на обеспечение системы наведения для помощи при введении иглы или другого медицинского компонента в тело пациента. В упомянутой системе наведения применяют ультразвуковую визуализацию или другую подходящую технологию формирования изображений.
[0006] В одном из вариантов осуществления настоящего изобретения упомянутая система наведения включает устройство визуализации, включающее зонд для получения изображения целевой области внутри тела пациента, такой, например, как подкожный сосуд. В состав упомянутого зонда входят один или более датчиков. Упомянутые датчики измеряют обнаружимые характеристики, связанные с иглой, например, магнитное поле магнита, входящего в состав иглы.
[0007] Упомянутая система включает процессор, который использует данные, относящиеся к упомянутым обнаружимым характеристикам, измеряемым упомянутыми датчиками, для определения положения и/или ориентации иглы в трех пространственных измерениях. Упомянутая система включает дисплей для отображения положения и/или ориентации упомянутый иглы совместно с изображением цели.
[0008] Дополнительно к измерениям на основе магнитного взаимодействия описаны другие способы определения положения медицинского компонента, включая системы на базе оптических и электромагнитных сигналов. В еще одном варианте осуществления настоящего изобретения описаны системы и способы определения длины иглы или другого медицинского компонента, наводимых с помощью системы наведения. В других вариантах осуществления настоящего изобретения описаны способы калибровки системы наведения в присутствии игл или других медицинских компонентов, включающих магнитные элементы.
[0009] Эти и другие признаки вариантов осуществления настоящего изобретения будут более понятны из последующего описания и приложенной формулы изобретения или могут быть изучены путем практического применения вариантов осуществления настоящего изобретения в соответствии с последующим описанием.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[00010] Более подробное описание настоящего изобретения будет выполнено путем ссылок на конкретные варианты его осуществления, проиллюстрированные на приложенных чертежах. Следует понимать, что эти чертежи иллюстрируют лишь типовые варианты осуществления настоящего изобретения и, следовательно, не должны рассматриваться как ограничивающие объем изобретения. Примеры осуществления настоящего изобретения будут рассмотрены и описаны более подробно с использованием приложенных чертежей, где:
[00011] фиг.1 представляет собой блок-схему, иллюстрирующую различные элементы комплексной системы для внутрисосудистой установки катетера в соответствии с одним из примеров осуществления настоящего изобретения;
[00012] фиг.2 представляет собой упрощенное изображение пациента и катетера, вводимого в него с помощью комплексной системы, показанной на фиг.1;
[00013] фиг.3A и 3B представляют собой изображения зонда комплексной системы, показанной на фиг.1;
[00014] фиг.4 представляет собой снимок экрана с изображением ультразвуковой визуализации, отображенным на дисплее комплексной системы, показанной на фиг.1;
[00015] фиг.5 представляет собой вид в перспективе стилета, применяемого в комбинации с системой, показанной на фиг.1, при установке катетера в сосудистой системе пациента;
[00016] фиг.6 представляет собой значок, отображаемый на дисплее комплексной системы, показанной на фиг.1, и указывающий на положение дистального конца стилета, показанного на фиг.5, во время процедур задания положения кончика катетера;
[00017] фиг.7А-7Е иллюстрируют различные примеры значков, которые могут быть отображены на дисплее комплексной системы, показанной на фиг.1, во время процедур задания положения кончика катетера;
[00018] фиг.8А-8С представляют собой снимки экрана с изображениями, отображаемыми на дисплее комплексной системы, показанной на фиг.1, во время процедур задания положения кончика катетера;
[00019] фиг.9 представляет собой блок-схему, иллюстрирующую различные элементы комплексной системы для внутрисосудистой установки катетера в соответствии с другим примером осуществления настоящего изобретения;
[00020] фиг.10 представляет собой упрощенное изображение пациента и катетера, вводимого в него с помощью комплексной системы, показанной на фиг.9;
[00021] фиг.11 представляет собой вид в перспективе стилета, применяемого в комбинации с комплексной системой, показанной на фиг.9, при установке катетера в сосудистой системе пациента.
[00022] фиг.12А-12Е представляют собой различные виды частей стилета, показанного на фиг.11;
[00023] фиг.13A-13D представляют собой различные виды узла ножевого соединителя для использования вместе с комплексной системой, показанной на фиг.9;
[00024] фиг.14А-14С представляют собой изображения, иллюстрирующие соединение кабеля стилета и ножевого соединителя с датчиком комплексной системы, показанной на фиг.9
[00025] фиг.15 представляет собой вид в разрезе соединения кабеля стилета, ножевого соединителя и датчика, показанных на фиг.14С;
[00026] фиг.16 представляет собой упрощенное изображение электрокардиограммы пациента;
[00027] фиг.17 представляет собой снимок экрана с изображением, отображаемым на дисплее комплексной системы, показанной на фиг.9, во время процедур задания положения кончика катетера;
[00028] фиг.18 представляет собой блок-схему, иллюстрирующую различные элементы ультразвуковой системы наведения для игл и других медицинских компонентов в соответствии с одним из вариантов осуществления настоящего изобретения;
[00029] фиг.19 представляет собой упрощенное изображение пациента и вводимого в него катетера, иллюстрирующее одно из возможных окружений, в котором может быть применена на практике система наведения, показанная на фиг.18;
[00030] фиг.20 представляет собой вид сверху ультразвукового зонда системы наведения, показанной на фиг.18;
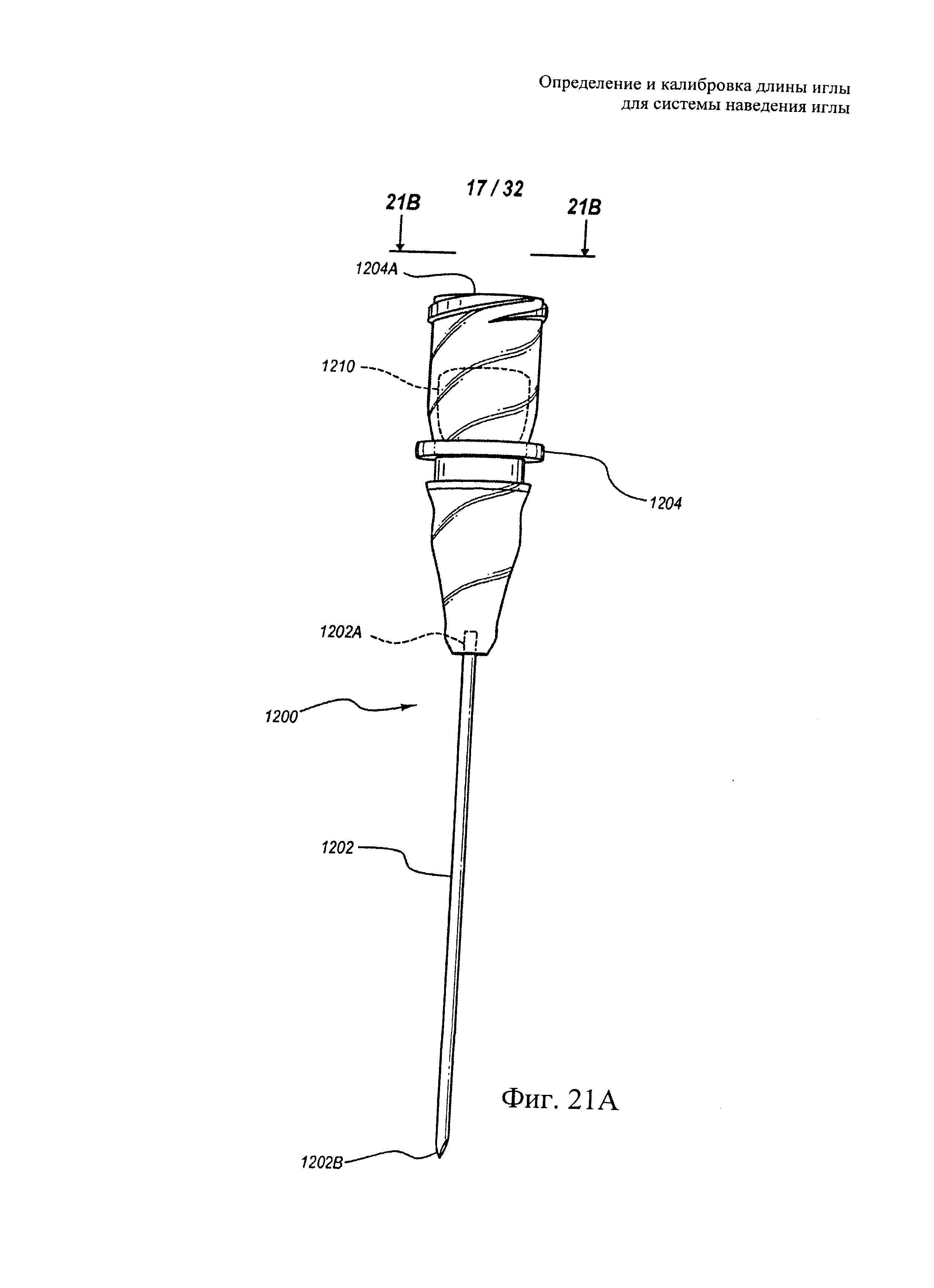
[00031] фиг.21А представляет собой вид сбоку иглы для использования с системой наведения, показанной на фиг.18, в соответствии с одним из вариантов осуществления настоящего изобретения;
[00032] фиг.21В представляет собой вид с торца иглы, показанной на фиг.21А;
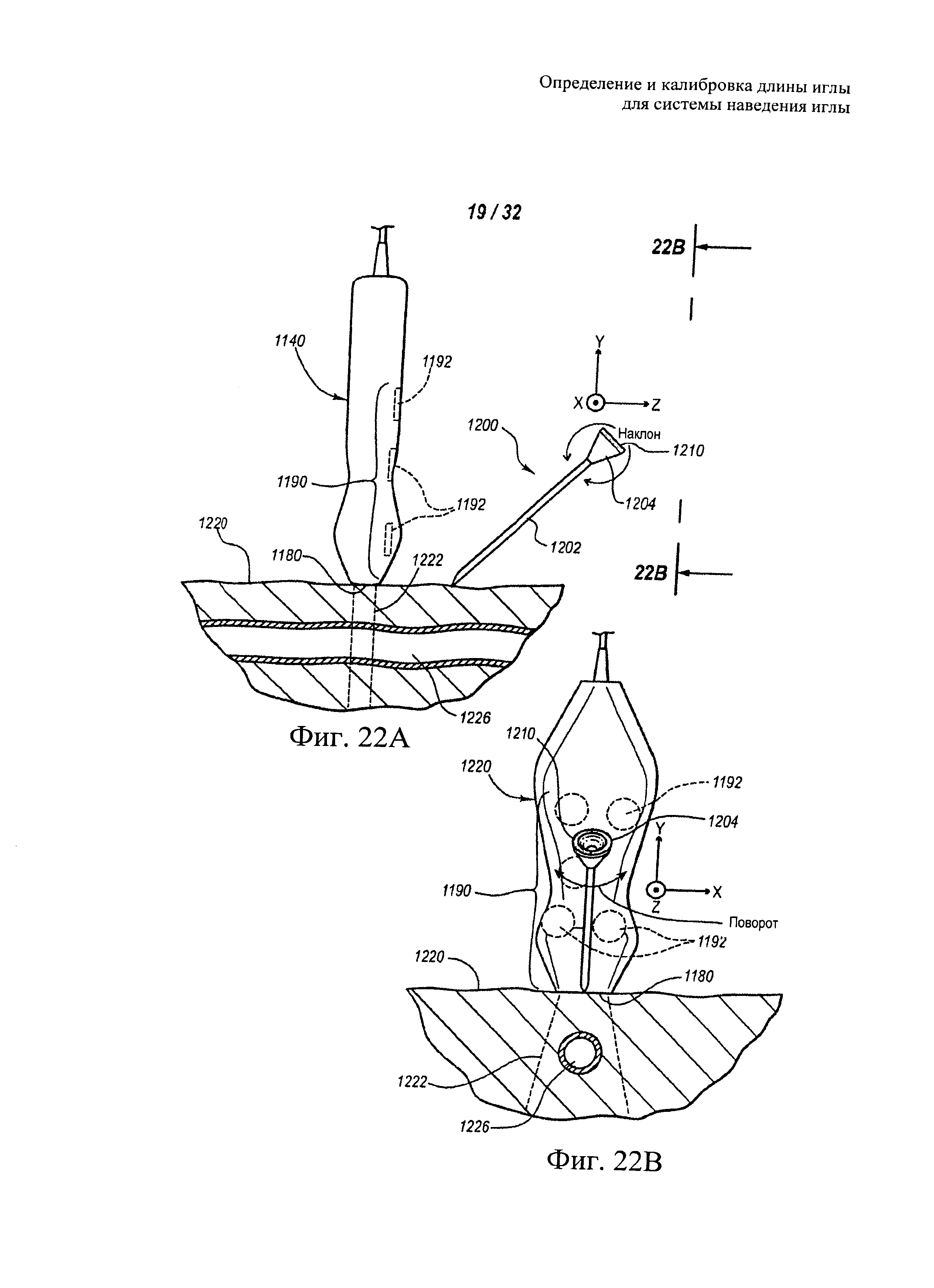
[00033] фиг.22А и 22В представляют собой упрощенные изображения ультразвукового зонда системы наведения, используемой для введения иглы в сосуд внутри тела пациента;
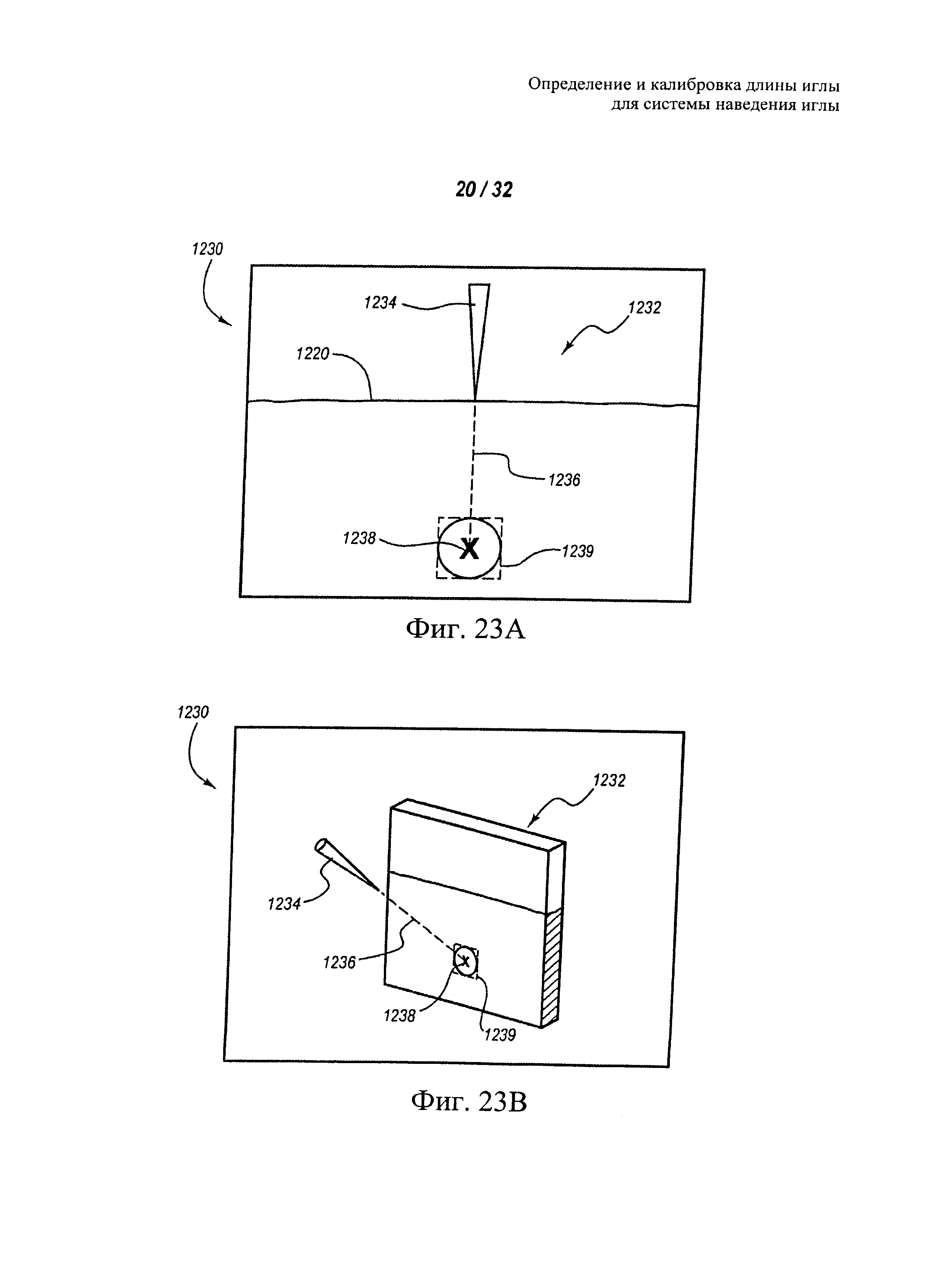
[00034] фиг.23А и 23В иллюстрируют возможные снимки экрана, иллюстрирующие отображение на дисплее системы наведения, где показаны положение и ориентация иглы в соответствии с одним из вариантов осуществления настоящего изобретения;
[00035] фиг.24 иллюстрирует различные шаги способа наведения иглы в требуемую цель внутри тела пациента в соответствии с одним из вариантов осуществления настоящего изобретения;
[00036] фиг.25 иллюстрирует массив датчиков, крепящийся к ультразвуковому зонду, и связанный с ним дисплей в соответствии с одним из вариантов осуществления настоящего изобретения;
[00037] фиг.26 представляет собой упрощенное изображение пистолета-держателя иглы для использования совместно с системой наведения, показанной на фиг.18, в соответствии с одним из вариантов осуществления настоящего изобретения;
[00038] фиг.27 представляет собой упрощенное изображение ультразвукового зонда и иглы, включающих элементы оптической системы наведения в соответствии с одним из вариантов осуществления настоящего изобретения;
[00039] фиг.28 иллюстрирует работу ультразвукового зонда и иглы, показанной на фиг.27, в соответствии с одним из вариантов осуществления настоящего изобретения;
[00040] фиг.29 представляет собой упрощенное изображение ультразвукового зонда и иглы, включающих элементы системы наведения на основе электромагнитных сигналов в соответствии с одним из вариантов осуществления настоящего изобретения;
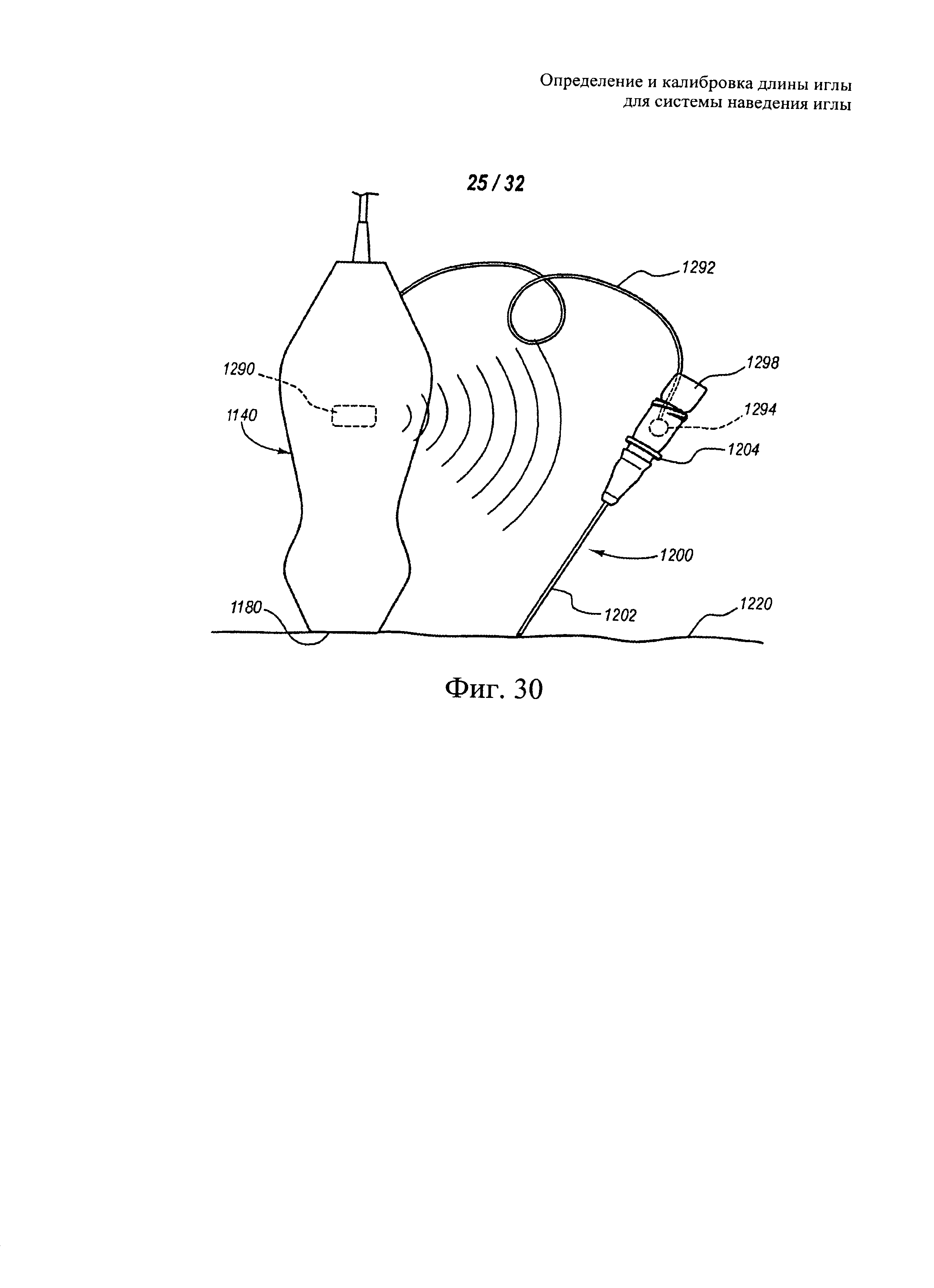
[00041] фиг.30 представляет собой упрощенное изображение ультразвукового зонда и иглы, включающих элементы системы наведения на основе электромагнитных сигналов в соответствии с другим вариантом осуществления настоящего изобретения;
[00042] фиг.31A-31D представляют собой различные виды иглы и связанных с ней компонентов для использования с системой наведения иглы в соответствии с одним из вариантов осуществления настоящего изобретения;
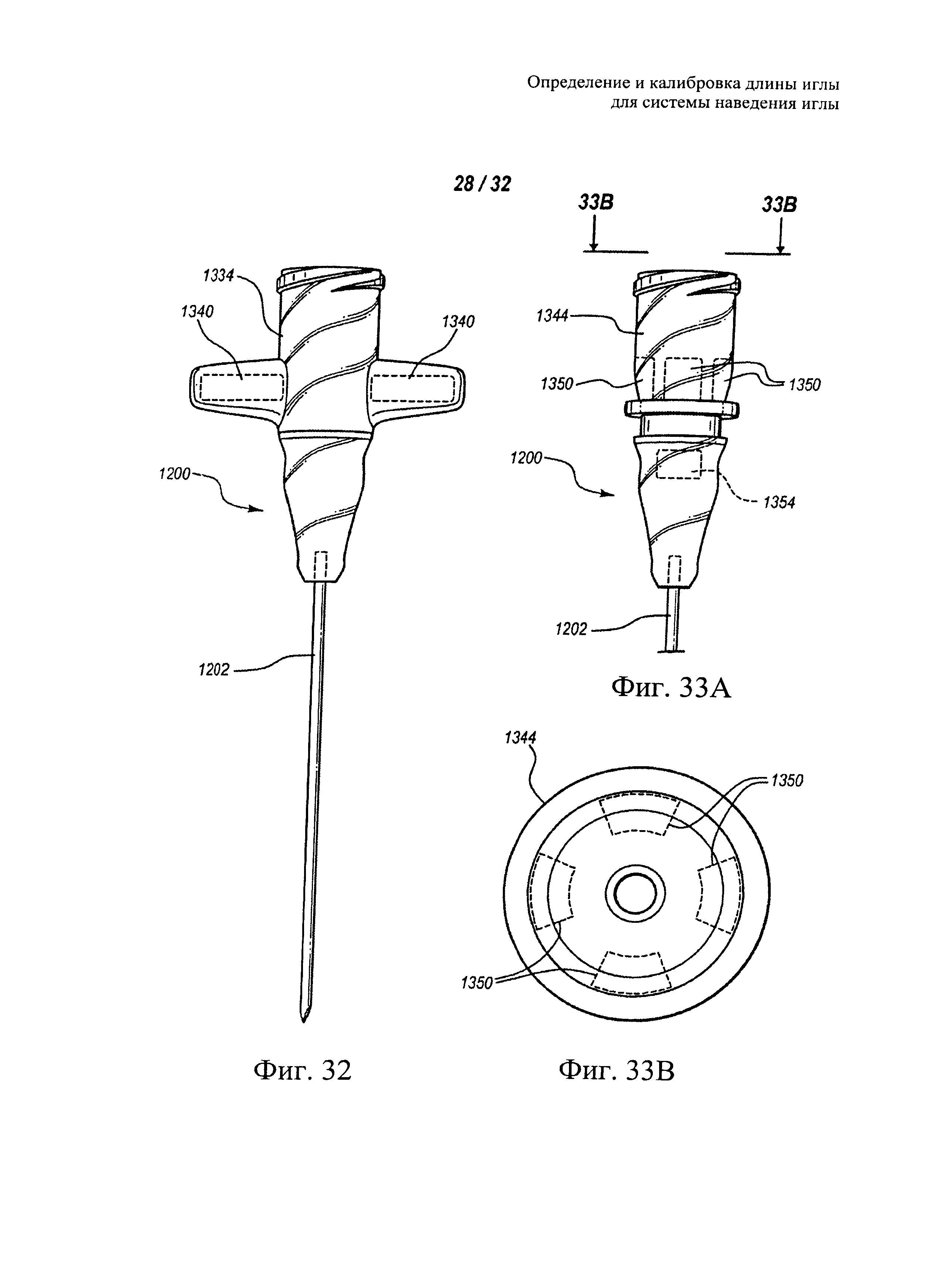
[00043] фиг.32 представляет собой вид сбоку иглы для использования с системой наведения иглы в соответствии с одним из вариантов осуществления настоящего изобретения;
[00044] фиг.33А и 33В представляют собой различные виды иглы для использования совместно с системой наведения иглы в соответствии с одним из вариантов осуществления настоящего изобретения;
[00045] фиг.34A-34G представляют собой виды магнитных элементов с различной формой для использования совместно с системой наведения иглы в соответствии с одним из вариантов осуществления настоящего изобретения;
[00046] фиг.35 представляет собой упрощенное изображение вида сбоку ультразвукового зонда системы наведения, показанной на фиг.18, включающей систему определения длины компонента в соответствии с одним из вариантов осуществления настоящего изобретения;
[00047] фиг.36А-36С иллюстрируют различные виды направляющего узла иглы, включающего приспособление для крепления иглы в качестве части системы определения длины компонента в соответствии с одним из вариантов осуществления настоящего изобретения; и
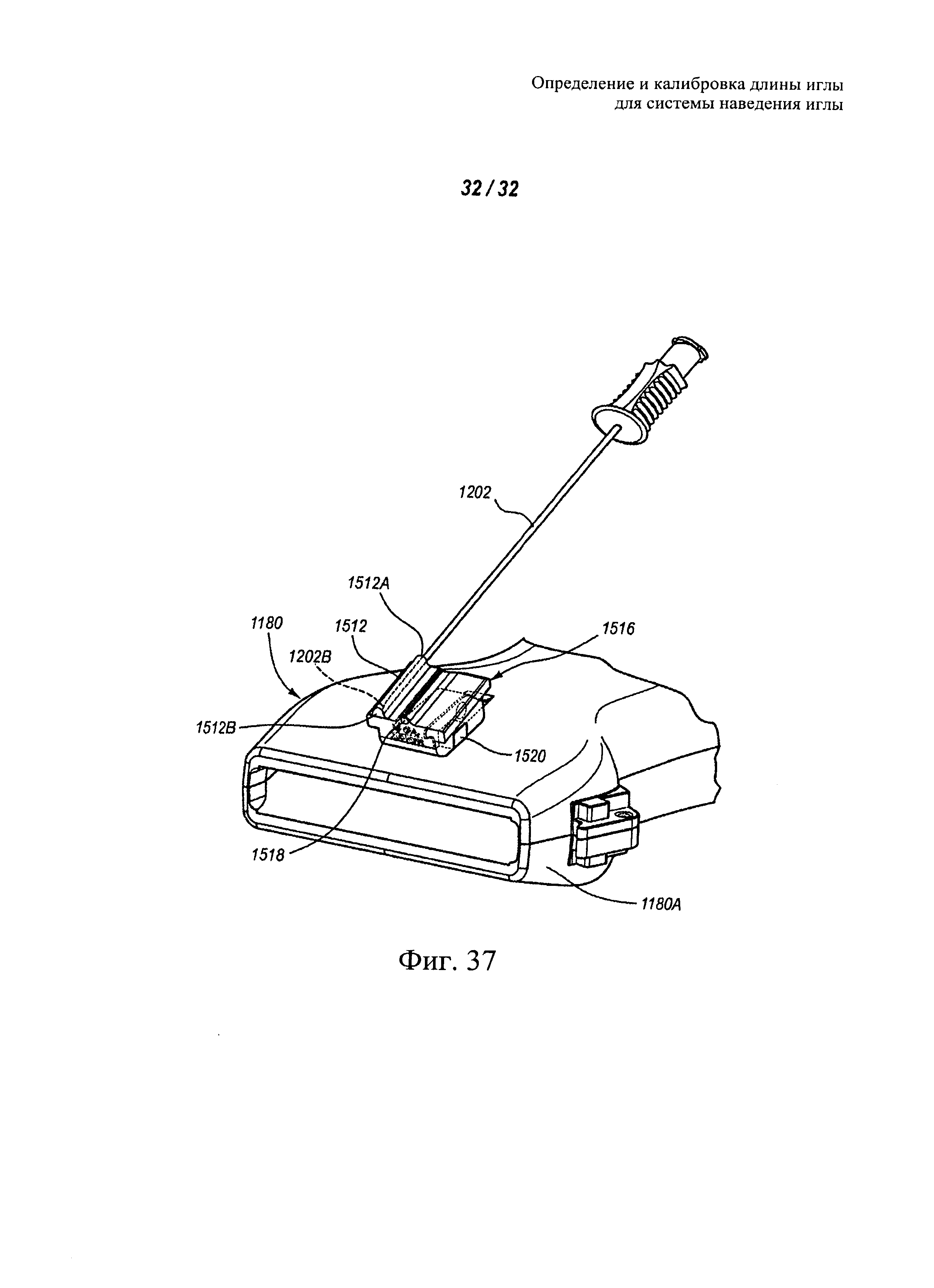
[00048] фиг.37 представляет собой вид в перспективе узла наведения/крепления иглы, зафиксированного на зонде, показанном на фиг.35.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[00049] Далее будут сделаны ссылки на чертежи, где аналогичные структуры снабжены аналогичными числовыми обозначениями. Следует понимать, что чертежи представляют собой схематические и эскизные иллюстрации примеров осуществления настоящего изобретения и не являются ограничивающими настоящее изобретение, а также не обязательно выполнены в масштабе.
[00050] Для ясности, нужно понимать, что слово «проксимальный» относится к направлению, относительно более близкому к врачу, применяющему описанное в настоящем изобретении устройство, тогда как слово «дистальный» относится к направлению, относительно более удаленному от врача. Например, конец иглы, размещенный в теле пациента, называется дистальным концом иглы, тогда как конец иглы, оставшийся вне тела, является проксимальным концом иглы. Также, слова «включающий», «имеет» и «имеющий» в настоящем описании, включая формулу изобретения, имеют то же значение, что и слово «содержащий».
I. Ассистируемая установка катетера
[00051] Варианты осуществления настоящего изобретения в общем направлены на обеспечение комплексной системы установки катетера, конфигурированной для точной установки катетера в сосудистой системе пациента. В одном из вариантов осуществления настоящего изобретения в упомянутой системе установки катетера применяют по меньшей мере два механизма повышения точности установки катетера: 1) ультразвуковое наведение для введения катетера в сосудистую систему пациента; 2) систему определения местоположения кончика (tip location system, TLS) или основанное на магнитном взаимодействии отслеживание кончика катетера при его продвижении через изгибы сосудистой системы для определения и выполнения коррекции любых отклонений от правильного положения кончика во время упомянутого продвижения. Функции ультразвукового наведения и определения местоположения кончика в настоящей системе в соответствии с одним из вариантов осуществления настоящего изобретения интегрированы в одном устройстве, используемом врачом, который устанавливает катетер. Объединение двух этих механизмов в одном устройстве упрощает процедуру установки катетера и обеспечивает относительно более быструю установку катетера. Например, комплексная система установки катетера обеспечивает возможность отображения работы системы ультразвуковой визуализации и TLS на одном дисплее комплексной системы. При этом органы управления, размещенные на ультразвуковом зонде комплексной системы, который удерживается в стерильном поле пациента при установке катетера, могут использоваться для управления функциональными возможностями системы, что устраняет необходимость выхода врача за стерильное поле для управления системой.
[00052] В другом варианте осуществления настоящего изобретения в систему включен третий режим, а именно, наведение кончика катетера на основе ЭКГ-сигнала для обеспечения наведения кончика катетера в требуемое положение относительно узла сердца пациента, являющегося источником ЭКГ-сигналов. Подобная помощь при позиционировании на основе ЭКГ сигналов называется также в настоящем описании «подтверждением положения кончика».
[00053] Комбинация трех описанных выше режимов в соответствии с одним из вариантов осуществления настоящего изобретения позволяет системе установки катетера упрощать установку катетера в сосудистую систему пациента с относительно высоким уровнем точности, то есть осуществлять установку дистального кончика катетера в заранее заданное требуемое положение. При этом, благодаря ЭКГ-наведению кончика катетера, корректная установка кончика может быть подтверждена без необходимости подтверждающего рентгеновского исследования. Это, в свою очередь, снижает воздействие на пациента потенциально опасных рентгеновских лучей, а также затраты и количество времени, необходимые для перевода пациента в рентгенологическое отделение и обратно, затратные и сложные процедуры изменения положения катетера и т.п.
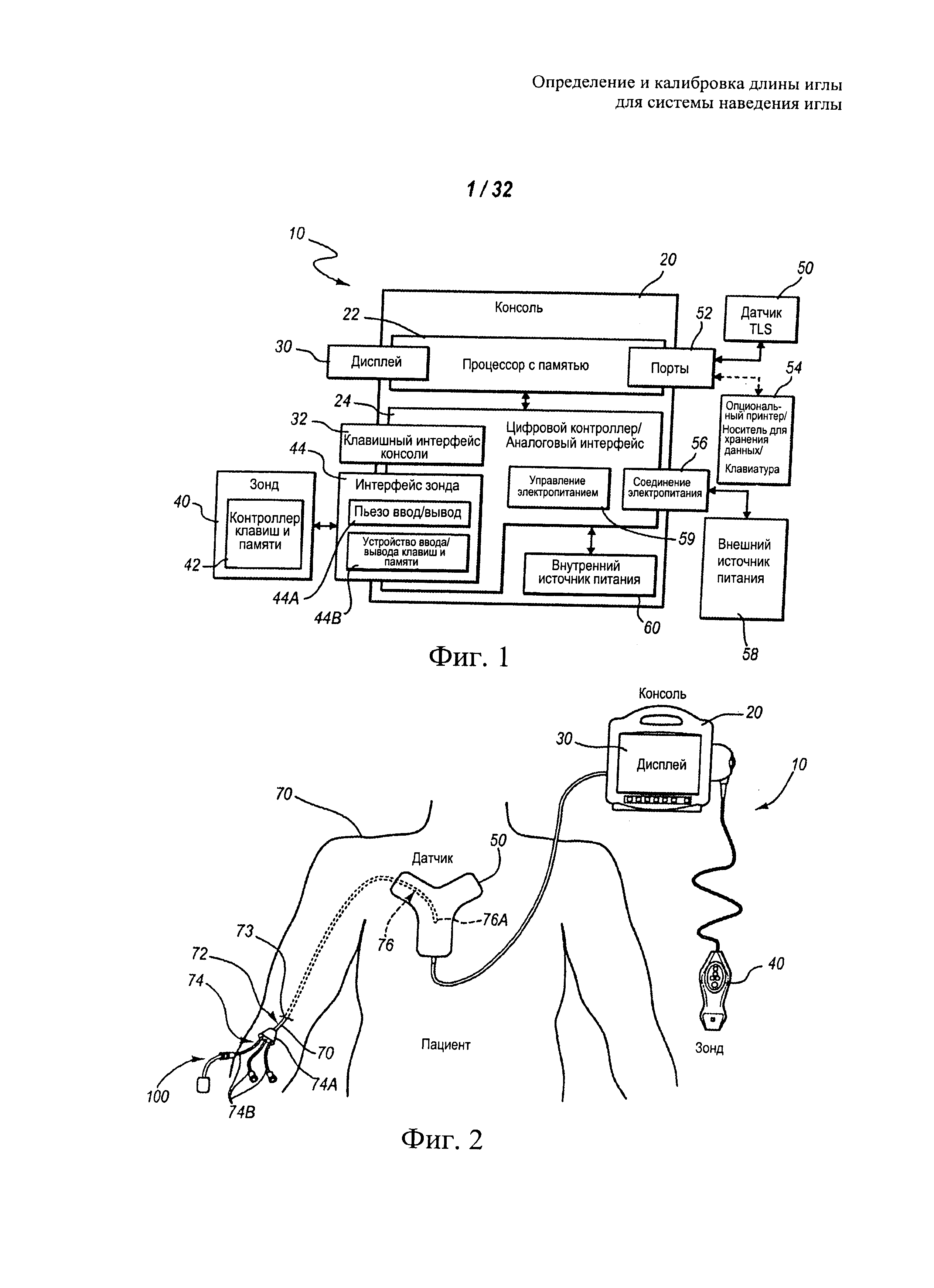
[00054] Для начала обратимся к фиг.1 и 2, иллюстрирующим различные компоненты системы установки катетера («системы»), обозначенной в целом как 10 и конфигурированной в соответствии с одним из примеров осуществления настоящего изобретения. Как показано на чертеже, система 10 в целом включает консоль 20, дисплей 30, зонд 40 и датчик 50, при этом каждый из этих элементов подробно описан ниже.
[00055] Фиг.2 иллюстрирует общую связь этих компонентов с пациентом 70 во время процедуры установки катетера 72 в сосудистую систему пациента через место 73 введения в кожу. На фиг.2 видно, что катетер 72 в целом включает проксимальную часть 74, остающуюся снаружи тела пациента, и дистальную часть 76, размещаемую внутри сосудистой системы пациента после окончания установки. Систему 10 применяют, чтобы в конечном счете установить дистальный кончик 76А катетера 72 в требуемое положение внутри сосудистой системы пациента. В одном из вариантов осуществления настоящего изобретения требуемое положение дистального кончика 76А катетера представляет собой положение вблизи сердца пациента, например, в нижней трети (1/3) верхней полой вены (Superior Vena Cava, SVC). Очевидно, система 10 может применяться и для установки дистального кончика катетера в других местоположениях. Проксимальная часть 74 катетера включает также коннектор 74А, обеспечивающий гидравлическое сообщение между одним или более внутренними каналами катетера 72 и одним или более удлинительными ножками 74 В, выходящими в проксимальном направлении из упомянутого коннектора.
[00056] Один из примеров реализации консоли 20 проиллюстрирован на фиг.8С, однако нужно понимать, что консоль может иметь множество различных форм. Процессор 22, включающий энергонезависимую память, например, EEPROM, входит в состав консоли 20 для управления функционированием системы во время работы системы 10, например, выступает в роли управляющего процессора. В состав консоли 20 включен также цифровой контроллер/аналоговый интерфейс 24, который осуществляет связь как с процессором 22, так и с другими компонентами системы для управления интерфейсом между зондом 40, датчиком 50 и другими компонентами системы.
[00057] Система 10 включает также порты 52 для соединения с датчиком 50 и опциональными компонентами 54, включающими принтер, носители для хранения данных, клавиатуру и т.п. Упомянутые порты в одном из вариантов осуществления настоящего изобретения представляют собой порты USB, хотя другие типы или комбинации типов портов также могут применяться для этого и других интерфейсных соединений, описанных в настоящем документе. Разъем 56 электропитания входит в состав консоли 20 для обеспечения функционального соединения с внешним источником 58 электропитания. Также может применяться внутренний аккумулятор 60, либо вместе с внешним источником электропитания, либо в качестве его замены. В состав цифрового контроллера/аналогового интерфейса 24 консоли входят схемы 59 управления электропитанием для регулирования потребления и распределения электропитания.
[00058] Дисплей 30 в данном варианте осуществления настоящего изобретения интегрирован с консолью 20 и используется для отображения информации врачу во время процедуры установки катетера. В другом варианте осуществления настоящего изобретения дисплей может быть отдельным от консоли. Далее можно видеть, что информация, отображаемая на дисплее 30, изменяется в соответствии с режимом, в котором работает система установка катетера: ультразвуковое наведение, TLS, или, в других вариантах осуществления настоящего изобретения, ЭКГ-подтверждение положения кончика. В одном из вариантов осуществления настоящего изобретения клавишный интерфейс 23 консоли (см. фиг.1, 8С) и клавиши, входящие в состав зонда 40, могут быть использованы врачом с целью немедленного вызова необходимого режима на дисплее 30 для помощи в процедуре установки. В одном из вариантов осуществления настоящего изобретения информация различных режимов, например, TLS и ЭКГ, может отображаться одновременно, как это проиллюстрировано на фиг.17. Таким образом, один дисплей 30 системной консоли 20 может применяться для ультразвукового наведения при доступе в сосудистую систему пациента, для TLS-наведения при продвижении катетера через сосудистую систему и (в других вариантах осуществления изобретения) ЭКГ-подтверждения правильности установки дистального кончика катетера относительно узла сердца пациента. В одном из вариантов осуществления настоящего изобретения дисплей 30 представляет собой устройство с жидкокристаллическим (LCD) экраном.
[00059] Фиг.3A и 3В иллюстрируют элементы зонда 40 в соответствии с одним из вариантов осуществления настоящего изобретения. Зонд 40 применяют в сочетании с первым упомянутым выше режимом, то есть ультразвуковой визуализацией сосуда, например, вены, при подготовке введения катетера 72 в сосудистую сеть. Такая визуализация обеспечивает ультразвуковое наведение в реальном времени при введении катетера в сосудистую сеть пациента и помогает минимизировать осложнения, обычно связанные с подобным введением, включая непреднамеренное повреждение артерий, гематому, пневмоторакс и т.п.
[00060] Портативный зонд 40 включает головку 80, содержащую пьезоэлектрическую матрицу для формирования ультразвуковых импульсов и для приема эхо-сигнала от них после отражения телом пациента, когда головка прижата к коже пациента вблизи планируемого места 73 введения (фиг.2). Зонд 40 включает также множество управляющих клавиш 84, которые могут входить в состав клавишной панели 82. В данном варианте осуществления настоящего изобретения управление режимом работы системы 10 может выполняться при помощи управляющих клавиш 84, что устраняет необходимость выхода врача из стерильного поля, сформированного вокруг места введения в тело пациента перед установкой катетера, для переключения режимов с использованием клавишного интерфейса 32 консоли.
[00061] В этой связи в одном из вариантов осуществления настоящего изобретения врач применяет первый режим (ультразвуковую визуализацию) для определения подходящего места введения и установления доступа в сосудистую систему, например, с использованием иглы или интродьюсера, а затем с помощью катетера. Впоследствии врач имеет возможность плавно переключиться путем нажатия клавиши на клавишной панели 82 зонда во второй режим (TLS) без необходимости выхода из стерильного поля. Режим TLS может использоваться в дальнейшем как помощь при продвижении катетера 72 через сосудистую систему к заданному местоположению.
[00062] На фиг.1 показано, что зонд 40 включает также контроллер 42 клавиш и памяти для управления работой клавиш и зонда. Контроллер 42 клавиш и памяти может включать энергонезависимую память, например, в одном из вариантов осуществления настоящего изобретения, EEPROM. Контроллер 42 клавиш и памяти функционально связан с интерфейсом 44 зонда консоли 20, который включает пьезокомпонент 44А ввода/вывода для взаимодействия с пьезоэлектрической матрицей зонда, а также компонент 44 В ввода/вывода клавиш и памяти для взаимодействия с контроллером 42 клавиш и памяти.
[00063] На фиг.4 показан пример снимка 88 экрана с изображением на дисплее 30, когда система 10 находится в первом режиме ультразвуковой визуализации. Показано изображение 90 подкожной области пациента 70, представляющее поперечное сечение вены 92. Изображение 90 сформировано за счет работы пьезоэлектрической матрицы зонда 40. Также на снимке 88 экрана дисплея отображен индикатор 94 шкалы глубины, предоставляющий информацию о глубине изображения 90 под кожей пациента, шкала 96 величины просвета, предоставляющая информацию о размере вены 92 в сравнении со стандартными размерами рабочего канала катетера, и другие индикаторы 98, предоставляющие информацию о состоянии системы 10, или возможных действиях, которые можно предпринять, например, стоп-кадр, шаблоны изображения, сохранение данных, печать изображения, состояние электропитания, яркость изображения и т.п.
[00064] Необходимо отметить, что хотя на изображении 40 показана вена, в других вариантах осуществления настоящего изобретения может формироваться изображение других полых органов тела. Следует отметить, что режим ультразвуковой визуализации, проиллюстрированный на фиг.4, может, при необходимости, отображаться на дисплее 30 одновременно с другими режимами, например, TLS-режимом. В дополнение к визуальному дисплею 30 в системе 10 для помощи врачу при установке катетера может также применяться звуковая информация, например, гудки, звуковые тоны и т.п. При этом, клавиши на зонде 40 и клавишный интерфейс 32 консоли могут быть конфигурированы множеством различных способов, включая применение в дополнение к клавишам таких органов управления для ввода данных пользователем, как ползунковые переключатели, перекидные переключатели, электронные или сенсорные панели и т.п. Дополнительно, как операции режима с ультразвуковой визуализацией, так и операции TLS-режима при использовании системы 10 могут выполняться одновременно или исключительно.
[00065] Как было описано, ультразвуковой зонд 40 применяют как часть комплексной системы 10 установки катетера для обеспечения ультразвуковой визуализации периферийной сосудистой системы пациента при подготовке к чрескожному введению катетера. В данном примере осуществления настоящего изобретения, однако, упомянутый зонд применяют также для управления функциональностью TLS-подсистемы, или второго режима системы 10, при направлении катетера к требуемому местоположению в сосудистой системе в соответствии с последующим описанием. Поскольку зонд 40 используют внутри стерильного поля пациента, эта особенность позволяет управлять функциональными возможностями TLS, находясь полностью внутри стерильного поля. Таким образом, зонд 40 представляет собой устройство двойного назначения, обеспечивая возможность удобно управлять функциональностью режима ультразвуковой визуализации и TLS-режима системы 10 из стерильного поля. В одном из вариантов осуществления настоящего изобретения упомянутый зонд может применяться также для управления частью или всеми функциональными возможностями, связанными с режимом ЭКГ, или третьим режимом системы 10 установки катетера в соответствии с дальнейшим более подробным описанием.
[00066] Система 10 установки катетера включает также упомянутый выше второй режим, то есть TLS, или систему определения положения кончика на основе магнитного взаимодействия. TLS позволяет врачу быстро находить и подтверждать положение и/или ориентацию катетера 72, например, периферически вводимого центрального катетера (peripherally-inserted central catheter, PICC), центрального венозного катетера (central venous catheter, CVC) или другого катетера, во время начального введения и продвижения через сосудистую систему пациента 70. А именно, TLS-режим обнаруживает магнитное поле, формируемое стилетом, оснащенным магнитным элементом и служащим для определения положения кончика, который в одном из вариантов осуществления настоящего изобретения предварительно загружают в продольно направленный внутренний канал катетера 72, что в общем случае позволяет врачу подтверждать местоположение и ориентацию кончика катетера в теле пациента. В одном из вариантов осуществления настоящего изобретения этот магнитный узел может отслеживаться с использованием концепций одного или более следующих патентов США: №5,775,322; №5,879,297; №6,129,668; №6,216,028 и №6,263,230. Содержимое упомянутых выше патентов США полностью включено в настоящее описание путем ссылки. В TLS-режиме отображается также направление, в котором указывает кончик катетера, что является дополнительной помощью при установке катетера. Также, TLS-режим помогает врачу при определении возникновения неправильного положения кончика катетера, например, в случае, когда кончик отклоняется от требуемого пути внутри вены в другую вену.
[00067] Как отмечалось, в режиме TLS для обеспечения возможности отслеживания катетера 72 при его продвижении через сосудистую систему применяют стилет. На фиг.5 приведен пример такого стилета 100, включающего проксимальный конец 100А и дистальный конец 100В. В состав проксимального конца 100А стилета входит рукоятка с проволочным сердечником 104, выходящим из нее в дистальном направлении. Магнитный узел расположен дистально относительно проволочного сердечника 104. Магнитный узел включает один или более магнитных элементов 106, расположенных смежно друг относительно друга вблизи дистального конца 100В стилета и охваченных трубкой 108. В данном варианте осуществления настоящего изобретения используется множество магнитных элементов 106, при этом каждый элемент представляет собой твердый ферромагнетик цилиндрической формы, состыкованный торец в торец с другими магнитными элементами. Кончик 110 из клейкого материала может заполнять дистальный конец трубки 108, дистально по отношению к магнитным элементам 106.
[00068] Следует отметить, что в других вариантах осуществления настоящего изобретения упомянутые магнитные элементы могут отличаться от данной схемы не только формой, но и также составом, размером, типом магнитного материала и расположением в дистальном сегменте стилета. Например, в одном из вариантов осуществления настоящего изобретения множество магнитных элементов из ферромагнетика заменены на электромагнитный узел, например, электромагнитный виток, который формирует магнитное поле, обнаруживаемое датчиком. Еще один пример узла, который может быть использован в данном случае, описан в патенте США №5,099,845, озаглавленном «Средства определения местоположения медицинского инструмента», содержание которого полностью включено в настоящее описание путем ссылки. Другие примеры стилетов, включающих магнитные элементы и допускающих использование вместе с TLS-режимом, могут быть найдены в заявке на патент США №11/466,602, поданной 23 августа 2006 года и озаглавленной «Устройства и способы изготовления стилетов», которая полностью включена в настоящее описание путем ссылки. Соответственно, эти и другие вариации предусматриваются вариантами осуществления настоящего изобретения. Следует понимать, что термин «стилет», использованный в настоящем документе, может включать любое из множество устройств, конфигурированных для установки, с возможностью съема, во внутреннем канале катетера для помощи при установке дистального конца катетера в требуемое местоположение внутри сосудистой системы пациента.
[00069] Фиг.2 иллюстрирует размещение стилета 100 по существу во внутреннем канале катетера 72 таким образом, что его проксимальная часть выходит в проксимальном направлении из внутреннего канала катетера через коннектор 74А и наружу через одну выбранную ножку из множества удлинительных ножек 74В. Размещенный таким образом во внутреннем канале катетера дистальный конец 100 В стилета 100 по существу совпадает (котерминален) с дистальным концом 76А катетера, так что обнаружение системой TLS дистального конца стилета соответственно указывает на местоположение дистального конца катетера.
[00070] Датчик 50 TLS применяется системой 10 во время работы системы TLS для обнаружения магнитного поля, порождаемого магнитными элементами 106 стилета 100. Как показано на фиг.2, датчик 50 TLS установлен на груди пациента во время введения катетера. Датчик 50 TLS устанавливают на груди пациента в заранее заданном местоположении, например, при помощи внешних опознавательных точек на теле пациента, чтобы обеспечить возможность обнаружения магнитного поля магнитных элементов 106 стилета, размещенных в катетере 72, как описано выше, во время прохождения катетера через сосудистую систему пациента. Поскольку магнитные элементы 106 магнитного узла стилета являются котерминальными с дистальным концом 76А катетера 72 (фиг.2), обнаружение датчиком 50 TLS магнитного поля этих магнитных элементов дает врачу информацию о положении и ориентации дистального конца катетера во время его продвижения.
[00071] Более детально, датчик 50 TLS функционально связан с консолью 20 системы 10 через один или более из портов 52, как показано на фиг.1. Следует отметить, что могут также без ограничений применяться другие схемы соединения между датчиком TLS и системной консолью. В соответствии с только что приведенным описанием, магнитные элементы 106 применяют в стилете 100 для обеспечения возможности наблюдения за положением дистального конца 76А катетера (фиг.2) относительно датчика 50 TLS, расположенного на груди пациента. Обнаружение датчиком 50 TLS магнитных элементов 106 стилета графически отображается на дисплее 30 консоли 20 во время работы в режиме TLS. Таким образом, врач, устанавливающий катетер, может в общем определять местоположение дистального конца 76А катетера в сосудистой системе пациента относительно датчика 50 TLS и обнаруживать неправильное положение катетера, например, продвижение катетера по нежелательной вене.
[00072] Фиг.6 и 7А-7Е иллюстрируют примеры значков, которые могут использоваться на дисплее 30 консоли для отображения магнитных элементов 106 стилета, обнаруживаемых датчиком 50 TLS. В частности, на фиг.6 показан значок 114, отображающий дистальную часть стилета 100, включающую магнитные элементы 106, когда он обнаруживается датчиком 50 TLS при расположении этих магнитных элементов под датчиком TLS. Поскольку дистальный конец 100 В по существу котерминален с дистальным концом катетера 72, значок указывает положение и ориентацию дистального конца катетера. Фиг.7А-7Е иллюстрируют различные значки, которые могут отображаться на дисплее 30 консоли, когда магнитные элементы 106 стилета 100 не расположены непосредственно под частью датчика 50 TLS, но тем не менее, обнаружены неподалеку. Значки могут включать полу-значки 114А и четверть-значки 114В, которые отображаются в соответствии с положением магнитного узла стилета, то есть магнитных элементов 106 в данном варианте осуществления настоящего изобретения, относительно датчика 50 TLS.
[00073] Фиг.8А-8С иллюстрируют снимки экрана, снятые с дисплея 30 системы 10 в TLS-режиме, на которых видно, как отображается магнитный узел стилета 100. Снимок 118 экрана на фиг.8А иллюстрирует изображение 120, представляющее датчик 50 TLS. На снимке 118 экрана представлена и другая информация, включающая индикатор 124 шкалы глубины, индикаторы 126 состояния/действий и значки 128, соответствующие клавишному интерфейсу 32, входящему в состав консоли 20 (фиг.8С). Несмотря на то, что значки 128 в данном варианте осуществления настоящего изобретения являются всего лишь указателями для помощи пользователю в определении назначения соответствующих клавиш клавишного интерфейса 32, в другом варианте осуществления настоящего изобретения могут быть сделаны сенсорными, так что сами значки могут работать как клавишный интерфейс и могут меняться в соответствии с режимом работы системы.
[00074] На начальной стадии продвижения катетера через сосудистую систему пациента после введения катетера в нее, дистальный конец 76А катетера 72, с которым по существу котерминален дистальный конец 100 В стилета, является относительно удаленным от датчика 50 TLS. Соответственно, на снимке экрана будет отображено сообщение «нет сигнала» ("no signal"), указывающее на то, что магнитное поле магнитного узла стилета не обнаружено. На фиг.8В магнитный узел, размещенный вблизи дистального конца 100 В стилета, продвинулся достаточно близко к датчику 50 TLS, чтобы быть им обнаруженным, однако еще не находится под датчиком. Это отображается полу-значком 114А, который показан слева от изображения 120 датчика, что указывает на положение магнитного узла стилета справа отдатчика 50 при взгляде со стороны пациента.
[00075] На фиг.8С магнитный узел, размещенный вблизи дистального конца 100В стилета, был продвинут под датчик 50 TLS так, что его положение и ориентация относительно датчика обнаруживаются им. Это отображено значком 114 на изображении 120 датчика. Следует отметить, что значки 128 клавиш предоставляют указания на действия, которые могут быть выполнены, если нажать соответствующие клавиши клавишного интерфейса 32 консоли. В этой связи значки 128 клавиш могут изменяться в соответствии с режимом, в котором находится система 10, благодаря чему обеспечивается гибкость применения клавишного интерфейса 32. Также следует отметить, что поскольку клавишная панель 82 зонда 40 (фиг.3A, 3В) включает клавиши 84, повторяющие несколько клавиш клавишного интерфейса 32, то значки 128 клавиш на дисплее 30 помогают врачу управлять системой 10 с использованием клавиш 84 зонда, оставаясь в стерильном поле. Например, если врачу нужно выйти из TLS-режима и вернуться в режим ультразвуковой визуализации, может быть нажата соответствующая управляющая клавиша 84 на клавишной панели 82 зонда, при этом немедленно будет вызван режим ультразвуковой визуализации, а дисплей 30 будет обновлен для размещения визуальной информации, сопутствующей функциональности ультразвуковой визуализации, например, как показано на фиг.4. Это может быть выполнено без необходимости выхода врача за стерильное поле.
[00076] Далее приведены ссылки на фиг.9 и 10 для описания комплексной системы 10 установки катетера в соответствии с другим вариантом осуществления настоящего изобретения. Как и раньше, комплексная система 10 включает консоль 20, дисплей 30, зонд 40 для функциональности режима ультразвуковой визуализации, а также датчик 50 TLS для функциональности определения положения кончика в соответствии с предшествующим описанием. Следует отметить, что проиллюстрированная на фиг.9 и 10 система 10 во многих отношениях сходна с системой, проиллюстрированной на фиг.1 и 2. Соответственно, ниже будут рассмотрены только выбранные отличия. Система 10, показанная на фиг.9 и 10, включает дополнительную функциональность, благодаря которой возможно определение близости дистального кончика 76А катетера к синоатриальному узлу (sino-atrial, SA) или к другом узлу сердца пациента 70, являющегося источником импульсов, что повышает возможность точной установки дистального кончика катетера в требуемое местоположение вблизи упомянутого узла. Упомянутый третий режим системы 10, называемый также в настоящем описании «ЭКГ» или «подтверждение местоположения кончика на основе ЭКГ», обеспечивает возможность обнаружения ЭКГ-сигналов от синоатриального узла для обеспечения установки дистального кончика катетера в требуемое положение в сосудистой системе пациента. Следует отметить, что режимы ультразвуковой визуализации (US), TLS и ЭКГ скомбинированы в настоящей системе 10 как единое целое и могут применяться для помощи при установке катетера в сочетании или по отдельности.
[00077] Фиг.9 и 10 иллюстрируют дополнение к системе 10 в виде стилета 130, конфигурированного в соответствии с данным вариантом осуществления настоящего изобретения. Кратко, стилет 130 катетера заранее размещен, с возможностью съема, во внутреннем канале катетера 72, который вводят в тело пациента 70 через место 73 введения. Стилет 130, в дополнение к наличию в его составе магнитного узла для TLS-режима на основе магнитного взаимодействия, включает ЭКГ-датчик вблизи его дистального конца, а также включает часть, котерминальную с дистальным концом кончика катетера для обнаружения ЭКГ-сигналов, формируемых синоатриальным узлом. В отличие от предыдущего варианта осуществления настоящего изобретения стилет 130 включает кабель 134, выходящий из его проксимального конца и обеспечивающий функциональное соединение с датчиком 50 TLS. В соответствии с дальнейшим более подробным описанием кабель 134 стилета обеспечивает возможность передачи ЭКГ-сигналов, обнаруживаемых узлом датчика ЭКГ на дистальной части стилета 130, в датчик 50 TLS при подтверждении местоположения кончика катетера как части функциональности режима подтверждения местоположения кончика на основе ЭКГ-сигнала. Пары 158 выводов/электродов опорного сигнала и сигнала заземления ЭКГ крепятся к телу пациента 70 и функционально связаны с датчиком 50 TLS, что позволяет системе отфильтровывать высокоуровневую электрическую активность, не связанную с электрической активностью синоатриального узла сердца, что дает возможность использовать функциональность подтверждения местоположения кончика на основе ЭКГ-сигнала. Вместе с опорным сигналом и сигналом заземления, принимаемым от пары 158 выводов/электродов ЭКГ, установленных на коже пациента, ЭКГ-сигналы, обнаруживаемые ЭКГ-датчиком стилета, принимаются датчиком 50 TLS, расположенным на груди пациента (фиг.10). Датчик 50 TLS и/или процессор 20 консоли может обрабатывать данные сигнала ЭКГ с формированием графика электрокардиограммы на дисплее 30, как будет описано далее. В случае, когда датчик 50 TLS обрабатывает данные ЭКГ-сигнала, для выполнения требуемой функциональности в его состав включают процессор. Если данные ЭКГ-сигнала обрабатывает консоль 20, то для обработки этих данных может применяться процессор 22, контроллер 24 или другой процессор.
[00078] Таким образом, при продвижении через сосудистую систему пациента катетер 72, оснащенный стилетом 130 в соответствии с предшествующим описанием, может быть продвинут под датчик 50 TLS, который расположен на груди пациента, как показано на фиг.10. Это позволяет датчику 50 TLS обнаруживать положение магнитного узла стилета 130, который по существу котерминален с дистальным кончиком 76А катетера в сосудистой системе пациента. Обнаружение датчиком 50 TLS магнитного узла стилета отображается на дисплее 30 в режиме ЭКГ. Дисплей 30 в режиме ЭКГ отображает также график электрокардиограммы, формируемый на основе электрической активности сердца пациента, регистрируемой узлом ЭКГ-датчика стилета 130. Более подробно, электрическая активность ЭКГ синоатриального узла, включающая волну Р электрокардиограммы, регистрируется узлом ЭКГ-датчика стилета (описанным ниже) и передается в датчик 50 TLS, а также в консоль 20. Электрическая активность ЭКГ затем обрабатывается для отображения на дисплее 30. Впоследствии врач, устанавливающий катетер, может наблюдать данные ЭКГ для определения оптимального положения дистального кончика 76А катетера 72, например, в одном из вариантов осуществления настоящего изобретения, вблизи синоатриального узла. В одном из вариантов осуществления настоящего изобретения консоль 20 включает такие электронные компоненты, как процессор 22 (фиг.9), необходимый для приема и обработки сигналов, обнаруживаемых узлом датчика ЭКГ стилета. В другом варианте осуществления настоящего изобретения необходимые для обработки ЭКГ-сигналов электронные компоненты могут входить в состав датчика 50 TLS.
[00079] Как было рассмотрено выше, дисплей 30 применяют для отображения информации врачу во время процедуры установки катетера. Содержимое дисплея 30 изменяется в соответствии с режимом, в котором находится система установки катетера: ультразвуковой визуализации, TLS или ЭКГ. Любой из этих трех режимов может быть мгновенно вызван на дисплей 30 врачом, при этом в некоторых случаях информация нескольких режимов, например TLS и ЭКГ, может отображаться одновременно. В одном из вариантов осуществления настоящего изобретения, как и ранее, режим системы может переключаться с помощью управляющих клавиш 84, входящих в состав портативного зонда 40, что устраняет необходимость выхода врача из стерильного поля (например, прикосновения к клавишному интерфейсу 32 консоли 20) для переключения режима. Таким образом, в данном варианте осуществления настоящего изобретения зонд 40 применяют в том числе и для управления частью функциональности системы 10, связанной с ЭКГ-режимом, или всей этой функциональностью. Следует отметить, что для управления функциональностью системы может также использоваться клавишный интерфейс 32 или другие конфигурации устройств ввода данных. Также, в дополнение к визуальному дисплею 30 в системе для помощи врачу при установке катетера может использоваться звуковая информация, например, гудки, звуковые тоны и т.п.
[00080] Далее, обратимся к фиг.11-12Е для описания различных деталей одного из вариантов осуществления стилета 130, загруженного, с возможностью съема, в катетер 72 и применяемого во время введения катетера для установки его дистального кончика 76А в требуемое местоположение в сосудистой системе пациента. Как показано на чертеже, стилет 130, удаленный из катетера, имеет проксимальный конец 130А и дистальный конец 130В. В составе проксимального конца 130А стилета имеется соединитель 132, при этом кабель 134 выходит в дистальном направлении из упомянутого соединителя и крепится к рукоятке 136. Проволочный сердечник 138 выходит в дистальном направлении из рукоятки 136. Стилет 130 в одном из вариантов осуществления настоящего изобретения заранее устанавливают во внутреннем канале катетера 72 так, что его дистальный конец 130 В по существу совпадает, или является котерминальным, с отверстием катетера на его дистальном конце 76А (фиг.10), а проксимальная часть проволочного сердечника 138, рукоятка 136 и кабель 134 выходят в проксимальном направлении из одной выбранной трубки из множества удлинительных трубок 74В. В данном случае описан стилет, однако нужно отметить, что в других вариантах осуществления настоящего изобретения проволочный направитель или другое устройство для направления катетера также могут включать принципы его осуществления.
[00081] Упомянутый проволочный сердечник 138 имеет удлиненную форму и состоит из подходящего материала стилета, включающего нержавеющую сталь или материал с памятью формы, например, в одном из вариантов осуществления настоящего изобретения сплав, содержащий никель и титан, более известный под сокращенным названием «нитинол». Несмотря на то, что это не проиллюстрировано в настоящем описании, изготовление проволочного сердечника 138 из нитинола в одном из вариантов осуществления настоящего изобретения позволяет части проволочного сердечника, соответствующей дистальному сегменту стилета, иметь заранее сформированную изогнутую конфигурацию, которая придает аналогичную изогнутую конфигурацию дистальной части катетера 72. В других вариантах осуществления настоящего изобретения проволочный сердечник не имеет заранее заданной формы. Также, конструкция из нитинола обеспечивает вращаемость проволочного сердечника 138, что позволяет манипулировать дистальным сегментом стилета 130, когда он находится в рабочем канале катетера 72, что в свою очередь позволяет проводить дистальную часть катетера через сосудистую систему при введении катетера.
[00082] Рукоятка 136 выполнена для обеспечения возможности введения/удаления стилета из катетера 72. В вариантах осуществления настоящего изобретения, где проволочный сердечник 138 является вращаемым, рукоятка 136 обеспечивает также возможность поворота проволочного сердечника во внутреннем канале катетера 72 для облегчения проведения дистальный части катетера через сосудистую систему пациента 70.
[00083] Рукоятка 136 крепится к дистальному концу кабеля 134. В данном варианте осуществления настоящего изобретения кабель 134 представляет собой гибкий кабель в оболочке, содержащий один или более проволочных проводников, электрически связанных с проволочным сердечником 138, который выполняет роль упомянутого выше узла датчика ЭКГ, а также с кабельным соединителем 132. В этой связи, кабель 134 обеспечивает проводящий путь от дистальной части проволочного сердечника 138 через кабельный соединитель 132 к проксимальному концу стилета 130. Как будет показано, кабельный соединитель 132 конфигурирован для обеспечения функциональной связи с датчиком 50 TLS на груди пациента для помощи при продвижении дистального кончика 76А катетера в требуемое местоположение в сосудистой системе пациента.
[00084] Как можно видеть на фиг.12B-12D дистальная часть проволочного сердечника 138 постепенно сужается, или уменьшается в диаметре, в дистальном направлении относительно точки 142 соединения. На часть проволочного сердечника, имеющую уменьшенный диаметр, натянут рукав 140. Хотя в данном варианте осуществления настоящего изобретения упомянутый рукав имеет сравнительно большой диаметр, в другом варианте осуществления настоящего изобретения рукав может иметь размер, по существу совпадающий с диаметром проксимальной части проволочного сердечника стилета. Стилет 130 включает также магнитный узел, расположенный вблизи его дистального конца 130 В для использования в режиме TLS. Магнитный узел в проиллюстрированном варианте осуществления настоящего изобретения включает множество магнитных элементов 144, расположенных между внешней поверхностью проволочного сердечника 138 с уменьшенным диаметром и внутренней поверхностью рукава 140 вблизи дистального конца 130 В стилета. В данном варианте осуществления настоящего изобретения магнитные элементы 144 включают 20 магнитов из твердого ферромагнетика цилиндрической формы, состыкованных торец в торец, способом, аналогичным стилету 100, показанному на фиг.2. В других вариантах осуществления настоящего изобретения магнитный элемент (или элементы) могут иметь конструкцию, отличающуюся не только формой, но также и составом, количеством, размером, типом магнитного материала, а также положением в стилете. Например, в одном из вариантов осуществления настоящего изобретения множество магнитов магнитного узла заменено на электромагнитный виток, порождающий магнитное поле, которое обнаруживается датчиком TLS. Соответственно, эти и другие вариации предусматриваются вариантами осуществления настоящего изобретения.
[00085] Магнитные элементы 144 применяют в дистальной части стилета 130 для обеспечения возможности наблюдения за положением дистального конца 130 В стилета относительно датчика 50 TLS, расположенного на груди пациента. Как отмечалось, датчик 50 TLS конфигурирован для обнаружения магнитного поля магнитных элементов 144 при продвижении стилета вместе с катетером 72 через сосудистую систему пациента. Таким образом, врач, устанавливающий катетер 72, может в общем определять местоположение дистального конца 76А катетера в сосудистой системе пациента и обнаруживать возникновение неправильного положения катетера, например, продвижение катетера по нежелательной вене.
[00086] Стилет 130 в соответствии с одним из вариантов осуществления настоящего изобретения включает также упомянутый выше узел датчика ЭКГ. Узел датчика ЭКГ обеспечивает возможность применения стилета 130, размещенного в рабочем канале катетера 72 при его введении, для обнаружения внутрипредсердного ЭКГ-сигнала, порождаемого синоатриальным или иным узлом сердца пациента, что позволяет проводить дистальный кончик 76А катетера 72 в заранее заданное местоположение в сосудистой системе пациента вблизи его сердца. Таким образом, узел датчика ЭКГ служит как вспомогательное средство при подтверждении правильности установки дистального кончика 76А катетера.
[00087] В одном из вариантов осуществления настоящего изобретения, проиллюстрированном на фиг.11-12Е, узел датчика ЭКГ включает дистальную часть проволочного сердечника 138, размещенную вблизи дистального конца 130В стилета. Проволочный сердечник 138 является электропроводным и обеспечивает возможность обнаружения ЭКГ-сигналов его дистальным концом, а также их передачу в проксимальном направлении вдоль проволочного сердечника. Проводящий материал 146, например, проводящая эпоксидная смола, заполняет дистальную часть рукава 140 вплотную к дистальному окончанию проволочного сердечника для обеспечения электропроводного соединения с дистальным концом проволочного сердечника. Это, в свою очередь, увеличивает проводящую поверхность дистального конца 130 В стилета 130, что улучшает его способность обнаруживать ЭКГ-сигналы.
[00088] Перед установкой катетера стилет 130 загружают во внутренний канал катетера 72. Следует отметить, что стилет 130 может поставляться уже загруженным во внутренний канал катетера от производителя, или загружаться в катетер врачом перед введением катетера. Стилет 130 размещен во внутреннем канале катетера таким образом, что дистальный конец 130В стилета 130 по существу котерминален с дистальным кончиком 76А катетера 72, за счет чего дистальные кончики как стилета, так и катетера по существу выровнены друг с другом. Котерминальность катетера 72 и стилета 130 позволяет магнитном узлу работать с датчиком 50 TLS в режиме TLS для отслеживания положения дистального кончика 76А катетера при его продвижении в сосудистой системе пациента, как было описано. Тем не менее, следует отметить, что для функциональности подтверждения местоположения кончика в системе 10 дистальный конец 130В стилета 130 не обязательно должен быть котерминальным с дистальным концом 76А катетера. Таким образом, единственное необходимое условие заключается в установлении проводящего пути между сосудистой системой и узлом датчика ЭКГ, в данном случае - проволочным сердечником 138, так, чтобы электрические импульсы синоатриального узла или другого узла сердца пациента могли быть обнаружены. Этот проводящий путь в одном из вариантов осуществления настоящего изобретения может включать различные компоненты, включая солевой раствор, кровь и т.п.
[00089] В одном из вариантов осуществления настоящего изобретения после введения катетера 72 в сосудистую систему пациента через место 73 введения (фиг.10) может применяться TLS-режим системы 10 в соответствии с предшествующим описанием для продвижения дистального кончика 76А катетера к его заданному местоположению вблизи синоатриального узла. При приближении к области сердца система 10 может быть переключена в режим ЭКГ для обеспечения возможности обнаружения ЭКГ-сигналов, испускаемых синоатриальным узлом. При продвижении катетера с загруженным в него стилетом в сторону сердца пациента элекропроводный узел датчика ЭКГ, включающий дистальный конец проволочного сердечника 138 и проводящий материал 146, начинает обнаруживать электрические импульсы, формируемые синоатриальным узлом. В этой связи узел датчика ЭКГ выполняет роль электрода для обнаружения ЭКГ-сигналов. Удлиненный проволочный сердечник 138 вблизи дистального конца проволочного сердечника выполняет роль проводящего пути для передачи электрических импульсов, формируемых синоатриальным узлом и принимаемых узлом датчика ЭКГ, в кабель 134.
[00090] Кабель 134 передает ЭКГ-сигналы в датчик 50 TLS, временно установленный на груди пациента. Кабель 134 функционально связан с датчиком 50 TLS при помощи кабельного соединителя 132 или другой подходящей прямой или опосредованной соединительной конфигурации. Как уже было описано, ЭКГ-сигнал затем может быть обработан и отображен на системном дисплее 30 (фиг.9, 10). Контроль ЭКГ-сигнала, принимаемого датчиком 50 TLS и отображаемого дисплеем 30, позволяет врачу наблюдать и анализировать изменения сигнала при продвижении дистального кончика 76А катетера в сторону синоатриального узла. Когда принятый ЭКГ-сигнал соответствует требуемому профилю, врач может сделать вывод, что дистальный кончик 76А катетера достиг требуемого положения относительно синоатриального узла. Как отмечалось, в одном из вариантов осуществления настоящего изобретения это требуемое положение находится в нижней трети (1/3) SVC.
[00091] Узел датчика ЭКГ и магнитный узел могут работать во взаимодействии для помощи врачу при установке катетера в сосудистой системе пациента. В общем случае магнитный узел стилета 130 помогает врачу выполнять общее продвижение по сосудистой системе от исходного места введения катетера, чтобы поместить дистальный кончик 76А катетера 72 приблизительно в область сердца пациента. Узел датчика ЭКГ может применяться после этого для направления дистального конца 76А катетера в требуемое положение внутри SVC, обеспечивая врачу возможность наблюдать изменения ЭКГ-сигналов, формируемых сердцем при приближении датчика ЭКГ стилета к синоатриальному узлу. Как только наблюдается подходящий профиль ЭКГ-сигнала, врач может делать вывод, что дистальные концы стилета 130 и катетера 72 достигли требуемого местоположения относительно сердца пациента. После достижения требуемого положения катетер 72 может быть закреплен на месте, а стилет 130 удален из внутреннего канала катетера. Здесь следует отметить, что в дополнение к явно рассмотренному в настоящем описании стилет может иметь одну из множества отличающихся конфигураций. В одном из вариантов осуществления настоящего изобретения стилет может быть соединен напрямую с консолью, вместо опосредованного соединения через датчик TLS. В другом варианте осуществления настоящего изобретения конструкция стилета 130, обеспечивающая его функциональность в TLS-режиме и ЭКГ-режиме, может быть встроена непосредственно в конструкцию катетера. Например, магнитный узел и/или узел датчика ЭКГ в одном из вариантов осуществления настоящего изобретения могут быть встроены в стенки катетера.
[00092] Фиг.13А-15 иллюстрируют различные детали, связанные с передачей данных ЭКГ-сигнала из кабеля 134 стилета в датчик 50 TLS, расположенный на груди пациента, в соответствии с данным вариантом осуществления настоящего изобретения. А именно, данный вариант осуществления настоящего изобретения подразумевает прохождение данных ЭКГ-сигнала из стерильного поля вокруг катетера 72 и места 73 введения, включающего стилет 130 и кабель 134, в нестерильное поле, например, грудь пациента, на которой размещен датчик TLS. Упомянутая передача данных не должна нарушать стерильное поле или ставить под угрозу его стерильность. Стерильная салфетка, размещенная на пациенте 70 в течение процедуры введения катетера, задает большую часть стерильного поля: области выше салфетки являются стерильными, тогда как области под ней (за исключением места введения и непосредственно прилегающей области) являются нестерильными. Можно заметить, что приведенное ниже описание включает по меньшей мере первый узел связи, ассоциированный со стилетом 130, и второй узел связи, ассоциированный с датчиком 50 TLS, которые функционально связаны друг с другом для обеспечения передачи данных ЭКГ-сигнала между ними.
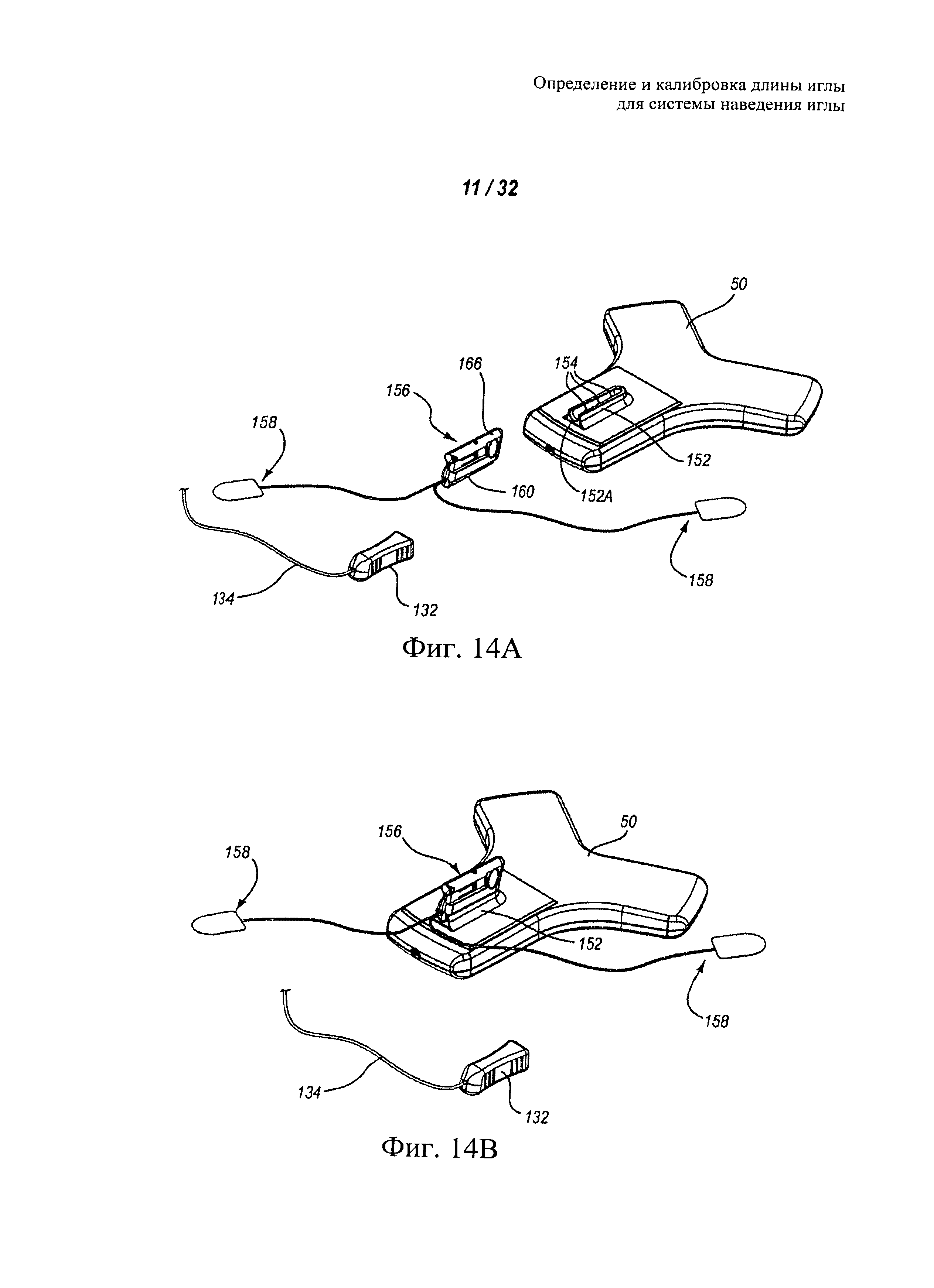
[00093] Один из вариантов осуществления настоящего изобретения, обеспечивающий передачу данных ЭКГ-сигнала из стерильного поля в нестерильное поле без нарушения стерильности первого, проиллюстрирован на фиг.13А-15, где показана реализация «через хирургическую салфетку», также называемая «ножевым разъемом». В частности, фиг.14А иллюстрирует датчик 50 TLS в соответствии с предшествующим описанием, предназначенный для установки на груди пациента во время процедуры введения катетера. Датчик 50 TLS включает на своей верхней поверхности основание 152 разъема, образующее канал 152А, в котором расположены три электрических контакта 154 основания. Ножевой соединитель 156, показанный также на фиг.13A-13D, имеет размеры, позволяющие принимать его, со скольжением, в канале 152а основания 152 разъема в соответствии с иллюстрацией фиг.14 В и 15. Две пары 158 выводов/электродов ЭКГ-сигнала выходят из ножевого разъема 156 для установки на плечо и торс или в других подходящих внешних точках на теле пациента. Проходящий через салфетку кабельный соединитель 132 конфигурирован для сопряжения, со скольжением, с частью ножевого разъема 156 в соответствии с последующим более подробным описанием для получения проводящего пути от стилета 120 через стерильное поле к датчику 50 TLS.
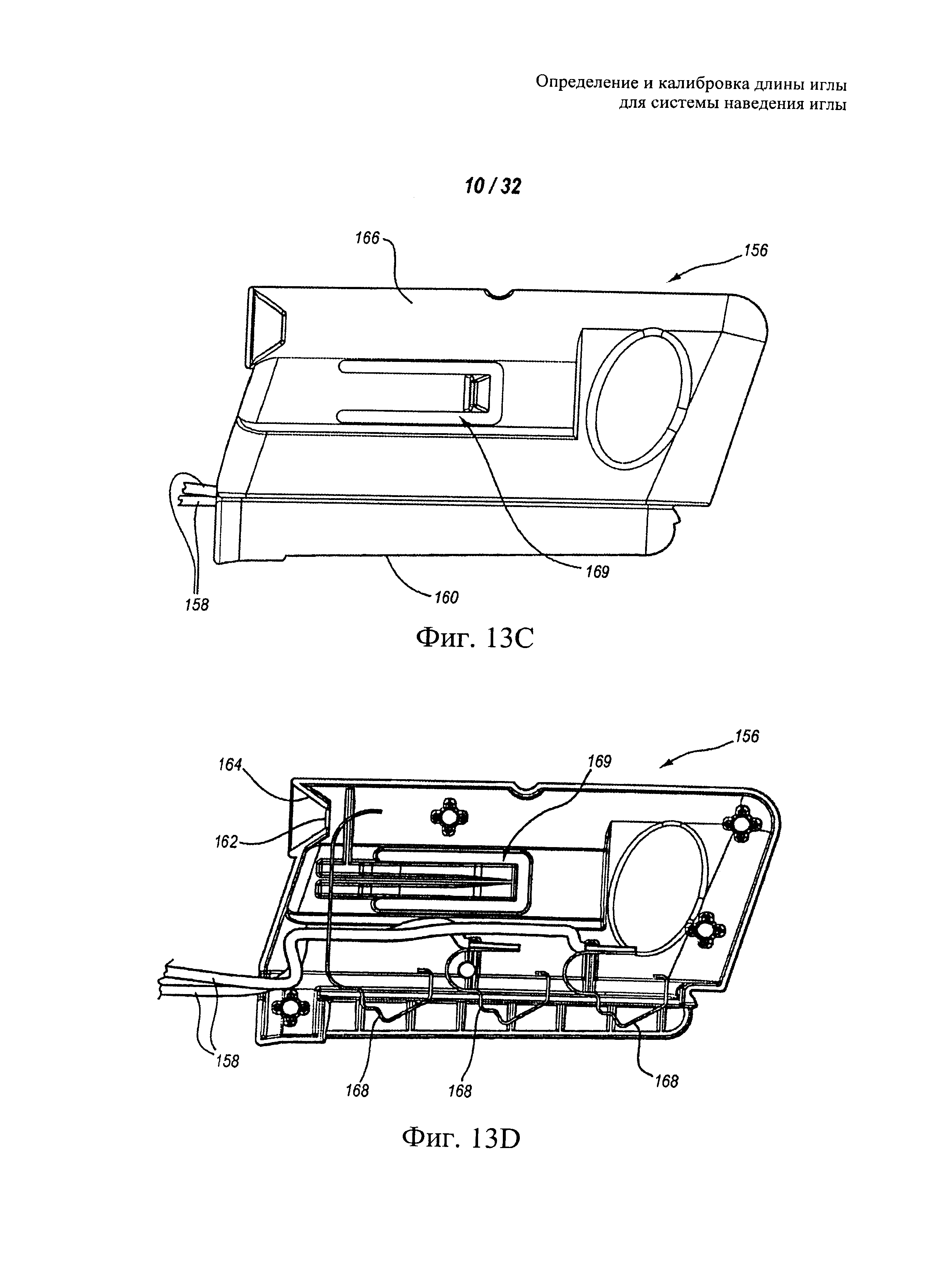
[00094] Фиг.13A-13D иллюстрируют дополнительные аспекты ножевого соединителя 156. В частности, ножевой соединитель 156 имеет нижнюю бочкообразную часть 160, размер которой позволяет принимать ее в канале 152А основания 152 разъема (фиг.14В, 15). Отверстие 162, окруженное центрирующим конусом 164 расположено на заднем конце верхней бочкообразной части 166. Верхняя бочкообразная часть 166 имеет размеры, позволяющие ей принимать кабельный соединитель 132 стилета 130 (фиг.14С, 15), так что штырьковый контакт 170, входящий в канал 172 кабельного соединителя 132 (фиг.15) направляется центрирующим отверстием до его посадки в отверстие 162 ножевого соединителя, что обеспечивает взаимное соединение кабельного соединителя и ножевого соединителя. Сопрягающий элемент, например, сопрягающий элемент 169, проиллюстрированный на фиг.13С и 13D, может входить в состав ножевого соединителя 156 для сопряжения с соответствующим элементом на кабельном разъеме 132 для помощи поддержания соединения между этими двумя компонентами.
[00095] На фиг.13D показано, что ножевой соединитель 156 включает множество электрических контактов 168. В данном варианте осуществления настоящего изобретения в его состав входят три контакта 168: два передних контакта, обеспечивающих электрическое соединение с терминальным концом одного из выводов 158 ЭКГ, и задний контакт, выступающий по оси в сторону отверстия 162 и обеспечивающий электрическое соединение со штыревым контактом 170 кабельного разъема 132, когда последний сопряжен с ножевым соединителем 156 (фиг.15). Нижняя часть каждого из контактов 168 ножевого соединителя 156 имеет положение, обеспечивающие электрическое соединение с соответствующими контактами 154 упомянутого основания 152 разъема датчика TLS.
[00096] На фиг.14В показан первый шаг соединения, на котором ножевой соединитель 156 сопряжен, с возможностью съема, с основанием 152 разъема на датчике TLS путем соединения, со скольжением, нижней бочкообразной части 160 ножевого разъема с каналом 152А основания разъема. Такое сопряжение обеспечивает электрическое соединение контактов 154 основания разъема с соответствующими контактами 168 ножевого соединителя.
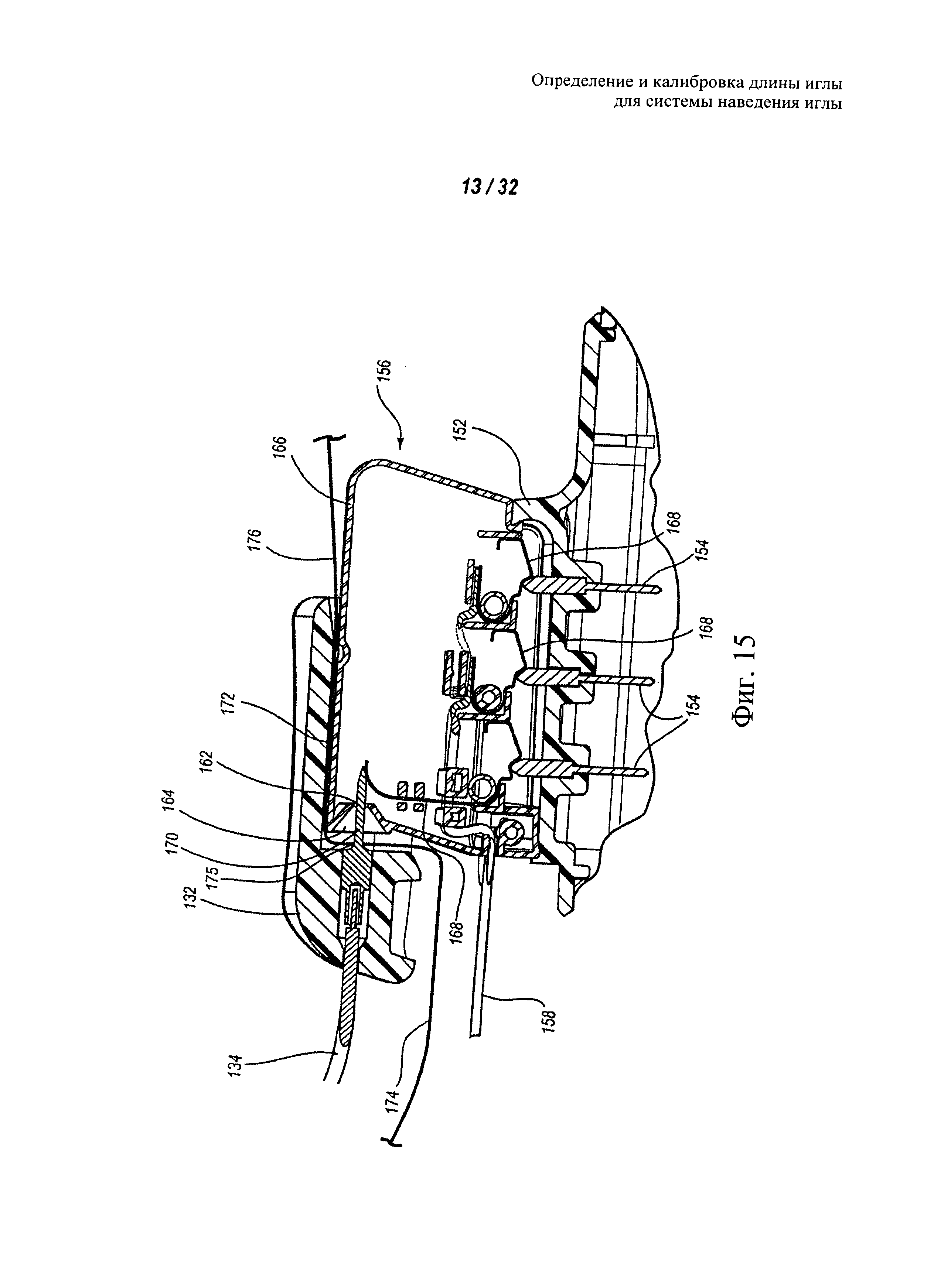
[00097] Фиг.14С иллюстрирует второй шаг соединения, на котором кабельный разъем 132 сопряжен, с возможностью соединения, с ножевым соединителем 156 путем соединения, со скольжением, канала 172 кабельного соединителя с верхней бочкообразной частью 166 ножевого соединителя. Такое сопряжение обеспечивает электрическое соединение штыревого контакта 170 кабельного соединителя с задним контактом 168 ножевого соединителя 156, что лучше всего можно видеть на фиг.15. В данном варианте осуществления настоящего изобретения продольное скользящее перемещение кабельного соединителя 132 относительно ножевого соединителя 156 при обеспечении их сопряжения осуществляется в том же направлении, что и при сопряжении, со скольжением, ножевого соединителя с каналом 152А основания разъема датчика (фиг.14В). В одном из вариантов осуществления настоящего изобретения один или оба из стилета 130/кабельного соединителя 132 и ножевого соединителя 156 являются одноразовыми. Также, в одном из вариантов осуществления настоящего изобретения кабельный соединитель может сопрягаться с ножевым разъемом после сопряжения ножевого разъема с датчиком TLS, тогда как в других вариантах осуществления настоящего изобретения кабельный разъем может сначала сопрягаться с ножевым соединителем через хирургическую салфетку перед сопряжением ножевого соединителя с датчиком TLS.
[00098] В схеме соединений, показанной на фиг.14С, стилет 130 функционально связан с датчиком 50 TLS через кабельный соединитель 132, что обеспечивает возможность передачи узлом датчика ЭКГ стилета сигналов ЭКГ в датчик TLS. В дополнение, пары 158 выводов/электродов ЭКГ функционально соединены с датчиком 50 TLS. В одном из вариантов осуществления настоящего изобретения, соответственно, кабельный соединитель 132 называется первым узлом связи для узла 130, тогда как ножевой соединитель 156 называется вторым узлом связи для датчика 50 TLS.
[00099] Следует отметить, что для установления функциональной связи между стилетом и датчиком TLS могут использоваться другие различные схемы и конструкции. Например, в кабельном соединителе вместо штыревого контакта для проникновения через салфетку может применяться пластинчатый контакт. Как вариант, ножевой соединитель может быть выполнен в качестве неотъемлемой части датчика TLS. Эти и другие конфигурации, соответственно, не выходят за рамки настоящего изобретения.
[000100] Как показано на фиг.15, стерильная салфетка 174, применяемая при установке катетера для формирования стерильного поля, расположена между соединенными друг с другом кабельным соединителем 132 и ножевым соединителем 156. В соответствии с только что приведенным описанием кабельный соединитель 132 включает штыревой контакт 170, конфигурированный для проникновения через салфетку 174 при сопряжении двух упомянутых компонентов. Такое проникновение формирует малое отверстие или перфорацию 175 в стерильной салфетке, заполненное штыревым контактом 170, вследствие чего размер перфорации салфетки штыревым контактном минимален. При этом крепление межу кабельным соединителем 132 и ножевым соединителем 170 таково, что перфорация стерильной салфетки за счет проникновения штыревого контакта закрыта каналом 172 кабельного соединителя, что сохраняет стерильность салфетки и исключает ее разрыв, способный нарушить сформированное салфеткой стерильное поле. Канал 172 кабельного соединителя конфигурирован для подгиба стерильной салфетки 174 вниз перед проникновением через нее штыревого контакта 170, чтобы штыревой контакт не протыкал салфетку до тех пор, пока не будет находиться вблизи отверстия 162 ножевого соединителя 156. Следует отметить, что кабельный соединитель 132 и ножевой соединитель 156 конфигурированы для обеспечения взаимного выравнивания по оси вслепую, через непрозрачную стерильную салфетку 174, то есть на ощупь без визуального контроля врачом обоих компонентов.
[000101] Также следует отметить, что ножевые контакты 168 ножевого соединителя 156, как показано на фиг.15, конфигурированы для сопряжения с контактами 154 основания разъема так, чтобы помогать удерживать ножевой соединитель в сопряжении с каналом 152А основания разъема. Это, в свою очередь, устраняет необходимость вспомогательного устройства для крепления ножевого соединителя 156 к датчику 50 TLS.
[000102] Фиг.16 иллюстрирует пример графика 176 ЭКГ, включающего волну Р и комплекс QRS. В общем случае амплитуда волны Р изменяется в зависимости от расстояния между узлом датчика ЭКГ и синоатриальным узлом, формирующим колебательный сигнал 176. Врач может использовать это соотношение для определения момента, когда кончик катетера правильным образом расположен вблизи сердца. Например, в одной из реализации в соответствии с предшествующим описанием, кончик катетера требуется установить в нижней трети верхней полой вены. Данные ЭКГ, обнаруживаемые узлом датчика ЭКГ стилета 130, используют для воспроизведения графика, например, графика 176, для отображения на дисплее 30 системы 10 в режиме ЭКГ.
[000103] Далее, рассмотрим фиг.17 для описания аспектов отображения данных ЭКГ-сигнала на дисплее 30, когда система 10 находится в режиме ЭКГ, или третьем режиме, который был описан выше в соответствии с одним из вариантов осуществления настоящего изобретения. Снимок 178 экрана дисплея 30 включает элементы режима TLS, включающие изображение 120, представляющие датчик 50 TLS, и может также включать значок 114, соответствующий положению дистального кончика стилета 130 при его прохождении через сосудистую систему пациента. Снимок 178 экрана включает также окно 180, в котором отображена форма сигнала ЭКГ, захваченного узлом датчика ЭКГ стилета 130 и обработанного системой 10. Окно 180 постоянно обновляется при обнаружении новой формы сигнала.
[000104] Окно 182 включает последовательное отображение последних обнаруженных форм сигнала ЭКГ, а также включает панель 182А обновления, перемещающуюся в горизонтальном направлении для обновления форм сигнала при их обнаружении. Окно 184А используется для отображения исходной формы сигнала ЭКГ, захваченной до приближения узла датчика ЭКГ к синоатриальному узлу для сравнения, как помощь врачу при определении достижения требуемого положения кончика катетера. Окна 184В и 184С могут быть заполнены выбранными пользователем формами сигнала ЭКГ, когда пользователь нажимает заранее заданную клавишу на зонде 40 или клавишном интерфейсе 32 консоли. Графики сигналов в окнах 184В и 184С отображаются, пока они не будут перезаписаны новыми формами сигналов в результате выбора пользователя, осуществляемого нажатием клавиши или с помощью другого устройства ввода. Как и в описанных ранее режимах, на дисплее присутствуют шкала 124 глубины, индикаторы 126 состояния/действий, а также значки 128 клавиш. Также не дисплее 30 присутствует индикатор 186 целостности, который указывает, являются ли пары 158 выводов/электродов ЭКГ функционально связанными с датчиком 50 TLS.
[000105] Как можно понять из предыдущего описания, дисплей 30 в одном из вариантов осуществления настоящего изобретения отображает элементы и режима TLS, и режима ЭКГ одновременно на одном экране, предоставляя врачу обширные данные, помогающие при установке дистального кончика катетера в требуемое местоположение. Также, следует отметить, что в одном из вариантов осуществления настоящего изобретения распечатка со снимком экрана для выбранных данных ЭКГ или TLS может быть сохранена, распечатана или иным образом сохранена системой 10 для обеспечения возможности документации правильной установки катетера.
[000106] Несмотря на то, что описанные в настоящем документе варианты осуществления настоящего изобретения относятся к конкретной конфигурации катетера, например, PICC или CVC, эти варианты осуществления настоящего изобретения являются исключительно иллюстративными. В соответствии с этим, концепция настоящего изобретения может быть расширена и включает катетеры множества различных конфигураций и конструкций.
II. Ассистируемое наведение иглы/медицинского компонента
[000107] Варианты осуществления настоящего изобретения в общем направлены на обеспечение системы наведения для определения местоположения и наведения иглы или другого медицинского компонента во время процедур ультразвукового исследования или других подходящих процедур, например, для доступа с помощью иглы к подкожному сосуду пациента. В одном из вариантов осуществления настоящего изобретения система наведения обеспечивает наложение положения, ориентации и продвижения иглы в реальном времени поверх изображения ультразвуковой визуализации сосуда, что позволяет врачу точно направлять иглу к заданной цели. Также, в одном из вариантов осуществления настоящего изобретения система наведения отслеживает положение иглы в пяти степенях свободы: пространственное координатное пространство x, y, z, угол наклона и угол поворота иглы. Такое слежение позволяет наводить и устанавливать иглу с относительно высокой точностью.
[000108] Сначала обратимся к фиг.18 и 19, иллюстрирующим различные компоненты системы ультразвукового наведения иглы («системы»), в целом обозначенной как 1110 и конфигурированной в соответствии с одним из примеров осуществления настоящего изобретения. Как показано на чертеже, система 1110 в целом включает часть ультразвуковой визуализации ("US"), консоль 1120, дисплей 1130, и зонд 1140, при этом каждый из этих элементов подробно описан ниже.
[000109] Подсистему ультразвуковой визуализации системы 1110 применяют для формирования изображения целевой части внутри тела пациента перед чрескожным введением иглы или другого устройства доступа к цели. В соответствии с приведенным ниже описанием в одном из вариантов осуществления настоящего изобретения введение иглы выполняют перед последующим введением катетера в вену или другую часть сосудистой системы пациента. Тем не менее, следует понимать, что введение иглы в тело пациента может осуществляться для множества различных медицинских целей.
[000110] Фиг.19 иллюстрирует общую связь описанных выше компонентов с пациентом 1170 во время процедуры, конечной целью которой является установка катетера 1172 в сосудистую систему пациента через место 1173 введения в кожу. На фиг.19 видно, что катетер 1172 в целом включает проксимальную часть 1174, остающуюся снаружи тела пациента, и дистальную часть 1176, размещаемую внутри сосудистой системы пациента после окончания установки. Систему 1110 применяют, чтобы в конечном счете установить дистальный кончик 1176А катетера 1172 в требуемое положение внутри сосудистой системы пациента. В одном из вариантов осуществления настоящего изобретения требуемое положение дистального кончика 1176А катетера представляет собой положение вблизи сердца пациента, например, в нижней трети верхней полой вены (SVC). Очевидно, что система 1110 может применяться для установки дистального кончика катетера в других местоположениях.
[000111] Проксимальная часть 1174 катетера включает также коннектор 1174А, обеспечивающий гидравлическое сообщение между одним или более внутренними каналами катетера 1172 и одной или более удлинительными ножками 1174В, выходящими в проксимальном направлении из упомянутого разъема. Как отмечалось, установку иглы в сосудистой системе пациента в месте 1173 введения выполняют, как правило, перед введением катетера, однако следует понимать, что могут использоваться другие способы установки. Также, нужно понимать, что приведенное выше описание представляет собой лишь один из примеров применения системы 1110; действительно, она может применяться для множества различных назначений, таких как установка игл при подготовке к введению катетера в соответствии с предшествующим описанием, введение иглы для других назначений, или введение других медицинских компонентов в тело пациента, включая рентгеноконтрастные или ультразвуковые маркеры, биопсийные трубки, компоненты аблации, компоненты полостного сканирования, фильтры полой вены и т.п.
[000112] Более детально, консоль 1120 содержит множество компонентов системы 1110, при этом нужно понимать, что консоль может принимать множество различных форм. Процессор 1122, включающий энергонезависимую память, например, EEPROM, включен в состав консоли 1120 для управления функционированием системы и исполнения различных алгоритмов во время работы системы 1110, например, выступает в роли управляющего процессора. В состав консоли 1120 включен также цифровой контроллер/аналоговый интерфейс 1124, который осуществляет связь как с процессором 1122, так и с другими компонентами системы для обеспечения управления интерфейсом между зондом 1140 и другими компонентами системы.
[000113] Система 1110 включает также порты 1152 для соединения с дополнительными компонентами, например, опциональными компонентами 1154, включающими принтер, носители для хранения данных, клавиатуру и т.п. Упомянутые порты в одном из вариантов осуществления настоящего изобретения представляют собой порты USB, хотя и другие типы или комбинации типов портов могут использоваться для этого и других интерфейсных соединений, рассмотренных в настоящем описании. Разъем 1156 электропитания входит в состав консоли 1120 для обеспечения функционального соединения с внешним источником 1158 электропитания. Также может применяться внутренний аккумулятор 1160, либо вместе с внешним источником электропитания, либо в качестве его замены. В состав цифро-аналогового интерфейса 1124 консоли входят схемы 1159 управления электропитанием для регулирования потребления и распределения электропитания.
[000114] Дисплей 1130 в данном варианте осуществления настоящего изобретения интегрирован с консолью 1120 и используется для отображения информации врачу во время процедуры установки, например, изображения ультразвуковой визуализации целевой области внутри тела пациента, получаемой с помощью зонда 1140. В другом варианте осуществления настоящего изобретения дисплей может быть отдельным от консоли. В одном из вариантов осуществления настоящего изобретения клавишный интерфейс 1132 консоли и управляющие клавиши 1184 (фиг.19), входящие в состав зонда 1140, могут быть использованы врачом для немедленного вызова необходимого режима на дисплее 1130 как помощи в процедуре установки. В одном из вариантов осуществления настоящего изобретения дисплей 30 представляет собой устройство с LCD-экраном.
[000115] Фиг.19 более подробно иллюстрирует иглу 1200, используемую для получения начального доступа к сосудистой системе пациента через место 1173 введения. В соответствии с последующим более подробным описанием игла 1200 конфигурирована для совместной работы с системой 1110 и позволяет системе регистрировать положение, ориентацию и продвижение иглы во время процедуры установки с ультразвуковой визуализацией.
[000116] Фиг.20 иллюстрирует элементы зонда 1140 в соответствии с одним из вариантов осуществления настоящего изобретения. Зонд 1140 применяют в сочетании с ультразвуковой визуализацией сосуда, например, вены, при подготовке к введению иглы 1200 и/или катетера 1172 в кровеносную систему. Такая визуализация обеспечивает ультразвуковое наведение в реальном времени и помогает минимизировать осложнения, обычно связанные с подобным введением, включая непреднамеренное повреждение артерий, гематому, пневмоторакс и т.п.
[000117] Портативный зонд 1140 включает головку 1180, содержащую пьезоэлектрическую матрицу для формирования ультразвуковых импульсов и для приема эхо-сигнала от них после отражения телом пациента, когда головка прижата к коже пациента вблизи планируемого места 1173 введения (фиг.19). Зонд 1140 включает также множество управляющих клавиш 1184 (фиг.19) для управления системой, что устраняет необходимость выхода врача из стерильного поля, сформированного в окрестности места введения в тело пациента перед формированием места введения для обеспечения управления системой 1110.
[000118] В этой связи в одном из вариантов осуществления настоящего изобретения врач применяет подсистему ультразвуковой визуализации системы 1110 для определения подходящего места введения и установления доступа к сосудистой системе пациента, например, с помощью иглы 1200, перед введением катетера 1172, конечной целью чего является продвижение катетера через сосудистую систему пациента к заданному местоположению.
[000119] На фиг.18 показано, что зонд 1140 включает также контроллер 1142 клавиш и памяти для управления работой клавиш и зонда. Контроллер 1142 клавиш и памяти может включать энергонезависимую память, например, в одном из вариантов осуществления настоящего изобретения, EEPROM. Контроллер 1142 клавиш и памяти функционально связан с интерфейсом 1144 зонда консоли 1120, которая включает пьезокомпонент 1144А ввода/вывода для взаимодействия с пьезоэлектрической матрицей зонда, а также компонент 1144 В ввода/вывода клавиш и памяти для взаимодействия с контроллером 1142 клавиш и памяти.
[000120] Как показано на фиг.20, зонд 1140 включает массив 1190 датчиков для регистрации положения, ориентации и перемещения иглы 1200 во время процедур формирования ультразвуковых изображений, например, описанных выше. В соответствии с последующим более подробным описанием массив датчиков включает множество магнитных датчиков 1192, встроенных в корпус зонда. Датчики 1192 конфигурированы для обнаружения магнитного поля, связанного с иглой 1200, и позволяют системе 1110 отслеживать иглу. В данном варианте осуществления настоящего изобретения датчики конфигурированы как магнитные датчики, однако следует понимать, что датчики 1192 могут представлять собой датчики других типов и конфигураций в соответствии с последующим описанием. Также, они показаны на фиг.20 как входящие в состав зонда 1140, однако датчики 1192 массива 1190 датчиков могут входить в состав отдельных от зонда компонентов, например, отдельного портативного устройства. В данном варианте осуществления настоящего изобретения датчики 1192 расположены в линейной конфигурации под верхней лицевой поверхностью 1182 зонда 1140, однако нужно понимать, что датчики могут размещаться и в других конфигурациях, например, с изогнутой или полукруглой схемой размещения.
[000121] В данном варианте осуществления настоящего изобретения каждый из датчиков 1192 включает три ортогональных измерительных витка для обеспечения возможности обнаружения магнитного поля в трех пространственных измерениях. Такие трехмерные (3D) магнитные датчики могут быть приобретены, например, у компании Honeywell Sensing and Control, Морристаун, Нью-Джерси, США. При этом датчики 1192 в данном варианте осуществления настоящего изобретения конфигурированы как датчики Холла, хотя могут применяться и другие типы магнитных датчиков. Также, вместо трехмерных датчиков может применяться множество одномерных магнитных датчиков, при этом они могут быть размещены в соответствии с требуемой схемой, чтобы обеспечить возможность обнаружения в одном, двух или трех измерениях.
[000122] В данном варианте осуществления настоящего изобретения в массив 1190 датчиков входят пять датчиков 1192, обеспечивающих регистрацию иглы 1200 не только в трех пространственных измерениях (то есть координатном пространстве X, Y, Z), но также и ориентацию наклона и поворота самой иглы. Следует отметить, что в одном из вариантов осуществления настоящего изобретения ортогональные измерительные компоненты двух или более датчиков 1192 обеспечивают возможность определения положения наклона и поворота магнитного элемента 1210, и следовательно, иглы 1200.
[000123] В других вариантах осуществления настоящего изобретения в упомянутом массиве датчиков может применяться меньшее или большее количество датчиков. В общем случае нужно понимать, что количество, размер, тип и размещение датчиков в массиве датчиков может отличаться от явно проиллюстрированных в настоящем описании.
[000124] Фиг.21А и 21В более подробно иллюстрируют один из примеров иглы 1200, которая может использоваться в сочетании с системой 11100 наведения при доступе к целевой области внутри тела пациента в соответствии с одним из вариантов осуществления настоящего изобретения, как это проиллюстрировано на фиг.19. А именно, игла 1200 включает полую канюлю 1202, имеющую проксимальный конец 1202А и дистальный конец 1202В. Коннектор 1204 присоединен к проксимальному концу 1202А канюли 1202 и включает открытый конец 1204, конфигурированный в данном варианте осуществления настоящего изобретения как разъем для соединения с различными устройствами. Фактически, открытый конец 1204А коннектора 1204 связан с полой канюлей 1202, поэтому проволочный направитель, стилет или другой компонент могут проходить через коннектор в канюлю.
[000125] Как показано на фиг, 21А и 21В, в состав коннектора 1204 входит магнитный элемент 1210. На фиг.21В показано, что магнитный элемент 1210 в данном варианте осуществления настоящего изобретения представляет собой постоянный магнит, включающий, например, ферримагнитный материал, и имеющий кольцевую форму, задающую отверстие 1212, которое выровнено по оси с полой канюлей 1202. В этой конфигурации магнитный элемент 1210 формирует магнитное поле, обнаруживаемое массивом 1190 датчиков ультразвукового зонда 1140 для обеспечения возможности отслеживания системой 1110 местоположения, ориентации и перемещения иглы 1200 в соответствии с последующим более подробным описанием.
[000126] Нужно понимать, что в других вариантах осуществления настоящего изобретения в комбинации с иглой 1200 или другим медицинским компонентом для их отслеживания системой наведения, предложенной в настоящем изобретении, могут применяться множество магнитных элементов других типов или размеров, а также отличающееся их количество.
[000127] Далее, обратимся к фиг.22А и 22В, на которых проиллюстрирован ультразвуковой зонд 1140 системы 1110 и игла 1200 в исходном положении, готовая к введению через поверхность 1220 кожи пациента для доступа к целевой части внутри тела пациента. А именно, на иллюстрации головка 1180 зонда 1140 прижата к коже пациента и формирует ультразвуковой луч 1222 для обеспечения ультразвуковой визуализации части сосуда 1226 под поверхностью 1220 кожи пациента. Изображение ультразвуковой визуализации сосуда 1226 может отображаться на дисплее 1130 системы 1110 (фиг.19).
[000128] Как отмечалось выше, система 1110 в данном варианте осуществления настоящего изобретения конфигурирована для регистрации положения, ориентации и перемещения иглы 1200, описанной выше. А именно, массив 1190 датчиков зонда 1140 конфигурирован для обнаружения магнитного поля магнитного элемента иглы 1200. Каждый из датчиков 1192 массива 1190 датчиков конфигурирован для пространственного обнаружения положения магнитного элемента 1210 в трехмерном пространстве. Соответственно, во время работы системы 1110 данные об уровне напряженности магнитного поля магнитного элемента 1210, обнаруживаемого каждым из датчиков 1192, передаются в процессор, например, процессор 1122 консоли 1120 (фиг.18), который в реальном времени вычисляет положение и/или ориентацию магнитного элемента 1210.
[000129] В частности, как показано на фиг.22А и 22В, положение магнитного элемента 1210 в координатном пространстве X, Y и Z относительно массива 1190 датчиков может определяться системой 1110 с помощью данных об уровне напряженности магнитного поля, обнаруживаемого датчиками 1192. При этом на фиг.22А показано, что может также быть определен наклон магнитного элемента, тогда как на фиг.22В показано, что может быть определен поворот магнитного элемента. Вычисления, необходимые для подобного определения положения/ориентации, могут обеспечиваться соответствующими схемами зонда 1140, консоли 1120 или другого компонента системы. В одном из вариантов осуществления настоящего изобретения магнитный элемент 1210 может отслеживаться с использованием концепций одного или более следующих патентов США: №5,775,322; №5,879,297; №6,129,668; №6,216,028; и №6,263,230. Содержимое упомянутых выше патентов США полностью включено в настоящее описание путем ссылки.
[000130] Упомянутая выше информация о положении и ориентации, определяемая системой 1110, вместе с длиной канюли 1202 и положением магнитного элемента 1210 относительно дистального кончика иглы, известных или вводимых в систему, позволяет системе точно определять местоположение и ориентацию всей длины иглы 1200 относительно массива 1190 датчиков. Опционально, расстояние между магнитным элементом 1210 и дистальным кончиком иглы известно или вводится в систему 1110. Это, в свою очередь, позволяет системе 1110 накладывать изображение иглы 1200 на изображение, формируемое ультразвуковым лучом 1222 зонда 1140. На фиг.23А и 23В проиллюстрированы пример подобного наложения изображения иглы на изображение ультразвуковой визуализации. А именно, и на фиг.23А, и на фиг.23В показан снимок 1230 экрана, который может отображаться, например, на дисплее 1130 (фиг.19). На фиг.23А показано изображение 1232 ультразвуковой визуализации, включающее представление поверхности 1220 кожи пациента и подкожного сосуда 1226. Изображение 1232 ультразвуковой визуализации соответствует изображению, полученному с помощью ультразвукового луча 1222, например, проиллюстрированного на фиг.22А и 22В.
[000131] Также, на снимке 1230 экрана показано изображение 1234 иглы, представляющее положение и ориентацию реальной иглы 1200, определенные системой 1110 в соответствии с предшествующим описанием. Поскольку система способна определять местоположение и ориентацию иглы относительно массива датчиков 1190, система может точно определять положение и ориентацию иглы 1200 относительно изображения 1232 ультразвуковой визуализации и накладывать изображение иглы на него с целью отображения изображения 1234 иглы на дисплее ИЗО. Координация положения изображения 1234 иглы на изображении 1232 ультразвуковой визуализации выполняется с помощью соответствующих алгоритмов, исполняемых процессором 1122 или другим подходящим компонентом системы 1110.
[000132] Датчики 1192 конфигурированы для непрерывного обнаружения магнитного поля магнитного элемента иглы 1200 во время работы системы 1110. Это позволяет системе 1110 непрерывно обновлять положение и ориентацию изображения 1234 иглы для отображения на дисплее 1130. Следовательно, продвижение или иные перемещения иглы 1200 отображаются в реальном времени посредством изображения 1234 иглы на дисплее 1130. Следует отметить, что система 1110 способна непрерывно обновлять как изображение ультразвуковой визуализации 1232, так и изображение 1234 иглы на дисплее 1130, когда происходят перемещения зонда 1140 и иглы 1200 во время процедуры установки или при других операциях.
[000133] На фиг.23А показано также, что в одном из вариантов осуществления настоящего изобретения система 1110 может отображать проекцию 1236 траектории на основе текущего положения и ориентации иглы 1200, что показано с помощью изображения 1234 иглы. Проекция 1235 траектории помогает врачу определить, позволит ли текущая ориентация иглы 1200, отображаемая изображением 1234 иглы на дисплее 1130, попасть в требуемую цель внутри тела пациента, например, проиллюстрированный в одном из вариантов осуществления настоящего изобретения сосуд 1226. С изменением ориентации и/или положения изображения 1234 иглы, проекция 1236 траектории модифицируется системой 1110 соответствующим образом. На дисплее 1130 системы 1110 может также отображаться цель 1238, указывающая на точку, где проекция 1236 траектории пересекает плоскость изображения ультразвуковой визуализации. Как показано на фиг.23А, в данном примере цель 1238 расположена внутри сосуда 1226, показанного на изображении 1232 ультразвуковой визуализации. Следует отметить, что положение цели 1238 на дисплее 1130 также может изменяться при изменении положения иглы 1200 и/или изображения ультразвуковой визуализации 1232. Снимок 1230 экрана включает также область 1239 неопределенности, показанную в данном примере в виде прямоугольника, указывающего на возможные пределы погрешности в системе, связанной с длиной иглы, жесткостью и изгибом иглы, уровнем напряженности поля магнитного элемента, магнитной интерференцией, возможным расхождением магнитной оси магнитного элемента с продольной осью иглы, ориентацией массива датчиков относительно плоскости формирования изображения ультразвуковой визуализации и т.п.
[000134] На фиг.23В можно увидеть, что в одном из вариантов осуществления настоящего изобретения снимок 1230 экрана может быть конфигурирован так, что ориентация изображения ультразвуковой визуализации 1232 и изображения 1234 иглы обеспечивает их отображение в трехмерном ракурсе. Это позволяет контролировать угол и ориентацию иглы 1200, отображаемые изображением 1234 иглы, и сравнивать их с заданной целью, показанной на ультразвуковом изображении 1232. Следует отметить, что снимки 1230 экрана представляют собой лишь примеры возможных изображений, формируемых системой 1110 для отображения; на практике могут применяться и другие визуальные представления. Также следует отметить, что конкретная область тела, изображение которой формируют, показана исключительно в качестве примера; система может применяться для формирования изображения ультразвуковой визуализации множества различных частей тела и не должна быть ограничена явно проиллюстрированным на приложенных чертежах. Также, система, проиллюстрированная и описанная в настоящем документе, может при необходимости входить в состав более крупной системы, или может быть конфигурирована как отдельно стоящее устройство. Также, нужно понимать, что помимо визуального дисплея 1130 в системе 1110 для помощи врачу во время позиционирования и введения иглы в тело пациента может использоваться звуковая информация, например, гудки, звуковые тоны и т.п.
[000135] Как отмечалось выше, в одном из вариантов осуществления настоящего изобретения системе 1110 необходимо знать общую длины иглы 1200 и местоположение магнитного элемента 1210 на ней для обеспечения возможности точного отображения изображения 1234 иглы и других элементов снимка 1230 экрана, показанных на фиг.23А и 23В. Система 1110 может получать информацию об этих и/или других релевантных параметрах различными путями, включая сканирование системой штрих-кода, входящего в состав иглы или используемого в комбинации с ней, включение в состав иглы микросхемы радиочастотной идентификации ("RFID") для сканирования системой, цветовое кодирование иглы, ручной ввод параметров в систему врачом и т.п.Например, микросхема 1354 RFID, входящая в состав иглы 1200, проиллюстрирована на фиг.33А. Зонд 1140 или другой компонент системы 1110 может включать считыватель меток RFID для считывания информации с микросхемы 1345 RFID, например, о типе или длине иглы 1200 и т.п. Эти и другие средства ввода параметров иглы в систему 1110 или обнаружения таких параметров, соответственно, не выходят за рамки настоящего изобретения.
[000136] В одном из вариантов осуществления настоящего изобретения длина иглы (или другой аспект медицинского компонента) может быть определена при помощи измерения зондом/системой характеристики упомянутого магнитного элемента, например, уровня напряженности поля. К примеру, в одном из вариантов осуществления настоящего изобретения магнитный элемент иглы может быть размещен на заранее заданном расстоянии от зонда или в заранее заданном местоположении относительно зонда. При расположении магнитного элемента таким образом массив датчиков зонда обнаруживает и измеряет уровень напряженности поля магнитного элемента. Система может сравнивать измеренную напряженность поля с хранимым списком возможных напряженностей поля, соответствующих различным длинам игл. Система может сопоставлять эти две напряженности и определять длину иглы. За этим может следовать определение местоположения иглы и последующее введение иглы в соответствии с настоящим описанием. В другом варианте осуществления настоящего изобретения вместо удерживания магнитного элемента неподвижным в заранее заданном положении, магнитный элемент может перемещаться вблизи зонда, причем зондом захватываются несколько показаний напряженности поля. Аспекты, которые могут быть изменены с целью обеспечения различных уровней напряженности множества магнитных элементов, включают размер, форму и состав магнитного элемента и т.п.
[000137] Далее описано более подробно применение системы 1110 для наведения иглы или другого медицинского устройства в связи с получением изображений ультразвуковой визуализации целевой области внутри тела пациента («цели») в одном из вариантов осуществления настоящего изобретения. В комбинации с иглой 1200, оснащенной магнитным элементом и расположенной на подходящем расстоянии (например, два или более фута (60,96 см)) от ультразвукового зонда 1140, имеющего в своем составе массив 1190 датчиков, зонд применяют для формирования изображения ультразвуковой визуализации (для отображения его на дисплее 1130 системы) цели в теле пациента, которую игла должна пересечь при чрескожном введении. После этого запускается калибровка системы 1110, при которой процессором 1122 консоли 112 исполняются алгоритмы, предназначенные для определения исходного значения всех магнитных полей в окружающей среде в области выполнения процедуры. Также, система 1110 получает информацию об общей длины иглы 1200 и/или положении магнитного элемента относительно дистального кончика иглы, например, при помощи пользовательского ввода, автоматического распознавания или любого другого подходящего способа в соответствии с предшествующим описанием.
[000138] Затем иглу 1200 вводят в область действия датчиков 1192 массива 1190 датчиков зонда 1140. Каждый из датчиков 1192 регистрирует напряженность магнитного поля, связанную с магнитным элементом 1210 иглы 1200, и эти данные передают в процессор 1122. В одном из вариантов осуществления настоящего изобретения эти данные могут храниться в памяти до тех пор, пока они не понадобятся процессору. При обнаружении 1192 магнитного поля процессором 1122 исполняются соответствующие алгоритмы для вычисления напряженности магнитного поля магнитного элемента 1210 в прогнозируемых точках пространства относительно зонда. Затем процессор 1122 сравнивает фактические данные о напряженности магнитного поля, обнаруживаемого датчиками 1192, с вычисленными значениями напряженности поля. Следует заметить, что эта процедура более подробно описана в указанных выше патентах США. Данная процедура может выполняться итеративно до тех пор, пока вычисленное значение для прогнозируемой точки не будет совпадать с измеренными данными. Когда совпадение достигнуто, положение магнитного элемента 1210 в трехмерном пространстве определено. С помощью данных о напряженности магнитного поля, обнаруживаемого датчиками 1192, может быть также определен наклон и поворот (то есть ориентация) магнитного элемента 1210. Вместе с известной длиной иглы 1200 и положением дистального кончика иглы относительно магнитного элемента, это позволяет обеспечить точное представление положения и ориентации иглы системой 1110 и отобразить его в виде виртуальной модели, то есть изображения 1234 иглы на дисплее 1130. Следует отметить, что для обеспечения отображения иглы в одном из вариантов осуществления настоящего изобретения в системе 1110 упомянутые прогнозируемые и фактически обнаруживаемые значения должны совпадать с заранее заданным допуском или уровнем достоверности.
[000139] Отображение виртуального изображения 1234 иглы 1200 в соответствии с предшествующим описанием выполняется в данном варианте осуществления настоящего изобретения путем наложения изображения иглы на изображение 1232 ультразвуковой визуализации на дисплее 1130 (фиг.23А, 23В). Соответствующие алгоритмы системы 1110, исполняемые процессором 1122 или другим подходящим компонентом, позволяют при этом определять проекцию 1236 траектории, цель 1238 и область 1239 неопределенности (фиг.23А, 23В), и отображать их на дисплее 1130 поверх изображения 1232 ультразвуковой визуализации цели. Упомянутые процедуры прогнозирования, регистрации, сравнения и отображения для непрерывного отслеживания перемещения иглы 1200 в реальном времени выполняют итеративно.
[000140] В свете предшествующего описания и на примере фиг.24 можно видеть, что в одном из вариантов осуществления настоящего изобретения способ 1240 наведения иглы или другого медицинского компонента включает различные шаги. На шаге 1242 формируют изображение целевой области внутри тела пациента с помощью системы формирования изображений, например, устройства формирования ультразвуковых изображений.
[000141] На шаге 1244 измеряют обнаружимую характеристику медицинского компонента, например, иглы, с помощью одного или более датчиков системы формирования изображений. В данном варианте осуществления настоящего изобретения упомянутой обнаружимой характеристикой иглы является магнитное поле магнитного элемента 1210, входящего в состав иглы 1200, а упомянутые датчики представляют собой магнитные датчики, входящие в состав массива 1190 датчиков ультразвукового зонда 1140.
[000142] На шаге 1246 определяют положение медицинского компонента относительно упомянутой целевой области внутри тела пациента по меньшей мере в двух пространственных измерениях при помощи измерения упомянутой обнаружимой характеристики. В соответствии с предшествующим описанием упомянутое определение выполняется в данном варианте осуществления настоящего изобретения процессором 1122 консоли 1120.
[000143] На шаге 1248 комбинируют изображение, отражающее положение медицинского компонента, с изображением упомянутой целевой области внутри тела пациента для его отображения на дисплее. Шаг 1250 иллюстрирует, что шаги 1244-1248 могут итеративно повторяться для обеспечения отображения продвижения или иного перемещения медицинского компонента относительно отображаемой цели, например, чрескожного введения иглы 1200 в сосуд 1226 (фиг.23А, 23В).
[000144] Нужно понимать, что процессор 1122 или другой подходящий компонент может вычислять для отображения на дисплее 1130 и другие аспекты, включая область 1239 неопределенности и цель 1238 (фиг.23А, 23В).
[000145] Нужно понимать, что в одном из вариантов осуществления настоящего изобретения массив датчиков не обязательно должен быть исходно встроен в устройство ультразвуковой визуализации и может включаться в его состав иным способом. На фиг.25 показан один из примеров такого способа, в котором присоединяемый измерительный модуль 1260, включающий датчики 1192 массива 1190 датчиков, проиллюстрирован в сопряжении с ультразвуковым зондом 1140. Подобная конфигурация обеспечивает возможность наведения иглы в соответствии с настоящим описанием в комбинации с применением стандартного устройства ультразвуковой визуализации, то есть устройства, не включающего массив датчиков, встроенный в ультразвуковой зонд и процессор, а также алгоритмы, конфигурированные для обнаружения местоположения и отслеживания иглы в соответствии с предшествующим описанием. В этой связи измерительный модуль 1260 в одном из вариантов осуществления настоящего изобретения включает процессор и алгоритмы, подходящие для определения местоположения и отслеживания иглы или другого медицинского компонента, а также для отображения на дисплее виртуального изображения иглы с наложением на изображение ультразвуковой визуализации. В одном из вариантов осуществления настоящего изобретения для обеспечения отображения, связанного с отслеживанием иглы, измерительный модуль 1260 может входить в состав модульного дисплея 1262. Соответственно, эти и другие конфигурации системы наведения не выходят за рамки объема настоящего изобретения.
[000146] Фиг.26 иллюстрирует, что в одном из вариантов осуществления настоящего изобретения для удерживания и продвижения иглы 1200 во время процедур ультразвуковой визуализации и наведения иглы, выполняемых системой 1110 в соответствии с предшествующим описанием может применяться держатель иглы. В соответствии с иллюстрацией держатель 1270 иглы имеет форму пистолета и включает курок 1272 для управляемого продвижения иглы 1200 или другого подходящего медицинского компонента путем продольного перемещения иглы в сторону от барабана держателя при нажатии на курок. Такая конфигурация держателя 1270 иглы обеспечивает простоту обращения с иглой врачом с помощью только одной руки, тогда как другая его рука удерживает и управляет ультразвуковым зондом 1140. При этом держатель 1270 иглы может способствовать перемещению/вращению иглы, например, с помощью двигателя, привода прерывистого движения, гидравлических/пневматических приводов и т.п. Кроме того, в состав держателя 1270 может быть включена функциональность хронометрирования для помощи при определении местоположения дистального кончика иглы 1200, а также для обеспечения вращения иглы.
[000147] В одном из вариантов осуществления настоящего изобретения держатель 1270 иглы может быть функционально связан с системой 1110 таким образом, чтобы продвижение держателя иглы автоматически останавливалось при достижении дистальным концом 1202 В канюли 1202 иглы целевой области внутри тела пациента или при пересечении иглой плоскости ультразвуковой визуализации. В еще одном варианте осуществления настоящего изобретения вместо иглы в состав держателя иглы может входить магнитный элемент. Соответственно, когда игла временно установлена в держатель иглы, система наведения может осуществлять определение ее местоположения и наведение без необходимости установки магнитного элемента непосредственно на игле.
[000148] Фиг.27 и 28 иллюстрируют компоненты системы 1110 наведения в соответствии с другим вариантом осуществления настоящего изобретения, в котором для обеспечения возможности отслеживания и наведения иглы применяют оптическое взаимодействие между зондом 1140 и иглой 1200. А именно, зонд 1140 включает оптический/световой источник, например, светодиод 1280 и фотодетектор 1282, расположенный на поверхности зонда. Нужно понимать, что источник и детектор света могут быть конфигурированы для формирования и обнаружения световых сигналов во множестве различных диапазонов, включая видимый, инфракрасный и т.п.
[000149] Коннектор 1204 иглы включает отражающую поверхность 1286, способную отражать свет, формируемый светодиодом 1280 и падающий на нее. Как показано на фиг.28, излучаемый светодиодом 1280 свет отражается отражающей поверхностью 1286 иглы 1200, при этом его часть принимается и обнаруживается фотодетектором 1282. Как и в предыдущих вариантах осуществления настоящего изобретения процессор 1122 системной консоли 1120 может применяться для приема измеренных данных от фотодетектора 1282 и для вычисления положения и/или ориентации иглы 1200. Как и ранее, длина иглы 1200 и/или положение отражающей поверхности относительно дистального конца иглы 1200 вводится или иным образом обнаруживается или сообщается в систему 1110. Следует отметить, что отражающая поверхность может входить в состав и других частей иглы.
[000150] В свете предшествующего описания очевидно, что в данном варианте осуществления настоящего изобретения упомянутая обнаружимая характеристика иглы 1200 включает коэффициент отражения отражающей поверхности 1286, в отличие от характеристики магнитного поля магнитного элемента 1210 в предыдущих вариантах осуществления настоящего изобретения, а упомянутый датчик включает фотодетектор 1282 вместо магнитных датчиков 1192 в предыдущих вариантах осуществления настоящего изобретения. Следует отметить, что в одном из вариантов осуществления настоящего изобретения описанная выше конфигурация может быть обращена, то есть оптический источник может входить в состав иглы или медицинского компонента. В этом случае свет излучается от иглы и обнаруживается фотодетектором 1282, входящим в состав зонда 1140, для обеспечения определения местоположения и отслеживания иглы. В состав иглы может входить источник электропитания, например, часовая батарейка и т.п., для обеспечения энергоснабжения светового источника иглы.
[000151] Нужно понимать, что в более общем случае для отслеживания и наведения к цели в теле пациента игла или медицинский компонент могут включать одну или более упомянутых или других обнаружимых характеристик. Примеры других форм обнаружимых характеристик, не ограничивающие настоящее изобретение, включают электромагнитные или радиочастотные (RF) характеристики (см., например, фиг.29-30 ниже), а также радиоактивность. Относительно радиочастотных вариантов нужно понимать, что в состав иглы для обеспечения возможности обнаружения соответствующим датчиком (или датчиками) может входить один или более синхронных или асинхронных импульсных источников сигнала. В качестве варианта, первый источник радиочастотного сигнала может быть связан с пассивным магнитом, формирующим второй источник сигнала.
[000152] Фиг.29 и 30 иллюстрируют компоненты системы наведения в соответствии с одним из вариантов осуществления настоящего изобретения, в котором для обеспечения возможности отслеживания и наведения иглы применяют взаимодействие электромагнитных сигналов между зондом 1140 и иглой 1200. А именно, на фиг.29 игла 1200 включает размещенный в ней стилет 1298. Стилет 1298 включает электромагнитный виток 1290, который функционально связан с зондом 1140 через кабель 1292. Таким образом электромагнитный виток 1290 может возбуждаться соответствующими компонентами, входящими в состав зонда 1140 или системной консоли 1120, чтобы электромагнитный виток излучал электромагнитный сигнал во время работы системы.
[000153] В состав зонда 1140 входит датчик 1294, подходящий для обнаружения электромагнитных сигналов, излучаемых электромагнитным витком 1290 стилета 1293. В данном варианте осуществления настоящего изобретения датчик 1294 представляет собой трехосный датчик для регистрации соответствующих ортогональных составляющих электромагнитного сигнала, хотя могут также применяться и другие конфигурации витка или датчика. Такая конфигурация позволяет определять положение и ориентацию иглы 1200 за счет триангуляции электромагнитного сигнала или другой подходящей процедуры, и отображать их аналогично уже описанному выше способу. Как и в предыдущих вариантах осуществления настоящего изобретения процессор 1122 системной консоли 1120 (фиг.18) может применяться для приема данных, обнаруживаемых электромагнитным датчиком 1294, и для вычисления положения и/или ориентации иглы 1200. Как и раньше, длину иглы 1200 и/или положение электромагнитного витка 1290 относительно дистального конца иглы 1200 вводят или иным образом регистрируют, или сообщают в систему.
[000154] Фиг.30 иллюстрирует другой вариант конфигурации электромагнитных компонентов фиг.29, в котором их взаимное расположение является обращенным: электромагнитный виток 1290 входит в состав зонда 1140, а электромагнитный датчик 1294 входит в состав стилета 1298, размещенного в игле 1200. Нужно отметить, что в вариантах осуществления настоящего изобретения, проиллюстрированных на фиг.29 и 30, функциональная связь между электромагнитным витком 1290 и электромагнитным датчиком 1294 через кабель 1292 позволяет компоненту, размещенному в стилете 1298, быть возбуждаемым системой 1110. Это также обеспечивает возможность соотнесения конкретной электромагнитной частоты (или частот), излучаемых электромагнитным витком 1290 и обнаруживаемых электромагнитным датчиком 1294. В одном из вариантов осуществления настоящего изобретения, проиллюстрированная на фиг.29, конфигурация может быть изменена, при этом кабель, функционально связывающий электромагнитный виток и электромагнитный датчик, отсутствует; вместо этого электромагнитный виток стилета функционирует как независимый от зонда компонент и питается от независимого источника энергии, например, аккумулятора. В этом случае зонд/система включает соответствующие компоненты обработки сигнала, конфигурированные для обнаружения электромагнитного сигнала, излучаемого электромагнитным витком, и для их обработки, необходимой для определения местоположения иглы.
[000155] Следует отметить, что электромагнитный виток и электромагнитные датчики могут быть установлены в местоположениях, которые отличаются от проиллюстрированных. Например, электромагнитный виток может входить непосредственно в состав иглы или в состав соединителя, крепящегося на дистальном конце иглы.
[000156] Фиг.31А-31В более подробно иллюстрируют иглу 1200, конфигурированную в соответствии с одним из вариантов осуществления настоящего изобретения, где игла включает коннектор 1304, из которого выходит канюля 1202. Магнитный элемент 1310, образующий отверстие 1312, расположен в углублении 1314А корпуса 1314. Корпус 1310 включает резьбу, обеспечивающую резьбовое соединение коннектора 1304 иглы или других соответствующих компонентов иглы, или медицинского компонента. Таким образом, магнитный элемент 1310 с возможностью съема крепится к игле 1200 при помощи корпуса 1314. То есть, магнитный элемент 1310 не обязательно должен быть постоянно закреплен на игле 1200 или входить в ее состав, вместо этого он может быть снят, когда наведение иглы на основе магнитного взаимодействия больше не требуется. Также, это позволяет крепить магнитный элемент на иглы множества различных типов и размеров. Следует отметить, что в данном варианте осуществления настоящего изобретения игла 1200 включает также сдвигаемый в дистальном направлении защитный компонент 1320 иглы для изолирования, для обеспечения безопасности, дистального кончика иглы после извлечения иглы из тела пациента. Также следует отметить, что в дополнение к явно проиллюстрированным и описанным в настоящем документе могут применяться дополнительные или другие съемные магнитные элементы.
[000157] На фиг.32-33В приведены дополнительные примеры иглы 1200, включающей магнитный элемент. На фиг.32 два стержнеобразных магнитных элемента 1340 размещены как ортогонально выходящие из коннектора 1334 иглы 1200, иллюстрируя, что магнитный элемент не обязательно должен быть ориентирован параллельно продольной оси иглы. На фиг.33А-33B в состав коннектора 1344 иглы входят четыре магнитных элемента 1350, показывая, что в состав иглы может входить более одного магнитного элемента. Подобная конфигурация может применяться, например, когда пространство ограничено и не позволяет использовать только один магнитный элемент. Нужно отметить, что количество, форма и размещение магнитных элементов в данном варианте осуществления настоящего изобретения представляет собой лишь один из примеров из множества возможных конфигураций.
[000158] Фиг.34A-34G дают различные примеры конфигурации магнитного элемента 1360, образующего отверстие для приема через него канюли иглы. Проиллюстрированы конфигурации с различной формой магнитного элемента 1360, включая квадратную (фиг.34А), шестиугольную (фиг.34В), треугольную (фиг.34С), прямоугольную (фиг.34D), овальную (фиг.34Е), восьмиугольную (фиг.34В), и четырехгранную пирамидальную (фиг.34G). Магнитные элементы, показанные на приложенных чертежах, представляют собой всего лишь примеры из большого количества геометрических и других форм, допускающих применение для формирования магнитного элемента; то есть, в рамки настоящего изобретения попадают и другие формы, явно не проиллюстрированные в настоящем документе.
[000159] Фиг.35-37 иллюстрируют различные детали, связанные с системой измерения длины компонента для использования вместе с системой наведения, рассмотренной в настоящем описании. В соответствии с предшествующим описанием упомянутую систему наведения применяют для определения местоположения и для наведения иглы или другого медицинского компонента во время процедур ультразвуковой визуализации или других соответствующих процедур, например, для доступа при помощи иглы к подкожному сосуду пациента. В одном из вариантов осуществления настоящего изобретения система наведения позволяет накладывать в реальном времени положение, ориентацию и продвижение иглы поверх изображения ультразвуковой визуализации сосуда, что позволяет врачу точно наводить иглу на заданную цель. Также, в одном из вариантов осуществления настоящего изобретения система наведения отслеживает положение иглы в пяти степенях свободы: координатное пространство x, y и z, наклон иглы и поворот иглы. Такое отслеживание позволяет наводить и устанавливать иглу со сравнительно высокой точностью. Различные детали системы наведения 1110 были описаны выше на примере фиг.18, 19 и др.
[000160] В соответствии с предшествующим описанием, информация о положении и ориентации, определенная системой 1110, вместе с длиной иглы 1200 и положением магнитного элемента 1210 относительно дистального кончика 1202 канюли 1202 иглы известны или введены в систему, что позволяет системе точно определять местоположение и ориентацию всей длины иглы 1200 относительно массива 1190 датчика. В соответствии с данными вариантами осуществления настоящего изобретения длина иглы может быть быстро и без затруднений определена с помощью системы определения длины иглы в соответствии с настоящим изобретением, описанной ниже, что позволяет обеспечить точное отслеживание иглы системой наведения.
[000161] В свете предшествующего описания в настоящем документе описана система 1500 определения длины иглы для определения длины иглы 1200. В частности, компоненты системы 1500 проиллюстрированы на фиг.35, где показаны также многие из компонентов системы 1110 наведения, например, зонд 1140, его массив 1190 датчиков, игла 1200 и магнитный элемент.
[000162] Более детально, в состав системы входит приспособление 1510 для крепления иглы, показанное как присоединенное к зонду 1140 вблизи его головки 1180. Приспособление 1510 для крепления иглы включает канал или другое подходящее отверстие, конфигурированное для приема, с возможностью снятия, дистальной части иглы 1200 таким образом, чтобы ее канюля 1202 образовывала заранее заданный угол 9 с плоскостью, в которой лежит массив 1190 датчиков, как показано на фиг.35. В данном варианте осуществления настоящего изобретения массив 1190 датчиков 1192 расположен на измерительной плате 1522, следовательно, измерительная плата может рассматриваться как плоскость, определяющая плоскость датчиков.
[000163] Фиг.36А-36С иллюстрируют различные детали приспособления 1510 для крепления иглы в соответствии с одним из вариантов осуществления настоящего изобретения, в котором данное приспособление включает узел 1516 направления иглы. В соответствии с иллюстрацией приспособление 1510 для крепления иглы реализовано в виде канала 1512, включающего открытый проксимальный конец 1512, через который принимается канюля 1202 иглы и закрытый дистальный конец 1512 В. Канал 1512 размещен на верхней поверхности узла 1516 направления иглы, который в свою очередь включает направляющий канал 1518. Фиг.37 иллюстрирует дистальную часть канюли 1202 иглы, вставленную в канал 1512 таким образом, что дистальный конец 1202 В канюли расположены вблизи закрытого дистального конца 1512 В канала. Игла 1200 фиг.35 аналогичным образом расположена в канале 1512, что позволяет системе 1500 определять длину иглы 1200 в соответствии с последующим более подробным описанием.
[000164] Следует отметить, что конкретный размер, форма и конструкция узла направления иглы, а также приспособления для крепления иглы могут отличаться от проиллюстрированных и описанных в настоящем описании. Также, может отличаться местоположение приспособления для крепления иглы на зонде, как и положение датчиков и/или измерительной платы. В дополнение следует отметить, что с помощью системы определения длины иглы может также устанавливаться длина других медицинских компонентов. В таких случаях в ультразвуковом зонде будет применяться соответствующим образом сконструированное приспособление крепления.
[000165] Размещение дистальной части канюли 1202 иглы в канале 1512 приспособления 1510 для крепления иглы, как показано на фиг.35, задает положение иглы 1200 с заранее заданным углом 9 относительно плоскости датчиков 1192, при этом данная плоскость по существу соответствует измерительной плате 1522, а также обеспечивает нахождение дистального кончика 1202 В канюли в положении, известном системе 1500 определения длины иглы, то есть по существу вблизи вершины угла 9.
[000166] Когда игла 1200 расположена как показано на фиг.35, можно видеть, что прямоугольный треугольник задает координатное пространство x-y-z между иглой и плоскостью, образованной измерительной платой 1522, на которой размещены датчики 1192 массива 1190 датчиков. Также будет показано, что измерительная плата, соответственно, рассматривается системой 1500 как опорная плоскость при определении длины иглы.
[000167] Упомянутый выше треугольник имеет сторону x, задающую ортогональное расстояние между плоскостью датчиков измерительной платы 1522 и магнитным элементом 1210 иглы 1200, при этом сторона y задает расстояние между точкой пересечения стороны x с плоскостью датчиков и вершиной угла θ, а сторона l по существу соответствует длине иглы 1200. Следует отметить, что в данном варианте осуществления настоящего изобретения сторона l не полностью доходит до вершины угла θ из-за смещения между плоскостью датчиков и дистальным кончиком 1202 канюли 1202 иглы, расположенной в канале 1512 приспособления для крепления иглы. В этой связи система 1500 определения длины иглы в одном из вариантов осуществления настоящего изобретения конфигурирована для учета этого смещения при вычислении длины иглы, как это можно видеть в приведенных ниже уравнениях. Угол θ образован сторонами l и y, при этом прямой угол ϕ образован сторонами x и y. Следовательно, сторона l является гипотенузой прямоугольного треугольника.
[000168] Следует отметить, что сторона y описанного выше воображаемого треугольника соответствует в данном варианте осуществления настоящего изобретения упомянутой выше опорной плоскости, которая в данном варианте осуществления настоящего изобретения лежит в одной плоскости с измерительной платой 1522. Следует также отметить, что опорная плоскость, а, следовательно, и сторона y воображаемого треугольника, проиллюстрированного на фиг.35, может задаваться системой 1500 так, чтобы располагаться в отличающихся от проиллюстрированных в настоящем документе местоположениях. Также, в одном из вариантов осуществления настоящего изобретения ориентация треугольника в координатном пространстве x-y-z может выбираться пользователем, системой определения длины иглы и/или системой наведения и отличаться от проиллюстрированной и описанной в данном документе.
[000169] Как отмечалось, можно видеть, что положение дистального конца 1202 В канюли 1202 иглы и угол θ известны в системе 1500, когда игла 1200 расположена в канале 1512 приспособления для крепления иглы, как показано на фиг.34. В одном из вариантов осуществления настоящего изобретения дистальный конец 1202 В и угол θ являются неизменными и заданы фиксированной конструкцией приспособления 1510. В другом варианте осуществления настоящего изобретения упомянутое приспособление допускает регулировку с одним или более положениями: в этом случае, например, система может информироваться о положении упомянутого приспособления для определения угла θ.
[000170] Система 1110 наведения иглы в соответствии с предшествующим описанием способна обнаруживать положение магнитного элемента 1210 иглы 1200 в координатном пространстве x-y-z, как это подробно описано выше. В этой связи система 1110 может непосредственно определять значения длины сторон x и y упомянутого треугольника. Следует отметить, что определение длины стороны y обеспечивается за счет известного положения дистального конца 1202 В канюли 1202 иглы в канале 1512 приспособления для крепления иглы. При этом угол θ известен за счет установки иглы 1200 в канал 1512 приспособления для крепления иглы в соответствии с предшествующим описанием. Угол ϕ является прямым углом прямоугольного треугольника, поэтому два или более из упомянутых выше значений x, y и угла θ могут быть использованы для вычисления длины l иглы 1200 с помощью одного или более из следующих уравнений:



[000171] Следует отметить, что включение в приведенные выше уравнения расстояния смещения l1 необходимо в одном из вариантов осуществления настоящего изобретения, проиллюстрированном на фиг.35, для учета смещения между вершиной воображаемого треугольника, задающей вершину угла θ и дистальным кончиком 1202В иглы 1200. Нужно понимать, что в других вариантах осуществления настоящего изобретения система 1500 может быть конфигурирована так, чтобы считать линию y пересекающей дистальный кончик иглы при ее нахождении в приспособлении для крепления иглы, что устраняет необходимость в упомянутом выше коэффициенте l1 смещения. Соответственно, эти и другие вариации смещения не выходят за рамки объема настоящего изобретения.
[000172] Одно или более упомянутых выше вычислений для определения длины иглы 1200 могут выполняться процессором 1122 или другим подходящим компонентом системы 11100 наведения или системы 1500 определения длины иглы. Следует отметить, что в одном из вариантов осуществления настоящего изобретения система 1500 определения длины иглы и система 1110 наведения объединены в одну систему.
[000173] В соответствии с одним из вариантов осуществления настоящего изобретения, на примере фиг.35, определение длины иглы 1200 выполняют следующим образом: сначала систему 1110 наведения калибруют для учета всех магнитных полей, присутствующих в окружающей среде. Затем иглу 1200 устанавливают в удерживающий канал 1512, находящийся на узле 1516 направления иглы, таким образом, что дистальный конец 1202 В канюли 1202 входит в соприкосновение с закрытым дистальным концом 1512В канала. Положение магнитного элемента 1210 иглы 1200 в координатном пространстве x-y-z определяется системой 1110 (описано более подробно выше в отношении фиг.18-24), что дает длины сторон x и y воображаемого треугольника на фиг.35. Длины сторон x и y вместе с углом θ, известным за счет установки иглы 1200 в удерживающий канал 1512, позволяют процессору 1122 (фиг.18) или другому подходящему компоненту вычислить длину иглы с использованием одного или более из приведенных выше уравнений (1)-(3). Определение длины иглы таким образом в настоящем описании называют также триангуляцией.
[000174] После определения длины иглы 1200 в соответствии с предшествующим описанием система использует это значение для точного отслеживания и отображения иглы на дисплее вместе с изображением ультразвуковой визуализации, в соответствии с предшествующим описанием, во время процедуры установки иглы с помощью ультразвуковой визуализации. Изображение иглы, отображаемое на изображении ультразвуковой визуализации, таким образом, имеет точный размер, что помогает системе 1110 наведения обеспечивать ее точное наведение. Длина иглы и другие описанные выше параметры могут временно или постоянно храниться, например, в процессоре/памяти 1122, например, для будущего использования с этой же иглой или с аналогичными ей иглами. В одном из вариантов осуществления настоящего изобретения пользователь может назначать сохраненную длину иглы для клавиши или другого интерфейсного компонента системы, в этом случае, когда в будущем используется аналогичная игла, система может без затруднений ее распознать.
[000175] Следует отметить, что в дополнение к изложенным выше для определения длины иглы могут применяться и другие подходящие уравнения, включая тригонометрические, алгебраические и геометрические уравнения. Например, в одном из вариантов осуществления настоящего изобретения для определения длины иглы может применяться закон синусов, например, в случаях, когда упомянутый воображаемый треугольник не является прямоугольным. В данном варианте осуществления настоящего изобретения приспособление для крепления иглы, например, канал 1512 фиг.35, представляет собой часть узла 1516 направления иглы, крепящуюся к зонду. В другом варианте осуществления настоящего изобретения, однако, такое приспособление представляет собой отдельное устройство, прикрепленное к зонду. Приспособление для крепления иглы может крепиться к зонду с возможностью съема или на постоянной основе. Также, в одном из вариантов осуществления настоящего изобретения упомянутое приспособление может быть заранее прикреплено к игле, так что пользователю необходимо лишь закрепить приспособление к зонду, тогда как игла уже установлена в приспособлении. Также следует отметить, что величина угла θ может отличаться от проиллюстрированной на фиг.4, и не должна считаться ограниченной этим примером.
[000176] В одном из вариантов осуществления настоящего изобретения известные смещения учитывают как коэффициенты при определении длины иглы, включая, например, смещение дистального кончика иглы относительно плоскости y, когда игла полностью посажена в приспособление для крепления иглы. Эти и другие факторы, участвующие в вычислении длины иглы, соответственно, не выходят за рамки объема настоящего изобретения. Следует также отметить, что в других вариантах осуществления настоящего изобретения магнитный элемент может включать другие компоненты, например, излучающий электромагнитный сигнал источник, обнаруживаемый одним или более датчиками электромагнитного сигнала ультразвукового зонда. При этом в других вариантах осуществления настоящего изобретения упомянутое приспособление может находиться в другом местоположении, а не входить в состав зонда, или может быть конфигурировано для приема в нем другой части иглы, вместо кончика иглы, например, коннектора иглы. Таким образом, варианты осуществления настоящего изобретения не должны быть ограничено тем, чтобы было явно проиллюстрировано и описано.
[000177] Определение длины иглы системой 1500 определения длины иглы перед отслеживанием и введением иглы 1200 в тело пациента в соответствии с предшествующим описанием обеспечивает дополнительную гибкость в системе 11100 наведения иглы. А именно, как отмечалось ранее, калибровка системы 1110 наведения выполняется, как правило, перед приближением иглы 1200, включающей магнитный элемент 1210, к массиву 1190 датчиков, расположенных в зонде 1140 (фиг.35). В другом варианте осуществления настоящего изобретения, однако, калибровка системы 1110 наведения может выполняться, когда игла 1200 расположена вблизи датчиков 1192 массива 1190 датчиков, например, когда игла размещена в удерживающем канале 1512, при условии, что длина иглы уже была определена системой 1500 определения длины иглы.
[000178] Более детально, магнитная обстановка вокруг зонда 1140 может быть в общем случае представлена как:

где Z' - магнитная обстановка, обнаруживаемая массивом 1190 датчиков, A - магнитное поле магнитного элемента 1210 иглы 1200, обнаруживаемое массивом 1190 датчиков (в комбинации с определением длины иглы в соответствии с предшествующим описанием в связи с фиг.35-37), когда дистальный конец иглы посажен в удерживающий канал 1512, как показано на фиг.35, а Z - искомая окружающая магнитная обстановка, то есть магнитная обстановка без поля магнитного элемента 1210 иглы.
[000179] Определение длины иглы 1200 системой 1500 в соответствии с предшествующим описанием в связи с фиг.35 включает измерение магнитного поля магнитного элемента 1210 иглы, которое обозначено в уравнении 4 как А. Следовательно, в качестве части последующей процедуры калибровки система 1110 наведения в одном из вариантов осуществления настоящего изобретения может учитывать магнитное поле А магнитного элемента 1210 иглы, найденное во время определения длины иглы (или в некоторых случаях, с помощью отдельной процедуры), и вычитать его во время регистрации окружающей магнитной обстановки Z', что в общем случае иллюстрируется следующим уравнением:

Другими словами, система 1110 наведения, зная магнитное поле А магнитного элемента 1210 иглы, может учитывать это поле и исключать его из измеренной окружающей магнитной обстановки Z', что дает искомую окружающую магнитную обстановку Z, необходимую для точного отслеживания иглы 1200 системой 1110 наведения после начала перемещения иглы врачом. Следовательно, нужно понимать, что в одном из вариантов осуществления настоящего изобретения система наведения иглы может быть откалибрована для определения окружающей магнитной обстановки, даже когда игла, включающая магнитный элемент, находится относительно близко к массиву датчиков системы. В одном из вариантов осуществления настоящего изобретения магнитное поле магнитного элемента иглы определяют в течение описанной выше процедуры формирования изображения и введения иглы. В другом варианте осуществления настоящего изобретения магнитное поле магнитного элемента определяют заранее и сохраняют в памяти системы наведения иглы.
[000180] Нужно понимать, что определение длины иглы в соответствии с описанием настоящего изобретения может также выполняться с использованием систем наведения, в которых не применяются постоянные магниты, такие, например, как реализованные в магнитном элементе 1210 в варианте осуществления настоящего изобретения, описанного в связи с фиг.35-37. Примеры других систем наведения показаны, к примеру, на фиг.27-30. Также следует отметить, что магнитный элемент в одном из вариантов осуществления настоящего изобретения может быть размещен в различных местоположениях по длине иглы.
[000181] Варианты осуществления настоящего изобретения могут быть реализованы в других конкретных формах без выхода за рамки объема настоящего изобретения. Во всех отношениях описанные варианты осуществления настоящего изобретения должны рассматриваться исключительно как иллюстративные, а не как ограничивающие настоящее изобретение. Объем настоящего изобретения, соответственно, задан пунктами приложенной формулы изобретения, а не приведенным выше описанием. Все изменения, не противоречащие пунктам формулы изобретения с учетом эквивалентности признаков, считаются не выходящими за рамки объема настоящего изобретения.
Реферат
Группа изобретений относится к медицинской технике, а именно к средствам установки катетера в сосудистой системе пациента. Способ определения длины медицинского компонента для использования с системой ультразвуковой визуализации, включающей зонд, включает расположение медицинского компонента в заранее заданной ориентации относительно ультразвукового зонда так, что между медицинским компонентом и ультразвуковым зондом задан первый угол, обнаружение характеристики, относящейся к медицинскому компоненту, по меньшей мере одним датчиком для определения его положения в двух пространственных измерениях и вычисление длины медицинского компонента с использованием первого угла и определенного в двух измерениях положения части медицинского компонента. Способ определения длины иглы системой ультразвуковой визуализации включает расположение иглы так, что первое положение дистального конца иглы и первый угол, заданный между иглой и опорной плоскостью, известны системе, определение положения магнитного элемента, входящего в состав иглы, и вычисление длины иглы с использованием первого положения, первого угла и положения магнитного элемента, которое было определено. Система определения длины иглы включает множество магнитных датчиков, установленных в опорной плоскости в ультразвуковом зонде, приспособление для крепления, которое удерживает иглу с возможностью ее отсоединения так, что упомянутая игла образует первый угол относительно опорной плоскости, при этом игла включает магнитный элемент, размещенный вблизи ее проксимального конца, и процессор для определения положения по оси x и положения по оси y
Формула
Документы, цитированные в отчёте о поиске
Инструмент для биопсии и одноразовый комплект инструментов для биопсии
Комментарии