Узел иглы, включающий выровненный магнитный элемент - RU2669621C2
Код документа: RU2669621C2
Чертежи




































Описание
ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА СМЕЖНЫЕ ЗАЯВКИ
Настоящая заявка является частичным продолжением заявки на патент США №13/118,138, поданной 27 мая 2011 г., озаглавленной «Устройство для применения с системой направления при введении иглы», которая является частичным продолжением заявки на патент США №13/118,033, поданной 27 мая 2011 г., озаглавленной «Система направления при введении игл и медицинских компонентов», которая является частичным продолжением заявки на патент США №12/323,273, поданной 25 ноября 2008 г., озаглавленной «Интегрированная система для внутрисосудистого размещения катетера», в настоящее время - патент США №8,388,541. Настоящая заявка испрашивает преимущество по предварительным заявкам на патенты США №№: 61/707,782, поданной 28 сентября 2012 г., озаглавленной «Компенсация для магнитного элемента с различными магнитной и физической осями для введения в медицинское устройство»; 61/709,877, поданной 4 октября 2012 г., озаглавленной «Выравнивание множества магнитных элементов с различными магнитной и физической осями для применения в медицинском устройстве»; и 61/774,512, поданной 7 марта 2013 г., озаглавленной «Системы и способы выравнивания магнитного элемента с компонентом иглы». Каждая из вышеупомянутых заявок полностью включена в настоящий документ путем ссылки.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Вкратце, варианты осуществления настоящего изобретения относятся к интегрированной системе размещения катетера, предназначенной для точного размещения катетера внутри сосудистой сети пациента. В интегрированной системе используются по меньшей мере две функции для повышения точности размещения катетера: 1) направление с ультразвуковым контролем для введения катетера в сосудистую сеть пациента; и 2) система определения местоположения кончика (TLS) или отслеживание кончика катетера на магнитной основе (например, посредством постоянного (-ых) магнита (-ов) или электромагнита (-ов)) в процессе его продвижения через сосудистую сеть для обнаружения и упрощения коррекции любого неправильного позиционирования кончика во время такого продвижения.
В одном варианте осуществления интегрированная система содержит пульт управления системой, включающий управляющий процессор, датчик определения местоположения кончика для временного размещения на части тела пациента и ультразвуковой зонд. Датчик определения местоположения кончика регистрирует магнитное поле зонда-стилета, размещенного в просвете катетера, когда катетер размещен в сосудистой сети. Ультразвуковой зонд обеспечивает ультразвуковую визуализацию части сосудистой сети до введения катетера в сосудистую сеть. Кроме того, ультразвуковой зонд включает пользовательские устройства управления для управления применением ультразвукового зонда в ультразвуковом режиме и применением датчика определения местоположения кончика в режиме определения местоположения кончика.
В другом варианте осуществления в систему включена третья функция, т.е. направление кончика катетера по сигналу ЭКГ, для обеспечения направления кончика катетера в желательное положение относительно узла сердца пациента, с которого получают сигнал ЭКГ.
Кроме того, варианты осуществления настоящего описания также относятся к системе направления для помощи при введении иглы или другого медицинского компонента в организм пациента. В системе направления используется ультразвуковая визуализация или другая подходящая технология визуализации.
В одном варианте осуществления система направления содержит устройство визуализации, включающее зонд, для получения изображения целевой внутренней части тела пациента, такой как, например, подкожный сосуд. В зонд включены один или более датчиков. Датчики регистрируют связанную с иглой обнаруживаемую характеристику, такую как магнитное поле магнита, включенного в иглу.
Система включает процессор, который применяет данные, связанные с регистрируемой датчиками обнаруживаемой характеристикой, для определения положения и/или ориентации иглы в трех пространственных измерениях. Система включает дисплей для отображения положения и/или ориентации иглы вместе с изображением цели.
В дополнение к магнитному обнаружению раскрыты и другие функции детекции медицинского компонента, включая системы на основе оптического и электромагнитного сигналов.
В одном варианте осуществления зонд-стилет, включающий один или более магнитных элементов, съемно вводят в иглу для обеспечения отслеживания иглы посредством обнаружения магнитных элементов датчиком, включенным в ультразвуковой зонд. В одном варианте осуществления датчик представляет собой кольцевой датчик, размещенный вокруг части ультразвукового зонда. В другом варианте осуществления зонд-стилет может дополнительно включать датчик деформации, который обнаруживает изгиб иглы в процессе введения в организм пациента. Обратная связь от датчика деформации может поступать в систему и учитываться для более точного отображения положения иглы на дисплее.
В другом варианте осуществления магнитный элемент выполнен в виде пассивного тороидального магнита, образующего отверстие, через которое проходит канюля иглы. В другом варианте осуществления также раскрыт узел иглы, включающий муфту, канюлю и магнитный элемент, причем магнитная ось магнитного элемента выполнена с возможностью соосного выравнивания с канюлей иглы. Также раскрыты приспособления и устройства для выравнивания такого магнитного элемента.
Данные и другие признаки вариантов осуществления настоящего изобретения будут более очевидными из представленного ниже описания и приложенной формулы изобретения или могут быть изучены при практической реализации вариантов осуществления настоящего изобретения, как представлено в настоящем документе ниже.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
Более конкретное описание настоящего изобретения будет представлено путем ссылки на конкретные варианты его осуществления, которые показаны на приложенных рисунках. Следует понимать, что эти рисунки показывают только типичные варианты осуществления настоящего изобретения и поэтому не должны рассматриваться как ограничивающие его объем. Примеры вариантов осуществления настоящего изобретения будут описаны и пояснены с дополнительной конкретизацией и детализацией путем применения сопроводительных рисунков, на которых:
на ФИГ. 1 представлена блок-схема, показывающая различные элементы интегрированной системы для внутрисосудистого размещения катетера, в соответствии с одним примером осуществления настоящего изобретения;
на ФИГ. 2 представлен упрощенный вид пациента и катетера, вводимого в него с помощью интегрированной системы, изображенной на ФИГ. 1;
на ФИГ. 3А и 3В представлены виды зонда интегрированной системы, изображенной на ФИГ. 1;
на ФИГ. 4 представлен мгновенный снимок ультразвукового изображения, показанного на дисплее интегрированной системы, изображенной на ФИГ. 1;
на ФИГ. 5 представлен вид в перспективе зонда-стилета, используемого в связи с системой, изображенной на ФИГ. 1, при размещении катетера внутри сосудистой сети пациента;
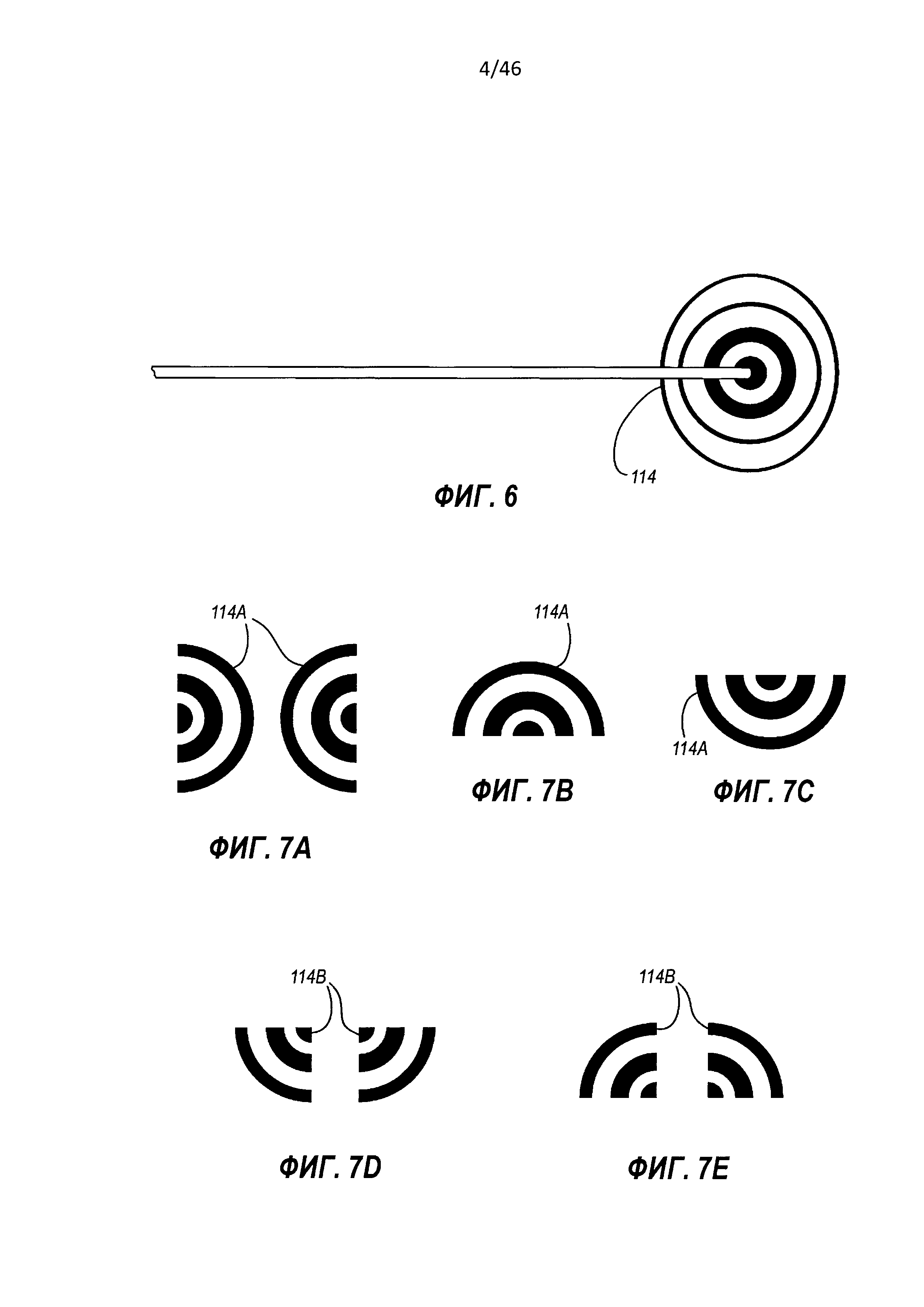
на ФИГ. 6 представлена пиктограмма, показанная на дисплее интегрированной системы, изображенной на ФИГ. 1, которая указывает положение дистального конца зонда-стилета, изображенного на ФИГ. 5, во время процедур размещения кончика катетера;
на ФИГ. 7А-7Е показаны различные примеры пиктограмм, которые могут быть показаны на дисплее интегрированной системы, изображенной на ФИГ. 1, во время процедур размещения кончика катетера;
на ФИГ. 8А-8С представлены мгновенные снимки изображений, показанных на дисплее интегрированной системы, изображенной на ФИГ. 1, во время процедур размещения кончика катетера;
на ФИГ. 9 представлена блок-схема, показывающая различные элементы интегрированной системы для внутрисосудистого размещения катетера, в соответствии с другим примером осуществления настоящего изобретения;
на ФИГ. 10 представлен упрощенный вид пациента и катетера, вводимого в него с помощью интегрированной системы, изображенной на ФИГ. 9;
на ФИГ. 11 представлен вид в перспективе зонда-стилета, используемого в связи с интегрированной системой, изображенной на ФИГ. 9, при размещении катетера внутри сосудистой сети пациента;
на ФИГ. 12А-12Е представлены различные виды частей зонда-стилета, изображенного на ФИГ. 11;
на ФИГ. 13A-13D представлены различные виды узла пластинчатого соединителя для применения с интегрированной системой, изображенной на ФИГ. 9;
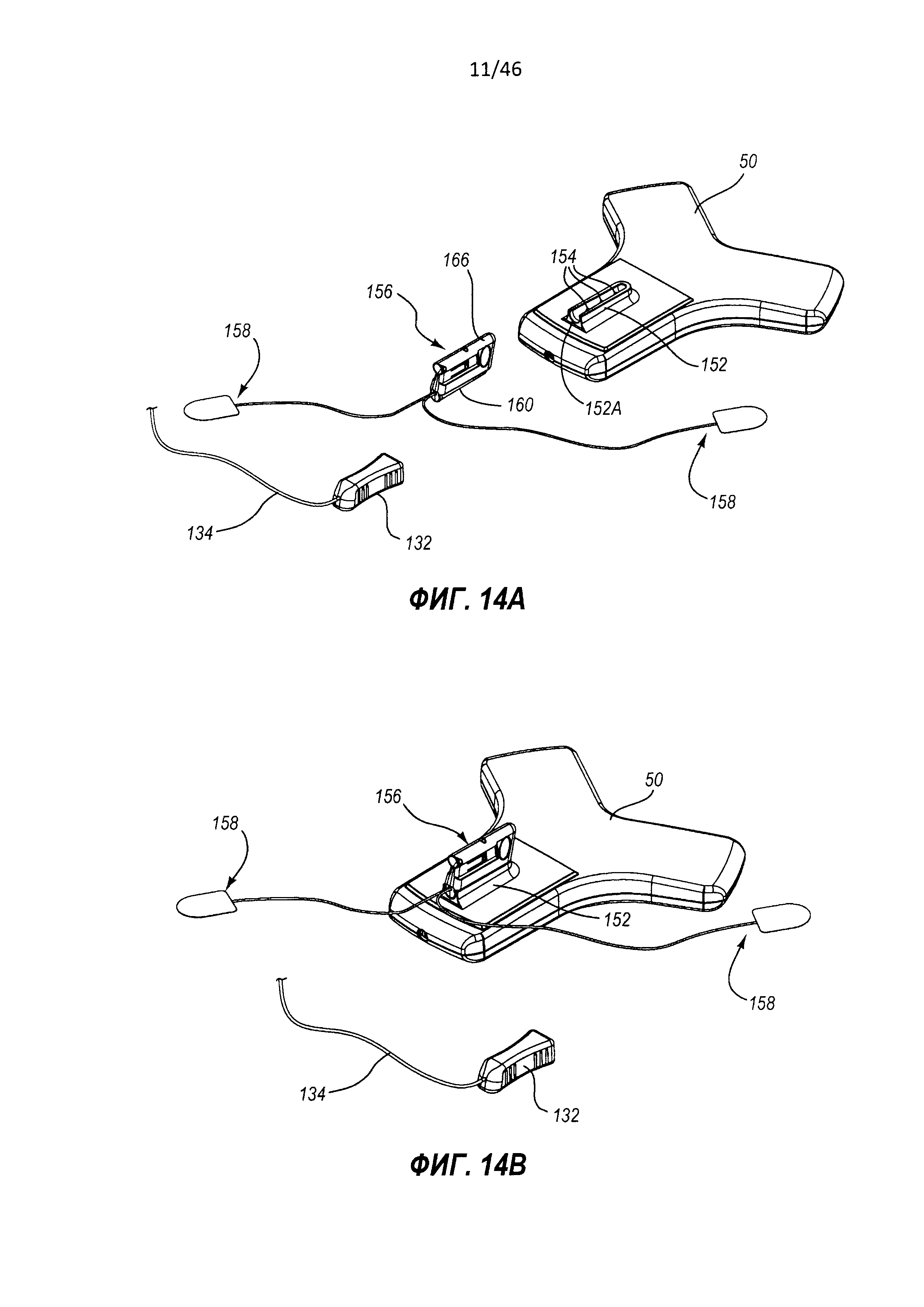
на ФИГ. 14А-14С представлены виды, на которых показана связь кабель-троса зонда-стилета и пластинчатого соединителя с датчиком интегрированной системы, изображенной на ФИГ. 9;
на ФИГ. 15 представлен вид в сечении соединения кабель-троса зонда-стилета, пластинчатого соединителя и датчика, показанного на ФИГ. 14С;
на ФИГ. 16 представлен упрощенный вид ЭКГ пациента;
на ФИГ. 17 представлен мгновенный снимок изображения, показываемого на дисплее интегрированной системы, изображенной на ФИГ. 9, во время процедур размещения кончика катетера;
на ФИГ. 18 представлена блок-схема, показывающая различные элементы системы направления с ультразвуковым контролем для игл и других медицинских компонентов, в соответствии с одним вариантом осуществления;
на ФИГ. 19 представлен упрощенный вид пациента и вводимого в него катетера, показывающий один возможный вариант осуществления, в соответствии с которым систему направления, изображенную на ФИГ. 18, можно реализовать на практике;
на ФИГ. 20 представлен вид сверху ультразвукового зонда системы направления, изображенной на ФИГ. 18;
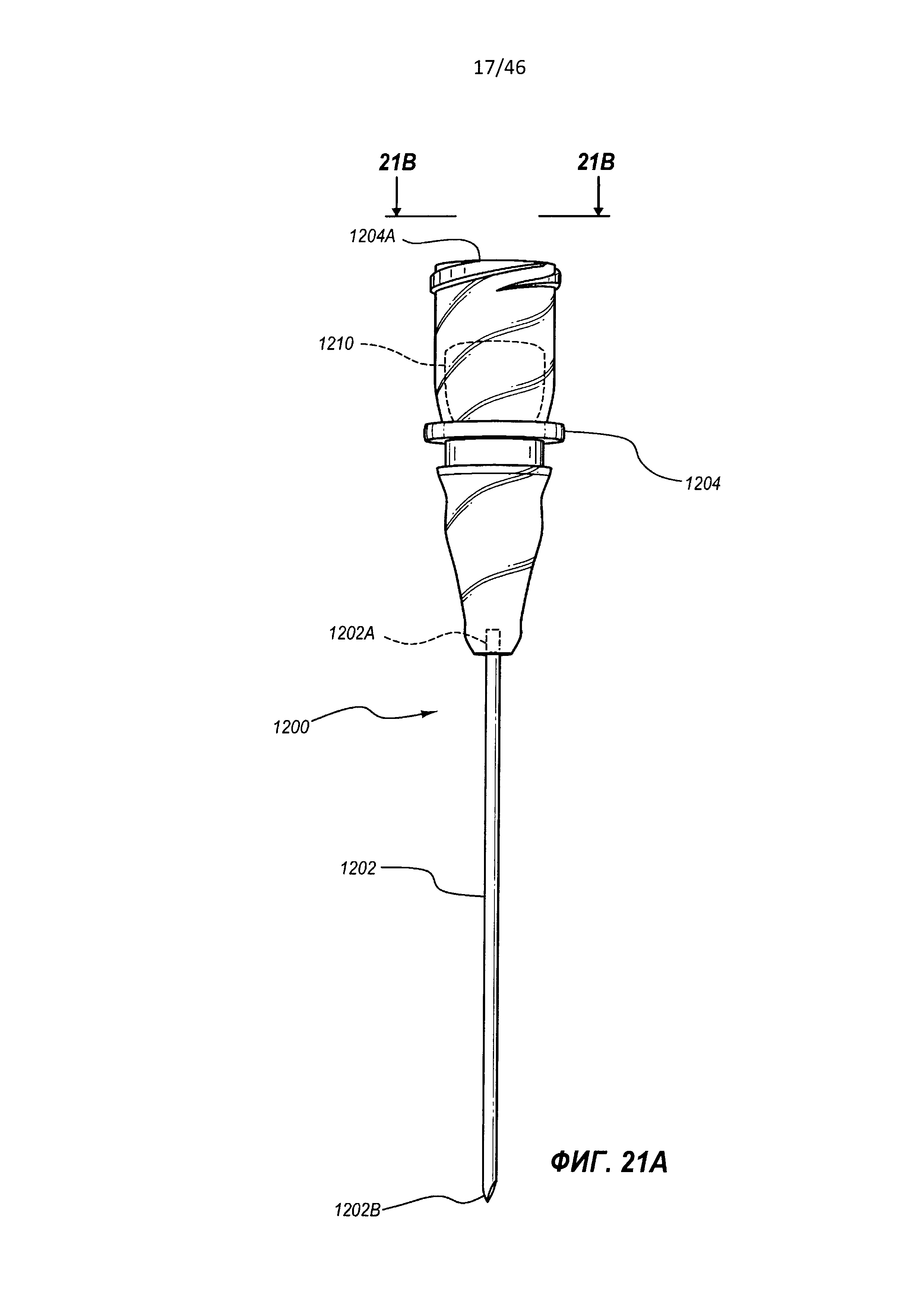
на ФИГ. 21А представлен вид сбоку иглы для применения с системой направления, изображенной на ФИГ. 18, в соответствии с одним вариантом осуществления;
на ФИГ. 21В представлен вид с торца иглы, изображенной на ФИГ. 21А;
на ФИГ. 22А и 22В представлены упрощенные виды ультразвукового зонда системы направления, применяемой для направления иглы к сосуду внутри тела пациента;
на ФИГ. 23А и 23В показаны возможные мгновенные снимки для отображения на дисплее системы направления, на которых показаны положение и ориентация иглы, в соответствии с одним вариантом осуществления;
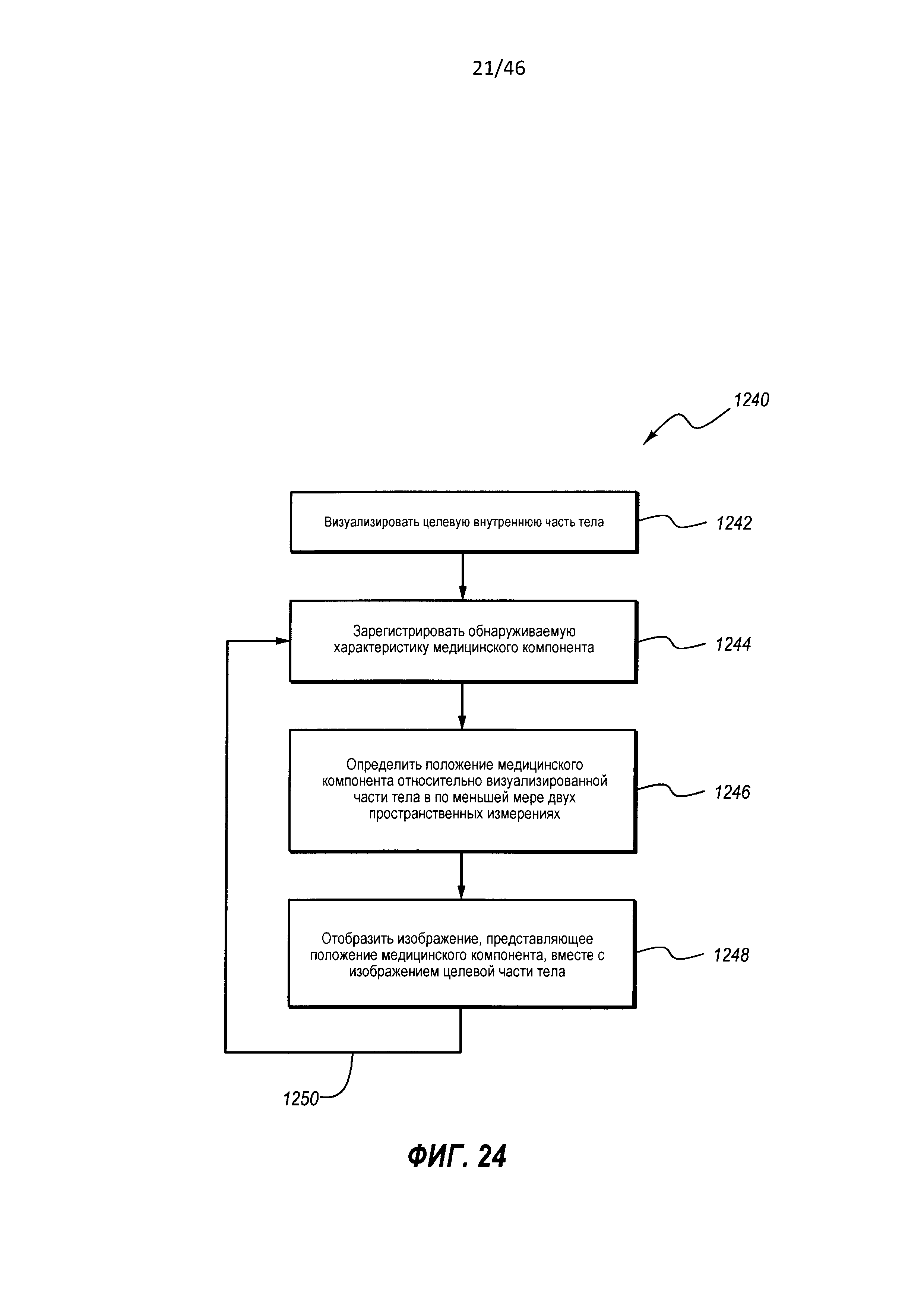
на ФИГ. 24 показаны различные стадии способа направления иглы к желательной цели внутри тела пациента в соответствии с одним вариантом осуществления;
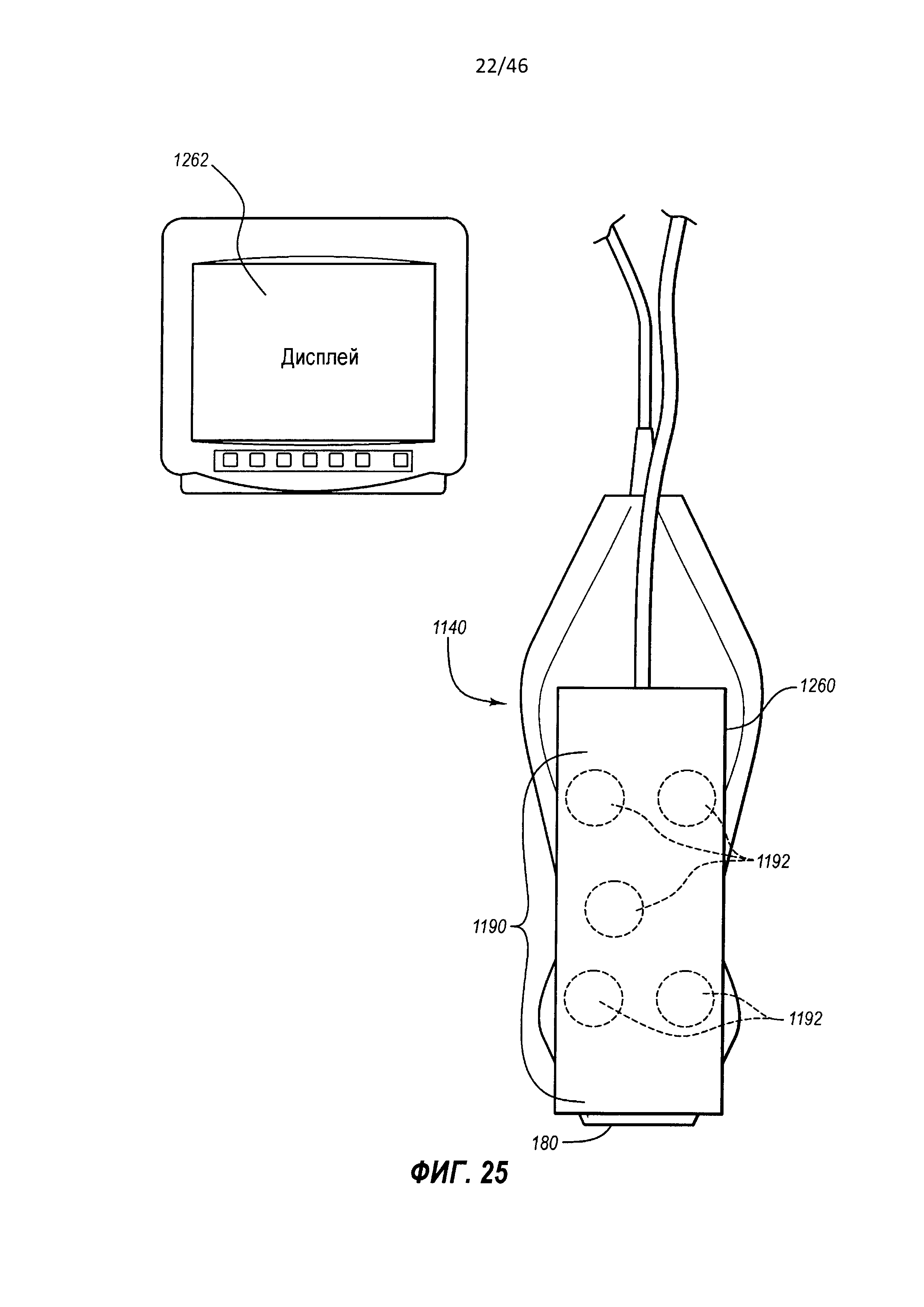
на ФИГ. 25 показана совокупность датчиков для прикрепления к ультразвуковому зонду и связанный дисплей в соответствии с одним вариантом осуществления;
на ФИГ. 26 представлен упрощенный вид пистолетного держателя иглы для применения с системой направления, изображенной на ФИГ. 18, в соответствии с одним вариантом осуществления;
на ФИГ. 27 представлен упрощенный вид ультразвукового зонда и иглы, включая элементы оптической системы направления, в соответствии с одним вариантом осуществления;
на ФИГ. 28 показана эксплуатация ультразвукового зонда и иглы, изображенных на ФИГ. 27, в соответствии с одним вариантом осуществления;
на ФИГ. 29 представлен упрощенный вид ультразвукового зонда и иглы, включая элементы системы направления на основе электромагнитного сигнала, в соответствии с одним вариантом осуществления;
на ФИГ. 30 представлен упрощенный вид ультразвукового зонда и иглы, включая элементы системы направления на основе электромагнитного сигнала, в соответствии с другим вариантом осуществления;
на ФИГ. 31A-31D представлены различные виды иглы и соответствующих компонентов для применения с системой направления иглы в соответствии с одним вариантом осуществления;
на ФИГ. 32 представлен вид сбоку иглы для применения с системой направления иглы в соответствии с одним вариантом осуществления;
на ФИГ. 33А и 33В представлены различные виды иглы для применения с системой направления иглы в соответствии с одним вариантом осуществления;
на ФИГ. 34A-34G представлены виды магнитных элементов различной формы для применения с системой направления иглы в соответствии с одним вариантом осуществления;
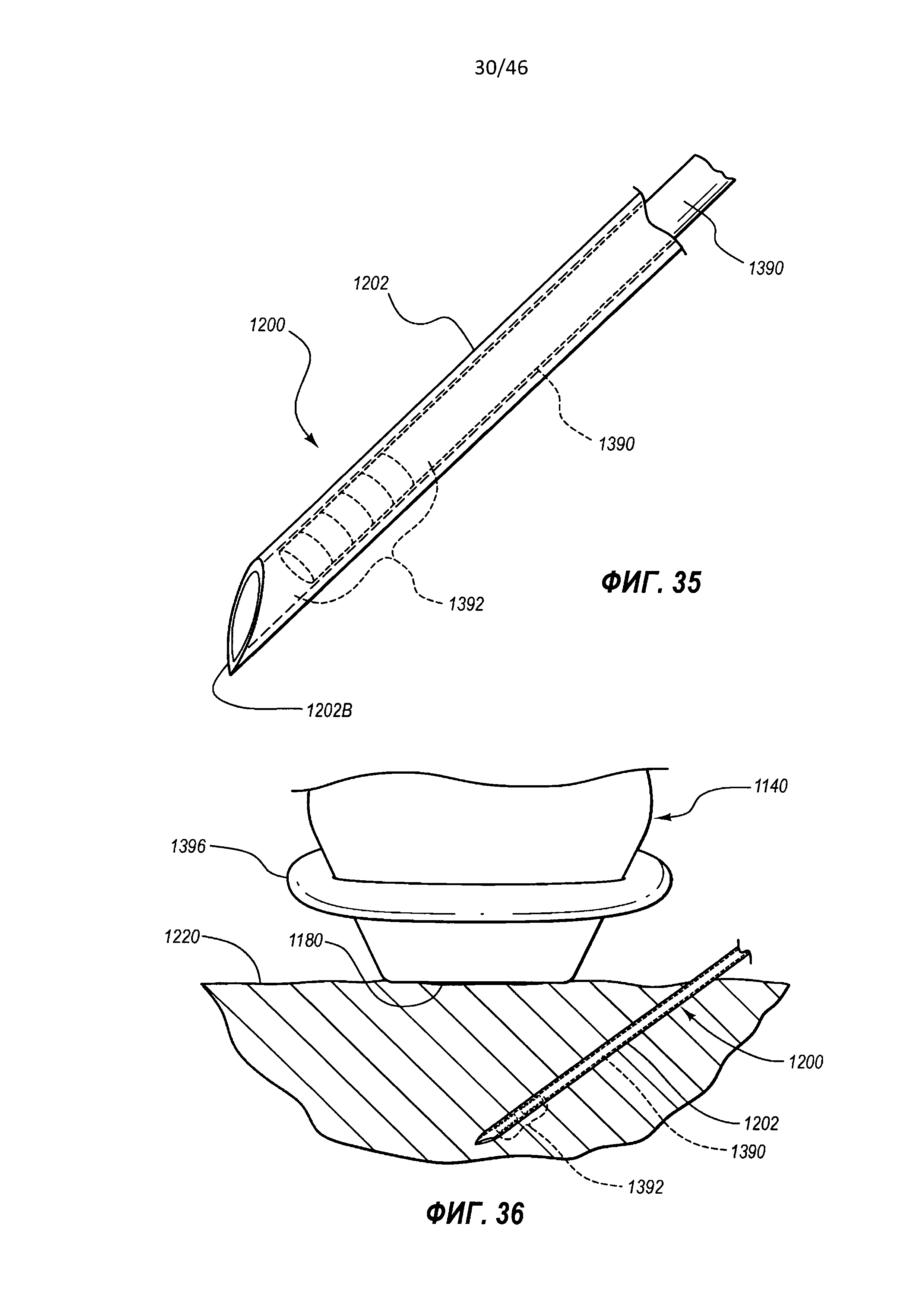
на ФИГ. 35 представлен вид в перспективе дистальной части канюли иглы, включая размещенный в ней зонд-стилет, имеющий магнит, в соответствии с одним вариантом осуществления;
на ФИГ. 36 показана игла, изображенная на ФИГ. 35, в процессе применения с ультразвуковым зондом, включающим кольцевой датчик, в соответствии с одним вариантом осуществления;
на ФИГ. 37 представлен вид в перспективе иглы, включающей размещенный на канюле тороидальный магнит, в соответствии с одним вариантом осуществления;
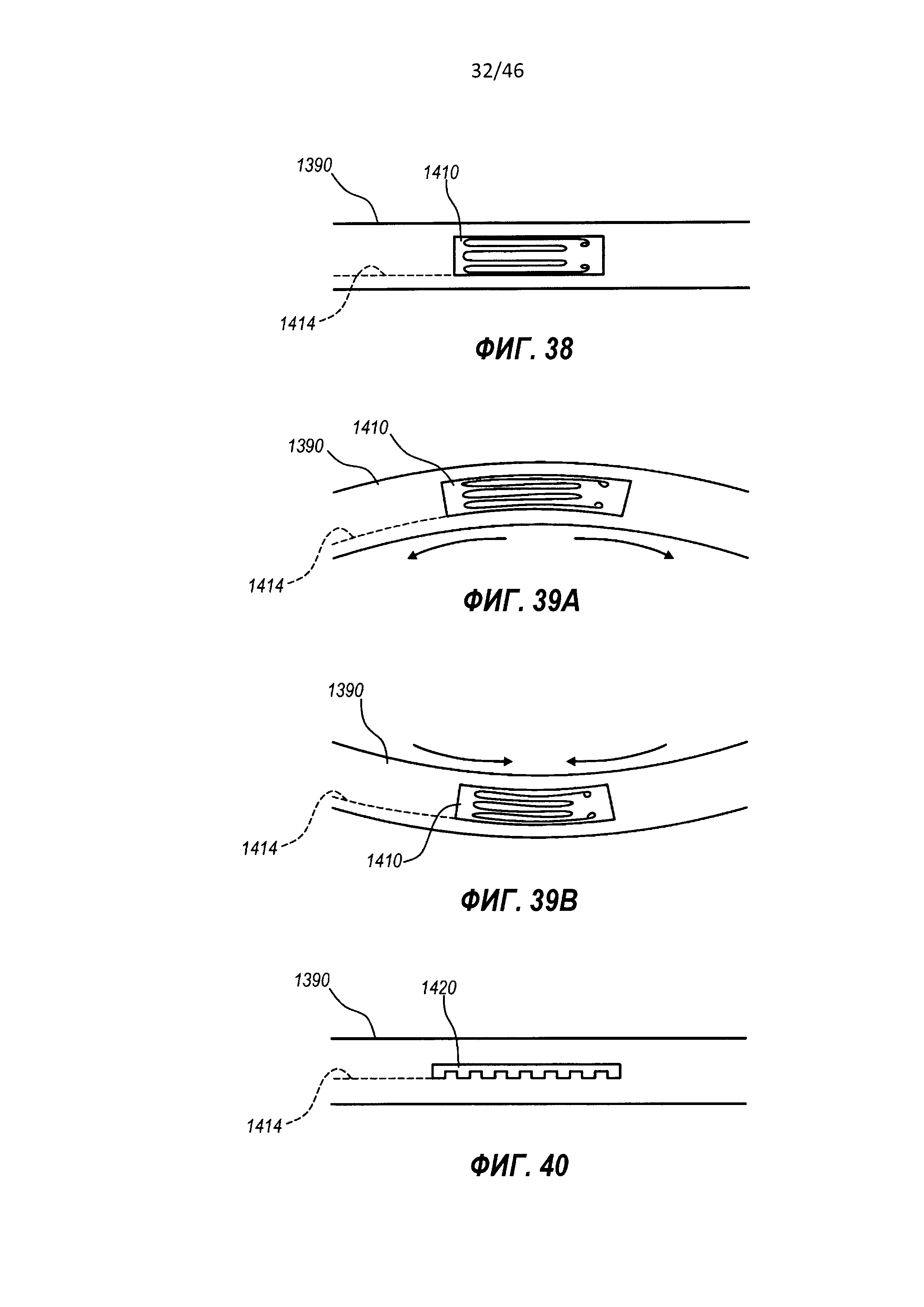
на ФИГ. 38 представлен вид сбоку зонда-стилета, включающего датчик деформации, в соответствии с одним вариантом осуществления;
на ФИГ. 39А-39В показаны зонд-стилет и датчик деформации, изображенные на ФИГ. 38, под действием изгибающего напряжения;
на ФИГ. 40 представлен вид сбоку зонда-стилета, имеющего датчик изгиба, в соответствии с одним вариантом осуществления;
на ФИГ. 41А-41С представлены различные виды узла иглы в соответствии с одним вариантом осуществления;
на ФИГ. 42 представлен вид в перспективе, показывающий различные аспекты магнитного элемента;
на ФИГ. 43 представлен вид сбоку канюли иглы и магнитного элемента в соответствии с одним вариантом осуществления;
на ФИГ. 44 представлен вид сверху кондуктора, муфты иглы и магнитного элемента в соответствии с одним вариантом осуществления;
на ФИГ. 45 представлен вид сверху кондуктора, муфты иглы и магнитного элемента в соответствии с одним вариантом осуществления;
на ФИГ. 46 представлен упрощенный вид магнитного элемента и канюли в соответствии с одним вариантом осуществления;
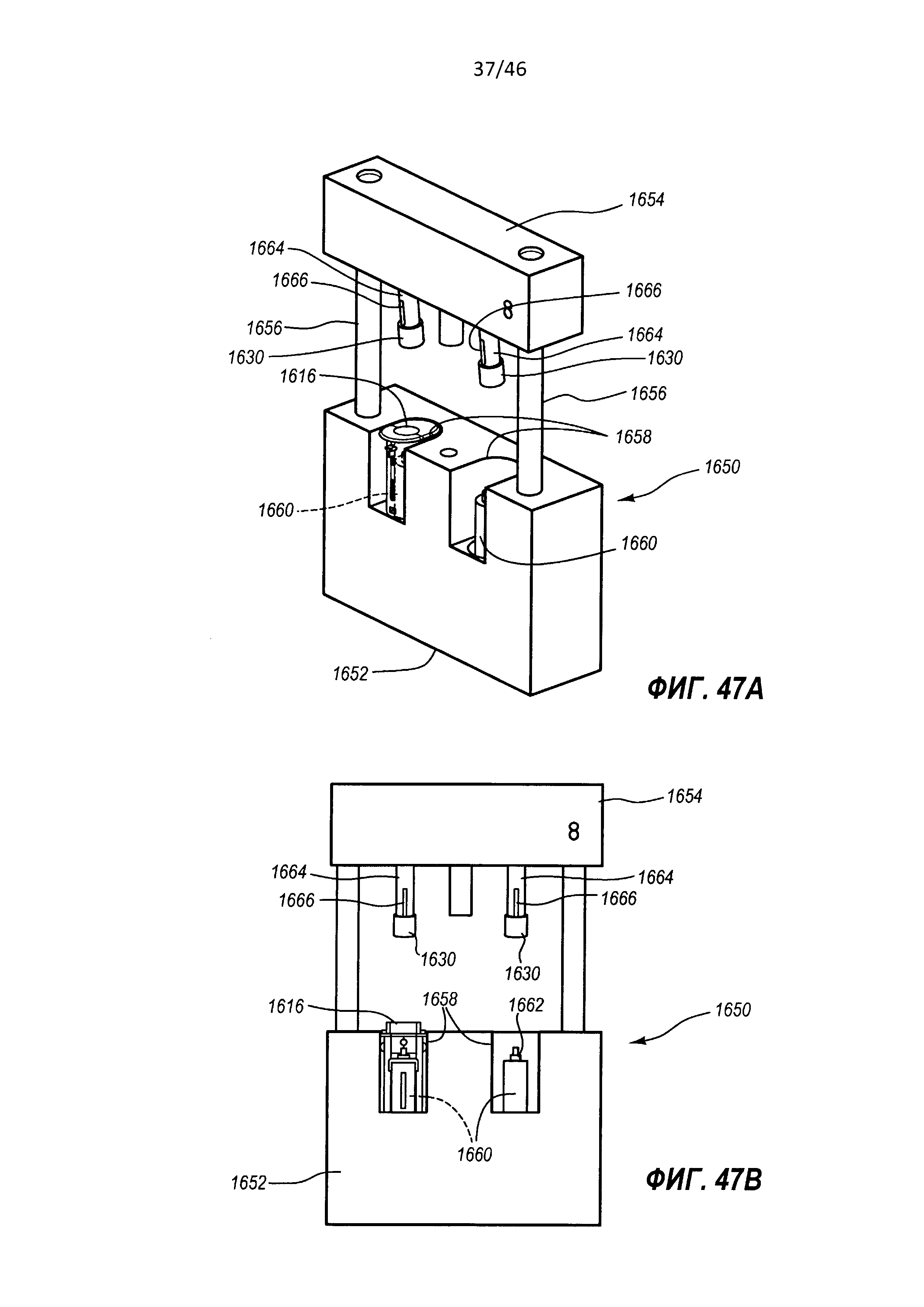
на ФИГ. 47А-48В представлены различные виды приспособления для сопряжения магнитного элемента с частью узла иглы в соответствии с одним вариантом осуществления;
на ФИГ. 49 представлен вид сбоку цилиндра из магнитного материала, применяемого для формирования магнитного элемента, в соответствии с одним вариантом осуществления;
на ФИГ. 50 показана часть цилиндра из магнитного материала, изображенного на ФИГ. 49;
на ФИГ. 51 показано формирование магнитного элемента в соответствии с одним вариантом осуществления;
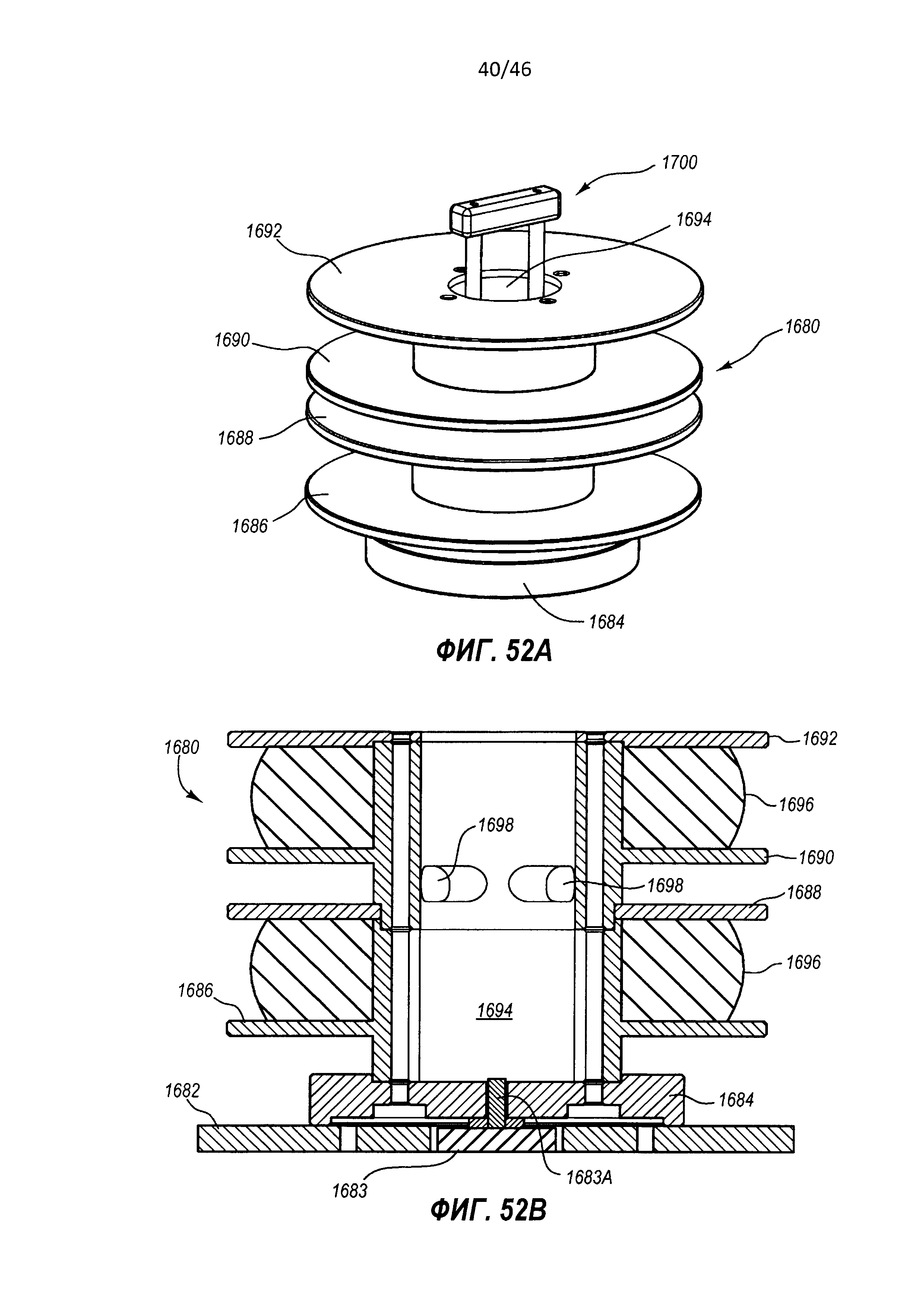
на ФИГ. 52А и 52В показаны различные виды узла выравнивающей катушки в соответствии с одним вариантом осуществления;
на ФИГ. 53А и 53В показано приспособление узла выравнивающей катушки, изображенного на ФИГ. 52А и 52В;
на ФИГ. 54А-54С показаны различные детали приспособления, изображенного на ФИГ. 53А и 53В, в соответствии с одним вариантом осуществления;
на ФИГ. 55А-55С показаны различные виды магнитного элемента и колпачка в соответствии с одним вариантом осуществления;
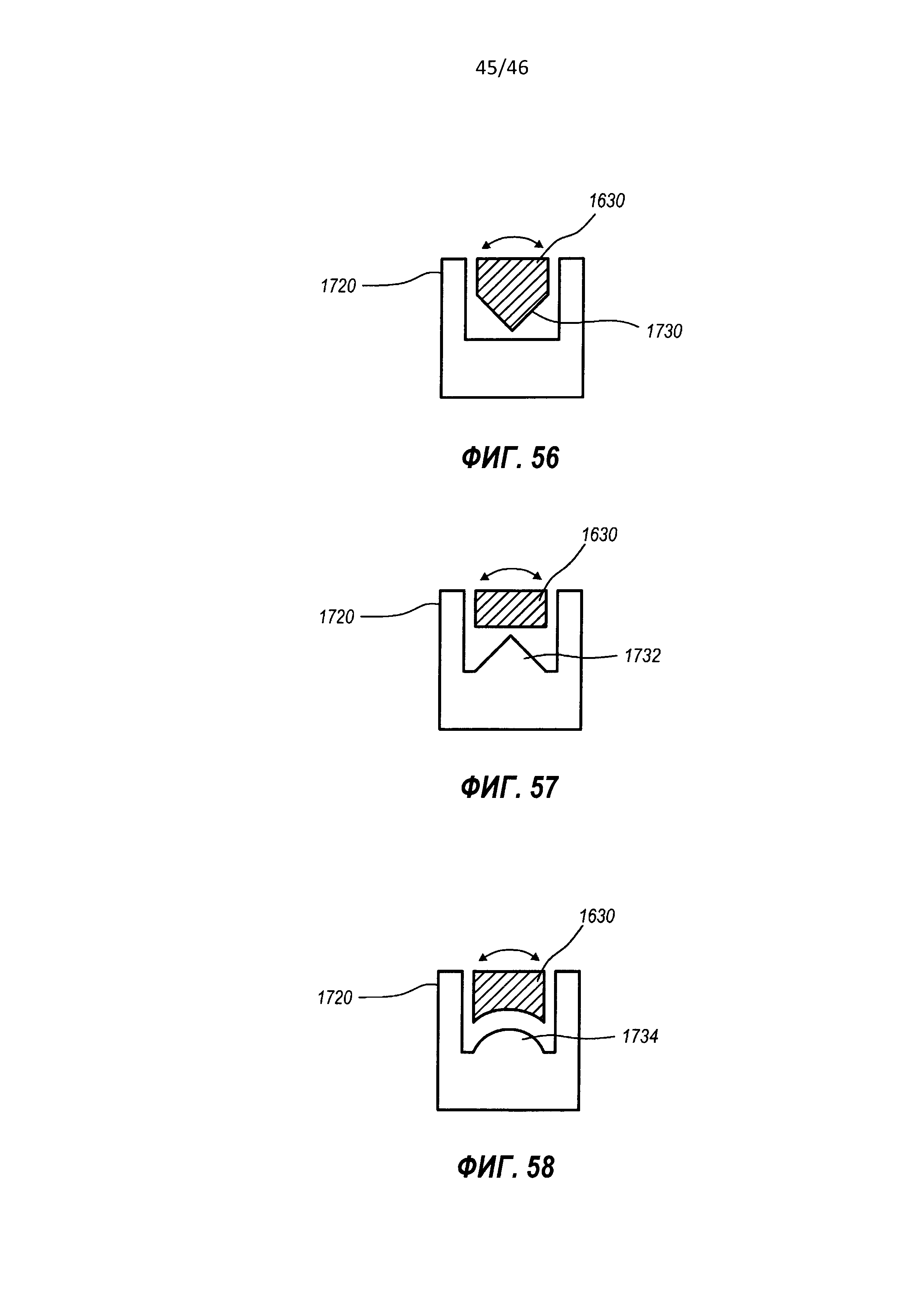
на ФИГ. 56 показана конфигурация колпачка и магнитного элемента в соответствии с одним вариантом осуществления;
на ФИГ. 57 показана конфигурация колпачка и магнитного элемента в соответствии с одним вариантом осуществления;
на ФИГ. 58 показана конфигурация колпачка и магнитного элемента в соответствии с одним вариантом осуществления; и
на ФИГ. 59 показаны детали способа выравнивания магнитного элемента в соответствии с одним вариантом осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ВЫБРАННЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Далее по тексту будут даны ссылки на фигуры, на которых аналогичные структуры будут снабжены аналогичными условными обозначениями. Следует понимать, что рисунки представляют собой графические и схематические представления примеров осуществления настоящего изобретения и что они не ограничивают настоящее изобретение и не обязательно нарисованы в масштабе.
Для ясности следует понимать, что слово «проксимальный» относится к направлению, относительно более близкому к врачу, применяющему устройство, которое описано в настоящем документе, а слово «дистальный» относится к направлению, относительно удаленному от врача. Например, конец иглы, размещенный внутри тела пациента, считается дистальным концом иглы, а конец иглы, остающийся снаружи тела - проксимальным концом иглы. Кроме того, слова «включающий», «имеет» и «имеющий» в настоящем документе имеют то же значение, что и слово «содержащий».
I. Ассистированное размещение катетера
Варианты осуществления настоящего изобретения по существу относятся к системе размещения катетера, предназначенной для точного размещения катетера внутри сосудистой сети пациента. В одном варианте осуществления в системе размещения катетера используется по меньшей мере две функции для повышения точности размещения катетера: 1) направление с ультразвуковым контролем для введения катетера в сосудистую сеть пациента; и 2) система определения местоположения кончика/навигации (TLS) или отслеживание кончика катетера на магнитной основе в процессе его продвижения через извитый путь по сосудистой сети для обнаружения и упрощения коррекции любого неправильного позиционирования кончика во время такого продвижения. Элементы ультразвукового контроля направления и определения местоположения кончика настоящей системы в соответствии с одним вариантом осуществления интегрированы в одно устройство для применения врачом, выполняющим размещение катетера. Интеграция данных двух функций в одном устройстве упрощает процесс размещения катетера и приводит к относительному ускорению размещения катетера. Например, интегрированная система размещения катетера позволяет наблюдать за работой системы ультразвукового контроля направления и TLS на одном дисплее интегрированной системы. Кроме того, для управления функциональностью системы можно применять устройства управления, размещенные на ультразвуковом зонде интегрированного устройства, причем в процессе размещения катетера зонд поддерживается внутри стерильного поля пациента, таким образом исключая для врача необходимость выходить за пределы стерильного поля для управления системой.
В другом варианте осуществления в интегрированную систему включена третья функция, т.е. направление кончика катетера по сигналу ЭКГ, для обеспечения направления кончика катетера в желательное положение относительно узла сердца пациента, с которого снимаются сигналы ЭКГ. Такую помощь при позиционировании на основе ЭКГ в настоящем документе также называют «подтверждением кончика».
Комбинация трех вышеуказанных функций в соответствии с одним вариантом осуществления позволяет системе размещения катетера облегчать размещение катетера внутри сосудистой сети пациента при относительно высоком уровне точности, т.е. размещать дистальный кончик катетера в заданном желательном положении. Более того, благодаря направлению кончика катетера на основе ЭКГ можно подтвердить правильность размещения кончика без необходимости в подтверждающей рентгенографии. Это, в свою очередь, снижает получаемую пациентом дозу потенциально вредного рентгеновского излучения, стоимость и время транспортировки пациента в рентгенографическое отделение и из него, избавляет от затратных и неудобных процедур изменения положения катетера ит.д.
На ФИГ. 1 и 2 впервые показаны различные компоненты системы размещения катетера («система»), по существу обозначенной 10, в конфигурации в соответствии с одним примером осуществления настоящего изобретения. Как показано, система 10 по существу включает пульт управления 20, дисплей 30, зонд 40 и датчик 50, каждый из которых дополнительно более подробно описан ниже.
На ФИГ. 2 показано общее расположение данных компонентов относительно пациента 70 во время процедуры размещения катетера 72 в сосудистой сети пациента через место введения на коже 73. На ФИГ. 2 показано, что катетер 72 по существу включает проксимальную часть 74, которая остается внешней по отношению к пациенту, и дистальную часть 76, которая после завершения размещения находится внутри сосудистой сети пациента. Систему 10 используют для окончательного расположения дистального кончика 76А катетера 72 в желательном положении внутри сосудистой сети пациента. В одном варианте осуществления желательное положение дистального кончика катетера 76А находится вблизи сердца пациента, например, в нижней 1/3 (одной третьей) части верхней полой вены (ВПВ). Конечно, систему 10 можно использовать для размещения дистального кончика катетера в других местах. Проксимальная часть катетера 74 дополнительно включает муфту 74А, которая обеспечивает сообщение по текущей среде между одним или более просветами катетера 72 и одной или более удлиненных ножек 74В, направленных проксимально из муфты.
Пример реализации пульта управления 20 показан на ФИГ. 8С, хотя следует понимать, что пульт управления может принимать одну из различных форм. В пульт управления 20 включен процессор 22, включающий энергонезависимое запоминающее устройство, такое как, например, ЭСППЗУ, для управления функционированием системы в процессе эксплуатации системы 10, выступающий таким образом в роли управляющего процессора. В пульт управления 20 также включен интерфейс цифрового/аналогового контроллера 24, который находится в связи как с процессором 22, так и с другими компонентами системы для управления взаимодействием между зондом 40, датчиком 50 и другими компонентами системы.
Система 10 дополнительно включает порты 52 для соединения с датчиком 50 и необязательными компонентами 54, включая принтер, устройство хранения данных, клавиатуру и т.д. В одном варианте осуществления порты представляют собой порты USB, хотя для данного и других интерфейсных соединений, описанных в настоящем документе, можно применять порты другого типа или комбинацию типов портов. В пульт управления 20 включен разъем питания 56 для обеспечения функционального соединения с внешним источником питания 58. Также можно использовать внутреннюю батарею 60 либо с внешним источником питания, либо вместо него. В интерфейс цифрового/аналогового контроллера 24 пульта управления включена схема управления питанием 59 для контроля использования и распределения питания.
В настоящем варианте осуществления дисплей 30 интегрирован в пульт управления 20 и применяется для отображения информации для врача во время процедуры размещения катетера. В другом варианте осуществления дисплей может быть отделен от пульта управления. Как будет показано, отображаемое на дисплее 30 содержание изменяется в соответствии с текущим режимом работы системы размещения катетера - УЗИ, TLS или - в других вариантах осуществления - подтверждение кончика с помощью ЭКГ. В одном варианте осуществления для немедленного вызова врачом желательного режима на дисплей 30 для ассистирования при процедуре размещения катетера можно применять кнопочный интерфейс пульта управления 32 (см. ФИГ. 1, 8С) и кнопки, предусмотренные на зонде 40. В одном варианте осуществления информация из множества режимов, таких как TLS и ЭКГ, может отображаться одновременно, как на ФИГ. 17. Таким образом, единый дисплей 30 пульта управления системой 20 можно использовать для ультразвукового контроля направления при получении доступа в сосудистую сеть пациента, контроля направления с помощью TLS в процессе продвижения катетера через сосудистую сеть и (как в последующих вариантах осуществления) подтверждения размещения дистального кончика катетера относительно узла сердца пациента на основе ЭКГ. В одном варианте осуществления дисплей 30 представляет собой ЖК-устройство.
На ФИГ. 3А и 3В показаны элементы зонда 40 в соответствии с одним вариантом осуществления. Зонд 40 используют в связи с первой вышеупомянутой функцией, т.е. визуализацией на основе ультразвука (УЗИ) сосуда, такого как вена, при подготовке к введению катетера 72 в сосудистую сеть. Такая визуализация обеспечивает в реальном времени ультразвуковой контроль направления для введения катетера в сосудистую сеть пациента и помогает снизить осложнения, обычно связанные с таким введением, включая непреднамеренный прокол артерии, гематому, пневмоторакс и т.д.
Портативный зонд 40 включает головку 80, в которой расположен набор пьезоэлектрических элементов для генерации ультразвуковых импульсов и приема их эха после отражения организмом пациента, когда головка размещена вплотную к коже пациента вблизи планируемого места введения 73 (ФИГ. 2). Зонд 40 дополнительно включает множество кнопок управления 84, которые могут быть предусмотрены на кнопочной панели 82. В настоящем варианте осуществления функцией системы 10 можно управлять с помощью кнопок управления 84, таким образом для врача устраняется необходимость выходить из стерильного поля, которое создано вокруг места введения у пациента до размещения катетера, для изменения режимов посредством применения кнопочного интерфейса пульта управления 32.
Поэтому в одном варианте осуществления врач использует первую (УЗИ) функцию для определения подходящего места введения и создания сосудистого доступа, например, с помощью иглы или интродьюсера, а затем с помощью катетера. Затем врач может беспрепятственно переключиться посредством нажатия на кнопки на кнопочной панели 82 зонда на вторую функцию (TLS) без необходимости выхода из стерильного поля. После этого режим TLS можно применять для ассистирования при продвижении катетера 72 через сосудистую сеть к предполагаемому месту назначения.
На ФИГ. 1 показано, что зонд 40 дополнительно включает контроллер кнопок и памяти 42 для управления работой кнопок и зонда. В одном варианте осуществления контроллер кнопок и памяти 42 может включать энергонезависимое запоминающее устройство, такое как ЭСППЗУ. Контроллер кнопок и памяти 42 находится в функциональной связи с интерфейсом зонда 44 пульта управления 20, который включает компонент ввода/вывода для пьезоэлементов 44А для взаимодействия с набором пьезоэлектрических элементов зонда и компонент ввода/вывода для кнопок и памяти 44В для взаимодействия с контроллером кнопок и памяти 42.
На ФИГ. 4 показан пример мгновенного снимка 88, показанного на дисплее 30, когда система 10 находится в своей первой, ультразвуковой, функции. Показано изображение 90 подкожной области пациента 70, на котором показано поперечное сечение вены 92. Изображение 90 формируется в результате работы набора пьезоэлектрических элементов зонда 40. На мгновенном снимке дисплея 88 также показан индикатор шкалы глубины 94, дающий информацию о глубине изображения 90 под кожей пациента, шкала размера просвета 96, которая дает информацию о размере вены 92 относительно размеров просвета стандартных катетеров, а также другие информационные указатели 98, которые дают информацию о статусе системы 10 или возможных действиях, которые можно выполнить, например, остановка кадра, шаблоны изображения, сохранение данных, распечатка изображения, статус питания, яркость изображения и т.д.
Следует отметить, что, хотя на изображении 90 показана вена, в других вариантах осуществления возможна визуализация других просветов или частей тела. Следует отметить, что показанный на ФИГ. 4 режим УЗИ при необходимости может быть отображен на дисплее 30 одновременно с другими режимами, такими как режим TLS. В дополнение к визуальному дисплею 30 в системе 10 также может использоваться звуковое оповещение, такое как гудки, тональные сигналы и т.д., для ассистирования врачу при размещении катетера. Более того, предусмотренные на зонде 40 кнопки и кнопочный интерфейс пульта управления 32 могут быть выполнены различными способами, включая применение в дополнение к кнопкам таких устройств управления пользователя, как ползунковые переключатели, перекидные переключатели, электронные или сенсорные панели и т.д. Кроме того, в процессе применения системы 10 обе функции, УЗИ и TLS, можно использовать одновременно или по отдельности.
Как только что было описано, портативный ультразвуковой зонд 40 используется как часть интегрированной системы размещения катетера 10 для обеспечения УЗИ-визуализации периферической сосудистой сети пациента при подготовке к чрескожному введению катетера. Однако в настоящем примере осуществления зонд также используют для управления функциональностью части TLS, или второй функцией, системы 10 при проведении катетера к желательному для него месту назначения внутри сосудистой сети, как описано ниже. И опять, поскольку зонд 40 применяют внутри стерильного поля пациента, эта особенность позволяет полностью управлять функциональностью TLS, не выходя за пределы стерильного поля. Таким образом, зонд 40 представляет собой устройство двойного назначения, обеспечивающее удобное управление как функциональностью УЗИ, так и функциональностью TLS системы 10 из стерильного поля. В одном варианте осуществления зонд также можно использовать для управления всей или частью функциональности ЭКГ, или третьей функции, системы размещения катетера 10, как дополнительно описано ниже.
Система размещения катетера 10 дополнительно включает вторую вышеупомянутую функцию, т.е. TLS на магнитной основе, или систему определения местоположения кончика. TLS позволяет врачу быстро определять и подтверждать положение и/или ориентацию катетера 72, такого как периферически вводимый центральный катетер (ПВЦК), центральный венозный катетер (ЦВК) или другой подходящий катетер, в процессе его исходного размещения в сосудистой сети пациента 70 и продвижения через нее. Более конкретно, функция TLS обнаруживает магнитное поле, генерируемое содержащим магнитный элемент, предназначенный для определения местоположения кончика, зондом-стилетом, который в одном варианте осуществления предварительно загружен в продольно образованный просвет катетера 72, таким образом позволяя врачу определять общее местоположение и ориентацию кончика катетера в организме пациента. В одном варианте осуществления магнитный узел можно отслеживать с применением идей одного или более из следующих патентов США: 5,775,322; 5,879,297; 6,129,668; 6,216,028 и 6,263,230. Содержание вышеупомянутых патентов США полностью включено в настоящий документ путем ссылки. TLS также показывает направление, в котором указывает кончик катетера, таким образом дополнительно помогая точному размещению катетера. TLS дополнительно ассистирует врачу при определении случаев неправильного расположения кончика катетера, таких как случай отклонения кончика от желательного венозного пути в другую вену.
Как упомянуто, в TLS используется зонд-стилет для обеспечения отслеживания дистального конца катетера 72 в процессе его продвижения через сосудистую сеть. На ФИГ. 5 приведен пример такого зонда-стилета 100, который включает проксимальный конец 100А и дистальный конец 100В. В проксимальный конец зонда-стилета 100А включена рукоятка, из которой дистально направлен мандрен 104. Дистально от мандрена 104 размещен магнитный узел. Магнитный узел включает один или более магнитных элементов 106, размещенных смежно друг с другом вблизи дистального конца 100В зонда-стилета и инкапсулированных трубкой 108. В настоящий вариант осуществления включено множество магнитных элементов 106, причем каждый элемент включает цельный ферромагнитный элемент цилиндрической формы, уложенный концом к другим магнитным элементам. Адгезивный кончик 110 может заполнять дистальный кончик трубки 108 дистально к магнитным элементам 106.
Следует отметить, что в других вариантах осуществления магнитные элементы могут различаться по конфигурации не только по форме, но и по композиции, количеству, размеру, магнитному типу и положению в дистальном сегменте зонда-стилета. Например, в одном варианте осуществления множество ферромагнитных магнитных элементов заменено на электромагнитный узел, такой как электромагнитная катушка, который создает магнитное поле для обнаружения датчиком. Другой пример узла, который можно применять в настоящем изобретении, может быть приведен в патенте США №5,099,845, озаглавленном «Средства определения местоположения медицинского инструмента», который полностью включен в настоящий документ путем ссылки. Другие примеры зондов-стилетов, включающих магнитные элементы, которые можно использовать в функции TLS, описаны в публикации заявки на патент США №2007/0049846, поданной 23 августа 2006 г., озаглавленной «Устройства и способы производства зондов-стилетов», которая полностью включена в настоящий документ путем ссылки. Таким образом, в вариантах осуществления настоящего изобретения также предусмотрены данные и другие вариации. Следует понимать, что в настоящем документе термин «зонд-стилет» может включать любое из различных устройств, предназначенных для съемного размещения внутри просвета катетера для обеспечения ассистирования при размещении дистального конца катетера в желательном месте внутри сосудистой сети пациента.
На ФИГ. 2 показано размещение зонда-стилета 100 по существу внутри просвета в катетере 72 таким образом, что его проксимальная часть проходит проксимально из просвета катетера через муфту 74А и выходит через одну из выбранных удлиненных ножек 74В. При таком размещении внутри просвета катетера дистальный конец 100В зонда-стилета 100 по существу совпадает с дистальным концом катетера 76А, так что обнаружение TLS дистального конца зонда-стилета соответственно указывает на местоположение дистального конца катетера.
При работе в режиме TLS система 10 использует датчик TLS 50 для обнаружения магнитного поля, генерируемого магнитными элементами 106 зонда-стилета 100. Как показано на ФИГ. 2, в процессе введения катетера датчик TLS 50 размещают на груди пациента. Датчик TLS 50 размещают на груди пациента в заданном месте, например, применяя внешние ориентиры на теле, для обеспечения обнаружения магнитного поля магнитных элементов 106 зонда-стилета, размещенных в катетере 72, как описано выше, в процессе прохождения катетера через сосудистую сеть пациента. И опять, поскольку положение конца магнитных элементов 106 магнитного узла зонда-стилета совпадает с дистальным концом 76А катетера 72 (ФИГ. 2), обнаружение датчиком TLS 50 магнитного поля магнитных элементов дает врачу информацию о положении и ориентации дистального конца катетера в процессе его проведения.
Если описывать более подробно, датчик TLS 50 функционально соединен с пультом управления 20 системы 10 посредством одного или более портов 52, как показано на ФИГ. 1. Следует отметить, что также, без ограничений, возможно применение других схем соединения датчика TLS и пульта управления системой. Как только что было описано, магнитные элементы 106 используются в зонде-стилете 100 для обеспечения возможности наблюдать положение дистального конца катетера 76А (ФИГ. 2) относительно датчика TLS 50, размещенного на груди пациента. Обнаружение датчиком TLS 50 магнитных элементов зонда-стилета 106 графически показано на дисплее 30 пульта управления 20 в режиме TLS. Таким образом, размещающий катетер врач может по существу определять местоположение дистального конца катетера 76А внутри сосудистой сети пациента относительно датчика TLS 50 и обнаруживать случаи неправильного положения катетера, такие как продвижение катетера вдоль нежелательной вены.
На ФИГ. 6 и 7А-7Е показаны примеры пиктограмм, которые могут применяться на дисплее пульта управления 30 для отображения обнаружения датчиком TLS 50 магнитных элементов 106 зонда-стилета. В частности, на ФИГ. 6 показана пиктограмма 114, которая отображает дистальную часть зонда-стилета 100, включая магнитные элементы 106, обнаруженные датчиком TLS 50, когда магнитные элементы расположены под датчиком TLS. Поскольку дистальный конец зонда-стилета 100В по существу совпадает с дистальным концом 76А катетера 72, пиктограмма указывает на положение и ориентацию дистального конца катетера. На ФИГ. 7А-7Е показаны различные пиктограммы, которые могут быть отображены на дисплее пульта управления 30, когда магнитные элементы 106 зонда-стилета 100 не расположены непосредственно под частью датчика TLS 50, но тем не менее обнаруживаются рядом. Пиктограммы могут включать пиктограммы-половины 114А и пиктограммы-четверти 114В, которые отображаются в соответствии с положением магнитного узла зонда-стилета, т.е. магнитных элементов 106 в настоящем варианте осуществления, относительно датчика TLS 50.
На ФИГ. 8А-8С показаны мгновенные снимки с дисплея 30 системы 10 при нахождении в режиме TLS, на которых показано, как отображается магнитный узел зонда-стилета 100. На мгновенном снимке 118, изображенном на ФИГ. 8А, показано типичное изображение 120 датчика TLS 50. На мгновенном снимке дисплея 118 также дана другая информация, включая индикатор шкалы глубины 124, информационные указатели статуса/действия 126 и пиктограммы 128, соответствующие кнопочному интерфейсу 32, предусмотренному на пульте управления 20 (ФИГ. 8С). Хотя пиктограммы 128 в настоящем варианте осуществления представляют собой просто индикаторы для направления пользователя при определении назначения соответствующих кнопок кнопочного интерфейса 32, в другом варианте осуществления дисплей может быть выполнен сенсорным, так что сами пиктограммы могут выполнять функции кнопочных интерфейсов и могут изменяться в соответствии с текущим режимом работы системы.
На исходных стадиях продвижения катетера через сосудистую сеть пациента после введения в нее дистальный конец 76А катетера 72, с которым по существу совпадает дистальный конец зонда-стилета 100В, находится относительно удаленно от датчика TLS 50. Поэтому мгновенный снимок дисплея будет указывать «нет сигнала», указывая на то, что магнитное поле от магнитного узла зонда-стилета не было обнаружено. На ФИГ. 8В магнитный узел вблизи дистального конца зонда-стилета 100В продвинулся достаточно близко к датчику TLS 50 для его обнаружения таким образом, но еще не прошел под датчик. На это указывает пиктограмма-половина 114А, показанная слева от изображения датчика 120, представляющего расположение магнитного узла зонда-стилета справа от датчика TLS 50, если смотреть от пациента.
На ФИГ. 8С магнитный узел вблизи дистального конца зонда-стилета 100В был продвинут под датчик TLS 50, так что датчик TLS обнаруживает его положение и ориентацию относительно датчика TLS. На это указывает пиктограмма 114 на изображении датчика 120. Следует отметить, что пиктограммы кнопок 128 дают указания на действия, которые можно выполнить путем нажатия на соответствующие кнопки кнопочного интерфейса пульта управления 32. Поэтому пиктограммы кнопок 128 могут изменяться в соответствии с текущей функцией системы 10, таким образом обеспечивая гибкость применения кнопочного интерфейса 32. Дополнительно следует отметить, что, поскольку кнопочная панель 82 зонда 40 (ФИГ. 3А, 3В) включает кнопки 84, дублирующие несколько кнопок кнопочного интерфейса 32, пиктограммы кнопок 128 на дисплее 30 обеспечивают врачу направление для управления системой 10 с помощью кнопок зонда 84, при этом он остается в стерильном поле. Например, если врачу нужно выйти из режима TLS и вернуться в режим УЗИ (ультразвук), можно вдавить соответствующую кнопку управления 84 на кнопочной панели зонда 82 и немедленно вызвать режим УЗИ, при этом дисплей 30 обновится для вывода визуальной информации, необходимой для функциональности УЗИ, например, как показано на ФИГ. 4. Это достигается без необходимости для врача выходить за пределы стерильного поля.
Со ссылкой на ФИГ. 9 и 10 дано описание интегрированной системы размещения катетера 10 в соответствии с другим примером осуществления. Как и ранее, интегрированная система 10 включает пульт управления 20, дисплей 30, зонд 40 для функциональности УЗИ и датчик TLS 50 для функциональности определения местоположения кончика, как описано выше. Следует отметить, что система 10, показанная на ФИГ. 9 и 10, во многих отношениях аналогична системе, показанной на ФИГ. 1 и 2. Поэтому ниже описаны только выбранные отличия. Система 10, изображенная на ФИГ. 9 и 10, включает дополнительную функциональность, причем можно обнаружить близость дистального кончика катетера 76А относительно синоатриального (SA) или другого излучающего электрические импульсы узла сердца пациента 70, таким образом обеспечивая улучшенные возможности точного размещения дистального кончика катетера в желательном месте вблизи узла. Данная третья функция системы 10, также называемая в настоящем документе функцией «ЭКГ» или «подтверждение кончика на основе ЭКГ», обеспечивает возможность обнаружения сигналов ЭКГ от синоатриального узла для размещения дистального кончика катетера в желательном месте внутри сосудистой сети пациента. Следует отметить, что функции УЗИ, TLS и ЭКГ в настоящей системе 10 гармонично скомбинированы и могут использоваться в комплексе или по отдельности для обеспечения ассистирования при размещении катетера.
На ФИГ. 9 и 10 показано добавление к системе 10 зонда-стилета 130, выполненного в соответствии с настоящим вариантом осуществления. Если описывать вкратце, зонд-стилет катетера 130 заранее съемно размещен внутри просвета катетера 72, вводимого в пациента 70 через место введения 73. Зонд-стилет 130, в дополнение к встроенному в него магнитному узлу для функции TLS на магнитной основе, включает узел датчика ЭКГ вблизи его дистального конца, включая часть, конец которой совпадает с дистальным концом кончика катетера, для регистрации сигналов ЭКГ, генерируемых синоатриальным узлом. В отличие от предыдущего варианта осуществления, зонд-стилет 130 включает кабель-трос 134, направленный из его проксимального конца, который функционально соединен с датчиком TLS 50. Как дополнительно будет описано более подробно, кабель-трос зонда 134 позволяет передавать сигналы ЭКГ, обнаруженные узлом датчика ЭКГ, предусмотренным на дистальной части зонда-стилета 130, на датчик TLS 50 в процессе подтверждения местоположения кончика катетера в рамках функции подтверждения кончика на основе сигнала ЭКГ. Пары опорных и заземляющих проводов/проводов электрокардиографа 158 прикреплены к телу пациента 70 и функционально прикреплены к датчику TLS 50 для обеспечения фильтрации системой интенсивной электрической активности, не связанной с электрической активностью синоатриального узла сердца, таким образом обеспечивая функциональность подтверждения кончика на основе ЭКГ. Вместе с опорным сигналом и сигналом земли, принимаемыми от пар проводов/электродов электрокардиографа 158, размещенных на коже пациента, регистрируемые узлом датчика ЭКГ зонда-стилета сигналы ЭКГ принимаются датчиком TLS 50, расположенным на груди пациента (ФИГ. 10). Датчик TLS 50 и/или процессор пульта управления 22 может обработать данные сигналов ЭКГ для формирования электрокардиограммы на дисплее 30, как будет описано. В случае если данные сигналов ЭКГ обрабатываются датчиком TLS 50, в него включен процессор для выполнения предполагаемой функциональности. Если данные сигналов ЭКГ обрабатываются пультом управления 20, для обработки данных в пульте управления можно использовать процессор 22, контроллер 24 или другой процессор.
Таким образом, по мере продвижения через сосудистую сеть пациента катетер 72, оснащенный зондом-стилетом 130, как описано выше, может продвинуться под датчик TLS 50, который расположен на груди пациента, как показано на ФИГ. 10. Это позволяет датчику TLS 50 обнаруживать положение магнитного узла зонда-стилета 130, конец которого по существу совпадает с дистальным кончиком 76А катетера, размещенного внутри сосудистой сети пациента. Обнаружение датчиком TLS 50 магнитного узла зонда-стилета показано на дисплее 30 в режиме ЭКГ. В режиме ЭКГ на дисплее 30 дополнительно показана электрокардиограмма, формируемая в результате электрической активности сердца пациента, обнаруженной узлом датчика ЭКГ зонда-стилета 130. Если описывать более подробно, электрическая активность ЭКГ синоатриального узла, включая зубец Ρ кардиограммы, обнаруживается узлом датчика ЭКГ зонда-стилета (описан ниже) и передается на датчик TLS 50 и пульт управления 20. Затем электрическая активность ЭКГ обрабатывается для отображения на дисплее 30. После этого размещающий катетер врач может наблюдать данные ЭКГ для определения оптимального размещения дистального кончика 76А катетера 72, например, вблизи синоатриального узла в одном варианте осуществления. В одном варианте осуществления пульт управления 20 включает электронные компоненты, такие как процессор 22 (ФИГ. 9), необходимые для приема и обработки сигналов, обнаруженных узлом датчика ЭКГ зонда-стилета. В другом варианте осуществления датчик TLS 50 может включать необходимые электронные компоненты, обрабатывающие сигналы ЭКГ.
Как уже было описано, дисплей 30 применяется для отображения информации для врача во время процедуры размещения катетера. Содержимое дисплея 30 изменяется в соответствии с текущим режимом работы системы размещения катетера: УЗИ, TLS или ЭКГ. Врач может немедленно вызвать любой из трех режимов на дисплей 30, а в некоторых случаях информация из множества режимов, таких как TLS и ЭКГ, может отображаться одновременно. В одном варианте осуществления, как и ранее, текущий режим работы системы управляется кнопками управления 84, предусмотренными на портативном зонде 40, таким образом для врача устраняется необходимость выходить за пределы стерильного поля (например, для касания кнопочного интерфейса 32 пульта управления 20) для изменения режимов. Таким образом, в настоящем варианте осуществления зонд 40 также используется для управления всей или частью функциональности системы 10, связанной с ЭКГ. Следует отметить, что для управления функциональностью системы также можно применять кнопочный интерфейс 32 или другие конфигурации устройств ввода. Кроме того, в дополнение к визуальному отображению 30 в системе также может использоваться звуковое оповещение, такое как гудки, тональные сигналы и т.д., для помощи врачу в процессе размещения катетера.
Обратимся к ФИГ. 11-12Е для описания различных деталей одного варианта осуществления зонда-стилета 130, который съемно загружен в катетер 72 и используется в процессе введения для расположения дистального кончика 76А катетера в желательном положении внутри сосудистой сети пациента. Как показано, удаленный из катетера зонд-стилет 130 образует проксимальный конец 130А и дистальный конец 130В. На проксимальном конце зонда-стилета 130А предусмотрен соединитель 132, и кабель-трос 134 направлен дистально из соединителя и прикрепляется к рукоятке 136. Из рукоятки 136 дистально направлен мандрен 138. В одном варианте осуществления зонд-стилет 130 предварительно загружен внутрь просвета катетера 72 таким образом, что дистальный конец 130В находится по существу на одном уровне или совпадает с отверстием катетера на его дистальном конце 76А (ФИГ. 10), и таким образом, что проксимальная часть мандрена 138, рукоятка 136 и кабель-трос 134 направлены проксимально из одной из выбранных удлиненных трубок 74В. Следует отметить, что, хотя в настоящем документе описан зонд-стилет, в других вариантах осуществления принципы описанного в настоящем документе варианта осуществления могут быть реализованы на основе направителя или другого устройства направления катетера.
Мандрен 138 образует удлиненную форму и образован из материала, подходящего для зонда-стилета, включая нержавеющую сталь или материал с памятью формы, такой как, в одном варианте осуществления, никель-титановый сплав, широко известный как «нитинол». Хотя это не показано, производство мандрена 138 из нитинола в одном варианте осуществления позволяет части мандрена, соответствующей дистальному сегменту зонда-стилета, иметь предварительно заданную изогнутую конфигурацию с переведением дистальной части катетера 72 в аналогичную изогнутую конфигурацию. В других вариантах осуществления предварительное формование мандрена не предусмотрено. Дополнительно конструкция из нитинола придает мандрену 138 способность передавать крутящее усилие, что позволяет манипулировать дистальным сегментом зонда-стилета 130, размещенного внутри просвета катетера 72, что, в свою очередь, позволяет провести дистальную часть катетера через сосудистую сеть в процессе введения катетера.
Для обеспечения введения/удаления зонда-стилета из катетера 72 предусмотрена рукоятка 136. В тех вариантах осуществления, в которых мандрен 138 зонда-стилета может передавать крутящее усилие, рукоятка 136 дополнительно позволяет вращать мандрен внутри просвета катетера 72 для обеспечения ассистирования при проведении дистальной части катетера через сосудистую сеть пациента 70.
Рукоятка 136 прикреплена к дистальному концу кабель-троса 134. В настоящем варианте осуществления кабель-трос 134 представляет собой гибкий экранированный кабель, вмещающий один или более проводящих проводов, электрически соединенных как с мандреном 138, который выполняет функцию указанного выше узла датчика ЭКГ, так и с соединителем кабель-троса 132. Поэтому кабель-трос 134 обеспечивает проводящий путь от дистальной части мандрена 138 через соединитель кабель-троса 132 на проксимальном конце 13 OA зонда-стилета 130. Как будет пояснено, соединитель кабель-троса 132 предназначен для функционального соединения с датчиком TLS 50 на груди пациента для помощи при проведении дистального кончика катетера 76А в желательное место внутри сосудистой сети пациента.
Как показано на ФИГ. 12B-12D, дистальная часть мандрена 138 постепенно сужается или уменьшается в диаметре дистально от точки соединения 142. На часть мандрена с уменьшенным диаметром надвинута гильза 140. Хотя в данном случае гильза имеет относительно больший диаметр, в другом варианте осуществления гильза может по размеру по существу соответствовать диаметру проксимальной части мандрена зонда-стилета. Зонд-стилет 130 дополнительно включает магнитный узел, размещенный вблизи его дистального конца 130В, для применения в режиме TLS. Магнитный узел в показанном варианте осуществления включает множество магнитных элементов 144, вложенных между внешней поверхностью части мандрена 138 с уменьшенным диаметром и внутренней поверхностью гильзы 140 вблизи дистального конца зонда-стилета 130В. В настоящем варианте осуществления магнитные элементы 144 включают 20 ферромагнитных магнитов цельной цилиндрической формы, уложенных концами способом, аналогичным зонду-стилету 100, изображенному на ФИГ. 2. Однако в других вариантах осуществления магнитный (-е) элемент (-ы) может (могут) отличаться от данной конфигурации не только по форме, но и по композиции, количеству, размеру, магнитному типу и положению в зонде-стилете. Например, в одном варианте осуществления множество магнитов магнитного узла заменено на электромагнитную катушку, которая генерирует магнитное поле для обнаружения датчиком TLS. Таким образом, в вариантах осуществления настоящего изобретения также предусмотрены данные и другие вариации.
Магнитные элементы 144 используются в дистальной части зонда-стилета 130 для обеспечения возможности наблюдать положение дистального конца зонда-стилета 130В относительно датчика TLS 50, размещенного на груди пациента. Как было упомянуто, датчик TLS 50 выполнен с возможностью обнаруживать магнитное поле магнитных элементов 144 по мере продвижения зонда-стилета с катетером 72 через сосудистую сеть пациента. Таким образом, размещающий катетер 72 врач может по существу обнаруживать местоположение дистального конца катетера 76А внутри сосудистой сети пациента и обнаруживать случаи неправильного положения катетера, например, такого как продвижение катетера вдоль нежелательной вены.
В соответствии с одним вариантом осуществления зонд-стилет 130 дополнительно включает вышеупомянутый узел датчика ЭКГ. Узел датчика ЭКГ позволяет использовать зонд-стилет 130, размещенный в процессе введения в просвете катетера 72, для детекции интраатриального сигнала ЭКГ, генерируемого синоатриальным или другим узлом сердца пациента, таким образом позволяя проводить дистальный кончик 76А катетера 72 в заданное местоположение внутри сосудистой сети вблизи сердца пациента. Таким образом, узел датчика ЭКГ служит в качестве помощника при подтверждении надлежащего размещения дистального кончика катетера 76А.
В варианте осуществления, показанном на ФИГ. 11-12Е, узел датчика ЭКГ включает дистальную часть мандрена 138, размещенную вблизи дистального конца 130В зонда-стилета. Мандрен 138, будучи электропроводным, позволяет обнаруживать сигналы ЭКГ своим дистальным концом и передавать их проксимально вдоль мандрена. Дистальная часть гильзы 140, смежная с дистальным концом мандрена 138, заполнена проводящим материалом 146, таким как проводящая эпоксидная смола, с образованием электропроводной связи с дистальным концом мандрена. Это, в свою очередь, увеличивает проводящую поверхность дистального конца 130В зонда-стилета 130 с улучшением его способности обнаруживать сигналы ЭКГ.
До размещения катетера зонд-стилет 130 загружают в просвет катетера 72. Следует отметить, что зонд-стилет 130 может быть предварительно загружен в просвет катетера производителем или может быть загружен в катетер врачом до введения катетера. Зонд-стилет 130 размещают внутри просвета катетера так, что дистальный конец 130В зонда-стилета 130 по существу совпадает с дистальным кончиком 76А катетера 72, таким образом размещая дистальные кончики обоих из зонда-стилета и катетера по существу в выравнивании друг с другом. Совпадение концов катетера 72 и зонда-стилета 130 позволяет использовать магнитный узел с датчиком TLS 50 в режиме TLS для отслеживания положения дистального кончика катетера 76А по мере его продвижения внутри сосудистой сети пациента, как было описано. Однако следует отметить, что для обеспечения функциональности подтверждения кончика системы 10 дистальный конец 130В зонда-стилета 130 необязательно должен совпадать с дистальным концом катетера 76А. Вместо этого требуется только создание проводящего пути между сосудистой сетью и узлом датчика ЭКГ, в данном случае мандрена 138, так чтобы можно было обнаруживать электрические импульсы от синоатриального узла или другого узла сердца пациента. Такой проводящий путь в одном варианте осуществления может включать различные компоненты, включая физиологический раствор, кровь и т.д.
В одном варианте осуществления после введения катетера 72 в сосудистую сеть пациента через место введения 73 (ФИГ. 10) можно использовать режим TLS системы 10, как описано выше, для продвижения дистального кончика катетера 76А к предполагаемому для него месту назначения вблизи синоатриального узла. При приближении к области сердца систему 10 можно переключить в режим ЭКГ для обеспечения обнаружения сигналов ЭКГ, получаемых от синоатриального узла. По мере продвижения катетера с загруженным зондом-стилетом к сердцу пациента электропроводный узел датчика ЭКГ, включая дистальный конец мандрена 138 и проводящий материал 146, начинает обнаруживать электрические импульсы, генерируемые синоатриальным узлом. Таким образом, узел датчика ЭКГ служит в качестве электрода для детекции сигналов ЭКГ. Удлиненный мандрен 138, проксимальный к дистальному концу мандрена, служит в качестве проводящего пути для передачи электрических импульсов, формируемых синоатриальным узлом и принимаемых узлом датчика ЭКГ, в кабель-трос 134.
Кабель-трос 134 передает сигналы ЭКГ на датчик TLS 50, временно размещенный на груди пациента. Кабель-трос 134 функционально соединен с датчиком TLS 50 посредством соединителя кабель-троса 132 или другой подходящей прямой или непрямой соединительной конфигурации. Как описано, после этого сигналы ЭКГ можно обработать и вывести на дисплей системы 30 (ФИГ. 9, 10). Контроль сигнала ЭКГ, принимаемого датчиком TLS 50 и выводимого на дисплей 30, позволяет врачу наблюдать и анализировать изменения сигнала по мере продвижения дистального кончика 76А катетера к синоатриальному узлу. Когда принятый сигнал ЭКГ совпадет с желательным профилем, врач может определить, что дистальный кончик 76А катетера достиг желательного положения относительно синоатриального узла. Как упомянуто, в одном варианте осуществления такое желательное положение находится в пределах нижней 1/3 (одной третьей) части ВПВ.
Узел датчика ЭКГ и магнитный узел могут работать совместно для помощи врачу при размещении катетера внутри сосудистой сети. По существу магнитный узел зонда-стилета 130 обеспечивает ассистирование врачу по существу при проведении по сосудистой сети от исходного введения катетера с размещением дистального конца 76А катетера 72 в общей области сердца пациента. Затем можно использовать узел датчика ЭКГ для направления дистального конца 76А катетера в желательное местоположение внутри ВПВ путем предоставления врачу возможности наблюдать за изменениями сигналов ЭКГ, генерируемых сердцем, по мере приближения узла датчика ЭКГ зонда-стилета к синоатриальному узлу. И снова, при наблюдении подходящего профиля сигнала ЭКГ врач может определить, что дистальные концы как зонда-стилета 130, так и катетера 72 достигли желательного местоположения относительно сердца пациента. После расположения в желательном местоположении катетер 72 можно закрепить на месте и удалить зонд-стилет 130 из просвета катетера. Следует отметить, что зонд-стилет может иметь одну из различных конфигураций помимо явно описанной в настоящем документе. В одном варианте осуществления зонд-стилет может прикрепляться непосредственно к пульту управления вместо непрямого прикрепления посредством датчика TLS. В другом варианте осуществления структура зонда-стилета 130, которая обеспечивает его функциональность в режимах TLS и ЭКГ, может быть интегрирована в структуру самого катетера. Например, магнитный узел и/или узел датчика ЭКГ в одном варианте осуществления можно встроить в стенку катетера.
На ФИГ. 13А-15 описаны различные детали, связанные с передачей данных сигналов ЭКГ из кабель-троса зонда-стилета 134 на датчик TLS 50, расположенный на груди пациента, в соответствии с настоящим вариантом осуществления. В частности, данный вариант осуществления связан с передачей данных сигналов ЭКГ из стерильного поля, окружающего катетер 72 и место введения 73, которое включает зонд-стилет 130 и кабель-трос 134, в нестерильное поле, такое как грудь пациента, на которой расположен датчик TLS. Такая передача не должна пересекать стерильное поле, чтобы не нарушать его стерильность. Большая часть стерильного поля образована стерильной салфеткой, которая расположена поверх пациента 70 во время процедуры введения катетера: области выше салфетки являются стерильными, а области ниже нее (за исключением места введения и непосредственно окружающей его области) являются нестерильными. Как будет показано, представленное ниже описание включает по меньшей мере первый узел связи, связанный с зондом-стилетом 130, и второй узел связи, связанный с датчиком TLS 50, которые функционально соединены друг с другом с обеспечением передачи между ними данных сигнала ЭКГ.
Один вариант осуществления, направленный на передачу данных сигналов ЭКГ из стерильного поля в нестерильное поле без нарушения стерильности первого, показан на ФИГ. 13А-15, на которых показана реализация типа «через салфетку», также называемая реализацией типа «акулий плавник». В частности, на ФИГ. 14А показан вышеописанный датчик TLS 50 для размещения на груди пациента во время процедуры введения катетера. Датчик TLS 50 включает на своей верхней поверхности основание соединителя 152, образующее канал 152А, в котором размещены три электрических контакта основания 154. Пластинчатый соединитель 156, также показанный на ФИГ. 13A-13D, имеет размер, позволяющий скользящим образом принимать его в канал 152А основания соединителя 152, как показано на ФИГ. 14В и 15. Из пластинчатого соединителя 156 проходят две пары проводов/электродов электрокардиографа 158 для размещения на плече и торсе или в других подходящих внешних местах на теле пациента. Прокалывающий салфетку соединитель кабель-троса 132 выполнен с возможностью скользящим образом сопрягаться с частью пластинчатого соединителя 156, как будет дополнительно описано ниже, для замыкания проводящего пути от зонда-стилета 120, через стерильное поле и к датчику TLS 50.
На ФИГ. 13A-13D показаны дополнительные аспекты пластинчатого соединителя 156. В частности пластинчатый соединитель 156 образует нижнюю цилиндрическую часть 160, размер которой позволяет принимать ее в канал 152А основания соединителя 152 (ФИГ. 14В, 15). На заднем конце верхней цилиндрической части 166 предусмотрено отверстие 162, окруженное центрирующим конусом 164. Верхняя цилиндрическая часть 166 имеет размер, позволяющий принимать соединитель кабель-троса 132 зонда-стилета 130 (ФИГ. 14С, 15) таким образом, чтобы штыревой контакт 170, направленный в канал 172 соединителя кабель-троса 132 (ФИГ. 15), направлялся центрирующим отверстием до его посадки внутрь отверстия 162 пластинчатого соединителя 156, таким образом взаимно соединяя соединитель кабель-троса и пластинчатый соединитель. На пластинчатом соединителе 156 может быть предусмотрен зацепляющий элемент, такой как зацепляющий элемент 169, показанный на ФИГ. 13С и 13D, для зацепления с соответствующим элементом на соединителе кабель-троса 132 для помощи в поддержании сопряжения между двумя компонентами.
На ФИГ. 13D показано, что пластинчатый соединитель 156 включает множество электрических контактов 168. В настоящий вариант осуществления включены три контакта 168: два самых передних контакта, каждый из которых электрически соединяется с терминальным концом одного из проводов электрокардиографа 158, и задний контакт, который проходит в аксиальную окрестность отверстия 162 с созданием электрического соединения со штыревым контактом 170 соединителя кабель-троса 132, когда последний сопряжен с пластинчатым соединителем 156 (ФИГ. 15). Нижняя часть каждого контакта 168 пластинчатого соединителя 156 расположена для электрического соединения с соответствующим одним из контактов основания 154 основания соединителя 152 датчика TLS.
На ФИГ. 14В показана первая стадия соединения, причем пластинчатый соединитель 156 съемно сопряжен с основанием соединителя 152 датчика TLS путем скользящего зацепления нижней цилиндрической части 160 пластинчатого соединителя с каналом основания соединителя 152А. Данное зацепление электрически соединяет контакты основания соединителя 154 с соответствующими контактами пластины 168.
На ФИГ. 14С показана вторая стадия соединения, причем соединитель кабель-троса 132 съемно сопряжен с пластинчатым соединителем 156 путем скользящего зацепления канала соединителя кабель-троса 172 с верхней цилиндрической частью 166 пластинчатого соединителя. Данное зацепление электрически соединяет штыревой контакт 170 соединителя кабель-троса с задним контактом 168 пластинчатого соединителя 156, как лучше всего показано на ФИГ. 15. В настоящем варианте осуществления горизонтальное скользящее перемещение соединителя кабель-троса 132 относительно пластинчатого соединителя 156 происходит в том же направлении зацепления, что и при скользящем сопряжении пластинчатого соединителя с каналом основания соединителя датчика 152А (ФИГ. 14В). В одном варианте осуществления один или оба из зонда-стилета 130/соединителя кабель-троса 132 и пластинчатого соединителя 156 являются одноразовыми. Кроме того, в одном варианте осуществления соединитель кабель-троса может быть сопряжен с пластинчатым соединителем после сопряжения пластинчатого соединителя с датчиком TLS, тогда как в другом варианте осуществления сначала могут быть сопряжены соединитель кабель-троса с пластинчатым соединителем через хирургическую салфетку, а затем - пластинчатый соединитель с датчиком TLS.
В схеме соединения, показанной на ФИГ. 14С, зонд-стилет 130 функционально соединен с датчиком TLS 50 посредством соединителя кабель-троса 132, таким образом позволяя узлу датчика ЭКГ зонда-стилета передавать сигналы ЭКГ на датчик TLS. Кроме того, пары проводов/электродов электрокардиографа 158 функционально соединены с датчиком TLS 50. Таким образом, в одном варианте осуществления соединитель кабель-троса 132 называют первым узлом связи для зонда-стилета 130, а пластинчатый соединитель 156 называют вторым узлом связи для датчика TLS 50.
Следует отметить, что для создания функциональной связи между зондом-стилетом и датчиком TLS можно использовать и другие соединительные схемы и структуры. Например, в соединителе кабель-троса для прокалывания салфетки можно применять рассекающий контакт вместо штыревого контакта. Или пластинчатый соединитель может быть выполнен заодно с датчиком TLS. Таким образом, эти и другие конфигурации входят в объем вариантов осуществления настоящего описания.
Как показано на ФИГ. 15, стерильная салфетка 174, применяемая в процессе размещения катетера для создания стерильного поля, вложена между взаимным соединением соединителя кабель-троса 132 и пластинчатого соединителя 156. Как только что было описано, соединитель кабель-троса 132 включает штыревой контакт 170, который выполнен с возможностью прокалывать салфетку 174 при сопряжении двух компонентов. Такое прокалывание образует небольшое отверстие, или перфорацию, 175 в стерильной салфетке 174, которое занято штыревым контактом 170, таким образом сводя к минимуму размер перфорации салфетки штыревым контактом. Более того, посадка соединителя кабель-троса 132 и пластинчатого соединителя 156 такова, что перфорация в стерильной салфетке, выполненная путем прокалывания штыревым контактом 170, окружена каналом соединителя кабель-троса 172, таким образом сохраняя стерильность салфетки и не допуская образования разрыва в салфетке, который мог бы нарушить созданное таким образом стерильное поле. Канал соединителя кабель-троса 172 выполнен так, чтобы складывать стерильную салфетку 174 вниз до ее прокалывания штыревым контактом 170, так что штыревой контакт не прокалывает салфетку до тех пор, пока она не будет размещена вблизи отверстия 162 пластинчатого соединителя 156. В данном случае следует отметить, что соединитель кабель-троса 132 и пластинчатый соединитель 156 выполнены так, чтобы облегчить выравнивание между ними вслепую через непрозрачную стерильную салфетку 174, т.е. посредством визуализации обоих компонентов врачом без пальпации.
Дополнительно следует отметить, что, как показано на ФИГ. 15, контакты пластины 168 пластинчатого соединителя 156 выполнены с возможностью сопряжения с контактами основания датчика 154 так, чтобы содействовать удержанию пластинчатого соединителя в зацеплении с каналом основания датчика 152А. Это, в свою очередь, уменьшает потребность в дополнительном устройстве для закрепления пластинчатого соединителя 156 на датчике TLS 50.
На ФИГ. 16 показана типичная электрокардиограмма 176, включающая зубец Ρ и комплекс QRS. По существу амплитуда зубца Ρ изменяется в зависимости от расстояния узла датчика ЭКГ до синоатриального узла, который генерирует сигнал 176. Врач может применять данную связь для определения того, что кончик катетера надлежащим образом расположен вблизи сердца. Например, в одной реализации кончик катетера желательно размещен в пределах нижней 1/3 (одной третьей) части верхней полой вены, как было описано. Данные ЭКГ, обнаруженные узлом датчика ЭКГ зонда-стилета 130, применяются для воспроизведения сигналов, таких как сигнал 176, для отображения на дисплее 30 системы 10 в режиме ЭКГ.
Обратимся к ФИГ. 17 для описания аспектов отображения данных сигнала ЭКГ на дисплее 30, когда система 10 находится в режиме ЭКГ, дополнительно описанной выше третьей функции, в соответствии с одним вариантом осуществления. Мгновенный снимок 178 дисплея 30 включает элементы функции TLS, включая репрезентативное изображение 120 датчика TLS 50 и пиктограмму 114, соответствующую положению дистального конца зонда-стилета 130 в процессе проведения через сосудистую сеть пациента. Мгновенный снимок 178 дополнительно включает окно 180, в котором отображается текущая электрокардиограмма, снимаемая узлом датчика ЭКГ зонда-стилета 130 и обрабатываемая системой 10. Окно 180 по мере обнаружения новых сигналов постоянно обновляется.
Окно 182 включает последовательное отображение самых последних обнаруженных электрокардиограмм и включает индикатор обновления 182А, который перемещается латерально для обновления сигналов по мере их обнаружения. Окно 184А применяется для отображения электрокардиограммы на исходном уровне, снятой до приведения узла датчика ЭКГ в близость к синоатриальному узлу, с целью сравнения для оказания помощи врачу при определении достижения кончиком катетера желательного положения. В окнах 184В и 184С можно вывести выбранные пользователем обнаруженные электрокардиограммы при нажатии пользователем заданной кнопки на зонде 40 или кнопочном интерфейсе пульта управления 32. Сигналы в окнах 184В и 184С сохраняются до их перезаписи новыми сигналами в результате выбора пользователем путем нажатия кнопки или через другое устройство ввода. Как и в предыдущих режимах, на дисплее 30 предусмотрены шкала глубины 124, информационные указатели статуса/действия 126 и пиктограммы кнопок 128. На дисплее 30 также предусмотрен индикатор соединения 186, который указывает на то, что пары проводов/электродов электрокардиографа 158 функционально соединены с датчиком TLS 50.
Таким образом, как показано выше, на дисплее 30 в одном варианте осуществления на одном экране одновременно отображаются элементы функций TLS и ЭКГ, таким образом предоставляя врачу достаточно данных для ассистирования при размещении дистального конца катетера в желательном положении. Дополнительно следует отметить, что в одном варианте осуществления система 10 позволяет сохранить, распечатать или другим образом сохранить отпечаток мгновенного снимка экрана или выбранные данные ЭКГ или TLS для обеспечения документирования надлежащего размещения катетера.
Хотя описанные в настоящем документе варианты осуществления относятся к конкретной конфигурации катетера, такой как ПВЦК или ЦБК, такие варианты осуществления приведены только для иллюстрации. Соответственно, принципы настоящего изобретения могут распространяться на катетеры множества разных конфигураций и конструкций.
II. Ассистируемое направление иглы/медицинского компонента
Описанные в настоящем документе варианты осуществления настоящего изобретения по существу относятся к системе направления для определения местоположения и направления иглы или другого медицинского компонента в процессе процедуры с ультразвуковым контролем или другой подходящей процедуры, например, для получения доступа с помощью иглы к подкожному сосуду пациента. В одном варианте осуществления система направления позволяет в реальном времени наложить положение, ориентацию и продвижение иглы поверх ультразвукового изображения сосуда, таким образом позволяя врачу точно направлять иглу в предполагаемую цель. Более того, в одном варианте осуществления система направления отслеживает положение иглы по пяти степеням свободы: пространственные координаты х, у и z, наклон иглы по вертикали и отклонение иглы по горизонтали. Такое отслеживание позволяет направлять и размещать иглу с относительно высокой точностью.
На ФИГ. 18 и 19 показаны различные компоненты системы направления иглы с ультразвуковым контролем («система»), по существу обозначенной 1110, выполненной в соответствии с одним вариантом осуществления настоящего изобретения. Как показано, система 1110 по существу включает часть ультразвуковой («УЗИ») визуализации, включающую пульт управления 1120, дисплей 1130 и зонд 1140, каждый из которых дополнительно подробно описан ниже. Следует отметить, что в одном варианте осуществления система 1110 в отношении некоторых компонентов имеет сходство с системой 10, показанной на ФИГ. 1. Однако следует отметить, что часть ультразвуковой визуализации может быть выполнена одним из различных способов в дополнение к показанным и описанным в настоящем документе.
Часть ультразвуковой визуализации системы 1110 используется для визуализации целевой внутренней части тела пациента до чрескожного введения иглы или другого устройства для получения доступа к цели. Как описано ниже, в одном варианте осуществления введение иглы выполняют до последующего введения катетера в вену или другую часть сосудистой сети пациента. Однако следует понимать, что введение иглы в организм пациента может выполняться для различных медицинских целей.
На ФИГ. 19 показано общее соотношение вышеописанных компонентов к пациенту 1170 во время процедуры, имеющей конечной целью размещение катетера 1172 в сосудистой сети пациента через место введения на коже 1173, в соответствии с одним вариантом осуществления. На ФИГ. 19 показано, что катетер 1172 по существу включает проксимальную часть 1174, которая остается внешней по отношению к пациенту, и дистальную часть 1176, которая после завершения процедуры размещения находится внутри сосудистой сети пациента. Систему 1110 используют для окончательного расположения дистального кончика 1176А катетера 1172 в желательном положении внутри сосудистой сети пациента. В одном варианте осуществления желательное положение для дистального кончика катетера 1176А находится вблизи сердца пациента, например, в нижней 1/3 (одной третьей) части верхней полой вены (ВПВ). Конечно, систему 1110 можно использовать для размещения дистального кончика катетера в других местах.
Проксимальная часть катетера 1174 дополнительно включает муфту 1174А, которая обеспечивает сообщение по текучей среде между одним или более просветами катетера 1172 и одной или более удлинительных ножек 1174В, проходящих проксимально из муфты. Как упомянуто, размещение иглы в сосудистой сети пациента в месте введения 1173, как правило, выполняют до введения катетера, хотя следует понимать, что можно использовать и другие способы размещения. Дополнительно следует понимать, что приведенное выше описание представляет собой лишь один пример применения системы 1110. В действительности ее можно использовать для различных сфер применения, таких как размещение игл при подготовке к введению катетера, как описано выше, введение иглы для других применений, или для введения других медицинских компонентов в организм пациента, включая рентгеноконтрастные или ультразвуковые маркеры, интродьюсеры для биопсии, компоненты для абляции, компоненты для сканирования мочевого пузыря, фильтры для полой вены и т.д.
Если описывать более подробно, в пульте управления 1120 вмещено множество компонентов системы 1110, и следует понимать, что пульт управления может принимать одну из множества форм. В пульт управления 1120 включен процессор 1122, включающий энергонезависимое запоминающее устройство, такое как, например, ЭСППЗУ, для управления функционированием системы и исполнения различных алгоритмов в процессе эксплуатации системы 1110, таким образом выступающий в роли управляющего процессора. В пульт управления 1120 также включен интерфейс цифрового/аналогового контроллера 1124, который находится в связи как с процессором 1122, так и с другими компонентами системы для управления взаимодействием между зондом 1140 и другими компонентами системы.
Система 1110 дополнительно включает порты 1152 для соединения с дополнительными компонентами, такими как необязательные компоненты 1154, включая принтер, устройство хранения данных, клавиатуру и т.д. В одном варианте осуществления порты представляют собой порты USB, хотя для данного и других интерфейсных соединений, описанных в настоящем документе, можно применять порты другого типа или комбинацию типов портов. В пульт управления 1120 включен разъем питания 1156 для обеспечения функционального соединения с внешним источником питания 1158. Также можно использовать внутреннюю батарею 1160 либо с внешним источником питания, либо вместо него. В интерфейс цифрового/аналогового контроллера 1124 пульта управления включена схема управления питанием 1159 для управления использованием и распределением питания.
Дисплей 1130 в настоящем варианте осуществления интегрирован в пульт управления 1120 и применяется для отображения информации врачу во время процедуры размещения, такой как ультразвуковое изображение целевой внутренней части тела, достигнутой зондом 1140. В другом варианте осуществления дисплей может быть отделен от пульта управления. В одном варианте осуществления для мгновенного вызова врачом желательного режима на дисплей 1130 для ассистирования в процедуре размещения можно применять кнопочный интерфейс пульта управления 1132 и кнопки управления 1184 (ФИГ. 19), предусмотренные на зонде 1140. В одном варианте осуществления дисплей 1130 представляет собой ЖК-устройство.
На ФИГ. 19 дополнительно показана игла 1200, применяемая для получения исходного доступа к сосудистой сети пациента через место введения 1173. Как будет более подробно описано ниже, игла 1200 выполнена с возможностью взаимодействия с системой 1110 для обеспечения для системы возможности обнаруживать положение, ориентацию и продвижение иглы во время процедуры размещения с ультразвуковым контролем.
На ФИГ. 20 показаны элементы зонда 1140 в соответствии с одним вариантом осуществления. Зонд 1140 используют в связи с визуализацией сосуда, такого как вена, с ультразвуковым контролем во время подготовки к введению иглы 1200 и/или катетера 1172 в сосудистую сеть. Такая визуализация обеспечивает в реальном времени ультразвуковой контроль направления и помогает снизить осложнения, обычно связанные с таким введением, включая непреднамеренный прокол артерии, гематому, пневмоторакс и т.д.
Портативный зонд 1140 включает головку 1180, в которую вмещен набор пьезоэлектрических элементов для генерации ультразвуковых импульсов и приема их эха после отражения организмом пациента, когда головка размещена на коже пациента вблизи планируемого места введения 1173 (ФИГ. 19). Зонд 1140 дополнительно включает множество кнопок управления 1184 (ФИГ. 19) для управления системой, таким образом для врача устраняется необходимость выходить из стерильного поля, которое создано вокруг места введения у пациента до установки места введения, для управления системой 1110.
Поэтому в одном варианте осуществления врач использует часть ультразвуковой визуализации системы 1110 для определения подходящего места введения и получения доступа в сосудистую сеть, такого как с помощью иглы 1200, до введения катетера 1172 для его окончательного продвижения через сосудистую сеть в предполагаемое место назначения.
На ФИГ. 18 показано, что зонд 1140 дополнительно включает контроллер кнопок и памяти 1142 для управления эксплуатацией кнопок и зонда. В одном варианте осуществления контроллер кнопок и памяти 1142 может включать энергонезависимое запоминающее устройство, такое как ЭСППЗУ. Контроллер кнопок и памяти 1142 находится в функциональной связи с интерфейсом зонда 1144 пульта управления 1120, который включает компонент ввода/вывода 1144А для пьезоэлементов для взаимодействия с набором пьезоэлектрических элементов зонда, и компонент ввода/вывода 1144В для кнопок и памяти для взаимодействия с контроллером кнопок и памяти 1142.
Как показано на ФИГ. 20, зонд 1140 включает совокупность датчиков 1190 для детекции положения, ориентации и перемещения иглы 1200 во время процедур с ультразвуковой визуализацией, таких как описанные выше. Как будет более подробно дополнительно описано ниже, совокупность датчиков включает множество магнитных датчиков 1192, встроенных внутрь оболочки зонда. Датчики 1192 выполнены с возможностью обнаруживать магнитное поле, связанное с иглой 1200, и позволяют системе 1110 отслеживать иглу. Хотя датчики 1192 в данном случае выполнены как магнитные датчики, следует понимать, что они могут представлять собой датчики других типов и конфигураций, как будет описано. Кроме того, хотя на ФИГ. 20 датчики 1192 совокупности датчиков 1190 показаны включенными в зонд 1140, они могут быть включены в компонент, отдельный от зонда, такой как отдельное портативное устройство. В настоящем варианте осуществления датчики 1192 размещены в пленарной конфигурации под верхней поверхностью 1182 зонда 1140, хотя следует понимать, что датчики могут быть размещены в других конфигурациях, таких как дугообразная или полукруглая конфигурация.
В настоящем варианте осуществления каждый из датчиков 1192 включает три ортогональные сенсорные катушки для обеспечения обнаружения магнитного поля в трех пространственных измерениях. Такие трехмерные (3D) магнитные датчики можно приобрести, например, в компании Honeywell Sensing and Control, г. Морристаун, штат Нью-Джерси, США. Дополнительно датчики 1192 настоящего варианта осуществления выполнены в виде датчиков Холла, хотя можно использовать магнитные датчики других типов. Дополнительно вместо 3D датчиков можно использовать множество одномерных магнитных датчиков, которые можно предусмотреть и разместить желательным образом для обеспечения обнаружения в одном, двух или трех измерениях.
В настоящем варианте осуществления в совокупность датчиков 1190 включены пять датчиков 1192 с обеспечением возможности обнаруживать не только положение иглы 1200 в трех пространственных измерениях (т.е. координатном пространстве Χ, Y, Z), но также наклон по вертикали и отклонение по горизонтали самой иглы. Следует отметить, что в одном варианте осуществления ортогональные сенсорные компоненты двух или более датчиков 1192 позволяют определить наклон по вертикали и отклонение по горизонтали магнитного элемента 1210 и, таким образом, иглы 1200.
В других вариантах осуществления в совокупности датчиков можно использовать меньшее или большее число датчиков. По существу следует понимать, что количество, размер, тип и размещение датчиков совокупности датчиков могут отличаться от явно представленных в настоящем документе.
На ФИГ. 21А и 21В показаны детали одного примера иглы 1200, который можно применять в связи с системой направления 1110 для получения доступа к целевой внутренней части тела пациента, как показано на ФИГ. 19, в соответствии с одним вариантом осуществления. В частности, игла 1200 включает пустотелую канюлю 1202, которая образует проксимальный конец 1202А и дистальный конец 1202В. Муфта 1204 прикреплена к проксимальному концу 1202А канюли 1202 и включает открытый конец 1204А, который в настоящем варианте осуществления выполнен в виде соединителя для соединения с различными устройствами. Фактически открытый конец 1204А муфты 1204 находится в связи с пустотелой канюлей 1202, так что через муфту в канюлю можно провести направитель, зонд-стилет или другой компонент.
Как показано на ФИГ. 21А и 21В, в муфту 1204 включен магнитный элемент 1210. Как лучше всего показано на ФИГ. 21В, магнитный элемент 1210 в настоящем варианте осуществления представляет собой постоянный магнит, например, включающий ферромагнитное вещество, и имеет кольцевую форму с образованием отверстия 1212, которое выровнено с пустотелой канюлей 1202. Магнитный элемент 1210 с такой конфигурацией генерирует магнитное поле, которое детектируется совокупностью датчиков 1190 ультразвукового зонда 1140 с обеспечением отслеживания положения, ориентации и перемещения иглы 1200 системой 1110, как дополнительно описано ниже.
Следует понимать, что в других вариантах осуществления с иглой 1200 или другим медицинским компонентом можно использовать магнитные элементы других типов, размеров и в другом количестве для обеспечения возможности их отслеживания настоящей системой направления.
На ФИГ. 22А и 22В показан ультразвуковой зонд 1140 системы 1110 и игла 1200, расположенная и готовая к введению через поверхность кожи 1220 пациента для получения доступа к целевой внутренней части тела. В частности, зонд 1140 показан с его головкой 1180, размещенной вплотную к коже пациента и генерирующей ультразвуковой пучок 1222 с ультразвуковой визуализацией части сосуда 1226 под поверхностью кожи пациента 1220. Ультразвуковое изображение сосуда 1226 может отображаться на дисплее 1130 системы 1110 (ФИГ. 19).
Как упомянуто выше, система 1110 в настоящем варианте осуществления выполнена с возможностью обнаруживать положение, ориентацию и перемещение иглы 1200, описанной выше. В частности, совокупность датчиков 1190 зонда 1140 выполнена с возможностью обнаруживать магнитное поле магнитного элемента 1210, включенного в иглу 1200. Каждый из датчиков 1192 совокупности датчиков 1190 выполнен с возможностью пространственно обнаруживать магнитный элемент 1210 в трехмерном пространстве. Таким образом, в процессе эксплуатации системы 1110 данные о величине магнитного поля магнитного элемента иглы 1210, регистрируемого каждым из датчиков 1192, передается в процессор, такой как процессор 1122 пульта управления 1120 (ФИГ. 18), который в реальном времени рассчитывает положение и/или ориентацию магнитного элемента 1210.
Как показано более конкретно на ФИГ. 22А и 22В, система 1110 может определять положение магнитного элемента 1210 в координатном пространстве Χ, Y и Ζ относительно совокупности датчиков 1190, применяя данные о величине магнитного поля, регистрируемого датчиками 1192. Более того, на ФИГ. 22А показано, что также можно определять наклон по вертикали магнитного элемента 1210, а на ФИГ. 22В показано, что можно определять отклонение магнитного элемента по горизонтали. Вычисления, необходимые для такого положения/ориентации, может выполнять подходящая схема зонда 1140, пульта управления 1120 или другого компонента системы. В одном варианте осуществления магнитный элемент 210 можно отслеживать с применением идей одного или более из следующих патентов США: 5,775,322; 5,879,297; 6,129,668; 6,216,028 и 6,263,230. Содержание вышеупомянутых патентов США полностью включено в настоящий документ путем ссылки.
Представленная выше информация о положении и ориентации, определенная системой 1110, вместе с известными или введенными в систему данными о длине канюли 1202 и положении магнитного элемента 1210 относительно дистального кончика иглы, позволяет системе точно определять местоположение и ориентацию всей длины иглы 1200 относительно совокупности датчиков 1190. Необязательно расстояние между магнитным элементом 1210 и дистальным кончиком иглы известно или введено в систему 1110. Это, в свою очередь, позволяет системе 1110 накладывать изображение иглы 1200 на изображение, полученное ультразвуковым пучком 1222 зонда 1140. На ФИГ. 23А и 23В показаны примеры такого наложения иглы на ультразвуковое изображение. Более конкретно, на каждой из ФИГ. 23А и 23В показан мгновенный снимок 1230, который может, например, отображаться на дисплее 1130 (ФИГ. 19). На ФИГ. 23А показано ультразвуковое изображение 1232, включающее изображение поверхности кожи пациента 1220 и подкожного сосуда 1226. Ультразвуковое изображение 1232 соответствует изображению, полученному, например, с помощью ультразвукового пучка 1222, показанного на ФИГ. 22А и 22В.
На мгновенном снимке 1230 дополнительно показано изображение иглы 1234, представляющее положение и ориентацию действительной иглы 1200, определенные системой 1110, как описано выше. Поскольку система может определять местоположение и ориентацию иглы 1200 относительно совокупности датчиков 1190, система может точно определять положение и ориентацию иглы 1200 относительно ультразвукового изображения 1232 и накладывать их поверх для отображения в виде изображения иглы 1234 на дисплее 1130. Координация позиционирования изображения иглы 1234 на ультразвуковом изображении 1232 выполняется с помощью подходящих алгоритмов, исполняемых процессором 1122 или другим подходящим компонентом системы 1110.
Датчики 1192 выполнены с возможностью непрерывно обнаруживать магнитное поле магнитного элемента 1210 иглы 1200 в процессе эксплуатации системы 1110. Это позволяет системе 1110 непрерывно обновлять положение и ориентацию изображения иглы 1234 для отображения на дисплее 1130. Таким образом, продвижение или другое перемещение иглы 1200 отображается в реальном времени на изображении иглы 1234 на дисплее 1130. Следует отметить, что система 1110 может непрерывно обновлять как ультразвуковое изображение 1232, так и изображение иглы 1234 на дисплее 1130 по мере перемещений зонда 1140 и иглы 1200 в ходе процедуры размещения или другой деятельности.
На ФИГ. 23А дополнительно показано, что в одном варианте осуществления система 1110 может отображать планируемую траекторию 1236 в зависимости от текущего положения и ориентации иглы 1200, показанных на изображении иглы 1234. Планируемая траектория 1236 помогает врачу определить, позволит ли текущая ориентация иглы 1200, показанная на изображении иглы 1234 на дисплее 1130, привести ее в желательную целевую внутреннюю часть тела, такую как показанный в данном случае сосуд 1226. И снова по мере изменения ориентации и/или положения изображения иглы 1234 планируемая траектория 1236 соответствующим образом модифицируется системой 1110. Цель 1238, включая точку, в которой планируемая траектория 1236 пересекает плоскость ультразвукового изображения 1232, также может отображаться на дисплее 1130 системой 1110. Как показано на ФИГ. 23А, в настоящем примере цель 1238 размещена внутри сосуда 1226, показанного на ультразвуковом изображении 1232. Следует отметить, что положение цели 1238 на дисплее 1130 также может быть модифицировано по мере регулирования изображения иглы 1200 и/или ультразвукового изображения 1232. Мгновенный снимок 1230 также включает область вероятности 1239, в данном случае показанную прямоугольником, которая указывает на возможные пределы погрешности системы, связанные с длиной иглы, жесткостью и сгибом иглы, величиной поля магнитного элемента, магнитными помехами, возможным несоответствием в выравнивании магнитной оси магнитного элемента с продольной осью иглы, ориентации совокупности датчиков относительно плоскости ультразвуковой визуализации и т.д.
На ФИГ. 23В показано, что в одном варианте осуществления мгновенный снимок 1230 может быть выполнен с возможностью ориентации ультразвукового изображения 1232 и изображения иглы 1234 с получением изображения в трехмерном аспекте. Это позволяет подтвердить угол и ориентацию иглы 1200, показанной на изображении иглы 1234, и сравнить их с предполагаемой целью, визуализированной на ультразвуковом изображении 1232. Следует отметить, что мгновенные снимки 1230 являются лишь примерами возможных представлений, формируемых системой 1110 для отображения. В действительности можно применять и другие визуальные представления. Дополнительно следует отметить, что конкретная визуализируемая область тела также приведена только для примера. Систему можно применять для ультразвуковой визуализации различных частей тела, и она не должна быть ограничена тем, что явно показано на сопроводительных фигурах. Дополнительно система в показанном и описанном в настоящем документе виде может при необходимости входить в качестве компонента в более крупную систему или может быть выполнена как самостоятельное устройство. Кроме того, следует понимать, что в дополнение к визуальному отображению 1130 в системе 1110 также может использоваться звуковая информация, такая как гудки, тональные сигналы и т.д., для ассистирования врачу в процессе позиционирования и введения иглы в организм пациента.
Как упомянуто выше, в одном варианте осуществления системе 1110 необходимо знать полную длину иглы 1200 и местоположение магнитного элемента 1210 на ней для обеспечения точного отображения изображения иглы 1234 и других элементов мгновенных снимков 1230, представленных на ФИГ. 23А и 23В, которые необходимо сделать. Эти и/или другие необходимые параметры можно сообщить системе 1110 различными способами, включая сканирование системой штрихкода, нанесенного на или встроенного в иглу, установку чипа радиочастотной идентификации (RFID) на иглу для сканирования системой, цветовую маркировку иглы, ручной ввод параметров врачом в систему и т.д. Например, на показанной на ФИГ. 33А игле 1200 установлен чип RFTD 1354. Зонд 1140 или другой компонент системы 1110 может включать устройство считывания RFID для считывания информации, занесенной в чип RFID 1354, такой как тип или длина иглы 1200 и т.д. Таким образом, предусмотрены эти и другие средства ввода параметров иглы в систему 1110 или детекции параметров.
В одном варианте осуществления длину иглы (или другой аспект медицинского компонента) можно определить путем измерения зондом/системой характеристики магнитного элемента, такой как величина его поля. Например, в одном варианте осуществления магнитный элемент иглы можно расположить на заданном расстоянии от зонда или в заданном местоположении относительно зонда. При расположенном таким образом магнитном элементе совокупность датчиков зонда обнаруживает и измеряет величину поля магнитного элемента. Система может сравнить измеренную величину поля с хранимым в памяти списком возможных величин поля, соответствующих разным длинам игл. Система может сопоставить две величины поля и определить длину иглы. Затем можно разместить и после этого ввести иглу, как описано в настоящем документе. В другом варианте осуществления вместо стационарного удержания магнитного элемента в заданном местоположении магнитный элемент можно перемещать вокруг зонда, так чтобы зонд произвел множество измерений величины поля. Аспекты, которые можно модифицировать для передачи различных величин поля набору магнитных элементов, включают размер, форму, композицию магнитного элемента и т.д.
Ниже приведена дополнительная информация по применению системы 1110 для направления иглы или другого медицинского устройства в связи с ультразвуковой визуализацией целевой внутренней части тела («целью») пациента в соответствии с одним вариантом осуществления. Содержащую магнитный элемент иглу 1200 располагают на подходящем расстоянии (например, 0,6 метра (два фута) или более) в стороне от ультразвукового зонда 1140, включающего совокупность датчиков 1190, и используют зонд для ультразвуковой визуализации для отображения на дисплее 1130 системы 1110 цели в организме пациента, которую, предположительно, пересечет игла посредством чрескожного введения. Затем запускают калибровку системы 1110, в ходе которой процессор 1122 пульта управления 1120 исполняет алгоритмы для определения исходного уровня любых остаточных магнитных полей вблизи места проведения процедуры. В систему 1110 также вводят полную длину иглы 1200 и/или положение магнитного элемента относительно дистального кончика иглы, используя, например, ввод пользователем, автоматическое определение или другой подходящий способ, как было описано выше.
Затем иглу 1200 вносят в диапазон действия датчиков 1192 совокупности датчиков 1190 зонда 1140. Каждый из датчиков 1192 обнаруживает величину магнитного поля, связанного с магнитным элементом 1210 иглы 1200, и данные передаются на процессор 1122. В одном варианте осуществления такие данные можно хранить в памяти до того момента, пока они не потребуются процессору. По мере того как датчики 1192 обнаруживают магнитное поле, процессор 1122 выполняет подходящие алгоритмы для расчета величины магнитного поля магнитного элемента 1210 иглы 1200 в прогнозируемых точках пространства относительно зонда. Затем процессор 1122 сравнивает действительные данные величины магнитного поля, обнаруженного датчиками 1192, с расчетными значениями величины поля. Следует отметить, что данный процесс дополнительно описан в указанных выше патентах США. Данный процесс можно выполнять итерационно до тех пор, пока рассчитанное значение прогнозируемой точки не совпадут с измеренными данными. При достижении такого совпадения магнитный элемент 1210 позиционно размещен в трехмерном пространстве. Применяя данные величины магнитного поля, обнаруженного датчиками 1192, можно также определить наклон по вертикали и отклонение по горизонтали (т.е. ориентацию) магнитного элемента 1210. Вместе с известной длиной иглы 1200 и положением дистального кончика иглы относительно магнитного элемента это позволяет системе 1110 получить точное представление о положении и ориентации иглы и отобразить ее в виде виртуальной модели, т.е. изображения иглы 1234, на дисплее 1130. Следует отметить, что в одном варианте осуществления прогнозируемые и действительные обнаруженные значения должны совпадать в пределах заданного уровня допуска или достоверности, чтобы система 1110 могла вывести на дисплей отображение иглы.
Отображение виртуального изображения иглы 1234 иглы 1200, как описано выше, в настоящем варианте осуществления выполняется путем наложения изображения иглы на ультразвуковое изображение 1232 дисплея 1130 (ФИГ. 23А, 23В). Подходящие алгоритмы системы 1110, исполняемые процессором 1122 или другим подходящим компонентом, дополнительно позволяют определить планируемую траекторию 1236, цель 1238 и область вероятности 1239 (ФИГ. 23А, 23В) и отобразить их на дисплее 1130 поверх ультразвукового изображения 1232 цели. Вышеуказанный процесс прогнозирования, обнаружения, сравнения и отображения выполняется итерационно для непрерывного отслеживания перемещения иглы 1200 в реальном времени.
В свете указанного выше и со ссылкой на ФИГ. 24 следует понимать, что в одном варианте осуществления способ 1240 направления иглы или другого медицинского компонента включает различные стадии. На стадии 1242 целевая внутренняя часть тела пациента визуализируется системой визуализации, такой как, например, устройство ультразвуковой визуализации.
На стадии 1244 обнаруживаемая характеристика медицинского компонента, такого как игла, регистрируется одним или более датчиками, включенными в систему визуализации. В настоящем варианте осуществления обнаруживаемая характеристика иглы представляет собой магнитное поле магнитного элемента 1210, включенного в иглу 1200, а датчики представляют собой магнитные датчики, включенные в совокупность датчиков 1190, включенную в ультразвуковой зонд 1140.
На стадии 1246 положение медицинского компонента относительно целевой внутренней части тела определяется в по меньшей мере двух пространственных измерениях путем регистрации обнаруживаемой характеристики. Как описано выше, такое определение в настоящем варианте осуществления процессором выполняется процессором 1122 пульта управления 1120.
На стадии 1248 изображение, представляющее положение медицинского компонента, комбинируется с изображением целевой внутренней части тела для отображения на дисплее. Стадия 1250 показывает, что стадии 1244-1248 могут повторяться итерационно для отображения продвижения или другого перемещения медицинского компонента относительно визуализируемой цели, такой как, например, чрескожное введение иглы 1200 к сосуду 1226 (ФИГ. 23А, 23В).
Следует понимать, что процессор 1122 или другой подходящий компонент может рассчитывать дополнительные аспекты, включая область вероятности 1239 и цель 1238 (ФИГ. 23 А, 23В), для отображения на дисплее 1130.
Следует понимать, что в одном варианте осуществления не требуется, чтобы совокупность датчиков была изначально встроена в устройство ультразвуковой визуализации, но она может использоваться с ним другими способами. На ФИГ. 25 показан один пример этого, в котором показан выполненный с возможностью прикрепления модуль датчика 1260, включающий датчики 1192 совокупности датчиков 1190, прикрепленный к ультразвуковому зонду 1140. Такая конфигурация обеспечивает направление иглы, как описано в настоящем документе, в связи со стандартным устройством ультразвуковой визуализации, т.е. устройством, не включающим совокупность датчиков, интегрированную в ультразвуковой зонд, или процессор и алгоритмы, выполненные с возможностью определять местоположение и отслеживать иглу, как описано выше. Поэтому модуль датчика 1260 в одном варианте осуществления включает процессор и алгоритмы, подходящие для определения местоположения и отслеживания иглы или другого медицинского компонента, а также для отображения на дисплее виртуального изображения иглы для наложения на ультразвуковое изображение. В одном варианте осуществления в модуль датчика 1260 может быть включен дисплей модуля 1262 для отображения отслеживания иглы. Таким образом, предусмотрены эти и другие конфигурации системы направления.
На ФИГ. 26 показано, что в одном варианте осуществления можно использовать держатель иглы для удержания и продвижения иглы 1200 во время процедуры ультразвуковой визуализации и направления иглы, выполняемой системой 1110, как описано выше. Как показано, держатель иглы 1270 имеет форму пистолета и включает спусковой механизм 1272 для избирательного продвижения иглы 1200 или другого подходящего медицинского компонента путем перемещения иглы продольно в сторону от цилиндра держателя при нажатии на спусковой механизм. Держатель иглы 1270 с такой конфигурацией облегчает врачу обращение с иглой с помощью одной руки, тогда как вторая рука удерживает ультразвуковой зонд 1140 и выполняет манипуляции с ним. Кроме того, держатель иглы 1270 может обеспечивать ассистирование при перемещении/повороте иглы, например, посредством двигателя, храпового механизма, гидравлических/пневматических ведущих элементов и т.д. Более того, на держателе иглы 1270 может быть предусмотрен элемент циферблата для помощи в определении ориентации дистального кончика иглы 1200 и для облегчения поворота иглы.
В одном варианте осуществления держатель иглы 1270 может быть функционально соединен с системой 1110, так что продвижение с помощью держателя иглы автоматически прекращается, когда дистальный конец 1202В канюли иглы 1202 достигает целевой внутренней части тела или игла пересекает плоскость ультразвуковой визуализации. В другом варианте осуществления магнитный элемент может быть включен в держатель иглы вместо самой иглы. Таким образом, можно определить местоположение иглы, временно закрепленной в держателе иглы, и направить ее системой направления без необходимости в прикреплении магнитного элемента непосредственно к игле.
Следует отметить, что также можно использовать другие конфигурации датчика. В одном варианте осуществления кольцевой датчик может быть выполнен с возможностью принятия канюли иглы через образованное в нем отверстие. При таком размещении магнитный элемент иглы расположен вблизи кольцевого датчика, что позволяет легко обнаруживать магнитный элемент и определять местоположение иглы системой. В одном варианте осуществления кольцевой датчик можно прикрепить к поверхности зонда.
На ФИГ. 27 и 28 показаны компоненты системы направления 1110 в соответствии с другим вариантом осуществления, в котором для обеспечения возможности отслеживания и направления иглы используется оптическое взаимодействие между зондом 1140 и иглой 1200. В частности, зонд 1140 включает оптический источник/источник излучения, такой как светодиод 1280, и фото детектор 1282, расположенный на поверхности зонда. Следует понимать, что источник излучения и детектор могут быть выполнены с возможностью генерировать и обнаруживать световые сигналы различных диапазонов, включая видимый, инфракрасный и т.д.
Муфта иглы 1204 включает отражающую поверхность 1286, способную отражать излучение, генерируемое светодиодом 1280 и падающее на нее. Как показано на ФИГ. 28, испускаемое светодиодом излучение 1280 отражается отражающей поверхностью 1286 иглы 1200, и часть его принимается и регистрируется фотодетектором 1282. Как и в предшествующих вариантах осуществления, процессор 1122 пульта управления системы 1120 можно использовать для приема зарегистрированных данных с фотодетектора 1282 и расчета положения и/или ориентации иглы 1200. Как и ранее, длина иглы 1200 и/или положение отражающей поверхности относительно дистального конца иглы 1200 вводятся в систему 1110 или иным образом обнаруживаются или становятся известны ей. Следует отметить, что отражающая поверхность может быть предусмотрена и в других местах иглы.
В свете указанного выше следует понимать, что в настоящем варианте осуществления обнаруживаемая характеристика иглы 1200 включает отражающую способность отражающей поверхности 1286, в отличие от характеристики магнитного поля магнитного элемента 1210 предшествующих вариантов осуществления, а датчик включает фотодетектор 1282, в отличие от магнитных датчиков 1192 предшествующих вариантов осуществления. Следует понимать, что в одном варианте осуществления вышеописанную конфигурацию можно обратить, и в этом случае оптический источник включен в иглу или медицинский компонент. В этом случае для обеспечения возможности определения местоположения и отслеживания иглы излучение испускается из иглы и обнаруживается фотодетектором 1282, включенным в зонд 1140. В иглу может быть включен источник питания, такой как часовая батарея и т.п., для подачи питания на источник излучения иглы.
По существу следует понимать, что для обеспечения возможности определения местоположения иглы и направления ее к цели внутри тела пациента игла или медицинский компонент может включать одну или более таких или других обнаруживаемых характеристик. Не имеющие ограничительного характера примеры других характерных обнаруживаемых функций включают электромагнитные или радиочастотные (РЧ) характеристики (см., например, ФИГ. 29-30 ниже), а также радиоактивность. В отношении РЧ-функций следует понимать, что в иглу могут быть включены один или более синхронных или асинхронных импульсных радиочастотных источников для обеспечения возможности ее обнаружения подходящим (-и) датчиком (-ами), или же первый РЧ-источник может сочетаться с пассивным магнитом в качестве второго источника.
На ФИГ. 29 и 30 показаны компоненты системы направления в соответствии с одним вариантом осуществления, где для обеспечения возможности определения местоположения и направления иглы используется взаимодействие ЭМ-сигналов между зондом 1140 и иглой 1200. В частности, на ФИГ. 29 игла 1200 включает размещенный в ней зонд-стилет 1298. Зонд-стилет 1298 включает ЭМ-катушку 1290, которая функционально соединена с зондом 1140 через кабель-трос 1292. Таким образом, ЭМ-катушка 1290 может приводиться в действие подходящими компонентами, включенными в зонд 1140 или пульт управления системы 1120, так что ЭМ-катушка излучает ЭМ-сигнал в процессе эксплуатации.
В зонд 1140 включен датчик 1294, подходящий для детекции ЭМ-сигналов, излучаемых ЭМ-катушкой 1290 зонда-стилета 1298. В настоящем варианте осуществления датчик 1294 представляет собой трехосный датчик для детекции соответствующих ортогональных компонент ЭМ-сигнала, хотя также можно использовать другие конфигурации катушки и датчика. Система с такой конфигурацией может определить местоположение и ориентацию иглы 1200 путем триангуляции ЭМ-сигнала или другим подходящим способом и отобразить их на дисплее образом, аналогичным уже описанному выше. Как и в предшествующих вариантах осуществления, процессор 1122 пульта управления системы 1120 (ФИГ. 18) можно использовать для приема зарегистрированных данных с ЭМ-датчика 1294 и расчета положения и/или ориентации иглы 1200. Как и ранее, длина иглы 1200 и/или положение ЭМ-катушки 1290 относительно дистального конца иглы 1200 вводятся в систему или иным образом обнаруживаются или становятся известны ей.
На ФИГ. 30 показан вариант ЭМ-конфигурации, показанной на ФИГ. 29, в котором относительные положения ЭМ-компонентов обращены: ЭМ-катушка 1290 включена в зонд 1140, а ЭМ-датчик 1294 включен в зонд-стилет 1298, размещенный в игле 1200. Следует отметить, что в вариантах осуществления, показанных на ФИГ. 29 и 30, функциональное соединение между ЭМ-катушкой 1290 и ЭМ-датчиком 1294 через кабель-трос 1292 позволяет системе 1110 приводить в действие компоненты, размещенные в зонде-стилете 1298. Это также позволяет обеспечить соответствие конкретной ЭМ-частоты или частот, излучаемых ЭМ-катушкой 1290 и обнаруживаемых ЭМ-датчиком 1294. В одном варианте осуществления можно использовать другой вариант конфигурации, показанной на ФИГ. 29, в которой функциональное соединение ЭМ-катушки и ЭМ-датчика через кабель-трос отсутствует. Вместо этого ЭМ-катушка зонда-стилета работает как отдельный от зонда и его ЭМ-датчика компонент и получает питание от независимого источника питания, такого как батарея. В этом случае зонд/система включает подходящие компоненты обработки сигнала, выполненные с возможностью обнаруживать ЭМ-сигнал, излучаемый ЭМ-катушкой, и обрабатывать его необходимым образом для определения местоположения иглы.
Следует отметить, что ЭМ-катушка и ЭМ-датчики могут быть предусмотрены в местах, отличных от показанных в настоящем документе. Например, ЭМ-катушка может быть предусмотрена на самой игле или на соединителе, который выполнен с возможностью прикрепления к проксимальному концу иглы.
На ФИГ. 31A-31D представлена дополнительная информация об игле 1200, выполненной в соответствии с одним вариантом осуществления, причем игла включает муфту 1304, от которой проходит канюля 1202. Магнитный элемент 1310, в котором образовано отверстие 1312, включен в полость 1314А оболочки 1314. Оболочка 1314 включает резьбу для резьбового зацепления муфты иглы 1304 или другого подходящего компонента иглы или медицинского компонента. Таким образом, магнитный элемент 1310 выполнен с возможностью съемного прикрепления к игле 1200 через оболочку 1314. Таким образом, магнитный элемент 1310 необязательно должен быть постоянно зафиксирован в игле 1200 или включен в нее, но может быть удален с нее, когда направление иглы на магнитной основе более не требуется. Кроме того, это позволяет прикреплять магнитный элемент к иглам многих различных типов и размеров. Следует отметить, что в настоящем варианте осуществления игла 1200 дополнительно включает дистально сдвигаемый компонент обеспечения безопасности иглы 1320 для безопасной изоляции дистального кончика иглы при извлечении иглы из тела пациента. Также следует отметить, что в дополнение к явно показанному и описанному в настоящем документе также можно использовать другие съемные магнитные элементы.
На ФИГ. 32-33В представлены дополнительные примеры иглы 1200, включающей магнитный элемент. На ФИГ. 32 два магнитных элемента 1340 в виде брусков размещены с прохождением ортогонально из муфты 1334 иглы 1200, показывая, что магнитный элемент не обязательно должен быть ориентирован параллельно продольной оси иглы. На ФИГ. 33А-33В в муфту иглы 1344 включены четыре магнитных элемента 1350, показывая, что в иглу может быть включено более одного магнитного элемента. Такую конфигурацию можно использовать, например, когда ограниченное пространство не позволяет применять один магнитный элемент. Следует отметить, что показанные в настоящем документе число, форма и размещение магнитных элементов представляют собой лишь один пример многих возможных конфигураций.
На ФИГ. 34A-34G даны различные примеры конфигураций магнитного элемента 1360, который образует отверстие для принятия через него канюли иглы. Показаны конфигурации с различной формой магнитного элемента 1360, включая квадрат (ФИГ. 34А), шестиугольник (ФИГ. 34В), треугольник (ФИГ. 34С), прямоугольник (ФИГ. 34D), овал (ФИГ. 34Е), восьмиугольник (ФИГ. 34F) и четырехстороннюю пирамиду (ФИГ. 34G). Показанные на сопроводительных фигурах магнитные элементы представляют собой лишь примеры широкого диапазона геометрических и других форм, которые можно применять для образования магнитного элемента. В действительности также предусмотрены другие формы, не показанные явным образом в настоящем документе.
На ФИГ. 35 и 36 показан другой вариант осуществления, в котором имеется зонд-стилет 1390 для съемного введения в пустотелую канюлю 1202 иглы 1200. На дистальном конце зонда-стилета 1390 имеется множество постоянных магнитов 1392, таких как сплошные ферромагниты цилиндрической формы, уложенные концами друг к другу. Как показано на ФИГ. 36, в процессе введения иглы 1200 в организм пациента зонд-стилет 1390 принимается внутрь канюли иглы 1202. В зонде 1140 или вблизи него может иметься кольцевой датчик 1396 или другой подходящий магнитный датчик для обеспечения обнаружения магнитного поля магнитов 1392, таким образом позволяя системе направления обнаруживать положение и ориентацию иглы 1200 и накладывать ее изображение поверх ультразвукового изображения, сформированного зондом 1140 способом, аналогичным описанному выше в связи с ФИГ. 5А-7.
Таким образом, на ФИГ. 35 и 36 показано, что магнитный (-ы) элемент (-ы) может (могут) быть выполнены любым из множества способов. Например, в одном варианте осуществления магнитные элементы могут быть размещены более проксимально вдоль длины зонда-стилета. В другом варианте осуществления сам зонд-стилет может быть намагничен или может быть образован из магнитных материалов. Следует понимать, что зонд-стилет может быть выполнен одним из множества способов, аналогичные примеры которых приведены в патенте США №5,099,845, озаглавленном «Средства определения местоположения медицинского инструмента», и публикации заявки на патент США №2007/0049846, поданной 23 августа 2006 г., озаглавленной «Устройства и способы производства зондов-стилетов», оба из которых полностью включены в настоящий документ путем ссылки. Таким образом, предусмотрены эти и другие варианты.
Следует понимать, что в настоящем документе термин «зонд-стилет» может включать любое из различных устройств, включая направители, выполненные с возможностью съемного размещения внутри просвета иглы для ассистирования при ее размещении в организме пациента. В одном варианте осуществления зонд-стилет может включать острый конец, который проходит дистально за пределы тупого дистального конца канюли иглы с обеспечением возможности введения в организм пациента тупой иглы. Следует отметить, что зонд-стилет в одном варианте осуществления придает игле жесткость со сведением к минимуму ее непреднамеренного изгиба в процессе введения.
На ФИГ. 37 показан другой возможный вариант осуществления, в котором игла 1200 включает кольцевой, или тороидальный, магнит 1400, размещенный дистально к проксимальному концу 1202А канюли иглы 1202. Следует отметить, что в других вариантах осуществления магнит 1400 можно расположить в одном из нескольких положений вдоль длины канюли 1202. Позиционирование магнита 1400 относительно ближе к дистальному кончику иглы ослабляет эффекты, к которым может приводить непреднамеренный изгиб иглы, для обнаружения и отображения положения иглы. В другом варианте осуществления сама игла может быть намагничена. Дополнительно следует отметить, что относительные места датчика и источника (например, магнита) системы можно обратить. Также предусмотрены эти и другие конфигурации. Дополнительно следует отметить, что представленное в настоящем документе описание можно применить к другим функциям визуализации помимо ультразвука, включая МРТ, рентгенографическое исследование и КТ-сканирование и т.д.
На ФИГ. 38 показан датчик деформации 1410, предусмотренный на зонде-стилете, например, таком как зонд-стилет 1390, показанный на ФИГ. 35 и 36. Датчик деформации 1410 может быть функционально соединен с зондом 1140, пультом управления 1120 (ФИГ. 18) или другим компонентом системы 1110 через проводящий путь 1414. Один пример проводящего пути 1414 включает один или более электропроводных проводников, размещенных, например, в зонде-стилете 1390 или вдоль него. При таком соединении датчик деформации 1410 действует как преобразователь и может обеспечивать данные, связанные с изгибом иглы, в которой размещен зонд-стилет 1390, во время процедур введения иглы, поскольку изгиб иглы 1200 будет вызывать аналогичный изгиб зонда-стилета 1390.
Эти данные, регистрируемые посредством изгиба датчика деформации 1410, могут быть переданы на процессор 1122 и обработаны им (ФИГ. 18) или другим подходящим компонентом системы 1110 с включением такого изгиба вместе с обнаружением магнитного элемента датчиками зонда 1192 (ФИГ. 20) в расчет положения иглы 1200, в особенности ее дистального кончика. Это приводит к повышению точности определения местоположения и отображения положения дистального кончика иглы. Фактически на ФИГ. 39А показан изгиб датчика деформации 1410 в одном направлении, вызванный изгибом зонда-стилета 1390, причем на ФИГ. 39В показан изгиб датчика деформации в другом направлении. Таким образом, такой изгиб зонда-стилета обнаруживается датчиком деформации 1410 (посредством изменений электрического сопротивления внутри датчика деформации в одном варианте осуществления) и передается в систему 1110 для применения при расчете положения иглы. Следует отметить, что для измерения изгиба иглы/зонда-стилета можно необязательно применять другие подходящие датчики, включая, например, датчик изгиба 1420, как показано на ФИГ. 40, а также емкостные и волоконно-оптические датчики деформации. Кроме того, в одном варианте осуществления датчик можно поместить непосредственно на иглу/медицинский компонент.
На ФИГ. 41-59 показаны различные варианты осуществления, по существу относящиеся к включению магнитного элемента, такого как постоянный магнит, в иглу, относящийся к игле компонент или другое медицинское устройство. В частности, раскрыты варианты осуществления для снабжения узла иглы магнитным элементом, магнитная ось которого соосно выровнена с продольной осью канюли иглы. Такой снабженный магнитным элементом узел иглы можно отслеживать в пространстве с помощью подходящей системы направления и отслеживания на магнитной основе при введении иглы, например, при подготовке к введению иглы в организм пациента, как уже было описано выше.
На ФИГ. 41А-41С показаны различные детали, относящиеся к узлу иглы 1610, который служит в качестве одного примера медицинского устройства или компонента, который можно направлять с помощью вышеописанной системы направления, в соответствии с одним вариантом осуществления. Как показано, узел иглы 1610 включает пустотелую канюлю 1612 и защитный кожух 1616, размещенный на проксимальном конце канюли. Показаны каретка 1618 и связующий элемент 1620 защитного компонента иглы для размещения внутри защитного кожуха 1616. Проксимальный конец защитного кожуха 1616 закрыт колпачком 1622, а размер защитного кожуха может быть выбран так, чтобы его можно было ввести в муфту иглы 1626 и зафиксировать внутри нее.
Также имеется магнитный элемент 1630, такой как постоянный магнит, размер которого выбран так, что канюля 1612 может проходить через образованное в нем отверстие 1632, и так, что магнитный элемент надежно размещен внутри углубления, образованного в защитном кожухе 1616. Магнитный элемент 1630 с такой конфигурацией в настоящем варианте осуществления имеет цилиндрическую форму с отверстием 1632, образованным вдоль его центральной оси. Дополнительно в соответствии с настоящими вариантами осуществления и как лучше всего показано на ФИГ. 41С, магнитный элемент 1630 ориентирован внутри углубления защитного кожуха 1616 так, что его магнитная ось, которая может не быть выровнена с его центральной осью, соосно выровнена с продольной осью канюли 12. Например, постоянный магнит, выступающий в роли магнитного элемента 1630, показанного на ФИГ. 41А-41С, показан на ФИГ. 41С как наклоненный относительно канюли узла иглы 1612 так, что его магнитная ось по существу соосно выровнена с продольной осью канюли. Такое выравнивание позволяет описанной выше системе направления для введения иглы точно отслеживать дистальный кончик иглы.
Следует отметить, что настоящие варианты осуществления, относящиеся к выравниванию магнитного элемента, хотя они и явно описаны в связи с узлом иглы, показанным на ФИГ. 41А-41С и других сопроводительных фигурах, можно применять с узлами иглы/медицинскими устройствами различных конфигураций, конструкций и т.д. Таким образом, представленное ниже описание не следует рассматривать как имеющее какой-либо ограничительный характер. В частности, магнитный элемент, хотя в настоящем документе он и описан как размещенный в защитном кожухе муфты узла иглы, также можно разместить/расположить другими способами. Дополнительно применяемый в настоящем документе термин «защитный кожух» можно понимать как относящийся к муфте, оболочке или любому другому объекту, в котором или с которым можно разместить магнитный элемент.
В одном варианте осуществления канюля 1612 включает материал с низкой магнитной проницаемостью. Более конкретно, в одном варианте осуществления канюля 1612 включает аустенитный сплав, включающий никель и хром, такой как материал, выведенный на рынок под торговой маркой INCONEL®625, производства компании Special Metals Corporation, г. Нью-Хартфорд, штат Нью-Йорк, США. Такие материалы демонстрируют сниженную тенденцию к временному намагничиванию и притяжению к магнитному материалу, таким образом сохраняя невозмущенным магнитное поле и позволяя получить более точные результаты, когда игла отслеживается с применением системы направления на магнитной основе. Другие возможные материалы включают нержавеющую сталь с низкой магнитной проницаемостью, другие варианты нержавеющей стали и т.д.
В одном варианте осуществления магнитный элемент 1630 представляет собой постоянный магнит, такой как неодим-железо-борный магнит. В одном варианте осуществления такой постоянный магнит может дополнительно включать диспрозий и другие редкоземельные элементы. В одном варианте осуществления постоянный магнит образуют из порошка, который сначала ориентирован в приложенном магнитном поле, затем сжимают под высоким давлением и после этого спекают в печи. Следует понимать, что постоянный магнит может быть образован из других материалов, включая самарий-кобальт, и может быть изготовлен способами, отличными от прессования и спекания порошков. Поэтому следует понимать, что данные в настоящем документе примеры магнитных элементов не считаются ограничивающими. В другом варианте осуществления используется редкоземельный неодимовый магнит N52 MGOe.
Следует отметить, что в одном варианте осуществления игла 10 или другое медицинское устройство, которое необходимо отслеживать описанной в настоящем документе системой направления на магнитной основе, включает чип RFID, который может считываться устройством считывания RFID, включенным в зонд или другой компонент системы направления. Чип RFID иглы может включать информацию об игле, включая название иглы, тип, расстояние от магнитного элемента иглы до дистального кончика иглы, силу и/или размер магнитного элемента и другую полезную информацию. Такая информация может применяться системой направления для корректировки своих рабочих параметров для соответствия типу применяемой иглы. В другом варианте осуществления относящуюся к игле информацию вводят в систему направления вручную. В другом варианте осуществления в игле может быть или иглу может сопровождать штрихкод, который позволяет системе направления определять необходимую информацию в отношении иглы. В одном варианте осуществления система включает участок памяти для хранения базы данных по характеристикам игл, которые могут применяться с системой направления.
На ФИГ. 42 показан постоянный магнит в качестве магнитного элемента 1630, включающий отверстие 1632 и аналогичный магнитному элементу, показанному на ФИГ. 41А-41С. Как показано, магнитный элемент 1630 включает физическую ось, указанную как Р.А., которая проходит через корпус магнитного элемента. Поскольку магнитный элемент 1630 образован в виде цилиндра, физическая ось Р.А. соответствует центральной оси цилиндрического магнитного элемента. Также показана магнитная ось, указанная как М.А., которая проходит через цилиндрический корпус магнитного элемента 1630 под углом относительно физической оси Р.А. и, таким образом, несоосна физической оси.
Поскольку многие постоянные магниты имеют несоосные расходящиеся по углу физические и магнитные оси, как только что было описано, в таких случаях желательно располагать магнит в узле иглы для применения с вышеописанной системой направления для введения иглы так, чтобы ее магнитная ось, но не обязательно ее физическая ось, была по существу соосно выровнена с продольной осью канюли узла иглы, так чтобы система направления для введения иглы могла точно указывать положение дистального кончика иглы, исходя из его обнаружения надлежащим образом ориентированным магнитом. При выполнении этого условия магнитный элемент может быть физически ориентирован под углом относительно канюли иглы в тех случаях, когда магнитный элемент принимает канюлю через образованное в нем отверстие. Данный случай показан на ФИГ. 43, на котором показан магнитный элемент 1630 с канюлей узла иглы 1612, размещенной через отверстие в магнитном элементе 1632, и магнитный элемент наклонен под углом таким образом, что магнитная ось магнитного элемента по существу соосно выровнена с продольной осью канюли. Следует отметить, что отверстие 1632 имеет достаточный диаметр для обеспечения такого ориентирования магнитного элемента 1630 на канюле 1612. Можно выполнить подходящие измерения для определения наличия и величины углового смещения магнитной оси с определением необходимого углового наклона/отклонения для каждого магнитного элемента.
На ФИГ. 44 и 45 показана ориентация магнитного элемента 1630 относительно части узла иглы в соответствии с одним вариантом осуществления. В частности, на ФИГ. 44 показан кондуктор 1640, который включает полость 1642, которая смещена по углу от параллели Ρ на угол θ, как показано. Величина углового смещения θ соответствует отклонению магнитной оси магнитного элемента от его физической оси. В наклоненной полости 1642 размещается муфта узла иглы 1626, включая углубление 1626А. Затем в углубление муфты 1626А вводится магнитный элемент 1630 в направлении, параллельном Р, для его посадки внутри углубления муфты в наклоненной ориентации. Магнитный элемент 1630 фиксируется внутри углубления муфты 1626А в этой ориентации. Позднее, когда проксимальный конец канюли будет принят в углубление муфты 1626А и отверстие магнитного элемента 1630, его продольная ось будет по существу соосно выровнена с магнитной осью магнитного элемента, как и желательно.
Конфигурация кондуктора 1640 на ФИГ. 45 отличается от показанной на ФИГ. 44 тем, что полость 1642 параллельна Р, тогда как магнитный элемент 1630 вводится в углубление муфты 1626А с угловым смещением θ, которое соответствует его углу отклонения магнитной оси от его физической оси. Магнитная ось 1630 может быть зафиксирована внутри углубления муфты 1626А в этой ориентации. Следует отметить, что, хотя на ФИГ. 44 и 45 магнитный элемент показан как вводимый в углубление, образованное непосредственно в муфте узла иглы, он может вводиться таким образом в защитный кожух или другой компонент узла иглы или подходящего медицинского устройства.
На ФИГ. 46 геометрически показана степень возможного углового отклонения между магнитным элементом 1630 от канюли иглы 1612 при принятии канюли через отверстие магнитного элемента 1632. В частности, показано угловое смещение θ отклонения между канюлей 1612 и магнитным элементом 1630 вместе с диаметром θ отверстия 1632. Также показан диаметр канюли иглы nd. Образуется прямоугольный треугольник, включающий угловое смещение θ, длину смежной стороны x, гипотенузу h и противоположную сторону d-y, где у измеряется под углом через канюлю 1612, как показано.
Для нахождения максимального углового смещения, в соответствии с которым магнитный элемент заданного размера можно отклонить с сохранением возможности принятия через него канюли иглы соответствующего размера, можно применять следующие тригонометрические функции:





В одном варианте осуществления угловое смещение θ можно определить, применяя известные значения для d, nd и x для нахождения у и затем подставляя у обратно в уравнения для нахождения θ. Знание максимального углового смещения θ для заданного размера магнитного элемента позволяет определить технические характеристики магнитного элемента, которые определяют максимально возможное расхождение между физической осью и магнитной осью магнитного элемента.
На ФИГ. 47А-47В показаны детали приспособления для введения магнитного элемента 1650 для введения магнитных элементов в защитный кожух 1616 (ФИГ. 41А-41С) в соответствии с одним вариантом осуществления. Приспособление 1650 включает основание 1652, к которому с возможностью скольжения прикреплена скользящая часть 1654 на двух скользящих направляющих 1656. В основании 1652 образованы две полости 1658. В каждую полость 1658 включена направляющая 1660, размер которой позволяет принимать на нее защитный кожух 1616. Из каждой направляющей 1660 вверх проходит направляющий штифт 1662.
Скользящая часть 1654 включает две проходящих вниз наклоненных направляющих для введения 1664, каждая из которых выполнена с возможностью высвобождаемого удержания соответствующего одного из магнитных элементов 1630. На каждой наклоненной направляющей для введения 1664 предусмотрены прорези 1666 для обеспечения ориентации магнитных элементов. Направляющие для введения 1664 наклонены для соответствия углу отклонения магнитной оси размещенного на них магнитного элемента от его физической оси. В одном варианте осуществления известно, что отклонение между физической осью и магнитной осью магнитного элемента 1630 позволяет обеспечить его соответствие с надлежащим образом наклоненной направляющей для введения 1664. Действительно, в одном варианте осуществления в партии магнитных элементов можно выполнить исходную сортировку магнитных элементов по величине отклонения между физической и магнитной осями. В одном варианте осуществления угол направляющих для введения 1664 можно скорректировать для согласования с отклонением магнитной оси в магнитных элементах. При необходимости прорези 1666 можно применять в качестве эталонных элементов для надлежащей ориентации магнитных элементов на наклоненных направляющих для введения 1664.
На ФИГ. 48А и 48В показано применение приспособления для введения 1650 при введении магнитных элементов 1630 в соответствующие защитные кожухи 1616. Как показано, после установки магнитных элементов 1630 на каждой наклоненной направляющей для введения 1664 скользящую часть 1654 опускают посредством скользящих направляющих 1656 до тех пор, пока магнитный элемент не будет принят в углубление защитного кожуха 1616. Поскольку защитный кожух удерживается направляющими 1660 в вертикально расположенной ориентации, магнитный элемент вводится в углубление защитного кожуха в желательной наклоненной ориентации, так что его магнитная ось надлежащим образом выровнена с защитным кожухом и продольной осью канюли, которая впоследствии будет прикреплена к защитному кожуху. Для фиксации магнитного элемента 1630 на месте в его наклоненной ориентации можно применять адгезив или другую фиксирующую среду. Затем скользящую часть 1654 можно приподнять с высвобождением наклоненной направляющей для введения 1664 из зацепления с магнитным элементом 1630 и защитным кожухом 1616. Следует отметить, что в одном варианте осуществления число направляющих для введения и полостей на приспособлении для введения можно варьировать с одновременным проведением процедуры введения для желательного числа магнитных элементов.
На ФИГ. 49-51 показан способ по существу выравнивания магнитной оси магнитного элемента с его физической осью в соответствии с одним вариантом осуществления. На ФИГ. 49 показан просверленный цилиндрический магнитный шток 1670, включающий магнитный материал. Вдоль длины штока 1670 имеется указатель ориентации 1672. Шток 1670 нарезан ортогонально его центральной оси вдоль линий разреза 1674 для получения множества магнитных элементов 1630, включающих отверстие 1632, один из которых показан на ФИГ. 50. Показана магнитная ось М.А. магнитного элемента 1630.
Как показано на ФИГ. 51, два магнитных элемента 1630, вырезанных из штока 1670, поворачивают на 180 градусов относительно друг друга так, чтобы их соответствующие указатели ориентации 1672 были расположены напротив друг друга. Два магнитных элемента сопряжены друг с другом, например, посредством адгезива. Такой поворот приводит к размещению магнитных осей М.А. магнитных элементов 1630 напротив друг друга так, что противолежащие компоненты их магнитных осей взаимно компенсируют друг друга. Это приводит к получению результирующей магнитной оси для соединенных магнитных элементов 1630, которая существу соосно выровнена с центральной физической осью Р.А. соединенных магнитных элементов, как и желательно. Следует отметить, что для достижения описанных в настоящем документе результатов можно соединять более двух магнитных элементов и что можно применять и другие штоки/массы симметричной формы. Также в одном варианте осуществления можно вышеописанным образом группировать для соединения вместе дискретные магнитные элементы, которые не были нарезаны из одного и того же бруска магнитного материала, но имеют аналогичные угловые отклонения магнитной оси от физической оси.
На ФИГ. 52А-54С показаны различные детали, относящиеся к узлу выравнивающей катушки 1680, которую можно применять для ориентации магнитных элементов для включения в узел иглы, такой как узел иглы 1610, показанный на ФИГ. 41А-41С, в соответствии с одним вариантом осуществления. Как показано на ФИГ. 52А и 52В, узел выравнивающей катушки 1680 включает основание 1682 (ФИГ. 52В), на котором в уложенной конфигурации прикреплены друг к другу множество компонентов, включая держатель 1684, нижний каркас катушки 1686, центральную пластину 1688, верхний каркас катушки 1690 и верхнюю пластину 1692. Эти компоненты в одном варианте осуществления включают немагнитный проводящий материал, такой как алюминий и/или латунь, и при взаимодействии образуют центральное отверстие 1694 узла 1680.
Каждый из нижнего каркаса катушки 1686 и верхнего каркаса катушки 1690 включает обмотки 1696, которые при подаче электрического тока генерируют электромагнитное поле вокруг узла выравнивающей катушки 1680. В одном варианте осуществления обмотки 1696 закреплены на месте адгезивом, таким как эпоксидная смола. Генерируемое обмотками 1696 электромагнитное поле по существу параллельно продольной оси центрального отверстия 1694 внутри объема центрального отверстия. Таким образом, работа узла выравнивающей катушки 1680 в некоторых отношениях аналогична работе одноосной катушки Гельмгольца. Верхний каркас катушки 1690 дополнительно образует множество отверстий доступа 1698 для получения доступа к центральному отверстию 1694 снаружи узла выравнивающей катушки 1680.
На ФИГ. 52А, 53А и 53В показано, что узел выравнивающей катушки 1680 дополнительно включает приспособление 1700 для удержания защитного кожуха 1616 от узла иглы 1610 (ФИГ. 41А-41С) и для введения защитного кожуха в центральное отверстие 1694 узла и его извлечения из него посредством ручных манипуляций с приспособлением, хотя также предусмотрен автоматический процесс. Как показано, приспособление 1700 включает рукоятку 1702 и две удлиненных направляющих, которые проходят от рукоятки к основанию 1706. На ФИГ. 54А показано, что основание 1706, в свою очередь, включает направляющую 1708 для съемного удержания защитного кожуха 1616, как показано на ФИГ. 53А, и направляющий штифт 1710, проходящий вверх от направляющей. На ФИГ. 53В показан способ, которым приспособление 1700 устанавливается в центральное отверстие 1694 узла выравнивающей катушки 1680, причем центральная пластина 1688 и верхний каркас катушки 1690 для ясности удалены. Следует отметить, что конкретная конфигурация узла выравнивающей катушки 1680 и приспособления 1700 может быть модифицирована для вмещения компонентов узла иглы разных размеров, конструкций и т.д. В одном варианте осуществления приспособление 1700 включает подходящий немагнитный проводящий материал, такой как алюминий или латунь.
На ФИГ. 54В показан способ размещения защитного кожуха 1616 на направляющей 1708 основания 1706. При таком расположении направляющий штифт 1710 проходит через канал канюли 1714 (ФИГ. 54С) в углубление 1712, образованное защитным кожухом 1616 для помощи при окончательном размещении магнитного элемента в углублении. Следует отметить, что защитный кожух 1616 включает дополнительные элементы, включая ориентирующие элементы 1718, для обеспечения ориентации защитного кожуха желательным образом в узле выравнивающей катушки и/или узле иглы, и отверстие для введения адгезива для обеспечения впрыска адгезива в углубление защитного кожуха 1712 до или после выравнивания магнитной оси магнитного элемента.
Во время процедуры размещения магнитного элемента, такого как магнитный элемент 1630, показанный на ФИГ. 41А и 41В, в защитном кожухе 1616 с применением узла выравнивающей катушки 1680 защитный кожух сначала помещают на направляющую 1708 приспособления 1700, как показано на ФИГ. 54В. Магнитный элемент 1630 помещают в углубление защитного кожуха 1712 и оставляют в нем незакрепленным. Следует отметить, что углубление защитного кожуха 1712 включает вогнуто закругленный элемент 1699 на нижней поверхности углубления для облегчения перемещения/ориентации магнитного элемента 1630 в процессе описанной в данном случае процедуры выравнивания.
После размещения защитного кожуха на направляющей 1708 основания приспособления 1706 приспособление 1700 вручную вводят в центральное отверстие 1694 узла выравнивающей катушки 1680, аналогично тому, как показано на ФИГ. 53В. Затем в обмотки 1696 узла выравнивающей катушки 1680 подают ток, что генерирует однородное магнитное поле внутри центрального отверстия 1694 узла выравнивающей катушки 1680. Направление однородного магнитного поля параллельно продольной оси центрального отверстия 1694, и это направление совпадает с продольной осью канюли иглы 1612 (ФИГ. 41А и 41В), которую проведут через защитный кожух при завершении сборки, и это направление представляет собой желательное направление для выравнивания с ним магнитной оси магнитного элемента. Данное поле приводит к тому, что магнитный элемент 1630 ориентируется таким образом, что его магнитная ось выравнивается с однородным магнитным полем, присутствующим в центральном отверстии 1694. Такое выравнивание может приводить к наклону магнитного элемента относительно направляющего штифта 1710, причем направляющий штифт присутствует для сохранения способности канюли иглы 1612 (ФИГ. 41А и 41В) проходить через отверстие 1632 магнитного элемента в узле иглы в сборе. Следует отметить наклон магнитного элемента 1630 внутри углубления защитного кожуха 1712 на ФИГ. 54С. И снова закругленный элемент 1699 внутри углубления 1712 помогает ориентировать магнитный элемент 1630 однородным магнитным полем, присутствующим в центральном отверстии 1694.
Кроме того, в настоящем варианте осуществления в узел выравнивающей катушки 1680 включен вибрирующий компонент, такой как вибрационный двигатель 1683, который включает выступ 1683А, входящий в контакт с частью основания приспособления 1706, как показано на ФИГ. 52В, для обеспечения вибрации приспособления 1700 и размещенного на нем защитного кожуха 1616. Это позволяет магнитному элементу 1630 более свободно ориентироваться по однородному магнитному полю при размещении внутри углубления 1712 и предотвращает физическое застревание магнитного элемента внутри углубления.
После надлежащего выравнивания магнитной оси магнитного элемента 1630 можно выполнить отверждение УФ-активируемой эпоксидной смолы быстрого отверждения, которая была ранее введена в углубление защитного кожуха 1712 через отверстие для введения адгезива 1716, образованное в оболочке защитного кожуха 1616, путем облучения источником УФ-излучения, введенного в область защитного кожуха внутри центрального отверстия 1694. Следует отметить, что доступ к отверстию для введения адгезива 1716 защитного кожуха 1616 можно получить через отверстия доступа 1698 верхнего каркаса катушки 1690 узла выравнивающей катушки 1680. Применение такой светоотверждаемой эпоксидной смолы обеспечивает относительно быструю фиксацию магнитного элемента 1630 внутри защитного кожуха 1616 в магнитно выровненной ориентации.
После или во время закрепления магнитного элемента 1630 внутри углубления 1712 защитного кожуха 1616 канюлю 1612 можно провести через защитный кожух, который можно соединить с муфтой иглы 1626, и можно встроить остальные образующие узел иглы 1610 элементы, как показано на ФИГ. 41А-41С. В результате вышеописанного процесса выравнивания магнитная ось магнитного элемента 1630 будет по существу соосно выровнена с продольной осью канюли иглы 1612, как и желательно. Следует отметить, что конфигурация защитного кожуха, иглы, муфты, магнитного элемента и т.д. может отличаться от показанной и описанной в настоящем документе, оставаясь при этом в рамках принципов настоящего описания. Например, магнитный элемент может быть встроен непосредственно в муфту или канюлю иглы без наличия защитного кожуха. Также следует отметить, что возможны и другие конфигурации обмоток, включая квадратные обмотки и обмотки другой формы, три или более обмотки вместо двух и другие конфигурации, которые могут генерировать однородное магнитное поле в центральном отверстии узла выравнивающей катушки.
На ФИГ. 55А-55С показано выравнивание магнитного элемента 1630 в соответствии с одним вариантом осуществления, причем на магнитный элемент помещен указатель ориентации 1724 для указания ориентации его магнитной оси М.А. Колпачок 1720 также включает указатель ориентации 1724 и дополнительно образует углубление 1722, в котором должен быть закреплен магнитный элемент 1630. Выравнивание двух указателей ориентации 1724 может позволить наблюдателю подходящим образом проводить манипуляции с магнитным элементом 1630 внутри углубления 1722 перед фиксацией элемента на месте так, чтобы его магнитная ось была направлена в желательном направлении.
На ФИГ. 56-58 показаны дополнительные элементы для обеспечения выполнения манипуляций с магнитным элементом 1630 внутри углубления колпачка 1720, где колпачок является типичным образцом различных углублений для приема магнитного элемента в узел иглы или другого подходящего медицинского устройства для применения с системой отслеживания иглы, такой как дополнительно описана выше. На ФИГ. 56 магнитный элемент 1630 включает заостренный конец, который обеспечивает более простые манипуляции с элементом во время процедур по ориентированию его магнитной оси. Аналогичным образом, на ФИГ. 57 показан колпачок 1720, включающий заостренный элемент на основании углубления 1732 для простоты манипуляций с магнитным элементом. Дополнительно ФИГ. 58 включает выпукло закругленный элемент на основании углубления для упрощения манипуляций с магнитным элементом. В другом варианте осуществления можно использовать вогнуто закругленный элемент. Эти и другие элементы могут быть включены в углубление, в котором размещен магнитный элемент, для обеспечения простоты манипуляций с ним во время процедур ориентирования его магнитной оси.
На ФИГ. 59 показано выравнивание магнитной оси магнитного элемента 1630 в соответствии с другим вариантом осуществления, в котором магнитный элемент 1630 муфты иглы 1626 или другого подходящего компонента расположен непосредственно над электромагнитной или другой подходящей магнитной катушкой 1740 так, что магнитный элемент расположен внутри симметричного магнитного поля, представленного линиями магнитного поля 1742 на ФИГ. 59. Такое расположение позволяет магнитному элементу выравнивать свою магнитную ось с магнитным полем катушки 1740, таким образом позволяя магнитной оси магнитного элемента по существу и соосно выравниваться с продольной осью канюли иглы 1612, как и желательно. Этот процесс не требует размещения магнитного элемента 1630 во внутреннем магнитном поле, таком как в отверстии узла выравнивающей катушки 1680, описанной в связи с ФИГ. 52А-54С, а вместо этого использует потенциально более удобное внешнее магнитное поле.
Следует отметить, что, помимо выравнивания магнитной оси магнитного элемента соосно с продольной осью канюли иглы, в других вариантах осуществления возможно выравнивать магнитную ось вдоль других желательных направлений, таких как, например, перпендикулярных продольной оси канюли. Таким образом, предусмотрены эти и другие варианты.
Варианты осуществления настоящего изобретения могут быть осуществлены в других конкретных формах без отклонения от сущности настоящего описания. Описанные варианты осуществления во всех отношениях следует рассматривать только как иллюстративные, а не ограничивающие. Таким образом, объем вариантов осуществления определяется приложенной формулой изобретения, а не приведенным выше описанием. Все изменения, которые имеют место в отношении значения и диапазона эквивалентности формулы изобретения, считаются включенными в ее объем.
Реферат
Группа изобретений относится к медицинской технике, а именно к системе направления для помощи при введении иглы в организм пациента. Узел иглы содержит муфту, имеющую углубление; канюлю, дистально проходящую из муфты вдоль продольной оси, причем канюля образует дистальный кончик иглы; и магнитный элемент, включенный в муфту. Магнитный элемент размещен внутри упомянутого углубления и выполнен с возможностью движения и ориентации внутри этого углубления и с возможностью закрепления после движения и ориентации. Причем магнитный элемент определяет магнитную ось и расположен так, что его магнитная ось выровнена в желательной предварительно заданной ориентации относительно канюли. Способ применения узла иглы включает: обеспечение узла иглы, включающего канюлю, проходящую вдоль продольной оси до дистального кончика иглы, и магнитного элемента, включающего магнитную ось и размещаемого внутри углубления узла иглы; ориентирование магнитного элемента таким образом, что магнитная ось по существу соосно выравнивается с продольной осью канюли до закрепления магнитного элемента внутри углубления; отслеживание положения магнитного элемента с определением положения дистального кончика иглы; и введение по меньшей мере дистального кончика иглы в тело пациента с применением отслеживаемого положения дистального кончика иглы. Во втором варианте выполнения узла иглы, магнитный элемент включает отверстие, через которое проходит часть канюли. При этом магнитный элемент определяет магнитную ось и расположен таким образом, что магнитная ось по существу соосно выровнена с продольной осью канюли. Изобретения обеспечивают повышение точности размещения дистального кончика иглы в организме пациента. 3 н. и 17 з.п. ф-лы, 59 ил.
Формула
Документы, цитированные в отчёте о поиске
Система для определения положения медицинского инструмента
Комментарии