Распознавание физиологической реакции пользователя молокоотсосом - RU2571652C2
Код документа: RU2571652C2
Чертежи










Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к сенсорному блоку и способу для распознавания физиологической реакции и инициирования изменения работы молокоотсоса в зависимости от физиологической реакции.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Выделению молока из молочной железы в процессе кормления грудью предшествует рефлекс поступления молока (MER), при котором сокращение миоэпителиальных клеток вокруг молочных желез заставляет молоко поступать в сосок. Пока MER-рефлекс не проявился молоко не выделяется или почти не выделяется.
MER-рефлекс естественным образом провоцируется сосательной деятельностью младенца. После проявления MER-рефлекса младенец естественным образом изменяет сосательную деятельность на ту, что будет способствовать непрерывному поступлению потока молока из молочной железы.
Желательно, чтобы искусственно созданный молокоотсос был способен не только провоцировать MER-рефлекс, но также был способен имитировать вторую стадию естественного сосательного процесса путем изменения типа стимуляции молочной железы после проявления MER-рефлекса. Однако чтобы реализовать изменение стимуляции в нужный момент, прежде всего, необходимо распознать проявление MER-рефлекса.
Согласно одному аспекту изобретения предложено устройство, содержащее сенсорный блок, выполненный с возможностью распознавания физиологической реакции пользователя молокоотсосом, распознавания рефлекса поступления молока на основе распознанной физиологической реакции и инициирования изменения работы молокоотсоса в зависимости от распознанного рефлекса поступления молока, при этом сенсорный блок расположен отдельно от воронки молокоотсоса.
Когда воронка молокоотсоса расположена вплотную к молочной железе пользователя, сенсорный блок может быть выполнен с возможностью распознавания упомянутой физиологической реакции из части тела пользователя, отличной от молочной железы пользователя.
Сенсорный блок может быть выполнен с возможностью инициирования изменения работы молокоотсоса из режима прилива грудного молока в режим сцеживания грудного молока, в ответ на распознавание рефлекса поступления молока.
Сенсорный блок может быть выполнен с возможностью распознавания состояния релаксации пользователя молокоотсосом на основе распознанной физиологической реакции.
Сенсорный блок может быть выполнен с возможностью инициирования изменения работы молокоотсоса из режима сцеживания грудного молока в режим прилива грудного молока, в ответ на распознавание расслабленного состояния пользователя молокоотсосом.
Сенсорный блок может быть выполнен с возможностью инициирования изменения работы молокоотсоса из нейтрального режима в релаксационный режим, в ответ на распознавание напряженного состояния пользователя молокоотсосом.
Сенсорный блок может быть выполнен с возможностью инициирования изменения работы молокоотсоса из режима прилива грудного молока в релаксационный режим, в ответ на распознавание напряженного состояния пользователя молокоотсосом.
Сенсорный блок может содержать датчик, выполненный с возможностью распознавания упомянутой реакции.
Датчик может представлять собой датчик электродермальной активности, выполненный с возможностью распознавания упомянутой реакции кожной ткани пользователя молокоотсосом.
Физиологическая реакция может представлять собой гальваническую реакцию кожи.
Физиологическая реакция может представлять собой пульс пользователя.
Физиологическая реакция может представлять собой частоту дыхания пользователя.
Физиологическая реакция может представлять собой температуру тела пользователя.
Физиологическая реакция может представлять собой вариабельность частоты сердечных сокращений.
Устройство может содержать перчатку, в которой располагается датчик.
Перчатка может содержать по меньшей мере одно отделение для пальцев, при этом датчик может располагаться по меньшей мере в одном отделении для пальцев для контакта с кожной тканью кисти руки пользователя, когда она вставлена в данное отделение.
Устройство может содержать держатель контейнера, на котором расположен датчик.
Датчик может быть расположен на внешней стороне держателя контейнера для контакта с кожной тканью кисти руки пользователя, когда она удерживает держатель контейнера.
Датчик может быть расположен на ручке держателя контейнера.
Устройство может содержать браслет, на котором расположен датчик.
Датчик может быть расположен на внешней части браслета для контакта с кожной тканью пользователя при ношении браслета.
Устройство может содержать молокоотсос, при этом молокоотсос может быть выполнен с возможностью изменения своего режима работы в ответ на получение сигнала от сенсорного блока.
Согласно другому аспекту изобретения предложен способ управления работой молокоотсоса, содержащий распознавание физиологической реакции пользователя молокоотсосом, при этом реакция распознается из части тела пользователя, отличной от молочной железы пользователя; а также инициирование изменения работы молокоотсоса в зависимости от распознанной физиологической реакции.
Распознавание физиологической реакции может происходить, когда воронка молокоотсоса расположена вплотную к молочной железе пользователя молокоотсосом.
Способ может содержать распознавание состояния релаксации пользователя.
Изменение работы молокоотсоса может происходить из режима прилива грудного молока в режим сцеживания грудного молока.
Изменение работы молокоотсоса может происходить из релаксационного режима в режим прилива грудного молока.
Изменение работы молокоотсоса может происходить из режима прилива грудного молока в релаксационный режим.
Изменение работы молокоотсоса может происходить из нейтрального режима в релаксационный режим.
Изменение работы может выполняться в ответ на распознавание рефлекса поступления молока.
Изменение работы может выполняться в ответ на распознавание расслабленного состояния пользователя.
Изменение работы может выполняться в ответ на распознавание напряженного состояния пользователя.
Способ может содержать распознавание упомянутой реакции по кожной ткани пользователя молокоотсосом.
Кожная ткань может представлять собой кожную ткань кисти руки, запястья или стопы пользователя молокоотсосом.
Физиологическая реакция может представлять собой гальваническую реакцию кожи.
Способ может дополнительно содержать изменение режима работы молокоотсоса.
Эти и другие аспекты изобретения станут понятны из нижеописанных вариантов осуществления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На Фигуре 1 показан молокоотсос, имеющий воронку, присоединенную к контейнеру посредством соединительной трубки.
На Фигуре 2 показана схема молокоотсоса, представленного на Фигуре 1. В соединительной трубке показаны приводимая в движение диафрагма и клапан, предназначенные для изменения внутреннего объема молокоотсоса.
На Фигуре 3 показана блок-схема сенсорного блока, соединенного с молокоотсосом коммуникационным проводом.
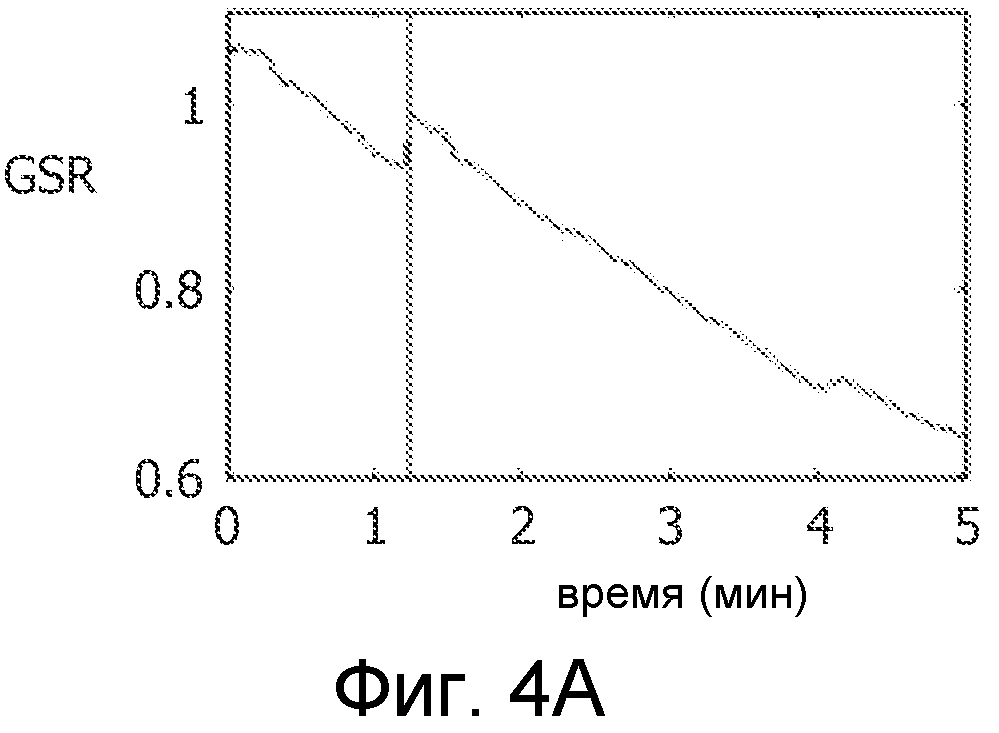
На Фигурах 4A-4D показаны графики, отражающие временную зависимость гальванической реакции кожи до, во время и после проявления рефлекса поступления молока.
На Фигуре 5 показана идентификация пика в гальванической реакции кожи пользователя молокоотсосом с помощью компьютерной программы.
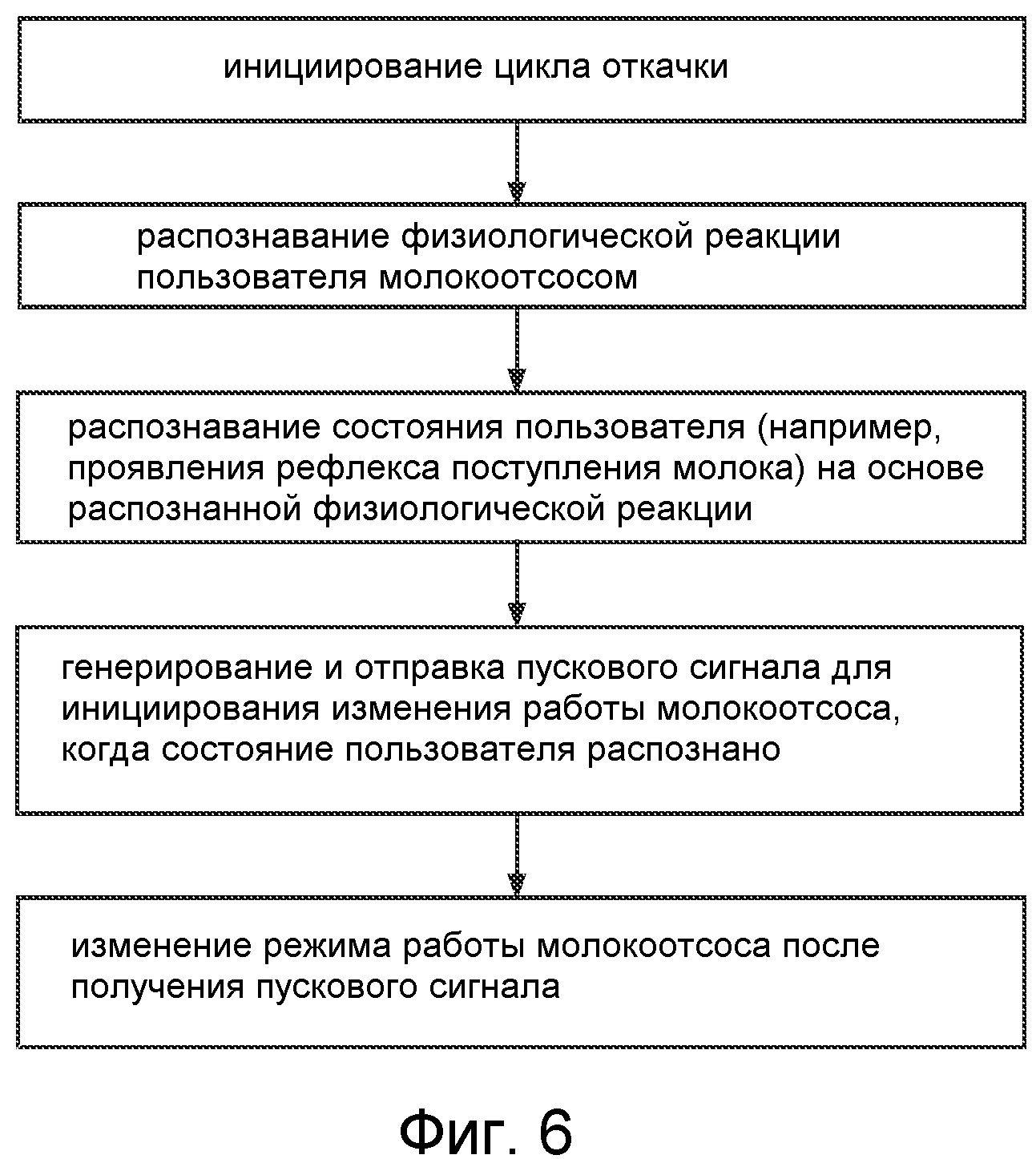
На Фигуре 6 показана блок-схема последовательности операций для ряда событий, которые могут произойти при изменении режима работы молокоотсоса в зависимости от распознанной физиологической реакции пользователя молокоотсосом.
На Фигуре 7 показана перчатка, содержащая сенсорный блок для распознавания физиологической реакции пользователя молокоотсосом.
На Фигуре 8 показан удерживающий блок для распознавания физиологической реакции пользователя молокоотсосом. Удерживающий блок поддерживает контейнер молокоотсоса.
На Фигуре 9 показан браслет для запястья или лодыжки, предназначенный для распознавания физиологической реакции пользователя молокоотсосом.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Варианты осуществления изобретения далее будут описаны со ссылкой на прилагаемые чертежи.
Как показано на Фигуре 1, молокоотсос 100 содержит воронку 110 и контейнер 120. Воронка 110 и контейнер 120 соединены с помощью соединительной трубки 130, которая может иметь, по существу, трубчатую форму.
Как можно видеть на Фигуре 1, воронка 110 содержит входной участок 111 и выходной участок 112. Входной участок 111 может иметь форму полого усеченного конуса, так чтобы его было удобно поместить на молочную железу женщины для сбора молока, сцеживаемого из соска молочной железы. Выходной участок 112 может иметь форму непроницаемой для текучей среды выходной трубки, которая присоединена к соединительной трубке 130, чтобы молоко, сцеженное из молочной железы, могло поступать по каналу от входного участка 111 воронки 110 по направлению к контейнеру 120.
Соединительная трубка 130 обеспечивает непроницаемый для текучей среды проход между воронкой 110 и контейнером 120, чтобы без потерь переместить сцеженное из молочной железы молоко в контейнер 120. Контейнер 120 может содержать любой непроницаемый для текучей среды контейнер, пригодный для содержания грудного молока, например, соответствующий пластиковый контейнер. Входной канал 121 контейнера 120 может быть присоединен к соединительной трубке 130 посредством винтовой посадки, чтобы не допустить нежелательного отсоединения контейнера 120 от соединительной трубки 130 в процессе эксплуатации молокоотсоса 100. Использование соединения по механизму винтовой посадки позволяет при необходимости отделить контейнер 120 от соединительной трубки 130, например, для того, чтобы слить грудное молоко из контейнера 120.
Аналогичное соединение по механизму винтовой посадки может быть обеспечено между соединительной трубкой 130 и выходным участком 112 воронки 110. Однако воронка 110 и соединительная трубка 130 по альтернативному варианту могут быть выполнены в виде единого целого, так что соединительная трубка 130 содержит часть воронки 110. Например, воронка 110 и соединительная трубка 130 могут содержать единую отформованную деталь из пластика, которая привинчивается непосредственно к входному каналу 121 контейнера 120. Это показано на Фигуре 1.
Соединительная трубка 130 может содержать диафрагму 140, которая может приводиться в действие для изменения внутреннего объема соединительной трубки 130. Внутренний объем соединительной трубки 130 не включает в себя внутренний объем воронки 110 и содержит внутренний объем, определяемый стенками соединительной трубки 130, активируемой диафрагмой 140 и клапаном 131 (который рассматривается ниже), расположенным на границе между соединительной трубкой 130 и входным каналом 121 контейнера. В примере, показанном на Фигуре 2, диафрагма 140 образует «крышу» соединительной трубки 130. Приведение в движение диафрагмы 140 в верхнем направлении увеличивает внутренний объем соединительной трубки 130, в то время как приведение в движение диафрагмы 140 в нижнем направлении уменьшает внутренний объем соединительной трубки 130. Приведение в движение диафрагмы 140 проиллюстрировано на Фигуре 2 стрелками, показывающими движение вверх и вниз, а также предельными верхним и нижним положениями диафрагмы 140, показанными точками. Следует понимать, что быстрое увеличение внутреннего объема соединительной трубки 130 приводит к уменьшению давления воздуха внутри молокоотсоса 100, что приводит к поджатию входного участка 111 воронки 110 к кожной ткани молочной железы. В соединительной трубке 130 клапан 131 может располагаться, примыкая к входному каналу 121 контейнера 120, чтобы создать уплотнение в канале для текучей среды между соединительной трубкой 130 и контейнером 120. Клапан 131 выполнен с возможностью закрытия, когда диафрагма 140 приводится в движение в верхнем направлении для снижения давления воздуха внутри соединительной трубки 130. Это показано стрелкой на Фигуре 2. Следует понимать, что путем изолирования воздуха внутри контейнера 120 от воздуха внутри воронки 110, клапан 131 служит для увеличения разности между наружным давлением воздуха и внутренним давлением воздуха, вызванной приведением в движение диафрагмы 140, и тем самым приводит к более надежному поджатию входного канала 111 воронки 110 к ткани молочной железы.
Диафрагма 140 может быть соединена с приводом 150, выполненным с возможностью перемещения диафрагмы 140 в вышеупомянутых направлениях вверх-вниз, тем самым соответственно увеличивая и уменьшая внутренний объем соединительной трубки 130. Привод 150 может содержать электродвигатель 150, расположенный на молокоотсосе 100, например, в головном блоке 151, расположенном непосредственно над соединительной трубкой 130. Это позволяет электродвигателю 150 быть соединенным с диафрагмой 140, как будет рассмотрено ниже. Электродвигатель 150 может приводиться в действие от источника 160 питания, такого как комплект 160 батарей, расположенных в головном блоке 151, примыкая к электродвигателю 150. Согласно альтернативному варианту электродвигатель 150 может получать питание от электрической сети, например с использованием силового провода для соединения электродвигателя 150 с сетевым источником питания через соответствующий трансформаторный блок.
Электродвигатель 150 может быть соединен с приводным механизмом 170, содержащим рычаг 171, выполненный с возможностью приведения в движение диафрагмы 140 для изменения внутреннего объема молокоотсоса 100. Например, рычаг 171 может содержать концевой участок, выполненный с возможностью создания замковой конструкции между рычагом 171 и штуцером 141 на верхней поверхности диафрагмы 140. Когда электродвигатель 150 приводится в действие, приводной механизм 170 может заставить рычаг 171 совершать продольные возвратно-поступательные перемещения в пределах соединительной трубки 130, так чтобы приводить диафрагму 140 в движение верх и вниз, тем самым вызывая соответственно увеличение и уменьшение внутреннего объема соединительной трубки 130.
Как говорилось ранее, когда входной канал 111 воронки 110 расположен вплотную к кожной ткани молочной железы женщины, снижение внутреннего давления воздуха в молокоотсосе 100, вызванное приведением в движение диафрагмы 140, приводит к тому, что воронка 110 поджимается к кожной ткани молочной железы, а клапан 131 в соединительной трубке 130 закрывается. Как только клапан 131 закрывается, дальнейшее приведение в движение диафрагмы 140 для снижения давления воздуха внутри воронки 110 приводит к втягиванию ткани молочной железы во входной канал 111 воронки. Давление воздуха внутри воронки 110 может быть снова увеличено путем приведения в движение диафрагмы 140 в обратном направлении для уменьшения внутреннего объема соединительной трубки 130, позволяя тем самым ткани молочной железы вернуться к нормальной форме.
Может быть инициирован цикл, в котором электродвигатель 150 управляет повторяющимся возвратно-поступательными продольными перемещениями рычага 171 для приведения диафрагмы 140 в движение вверх-вниз внутри соединительной трубки 130. В последующем рассмотрении один полный цикл будет означать перемещение диафрагмы 140 из начального положения в верхнее положение, далее в нижнее положение, а затем обратно в начальное положение. В течение цикла давление воздуха внутри воронки 110 будет непрерывно изменяться, тем самым заставляя ткань молочной железы, расположенную вплотную к воронке 110, неоднократно перемещаться во входной канал 111 и из него. Такой цикл может быть использован с целью создания стимулирующего эффекта для молочной железы. Данный цикл может быть оптимизирован для имитации сосательных действий младенца и сцеживания молока в молокоотсос 100 или для оказания помощи в релаксации пользователя молокоотсосом. Об этом подробнее будет сказано ниже.
Частота, с которой диафрагма 140 перемещается вверх-вниз, может быть измерена числом полных циклов, которые диафрагма 140 совершила в течение фиксированного промежутка времени работы молокоотсоса 100. Точно так же амплитуда (от пика до пика), с которой диафрагма 140 совершает перемещения, может быть измерена в виде расстояния между предельными верхним и нижним положениями диафрагмы 140 в ходе определенного цикла. Эти положения не обязательно соответствуют предельным положениям диафрагмы 140, показанным на Фигуре 2. Например, предельные верхнее и нижнее положения диафрагмы 140 в течение любого конкретного цикла могут быть соответственно ниже или выше предельных положений, показанных на Фигуре 2. Изменение либо частоты, либо амплитуды, с которой диафрагма 140 приводится в движение приводным механизмом 170, может изменять стимулирующий эффект, оказываемый на молочную железу молокоотсосом 100. Это позволяет подобрать стимулирующий эффект, оказываемый молокоотсосом 100, для конкретного пользователя молокоотсосом 100 путем управления входным сигналом, подаваемым на электродвигатель 150, управляющий перемещением диафрагмы 140. Стимулирующий эффект также может быть оптимизирован с целью имитации различных стадий естественного сосательного процесса, а также для оказания помощи в релаксации пользователя молокоотсосом 100.
Молокоотсос 100 может работать в различных режимах стимуляции и может быть выполнен с возможностью переключения между этими режимами в ответ на распознавание одной или нескольких физиологических реакций пользователя молокоотсосом 100. Например, один режим работы может содержать режим прилива грудного молока, при котором частота и амплитуда цикла перемещения диафрагмы оптимизированы так, чтобы спровоцировать MER-рефлекс, в то время как другой режим работы может содержать режим сцеживания грудного молока, при котором частота и амплитуда цикла перемещения диафрагмы оптимизированы так, чтобы способствовать непрерывному выделению молока из соска после проявления MER-рефлекса. Другой режим работы может содержать релаксационный режим, при котором частота и амплитуда цикла перемещения диафрагмы оптимизированы так, чтобы обеспечить релаксационный эффект для кожной ткани пользователя, тем самым способствуя проявлению MER-рефлекса и/или способствуя сцеживанию молока. Следующий режим работы может содержать нейтральный режим, при котором диафрагма 140 бездействует или частота и амплитуда цикла перемещения диафрагмы таковы, чтобы обеспечить относительно медленное, слабо выраженное отсасывающее действие. Молокоотсос 100 может быть выполнен с возможностью переключения с первого из любых рабочих режимов, описанных выше, на второй из любых иных вышеописанных рабочих режимов в ответ на распознавание физиологической реакции пользователя молокоотсосом 100. Как будет показано ниже, переключение между рабочими режимами может содержать, например, переключение с режима прилива грудного молока на режим сцеживания грудного молока в ответ на получение пускового сигнала, указывающего, что MER-рефлекс проявился. Переключение между различными рабочими режимами согласно альтернативному варианту может содержать переключение с нейтрального режима или режима прилива грудного молока на релаксационный режим, либо с релаксационного режима на режим прилива грудного молока или режим сцеживания грудного молока. Специалисту в данной области техники ясно, что хотя различия между различными режимами стимуляции описаны здесь в терминах различий в частоте и амплитуде цикла перемещения диафрагмы, переход между первым и вторым режимами может дополнительно или альтернативно предполагать регулирование других параметров молокоотсоса 100. Например, молокоотсос 100 может быть оборудован массажными подкладками на внутренней поверхности входного канала 111 воронки 110, выполненными с возможностью массажа кожной ткани молочной железы в процессе эксплуатации молокоотсоса 100. Массажный эффект, создаваемый массажными подкладками, может варьироваться в зависимости от режима работы, например, чтобы способствовать проявлению рефлекса поступления молока (режим прилива грудного молока), непрерывного сцеживания молока (режим сцеживания грудного молока) или для релаксации пользователя (релаксационный режим).
Как показано на Фигуре 3, сенсорный блок 200, расположенный отдельно и на удалении от воронки 110 молокоотсоса 100, может быть выполнен с возможностью распознавания физиологической реакции пользователя молокоотсосом 100 и определения состояния пользователя на основе распознанной реакции. Например, сенсорный блок 200 может быть выполнен с возможностью распознавания рефлекса поступления молока (MER) в молочной железе пользователя молокоотсосом 100. Сенсорный блок 200 может быть выполнен с возможностью генерирования пускового сигнала для изменения рабочего режима молокоотсоса 100 с первого из рабочих режимов, описанных выше, на второй рабочий режим, в ответ на распознавание состояния пользователя. Сенсорный блок 200, например, может быть выполнен с возможностью генерирования пускового сигнала для изменения рабочего режима молокоотсоса 100 с режима прилива грудного молока на режим сцеживания грудного молока, если сенсорный блок 200 распознал MER-рефлекс. Сенсорный блок 200 может быть выполнен с возможностью генерирования пускового сигнала для изменения рабочего режима молокоотсоса 100 с режима прилива грудного молока или нейтрального режима на релаксационный режим, если сенсорный блок 200 распознал, что пользователь молокоотсосом 100 пребывает в напряженном состоянии. Сенсорный блок 200 может быть выполнен с возможностью переключения рабочего режима молокоотсоса с релаксационного режима на режим прилива грудного молока, если сенсорный блок 200 распознал, что пользователь молокоотсосом 100 пребывает в расслабленном состоянии.
Молокоотсос 100 может быть выполнен так, что различные рабочие режимы могут функционировать либо по одному, либо совместно синхронным образом. Например, релаксационный режим может работать вместе с режимом прилива грудного молока.
Понятие «физиологическая реакция» в настоящем описании включает в себя любое измерение, считывание или изменение физиологического состояния пользователя молокоотсосом 100. Физиологические реакции кожной ткани пользователя могут распознаваться молокоотсосом 100. Сенсорный блок 200 может быть выполнен с возможностью распознавания физиологических реакций из части тела пользователя, отличной от ткани молочной железы пользователя. В одном примере распознавание того, проявился ли MER-рефлекс, достигается путем сравнения распознанных физиологических реакций с хранящимися физиологическими реакциями, которые известны как указывающие на MER-рефлекс. Распознавание напряженного или расслабленного состояния пользователя, либо распознавание любого другого состояния пользователя, может достигаться тем же способом, т.е. путем сравнения распознанных физиологических реакций с хранящимися физиологическими реакциями, которые известны как указывающие на стресс. Согласно альтернативному варианту распознавание состояния может достигаться с использованием компьютерной модели, например с применением соответствующего алгоритма, для анализа сигналов с датчиков 210 и для поиска событий, указывающих на определенные состояния. Такие события, например, могут содержать пики и провалы в сигналах с датчика 210 определенного типа. Пример этому рассмотрен ниже при обсуждении Фигур 4A-4D. Хранящиеся физиологические реакции и/или компьютерная модель могут храниться в запоминающем устройстве 230 сенсорного блока 200, таком как соответствующее полупроводниковое запоминающее устройство. Сенсорный блок 200 может быть выполнен с возможностью генерирования и отправки вышеуказанного пускового сигнала на молокоотсос 100, после того как распознал состояние, например MER-рефлекс или напряженное/расслабленное состояние пользователя. Пусковой сигнал может генерироваться, когда физиологические реакции, распознанные сенсорным блоком 200, лежат в заданных пределах сохраненных физиологических реакций, указывающих на MER-рефлекс, напряженное состояние пользователя молокоотсосом 100 или расслабленное состояние пользователя молокоотсосом 100. Заданные пределы могут храниться в запоминающем устройстве 230.
Сравнение между распознанными и хранящимися физиологическими реакциями и/или реализация компьютерной модели могут выполняться в управляющем блоке 220, как подробнее описано ниже. Молокоотсос 100 может быть выполнен с возможностью реагирования на получение пускового сигнала путем переключения режима своей работы с первого рабочего режима на второй рабочий режим, как описано выше, например, путем изменения частоты и/или амплитуды циклического движения диафрагмы 140.
Сенсорный блок 200 содержит по меньшей мере один физиологический датчик 210. Например, сенсорный блок 200 может содержать физиологический датчик 210, содержащий датчик электродермальной активности, выполненный с возможностью контакта с кожной тканью пользователя молокоотсосом 100, когда молокоотсос 100 находится в эксплуатации. Датчик 210 электродермальной активности мажет содержать пару электродов, выполненных, например, с возможностью измерения электрического сопротивления кожной ткани, с которой электроды соприкасаются. Датчик 210 электродермальной активности, таким образом, может использоваться для детектирования гальванической реакции кожи (GSR) пользователя молокоотсосом 100, как описано ниже. Сенсорный блок 200 может дополнительно или альтернативно содержать физиологические датчики 210 других типов, например кардиореспираторный датчик 210, который может быть использован для детектирования пульса, температуры тела, частоты дыхания или кровяного давления пользователя, либо для снятия электрокардиограммы (ECG). Физиологический датчик 210 иного типа может представлять собой датчик соматомоторной активности, который может быть выполнен с возможностью получения электромиограмм или электроокулограмм, либо с возможностью детектирования изменений размера зрачка пользователя, частоты мигательных движений и/или продолжительности мигательных движений. Физиологический датчик 210 еще одного типа может представлять собой эндокринный датчик 210, который может быть выполнен с возможностью измерения уровня окситоцина в организме пользователя. Оборудование для снятия таких измерений хорошо известно и подробно рассматриваться не будет.
Сенсорный блок 200 может дополнительно содержать управляющий блок 220, который связан с каждым из физиологических датчиков 210 и выполнен с возможностью приема сигналов с датчиков 210, указывающих на физиологические реакции организма пользователя. Например, управляющий блок 220 может быть электрически соединен с каждым из датчиков 210 посредством электрических проводов, проходящих между управляющим блоком 220 и датчиками 210, которые обычно передают сигналы с датчиков 210 на управляющий блок 220. Управляющий блок 220 может быть выполнен с возможностью анализа сигналов, полученных с датчиков 210, и определения одной или нескольких физиологических реакций пользователя молокоотсосом 100. Например, как показано на Фигуре 3, управляющий блок 220 может быть выполнен с возможностью распознавания электродермальных реакций, например гальванической реакции кожи (GSR), по результатам анализа электрического потенциала на участках расположения электродов. Управляющий блок 220 дополнительно или альтернативно может быть выполнен с возможностью распознавания физиологической реакции другого типа, например температуры тела, кровяного давления, пульса, вариабельности частоты сердечных сокращений, состояния релаксации пользователя, изменений размера зрачка и частоты и/или продолжительности мигательных движений глаза пользователя. Однако следует понимать, что физиологические реакции согласно альтернативному варианту могут распознаваться непосредственно физиологическими датчиками 210 и поступать напрямую в управляющий блок 220.
Как обсуждалось ранее, управляющий блок 220 может быть выполнен с возможностью сравнения физиологических реакций, определенных с помощью датчиков 210, с хранящимися физиологическими реакциями, которые могут указывать на проявление MER-рефлекса, напряженное состояние пользователя молокоотсосом 100, расслабленное состояние пользователя молокоотсосом 100 или иное состояние. Дополнительно или альтернативно управляющий блок 220 может быть выполнен с возможностью ввода сигналов с датчиков 210 в компьютерную модель, которая реализуется управляющим блоком 220 для определения событий, указывающих на конкретное состояние (например, MER-рефлекс, расслабленное/напряженное состояние) пользователя молокоотсосом 100. Хранящиеся реакции и/или компьютерная модель могут быть предварительно загружены в запоминающее устройство 230 сенсорного блока 200, при этом управляющий блок 220 имеет к ним доступ в процессе работы молокоотсоса 100. При необходимости сенсорный блок 200 может быть выполнен с возможностью выбора одной из множества различных сохраненных реакций для использования при распознавании напряженного или расслабленного состояния пользователя молокоотсосом 100. Выбор сохраненной реакции сенсорным блоком 200 может зависеть от пользователя молокоотсосом 100. Например, выбор может быть основан на физических признаках пользователя, таких как рост и вес, которые могут вводиться в сенсорный блок 200 с помощью средства для ввода данных. Сенсорный блок 200 может также содержать средство для «точной настройки» сохраненных реакций, чтобы сделать их характерными для регулярного пользователя молокоотсосом 100. Такая точная настройка может равным образом применяться для компьютерной модели, например путем регулировки параметров модели на основе физических признаков пользователя. В одном примере сенсорный блок 200 может быть выполнен с возможностью хранения среднего времени откачки, которое требуется для провоцирования MER-рефлекса для конкретного пользователя, и использования хранимого времени для помощи в распознавании MER-рефлекса.
Управляющий блок 220 может быть выполнен с возможностью сравнения распознанных реакций с сохраненными реакциями и генерирования пускового сигнала, указывающего на определенное состояние пользователя молокоотсосом, когда распознанные реакции находятся в заданных пределах сохраненных реакций для этого состояния. Альтернативно или дополнительно может быть использована вышеописанная компьютерная модель.
Как говорилось ранее, пусковой сигнал, например, может указывать, что имело место проявления MER-рефлекса или что пользователь молокоотсосом 100 пребывает в напряженном или расслабленном состоянии. На Фигурах 4A-4D показана GSR-реакция, полученная на кожной ткани запястья женщины, сцеживающей молоко (при использовании молокоотсоса 100), замеренная с использованием вышеописанного сенсорного блока 200. На каждой из Фигур 4A-4D показана GSR-реакция как функция времени, прошедшего с момента начала сцеживания молока. Вертикальные линии на каждом из графиков указывают момент времени, в который женщина заметила проявление MER-рефлекса. Как можно видеть, вертикальные линии весьма точно соответствуют пикам GSR-реакции. Эти пики принимаются за указатели MER-рефлекса, а значит, могут быть использованы сенсорным блоком 200 для распознавания момента проявления MER-рефлекса. Напряженное или расслабленное состояние могут распознаваться соответствующим способом, т.е. с помощью анализа GSR-кривой для идентификации точек или трендов, указывающих на напряженное или расслабленное состояние. Например, как показано на Фигурах 4A-4D, тенденция к снижению GSR-кривой после появления MER-рефлекса указывает, что пользователь молокоотсосом 100 становится более расслабленным по мере продолжения сцеживания молока. Тот же способ может быть использован для идентификации состояний пользователя по физиологической реакции другого типа, например посредством пульса, температуры тела или вариабельности частоты сердечных сокращений пользователя.
Как показано на Фигуре 5, алгоритм, реализуемый компьютером, или соответствующая программа, загруженные в сенсорный блок 200, будучи реализуемыми процессором в управляющем блоке 220, могут быть выполнены с возможностью детектирования пиков или других точек, указывающих на конкретное состояние пользователя в GSR-данных, или иной физиологической реакции, а также генерирования пускового сигнала. Пик, распознанный таким алгоритмом, реализуемым компьютером, показан кружком на Фигуре 5, распознавая тем самым проявление MER-рефлекса у пользователя молокоотсосом 100.
Пусковой сигнал может содержать электрический сигнал, который посылается в молокоотсос 100 по электрическому проводу 180, соединяющему управляющий блок 220 сенсорного блока 200 с управляющим блоком 152 молокоотсоса 100. Согласно альтернативному варианту пусковой сигнал может отправляться в управляющий блок 152 молокоотсоса 100 беспроводным способом с использованием известного протокола связи, такого как Bluetooth. Управляющий блок 152 молокоотсоса 100 может располагаться в головном блоке 151 и может быть выполнен с возможностью подачи входных сигналов на привод 150 и/или приводной механизм 170 для изменения режима работы молокоотсоса 100 между различными рабочими режимами.
Например, как показано на Фигуре 6, пользователь молокоотсосом 100 может инициировать цикл откачки молокоотсоса 100 путем нажатия кнопки «start» на головном блоке 151. Управляющий блок 152 молокоотсоса 100 может быть выполнен с возможностью, в ответ на нажатие кнопки «start», приведения молокоотсоса 100 в работу в первом режиме путем подачи входного сигнала на привод 150, чтобы подать команду приводу 150 на начало перемещения диафрагмы 140 вверх и вниз. Этот первый режим может содержать режим прилива грудного молока, при котором частота цикла перемещения диафрагмы может быть относительно высокой, а амплитуда цикла перемещения диафрагмы может быть относительно низкой. Это приводит к относительно быстрому, но мягкому откачивающему действию, которому подвергается ткань молочной железы, обладающему возможностью создания стимулирующего эффекта, точно имитирующего начальные стадии естественного кормления с целью спровоцировать MER-рефлекс. Проявление MER-рефлекса распознается управляющим блоком 220 сенсорного блока 200, который генерирует и отправляет пусковой сигнал в управляющий блок 152 молокоотсоса 100, указывающий на то, что MER-рефлекс проявился. Управляющий блок 152 в молокоотсосе 100 может быть выполнен с возможностью, получив пусковой сигнал, переключить работу молокоотсоса 100 на второй режим, например, содержащий режим сцеживания молока, путем подачи команды на переключение на привод 150 и/или приводной механизм 170. Привод 150 и/или приводной механизм 170 выполнены с возможностью, получив сигнал на переключение, изменить режим работы молокоотсоса 100 на второй режим. Например, если второй режим содержит режим сцеживания, частота цикла перемещения диафрагмы может быть снижена, в то время как амплитуда цикла перемещения диафрагмы может быть увеличена. Это приводит к более медленному и более сильному откачивающему действию, которому подвергается ткань молочной железы. Получаемый в результате стимулирующий эффект способствует выделению молока из соска молочной железы.
Автоматический переход между первым режимом и вторым режимом означает, что пользователю молокоотсосом 100 не требуется обеспечивать какой-либо пользовательский ввод вслед за первоначальной активацией откачивающего действия. Молокоотсос 100 может работать в автоматическом режиме до тех пор, пока из молочной железы пользователя не будет сцежено требуемое количество молока. Такое положение вещей является желательным, поскольку известно, что MER-рефлекс с наибольшей степенью вероятности проявляется, когда пользователь молокоотсосом 100 пребывает в полностью расслабленном состоянии, а это вряд ли соответствует тому, чтобы пользователь сконцентрировался на управлении молокоотсосом 100.
В варианте примера, описанного в предшествующих двух параграфах, первый режим может содержать релаксационный режим, при котором один или несколько дополнительных световых источников и/или акустических элементов в сенсорном блоке 200 соответственно могут быть выполнены с возможностью излучения мягкого света и подачи успокаивающих звуков пользователю молокоотсосом 100. Сенсорный блок 200 может быть выполнен с возможностью изменения излучения света и подачи звуков в ответ на физиологические состояния, распознанные у пользователя. Если управляющий блок 220 распознал, что пользователь молокоотсосом 100 пребывает в расслабленном состоянии, сенсорный блок 200 может сгенерировать и отправить пусковой сигнал в управляющий блок 152 молокоотсоса 100, указывающий, что пользователь пребывает в расслабленном состоянии. Управляющий блок 152 молокоотсоса 100 может быть выполнен с возможностью, получив пусковой сигнал, переключить режим работы молокоотсоса 100 на второй режим, например, содержащий прилив грудного молока, путем подачи команды на переключение на привод 150 и/или приводной механизм 170.
Привод 150 и/или приводной механизм 170 выполнены с возможностью, получив сигнал на переключение, изменить режим работы молокоотсоса 100 на второй режим.
Ниже описан ряд конкретных примеров сенсорного блока 200. В данных примерах, когда воронка 110 молокоотсоса расположена вплотную к кожной ткани молочной железы пользователя в процессе эксплуатации молокоотсоса 100 по меньшей мере один датчик 210 сенсорного блока 200 выполнен с возможностью контакта с кожной тканью части тела пользователя, отличной от ткани молочной железы. Конкретнее, в примерах, представленных ниже по меньшей мере один датчик 210 выполнен с возможностью контакта с кожной тканью кисти руки или запястья пользователя молокоотсосом 100 для распознавания физиологических реакций пользователя. Однако датчик 210 альтернативно может быть выполнен с возможностью контакта с кожной тканью лодыжки или ступни пользователя молокоотсосом 100 для распознавания физиологической реакции. Предпочтительно такие физиологические замеры проводят на кожной ткани кистей рук, запястий или ступней, поскольку именно на этих частях тела наилучшим образом проявляется электропроводность кожи, которую можно измерить для определения GSR-реакции и, в свою очередь, для определения состояния пользователя, например в отношении MER-рефлекса. Эти части тела также находятся на удалении от области груди и, соответственно, выделения молока и могут быть благополучно использованы для распознавания проявления MER-рефлекса без необходимости в стерилизации сенсорных приборов перед их применением. Однако следует понимать, что не является принципиально важным, чтобы сенсорный блок содержал датчик 210, выполненный с возможностью контакта с кожной тканью одной из вышеупомянутых частей тела. Это также относится к случаю, когда для распознавания состояния пользователя используются реакции иного типа, отличные от электродермальных реакций.
Как показано на Фигуре 7, сенсорный блок 200 может содержаться в перчатке 300, которую должен носить пользователь молокоотсосом 100 в процессе его эксплуатации. По меньшей мере, один физиологический датчик 210 может располагаться так, чтобы оставаться в контакте с кожной тканью кисти руки пользователя, когда на руку надета перчатка 300. Например, физиологический датчик 210 может располагаться, по меньшей мере, в одном из множества отделений 310 для пальцев в перчатке 300. Кроме того, физиологические датчики 210 могут быть обеспечены в одном или нескольких других отделениях 310 для пальцев перчатки 300, например, в каждом из отделений 310 для пальцев. Физиологические датчики 210 могут также быть обеспечены во внутренней части области 320 ладони перчатки 300.
Управляющий блок 220 может располагаться либо внутри, либо снаружи перчатки 300. Например, управляющий блок 220 может быть закреплен на внутренней или наружной поверхности верхней стороны перчатки 300, в то время как физиологические датчики 210 закреплены на внутренней поверхности нижней стороны, или стороны ладони, перчатки 300, чтобы контактировать с кожной тканью кисти руки, вставленной в перчатку. Управляющий блок 220 может быть электрически соединен с каждым из датчиков посредством электрических проводов, проходящих через ткань перчатки 300.
Как показано на Фигуре 8, сенсорный блок 200 вместо этого может содержаться в удерживающем блоке 400 для молокоотсоса 100. Для ясности удерживающий блок 400 на Фигуре 8 представлен как блок, содержащий только контейнер 120 молокоотсоса 100. Однако следует понимать, что удерживающий блок 400 способен служить опорой всему молокоотсосу 100, когда молокоотсос 100 находится в завинченном виде. Удерживающий блок 400, например, может содержать кожух 410, имеющий боковую стенку 411, выполненную с возможностью прилегания к окружной поверхности контейнера 120 молокоотсоса 100, а также основание 412, выполненное с возможностью служить опорой основанию контейнера 120. Кожух 410 может дополнительно содержать ручку, чтобы позволить пользователю молокоотсосом 100 захватить удерживающий блок 400 и тем самым поддерживать молокоотсос 100 вплотную к молочной железе в процессе сцеживания молока.
Как показано на Фигуре 8, по меньшей мере один физиологический датчик 210 может быть расположен на наружной поверхности удерживающего блока 400, например, на одной или нескольких боковых стенках 411, основании 412 или ручке, так чтобы датчик 210 контактировал с кожной тканью кисти руки пользователя, когда пользователь захватывает удерживающий блок 400. В одном примере датчики 210 обеспечены на боковой стенке 411, основании 412 и ручке кожуха 410. Датчики 210 могут располагаться в областях углублений в наружной части кожуха 410, выполненных с возможностью соответствия пальцам взрослой женщины. Это способствует размещению пальцев пользователя молокоотсосом 100 непосредственно поверх датчиков 210, тем самым обеспечивая хороший контакт между кожной тканью кисти руки пользователя и датчиками 210. Управляющий блок 220 может быть расположен в любом удобном месте на удерживающем блоке 400, например, на боковой стенке 411 кожуха 410.
Как показано на Фигуре 9, сенсорный блок 200 может содержаться в повязке для запястья или браслете 500, которые пользователь молокоотсосом 100 должен носить в процессе его использования. По меньшей мере, один физиологический датчик 210 может располагаться так, чтобы контактировать с кожной тканью кисти руки или запястья пользователя, когда пользователь носит повязку или браслет 500. Если повязку или браслет 500 носят вокруг лодыжки или нижней части ноги по меньшей мере один физиологический датчик 210 может быть расположен так, чтобы контактировать с кожной тканью лодыжки или нижней части ноги пользователя.
Как показано на Фигуре 9, по меньшей мере один физиологический датчик 210 может быть расположен на внутренней поверхности 510 повязки или браслета 500, так чтобы иметь возможность контактировать с кожной тканью пользователя, когда пользователь носит повязку или браслет 500. Управляющий блок 220 может быть расположен либо на внутренней поверхности 510, либо на наружной поверхности 520 браслета 500. Согласно альтернативному варианту управляющий блок 220 может быть встроен в повязку или браслет 500, чтобы предохранить его от повреждения. Управляющий блок 220 может быть электрически соединен с каждым из датчиков посредством электрических проводов, проходящих насквозь или через материал повязки или браслета 500.
Согласно альтернативному варианту сенсорный блок 200 может содержаться в самом контейнере 120 молокоотсоса 100. Например, по меньшей мере один физиологический датчик 210 может располагаться на наружной поверхности контейнера 120, например на одной или нескольких боковых стенках или основании контейнера 120, так чтобы датчик 210 контактировал с кожной тканью кисти руки пользователя, когда пользователь захватывает контейнер 120 в процессе использования молокоотсоса 100. В одном примере датчики 210 расположены на каждой из боковых стенок и на основании. Датчики 210 могут располагаться в областях углублений в наружной части контейнера 120, выполненных с возможностью соответствия пальцам взрослой женщины. Это способствует размещению пальцев пользователя молокоотсосом 100 непосредственно поверх датчиков 210, тем самым обеспечивая хороший контакт между кожной тканью кисти руки пользователя и датчиками 210. Управляющий блок 220 может быть расположен в любом удобном месте на контейнере 120, например, на боковой стенке контейнера 120.
Хотя изобретение было представлено и подробно описано на чертежах и в предшествующем описании, такое представление и описание следует рассматривать как иллюстративные или приведенные в качестве примера, а не ограничивающие; изобретение не ограничивается раскрытыми вариантами осуществления. Например, изобретение может быть реализовано в варианте осуществления, в котором сенсорный блок расположен в носке и выполнен с возможностью распознавания физиологических реакций на кожной ткани стопы, либо в повязке на запястье или лодыжке, будучи выполненным с возможностью распознавания физиологических реакций на кожной ткани запястья или лодыжки.
Специалисты в данной области техники смогут предложить и реализовать разновидности раскрытых вариантов осуществления, изучив чертежи, описание и прилагаемую формулу изобретения. В формуле изобретения термин «содержащий» не исключает существования других элементов или этапов, а единственное число не исключает множественного числа. Одиночный процессор или иной блок может выполнять функции нескольких элементов, приведенных в формуле изобретения. Тот факт, что определенные характеристики приведены во взаимоотличных зависимых пунктах формулы изобретения, не указывает на то, что сочетание этих характеристик не может быть использовано с выгодой. Компьютерная программа может храниться/быть распределенной на соответствующем носителе, таком как оптический носитель информации или твердотельный носитель, поставляемый совместно с другим аппаратным обеспечением или в виде его части, но может быть также распределена в других формах, например через интернет либо другие проводные или беспроводные телекоммуникационные системы. Ни одна из ссылочных позиций в формуле изобретения не должна рассматриваться как ограничивающая объем притязаний.
Реферат
Группа изобретений относится к медицине. Молокоотсос содержит воронку и привод. Сенсорный блок имеет датчик распознавания физиологической реакции пользователя, связанный с блоком управления. Блок управления выполнен с возможностью сравнения распознанных физиологических реакций с хранящимися в запоминающем устройстве физиологическими реакциями, указывающими на проявление рефлекса поступления молока, и подачи на привод сигнала, инициирующего изменение работы молокоотсоса в зависимости от распознанного рефлекса поступления молока. Сенсорный блок расположен на удалении от области выделения молока и воронки молокоотсоса. Раскрыт способ управления работой молокоотсоса. Изобретения обеспечивают распознавание поступления молока для управления стимуляцией молочной железы. 2 н. и 9 з.п. ф-лы, 9 ил.
Формула
распознают физиологическую реакцию пользователя молокоотсосом, при этом реакцию распознают из части тела пользователя, отличной от молочной железы пользователя;
распознают рефлекс поступления молока на основе сравнения распознанных физиологических реакций с физиологическими реакциями, указывающими рефлекс поступления молока и хранящимися в запоминающем устройстве; и
инициируют изменение работы молокоотсоса в зависимости от распознанного рефлекса поступления молока.
Документы, цитированные в отчёте о поиске
Грудная накладка
Комментарии