Катетер с последовательно соединенными сенсорными структурами и способы калибровки и обнаружения - RU2655294C2
Код документа: RU2655294C2
Чертежи

Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к катетерам, а именно к катетерам с возможностями определения локализации или ориентации и давления.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В некоторых диагностических и лечебных методиках катетер вводится в полость сердца и приводится в контакт с внутренней стенкой сердца. Например, при внутрисердечной радиочастотной (РЧ) абляции катетер с электродом в его периферическом наконечнике через сосудистую систему пациента вводится в камеру сердца. Электрод приводится в контакт с участком (участками) эндокарда и распознает электрическую активность внутри камеры сердца. Кроме того, через катетер к электроду может быть приложена РЧ-энергия с целью локального удаления части ткани сердца.
Катетеры для выполнения картирования и абляции, как правило, несут один или более магнитных датчиков положения, генерирующих импульсы, которые используются для выявления координат положения дистального сегмента катетера. С этой целью в непосредственной близости от пациента приводятся в действие генераторы магнитного поля с целью создания магнитных полей. Как правило, генераторы поля представляют собой катушки, которые располагают в заданных положениях снаружи от пациента ниже его туловища. Эти катушки создают магнитные поля, которые воспринимаются магнитным датчиком положения катетера. Датчик генерирует электрические импульсы, которые поступают на импульсный процессор по кабелям, идущим через катетер.
Для выполнения необходимой диагностической процедуры и достижения лечебного эффекта необходим надлежащий контакт электрода с эндокардом. Однако чрезмерное надавливание может вызвать нежелательное повреждение ткани сердца и даже перфорацию стенки сердца. Для определения давления катетер, как правило, снабжен миниатюрной передающей катушкой и тремя измерительными катушками, расположенными на противоположных участках гибко присоединенного дистального сегмента наконечника. Передающая катушка ориентирована вдоль продольной оси катетера, три измерительные катушки также ориентированы вдоль продольной оси, но размещены на равном расстоянии от передающей катушки и в равноудаленных положениях радиально вокруг продольной оси катетера. Миниатюрная передающая катушка создает магнитное поле, которое распознается тремя измерительными катушками. Они, в свою очередь, генерируют импульсы, характеризующие осевое смещение и угловое отклонение между противоположными участками дистального сегмента наконечника.
Оси измерительных катушек параллельны оси катетера (и, соответственно, друг другу при условии ненарушенного соединения). Таким образом, измерительные катушки отфигурированы для генерирования мощных импульсов в ответ на поля, создаваемые миниатюрным генератором поля. В зависимости от удаленности катушек импульсы значительно отличаются. Угловое отклонение дистального сегмента с миниатюрным генератором поля обусловливает дифференциальное изменение сигналов, генерируемых измерительными катушками и зависящих от направления и амплитуды отклонения, после того как одна или две из этих катушек смещаются ближе к генератору поля. Компрессионное смещение дистального сегмента обусловливает увеличение генерирования импульсов всеми тремя измерительными катушками. Предварительная калибровка взаимосвязи между давлением, прилагаемым к дистальному сегменту, и движением соединения может быть использована процессором для перевода величины импульсов катушек в показатели давления. Преимущество комбинированного распознавания смещения и отклонения позволяет датчикам определять давление правильно, независимо от вида контакта электрода с эндокардом - прямо или под углом.
Традиционно катетер, поддерживающий функции сенсорного определения смещения и давления, может иметь шесть кабелей, по одному для каждой из трех измерительных катушек положения и три для измерительной катушки давления, каждый кабель представляет собой витую пару проводов. Производство и установка кабелей являются трудоемкими и дорогими. Кроме того, кабели занимают место в ограниченном пространстве катетера и подвержены повреждению. Уменьшение количества кабелей, используемых в катетере, или их длины предоставляет ряд преимуществ, в том числе снижение временных затрат на производство катетера, снижение стоимости его производства, а также увеличение общей производительности катетера.
Для выполнения некоторых методик катетеризации необходимо использование дополнительного катетера в непосредственно близкой к основному катетеру области. Когда металлические детали дополнительного катетера создают помехи для работы измерительных катушек основного катетера, имеет место так называемый эффект помех близкого расположения (ЭПБ). Например, когда измерительная катушка давления реагирует на изменения магнитного поля в связи магнитными помехами, создаваемыми соседним катетером, а не на физическую деформацию дистального сегмента в результате его контакта с тканью, импульсы катушки могут ввести в заблуждение оператора, действия которого основаны на результатах обработки процессором катетера таких импульсов.
Поэтому желательно использовать катетер с комбинированной или упрощенной системой распознавания положения и давления, сокращая таким образом число кабелей измерительной катушки или их длину. Более того, желательно использовать катетер, способный распознавать помехи магнитных полей, вызванные факторами, отличными от физической деформации дистального наконечника в результате контакта с тканью.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Предметом данного изобретения является катетер, восприимчивый к внешним и внутренним генераторам магнитных полей для создания данных о положении с целью определения положения катетера внутри объема зондирования магнитных полей, а также данных о давлении с целью определения давления, которое прилагается к дистальному концу катетера во время контакта с тканью с сокращенным количеством кабелей измерительных катушек с целью минимизации помех в работе и повреждений кабелей катетера.
В одном из вариантов реализации изобретения дистальный сегмент катетера адаптирован для контакта с тканью пациента и имеет центральный участок, дистальный участок и гибкое соединение. Один из участков (центральный или дистальный) содержит внутренний генератор магнитного поля, а другой участок (центральный или дистальный) имеет множество основных измерительных катушек и множество дополнительных измерительных катушек. Каждая из основных измерительных катушек ориентирована по одной оси с генератором поля, восприимчива ко внутреннему генератору магнитного поля и генерирует импульсы, характеризующие давление, прилагаемое к дистальному сегменту. Каждая из дополнительных измерительных катушек взаимно ортогональна любой другой из них, восприимчива к каждому из множества внешних генераторов магнитного поля и генерирует импульсы, характеризующие положение дистального сегмента. Как минимум одна основная измерительная катушка и одна дополнительная измерительная катушка соединены одна с другой с помощью кабеля.
В одном из вариантов реализации изобретения имеются три основные измерительные катушки и две дополнительные измерительные катушки.
В одном из вариантов реализации изобретения основные измерительные катушки адаптированы для генерирования импульсов, характеризующих давление, прилагаемое к дистальному сегменту, а дополнительные измерительные катушки адаптированы для генерирования импульсов, характеризующих положение дистального сегмента.
В одном из вариантов реализации изобретения основная измерительная катушка также восприимчива к каждому из внешних генераторов магнитного поля и генерирует импульсы, характеризующие положение дистального сегмента.
В одном из вариантов реализации изобретения имеются основная пара, состоящая из основной и дополнительной измерительных катушек, которые соединены основным кабелем, и дополнительная пара, состоящая из основной и дополнительной измерительных катушек, которые соединены дополнительным кабелем.
В одном из вариантов реализации изобретения гибкое соединение включает упругий элемент, приспособленный для осуществления осевого смещения и углового отклонения между центральным и периферическим участками дистального сегмента.
В одном из вариантов реализации изобретения каждое магнитное поле отличается по частоте, фазе или времени.
Предметом данного изобретения также являются способ калибровки катетера для восприятия положения и давления и способ обнаружения помех магнитного поля, создаваемых катетеру другим катетером или другим металлическим или железосодержащим объектом. Данное изобретение преимущественно использует импульсы от датчиков Sx и Sy как резерв или контроль ошибок. Калибровка давления выполняется на катетере в процессе производственного изготовления. Идентифицируя характеристики деформации дистального сегмента, прилагая силы с известной амплитудой к части дистального сегмента под различными вариантами выбранных углов (например, сжимающие нагрузки, осевые нагрузки и т. д.) и измеряя осевое смещение и угловое отклонение, составляется основной калибровочный файл импульсов, которые могут быть произведены датчиками давления в ответ на магнитные поля, созданные внутренним генератором поля MF. Файл записывается в память. Одновременно составляется и хранится в памяти дополнительный калибровочный файл импульсов, которые могут быть произведены датчиком положения в ответ на магнитное поле, созданное внутренним генератором поля MF. Когда катетер находится в рабочем состоянии внутри тела пациента, импульсы от датчиков давления в ответ на внутренний генератор поля MF сопоставляются с основным файлом, хранящимся в памяти, для получения данных об осевом смещении и угловом отклонении с целью вывода данных о давлении катетера оператору. Импульсы положения, включая импульсы в ответ на внутренний генератор поля MF, преимущественно сопоставляются с дополнительным файлом для обнаружения и идентификации расхождений. В случае выявления расхождений пользователю поступают сигналы о наличии таких расхождений.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Данные и другие особенности и преимущества настоящего изобретения будут лучше поняты при обращении к нижеследующему подробному описанию при условии рассмотрения вместе с прилагаемыми чертежами.
Фиг.1 представляет собой схематичную наглядную иллюстрацию медицинской системы на основе катетера в соответствии с вариантом реализации настоящего изобретения.
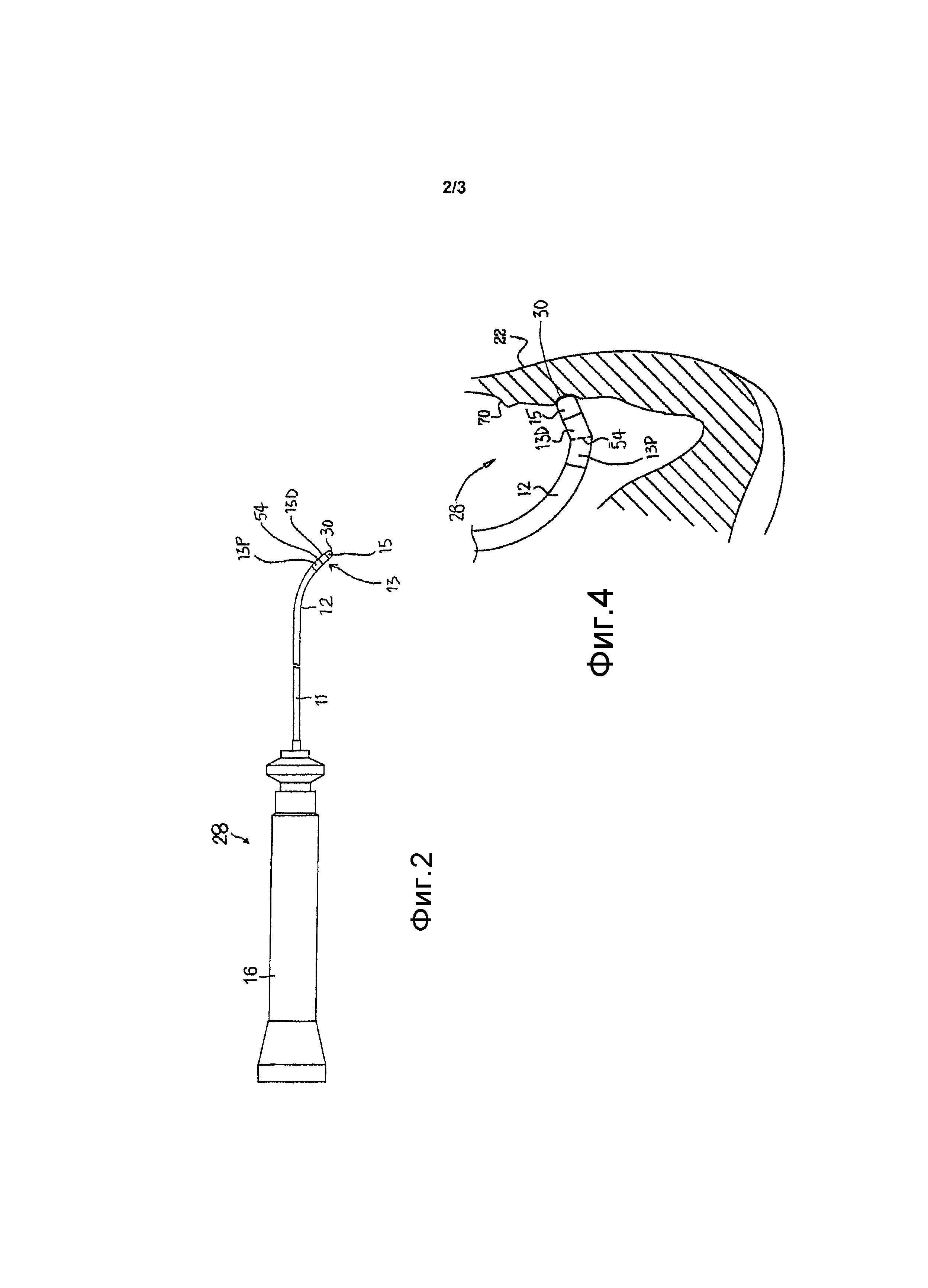
Фиг.2 представляет собой боковое изображение катетера, предназначенного для использования совместно с системой на фиг.1, в соответствии с вариантом реализации настоящего изобретения.
Фиг.3 представляет собой схематичное изображение в разрезе, демонстрирующее подробности дистального сегмента катетера, представленного на фиг.2.
Фиг.4 представляет собой схематичное подробное изображение, демонстрирующее дистальный сегмент, представленный на фиг.3, в контакте с тканью эндокарда.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Предметом настоящего изобретения является система с катетером, предназначенная для выполнения катетеризации сердца, в которой катетер имеет сенсорный узел, генерирующий импульсы, характеризующие как положение катетера, так и давление, прилагаемое к дистальному сегменту катетера при контакте с тканью. По сравнению с традиционными приборами распознавания положения и приборами распознавания давления сенсорное устройство механизма данного катетера имеет преимущества, связанные с использованием серийно-проводных сенсорных устройств с сокращенным числом кабелей или их длины, что упрощает структуру и позволяет минимизировать риск повреждения или выхода кабелей из строя.
Фиг.1 представляет собой схематичную наглядную иллюстрацию традиционной системы 20, предназначенной для проведения катетеризации сердца, известную в данной области техники. Система 20 может быть основана, например, на системе CARTO.TM., которую производит Biosense Webster Inc. (Diamond Bar, Calif.). Данная система содержит инвазивный зонд в виде катетера 28 и пульт управления 34. В одном из вариантов реализации настоящего изобретения, описанном ниже, предполагается, что катетер 28 используется для абляции (удаления) ткани эндокарда, как известно в данной области. В альтернативном варианте соответственно измененный катетер может быть использован для других лечебных или диагностических целей в сердце или другом органе тела. Как изображено на фиг.2, катетер 28 состоит из удлиненного корпуса катетера 11, отклоняемого промежуточного сегмента 12, дистального сегмента 13, несущего как минимум концевой электрод 15 на своем периферическом конце 30, а также рычага управления 16.
Оператор 26, например кардиолог, вводит катетер 28 через сосудистую систему пациента 24 таким образом, что дистальный сегмент 13 катетера проникает в камеру сердца 22 пациента. Оператор продвигает катетер так, что дистальный конец 30 катетера приходит в контакт с тканью эндокарда 70 в заданном участке или участках. Катетер 28 в его центральной оконечности соединен посредством подходящего соединителя с пультом управления 34. Пульт управления может состоять из радиочастотного (РЧ) генератора, который поставляет высокочастотную электрическую энергию через катетер для абляции (удаления) ткани сердца в зонах контакта с периферическим сегментом 13. Альтернативно или дополнительно катетер и система могут быть отфигурированы для выполнения других лечебных и диагностических процедур, известных в данной области.
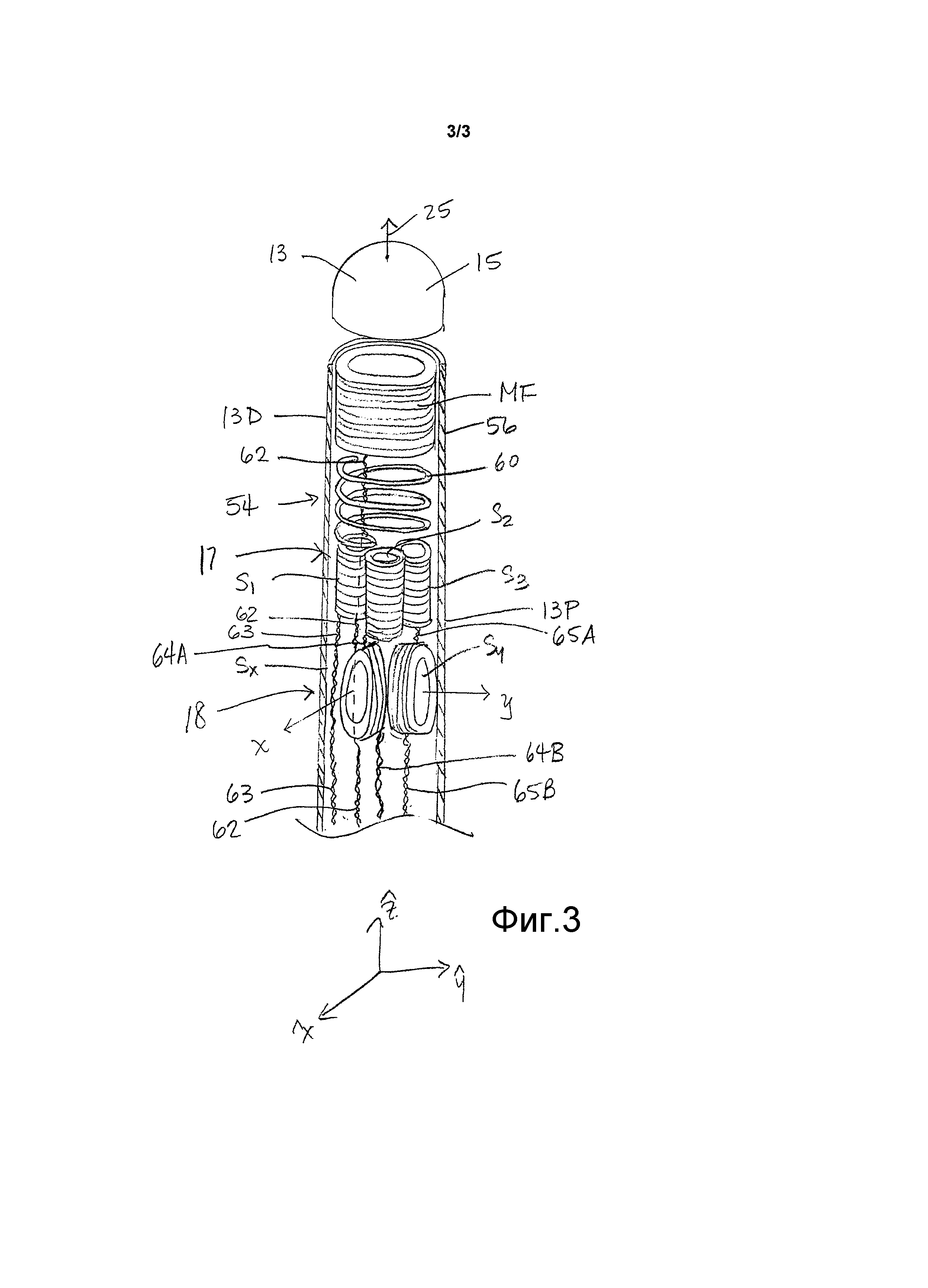
Пульт управления 34 использует магнитное зондирование для распознавания данных о давлении и положении, включая (i) осевое смещение и угловое отклонение дистального сегмента 13 в зависимости от давления в месте контакта с тканью эндокарда 70, а также (ii) координаты положения дистального сегмента 13 в сердце. С целью получения данных о давлении, включая осевое смещение и угловое отклонение дистального сегмента 13 катетера 28, цепь управления 38 консоли 34 управляет миниатюрным генератором магнитного поля MF, помещенным в периферической части 13D концевого сегмента 13, как показано на фиг.3. В одном из раскрытых вариантов реализации настоящего изобретения генератор поля MF представляет собой катушку, ось которой соосна оси Z, совпадающей с продольной осью 25 катетера.
Для обнаружения и измерения давления дистальный сегмент 13 имеет центральный участок 13P и дистальный участок 13D, которые соединены друг с другом с помощью гибкого и эластичного соединения 54, которое может быть выполнено из любого подходящего материала с заданными показателями гибкости и прочности. Эластичное соединение 54 допускает ограниченный диапазон относительной подвижности между участками 13P и 13D в ответ на воздействия сил, приложенных к дистальному сегменту 13. Такие силы возникают, когда дистальный конец 30 сжимается на эндокарде в ходе процедуры абляции. Как показано на фиг.4, дистальный конец 30 катетера 28 находится в контакте с эндокардом 70 сердца 22 в соответствии с одним из вариантов реализации настоящего изобретения. Давление, оказываемое периферическим концом 30 на эндокард, деформирует ткань эндокарда незначительно, так что концевой электрод 15 контактирует с тканью на относительно большом участке. Если электрод взаимодействует с эндокардом под углом, а не прямо, дистальный участок 13D изгибается в соединении 54 относительно центрального участка 13З. Изгиб способствует оптимальному контакту между электродом 15 и тканью эндокарда 70.
Как показано на фиг.3, соединение 54 включает внешнюю трубку 56, которой может служить внешняя трубка 55 дистального сегмента 13, выполненная из гибкого изолирующего материала, такого как Celcon.RTM., Teflon.RTM или термостойкий полиуретан. Или же трубка 56 может быть выполнена из материала, специально предназначенного для обеспечения беспрепятственного изгибания и сжатия соединения. (Изображение такого материала на фиг.3 удалено для того, чтобы продемонстрировать внутреннее устройство катетера.) Дистальный участок 13D, как правило, относительно жесткий по сравнению с остальной частью катетера.
Кроме того, соединение 54 содержит также упругий соединительный элемент 60 в виде пружины или полой детали из эластичного материала с винтовой резьбой по длине. Эластичный материал может быть представлен, например, полимером, таким как силикон, полиуретан, или пластмассами, или суперэластичным сплавом, таким как никель-титановый (Nitinol). Спиральный канал заставляет трубчатый фрагмент работать как пружину в ответ на воздействия, оказываемые на дистальный сегмент 13D. Дополнительные подробности относительно изготовления и технических параметров данного вида соединительных элементов представлены в патентной заявке, зарегистрированной в США, под серийным №12/134592 от 6 июня 2008, которая переуступлена правопреемнику настоящей патентной заявки, раскрытие ее сущности включено в данный документ в качестве ссылки. В качестве альтернативы данный соединительный элемент может содержать любой другой подходящий вид пружинного устройства с заданными параметрами упругости и прочности.
Жесткость соединительного элемента 60 определяет амплитуду относительного перемещения дистальных сегментов 13P и 13D в ответ на силы, приложенные к дистальному сегменту 13D. Такие силы возникают при надавливании дистальной части 30 наконечника на эндокард в ходе процедур картирования или абляции. Для хорошего электрического контакта между дистальным сегментом 13D и эндокардом в ходе абляции заданное давление должно составлять порядка 20–30 грамм. Соединительный элемент 60 устроен таким образом, чтобы обеспечить продольное смещение (то есть боковое движение вдоль продольной оси 25 катетера 28) и угловое отклонение дистального сегмента 13D пропорционально надавливанию на дистальный конец 30 наконечника. Измерение смещения и отклонения определяет величину давления и таким образом помогает убедиться, что в ходе абляции давление применяется правильно.
Электромагнитное или магнитное поле, создаваемое внутренним генератором поля MF, вмонтированным в дистальный сегмент 13D, зондируется и распознается с помощью датчика основного узла 17, который вмонтирован в центральный сегмент 13P. В показанном варианте основной узел датчиков 17 включает катушки датчика S1, S2 и S3, расположенные в центральном сегменте 13D дистальной зоны 13. Каждая из этих катушек в целом параллельна оси Z или продольной оси 25. Все три катушки расположены в основной осевой зоне под различными азимутальными углами по отношению к продольной оси 25 или оси Z, здесь осевая плоскость определена как плоскость, перпендикулярная продольной оси катетера или оси Z, а осевая зона определена как зона, заключенная между двумя осевыми плоскостями катетера. Три катушки могут быть расположены в пространстве отдельно друг друга по азимуту 120 градусов на одинаковом радиальном расстоянии от оси.
Осевое смещение или угловое отклонение дистального сегмента 13D относительно центрального сегмента 13P порождает дифференциальное изменение выходного сигнала катушек S1, S2 и S3 в зависимости от направления и величины отклонения, когда одна или две из этих катушек двигаются относительно близко к генератору поля MF. Компрессионное смещение дистального сегмента 13D приводит к увеличению сигналов от каждой из катушек S1, S2 и S3. Изменение направления магнитного поля генератором поля MF заставляет катушки S1, S2 и S3 создавать электрические сигналы с амплитудами, которые указывают на такие смещения или угловые отклонения. Процессор обработки сигналов 36 получает и обрабатывает сигналы, созданные катушками S1, S2 и S3, чтобы определить показатель давления, оказываемого дистальной зоной 13 на эндокард 70.
Для получения данных о положении или координатах цепь управления генератором 38 консоли 34 включает внешние генераторы магнитного поля, например F1, F2 и F3, чтобы создать магнитные поля в зоне заданных координат тела пациента 24 и определить внешние границы опорного сигнала. Генераторы F1, F2 и F3 оснащены катушками, которые располагаются снаружи под туловищем пациента на определенных положениях. Данные катушки создают магнитные поля внутри тела пациента в предопределенном рабочем объеме, который включает сердце 22.
Дополнительный узел датчиков 18 размещен в центральном сегменте 13P проксимальнее основного узла датчиков 17 для реагирования на поля генераторов F1, F2 и F3 и создания электрических сигналов. В показанном варианте узел датчиков 18 включает как минимум две миниатюрные измерительные катушки Sx и Sy без сердечника. Оси катушек, как правило, взаимно ортогональны друг другу и как минимум с осью одной катушки основного узла датчиков 17, например катушки S1. Таким образом, внутри системы координат (Х, Y, Z) катушка Sx выровнена с осью X, катушка Sy выровнена с осью Y, обе катушки ортогональны катушке S1, выровненной с осью Z.
Две катушки (Sx и Sy) расположены в дополнительной осевой зоне (например, проксимально от основной осевой зоны основного узла датчиков 17) под различными азимутальными углами относительно продольной оси 25 и оси Z, где осевая плоскость определена как плоскость, перпендикулярная оси катетера или оси Z, и ограничена внутри двух осевых плоскостей катетера. Две катушки могут быть расположены в пространстве отдельно по азимуту 120 градусов по отношению друг к другу и относительно катушки S1 основного узла датчиков 17 на одинаковом радиальном расстоянии от оси.
Электромагнитное или магнитное поле создаются внешними генераторами полей F1, F2, F3 и воспринимаются с помощью катушек S1, Sx и Sy с целью определения положения катетера. Под влиянием магнитных полей, создаваемых генераторами полей F1, F2 и F3, катушки S1, Sx и Sy создают электрические сигналы с амплитудами, показывающими положение дистального сегмента 13, соотносящееся с фиксированными рамками опорного сигнала генераторов полей F1, F2 и F3. В одном варианте три генератора полей F1, F2 и F3 генерируют магнитное поле, состоящее из трех по-разному ориентированных компонентов. Каждый из этих компонентов поля определяется катушкой S1, Sx и Sy, каждая из которых создает сигнал, состоящий из трех компонентов.
Как показано на фиг.1, процессор обработки сигналов 36 панели управления 34 обрабатывает данные сигналы от катушек S1, Sx и Sy с целью определить координаты положения дистального сегмента 13, включая, как правило, как координаты расположения, так и координаты ориентации. Похожий способ определения положения реализован в вышеупомянутой системе CARTO и подробно описан в зарегистрированных в США патентах № 5391199, 6690963, 6484118, 6239724, 6618612 и 6332089, патенте договора о патентной кооперации WO 96/05768 и в опубликованных в США патентных заявках 2002/0065455 A1, 2003/0120150 A1 и 2004/0068178 A1, все их раскрытия включены в данный документ в виде ссылки.
Сигналы от основного узла датчиков 17 и дополнительного узла датчиков 18 передаются на процессор обработки сигналов 36 по кабелям. В соответствии с особенностью настоящего изобретения выбранные датчики из основного узла датчиков 17 и дополнительного узла датчиков 18 последовательно соединяются, общие кабели совместно используются для передачи сигналов датчиков на процессор обработки сигналов. В представленном на фиг.3 варианте кабели 63, 64A и 65A отходят от датчиков S1, S2 и S3 соответственно. Кабель 63 ведет от датчика S1 к процессору обработки сигналов 36. Кабель 64A ведет от датчика S2 к датчику Sx, соединяя их последовательно. Кабель 65A ведет от датчика S3 к датчику Sy, соединяя их последовательно.
Как описано выше, каждый из датчиков S1, S2 и S3 создает сигналы, характерные для воздействия давлением (включая осевое смещение и угловое отклонение) на дистальный сегмент 13, полученные путем распознавания магнитного поля, созданного внутренним генератором полей MF. Выше также описано, что каждый из датчиков S1, Sx и Sy создает сигналы, соответствующие положению дистального сегмента, полученные путем распознавания каждого магнитного поля, созданного внешними генераторами поля F1, F2 и F3.
Соответственно по кабелю 63 на процессор обработки сигналов 36 передаются сигналы, созданные датчиком S1 и характерные для воздействия давлением. По кабелю 64B на процессор обработки сигналов 36 передаются 2 вида сигналов: созданный датчиком S2, характерный для воздействия давлением, и созданный датчиком Sx, характерный для изменения положения. По кабелю 65B на процессор обработки сигналов 36 передаются 2 вида сигналов: созданный датчиком S3, характерный для воздействия давлением, и созданный датчиком Sy, характерный для изменения положения. Результирующие комбинированные сигналы, передаваемые по кабелям 64B и 65B, создают общие суммы, которые могут быть разделены с помощью электронной фильтрации, когда рабочие частоты распознавания положения и силы соответственно разделяются в частотном пространстве, что понятно любому специалисту в данной области.
Процессор обработки сигналов 36 как таковой непосредственно связан только с тремя кабелями, а именно с 63, 64B и 65B, для получения сигналов от пяти датчиков положения и давления по сравнению с типичными пятью или шестью кабелями традиционного катетера с пятью или шестью датчиками положения и давления. Более того, кабели 64A и 65A, последовательно соединяющие спаренные датчики, значительно короче.
Производство каждого кабеля и его монтаж в катетере являются трудоемкими и дорогими. Более того, кабели занимают место в ограниченном пространстве катетера. К тому же кабели чувствительны к повреждениям. Уменьшенное количество или длина кабелей, передающих сигналы на процессор обработки сигналов, предоставляет ряд преимуществ, включая уменьшение времени производства катетера, увеличение общей производительности катетера, снижение производственных затрат.
Следует понимать, что настоящим изобретением предусмотрены для серийной проводки или соединения различные пары датчиков. В альтернативных вариантах могут быть последовательно соединены, например, датчики S1 и Sx с S2 и Sy или датчики S3 и Sx с S1 и Sy. Для датчиков S1, S2, S3, Sx и Sy существуют шесть возможных перестановок спаривания, в том числе возможны одна или две последовательно соединенные пары в периферическом сегменте 13.
Поскольку в дистальной части 13D катушка генератора MF радиально симметрична, она хорошо подходит для осевого выравнивания с продольной осью 25 катетера. Однако следует понимать, что катушка также может быть внеосевой по желанию либо необходимости, внеосевой наклон катушки будет одновременно улучшать конкретную катушку и ухудшать другую катушку взаимно ортогональных датчиков.
Понятно также, что катушки основного и дополнительного узлов датчиков 17 и 18 могут быть любого подходящего размера и формы при условии их соответствия ограничениям компоновки внутри дистального сегмента 13 в отношении выравнивания или взаимной ортогональности. Традиционные датчики давления, как правило, цилиндрические, то есть длиннее и уже, из-за выравнивания оси Z с генератором MF в пределах дистального сегмента, в то время как традиционные датчики положения X и Y, как правило, имеют более эллиптическую форму, чтобы таким образом поддерживать взаимную ортогональность с датчиком Z положения в соответствии с ограничениями компоновки дистального сегмента. В раскрытом варианте данного изобретения датчики S1, S2 и S3 настраиваются более как традиционные датчики давления и таким образом относительно длиннее и уже, в то время как датчики Sx и Sy настраиваются как более традиционные датчики положения и таким образом являются более эллиптическими. Датчики положения и давления описаны в патентах США № 6690963 и публикации США № 20090138007, публичные раскрытия которых включены в настоящий документ в качестве ссылки. В показанном варианте катушки датчиков S1, S2 и S3 сконфигурированы как датчики положения, а катушки датчиков Sx и Sy - как датчики давления.
Генераторы полей F1, F2, F3 и MF создают магнитные поля, которые различимы в отношении разных параметров, включая частоту, фазу или время; катушки датчиков S1, S2, S3, Sx и Sy генерируют сигналы от изменения потока магнитного поля различимых магнитных полей, сигналы катушек датчиков также различимы. Частота, фаза или время мультиплексирования применяются в случае необходимости или по желанию. Например, ток к генератору давления MF может вырабатываться на выбранной частоте в диапазоне около 16 и 25 кГц, в то время как генераторы положения F1, F2 и F3 приводятся в движение на различных частотах.
Процессор обработки сигналов 36 обрабатывает сигналы с целью определения данных, включая (i) координаты положения дистального сегмента 13, обычно как расположения, так и ориентации, и (ii) осевое смещение и угловое отклонение периферического сегмента 13. Процессор обработки сигналов 36 может содержать компьютер общего назначения с подходящим устройством предварительной обработки данных и схемами интерфейса для получения сигналов от катетера 28 и контроля других компонентов панели управления 34. Для осуществления описанных в настоящем документе функций процессор может быть снабжен специальным программным обеспечением. Программное обеспечение можно загрузить на панель управления 34 в электронном виде, например в сети, или оно может быть предоставлено на носителях, таких как оптические, магнитные или электронные устройства памяти. В другом варианте некоторые или все функции процессора 36 могут выполняться специализированными или программируемыми компонентами цифровых аппаратных средств. На основе сигналов, получаемых от катетера и других компонентов системы 20, процессор 36 управляет дисплеем 42, который предоставляет оператору 26 визуальную обратную связь о положении дистального конца 30 в теле пациента, а также относительном осевом смещении и угловом отклонении дистального наконечника катетера и информацию о состоянии и рекомендации относительно текущей процедуры.
Процессор 36 получает эти сигналы по кабелям 63, 64B и 65B, идущим через катетер 28, и обрабатывает их с целью получить координаты положения и ориентации дистального сегмента 13 в данной фиксированной системе координат, а также получить информацию об оказываемом давлении, включая осевое смещение и угловое отклонение дистального сегмента. Расположение катушек S1, S2, S3, Sx и Sy и давление, оказываемое на дистальный сегмент 13D дистальной зоны 13, могут быть рассчитаны по характеристикам полей, таким как сила и направление, определяемым с помощью катушек. Таким образом, генераторы полей F1, F2, F3 и MF и катушки зондирования S1, S2, S3, Sx и Sy совместно определяют множество пар «передатчик-приемник», где каждая такая пара включает один генератор поля и катушку как элемент пары, каждая катушка расположена в положении и ориентации, отличной от других катушек. Определяя характеристики передачи полей между элементами различных пар, система раскрывает данные о положении и давлении от последовательно соединенных датчиков с целью отследить информацию, относящуюся к расположению дистальной зоны 13 во внешних рамках, как определяется генераторами полей F1, F2, и F3 и информацией, относящейся к давлению, оказываемому на дистальный сегмент MF, как зарегистрировано в магнитном поле, созданном генератором поля MF. Информация о положении может включать положение дистальной зоны 13, ориентацию дистальной зоны 13 либо и то и другое. Как понятно любому специалисту в данной области техники, вычисление информации о положении зависит от расположения генераторов полей F1, F2 и F3 в известных положениях и их ориентации относительно друг друга, а вычисление давления, основанное на осевом смещении и угловом отклонении, зависит от расположения генератора поля MF и катушек датчиков S1, S1 и S3 в известных положениях и их ориентации относительно друг друга.
Катушки F1, F2, F3 и MF, создающие поле, являются одним из типов магнитного преобразователя, который может использоваться в вариантах данного изобретения. Магнитный преобразователь в контексте данной патентной заявки и в формуле изобретения - это прибор, который может генерировать магнитное поле в ответ на поданный электрический ток или выдавать электрический ток в ответ на поданное магнитное поле. Несмотря на то что в описанном варианте в роли магнитного преобразователя используются катушки, в альтернативных вариантах могут использоваться другие типы магнитных преобразователей, что понятно для специалистов в этой отрасли.
В дополнение к вышеописанным в измерительном узле могут использоваться различные иные конфигурации катушек. Например, положения генератора поля MF и катушек S1, S2 и S3 могут быть обратны, генератор поля MF может располагаться в проксимальной части 13D проксимальнее шарнира 54, а измерительные катушки будут находиться в дистальной части 13D. В другом варианте катушки S1, S2 и S3 будут служить генераторами магнитного поля (используя мультиплексирование по времени или частоте), в то время как катушка генератора поля MF будет работать как измеритель. Размеры и формы передающих и измерительных катушек, показанные на фиг.3 только для примера, можно использовать большее или меньшее количество катушек в различных положениях, чтобы узел содержал хотя бы две катушки в различных радиальных положениях для дифференциального измерения отклонения шарнира.
В соответствии с другой частью данного изобретения, так как катушки Sx и Sy перпендикулярны и не соосны с осью миниатюрного генератора поля MF, его магнитное поле диполя можно обнаружить с помощью перпендикулярных катушек Sx и Sy. Катушки Sx и SCY могут фиксировать относительно слабое магнитное поле, создаваемое генератором MF, по сравнению с катушками S1, S2 и S3 из-за их соответствующей ориентации по отношению к генератору магнитного поля MF, при этом повышенная чувствительность ведет к помехам, создаваемым близостью к валу, то есть изменения в магнитном поле могут быть следствием создания магнитного поля генератором MF, отслеживаемого катушками S1, S2 и S3, из-за физической деформации дистальной секции 13 в результате взаимодействия с тканью или просто следствием магнитных помех от металлических или железных элементов или смежных катетеров.
Данное изобретение успешно использует сигналы от датчиков Sx и Sy, таких как возврат и проверка ошибки. Во время производства и установки катетера 28 сигналы измерителей Sx и Sy, которые производятся в ответ на внутренний генератор поля MF вне зависимости от влияния других близлежащих катетеров или металлических элементов, калибруются и сохраняются в память консоли 34. Так как эти сигналы слабее, чем те, которые создаются в датчиках S1, S2 и S3 в ответ на внутренний генератор поля, сигналы от Sx и Sy имеют уникальные признаки или характеристики. Поэтому, когда катетер 28 использует внутренний генератор поля для создания магнитного поля, которое считывается измерительными катушками Sx и Sy для определения давления, измерительные катушки Sx и Sy второго измерительного узла 18, считывая магнитные поля внешних генераторов поля F1, F2 и F3, также определяют магнитное поле внутреннего генератора поля MF. Сигнальный процессор 36 получает сигналы от датчиков Sx и Sy и идентифицирует сигналы, идущие от внутреннего генератора поля MF (в сравнении с теми, которые получаются под действием магнитного поля внешних генераторов поля F1, F2 и F3), и сравнивает с откалиброванными сигналами, сохраненными в памяти. Если сигнальный процессор 36 определяет несоответствие между этим и откалиброванными сигналами, консоль 34 передает индикацию этого несоответствия оператору и может включить визуальный или звуковой сигнал.
В одном варианте калибровка давления производится для дистального отдела 13 во время производства и выпуска. Определением деформационных характеристик упругого соединительного элемента 60, приложением на дистальную часть 13D определенной силы под несколькими заданными углами (т. е. компрессионная нагрузка, осевая нагрузка и т. д.) и определением осевого смещения и углового отклонения создается калибровочный файл для сигналов, которые могут быть произведены датчиками S1, S2 и S3 в ответ на магнитное поле, произведенное внутренним генератором поля MF, компилируется в первый файл и сохраняется в памяти. Одновременно калибровочный файл для сигналов, которые могут быть произведены датчиками Sx и Sy в ответ на магнитное поле, произведенное внутренним генератором поля MF, компилируется во втором файле и сохраняется в памяти.
Когда катетер используется в человеческом теле, сигнальный процессор 36 получает сигналы от датчиков S1, S2 и S3 в ответ на внутренний генератор поля MF и сравнивает эти сигналы с первым файлом, сохраненным в памяти, для получения данных об осевом смещении и угловом отклонении для вывода данных о давлении катетера оператору. Удобно, что процессор 36 также получает сигналы от датчиков Sx и Sy, которые включают их в ответ на внутренний генератор поля MF и сравнивают эти данные со вторым файлом для выявления и идентифицирования несоответствий.
Одновременно данное изобретение включает способ калибровки катетера для определения влияния магнитного поля, вызванного наличием второго катетера либо другого металлического или железного объекта, включая следующее:
1. Обеспечение катетера первым и вторым датчиками, которые приспособлены реагировать на магнитное поле, генерируемое генератором поля.
2. Запуск генератора поля для возможности создания первым и вторым датчиками калибровочных сигналов.
3. Приложение сил осевого смещения и углового отклонения на катетер.
4. Калибрование калибровочных сигналов первого датчика для создания первого калибровочного файла и калибрование калибровочных сигналов от второго датчика для создания второго калибровочного файла, включая следующее:
а. Приложение сил осевого смещения и углового отклонения на катетер.
б. Сохранение в памяти данных, представляющих сигналы, генерируемые первым датчиком в ответ на силы, приложенные к катетеру.
в. Сохранение в памяти данных, представляющих сигналы, генерируемые вторым датчиком в ответ на силы, приложенные к катетеру.
Данное изобретение включает также способ определения влияния на магнитное поле, определяемое первым катетером, присутствия второго катетера или металлического или железного объекта, включающий следующее:
1. Обеспечение катетера первым и вторым датчиками, которые приспособлены реагировать на магнитное поле, генерируемое генератором поля.
2. Запуск генератора поля для возможности создания первым и вторым датчиками калибровочных сигналов.
3. Приложение сил осевого смещения и углового отклонения на катетер.
4. Калибрование калибровочных сигналов первого датчика для создания первого калибровочного файла и калибрование калибровочных сигналов от второго датчика для создания второго калибровочного файла, включая следующее:
а. Приложение сил осевого смещения и углового отклонения на катетер.
б. Сохранение в памяти данных, представляющих сигналы, генерируемые первым датчиком в ответ на силы, приложенные к катетеру.
в. Сохранение в памяти данных, представляющих сигналы, генерируемые вторым датчиком в ответ на силы, приложенные к катетеру.
5. Когда катетер используется, запускается генератор поля для создания сигналов данных первым и вторым датчиками.
6. Сравнение сигналов данных от второго датчика с калибровочными сигналами во втором калибровочном файле.
Способ определения может также включать следующее:
7. Определения несоответствия между информационными сигналами от второго датчика и калибровочными сигналами во втором калибровочном файле.
8. Если определяется несоответствие, проводится отображение несоответствия пользователю.
Понятно, что определение несоответствия может проводиться с последовательно подключенными датчиками или без них. Иначе говоря, определение несоответствия использует два комплекта датчиков, например первый измерительный узел 17, а именно датчики S1, S2 и S3, и второй измерительный узел 18, а именно датчики Sx и Sy, в порядке сравнительного отображения. Когда датчики последовательно подключены между первым и вторым измерительными узлами, система может извлекать необходимые данные и сигналы.
Предшествующее описание изложено со ссылкой на конкретные примеры вариантов осуществления изобретения. Специалистам в области техники и технологии, к которой принадлежит настоящее изобретение, будет понятно, что описанная конструкция допускает модификации и изменения, не нарушающие принципы и сущность настоящего изобретения и не выходящие за рамки его объема. Необходимо понимать, что чертежи необязательно сводить к определенному масштабу. Таким образом, предшествующее описание не следует толковать как относящееся только к конкретным конструкциям, раскрытым и представленным на сопроводительных чертежах. Предшествующее описание скорее согласуется и подкрепляет нижеизложенную формулу изобретения, отражающую полный объем настоящего изобретения.
Реферат
Группа изобретений относится к медицинской технике, а именно к устройствам определения положения и измерения давления. Катетер для использования с системой катетеризации, имеющей множество внешних генераторов магнитного поля, каждый из которых генерирует магнитное поле для определения данных о положении, содержит гибкую трубку, дистальный отдел, предназначенный для контакта с тканью пациента, который содержит проксимальную часть, дистальную часть и гибкий шарнир между проксимальной и дистальной частями, внутренний генератор магнитного поля, расположенный в одной из проксимальной или дистальной частей, который служит для создания магнитного поля для измерения давления, первое множество измерительных катушек, определяющих давление, и второе множество измерительных катушек, определяющих положение, расположенных в другой из проксимальной и дистальной частей, причем первое множество измерительных катушек, определяющих давление, приспособлено для восприятия магнитного поля для определения данных о давлении и генерирования сигналов, представляющих данные о давлении, оказываемом на дистальный отдел во время контакта с тканью, второе множество измерительных катушек, определяющих положение, приспособлено для восприятия магнитных полей для определения данных о положении и генерирования сигналов, представляющих данные о положении дистального отдела, первый кабель, последовательно соединяющий по меньшей мере одну пару из по меньшей мере одной из первого множества измерительных катушек, определяющих давление, и по меньшей мере одной из второго множества измерительных катушек, определяющих положение, второй кабель, передающий сигнал от по меньшей мере одной пары для обработки сигналов. Во втором варианте выполнения катетер содержит по меньшей мере одну измерительную катушку для определения давления, расположенную в проксимальной части, каждая из которых выполнена с возможностью восприятия магнитного поля для определения данных о давлении и генерирования сигналов, представляющих данные о давлении, оказываемом на дистальный отдел при контакте с тканью, по меньшей мере две катушки для определения данных о положении, расположенные в проксимальной части, каждая из которых выполнена с возможностью восприятия магнитного поля для определения данных о положении и генерирования сигналов, представляющих данные о положении дистального отдела, первый кабель, последовательно соединяющий пару из одной из по меньшей мере одной измерительной катушки для определения давления и одной из по меньшей мере двух измерительных катушек для определения положения, второй кабель, передающий сигналы от пары, причем сигналы представляют как данные о положении дистального отдела, так и данные о давлении, оказываемом на дистальный отдел. Группа изобретений включает способ калибрования первого катетера для определения влияния магнитного поля, вызванного присутствием второго катетера или другого металлического либо железного объекта. Использование группы изобретений обеспечивает расширение арсенала средств для определения положения и измерения давления с помощью катетера. 4 н. и 16 з.п. ф-лы, 4 ил.
Формула
Документы, цитированные в отчёте о поиске
Калибровочная система для катетеров, чувствительных к давлению
Комментарии