Способы и система для своевременного автоматического останова двигателя транспортного средства - RU2632391C2
Код документа: RU2632391C2
Чертежи




Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее описание относится к способам и системам для управления запуском и остановом двигателя транспортного средства. Подход может быть особенно полезным для двигателей, которые приводят в движение транспортное средство во время многообразия условий вождения.
УРОВЕНЬ ТЕХНИКИ
Автоматические останов и запуск могут сберегать топливо и снижать выбросы транспортного средства. Кроме того, бремя специального запрашивания, чтобы двигатель транспортного средства останавливался и запускался, может быть снято с водителя транспортного средства, так что внимание водителя может быть сосредоточено скорее на вождении транспортного средства, чем дополнительных задачах неоднократного запуска и останова двигателя. Однако, простой останов и запуск двигателя посредством таймера, или когда транспортное средство начинает останавливаться, может не полностью использовать с выгодой способность транспортного средства с остановом/запуском сберегать топливо. Дополнительно, если двигатель часто останавливается и немедленно повторно запускается, признак останова/запуска может доставлять неудобство водителю и может не сберегать топливо настолько, насколько требуется.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретатели в материалах настоящей заявки осознали вышеупомянутые недостатки и разработали способ для управления транспортным средством, содержащий: запрещение автоматического останова двигателя транспортного средства в ответ на условия дорожного движения, принятые с бортовой камеры.
В настоящей заявке предложен способ для эксплуатации транспортного средства, содержащий этап, на котором запрещают автоматический останов двигателя транспортного средства в ответ на условия дорожного движения, принятые от бортовой камеры.
Дополнительный аспект дополнительно содержит то, что бортовая камера выдает данные, представляющие форму непереключающегося дорожного знака, и то, что автоматический останов двигателя запрещают в ответ на форму непереключающегося дорожного знака.
Другой дополнительный аспект дополнительно содержит то, что бортовая камера дополнительно выдает данные, представляющие цвет непереключающегося дорожного знака, и то, что автоматический останов двигателя запрещают в ответ на цвет непереключающегося дорожного знака.
В еще одном дополнительном аспекте непереключающийся дорожный знак является знаком кругового движения.
В еще одном дополнительном аспекте непереключающийся дорожный знак является знаком «уступите дорогу».
В еще одном дополнительном аспекте бортовая камера является тепловизионной камерой, и автоматический останов двигателя запрещают в ответ на тепловое распределение объекта, наблюдаемого ближайшим к бортовой камере, и форму непереключающегося дорожного знака.
В еще одном дополнительном аспекте тепловое распределение является признаком человека.
Также предложен способ для эксплуатации транспортного средства, содержащий этап, на котором запрещают автоматический останов двигателя транспортного средства в ответ на условия дорожного движения, принятые от устройства считывания дорожного движения, причем условия дорожного движения включают в себя количество времени после переключения с одного цвета светофора на другой цвет светофора.
Дополнительный аспект дополнительно содержит то, что запрещение автоматического останова двигателя транспортного средства дополнительно выполняют в ответ на указание объекта на пути транспортного средства и указатель поворота транспортного средства.
В другом дополнительном аспекте указатель поворота является указателем правого поворота, и указание объекта является указанием остановленного объекта.
В еще одном дополнительном аспекте переключение с одного цвета светофора на другой цвет светофора является переключением с желтого на красный, с желтого на зеленый, с красного на желтый или с красного на зеленый.
Другой дополнительный аспект дополнительно содержит то, что устройство считывания дорожного движения является бортовой камерой.
Еще один другой дополнительный аспект дополнительно содержит то, что устройство считывания дорожного движения активизируют в ответ на замедление транспортного средства, низкую скорость транспортного средства или остановку транспортного средства.
В еще одном дополнительном аспекте условия дорожного движения дополнительно включают в себя непереключающийся дорожный знак.
Кроме того, раскрыта система для управления транспортным средством, содержащая: двигатель; устройство считывания дорожного движения; и контроллер, включающий в себя компьютерную программу, хранимую на невременном носителе, включающем в себя выполняемые команды для запрещения автоматического останова двигателя транспортного средства в ответ на условия дорожного движения, принятые от бортовой камеры и устройства выявления расстояния.
В дополнительном аспекте устройство выявления расстояния определяет расстояние между транспортным средством и объектом посредством одного или более из группы, содержащей радар, лазер и сонар.
В другом дополнительном аспекте раскрытая система включает в себя дополнительные выполняемые команды для сравнения данных, представляющих форму непереключающегося дорожного знака, с данными, хранимыми на невременном носителе, и где автоматический останов двигателя запрещен в ответ на совпадение между данными, представляющими форму непереключающегося дорожного знака, и данными, хранимыми на невременном носителе.
В еще одном дополнительном аспекте раскрытая система включает в себя дополнительные выполняемые команды для определения времени переключения между одним или более световыми сигналами светофора.
В еще одном дополнительном аспекте раскрытая система включает в себя дополнительные выполняемые команды для запрещения автоматического останова двигателя в ответ на количество времени с момента времени переключения между двумя или более световыми сигналами светофора.
В еще одном другом дополнительном аспекте переключение между двумя или более световыми сигналами светофора является переключением между желтым и красным световыми сигналами.
Посредством запрещения останова двигателя в ответ на входные данные с бортовой камеры, может быть возможным предоставлять двигателю возможность продолжать работать во время условий, где останов двигателя может давать небольшие экономии топлива. Например, выходной сигнал с бортовой камеры и выходной сигнал с устройства выявления дальности могут быть полезны для определения, что водитель транспортного средства останавливается вследствие непереключающегося уличного знака (например, металлического уличного знака, который не изменяет рабочее состояние). Поскольку водитель не должен ожидать, чтобы уличный знак изменил состояние, автоматический останов двигателя может запрещаться, так чтобы двигатель не останавливался, а затем не перезапускался немедленно. Запрещение автоматического останова двигателя может снижать ухудшение характеристик стартерного электродвигателя. Кроме того, запрещение автоматического останова двигателя может снижать потребление топлива, когда время остановки двигателя, в ином случае, было бы коротким по длительности.
Настоящее описание может давать несколько преимуществ. Например, подход может снижать ухудшение характеристик стартера. Кроме того, способ может снижать потребление топлива во время условий, где двигатель останавливался и повторно запускался бы вскоре после этого. Дополнительно, способ может улучшать впечатление от вождения транспортного средства для водителя, останавливая двигатель более своевременно.
Вышеприведенные преимущества и другие преимущества и признаки настоящего описания будут без труда очевидны из последующего Подробного описания при восприятии отдельно или в сочетании с прилагаемыми чертежами.
Должно быть понятно, что сущность изобретения, приведенная выше, предоставлена для знакомства с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании. Она не предполагается для идентификации ключевых или существенных признаков заявленного объекта изобретения, объем которого однозначно определен формулой изобретения, которая сопровождает подробное описание. Более того, заявленный объект изобретения не ограничен реализациями, которые устраняют какие-либо недостатки, отмеченные выше или в любой части этого раскрытия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Преимущества, описанные в материалах настоящей заявки, будут полнее понятны по прочтению примера, указанного в материалах настоящей заявки в качестве Подробного описания при восприятии отдельно или со ссылкой на чертежи, где:
фиг.1 - схематический чертеж двигателя;
фиг.2 показывает примерную схему соединений системы двигателя;
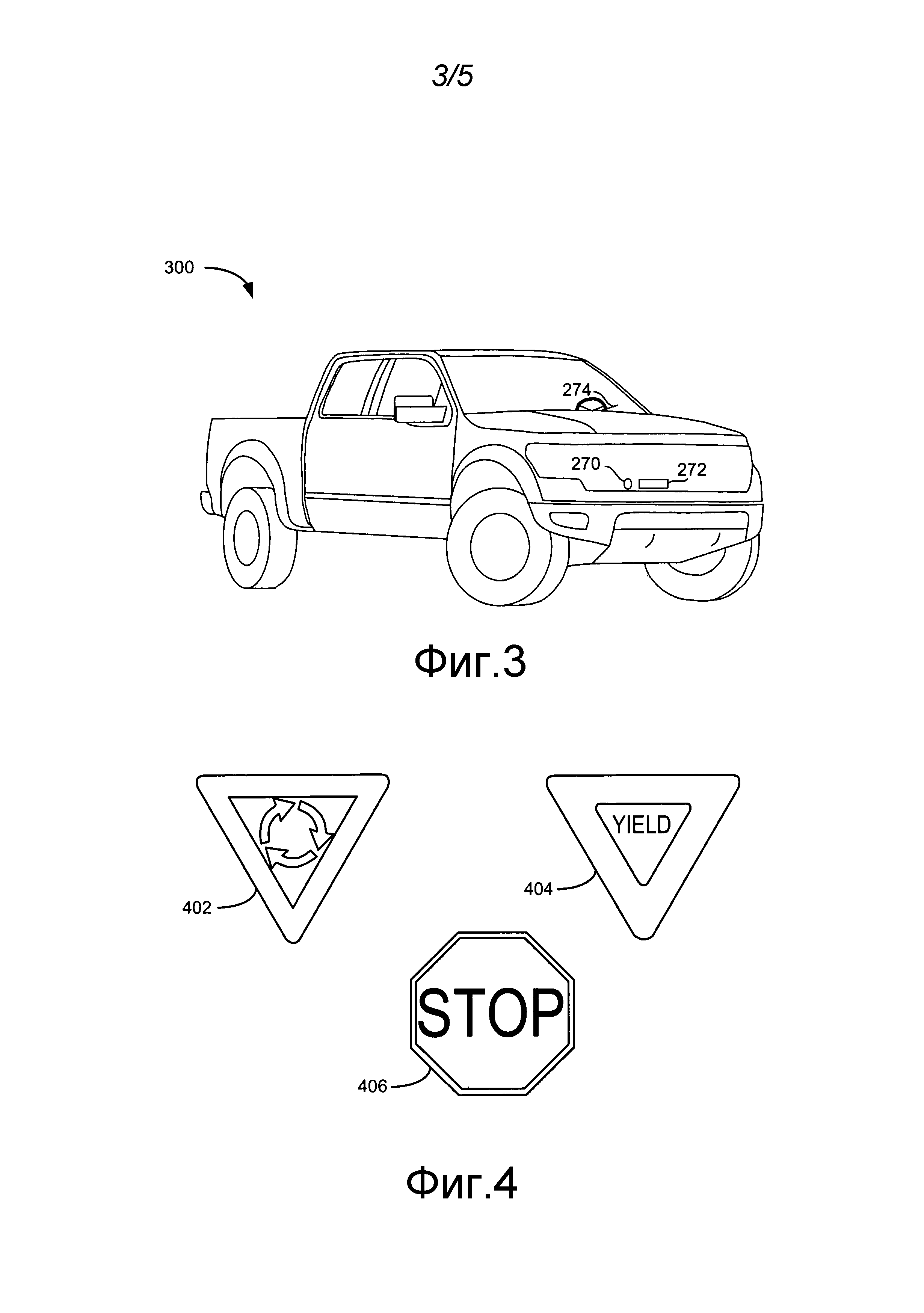
фиг.3 показывает примерное транспортное средство;
фиг.4 показывает примерные непереключающиеся знаки; и
фиг.5 и 6 показывают блок-схему последовательности операций способа для запрещения или разрешения автоматического останова двигателя.
ПОДРОБНОЕ ОПИСАНИЕ
Настоящее описание имеет отношение к своевременному останову двигателя транспортного средства. Способ и система могут лучше определять условия, где двигатель может останавливаться для сбережения топлива, и условия, где может быть лучше, чтобы двигатель продолжал работать. В одном из неограничивающих примеров, двигатель может быть сконфигурирован, как проиллюстрировано на фиг.1. Кроме того, двигатель может быть частью силовой передачи, как проиллюстрировано на фиг.2. Двигатель и силовая передача могут быть установлены в транспортном средстве, как показанное на фиг.3. Система может идентифицировать непереключающиеся указатели дорожного движения, такие как дорожные знаки, показанные на фиг.4. Фиг.5 и 6 показывают блок-схему последовательности операций способа для запрещения автоматического останова двигателя, показанного на фиг.1 и 2.
Со ссылкой на фиг.1, двигатель 10 внутреннего сгорания, содержащий множество цилиндров, один цилиндр которого показан на фиг.1, управляется электронным контроллером 12 двигателя. Двигатель 10 включает в себя камеру 30 сгорания и стенки 32 цилиндра с поршнем 36, расположенным в них и присоединенным к коленчатому валу 40. Камера 30 сгорания показана сообщающейся с впускным коллектором 44 и выпускным коллектором 48 через соответственный впускной клапан 52 и выпускной клапан 54. Каждый впускной клапан и выпускной клапан может приводиться в действие кулачком 51 впускного клапана и кулачком 53 выпускного клапана. В качестве альтернативы, один или более из впускных и выпускных клапанов могут приводиться в действие электромеханически управляемым узлом катушки и якоря клапана. Положение кулачка 51 впускного клапана может определяться датчиком 55 кулачка впускного клапана. Положение кулачка 53 выпускного клапана может определяться датчиком 57 кулачка выпускного клапана.
Топливная форсунка 66 показана расположенной для впрыска топлива непосредственно в цилиндр 30, что известно специалистам в данной области техники как непосредственный впрыск. В качестве альтернативы, топливо может впрыскиваться во впускной канал, что известно специалистам в данной области техники в качестве впрыска во впускной канал. Топливная форсунка 66 выдает жидкое топливо пропорционально длительности импульса сигнала FPW из контроллера 12. Топливо подается на топливную форсунку 66 топливной системой (не показана), включающей в себя топливный бак, топливный насос и направляющую-распределитель для топлива (не показана). Топливная форсунка 66 питается рабочим током из формирователя 68, который реагирует на действие контроллера 12. В дополнение, впускной коллектор 44 показан сообщающимся с необязательным электронным дросселем 62, который настраивает положение дроссельной заслонки 64 для регулирования потока воздуха из воздухозаборника 42 во впускной коллектор 44. В одном из примеров, может использоваться система непосредственного впрыска низкого давления, где давление топлива может подниматься до приблизительно 20-30 бар. В качестве альтернативы, двухкаскадная топливная система высокого давления может использоваться для формирования более высоких давлений топлива.
Система 88 зажигания без распределителя выдает искру зажигания в камеру 30 сгорания через свечу 92 зажигания в ответ на действие контроллера 12. Универсальный датчик 126 кислорода выхлопных газов (UEGO) показан присоединенным к выпускному коллектору 48 выше по потоку от каталитического нейтрализатора 70 отработавших газов. В качестве альтернативы, двухрежимный датчик кислорода выхлопных газов может использоваться вместо датчика 126 UEGO.
Стартер 96 двигателя зацепляется с маховиком 98, который присоединен к коленчатому валу 40, чтобы вращать коленчатый вал 40. Стартер 96 двигателя может приводиться в действие посредством сигнала из контроллера 12. В некоторых примерах, стартер 96 двигателя может приводиться в действие без ввода от водителя специального входного сигнала останова/пуска двигателя (например, выключателя с ключом или нажимной кнопки). Скорее, стартер 96 двигателя может приводиться в действие, когда водитель отпускает тормозную педаль или нажимает педаль 130 акселератора (например, устройство ввода, которое не имеет единственную цель останова и/или запуска двигателя). Таким образом, двигатель 10 может автоматически запускаться посредством стартера 96 двигателя для сбережения топлива.
Нейтрализатор 70 отработавших газов, в одном из примеров, включает в себя многочисленные брикеты катализатора. В еще одном примере, могут использоваться многочисленные устройства снижения токсичности отработавших газов, каждое с многочисленными брикетами. Нейтрализатор 70 отработавших газов, в одном из примеров, может быть катализатором трехкомпонентного типа.
Контроллер 12 показан на фиг.1 в качестве традиционного микрокомпьютера, включающего в себя: микропроцессорный блок 102, порты 104 ввода/вывода, постоянное запоминающее устройство 106, оперативное запоминающее устройство 108, дежурную память 110 и традиционную шину данных. Контроллер 12 показан принимающим различные сигналы от датчиков, присоединенных к двигателю 10, в дополнение к тем сигналам, которые обсуждены ранее, в том числе: температуру охлаждающей жидкости двигателя (ECT) от датчика 112 температуры, присоединенного к патрубку 114 охлаждения; датчика 134 положения, присоединенного к педали 130 акселератора для считывания силы, приложенной ступней 132; измерение давления во впускном коллекторе двигателя (MAP) от датчика 122 давления, присоединенного к впускному коллектору 44; датчика положения двигателя от датчика 118 на эффекте Холла, считывающего положение коленчатого вала 40; измерение массы воздуха, поступающего в двигатель, от датчика 120; и измерение положения дросселя от датчика 58. Барометрическое давление также может считываться (датчик не показан) для обработки контроллером 12. В предпочтительном аспекте настоящего описания, датчик 118 положения двигателя вырабатывает предопределенное количество равномерно разнесенных импульсов каждый оборот коленчатого вала, по которому может определяться частота вращения двигателя (RPM, в оборотах в минуту).
В некоторых примерах, двигатель может быть присоединен к системе электродвигателя/аккумуляторной батареи в транспортном средстве с гибридным приводом. Транспортное средство с гибридным приводом может иметь параллельную конфигурацию, последовательную конфигурацию, либо их варианты или комбинации. Кроме того, в некоторых вариантах осуществления, могут применяться другие конфигурации двигателя, например, дизельный двигатель.
Во время работы, каждый цилиндр в двигателе 10 типично подвергается четырехтактному циклу: цикл включает в себя такт впуска, такт сжатия, такт расширения и такт выпуска. В течение такта впуска, обычно, выпускной клапан 54 закрывается, а впускной клапан 52 открывается. Воздух вовлекается в камеру 30 сгорания через впускной коллектор 44, поршень 36 перемещается к дну цилиндра, с тем, чтобы увеличить объем внутри камеры 30 сгорания. Положение, в котором поршень 36 находится около дна цилиндра и в конце своего хода (например, когда камера 30 сгорания находится при своем наибольшем объеме), типично указывается специалистами в данной области техники ссылкой как нижняя мертвая точка (НМТ, BDC). Во время такта сжатия, впускной клапан 52 и выпускной клапан 54 закрыты. Поршень 36 перемещается к головке блока цилиндров для того, чтобы сжать воздух внутри камеры 30 сгорания. Точка, в которой поршень 36 находится в конце своего хода и самой близкой к головке блока цилиндров (например, когда камера 30 сгорания находится при своем наименьшем объеме), типично указывается специалистами в данной области техники в качестве верхней мертвой точки (ВМТ, TDC). В процессе, в дальнейшем называемом впрыск, топливо вводится в камеру сгорания. В процессе, в дальнейшем называемом воспламенение, впрыснутое топливо воспламеняется известным средством воспламенения, таким как свеча 92 зажигания, приводя к сгоранию. Во время такта расширения, расширяющиеся газы толкают поршень 36 обратно в НМТ. Коленчатый вал 40 преобразует перемещение поршня в крутящий момент вращающегося вала. В заключение, во время такта выпуска, выпускной клапан 54 открывается, чтобы выпускать подвергнутую сгоранию топливо-воздушную смесь в выпускной коллектор 48, и поршень возвращается в ВМТ. Отметим, что вышеприведенное показано просто в качестве примера, и что установки момента открывания и/или закрывания впускного и выпускного клапанов могут меняться так, чтобы давать положительные или отрицательное перекрытие клапанов, позднее закрывание впускного клапана, или различные другие примеры.
Фиг.2 – структурная схема силовой передачи 200 транспортного средства. Силовая передача 200 может быть механизирована двигателем 10. Двигатель 10 может запускаться пусковой системой (не показана). Кроме того, двигатель 10 может вырабатывать или настраивать крутящий момент посредством исполнительного механизма 204 крутящего момента, такого как топливная форсунка, дроссель, и т.д.
Крутящий момент на выходе двигателя может передаваться на гидротрансформатор 206, чтобы приводить в движение автоматическую трансмиссию 208, через входной вал 236 трансмиссии. Кроме того, одна или более муфт могут приводиться в зацепление, в том числе, муфта 210 переднего хода и зубчатые муфты 230 для приведения в движение транспортного средства. В одном из примеров, гидротрансформатор может указываться ссылкой как компонент трансмиссии. Кроме того, трансмиссия 208 может включать в себя множество зубчатых муфт 230, которые могут приводиться в зацепление по необходимости, чтобы активировать множество постоянных передаточных чисел. Выходная мощность гидротрансформатора, в свою очередь, может регулироваться муфтой 212 блокировки гидротрансформатора. Например, когда муфта 212 блокировки гидротрансформатора полностью расцеплена, гидротрансформатор 206 передает крутящий момент двигателя на автоматическую трансмиссию 208 посредством переноса текучей среды между турбиной гидротрансформатора и насосным колесом гидротрансформатора, тем самым, давая возможность умножения крутящего момента. В противоположность, когда муфта 212 блокировки гидротрансформатора полностью зацеплена, крутящий момент на выходе двигателя передается непосредственно через муфту гидротрансформатора на входной вал 236 трансмиссии 208. В качестве альтернативы, муфта 212 блокировки гидротрансформатора может зацепляться частично, тем самым, давая возможность настраиваться величине крутящего момента, передаваемого на трансмиссию. Контроллер может быть выполнен с возможностью настраивать величину крутящего момента, передаваемого гидротрансформатором 212, посредством настройки муфты блокировки гидротрансформатора в ответ на различные условия эксплуатации двигателя или на основании, основанного на водителе, запроса режима работы двигателя.
Крутящий момент на выходе из автоматической трансмиссии 208, в свою очередь, может передаваться на колеса 216, чтобы приводить транспортное средство в движение, через выходной вал 234 трансмиссии. Более точно, автоматическая трансмиссия 208 может передавать входной вращающий момент на входном валу 236 в ответ на состояние перемещения транспортного средства перед передачей выходного вращающего момента на колеса.
Кроме того, сила трения может прикладываться к колесам 216 посредством приведения в действие колесных тормозов 218. В одном из примеров, колесные тормоза 218 могут приводиться в действие в ответ на нажимание водителем, его ступней, на тормозную педаль (не показана). Таким же образом, сила трения может снижаться в отношении колес 216 посредством отведения колесных тормозов 218 в ответ на отпускание водителем своей ступни с тормозной педали. Кроме того, тормоза транспортного средства могут прикладывать силу трения к колесам 216 в качестве части процедуры автоматического останова двигателя.
Механический масляный насос 214 может находиться в сообщении по текучей среде с автоматической трансмиссией 208, чтобы выдавать гидравлическое давление для приведения в действие различных муфт, таких как муфта 210 переднего хода и/или муфта 212 блокировки гидротрансформатора. Механический масляный насос 214, например, может приводиться в действие в соответствии с гидротрансформатором 212, и может приводиться в движение вращением входного вала двигателя или трансмиссии. Таким образом, гидравлическое давление, вырабатываемое в механическом масляном насосе 214, может повышаться по мере того, как увеличивается число оборотов двигателя, и может снижаться по мере того, как уменьшается число оборотов двигателя. Электрический масляный насос 220, также находящийся в сообщении по текучей среде с автоматической трансмиссией, но работающий независимо от движущей силы двигателя 10 или трансмиссии 208, может быть предусмотрен для добавления гидравлического давления механического масляного насоса 214. Электрический масляный насос 220 может приводиться в движение электродвигателем (не показан), на который может подаваться электрическая мощность, например, аккумуляторной батареей (не показана).
Входная частота вращения трансмиссии может контролироваться посредством датчика 240 частоты вращения входного вала трансмиссии. Выходная частота вращения трансмиссии может контролироваться посредством датчика 244 частоты вращения выходного вала трансмиссии. В некоторых примерах, акселерометр 250 может предоставлять данные ускорения транспортного средства в контроллер 12, так что муфты 210 и 230 могут управляться посредством клапанов 280-286 во время запуска двигателя и начала движения транспортного средства.
Контроллер 12 может быть выполнен с возможностью принимать входные сигналы от двигателя 10, как подробнее показано на фиг.1, и соответствующим образом управлять крутящим моментом на выходе двигателя и/или работой гидротрансформатора, трансмиссии, муфт и/или тормозов. В качестве одного из примеров, крутящий момент на выходном валу может управляться посредством настройки комбинации установки момента зажигания, длительности импульса топлива, установки момента импульса топлива и/или заряда воздуха посредством управления открыванием дросселя и/или установкой фаз клапанного распределения, подъемом клапана и давлением наддува для двигателей с нагнетателем и турбонагнетателем. В случае дизельного двигателя, контроллер 12 может управлять крутящим моментом на выходном валу двигателя, управляя комбинацией длительности импульса, установки момента импульса топлива и заряда воздуха. Во всех случаях, управление двигателем может выполняться на основе цилиндр за цилиндром, чтобы регулировать крутящий момент на выходном валу двигателя.
Контроллер 12 также принимает данные от бортовой камеры 270, устройства 272 определения расстояния и устройства 274 ввода указателя сигнала поворота. Камера 270 может быть инфракрасной камерой или камерой детектирования красного, зеленого, синего (RGB). В некоторых примерах, могут быть предусмотрены как инфракрасная камера, так и камера RGB. Устройство 272 определения расстояния может быть лазерным, радарным или акустическим устройством определения дальности. В некоторых примерах, камера 270 и устройство определения расстояния могут иметь процессоры, которые обмениваются информацией с контроллером 12, и которые выдают условия, обнаруженные посредством устройства 272 выявления дальности и камерой 270. Например, камера 270 может давать указание, что конкретное устройство регулирования движения было обнаружено, и состояние устройства регулирования движения. В одном из примеров, камера 270 дает указание обнаружения непереключающегося дорожного знака (например, знак «движение без остановки запрещено»), а также указание светофора, цвета светового сигнала, и когда световой сигнал изменяет состояние или цвет. В других примерах, камера 270 выдает данные формирования теплового изображения в контроллер 12. Камера 270 может выдавать данные, представляющие тепловой градиент объекта, так чтобы объект мог определяться как одушевленный или неодушевленный. Подобным образом, устройство выявления дальности может давать указание обнаружения объекта, а также расстояния до объекта.
Когда условия остановки на холостом ходу удовлетворены, контроллер 12 может инициировать остановку двигателя посредством отключения топлива и зажигания у двигателя. Кроме того, для поддержания величины кручения в трансмиссии, контроллер может заземлять вращающиеся элементы трансмиссии 208 в картер трансмиссии 238 и тем самым, на раму транспортного средства. Контроллер может приводить в зацепление одну или более муфт трансмиссии, таких как муфта 210 переднего хода, и блокировать зацепленную муфту(ы) трансмиссии по отношению к картеру трансмиссии и раме транспортного средства через клапаны 280-286 с электрическим приводом. Клапаны 280-286 могут быть клапаны управления модулированной длительностью импульсов, которые регулируют давление масла, втекающего в муфту 210 и зубчатые муфты 230. В одном из примеров, во время остановки двигателя, гидравлическое давление для модуляции муфты может выдаваться посредством задействования электрического масляного насоса 220, если достаточное гидравлическое давление не может обеспечиваться механическим масляным насосом 214.
Давление колесных тормозов также может настраиваться во время отключения двигателя на основании давления муфты, чтобы содействовать удерживания трансмиссии наряду с уменьшением крутящего момента, передаваемого через колеса. Более точно, посредством применения колесных тормозов наряду с блокировкой одной или более зацепленных муфт трансмиссии, противодействующие силы могут прикладываться к трансмиссии и, следовательно, к приводу на ведущие колеса, тем самым, сохраняя промежуточную передачу в активном зацеплении, и потенциальную энергию кручения в зубчатой передаче трансмиссии, не двигая колеса. В одном из примеров, давление колесных тормозов может настраиваться, чтобы координировать применение колесных тормозов с блокировкой зацепленной муфты трансмиссии во время остановки двигателя. По существу, посредством настройки давления колесных тормозов и давления муфты, может настраиваться величина кручения, удерживаемая в трансмиссии, когда двигатель остановлен.
Когда удовлетворены условия запуска двигателя, и/или водитель транспортного средства желает начать движение транспортного средства, контроллер 12 может повторно активировать двигатель, возобновляя сгорание в цилиндрах. Чтобы начать движение транспортного средства, трансмиссия 208 может разблокироваться, и колесные тормоза 218 могут отпускаться, чтобы вернуть крутящий момент на ведущие колеса 216. Давление муфты может настраиваться, чтобы разблокировать трансмиссию, с помощью клапанов 280-286 наряду с тем, что давление колесных тормозов может настраиваться для координирования отпускания тормозов при разблокировании трансмиссии и пуском в ход транспортного средства.
Далее, со ссылкой на фиг.3, показано примерное транспортное средство. Транспортное средство 300 включает в себя камеру 270, устройство 272 выявления дальности и устройство 274 ввода указателя сигнала поворота. Камера 270 и устройство 272 выявления дальности находятся в положениях возле передней части транспортного средства 300 и ориентированы в переднем направлении движения, так чтобы могли определяться объекты на пути транспортного средства. Камера 270 и устройство выявления дальности показаны в неограничивающих местоположениях, которые не подразумеваются для ограничения объема или применения настоящего описания.
Далее, со ссылкой на фиг.4, показаны несколько примеров непереключающихся дорожных знаков. Знак 402 представляет один из примеров знака кругового движения, используемого для указания наличия кругового движения, чтобы указывать водителю, что следует уступать дорогу движению транспорта в пределах кругового движения. Знак 404 представляет знак «уступите дорогу» для сигнализации водителю, что следует уступать дорогу движению транспорта, где останов транспортного средства не требуется. Знак 406 представляет собой знак «движение без остановки запрещено», чтобы сигнализировать водителю, что следует остановить транспортное средство. Данные, представляющие знаки 402-406, могут храниться в памяти контроллера и использоваться в качестве основы для опознавания, является ли транспортное средство приближающимся к непереключающемуся дорожному знаку. В некоторых вариантах осуществления, данные, представляющие формы непереключающихся знаков, могут храниться в памяти. В других примерах, формы и цвета непереключающихся знаков могут храниться в памяти.
Далее, со ссылкой на фиг.5 и 6, показан способ для определения, когда следует запрещать автоматический останов двигателя. Автоматический останов двигателя может содержать останов двигателя без водителя, использующего устройство ввода, которое имеет единственную функцию останова/запуска двигателя. Например, контроллер может решать остановить двигатель, когда скорость транспортного средства является нулевой, и когда ступня водителя применяет тормозную педаль транспортного средства. Способ по фиг.5 и 6 может применяться вместе с другими условиями эксплуатации двигателя и транспортного средства, такими как скорость транспортного средства, ступня водителя на тормозе, для определения, запрещен или нет автоматический останов двигателя. Таким образом, способ по фиг.5 и 6 не является исключающим способ запрещения автоматического останова двигателя. Скорее, способ по фиг.5 и 6 может применяться с другими способами и логикой для определения, когда следует запрещать автоматический останов двигателя.
На 502, способ 500 оценивает, является или нет транспортное средство остановленным, находящимся на низкой скорости или замедляющимся. В одном из примеров, замедление транспортного средства может определяться из текущего контроля скорости транспортного средства. В других примерах, замедление транспортного средства может определяться посредством скорости транспортного средства и применения тормозной педали транспортного средства. Если транспортное средство определено замедляющимся, способ 500 переходит на 504. Иначе, способ 500 переходит на выход. В некоторых примерах, 502 может быть исключен.
На 504, способ 500 активирует бортовую камеру и устройства выявления дальности. Бортовая камера и устройства выявления дальности могут активироваться подачей питания на камеру и устройства выявления дальности. В других примерах, камера и устройство выявления дальности могут активироваться после того, как двигатель запущен, и оставаться активными, в то время как запущен двигатель. Способ 500 переходит на 506 после того, как активированы камера и устройство выявления дальности.
На 506, способ 500 оценивает, находится или нет объект на пути транспортного средства. Присутствие объекта может определяться устройством выявления дальности и/или камерой или комбинацией устройства выявления дальности и камеры. Например, устройство выявления дальности может отправлять сигнал и контролировать возврат сигнала, отраженного от объекта. С другой стороны, камера может сравнивать данные некоторое время спустя захваченных изображений с объектами, хранимыми в памяти, чтобы определять, есть ли объект на пути транспортного средства. Если есть объект на пути транспортного средства, способ 500 переходит на 534. Иначе, способ 500 переходит на 508.
На 508, способ 500 сканирует зону впереди транспортного средства на устройство регулирования движения. Устройство регулирования движения может обнаруживаться посредством внешнего сигнала (например, РЧ или микроволнового сигнала), передаваемого в контроллер. Кроме того, камера может сравнивать обнаруженные объекты с эталонными объектами, хранимыми в памяти контроллера. Например, данные, указывающие непереключающиеся дорожные знаки, могут храниться в памяти, а также данные, представляющие светофоры и другие устройства регулирования движения. Данные, хранимые в памяти, сравниваются с изображением, захваченным через камеру. Если формы и цвета аналогичны, может определяться, что был обнаружен знак «движение без остановки запрещено», знак «уступите дорогу» или знак кругового движения. Способ 500 переходит на 510, в то время как зона на пути транспортного средства или одушевленный объект сканируются касательно устройств регулирования движения.
На 510, способ 500 оценивает, был или нет обнаружен стационарный непереключающийся дорожный знак. Дорожный знак может обнаруживаться, когда данные, хранимые в памяти, по существу совпадают с данными, собранными из бортовой камеры. Если стационарный непереключающийся знак был обнаружен, способ 500 переходит на 512. Иначе, способ 500 переходит на 524.
На 512, способ 500 оценивает, задействован (установлен) или нет обнаруженный непереключающийся дорожный знак посредством человека. В одном из примеров, зона вокруг знака сканируется, чтобы определять, есть ли тепловой градиент возле знака, который является признаком одушевленного объекта. Тепловой градиент может давать указание вручную задействованного знака на месте строительства дороги. Вручную задействованный знак может быть указывающим на длительные задержки между передвижением транспортных средств. Следовательно, может быть желательным предоставлять автоматически останавливаемому двигателю возможность останавливаться, когда обнаружен человек, задействующий знак. Если присутствует тепловой градиент, указывающий на одушевленный объект, способ 500 переходит на 520. Иначе, способ 500 переходит на 514.
На 514, способ 500 оценивает, является или нет непереключающийся дорожный знак знаком «уступите дорогу». Например, данные, представляющие знак «уступите дорогу», хранимые в памяти, сравниваются с данными, захваченными в изображении с камеры. Если данные, полученные из изображения, снятого камерой, совпадают с данными знака «уступите дорогу», хранимыми в памяти, способ 500 переходит на 522. Иначе, способ 500 переходит на 516.
На 516, способ 500 оценивает, является или нет непереключающийся дорожный знак знаком «движение без остановки запрещено». Например, данные, представляющие знак «движение без остановки запрещено», хранимые в памяти, сравниваются с данными, захваченными в изображении с камеры. Если данные, полученные из изображения, снятого камерой, совпадают с данными знака «движение без остановки запрещено», хранимыми в памяти, способ 500 переходит на 522. Иначе, способ 500 переходит на 518.
На 518, способ 500 оценивает, является или нет непереключающийся дорожный знак знаком кругового движения. Например, данные, представляющие знак кругового движения, хранимые в памяти, сравниваются с данными, захваченными в изображении с камеры. Если данные, полученные из изображения, снятого камерой, совпадают с данными знака кругового движения, хранимыми в памяти, способ 500 переходит на 522. Иначе, способ 500 переходит на 520.
Дополнительная логика, подобная 518, также может быть предусмотрена для других типов непереключающихся знаков. Например, когда обнаружен знак железной дороги, двигателю изначально запрещен автоматический останов, когда останавливается транспортное средство. Однако, если транспортное средство останавливается на более чем предопределенное количество времени, двигателю может быть разрешено автоматически останавливаться. Кроме того, когда дорожный знак обнаружен на перекрестке, и человек выявлен посредством теплового сканирования, двигателю может быть запрещен автоматический останов в течение предопределенного количества времени. Если транспортное средство останавливается на более чем предопределенное количество времени, двигатель может автоматически останавливаться.
На 520, способ 500 разрешает автоматический останов двигателя при наличии условий эксплуатации транспортного средства, иных, чем условия эксплуатации, определенные по камере и устройству выявления дальности. Например, если знак обнаружен, но тип знака неизвестен, двигатель может автоматически останавливаться, когда транспортное средство остановлено на предопределенное количество времени, в то время как применяется тормозная педаль. Способ 500 переходит на выход после того, как двигателю разрешено автоматически останавливаться.
На 522, способ 500 запрещает автоматический останов двигателя в ответ на условия эксплуатации, определенные по бортовой камере и устройству выявления дальности, независимо от других условий эксплуатации, таких как положение тормозной педали. Таким образом, на 522, способ 500 дает двигателю возможность продолжать работать. Способ 500 переходит на выход после того, как запрещен автоматический останов двигателя.
На 524, способ 500 оценивает, обнаружен или нет светофор. В одном из примеров, светофор может обнаруживаться на основании РЧ (радиочастотного, RF) или микроволнового сигнала. В других примерах, светофор может обнаруживаться камерой, сравнивающей захваченное изображение с данными, хранимыми в памяти. Если обнаружен светофор, способ 500 переходит на 525. Иначе, способ 500 переходит на 532.
На 525, способ 500 оценивает, выдал или нет водитель входной сигнал на вход сигнала поворота. В одном из примеров, способ 500 выносит решение, что есть входной сигнал, когда сигнал поворота указывает, что водитель намеревается повернуть направо. В одном из примеров, способ 500 выносит решение, что есть входной сигнал, когда сигнал поворота указывает, что водитель намеревается повернуть направо. Если способ 500 выносит решение, что присутствует сигнал поворота, способ 500 переходит на 522. Иначе, способ 500 переходит на 526.
На 526, способ 500 определяет цвет или состояние светофора. Например, способ 500 определяет, является ли светофор зеленым, желтым или красным. В одном из примеров, камера может определять цвет или состояние светофора посредством выявления данных, представляющих пиксели красного/зеленого/синего. Кроме того, способ 500 может определять интенсивность света с помощью данных, представляющих каждый пиксель RGB (например, двоичное число из 0-255). Таким образом, красный свет может определяться по пикселям красного, зеленый свет может определяться по пикселям зеленого, а желтый свет может определяться посредством комбинации пикселей красного и зеленого. Таким образом, способ 500 оценивает, какие световые сигналы светофора активны и неактивны. Способ 500 переходит на 528 после того, как выявлен световой сигнал светофора.
На 528, способ 500 определяет количество времени после изменения состояния светофора. Каждый раз, когда обнаруженный светофор изменяет состояние, отметка времени может сохраняться в памяти. Кроме того, количество времени между изменениями состояния определяется посредством вычитания времени от последнего изменения состояния светофора до нового изменения состояния светофора. Кроме того еще время после переключений светофора с одного определенного состояния в другое состояние может определяться посредством сохранения отметки времени в переменной, которая представляет состояние светофора. Например, количество времени, которое светофор был зеленым или красным, может определяться посредством подсчета количества времени после переключений светофора с желтого на красный или с красного на зеленый. Способ 500 переходит на 530 после того, как было определено время после изменения состояния светофора.
На 530, способ 500 оценивает, является или нет время после того, как переключился светофор, меньшим, чем пороговое количество времени. В одном из примеров, способ 500 определяет количество времени, которое светофор был красным. Если светофор был красным в течение меньшего, чем пороговое, количества времени, способ 500 переходит на 532. Иначе, способ 500 переходит на 522. Способ 500 разрешает автоматический останов двигателя на 532, как описано на 520.
В некоторых примерах, когда определено, что свет одного цвета является многократно мигающим, способ 500 переходит на 522, и автоматический останов двигателя запрещается. Однако, если транспортное средство остановлено на предопределенное количество времени на мигающем световом сигнале, двигатель может автоматически останавливаться. Например, если световой сигнал является мигающим желтым, красным или зеленым световым сигналом, останов двигателя запрещается. С другой стороны, если световой сигнал переключается с мигающего одним цветом светового сигнала на активированный или подсвечиваемый одним цветом немигающий световой сигнал, двигателю разрешается автоматически останавливаться в зависимости от цвета немигающего светового сигнала. Если немигающий световой сигнал является красным, двигатель может автоматически останавливаться. Если немигающий световой сигнал является зеленым, двигатель может не останавливаться автоматически.
Если светофор содержит попеременно мигающие световые сигналы, двигателю может быть разрешено автоматически останавливаться. Например, если выявлено два красных световых сигнала, которые попеременно мигают (например, при пересечении железной дороги), двигателю может быть разрешено автоматически останавливаться.
Таким образом, когда никакого объекта не обнаружено на пути транспортного средства, двигатель может автоматически останавливаться, когда условия эксплуатации транспортного средства, иные, чем от камеры или детектора дальности, дают возможность останова двигателя. Кроме того, когда обнаружен непереключающийся дорожный знак, автоматический останов двигателя может запрещаться.
На 534, способ 500 определяет расстояние до объекта на пути транспортного средства. В одном из примеров, расстояние до объекта может определяться по количеству времени, которое занимает, чтобы сигнал вернулся на транспортное средство после того, как сигнал отправлен из транспортного средства. Скорость объекта также может определяться по количеству времени, которое занимает, чтобы изменилось расстояние между транспортным средством и объектом. Например, транспортное средство может быть перемещающимся на 100 км/ч, и расстояние между транспортным средством и объектом может иметь значение 200 метров. Если объект остается за 200 метров от транспортного средства, может определяться, что объект является движущимся на одной и той же скорости с транспортным средством. Однако, если расстояние между двумя транспортными средствами увеличивается или уменьшается между интервалами выборки отсчетов, скорость объекта определяется отличной от скорости транспортного средства. Может определяться, что объект неподвижен, если расстояние между объектом и транспортным средством изменяется одинаково со скоростью транспортного средства. Иначе, объект может быть определен движущимся. Например, если объект находится за 500 метров от транспортного средства, и транспортное средство является движущимся на 100 км/ч, может определяться, что объект неподвижен, если расстояние между объектом и транспортным средством уменьшается на 27,77 метров/секунду (например, скорость сближения). Таким образом, объект на пути транспортного средства может определяться движущимся или не движущимся на основании величины скорости, с которой транспортное средство приближается к объекту. Способ 500 переходит на 536 после того, как определены расстояние между транспортным средством и объектом, а также скорость сближения между транспортным средством и объектом.
На 536, способ 500 оценивает, является или нет движущимся объект на пути транспортного средства. В одном из примеров, объект определяется движущимся, если скорость сближения между транспортным средством и объектом является иной, чем скорость транспортного средства. Например, если скорость транспортного средства имеет значение 100 км/ч, а скорость сближения имеет значение 40 м/с, может определяться, что объект является движущимся. Если способ 500 определяет, что объект является движущимся, способ 500 переходит на 538. Иначе, способ 500 переходит на 540.
На 538, способ 500 запрещает автоматический останов двигателя, как описано на 522. Таким образом, если на пути транспортного средства есть движущийся объект, автоматический останов двигателя может запрещаться, так чтобы двигатель не останавливался в течение коротких периодов, когда транспортное средство может останавливаться, а объект на пути транспортного средства является движущимся. Способ 500 переходит на выход после того, как запрещен автоматический останов двигателя.
На 540, способ 500 определяет местоположение транспортного средства. В одном из примеров, местоположение транспортного средства может определяться с помощью глобальной системы определения местоположения (GPS). GPS может выдавать указание в отношении того, является ли транспортное средство эксплуатируемым на автомагистрали или двухполосной дороге. Способ 500 переходит на 542 после того, как определено положение транспортного средства.
На 542, способ 500 оценивает, является или нет транспортное средство движущимся по автомагистрали. В одном из примеров, способ 500 оценивает, является или нет транспортное средство движущимся по автомагистрали, на основании входных данных из GPS. Если способ 500 определяет, что транспортное средство является эксплуатируемым на автомагистрали, способ 500 переходит на 544. Иначе, способ 500 переходит на 550.
На 544, способ 500 оценивает, остановлены или нет окружающие транспортные средства. Положения окружающих транспортных средств могут определяться посредством бортовой камеры, радарных, лазерных или акустических датчиков. Если транспортное средство слева или справа от транспортного средства определено присутствующим в одном временном интервале, а затем, отсутствующим через короткий временной интервал после этого, может определяться, что окружающие транспортные средства являются движущимися. Если способ 500 определяет, что окружающие транспортные средства являются движущимися, способ 500 переходит на 548. Иначе, способ 500 переходит на 546.
На 546, способ 500 разрешает двигателю автоматически останавливаться, как описано на 520. Таким образом, когда транспортное средство находится на автомагистрали, и окружающие транспортные средства определены не движущимися, способ 500 разрешает двигателю автоматически останавливаться согласно выводу о дорожной пробке. Способ 500 переходит на выход после того, как разрешен автоматический останов двигателя.
На 548, способ 500 запрещает автоматический останов двигателя, как описано на 522. Наоборот, способ 500 разрешает автоматический останов двигателя, как описано на 520. Таким образом, автоматический останов двигателя может разрешаться или запрещаться согласно условиям эксплуатации транспортного средства на автомагистрали. Способ 500 переходит на выход после того, как запрещен автоматический останов двигателя.
На 550, способ 500 оценивает, является или нет объект транспортным средством или другим объектом, который имеет неоднородную тепловую сигнатуру. Например, камера может быть тепловизионной камерой, и тепловой градиент объекта может определяться камерой, чтобы определять, имеет объект или нет неоднородную тепловую сигнатуру, которая может быть указывающей на одушевленный объект или на транспортное средство, которое вырабатывает тепло в качестве побочного продукта. Если способ 500 выносит решение, что объект имеет неоднородную тепловую сигнатуру, способ 500 переходит на 554. Иначе, способ 500 переходит на 552.
На 554, способ 500 разрешает автоматический останов двигателя, как описано на 520. Таким образом, когда неподвижное транспортное средство или одушевленный объект обнаружены на пути транспортного средства, когда транспортное средство не находится на автомагистрали, двигатель может автоматически останавливаться. Способ 500 переходит на выход после разрешения двигателю автоматически останавливаться.
На 552, способ 500 разрешает автоматический останов двигателя спустя пороговое количество времени без изменения в состоянии объекта. Например, если объект является стеной в гараже для парковки, двигатель может автоматически останавливаться после того, как истекло пороговое количество времени. Способ 500 переходит на выход после того, как был разрешен автоматический останов двигателя. Таким образом, когда транспортное средство не является перемещающимся по автомагистрали, двигатель транспортного средства может автоматически останавливаться на основании теплового изображения объекта на пути транспортного средства. Способ 500 переходит на выход после запрещения двигателю автоматического останова.
Как будет принято во внимание специалистом в данной области техники, процедуры, описанные на фиг.5-6, могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемая событиями, управляемая прерыванием, многозадачная, многопоточная, и тому подобная. По существу, различные проиллюстрированные этапы или функции могут выполняться в проиллюстрированной последовательности, параллельно, или в некоторых случаях пропускаться. Подобным образом, данный порядок обработки не обязательно требуется для достижения целей, признаков и преимуществ, описанных в материалах настоящей заявки, но приведен для облегчения иллюстрации и описания. Хотя не проиллюстрировано явным образом, специалист в данной области техники будет осознавать, что одни или более из проиллюстрированных этапов или функций могут выполняться неоднократно, в зависимости от конкретной используемой стратегии.
Это завершает описание. Прочтение его специалистами в данной области техники представило бы многие изменения и модификации, не отступая от сущности и объема описания. Например, рядные двигатели I3, I4, I5, V-образные двигатели V6, V8, V10 и V12, работающие на природном газе, бензине, дизельном топливе или альтернативных топливных конфигурациях, могли бы использовать настоящее описание для получения преимущества.
Реферат
Изобретение относится к системе автоматического запуска и останова двигателя транспортного средства. Способ для эксплуатации транспортного средства, выполняемый электронным контроллером, содержит этапы, на которых запрещают автоматический останов двигателя транспортного средства в ответ на условия дорожного движения и автоматически останавливают двигатель в ответ на условия эксплуатации. Условия дорожного движения получают от бортовой камеры транспортного средства. Бортовая камера выдает данные, представляющие форму непереключающегося дорожного знака, и автоматический останов двигателя запрещают в ответ на упомянутую форму. Достигается повышение комфорта управления транспортным средством. 3 н. и 14 з.п. ф-лы, 6 ил.
Комментарии