Выявление погрешности в пределах диапазона датчика давления топлива - RU2684147C1
Код документа: RU2684147C1
Чертежи

















Описание
Область техники, к которой относится изобретение
Настоящее описание, в целом, относится к способам для диагностики погрешности в пределах диапазона датчика давления, расположенного ниже по потоку от топливоподкачивающего насоса в двигателе внутреннего сгорания, и регулирования работы топливной системы в зависимости от результатов диагностики.
Уровень техники и раскрытие сущности изобретения
Двигатели внутреннего сгорания могут содержать топливную систему с топливной рампой для раздачи топлива в одну или несколько топливных форсунок, которые могут представлять собой форсунки непосредственного впрыска и/или форсунки распределенного впрыска. В топливной системе с форсунками непосредственного впрыска топливоподкачивающий насос подает топливо в топливный насос высокого давления, в свою очередь подающий топливо при высоком давлении впрыска в топливную рампу. Топливная рампа соединена с форсунками непосредственного впрыска, впрыскивающими топливо в камеры сгорания двигателя. В топливной системе с распределенным впрыском топливоподкачивающий насос подает топливо при более низком давлении впрыска в топливную рампу. Топливная рампа соединена с форсунками распределенного впрыска, впрыскивающими топливо во впускную систему двигателя выше по потоку от впускных трактов камер сгорания. В системе распределенного впрыска и непосредственного впрыска топлива осуществляют и впрыск топлива во впускной тракт, и непосредственный впрыск топлива.
Независимо от типа топливной системы, работу топливоподкачивающего насоса можно регулировать для выдачи топлива при, по существу, постоянном давлении подачи в процессе, в настоящем описании именуемом «непрерывная эксплуатация насоса» или «эксплуатация в непрерывном режиме», путем подачи напряжения с коэффициентом заполнения 100%, при этом уровень напряжения соответствует необходимому постоянному давлению подачи. Если нужно изменить поток топлива, напряжение можно перевести на другой уровень и поддерживать его неизменным или по существу неизменным на этом другом уровне напряжения (с коэффициентом заполнения 100%), результатом чего являются измененные по существу постоянные скорость топливоподкачивающего насоса и давление подачи. Работу топливоподкачивающего насоса также можно регулировать для создания прерывистых импульсов относительно высокого давления, что в настоящем описании носит название «импульсная эксплуатация насоса» или «эксплуатация в импульсном режиме», в котором коэффициент заполнения напряжения, подаваемого топливоподкачивающему насосу, меньше 100%. Во время импульсной эксплуатации насоса уровень напряжения, подаваемого топливоподкачивающему насосу, может попеременно представлять собой первый, более высокий, уровень и второй, более низкий, уровень, причем второй, более низкий, уровень очень низок (например, чуть выше 0 В). При подаче напряжения первого, более высокого, уровня топливоподкачивающему насосу, скорость топливоподкачивающего насоса высока, поэтому давление подачи топливоподкачивающего насоса является высоким, а при подаче напряжения второго, более низкого, уровня топливоподкачивающему насосу скорость топливоподкачивающего насоса является очень низкой (например, чуть выше нуля, так как может быть нужно поддерживать подачу напряжения топливоподкачивающему насосу, а не прерывисто подавать нулевое напряжение), давление подачи топливоподкачивающего насоса очень низкое. В результате давление подачи топливоподкачивающего насоса за время эксплуатации в импульсном режиме напоминает пилообразную волну, где период времени между впадиной волны и прилегающим пиком волны, следующим за впадиной, пропорционален длительности подачи напряжения на первом, более высоком, уровне, а период времени между пиком волны и соседней впадиной волны, следующей за пиком, пропорционален длительности подачи напряжения на втором, более низком, уровне.
В отличие от непрерывной эксплуатации насоса, при импульсной эксплуатации насоса, когда питание топливоподкачивающему насосу подают только в течение длительности каждого импульса, энергоэффективность выше. Кроме того, импульсная, а не непрерывная, эксплуатация насоса позволяет продлить срок службы топливоподкачивающего насоса и снизить расходы на техобслуживание топливоподкачивающего насоса.
При импульсной эксплуатации насоса контроллер двигателя может осуществлять управление насосом либо по разомкнутому, либо по замкнутому контуру. При управлении по разомкнутому контуру можно подавать топливоподкачивающему насосу импульсы напряжения заранее заданной длительности (и, следовательно, с заранее заданным коэффициентом заполнения), при этом управление не зависит от измеренного или опосредованно выведенного давления ниже по потоку от топливоподкачивающего насоса (в настоящем описании именуемого «давление подачи топливоподкачивающего насоса»). В отличие от него, при управлении по замкнутому контуру давление подачи по обратной связи поступает в контроллер и влияет на последующие импульсы высокого напряжения, подаваемые топливоподкачивающему насосу (а также на длительность интервалов между импульсами высокого напряжения при подаче напряжения чуть выше 0 В). В примерах, где давление подачи измеряет датчик давления, направляющий данные обратной связи контроллеру, неисправность датчика давления может привести к отклонению показаний датчика давления и, как следствие, к отклонению давления подачи от необходимого или ожидаемого давления, что, в свою очередь, может ухудшить работу двигателя. В качестве примера, погрешности в ожидаемом диапазоне выходного сигнала датчика (именуемые «погрешности в пределах диапазона») гораздо труднее выявить, чем погрешности за пределами ожидаемого диапазона выходного сигнала датчика (именуемые «погрешности за пределами диапазона»). Выявление погрешности в пределах диапазона особенно важно, когда датчик подает данные обратной связи для управления импульсной эксплуатацией насоса по замкнутому контуру, так как погрешность приводит к неправильной регулировке импульсов напряжения, подаваемых топливоподкачивающему насосу.
Одно решение для выявления погрешности в пределах диапазона датчика давления топлива раскрыто Ставнхеймом (Stavnheim) с соавторами в документе U.S. 6,526,948 В1 и относится к диагностике датчиков давления топлива, «застрявших» в пределах диапазона. В этом случае контроллер осуществляет семплинг (замер) сигнала датчика давления топлива, в том числе пикового давления и давления впадины, некоторое количество раз. Затем контроллер вычисляет среднее значение давления и сравнивает измеренные значения с указанным средним значением. Если измеренное значение лежит в пороговых пределах среднего значения, это означает, что датчик давления застрял в пределах диапазона (то есть динамически не откликается на изменения давления топлива), и контроллер регистрирует код погрешности. При достижении определенного числа зарегистрированных погрешностей, контроллер запускает алгоритм минимальной подачи топлива, позволяющей только вывести транспортное средство из опасного положения или довести его до станции техобслуживания.
Однако авторы настоящего изобретения выявили потенциальные недостатки такого решения. В качестве примера, вышеизложенный способ ограничен выявлением неисправного датчика давления, не откликающегося на колебания давления. При этом неисправный датчик давления все же может откликаться на колебания давления, но при этом выдавать показания выше или ниже фактического давления. Кроме того, подача топлива, достаточного только для того, чтобы вывести транспортное средство из опасного положения или довести его до станции техобслуживания, после выявления неисправности датчика давления может привести к невозможности эксплуатации транспортного средства требуемым образом в случае неисправности датчика давления, что может отрицательно сказаться на удовлетворенности водителя.
Для преодоления вышеуказанных недостатков, авторы настоящего изобретения определили способы и системы для диагностики погрешностей в пределах диапазона датчика давления и регулирования работы топливной системы по результатам диагностики. В одном примере вышеуказанные недостатки может преодолеть способ эксплуатации топливной системы двигателя, содержащий шаги, на которых: во время эксплуатации топливоподкачивающего насоса в импульсном режиме регулируют уровень напряжения, подаваемого топливоподкачивающему насосу, в зависимости от выходного сигнала датчика давления ниже по потоку от топливоподкачивающего насоса и отслеживают выходной сигнал на предмет сглаживания; и, при выявлении сглаживания, указывают наличие погрешности датчика давления и эксплуатируют топливоподкачивающий насос без учета выходного сигнала датчика давления. Это позволяет выявлять погрешности, возникающие в пределах нормального рабочего диапазона датчика давления, установленного ниже по потоку от топливоподкачивающего насоса, и переходить от управления топливоподкачивающим насосом по замкнутому контуру к управлению им по разомкнутому контуру после выявления таких погрешностей. Несмотря на то, что топливная экономичность при управлении топливоподкачивающим насосом по разомкнутому контуру может быть ниже, чем при управлении топливоподкачивающим насосом по замкнутому контуру, это может не оказывать существенного влияния на управляемость.
Для обеспечения точности управления топливоподкачивающим насосом и диагностики погрешностей в пределах диапазона датчика давления, способ может дополнительно содержать шаг, на котором динамически определяют уставку давления клапана разгрузки давления и давление паров топлива в топливной системе. Это может включать в себя: во время работы двигателя в установившемся режиме с запрошенным давлением подачи топливоподкачивающего насоса ниже первого порога, уменьшение коэффициента заполнения импульсов напряжения, подаваемых топливоподкачивающему насосу, до тех пор, пока не будет выявлено сглаживание выходного сигнала датчика давления ниже по потоку от топливоподкачивающего насоса, и сохранение в памяти давления, при котором происходит сглаживание выходного сигнала, в качестве давления паров топлива в топливной системе; во время работы двигателя в установившемся режиме с запрошенным давлением подачи топливоподкачивающего насоса выше второго порога, увеличение коэффициента заполнения импульсов напряжения, подаваемых топливоподкачивающему насосу, до тех пор, пока не будет выявлено сглаживание выходного сигнала датчика давления, сохранение в памяти давления, при котором произошло сглаживание выходного сигнала, в качестве уставки давления клапана разгрузки давления; и регулирование работы топливоподкачивающего насоса на основании сохраненных в памяти уставки давления и давления паров топлива. Такое динамическое определение ожидаемых физических максимальных и минимальных значений топливной системы позволяет в целом повысить точность управления топливоподкачивающим насосом и, в свою очередь, точность диагностики погрешности датчика давления.
В другом примере согласно настоящему раскрытию топливоподкачивающим насосом можно управлять, применяя робастную стратегию управления по замкнутому контуру. Это может включать в себя, во время импульсной эксплуатации топливоподкачивающего насоса, выключение топливоподкачивающего насоса, когда измеренное датчиком давление подачи увеличится до необходимого пикового давления, или когда период включенного состояния топливоподкачивающего насоса достигнет калиброванного максимума, и включение топливоподкачивающего насоса, когда либо измеренное датчиком давление подачи уменьшится до необходимого давления впадины, либо объем топлива, всосанный двигателем, достигнет заранее заданного объема. Такая эксплуатация может обеспечить преимущество, состоящее в снижении вероятности «заклинивания» топливоподкачивающего насоса на давлении ниже уставки давления, когда топливоподкачивающий насос включен из-за заниженного показания датчика, или на давлении выше давления паров топлива, когда топливоподкачивающий насос выключен из-за завышенного показания датчика. Робастная стратегия управления может опционально предусматривать калибровку выходного сигнала датчика после выявления того, что период включенного состояния топливоподкачивающего насоса достиг калиброванного максимума, или объем топлива, всосанный двигателем, достиг заранее заданного объема, что позволяет точно управлять топливоподкачивающим насосом даже при неисправности датчика.
Следует понимать, что вышеприведенное краткое раскрытие изобретения служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно в разделе «Осуществление изобретения». Это раскрытие не предназначено для обозначения ключевых или существенных отличительных признаков заявленного объекта изобретения, объем которого однозначно определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, заявленный объект изобретения не ограничен вариантами осуществления, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание чертежей
ФИГ. 1 схематически изображает пример осуществления цилиндра в двигателе внутреннего сгорания транспортного средства.
ФИГ. 2 схематически изображает пример осуществления топливной системы, который может быть применен в двигателе на ФИГ. 1.
На ФИГ. 3А-3Е представлены графики измеренного давления подачи топливоподкачивающего насоса в зависимости от времени во время импульсной эксплуатации топливоподкачивающего насоса.
ФИГ. 4 изображает блок-схему алгоритма для диагностики погрешности в пределах диапазона датчика давления ниже по потоку от топливоподкачивающего насоса и управления эксплуатацией топливоподкачивающего насоса в зависимости от результата диагностики.
ФИГ. 5А изображает блок-схему алгоритма для управления топливоподкачивающим насосом по замкнутому контуру.
ФИГ. 5В изображает блок-схему алгоритма для управления топливоподкачивающим насосом по замкнутому контуру в соответствии с первым примером стратегии управления с обратной связью, который может быть выполнен совместно с алгоритмом на ФИГ. 5А.
ФИГ. 5С изображает блок-схему алгоритма для управления топливоподкачивающим насосом по замкнутому контуру в соответствии со вторым примером стратегии управления с обратной связью, который может быть выполнен совместно с алгоритмом на ФИГ. 5А.
ФИГ. 6 изображает блок-схему алгоритма для регулирования работы топливной системы посредством контроллера для определения уставки давления клапана разгрузки давления и давления паров топлива топливной системы.
ФИГ. 7 изображает блок-схему алгоритма для диагностики погрешности в пределах диапазона выходного сигнала датчика давления ниже по потоку от топливоподкачивающего насоса.
ФИГ. 8 содержит диаграмму примеров кривых рассматриваемых сигналов во время регулирования работы топливной системы посредством контроллера для определения уставки давления клапана разгрузки давления и давления паров топлива топливной системы согласно алгоритму на ФИГ. 6.
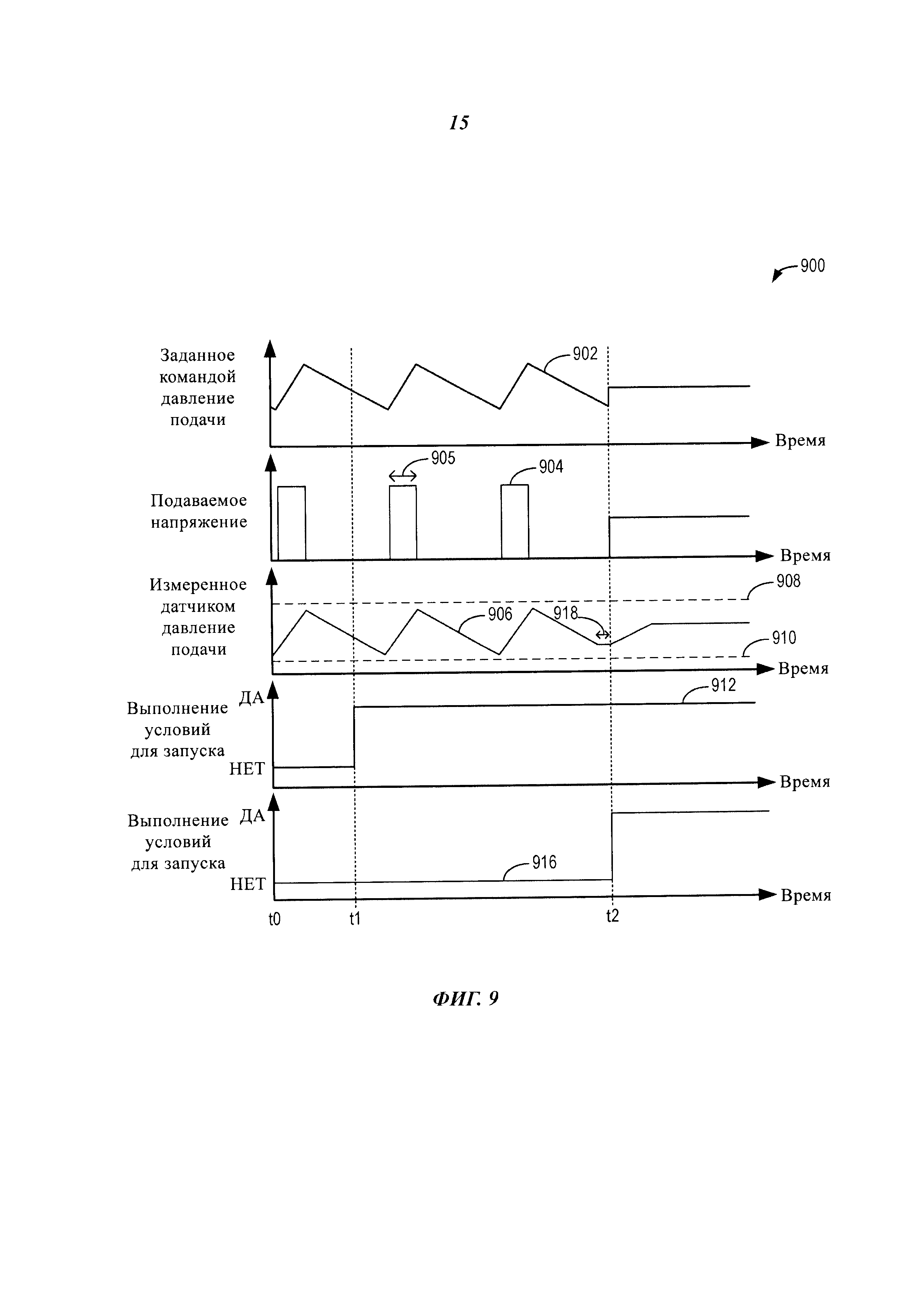
ФИГ. 9 содержит диаграмму примеров кривых рассматриваемых сигналов во время диагностики погрешности в пределах диапазона выходного сигнала датчика давления ниже по потоку от топливоподкачивающего насоса согласно алгоритму на ФИГ. 7, когда погрешность приводит к сглаживанию впадин выходного сигнала датчика давления.
ФИГ. 10 содержит диаграмму примеров кривых рассматриваемых сигналов во время диагностики погрешности в пределах диапазона выходного сигнала датчика давления ниже по потоку от топливоподкачивающего насоса согласно алгоритму на ФИГ. 7, когда погрешность приводит к сглаживанию пиков выходного сигнала датчика давления.
ФИГ. 11 изображает блок-схему алгоритма для робастного управления топливоподкачивающим насосом по замкнутому контуру.
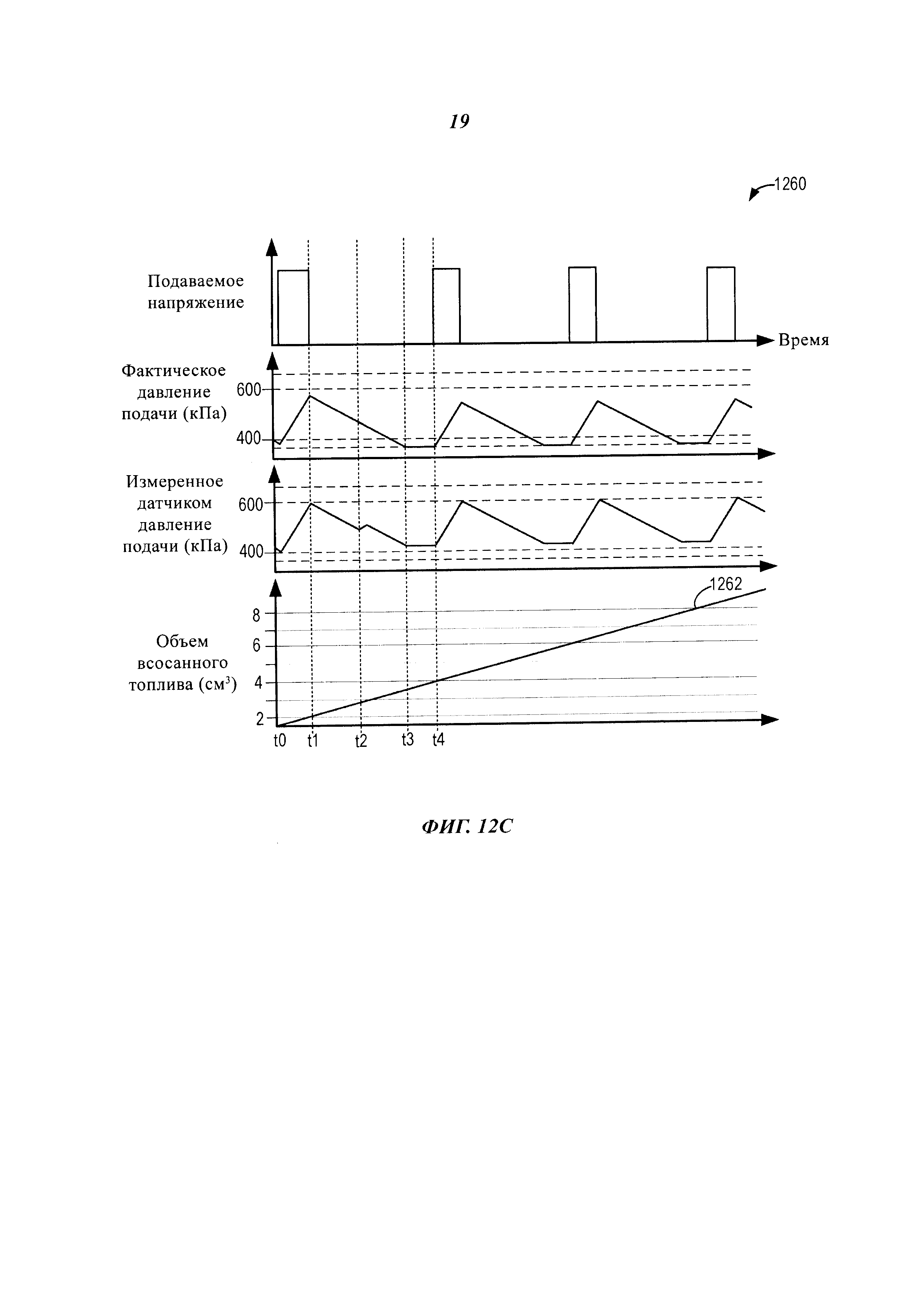
На ФИГ. 12A-12D представлены диаграммы примеров кривых рассматриваемых сигналов в процессе робастного управления топливоподкачивающим насосом по замкнутому контуру без калибровки выходного сигнала датчика (ФИГ. 12А и 12С) и с калибровкой выходного сигнала датчика (ФИГ. 12В и 12D). На ФИГ. 12А-12В датчик выдает заниженные показания, а на ФИГ. 12С-12D - завышенные показания.
Осуществление изобретения
Нижеследующее описание относится к системам и способам для управления топливоподкачивающим насосом в топливной системе двигателя, например, двигателя на ФИГ. 1, а также диагностики погрешности в пределах диапазона датчика давления, расположенного ниже по потоку от топливоподкачивающего насоса, и регулирования работы топливной системы в зависимости от результата диагностики. Как показано на ФИГ. 2, топливная система может содержать и топливные форсунки распределенного впрыска, и топливные форсунки непосредственного впрыска, и относящиеся к ним топливные рампы. При этом раскрытые в настоящем описании способы и системы равным образом применимы к топливным системам, содержащим форсунки распределенного впрыска и не содержащим форсунки непосредственного впрыска, и топливным системам, содержащим форсунки непосредственного впрыска и не содержащим форсунки распределенного впрыска, а также топливным системам, содержащим топливные форсунки иных типов с возможностью приема топлива повышенного давления от топливоподкачивающего насоса. Топливоподкачивающий насос можно эксплуатировать в импульсном режиме с управлением по замкнутому контуру с обратной связью (например, согласно алгоритму на ФИГ. 5А-5С), в котором импульсы напряжения подают топливоподкачивающему насосу до тех пор, пока не будет достигнуто необходимое давление топлива, измеряемое датчиком давления ниже по потоку от топливоподкачивающего насоса. Кроме того, в контроллере двигателя можно динамически определять уставку давления клапана разгрузки давления топливной системы и давление паров топлива топливной системы посредством отслеживания измеренного датчиком давления ниже по потоку от топливоподкачивающего насоса с одновременным регулированием напряжения, подаваемого топливоподкачивающему насосу (например, путем регулирования коэффициента заполнения импульсов напряжения, подаваемых топливоподкачивающему насосу), согласно алгоритму на ФИГ. 6 и диаграмме на ФИГ. 8. Во время подачи импульсов напряжения топливоподкачивающему насосу выходной сигнал датчика давления ниже по потоку от топливоподкачивающего насоса может иметь форму пилообразной кривой, пример которой представлен на ФИГ. 3А. Однако при наличии погрешности в пределах диапазона датчика давления возможно сглаживание пиков или впадин пилообразной кривой в зависимости от характера погрешности в пределах диапазона, как показано на ФИГ. 3В-3С. Как раскрыто на ФИГ. 4, контроллер может выполнить алгоритм, в котором отслеживают выходной сигнал датчика давления ниже по потоку от топливоподкачивающего насоса на предмет сглаживания (например, согласно алгоритму на ФИГ. 7) во время импульсной эксплуатации насоса с управлением по замкнутому контуру. При выявлении сглаживания может быть указано наличие погрешности в пределах диапазона датчика давления, и контроллер может перейти от управления насосом по замкнутому контуру (с учетом данных обратной связи от датчика давления при управлении топливоподкачивающим насосом) к управлению насосом по разомкнутому контуру (без учета данных обратной связи от датчика давления при управлении топливоподкачивающим насосом), согласно диаграммам на ФИГ. 9 и 10. Или же топливоподкачивающий насос можно эксплуатировать согласно робастной стратегии управления по замкнутому контуру, представленной в алгоритме на ФИГ. 11. Данная стратегия может предусматривать выключение топливоподкачивающего насоса, пробывшего включенным в течение калиброванного максимального периода включенного состояния, даже если выходной сигнал датчика давления не достиг необходимого пикового давления, и включение топливоподкачивающего насоса, когда объем топлива, всосанного после выключения топливоподкачивающего насоса, достигнет заранее заданного объема, даже если выходной сигнал датчика давления не достиг необходимого давления впадины, как показано на ФИГ. 12А-120. Выходной сигнал датчика давления можно опционально калибровать, как раскрыто на ФИГ. 12В и 12D, если будет установлено, что датчик выдает завышенные или заниженные показания, с возможностью использования калиброванного выходного сигнала датчика давления вместо выходного сигнала датчика давления при управлении топливоподкачивающим насосом с обратной связью.
Что касается терминологии, используемой в тексте настоящего раздела «Осуществление изобретения», «распределенный впрыск» может быть сокращен до «РВ», а «непосредственный впрыск» - до «НВ». «Насос высокого давления» может сокращенно именоваться «насос ВД» (или «НВД») или «топливный насос ВД». Аналогичным образом, топливоподкачивающий насос также может именоваться «насос низкого давления» (с сокращением до «насоса НД» или «ННД»). Давление в топливной рампе или значение давления топлива внутри топливной рампы может быть сокращено до «ДТР». Топливная рампа непосредственного впрыска также может именоваться «топливная рампа высокого давления» с возможностью сокращения до «топливной рампы ВД». Для краткости уставка давления клапана разгрузки давления в настоящем описании будет именоваться «уставка давления».
На ФИГ. 1 изображен пример камеры сгорания или цилиндра двигателя 10 внутреннего сгорания, который может входить в состав автотранспортного средства 5. Двигателем 10 можно по меньшей мере частично управлять с помощью системы управления, содержащей контроллер 12, и управляющих воздействий от водителя 130 транспортного средства через устройство 132 ввода. В данном примере устройство 132 ввода содержит педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала положения педали (ПП). Цилиндр 14 (в настоящем описании также именуемый «камера 14 сгорания») двигателя 10 может содержать стенки 136 камеры сгорания с расположенным между ними поршнем 138. Поршень 138 может быть соединен с коленчатым валом 140 для преобразования возвратно-поступательного движения поршня во вращение коленчатого вала. Коленчатый вал 140 может быть соединен по меньшей мере с одним ведущим колесом пассажирского транспортного средства через систему трансмиссии (не показана). С коленчатым валом 140 также может быть соединен стартер (не показан) через маховик для пуска двигателя 10.
Впускной воздух может поступать в цилиндр 14 через набор впускных воздушных каналов 142, 144 и 146. Впускные воздушные каналы 142, 144 и 146 выполнены с возможностью сообщения и с другими цилиндрами двигателя 10 помимо цилиндра 14. В некоторых примерах один или несколько впускных каналов могут содержать устройство наддува, например, турбонагнетатель или механический нагнетатель. Например, на ФИГ. 1 изображен двигатель 10, выполненный с турбонагнетателем, содержащим компрессор 174, установленный между впускными воздушными каналами 142 и 144, и газовую турбину 176, установленную вдоль выпускного канала 158. Компрессор 174 может по меньшей мере частично приводить в действие газовая турбина 176 посредством вала 180, если устройство наддува выполнено в виде турбонагнетателя. Однако в других примерах, в которых двигатель 10 выполнен с механическим нагнетателем, газовая турбина 176 может опционально отсутствовать, а компрессор 174 может быть выполнен с механическим приводом от мотора или двигателя. Дроссель 162 с дроссельной заслонкой 164 может быть расположен вдоль какого-либо впускного канала двигателя для изменения расхода и (или) давления впускного воздуха, подаваемого в цилиндры двигателя. Например, дроссель 162 может быть расположен ниже по потоку от компрессора 174, как на ФИГ. 1, или выше по потоку от компрессора 174.
В выпускной канал 148 могут поступать отработавшие газы и из других цилиндров двигателя 10 помимо цилиндра 14. Датчик 128 отработавших газов показан соединенным с выпускным каналом 158 выше по потоку от устройства 178 снижения токсичности выбросов. Датчик 128 можно выбрать из числа подходящих для определения воздушно-топливного отношения в отработавших газах, например: линейный датчик кислорода или (УДКОГ) (универсальный или широкодиапазонный датчик кислорода в отработавших газах), двухрежимный датчик кислорода или (ДКОГ) (как показано на фигуре), НДКОГ (нагреваемый ДКОГ), датчик оксидов азота, углеводородов или угарного газа. Устройство 178 снижения токсичности выбросов может представлять собой трехкомпонентный каталитический нейтрализатор (ТКН), ловушку оксидов азота, устройство снижения токсичности выбросов какого-либо иного типа или их комбинацию.
Каждый цилиндр двигателя 10 может содержать один или несколько впускных клапанов и один или несколько выпускных клапанов. Например, цилиндр 14 показан содержащим по меньшей мере один тарельчатый впускной клапан 150 и по меньшей мере один тарельчатый выпускной клапан 156, расположенные в верхней области цилиндра 14. В некоторых примерах каждый цилиндр двигателя 10, в том числе цилиндр 14, может содержать по меньшей мере два тарельчатых впускных клапана и по меньшей мере два тарельчатых выпускных клапана в верхней области цилиндра.
Впускным клапаном 150 может управлять контроллер 12 посредством исполнительного механизма 152. Аналогичным образом, выпускным клапаном 156 может управлять контроллер 12 посредством исполнительного механизма 154. В некоторых состояниях контроллер 12 может изменять сигналы, направляемые на исполнительные механизмы 152 и 154, для регулирования открытия и закрытия соответственно впускных и выпускных клапанов. Положение впускного клапана 150 и выпускного клапана 156 могут определять соответствующие датчики положения клапанов (не показаны). Исполнительные механизмы клапанов могут быть электрическими или кулачковыми, либо представлять собой какую-либо их комбинацию. Фазы газораспределения впускного и выпускного клапана можно регулировать одновременно, либо использовать возможности изменения фаз кулачкового распределения, двойного независимого изменения фаз кулачкового распределения или фиксированные фазы кулачкового распределения. Каждая система кулачкового привода может содержать один или несколько кулачков с возможностью использования одной или нескольких из следующих систем: переключения профиля кулачков (ППК), изменения фаз кулачкового распределения (ИФКР), изменения фаз газораспределения (ИФГ) и (или) изменения высоты подъема клапанов (ИВПК) с возможностью управления контроллером 12 для регулирования работы клапанов. Например, цилиндр 14 может содержать электроприводной впускной клапан и выпускной клапан с кулачковым приводом, содержащим систему ППК и (или) ИФКР, или наоборот. В других примерах впускные и выпускные клапаны могут иметь общий исполнительный механизм или систему привода, или исполнительный механизм или систему привода изменения фаз газораспределения.
Цилиндр 14 может иметь степень сжатия, представляющую собой отношение объема при нахождении поршня 138 в нижней точке к объему при нахождении поршня в верхней точке. В одном примере степень сжатия лежит в диапазоне от 9:1 до 10:1. Однако в некоторых примерах, где используют разные топлива, степень сжатия может быть выше. Это возможно, например, при использовании топлив с высоким октановым числом или высокой скрытой энтальпией парообразования. Степень сжатия также может быть выше при использовании непосредственного впрыска в связи с влиянием последнего на детонацию в двигателе.
В некоторых примерах каждый цилиндр двигателя 10 может содержать свечу 192 зажигания для воспламенения. Система 190 зажигания выполнена с возможностью подачи искры зажигания в камеру 14 сгорания с помощью свечи 192 зажигания по сигналу опережения зажигания (03) от контроллера 12 в определенных режимах работы. Однако в некоторых вариантах осуществления свеча 192 зажигания может отсутствовать, например, в двигателе 10 с возможностью автоматического воспламенения или воспламенения при впрыске топлива, что может иметь место в некоторых дизельных двигателях.
В некоторых примерах каждый цилиндр двигателя 10 может быть выполнен с одной или несколькими топливными форсунками для подачи в него топлива. В качестве неограничивающего примера, цилиндр 14 показан содержащим две топливные форсунки 166 и 170. Топливные форсунки 166 и 170 могут быть выполнены с возможностью подачи топлива, поступившего из топливной системы 8. Как подробнее раскрыто на примере ФИГ. 2, топливная система 8 может содержать один или несколько топливных баков, топливных насосов и топливных рамп.
Топливная форсунка 166 показана соединенной непосредственно с цилиндром 14 для впрыска топлива непосредственно в него пропорционально длительности импульса сигнала ДИВТ-1, полученного от контроллера 12 через электронный драйвер 168. Так топливная форсунка 166 обеспечивает непосредственный впрыск топлива в цилиндр 14 сгорания. Хотя на ФИГ. 1 форсунка 166 показана расположенной сбоку от цилиндра 14, она также может быть расположена над поршнем, например, рядом со свечой 192 зажигания. Такое расположение может способствовать лучшему смешиванию и сгоранию при работе двигателя на спиртосодержащем топливе из-за пониженной испаряемости некоторых спиртосодержащих топлив. Или же форсунка может быть расположена над впускным клапаном или рядом с ним для улучшения смешивания. Топливо может поступать в топливную форсунку 166 из топливного бака топливной системы 8 через топливоподкачивающий насос, и/или топливный насос высокого давления и топливную рампу. Топливный бак также может содержать приемопередатчик давления с возможностью направления сигнала в контроллер 12.
Топливная форсунка 170 показана установленной во впускном воздушном канале 146, а не в цилиндре 14, что обеспечивает впрыск топлива во впускной тракт выше по потоку от цилиндра 14. Топливная форсунка 170 выполнена с возможностью впрыска топлива, полученного из топливной системы 8, пропорционально длительности импульса сигнала ДИВТ-2, полученного от контроллера 12 через электронный драйвер 171. Отметим, что можно использовать единственный электронный драйвер 168 или 171 для обеих систем впрыска топлива или несколько драйверов, например электронный драйвер 168 для топливной форсунки 166 и электронный драйвер 171 для топливной форсунки 170, как показано на фигуре.
В другом примере каждая из топливных форсунок 166 и 170 может быть выполнена в виде форсунки непосредственного впрыска для впрыскивания топлива непосредственно в цилиндр 14. В другом примере каждая из топливных форсунок 166 и 170 может быть выполнена в виде форсунки распределенного впрыска для впрыскивания топлива во впускной тракт выше по потоку от впускного клапана 150. В других примерах цилиндр 14 может содержать единственную топливную форсунку с возможностью получения различных топлив из топливных систем в виде топливной смеси с разным относительным количеством компонентов для впрыска топливной смеси либо непосредственно в цилиндр, в случае топливной форсунки непосредственного впрыска, либо выше по потоку от впускных клапанов, в случае форсунки распределенного впрыска. Таким образом, следует понимать, что раскрытые в настоящем описании топливные системы не ограничиваются конкретными конфигурациями топливных форсунок, приведенными в настоящем описании для примера.
Обе форсунки могут подавать топливо в цилиндр во время одного и того же рабочего цикла цилиндра. Например, каждая из форсунок выполнена с возможностью подачи части общего количества впрыскиваемого топлива для сжигания в цилиндре 14. Кроме того, распределение долей и/или относительное количество топлива, впрыскиваемого каждой из форсунок, могут быть разными в зависимости от параметров работы, например нагрузки двигателя, детонации и температуры отработавших газов, как будет раскрыто ниже. Подача топлива распределенного впрыска может происходить, когда впускной клапан открыт, впускной клапан закрыт (например, по существу до начала такта впуска), а также во время работы как с открытым, так и с закрытым впускным клапаном. Аналогичным образом, подача топлива непосредственного впрыска может происходить во время такта впуска, а также частично во время предшествующего такта выпуска, во время такта впуска, и частично во время такта сжатия, например. То есть даже для одного события сгорания впрыск топлива может происходить в разные моменты времени из форсунок распределенного впрыска и непосредственного впрыска. Кроме того, для одного события сгорания может быть выполнено несколько впрысков за рабочий цикл. Эти несколько впрысков могут быть выполнены во время такта сжатия, такта впуска или в период, являющийся какой-либо подходящей комбинацией этих тактов.
Как раскрыто выше, на ФИГ. 1 представлен только один цилиндр многоцилиндрового двигателя. При этом любой цилиндр может аналогичным образом содержать собственный комплект впускных и выпускных клапанов, топливную форсунку (форсунки), свечу зажигания и т.п. Следует понимать, что двигатель 10 может содержать любое подходящее количество цилиндров: 2, 3, 4, 5, 6, 8, 10, 12 и более. Кроме того, любой из этих цилиндров может содержать некоторые или все компоненты, раскрытые и изображенные на ФИГ. 1 на примере цилиндра 14.
Характеристики топливных форсунок 166 и 170 могут отличаться друг от друга. Например, отличия могут заключаться в размере: отверстие одной форсунки может быть больше, чем у другой. Прочие отличия включают в себя, но не ограничиваясь, следующие: разные углы распыла, разные рабочие температуры, разные ориентации, разные моменты впрыска, разные характеристики распыла, разные местоположения и т.п. Кроме того, в зависимости от соотношения долей топлива, впрыскиваемого форсунками 170 и 166, можно достичь разных результатов.
Контроллер 12 показан на ФИГ. 1 в виде микрокомпьютера, содержащего микропроцессорное устройство 106, порты 108 ввода/вывода, электронный носитель информации для исполняемых программ и калибровочных значений, в данном примере показанную в виде микросхемы 110 постоянного запоминающего устройства для хранения исполняемых инструкций, оперативное запоминающее устройство 112, энергонезависимое запоминающее устройство 114 и шину данных. Помимо сигналов, речь о которых шла выше, контроллер 12 может принимать разнообразные сигналы от соединенных с двигателем 10 датчиков, в том числе: массового расхода впускного воздуха (МРВ) от датчика 122 массового расхода воздуха; температуры охлаждающей жидкости двигателя (ТОЖД) от датчика 116 температуры, соединенного с рубашкой 118 охлаждения; профиля зажигания (ПЗ) от датчика 120 на эффекте Холла (или датчика иного типа), соединенного с коленчатым валом 140; положения дросселя (ПД) отдатчика положения дросселя; и абсолютного давления в коллекторе (ДВК) от датчика 124. Сигнал ДВК может служить показанием разрежения или давления во впускном коллекторе. Сигнал частоты вращения двигателя (в оборотах в минуту) может быть сгенерирован контроллером 12 из сигнала ПЗ.
В некоторых примерах транспортное средство 5 может представлять собой гибридное транспортное средство с возможностью подвода крутящего момента к одному или нескольким колесам 55 транспортного средства из нескольких источников. В других примерах транспортное средство 5 представляет собой традиционное транспортное средство только с двигателем или электрическое транспортное средство только с электрическим мотором (моторами). В представленном примере транспортное средство 5 содержит двигатель 10 и электрический мотор 52. Электрический мотор 52 может представлять собой обычный мотор или мотор-генератор. Коленчатый вал 140 двигателя 10 и электрического мотора 52 связан посредством трансмиссии 54 с колесами 55 транспортного средства, когда одна или несколько муфт 56 находятся в зацеплении. В изображенном примере первая муфта 56 установлена между коленчатым валом 140 и электрическим мотором 52, а вторая муфта 56 - между электрическим мотором 52 и трансмиссией 54. Контроллер 12 может направлять сигнал исполнительному механизму каждой из муфт 56 для ввода муфты в зацепление или вывода ее из зацепления для соединения или разъединения коленчатого вала 140 и электрического мотора 52 и связанных с ним компонентов и/или соединения или разъединения электрического мотора 52 и трансмиссии 54 и связанных с нею компонентов. Трансмиссия 54 может представлять собой систему с коробкой передач, систему с планетарной передачей или трансмиссию иного типа. В зависимости от типа силовой установки, транспортное средство может быть выполнено в виде параллельного, последовательного или последовательно-параллельный гибридного транспортного средства.
Электрический мотор 52 получает электропитание от тяговой аккумуляторной батареи 58 для подвода крутящего момента к колесам 55 транспортного средства. Электрический мотор 52 также можно эксплуатировать как генератор для производства электроэнергии для зарядки аккумуляторной батареи 58, например, во время торможения.
На ФИГ. 2 схематически изображен пример 200 осуществления топливной системы 8 с ФИГ. 1. Исполнительными механизмами топливной системы 8 может управлять контроллер, например, контроллер 12 с ФИГ. 1, для осуществления некоторых или всех операций, раскрытых на примере алгоритмов на ФИГ. 4-7.
Топливная система 8 выполнена с возможностью подачи топлива в двигатель, например двигатель 10 с ФИГ. 1, из топливного бака 202. В изображенном варианте осуществления топливная система представляет собой топливную систему РВНВ, содержащую первую топливную рампу 240 низкого давления с возможностью раздачи топлива одной или нескольким форсункам 242 распределенного впрыска и вторую топливную рампу 250 высокого давления с возможностью раздачи топлива одной или нескольким форсункам 252 непосредственного впрыска. При этом в других примерах топливная система 8 может представлять собой топливную систему РВ или НВ. В качестве примера, топливо может содержать один или несколько углеводородных компонентов, а также опциональный спиртовой компонент. Топливо может поступать в топливный бак 202 по заправочному каналу 204.
Топливоподкачивающий насос (ННД) 208, связанный с топливным баком 202, можно эксплуатировать для подачи топлива из топливного бака 202 в первый топливный канал 230. Как показано, первый топливный канал 230 содержит первый конец, соединенный с выходом топливоподкачивающего насоса, и второй конец, соединенный с первой топливной рампой, с возможностью подачи топлива, закачиваемого в первый топливный канал посредством ННД, в первую топливную рампу 240 и в форсунки 242 распределенного впрыска. В одном примере ННД 208 может быть электроприводным и быть расположен по меньшей мере частично в топливном баке 202. Как показано, обратный клапан 209 может быть расположен ниже по потоку от выхода ННД 208. Обратный клапан 209 выполнен с возможностью пропуска потока топлива из ННД 208 в первый топливный канал 230 с одновременным блокированием потока топлива в противоположном направлении - из первого топливного канала 230 в ННД 208. Давление ниже по потоку от обратного клапана 209 может быть отлично от давления ниже по потоку от ННД 208 и выше по потоку от обратного клапана 209; в настоящем описании «давление в первом топливном канале» означает давление в первом топливном канале ниже по потоку от обратного клапана 209.
Топливная система может содержать клапан 211 разгрузки давления для стравливания чрезмерного давления. В изображенном примере клапан 211 разгрузки давления расположен в канале 231, соединенном первым концом с первым топливным каналом 230, а вторым концом - с топливным баком 202, для пропуска потока топлива из первого топливного канала 230 обратно в топливный бак 202, если давление топливной системы превысит уставку давления клапана разгрузки давления. Клапан разгрузки давления может представлять собой пассивный клапан с возможностью открытия и закрытия в зависимости от воздействующего на него давления текучей среды; или же клапан разгрузки давления может представлять собой активно управляемый клапан, и контроллер может направлять сигнал на исполнительный механизм клапана разгрузки давления для его открытия или закрытия в зависимости от давления текучей среды, например давления подачи топливной системы. Уставка давления - это давление, при котором происходит пассивное (или активное) открытие клапана разгрузки давления для стравливания давления из топливной системы (например, за счет возврата топлива в топливный бак). Значение уставки давления может быть фиксированным и обусловленным геометрией клапана разгрузки давления, или его может изменять исполнительный механизм клапана разгрузки давления по сигналу контроллера.
Несмотря на то, что первая топливная рампа 240 показана раздающей топливо в четыре форсунки 242 распределенного впрыска, следует понимать, что первая топливная рампа 240 может раздавать топливо в любое подходящее количество топливных форсунок. В качестве примера, первая топливная рампа 240 может раздавать топливо одной из форсунок 242 распределенного впрыска для каждого цилиндра двигателя. В других примерах первый топливный канал 230 выполнен с возможностью подачи топлива в форсунки 242 распределенного впрыска через две или более первые топливные рампы. Например, если цилиндры двигателя расположены V-образно, первый топливный канал может вести в две первые топливные рампы, каждая из которых может раздавать топливо в соответствующие форсунки распределенного впрыска.
В изображенном примере второй топливный канал 232 отходит от первого топливного канала выше по потоку от первой топливной рампы. Первый конец второго топливного канала соединен с первым топливным каналом выше по потоку от первой топливной рампы, а второй конец второго топливного канала соединен со второй топливной рампой. Насос 228 непосредственного впрыска (НВД), получающий топливо, выкачиваемое из топливного бака посредством ННД 208, расположен во втором топливном канале 232. В одном примере НВД 228 может представлять собой механический вытеснительный насос. НВД 228 выполнен с возможностью сообщения с форсунками 252 непосредственного впрыска через вторую топливную рампу 250. Топливо, закачиваемое ННД 208 в первый топливный канал 230, может выкачиваться из первого топливного канала 230 во второй топливный канал 232 посредством НВД 228 с последующим повышением давления топлива насосом НВД 228 перед направлением его потока во вторую топливную рампу 250 для непосредственного впрыска в двигатель форсунками 252 непосредственного впрыска. Вторая топливная рампа 250 может представлять собой топливную рампу высокого давления; например, топливо во второй топливной рампе 250 может находиться под более высоким давлением, чем топливо в первой топливной рампе 240, в связи с дополнительным повышением давления топлива в НВД 228.
Различные компоненты топливной системы 8 выполнены с возможностью сообщения с системой управления двигателем, например контроллером 12. Например, контроллер 12 может принимать сигналы, отражающие параметры работы, от различных датчиков, относящихся к топливной системе 8, в дополнение к датчикам, речь о которых шла выше на примере ФИГ. 1. В число этих сигналов могут входить сигналы от одного или нескольких датчиков давления, расположенных в топливной системе, например датчиков 234, 235 и 236 давления. В число этих сигналов также может входить сигнал от датчика 206 уровня топлива, отражающий количество топлива в топливном баке 202. Контроллер 12 также может принимать сигналы от одного или нескольких датчиков состава топлива, по которым можно определять состав топлива в дополнение или вместо опосредованного выведения состава топлива по сигналу датчика отработавших газов (например, датчика 128 на ФИГ. 1). Например, показание состава топлива в топливном баке 202 может быть выдано датчиком 210 состава топлива. Датчик 210 состава топлива может дополнительно содержать датчик температуры топлива. Дополнительно или в качестве альтернативы, один или несколько датчиков состава топлива могут быть установлены в любом подходящем месте вдоль топливных каналов между топливным баком и топливными форсунками.
В примере на ФИГ. 2 топливная система содержит датчик 236 давления, соединенный со второй топливной рампой 250, и один или несколько датчиков 234 давления, соединенных с первым топливным каналом 230, и датчик 235 давления, соединенный с первой топливной рампой 240. Датчик 234 давления выполнен с возможностью определения давления топлива в первом топливном канале 230 ниже по потоку от топливоподкачивающего насоса и, таким образом, давления подачи топливоподкачивающего насоса. Датчик 235 давления выполнен с возможностью измерения уровня давления в первой топливной рампе 240. Датчик 236 давления выполнен с возможностью измерения уровня давления во второй топливной рампе 250. Местоположения датчиков давления на ФИГ. 2 показаны исключительно для примера и не имеют ограничивающего характера; вместо показанных датчиков давления или в дополнение к ним, в топливной системе 8 могут быть установлены и другие датчики давления для измерения давления в разных местах системы. Измеренные датчиками давления могут быть направлены в виде сигналов в контроллер 12. В некоторых примерах в различных местах в топливной системе 8 могут быть установлены датчики других типов с возможностью опосредованного выведения давлений в топливной системе по их выходным сигналам.
В контексте настоящего описания термин «давление подачи» означает давление топлива ниже по потоку от топливоподкачивающего насоса, а именно -ниже по потоку от обратного клапана 209 в примере топливной системы на ФИГ. 2, и выше по потоку от какого-либо насоса НВ или иного типа, который может входить в состав системы. В примере, где топливная система содержит датчик давления в первом топливном канале (например, датчик 234 давления) и не содержит датчик давления в первой топливной рампе, «давление подачи» означает давление, измеренное в первом топливном канале. В примере, где топливная система содержит датчик давления в первой топливной рампе (например, датчик 235 давления), но не содержит датчик давления в первом топливном канале, «давление подачи» означает давление в первой топливной рампе. В примере, где топливная система содержит датчик давления и в первом топливном канале, и в первой топливной рампе, «давление подачи» может означать либо только давление в первом топливном канале, либо только давление в первой топливной рампе.
Контроллер 12 выполнен с возможностью управления работой ННД 208 и НВД 228 для регулирования количества, давления, расхода и т.п. топлива, подаваемого в двигатель. В качестве примера, контроллер 12 может изменять заданное давление, величину хода поршня насоса, коэффициент заполнения сигнала управления насосом и/или расход потока топлива топливных насосов для подачи топлива в различные места топливной системы. И при распределенном впрыске, и при непосредственном впрыске, насосом ННД 208 может управлять контроллер 12 для подачи топлива в первую топливную рампу 240 и/или НВД 228 в зависимости от давления в первом топливном канале, и/или первой топливной рампе, и/или второй топливной рампе. Драйвер, соединенный с помощью электронных средств с контроллером 12, выполнен с возможностью направления сигнала управления исполнительному механизму ННД 208 для регулирования подачи (например, скорости и/или давления подачи) ННД 208. Во время непосредственного впрыска, количество топлива, подаваемого в форсунки непосредственного впрыска через НВД 228, можно регулировать путем регулирования и координирования подачи ННД 208 и НВД 228.
Контроллер 12 может управлять ННД 208 для его эксплуатации в непрерывном режиме или в импульсном режиме. Аналогичным образом, контроллер 12 может управлять НВД 228 для его эксплуатации в непрерывном режиме или в импульсном режиме. При эксплуатации ННД 208 в непрерывном режиме, топливоподкачивающему насосу подают неизменное ненулевое напряжение для подачи топлива при постоянном давлении топлива в первую топливную рампу 240. Эксплуатацию НВД 228 в непрерывном режиме можно осуществлять схожим образом. При эксплуатации ННД 208 в импульсном режиме ННД может быть приведен в действие (например, включен), но с подачей на него нулевого напряжения или напряжения чуть выше нуля. Затем ННД 208 могут быть поданы импульсы более высокого напряжения. Во время подачи каждого импульса более высокого напряжения, происходит повышение напряжения, подаваемого ННД, с более низкого положительного напряжения (например, 0В или по существу 0В) до более высокого положительного напряжения (например, 8-12В), поддержание данного более высокого напряжения в течение некоторого периода времени (например, 30-300 мс), а затем - понижение напряжения с более высокого обратно до более низкого.
В соответствии с первым примером стратегии управления с обратной связью, коэффициент заполнения импульсов напряжения является фиксированным. Коэффициент заполнения импульсов напряжения определяет соотношение периодов подачи более низкого напряжения и более высокого напряжения топливоподкачивающему насосу (и, тем самым, длительность импульсов). В подобных случаях более высокое напряжение для подачи топливоподкачивающему насосу можно выбирать в зависимости от фиксированного коэффициента заполнения (определяющего длительность импульсов более высокого напряжения). Например, ННД 208 можно подавать импульсы 8В, когда интервал между импульсами более высокого напряжения (во время которого происходит подача более низкого напряжения) составляет от 0 до 50 миллисекунд. Или же, если интервал между импульсами более высокого напряжения составляет от 50 до 100 миллисекунд, ННД 208 можно подавать импульсы 10В. В другом примере ННД 208 можно подавать импульсы 12В, если интервал между импульсами более высокого напряжения составляет от 100 до 250 миллисекунд.
В отличие от первого примера, во втором примере стратегии управления с обратной связью ННД включают (например, эксплуатируют при высоком напряжении), если по результатам измерения будет установлено, что достигнуто необходимое давление подачи впадины, и выключают (например, эксплуатируют с напряжением около 0В), если по результатам измерения будет установлено, что достигнуто необходимое пиковое давление подачи.
Эксплуатация ННД в импульсном режиме позволяет эффективно снизить энергопотребление ННД с одновременным уменьшением времени отклика при приведении ННД в действие. Эксплуатация в импульсном режиме также позволяет продлить срок службы ННД 208. Эксплуатацию НВД 228 в импульсном режиме можно осуществлять схожим образом.
Электронный модуль насоса (ЭМН) ННД 208 выполнен с возможностью подачи электропитания электромотору, соединенному с ННД. В одном примере контроллер, например контроллер 12 с ФИГ. 1, считывает выходной сигнал датчика давления топлива, измеряющего давление подачи ННД, и направляет в ЭМН команду управления топливным насосом (КУТН), изменяемую и определяемую в зависимости от выходного сигнала датчика давления топлива, помимо прочих факторов. КУТН может быть закодирована в виде, например, сигнала коэффициента заполнения с частотой 150 Гц, передающего целевой коэффициент заполнения для полевого транзистора (ПТ) ННД в ЭМН. Или же ЭМН может передавать КУТН через последовательный интерфейс, например, шину сети локальных контроллеров СЛК (CAN-bus) или шину локальной коммутируемой сети ЛКС (UN-bus). ЭМН принимает заданный командой коэффициент заполнения ПТ и осуществляет включение/выключение ПТ на той или иной частоте, например, 9.8 кГц. В результате происходит подача эффективного напряжения щеточному мотору постоянного тока насоса. Таким образом, если напряжение источника напряжения транспортного средства составляет 12В, а необходимое эффективное напряжение для подачи ННД - 6В, ПТ можно включать на 0.00005 секунд и выключать на 0.00005 секунд (то есть эксплуатировать с 50% коэффициентом заполнения). Ток ЭМН имеет определенное значение; ток мотора насоса, как правило, представляет собой ток, в среднем превышающий ток ЭМН в связи с циркуляцией тока через диод, когда ПТ выключен. (Мгновенный ток ЭМН по существу равен мгновенному току мотора насоса, когда ПТ включен. Когда ПТ выключен, мгновенный ток ЭМН равен нулю, при этом ток через катушку индуктивности мотора имеет некоторое положительное значение.) Электроэнергия в ЭМН поступает из аккумуляторной батареи транспортного средства, которая может представлять собой аккумуляторную батарею 12 В, а также из системы генератора переменного тока транспортного средства. Если не предпринимают никаких действий для «формирования тока» или «плавного пуска», ток ЭМН достигает пиковых значений от 30 до 35 ампер, например. Однако, если не подавать сразу полное шаговое напряжение полного напряжения аккумуляторной батареи/генератора переменного тока, можно уменьшить пиковое значение данного пускового тока, например, до уровня тока установившегося режима. Например, эффективное напряжение, подаваемое мотору насоса, можно формировать таким образом, чтобы выброс тока при пуске не превышал 10 ампер.
При эксплуатации ННД 208 в импульсном режиме эпюра давления подачи может быть пилообразной, как будет подробнее раскрыто на примере ФИГ. 3А-3С. Например, в импульсном режиме возможен быстрый рост давления до 6.5 бар с последующим линейным падением до 4.5 бар по мере расходования топлива. Несмотря на то, что данное изменение давления не может быть использовано в системах непосредственного впрыска, сведения о текущем давлении могут быть нужны в системах РВ.
В непрерывном режиме эксплуатации, управление ННД (например, регулирование уровня напряжения, подаваемого ННД) можно осуществлять по замкнутому контуру с обратной связью от одного или нескольких датчиков давления (например, датчиков 234, 235 и 236 давления) или по разомкнутому контуру независимо от данных обратной связи от датчика давления или без их учета. Аналогичным образом, в импульсном режиме эксплуатации, управлять ННД (например, регулировать уровень напряжения и/или коэффициент заполнения импульсов, подаваемых ННД) можно по замкнутому контуру с обратной связью от одного или нескольких датчиков давления (например, датчиков 234, 235 и 236 давления) или по разомкнутому контуру независимо от данных обратной связи от датчика давления или без их учета. При эксплуатации ННД 208 в импульсном режиме без обратной связи ННД можно эксплуатировать с питанием немного выше необходимого. При этом, несмотря на подачу ННД 208 питания немного выше необходимого во время во время эксплуатации в импульсном режиме без обратной связи, ННД может фактически потреблять значительно меньше энергии в импульсном режиме без обратной связи, чем при эксплуатации топливоподкачивающего насоса в непрерывном режиме.
На ФИГ. 1-2 представлены примеры конфигураций с относительным расположением различных компонентов. Если показано, что элементы непосредственно контактируют друг с другом или непосредственно соединены, то такие элементы могут называться непосредственно контактирующими или непосредственно соединенными, соответственно, по меньшей мере в одном примере. Аналогично, элементы, показанные соседними или смежными друг другу могут быть соседними или смежными друг другу соответственно, по меньшей мере в одном примере. Например, компоненты, находящиеся в поверхностном контакте друг с другом, могут называться находящимися в поверхностном контакте. Согласно другому примеру, элементы, расположенные отдельно друг от друга с некоторым промежутком между ними без других компонентов, могут так и называться, по меньшей мере в одном примере. Согласно иному примеру, элементы, показанные выше/ниже друг относительно друга, с противоположных сторон друг относительно друга или слева/справа друг относительно друга, могут так и быть обозначены, друг относительно друга. Кроме того, как показано на фигурах, самый высокий элемент или точка элемента может называться «верхом» компонента, а самый нижний элемент или точка элемента может называться «низом» компонента, по меньшей мере в одном примере. В контексте настоящей заявки, верх/низ, более высокий/более низкий выше/ниже, могут обозначать положения относительно вертикальной оси фигур и использоваться для описания расположения элементов на фигурах друг относительно друга. По существу, элементы, показанные выше других элементов, расположены вертикально выше других элементов, в одном примере. В ином примере, формы элементов, показанные на фигурах, могут называться имеющими такие формы (в частности, такие как круглые, прямые, плоские, изогнутые, сферические, скошенные, угловые или т.п.). Далее, элементы, показанные пересекающими друг друга, могут называться пересекающимися элементами или пересекающими друг друга, по меньшей мере в одном примере. Кроме того, элемент, показанный внутри другого элемента или показанный вне другого элемента, может так и называться, согласно одному примеру.
На ФИГ. 3А-3Е изображены графики изменений измеренного датчиком и фактического давлений подачи топливоподкачивающего насоса (например, ННД 208 с ФИГ. 2) во время импульсной эксплуатации в зависимости от времени. ФИГ. 3А иллюстрирует кривую, представляющую и измеренное датчиком давление подачи, и фактическое давление подачи во время импульсной эксплуатации, когда датчик давления, измеряющий давление подачи, функционирует надлежащим образом. ФИГ. 3В иллюстрирует две кривые, представляющие измеренное датчиком давление подачи и фактическое давление подачи, соответственно, во время импульсной эксплуатации с первым примером стратегии управления с обратной связью, когда датчик давления, измеряющий давление подачи, неисправен и выдает завышенные показания. ФИГ. 3С иллюстрирует две кривые, представляющие измеренное датчиком давление подачи и фактическое давление подачи, соответственно, во время импульсной эксплуатации с первым примером стратегии управления с обратной связью, когда датчик давления, измеряющий давление подачи, неисправен и выдает заниженные показания. ФИГ. 3D иллюстрирует две кривые, представляющие измеренное датчиком давление подачи и фактическое давление подачи, соответственно, во время импульсной эксплуатации со вторым примером стратегии управления с обратной связью, когда датчик давления, измеряющий давление подачи, неисправен и выдает завышенные показания. ФИГ. 3Е иллюстрирует две кривые, представляющие измеренное датчиком давление подачи и фактическое давление подачи, соответственно, во время импульсной эксплуатации со вторым примером стратегии управления с обратной связью, когда датчик давления, измеряющий давление подачи, неисправен и выдает заниженные показания.
Как видно из ФИГ. 3А-3Е, при подаче импульсов напряжения топливоподкачивающему насосу возникают давления подачи, образующие кривую с пилообразной эпюрой при построении графика по времени. В некоторых примерах во время импульсной эксплуатации топливоподкачивающего насоса в соответствии с первым примером стратегии управления с обратной связью, коэффициент заполнения импульсов, подаваемых топливоподкачивающему насосу (и, опционально, уровень напряжения питания) выбирают (например, заранее программируют в контроллере, динамически определяют в контроллере или устанавливают в контроллере в зависимости от параметров работы двигателя) так, чтобы при подаче каждого импульса напряжения питания топливоподкачивающему насосу происходил быстрый рост давления подачи до достижения необходимого пикового давления. При этом, в соответствии с вторым примером стратегии управления с обратной связью, топливоподкачивающему насосу подают заранее заданное высокое напряжение, если по результатам измерения будет установлено, что было достигнуто необходимое давление подачи впадины, а заранее заданное низкое напряжение (например, 0В или чуть выше 0В) подают топливоподкачивающему насосу, если по результатам измерения будет установлено, что достигнуто необходимое пиковое давление подачи, то есть измеренное датчиком давление подачи определяет длительность каждого импульса более высокого напряжения. Следует понимать, что можно использовать и другие стратегии управления с обратной связью без отступления от объема раскрываемого изобретения.
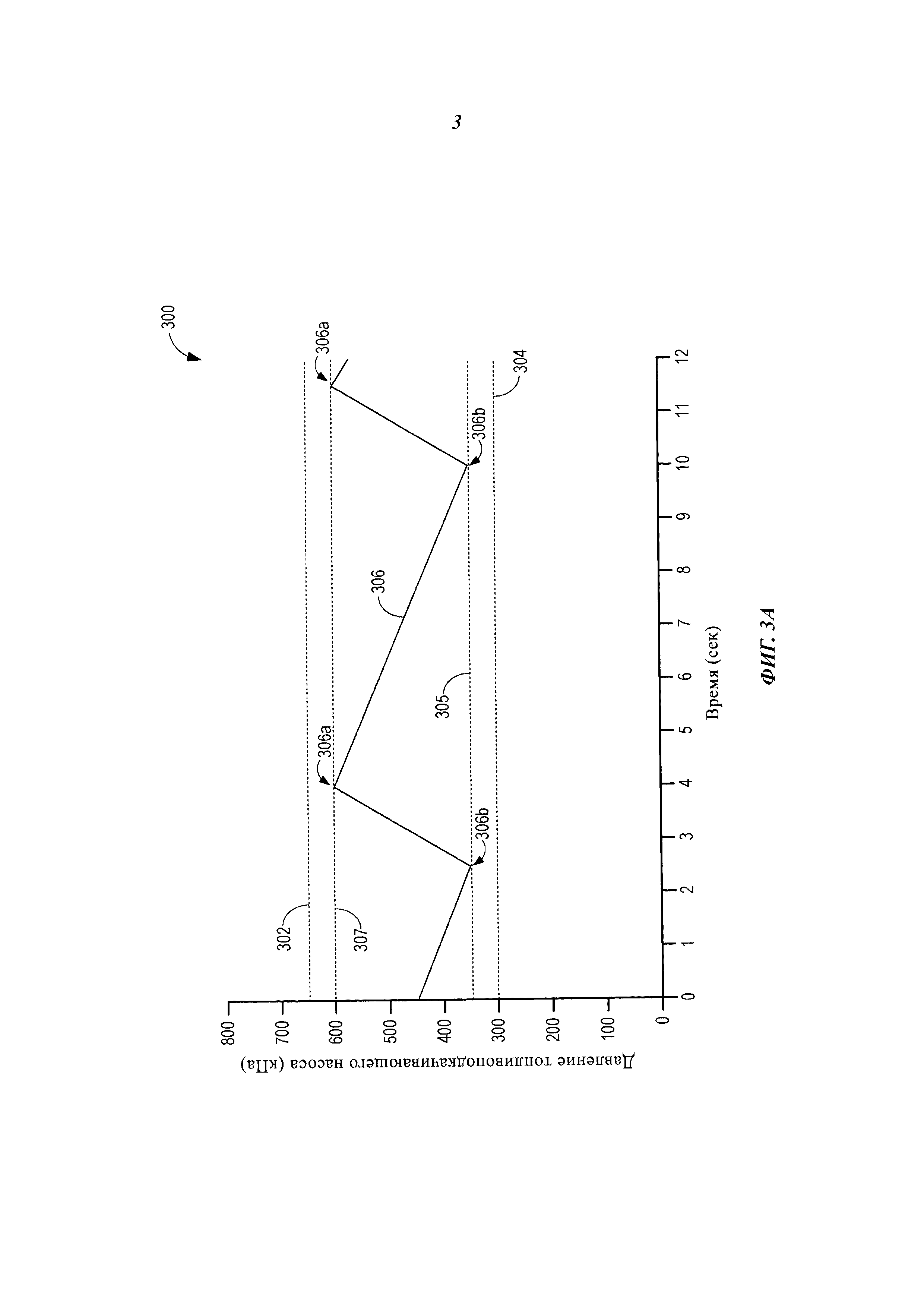
В примерах на ФИГ. 3А-3Е необходимое пиковое давление (штриховая линия 307) было выбрано ниже уставки давления клапана разгрузки давления (штриховая линия 302), а необходимое давление впадины (штриховая линия 305) было выбрано выше давления паров топлива (штриховая линия 304). Уставка давления и давление паров топлива могут представлять собой физические максимальное и минимальное давления топливной системы, соответственно. Например, как раскрыто выше на примере ФИГ. 2, уставка давления - это давление, при котором происходит открытие клапана разгрузки давления для стравливания давления из топливной системы (например, за счет возврата топлива в топливный бак). Кроме того, топливо находится в состоянии термодинамического равновесия между газовой и жидкой фазами, при этом пары топлива существуют при определенном давлении (например, давлении паров), зависящем от состава и температуры топлива. В отсутствие подачи дополнительного топлива топливоподкачивающим насосом, когда топливо впрыскивают топливными форсунками, давление подачи падает до давления паров топлива и не может падать дальше. Давление паров топлива может варьироваться от почти нулевого абсолютного давления при низких температурах окружающей среды до абсолютного давления 600+ кПа при повторных пусках из горячего состояния. Давление паров топлива - это минимальное давление, которое может быть достигнуто в топливной системе, пока в ней находится какой-либо количество жидкого топлива, что всегда имеет место в реальных транспортных средствах. В линии также может присутствовать нерастворенный воздух, в связи с чем давление немного превышает давление паров топлива, однако давление паров топлива все же задано в качестве минимального давления.
Включение питания мотора топливоподкачивающего насоса приводит к росту давления подачи, так что, при построении графика давления подачи по времени, он имеет вид направленной вверх линии. Когда мотор топливоподкачивающего насоса выключен, и напряжение, подаваемое топливоподкачивающему насосу, по существу равно 0В, и при этом происходит РВ или выкачивание топлива насосом НВ из данной зоны низкого давления топлива с постоянной скоростью, график давления подачи, отложенный во времени, имеет вид направленной вниз линии. Если расходование топлива (путем РВ или выкачивания насосом НВ) растет, возрастает наклон направленной вниз линии, и наоборот.
В примере графика 300 на ФИГ. 3А управление топливоподкачивающим насосом с обратной связью происходит надлежащим образом, и датчик давления, измеряющий давление подачи, выдает точные показания (например, исправен). Так как датчик давления выдает точные показания, выходной сигнал датчика давления точно отражает фактическое давление подачи. Соответственно, кривая 306 с пилообразной эпюрой отражает и выходной сигнал датчика давления, и фактическое давление подачи. Как показано, кривая 306 имеет пики 306а на уровне необходимого пикового давления (штриховая линия 307), которые ниже уставки давления 302 клапана разгрузки давления (тем самым обеспечивая запас между пиковым давлением и уставкой давления). Кривая 306 также имеет впадины 306b на уровне давления выше давления 304 паров топлива. При этом в других примерах необходимое пиковое давление может быть задано равным уставке давления, и/или может быть задан такой коэффициент заполнения импульсов, чтобы впадины кривой были равны давлению паров топлива.
В отличие от предыдущего, в примере графика 320 на ФИГ. 3В, датчик давления неисправен и выдает завышенные показания (кривая 309) по сравнению с фактическим давлением подачи (кривая 308). В данном примере реализуют первый пример стратегии управления с обратной связью. Соответственно, кривая 309 имеет ту же форму, что и кривая 308, но смещена вверх на графике, так как контроллер регулирует импульсы напряжения, подаваемые топливоподкачивающему насосу, в зависимости от (более высокого) измеренного датчиком давления подачи. А именно, контроллер снизил коэффициент заполнения импульсов напряжения, подаваемых топливоподкачивающему насосу, до значения ниже коэффициента заполнения, который был бы выбран, если бы датчик выдавал точные показания. В результате не происходит подача достаточного напряжения для достижения фактическим давлением подачи (кривая 308) необходимого пикового давления 307, и фактическое давление подачи падает относительно давления подачи при штатной работе датчика давления (например, представленного кривой 306 на ФИГ. 3А). Кроме того, в изображенном примере фактическое давление подачи упало до такой степени, что после подачи импульса напряжения топливоподкачивающему насосу во время впрыска топлива топливными форсунками, давление падает до давления паров топлива и остается на уровне давления паров топлива в течение некоторого периода (например, до того, как начнет вновь расти в связи с подачей следующего импульса напряжения), так что кривая 308 выглядит сглаженной в каждой впадине. Сглаживание впадины происходит из-за того, что фактическое давление не может упасть ниже давления 304 паров топлива, представляющего собой физический минимум системы. Данное сглаживание не соответствует давлению, характерному для фактического давления подачи, когда датчик функционирует исправно, причем фактическое давление подачи продолжает падать до тех пор, пока не происходит подача следующего импульса напряжения, в результате чего возникает резкий переход сигнала давления от спадающего фронта к нарастающему фронту при давлении впадины, например, так, что сигнал давления сохраняет минимальное значение в течение периода меньше порогового. Нормальные, заостренные впадины, которые образовались бы на кривой 308, если бы давление могло упасть ниже давления паров топлива, обозначены штриховыми линиями. Как и кривая 308, кривая 309 выглядит сглаженной в каждой впадине, но сглаживание возникает при измеренном давлении выше давления паров топлива из-за того, что датчик выдает завышенные показания.
В примере графика 330 на ФИГ. ЗС датчик давления в топливопроводе неисправен и выдает заниженные показания (кривая 311) по сравнению с фактическим давлением подачи (кривая 310). В данном случае также реализуют первый пример стратегии управления с обратной связью. Соответственно, кривая 311 имеет ту же форму, что и кривая 310, но смещена вниз на графике. В данном случае, контроллер регулирует импульсы напряжения, подаваемые топливоподкачивающему насосу, в зависимости от (более низкого) измеренного датчиком давления подачи посредством увеличения коэффициента заполнения импульсов напряжения, подаваемых топливоподкачивающему насосу, до значения выше коэффициента заполнения, который был бы выбран, если бы сигнал, выдаваемый датчиком давления, был точным. В результате фактическое давление подачи (кривая 310) в целом возрастает относительно давления подачи при штатной работе датчика давления (например, представленного кривой 306 на ФИГ. 3А). Поэтому напряжение, подаваемое ННД 208, выше, чем нужно для достижения необходимого пикового давления, что нежелательно, так как при этом падает эффективность и возрастает энергопотребление. Как показано, пики кривой 310 соответствуют давлению выше необходимого пикового давления 307. Кроме того, в изображенном примере фактическое давление подачи возросло настолько, что при подаче импульса напряжения топливоподкачивающему насосу, давление возрастает до уставки давления клапана разгрузки давления. Затем напряжение остается на уровне уставки давления в течение некоторого периода (например, до тех пор, пока вновь не начнет падать в связи с впрыском топлива топливными форсунками/перекачиванием насосом НВ), поэтому кривая 310 выглядит сглаженной в каждом пике. Это не соответствует давлению, характерному для фактического давления подачи, когда датчик функционирует исправно, причем фактическое давление подачи продолжает расти до тех пор, пока не произойдет расходование топлива за счет впрыска топлива в двигатель топливными форсунками, в результате чего возникает резкий переход сигнала давления от нарастающего фронта к спадающему фронту на уровне пикового давления, например, в связи с чем сигнал давления сохраняет максимальное значение в течение периода меньше порогового. Сглаживание пика обусловлено тем, что фактическое давление не может превысить уставку давления 302. Нормальные, несглаженные пики, которые возникали бы, если бы давление могло превысить уставку давления, обозначены штриховыми линиями. Как и кривая 310, кривая 311 выглядит сглаженной в каждом пике, но сглаживание происходит при измеренном давлении ниже уставки давления из-за заниженного показания датчика.
В контексте настоящего описания «сглаживание» измеренного датчиком давления подачи и фактического давления подачи означает событие, при котором кривая давления переходит от ненулевого наклона к нулевому наклону и сохраняет нулевой наклон (например, остается постоянной) дольше порогового периода. Например, сигнал измеренного датчиком давления может перейти от спадающего фронта к нулевому наклону, а затем к нарастающему фронту для впадины (как на ФИГ. 3В) или иным образом для пика (как на ФИГ. 3С), в каждом случае сохраняя нулевой наклон в течение порогового периода. Пороговый период может быть задан заранее при изготовлении двигателя и сохранен в долговременной памяти системы управления. Пороговый период также может быть пропорционален коэффициенту заполнения импульсов напряжения, подаваемых топливоподкачивающему насосу, и, в частности, может быть меньше длительности (ширины) каждого импульса напряжения. Сглаживание кривой давления может иначе именоваться «усечение кривой на пиках и впадинах» или «образование горизонтальных участков кривой» на максимальных и минимальных значениях.
В отличие от примеров графиков на ФИГ. 3В-3С, относящихся к импульсной эксплуатации ННД в соответствии с первым примером стратегии управления с обратной связью, примеры графиков на ФИГ. 3D-3E относятся к импульсной эксплуатации ННД в соответствии со вторым примером стратегии управления с обратной связью. В примере графика 340 на ФИГ. 3D датчик давления неисправен и выдает завышенные показания (кривая 313) по сравнению с фактическим давлением подачи (кривая 312). В данном примере реализуют второй пример стратегии управления с обратной связью. В начале кривой давление подачи падает, так как топливоподкачивающему насосу подают только минимальное напряжение (например, чуть выше 0), и происходит впрыск топлива. Если бы датчик давления функционировал исправно, он бы правильно измерил, что фактическое давление подачи достигло необходимого давления впадины, и в этот момент контроллер повысил бы напряжение, подаваемое топливоподкачивающему насосу, до более высокого напряжения. Однако, поскольку датчик давления выдает завышенные показания, контроллер не повышает напряжение, подаваемое топливоподкачивающему насосу, до более высокого напряжения, когда фактическое давление подачи достигает необходимого давления впадины; как показано, в то время измеренное датчиком давление подачи все еще выше необходимого давления впадины, поэтому не инициируют подачу топливоподкачивающему насосу импульсов более высокого напряжения. Таким образом, фактическое давление подачи продолжает падать до достижения измеренным датчиком давлением подачи необходимого давления впадины. В изображенном примере датчик давления завышает показания настолько, что фактическое давление подачи падает до давления паров топлива до того, как измеренное датчиком давление подачи упадет до необходимого давления впадины. Когда фактическое давление подачи достигнет давления паров топлива, оно не может падать дальше, в связи с чем остается постоянным на уровне давления паров топлива. Измеренное датчиком давление подачи также остается постоянным, но на более высоком значении, как показано. Так как более высокое значение выше необходимого давления впадины, контроллер не повышает напряжение, подаваемое топливоподкачивающему насосу, до более высокого напряжения, поэтому фактическое давление подачи остается постоянным на уровне давления паров топлива. Из-за этого двигатель может заглохнуть. Аналогичная проблема может возникнуть, если давление паров топлива выше значения давления паров топлива, сохраненного в контроллере. Например, если фактическое давление паров топлива увеличилось выше необходимого давления впадины (что может произойти из-за быстрого возрастания температуры топлива), измеренное датчиком давление не упадет до необходимого давления впадины, даже если датчик давления функционирует надлежащим образом. В данном случае контроллер опять не повысит напряжение, подаваемое ННД, до более высокого напряжения, так как ожидает падения давления подачи до необходимого давления впадины, в связи с чем двигатель может заглохнуть.
В примере графика 350 на ФИГ. 3Е датчик давления неисправен и выдает заниженные показания (кривая 315) по сравнению с фактическим давлением подачи (кривая 314). В данном примере реализуют второй пример стратегии управления с обратной связью. В начале кривой давление подачи падает, так как ННД подают только минимальное напряжение (например, чуть выше 0), и происходит впрыск топлива. Если бы датчик давления функционировал исправно, он бы правильно измерил, что фактическое давление подачи достигло необходимого давления впадины, в этот момент контроллер повысил бы напряжение, подаваемое ННД, до более высокого напряжения. Однако, поскольку датчик давления выдает заниженные показания, контроллер повышает напряжение, подаваемое ННД, до более высокого напряжения, когда измеренное датчиком давление подачи достигает необходимого давления впадины, что происходит до падения фактического давления подачи до необходимого давления впадины. Таким образом, фактическое давление подачи не достигает необходимого давления впадины, а начинает расти в связи с подачей ННД импульсов более высокого напряжения. В изображенном примере, датчик давления выдает настолько заниженные показания, что фактическое давление подачи возрастает до уставки давления клапана разгрузки давления до того, как измеренное датчиком давление подачи возрастет до необходимого пикового давления. Достигнув уставки давления клапана разгрузки давления, фактическое давление подачи не может расти дальше, в связи с чем остается постоянным на уровне уставки давления клапана разгрузки давления. Измеренное датчиком давление подачи также остается постоянным, но на более низком значении, как видно из графика. Так как данное более низкое значение ниже необходимого пикового давления, контроллер продолжает подавать ННД более высокое напряжение, поэтому фактическое давление подачи остается постоянным на уровне уставки давления клапана разгрузки давления. Это приводит к неблагоприятным последствиям в виде роста расходования топлива и сокращения срока службы топливной системы, так как давление подачи поддерживают на уровне выше того, что нужен при текущих параметрах работы двигателя.
В раскрытых выше примерах неисправности датчика датчик давления (например, датчик 234 или 235 с ФИГ. 2) может выдавать показания в пределах рабочего диапазона данного прибора, в связи с чем погрешность не будет выявлена способами, речь о которых шла выше. В отличие от них, согласно раскрываемому изобретению, сглаживание кривой давления подачи (например, давление подачи остается постоянным дольше порогового периода) может указывать на наличие неисправности датчика давления, даже если выходной сигнал датчика давления не выходит за пределы своего нормального рабочего диапазона, как раскрыто далее в настоящем описании. Более того, выявление такого сглаживания как такового может указывать на наличие неисправности датчика давления, в связи с чем определение других параметров (например, величин измеренного датчиком давления подачи) может быть ненужно. Это обеспечивает преимущество, состоящее в возможности упрощения процесса управления для диагностики датчика давления.
На ФИГ. 4 раскрыт пример алгоритма 400 для диагностики погрешности в пределах диапазона датчика давления, расположенного ниже по потоку от топливоподкачивающего насоса в топливной системе. Инструкции для осуществления алгоритма 400 и других раскрытых в настоящем описании алгоритмов (например, алгоритмов 500, 510, 530, 600, 700 и 1100) может реализовывать контроллер (например, контроллер 12 с ФИГ. 1) в соответствии с инструкциями в долговременной памяти контроллера и во взаимосвязи с сигналами от датчиков двигателя, например датчиков, раскрытых выше на примерах ФИГ. 1-2. При осуществлении раскрытых в настоящем описании алгоритмов контроллер может направлять сигналы различным исполнительным механизмам двигателя для регулирования его работы, как раскрыто ниже.
На шаге 402 алгоритм предусматривает осуществление управления импульсами напряжения, подаваемыми топливоподкачивающему насосу, по замкнутому контуру с обратной связью. Управление с обратной связью импульсами напряжения предусматривает получение контроллером данных обратной связи от датчика давления ниже по потоку от топливоподкачивающего насоса (например, датчика 234 или 235 давления с ФИГ. 2) и регулирование напряжения, подаваемого топливоподкачивающему насосу (например, посредством регулирования исполнительного механизма топливоподкачивающего насоса) в зависимости от данных обратной связи от датчика давления. Управление с обратной связью можно осуществлять в соответствии с первым или вторым примерами стратегии управления с обратной связью, раскрытыми в настоящем описании, или другой стратегией управления.
На шаге 404 алгоритм предусматривает определение того, выполнены ли условия для запуска диагностики погрешности в пределах диапазона датчика давления. В число условий для запуска может входить наличие выходного сигнала датчика давления в пределах заранее заданного нормального рабочего диапазона. Например, если датчик давления неисправен и его выходной сигнал выходит за пределы нормального рабочего диапазона (например, имеет место погрешность за пределами диапазона датчика давления), диагностика погрешности в пределах диапазона не нужна. При возникновении погрешности за пределами диапазона в контроллере может быть установлен соответствующий флаг бортовой диагностики БД (OBD), поэтому определение того, выполнены ли условия для запуска диагностики погрешности в пределах диапазона, может включать в себя проверку состояния этого флага БД. В число условий для запуска также могут входить работа двигателя в установившемся режиме и/или температура двигателя (например, температура охлаждающей жидкости двигателя) выше порога. Если условия для запуска не выполнены, например из-за наличия погрешности за пределами диапазона датчика, алгоритм завершают. В противном случае алгоритм следует на шаг 406.
На шаге 406 алгоритм предусматривает измерение давления подачи топливоподкачивающего насоса посредством датчика давления. Оно может включать в себя непрерывное измерение давления подачи топливоподкачивающего насоса в течение всего времени работы двигателя. После шага 406 алгоритм следует на шаг 408.
На шаге 408 алгоритм предусматривает отслеживание контроллером измеренного датчиком давления подачи на предмет сглаживания, например, согласно алгоритму на ФИГ. 7, раскрытому ниже.
Если на шаге 410 будет выявлено сглаживание, алгоритм следует на шаг 412 и указывает наличие погрешности в пределах диапазона датчика давления. В одном примере указание наличия погрешности в пределах диапазона датчика давления может включать в себя установку контроллером флага БД. Далее, на шаге 412, алгоритм предусматривает переход от схемы управления топливоподкачивающим насосом по замкнутому контуру к схеме управления по разомкнутому контуру, в которой топливоподкачивающий насос питают неизменным ненулевым напряжением, а данные обратной связи от датчика давления не учитывают. Переход к управлению топливоподкачивающим насосом по разомкнутому контуру позволяет продолжить эксплуатацию топливной системы, даже если датчик давления неисправен, пусть и с более низким КПД по сравнению с эксплуатацией топливоподкачивающий насос по замкнутому контуру, когда датчик давления исправен. После шага 412 алгоритм завершают.
Если на шаге 410 сглаживание не будет выявлено, алгоритм следует на шаг 414. На шаге 414 контроллер продолжает управление топливоподкачивающим насосом по замкнутому контуру. После шага 414 алгоритм 400 завершают.
На ФИГ. 5А раскрыт пример алгоритма 500 для осуществления управления топливоподкачивающим насосом по замкнутому контуру.
На шаге 502 алгоритм 500 предусматривает измерение или оценку параметров работы двигателя (например, состава топлива, расхода потока топлива из форсунок и текущего давления подачи топливоподкачивающего насоса).
На шаге 504 алгоритм предусматривает определение уставки давления и давления паров топлива. В одном примере уставку давления и давление паров топлива может динамически определять контроллер, как раскрыто ниже на примере ФИГ. 6. В другом примере уставка давления может иметь заранее заданное значение, сохраненное в долговременной памяти контроллера, при этом заранее заданное значение зависит от характеристик клапана разгрузки давления (например, клапана 211 разгрузки давления на ФИГ. 2) и характеристик топливной системы, а давление паров топлива можно вычислить в зависимости от измеренной датчиком температуры топлива и состава топлива.
На шаге 506 алгоритм предусматривает определение необходимых пикового давления подачи и давления подачи впадины топливоподкачивающего насоса. Необходимое пиковое давление подачи - это необходимое максимальное давление, создаваемое топливоподкачивающим насосом, а необходимое давление подачи впадины - необходимое минимальное давление, создаваемое топливоподкачивающим насосом. Необходимое пиковое давление подачи может быть ниже уставки давления на заранее заданный запас; аналогичным образом, необходимое давление подачи впадины может быть выше давления паров топлива на заранее заданный запас.
На шаге 508 алгоритм предусматривает осуществление управления топливоподкачивающим насосом по замкнутому контуру с обратной связью для достижения необходимых пикового давления подачи и давления подачи впадины, например в соответствии с первым примером стратегии управления с обратной связью, раскрытым в настоящем описании (см. ФИГ. 5В), вторым примером стратегии управления с обратной связью, раскрытым в настоящем описании (см. ФИГ. 5С), или третьим примером стратегии управления с обратной связью, раскрытым в настоящем описании (см. ФИГ. 11). После шага 508 алгоритм завершают.
На ФИГ. 5В раскрыт пример алгоритма 510 для осуществления первого примера стратегии управления с обратной связью, раскрытого в настоящем описании. Алгоритм 510 можно осуществлять вместе с алгоритмом 500 на ФИГ. 5А на шаге 508, например.
На шаге 512 алгоритм предусматривает определение величины импульсов ненулевого напряжения для подачи топливоподкачивающему насосу и коэффициента заполнения импульсов, который обеспечит необходимые пиковое давление подачи и давление подачи впадины, определенные алгоритмом 500 на шаге 506. Например, напряжение и/или коэффициент заполнения могут быть определены в контроллере по справочной таблице, хранящейся в долговременной памяти контроллера и указывающей соответствующее напряжение и коэффициент заполнения для заданных значений таких параметров, как давление паров топлива, уставка давления, необходимые пиковое давление подачи и давление подачи впадины топливоподкачивающего насоса, расход впрыска топлива, подача насоса НВ и т.п. Или же напряжение и/или коэффициент заполнения могут быть определены в контроллере с помощью функций, аргументами которых являются значения параметров (например, давления паров топлива, уставки давления, необходимых пикового давления подачи и давления подачи впадины, расхода впрыска топлива, подачи насоса НВ и т.п.), а значением - соответствующее напряжение и/или коэффициент заполнения для импульсов. Указанные напряжение и коэффициент заполнения могут быть выбраны таким образом, чтобы каждый импульс напряжения, подаваемый топливоподкачивающему насосу, повышал давление подачи до необходимого пикового давления, и так, чтобы, как только давление подачи упадет с необходимого пикового давления до необходимого давления впадины, происходила подача следующего импульса напряжения. В некоторых примерах во время импульсной эксплуатации топливоподкачивающего насоса всегда подают одно и то же ненулевое эффективное напряжение, а коэффициент заполнения импульсов изменяют в зависимости от изменений параметров работы двигателя.
На шаге 514 алгоритм предусматривает подачу топливоподкачивающему насосу импульсов напряжения, величина и коэффициент заполнения которых определены на шаге 512. Например, контроллер может направить сигнал исполнительному механизму топливоподкачивающего насоса, который, в свою очередь, подает топливоподкачивающему насосу импульсы напряжения с определенной величиной и определенным коэффициентом заполнения.
На шаге 516 алгоритм предусматривает отслеживание давления подачи топливоподкачивающего насоса (например, посредством датчика давления, например датчика 234 или 235 давления с ФИГ. 2). Отслеживание давления подачи топливоподкачивающего насоса можно осуществлять в течение некоторого периода, например, начинающегося, когда подают какой-либо импульс напряжения, и заканчивающегося, когда подают следующий импульс напряжения. Или же отслеживание давления подачи топливоподкачивающего насоса можно осуществлять непрерывно в течение всего времени работы двигателя.
После шага 516 алгоритм следует на шаг 518 для определения того, лежат ли измеренные датчиком пиковое давление подачи и давление подачи впадины в пределах заранее заданного диапазона необходимых пикового давления подачи и давления подачи впадины топливоподкачивающего насоса соответственно (например, приблизительно равны им). Определение того, что измеренные датчиком пиковое давление подачи и давление подачи впадины лежат в пределах заранее заданного диапазона, может включать в себя вычисление в контроллере разности измеренного датчиком пикового давления подачи и необходимого пикового давления подачи и сравнение абсолютного значения разности с порогом, а также вычисление в контроллере разности измеренного датчиком давления подачи впадины и необходимого давления подачи впадины и сравнение абсолютного значения разности с порогом. Если на шаге 514 будет установлено, что измеренные датчиком пиковое давление подачи и давление подачи впадины лежат в пределах заранее заданного диапазона необходимых пикового давления подачи и давления подачи впадины, алгоритм следует на шаг 520, и контроллер продолжает эксплуатацию в текущем режиме (например, продолжает осуществлять управление топливоподкачивающим насосом по замкнутому контуру без регулирования коэффициента заполнения/импульсов напряжения). После шага 520 алгоритм 500 совершает возврат.
При этом, если на шаге 518 будет установлено, что измеренные датчиком пиковое давление подачи и давление подачи впадины не являются приблизительно равными необходимым пиковому давлению подачи и давлению подачи впадины, алгоритм следует на шаг 522. На шаге 522 алгоритм предусматривает определение того, превышают ли (например, на заранее заданную величину) измеренные датчиком пиковое давление подачи и давление подачи впадины необходимые пиковое давление подачи и давление подачи впадины, соответственно.
Если измеренные датчиком пиковое давление подачи и давление подачи впадины превышают необходимые пиковое давление подачи и давление подачи впадины, соответственно, то алгоритм следует на шаг 524 и уменьшает коэффициент заполнения импульсов, подаваемых топливоподкачивающему насосу. Например, контроллер может направить сигнал исполнительному механизму топливоподкачивающего насоса для уменьшения коэффициента заполнения импульсов напряжения, подаваемых топливоподкачивающему насосу. В некоторых примерах, контроллер может выбрать уменьшение коэффициента заполнения, пропорциональное разности измеренных датчиком пикового давления подачи и давления подачи впадины и необходимых пикового давления подачи и давления подачи впадины. Так контроллер может в целом понизить величину напряжения, подаваемого топливоподкачивающему насосу, и, тем самым, понизить давление подачи топливоподкачивающего насоса. После шага 524 алгоритм совершает возврат.
Если на шаге 522 будет установлено, что измеренные датчиком пиковое давление подачи и давление подачи впадины меньше необходимого пикового давления подачи и давления подачи впадины, соответственно, алгоритм следует на шаг 526 и увеличивает коэффициент заполнения импульсов, подаваемых топливоподкачивающему насосу. Например, контроллер может направить сигнал исполнительному механизму топливоподкачивающего насоса для повышения коэффициента заполнения импульсов напряжения, подаваемых топливоподкачивающему насосу. В некоторых примерах контроллер может выбрать повышение коэффициента заполнения, пропорциональное разности измеренных датчиком пикового давления подачи и давления подачи впадины и необходимых пикового давления подачи и давления подачи впадины. Так контроллер может в целом увеличить общее напряжение, подаваемое топливоподкачивающему насосу, и, тем самым, увеличить пиковое давление подачи и давление подачи впадины топливоподкачивающего насоса. После шага 526 алгоритм совершает возврат.
В некоторых примерах алгоритм 500 можно осуществлять циклически во время управления топливоподкачивающим насосом по замкнутому контуру, благодаря чему контроллер может непрерывно регулировать величину напряжения, подаваемого топливоподкачивающему насосу, в зависимости от изменения необходимых пикового давления подачи и давления подачи впадины.
На ФИГ. 5С раскрыт пример алгоритма 530 для осуществления второго примера стратегии управления с обратной связью, раскрытого в настоящем описании. Алгоритм 530 можно осуществлять вместе с алгоритмом 500 на ФИГ. 5А на шаге 508, например.
На шаге 532 алгоритм предусматривает определение более высокого и более низкого уровней напряжения для подачи топливоподкачивающему насосу во время импульсной эксплуатации. Более высокий уровень напряжения может представлять собой заранее заданный уровень напряжения, который быстро повысит давление подачи до необходимого пикового давления (например, 8-12В), а напряжение более низкого уровня - заранее заданный уровень напряжения, достаточно низкий для поддержания питания топливоподкачивающего насоса (например, выше 0 В, но ниже 0,3 В), который существенно не повысит давление топлива. При подаче топливоподкачивающему насосу напряжения более высокого уровня, можно считать, что топливоподкачивающий насос находится во включенном состоянии, а при подаче топливоподкачивающему насосу напряжения более низкого уровня, можно считать, что топливоподкачивающий насос находится в выключенном состоянии, несмотря на продолжение подачи ему напряжения минимальной величины.
После шага 532 алгоритм следует на шаг 534, и контроллер подает определенное более высокое напряжение топливоподкачивающему насосу.
После шага 534 алгоритм следует на шаг 536, и контроллер определяет, равно ли измеренное датчиком давление подачи необходимому пиковому давлению подачи. Если нет, алгоритм продолжает отслеживать измеренное датчиком давление подачи до тех пор, пока оно не станет равно необходимому пиковому давлению подачи. Как раскрыто выше на примере ФИГ. 3Е, если датчик давления работает неисправно и выдает заниженные показания, измеренное датчиком давление подачи может никогда не достигнуть необходимого пикового давления подачи. В данном случае, алгоритм постоянно находился бы на шаге 534, что отрицательно повлияло бы на экономию топлива и срок службы топливной системы.
Как только контроллер определит, что измеренное датчиком давление подачи стало равно необходимому пиковому давлению подачи, алгоритм следует на шаг 538, и контроллер определяет, равно ли измеренное датчиком давление подачи необходимому давлению подачи впадины. Если нет, алгоритм продолжает отслеживать измеренное датчиком давление подачи до тех пор, пока оно не станет равно необходимому давлению подачи впадины. Как раскрыто выше на примере ФИГ. 3D, если датчик давления работает неисправно и выдает завышенные показания, измеренное датчиком давление подачи может никогда не достигнуть необходимого давления подачи впадины. В данном случае алгоритм постоянно находился бы на шаге 538, а двигатель мог бы заглохнуть из-за отсутствия достаточного давления топлива.
Следует понимать, что контроллер может прервать и/или приостановить осуществление алгоритма 530 для перехода к другой стратегии управления топливной системой или выключения двигателя.
На ФИГ. 6 раскрыт пример алгоритма 600 для определения уставки давления (например, физического максимального давления в топливной системе для текущих параметров работы двигателя) и давления паров топлива (например, физического минимального давления в топливной системе для текущих параметров работы двигателя). Согласно алгоритму 600, контроллер может запускать определение уставки давления во время работы двигателя с параметрами, при которых необходимые пиковое давление подачи и давление подачи впадины топливоподкачивающего насоса относительно высоки. Кроме того, контроллер может запустить определение давления паров топлива, когда необходимые пиковое давление подачи и давление подачи впадины топливоподкачивающего насоса относительно низки. Таким образом, динамическое определение уставки давления и давления паров топлива можно выполнять во время работы двигателя с периодичностью, позволяющей использовать преимущества колебаний необходимых пикового давления подачи и давления подачи впадины топливоподкачивающего насоса для сведения к минимуму регулировок работы двигателя, связанных с выполнением динамического определения.
На шаге 602 осуществление алгоритма начинают с измерения и/или оценки параметров работы двигателя, например, как раскрыто выше для алгоритма 500 на шаге 502.
На шаге 604 алгоритм предусматривает определение того, работает ли двигатель в установившемся режиме и прогрет ли он. Например, может быть установлено, что двигатель работает в установившемся режиме, если частота вращения двигателя остается по существу постоянной в течение по меньшей мере порогового периода. Кроме того, может быть установлено, что двигатель прогрет, если будет определено, что температура двигателя выше пороговой (например, по выходному сигналу датчика температуры охлаждающей жидкости двигателя). Алгоритм 600 совершает возврат, если двигатель не прогрет и не работает в установившемся режиме. В противном случае, если двигатель прогрет и работает в установившемся режиме, алгоритм следует на шаг 606.
На шаге 606 алгоритм предусматривает определение того, выполнены ли условия для запуска определения уставки давления. В одном примере в число условий для запуска определения уставки давления входит пиковое давление подачи выше порога и/или давление подачи впадины выше порога. В другом примере в число условий для запуска определения уставки давления входит нагрузка двигателя выше порога. Если на шаге 606 будет установлено, что условия для запуска определения уставки давления не выполнены, алгоритм следует на шаг 608 для определения того, выполнены ли условия для запуска определения давления паров топлива, которые будут подробнее раскрыты ниже. В противном случае, если условия для запуска определения уставки давления выполнены на шаге 606, алгоритм следует на шаг 610.
На шаге 610 алгоритм предусматривает повышение коэффициента заполнения импульсов напряжения, подаваемых топливоподкачивающему насосу, до тех пор, пока не произойдет сглаживание измеренного датчиком давления подачи насоса. Наличие сглаживания может быть установлено в соответствии с алгоритмом 700 на ФИГ. 7, раскрытым ниже. Сглаживание измеренного датчиком давления подачи представляет собой достижение физического предела топливной системы. В данном примере физическим пределом является уставка давления. Давление в топливной системе не может превысить данное давление; когда давление в топливной системе достигает уставки давления, происходит открытие клапана разгрузки давления, и топливо течет обратно в топливный бак. Клапан разгрузки давления остается открытым до тех пор, пока давление в топливной системе не упадет ниже уставки давления, в момент чего происходит закрытие клапана разгрузки давления.
На шаге 612 алгоритм предусматривает задание уставки давления, равной давлению, при котором произошло сглаживание. Так контроллер определяет максимально возможное давление подачи. Поскольку может возникнуть засорение или иная неисправность датчика давления топлива, например, данное значение может со временем меняться. Поэтому предпочтительно, чтобы контроллер периодически заново определял данное значение. В качестве примера, если известно максимальное давление системы, контроллер может различать погрешность в пределах диапазона датчика давления, как подробно раскрыто ниже на примере ФИГ. 7. Кроме того, если уставка давления известна с высокой точностью, контроллер может задать необходимое пиковое давление подачи ниже уставки давления на небольшой запас (например, 20 кПа). В одном неограничивающем примере, если будет определено, что уставка давления составляет 650 кПа, необходимое пиковое давление подачи может быть задано равным 630 кПа. Это позволяет уменьшить коэффициент заполнения импульсов напряжения, подаваемых топливоподкачивающему насосу для достижения необходимого пикового давления подачи, и, тем самым, увеличить экономию топлива.
После шага 612 алгоритм следует на шаг 614. На шаге 614 алгоритм предусматривает возврат к нормальному управлению топливоподкачивающим насосом по замкнутому контуру (например, путем выполнения алгоритма 500 на ФИГ. 5А). Например, это может включать в себя определение контроллером коэффициента заполнения для приведения в действие топливоподкачивающего насоса, который обеспечит приведение пикового давления подачи к необходимому пиковому давлению подачи, и управление исполнительным механизмом топливоподкачивающего насоса для приведения коэффициента заполнения импульсов напряжения, подаваемых топливоподкачивающему насосу, к определенному коэффициенту заполнения. Указанное приведение может включать в себя уменьшение коэффициента заполнения импульсов напряжения топливоподкачивающего насоса так, чтобы давление подачи оставалось ниже уставки давления. После шага 614 алгоритм следует на шаг 608.
На шаге 608 алгоритм предусматривает определение того, выполнены ли условия для запуска определения давления паров топлива. В одном примере в число условий для запуска определения давления паров топлива входят пиковое давление подачи меньше порога и/или давление подачи впадины меньше порога. В другом примере в число условий для запуска определения давления паров топлива входит нагрузка двигателя ниже порога. Если на шаге 608 будет установлено, что условия для запуска определения давления паров топлива не выполнены, алгоритм 600 завершают. В противном случае, если условия для запуска определения давления паров топлива выполнены, алгоритм следует на шаг 616.
На шаге 616 алгоритм предусматривает уменьшение коэффициента заполнения импульсов напряжения, подаваемых топливоподкачивающему насосу, до тех пор, пока не произойдет сглаживание давления подачи насоса (например, по результатам измерения датчиком 234 или 235 давления на ФИГ. 2). Наличие сглаживания может быть установлено в соответствии с алгоритмом 700 на ФИГ. 7, раскрытым ниже. Сглаживание измеренного датчиком давления подачи представляет собой достижение физического предела топливной системы. В данном примере физический предел - это давление паров топлива.
На шаге 618 алгоритм предусматривает задание давления паров топлива равным давлению, при котором происходит сглаживание, как определено на шаге 616. Так контроллер определяет минимальное давление подачи, возможное для топливной системы. Во время работы транспортного средства возможно колебание температуры топлива и, как следствие, изменение давления паров топлива. Алгоритм 600 позволяет точнее определить давление паров топлива, чем вычисление давления паров топлива по результатам измерения или опосредованного выведения состава и температуры топлива. Если давление паров топлива в данный момент времени известно с высокой точностью, топливную систему можно эксплуатировать при невысоком давлении, которое выше давления паров топлива, не рискуя потерять необходимый запас по давлению между давлением паров и давлением впрыска из-за колебания температуры. Например, данный способ можно применять вместо способа оперативной коррекции впрыска (Hot Injector Compensation), в котором уменьшают дозу топлива относительно целевой в связи с работой при более высоком давлении (например, 50 или 100 кПа) выше давления паров топлива. Кроме того, если известно минимальное давление системы, контроллер может различать погрешность в пределах диапазона датчика давления, как подробнее раскрыто ниже на примере ФИГ. 7.
На шаге 620 алгоритм предусматривает возврат к нормальному управлению топливоподкачивающим насосом по замкнутому контуру (например, путем выполнения алгоритма 500 на ФИГ. 5А). Например, это может включать в себя определение контроллером коэффициента заполнения для приведения в действие топливоподкачивающего насоса, который обеспечит приведение пикового давления подачи к необходимому пиковому давлению подачи, и управление исполнительным механизмом топливоподкачивающего насоса для приведения коэффициента заполнения импульсов напряжения, подаваемых топливоподкачивающему насосу, к определенному коэффициенту заполнения. Указанное приведение может включать в себя увеличение коэффициента заполнения импульсов напряжения топливоподкачивающего насоса так, чтобы давление подачи оставалось выше давления паров топлива. После шага 620 алгоритм совершает возврат.
На ФИГ. 7 раскрыт пример алгоритма 700 для диагностики погрешности в пределах диапазона датчика давления топлива. Погрешность в пределах диапазона может иметь место, когда выходной сигнал датчика давления, по-видимому, не выходит за пределы ожидаемого диапазона (например, напряжение выходного сигнала датчика является ненулевым, при этом стандартная отраслевая проверка на соответствие/несоответствие диапазону не указывает на то, что выходной сигнал выходит за пределы диапазона). При наличии погрешности в пределах диапазона, выходной сигнал датчика давления соответствует давлению выше или ниже фактического давления подачи, но остается в пределах диапазона нормального давления топливной системы.
На шаге 702 алгоритм предусматривает определение порогового периода, в течение которого измеренное датчиком давление должно оставаться постоянным при исправной работе датчика. Например, как раскрыто выше на примере ФИГ. 3А-3Е, во время импульсной эксплуатации топливоподкачивающего насоса, давление подачи имеет пилообразную эпюру колебаний, содержащую острые пики и впадины. Пороговый период может представлять собой наибольший период, в течение которого ожидают, что давление останется при пиковом давлении или при давлении впадины для текущих параметров работы. Пороговый период может быть определен эмпирически, например, при изготовлении транспортного средства, и сохранен в долговременной памяти контроллера, например, в справочной таблице, содержащей пороговые периоды, соответствующие разным параметром работы, например, разной длительности импульсов напряжения, подаваемых топливоподкачивающему насосу. Как раскрыто ниже на примере ФИГ. 9, пороговый период в тот или иной момент времени может быть по существу меньше длительности импульсов напряжения, подаваемых топливоподкачивающему насосу в этот момент.
На шаге 704 алгоритм предусматривает отслеживание измеренного датчиком давления подачи (например, измеренного датчиком 234 или 235 на ФИГ. 2). В некоторых примерах отслеживание может быть прекращено, как только будет установлено, что измеренное датчиком давление подачи остается постоянным дольше порогового периода, даже если это произойдет до окончания подачи первого импульса напряжения во время отслеживания. В других примерах отслеживание можно осуществлять во время подачи заранее заданного количества импульсов напряжения топливоподкачивающему насосу, независимо от того, остается ли измеренное датчиком давление подачи постоянным дольше порогового периода, до того, как будет подано заранее заданное количество импульсов напряжения. Заранее заданное количество может составлять один, два, три или любое другое количество импульсов напряжения.
На шаге 706 алгоритм предусматривает определение того, оставалось ли измеренное датчиком давление подачи постоянным дольше порогового периода, например порогового периода, определенного на шаге 702. В некоторых примерах, если измеренное датчиком давление подачи остается постоянным, происходит прерывание. Если будет установлено, что измеренное датчиком давление подачи оставалось постоянным дольше порогового периода, алгоритм следует на шаг 708, и контроллер указывает наличие погрешности в пределах диапазона (например, путем установки флага БД). После шага 708 алгоритм совершает возврат.
Если на шаге 706 будет установлено, что измеренное датчиком давление не остается постоянным дольше порогового периода во время отслеживания, алгоритм следует на шаг 710, и контроллер указывает отсутствие погрешности в пределах диапазона датчика давления (например, не устанавливая флаг БД). После шага 710 алгоритм совершает возврат.
На ФИГ. 8 представлен пример диаграммы 800, иллюстрирующей рассматриваемые сигналы во время динамического определения уставки давления и давления паров топлива топливной системы, например, в соответствии с алгоритмом 600 на ФИГ. 6. На диаграмме 800 представлены: уставка давления на графике 802, давление паров топлива на графике 804, необходимое (например, заданное командой) давление подачи на графике 806, напряжение, подаваемое топливоподкачивающему насосу, на графике 808, измеренное датчиком давление подачи топливоподкачивающего насоса на графике 810, нагрузка двигателя на графике 812 и температура двигателя на графике 814. Для всех вышеуказанных графиков ось X представляет время, значения которого увеличиваются слева направо по оси X. Ось Y каждого отдельного графика соответствует обозначенному параметру, значение которого увеличивается снизу вверх. Кроме того, линия 816 представляет первое верхнее пороговое значение нагрузки двигателя, линия 818 - второе нижнее пороговое значение нагрузки двигателя, а линия 820 - пороговое значение температуры двигателя.
Ожидаемое физическое поведение топливной системы состоит в том, что уставка 802 давления клапана разгрузки давления является постоянной на весь срок службы. В отличие от нее, давление 804 паров топлива зависит от состава топлива и тесно связано с температурой топлива. Поэтому оно будет существенно меняться по мере прогрева транспортного средства в ходе работы. При этом ожидают, что, за счет соблюдения требований к составу топлива и наличия соответствующих конструктивных мер, максимальное давление паров топлива не выйдет за пределы значения наиболее неблагоприятного варианта. При нормальной эксплуатации необходимое пиковое давление задают ниже уставки 802 давления клапана разгрузки давления, а необходимое давление впадины задают выше давления 804 паров топлива. Однако, для выявления значений каждого из этих параметров, контроллер может намеренно нарушить нормальный показатель.
Между t0 и t1 эксплуатация топливоподкачивающего насоса может происходить по схеме управления по замкнутому контуру, например, в соответствии с алгоритмом 500 на ФИГ. 5А. Контроллер, например контроллер 12 с ФИГ. 1, направляет сигнал исполнительному механизму топливоподкачивающего насоса, по которому исполнительный механизм подает импульсы ненулевого напряжения топливоподкачивающему насосу с коэффициентом заполнения, который обеспечит характеристику 806 необходимого давления подачи. Как показано, характеристика 806 необходимого давления подачи может меняться в зависимости от нагрузки двигателя. Импульсы питающего напряжения, подаваемые топливоподкачивающему насосу для получения характеристики 806 необходимого давления подачи, представлены на графике 808. Давление подачи топливоподкачивающего насоса, измеряемое датчиком (например, датчиком 234 или 235 давления на ФИГ. 2) и представленное на графике 810, растет в связи с подачей напряжения топливоподкачивающему насосу. В промежутках между питающими импульсами, когда топливоподкачивающему насосу подают нулевое напряжение, давление подачи топливоподкачивающего насоса падает в связи с потреблением топлива двигателем.
Динамическое определение давления паров топлива и уставки давления может обеспечивать преимущество, состоящее в максимальном повышении экономии топлива, как подробно раскрыто выше на примере ФИГ. 6. При этом для осуществления динамического определения давления паров топлива или уставки давления, двигатель должен работать в установившемся режиме и быть прогрет, а также должны быть выполнены соответствующие условия для запуска. В примере на диаграмме 800, между t0 и t1 двигатель работает в установившемся режиме, поэтому нагрузка 812 двигателя остается по существу постоянной. Температура 814 двигателя выше штриховой линии 820 порогового значения, указывая на то, что двигатель прогрет. Нагрузка двигателя выше первого верхнего порогового значения 816. Поэтому в момент t1 условия для запуска определения уставки давления выполнены. При этом в других примерах, до начала определения уставки давления может быть нужно выполнить дополнительные условия для запуска.
Между t1 и t2 диаграммы 800 контроллер определяет уставку 802 давления, являющуюся максимальным давлением подачи, возможным в топливной системе в связи с наличием клапана разгрузки давления. Как показано, для определения максимального давления подачи, контроллер увеличивает коэффициент заполнения импульсов 808 напряжения, подаваемых топливоподкачивающему насосу, в момент t1. Данное увеличение не обусловлено изменением параметров работы двигателя (например, возрастанием нагрузки двигателя) или возрастанием необходимого (например, запрошенного или заданного командой) давления подачи; данное увеличение осуществляют исключительно для определения максимального давления подачи топливной системы, соответствующего уставке давления клапана разгрузки давления. Например, несмотря на то, что нагрузка 812 двигателя остается по существу постоянной между t0 и t1, контроллер увеличивает коэффициент заполнения импульсов напряжения, подаваемых топливоподкачивающему насосу, для осуществления динамического определения уставки давления.
Когда измеренное датчиком давление 810 подачи достигает уставки 802 давления, на кривой измеренного датчиком давления подачи возникает характеристика сглаженного пика. В изображенном примере давление подачи достигает уставки давления во время подачи первого импульса напряжения с увеличенной длительностью импульса. При этом в других примерах линейное увеличение коэффициента заполнения можно осуществлять постепенно, чтобы измеренное датчиком давление подачи не достигло уставки давления до тех пор, пока не будет подано несколько импульсов напряжения, что обеспечивает преимущество, состоящее в менее резком повышении давления топлива, подаваемого топливным форсункам. Постепенное линейное увеличение коэффициента заполнения также позволяет выявлять сглаженные пики с одновременным сведением к минимуму роста давления подачи, благодаря чему давление подачи остается ближе к оптимальному давлению подачи для текущих параметров работы двигателя.
На диаграмме 800 уставка давления составляет 650 кПа, при этом происходит сглаживание кривой измеренного датчиком давления подачи (оно остается постоянным) при 650 кПа в течение нетривиального периода. Данная конкретная уставка давления приведена исключительно для примера; уставка давления варьируется в зависимости от характеристик клапана разгрузки давления и топливной системы.
В изображенном примере контроллер продолжает отслеживать измеренное датчиком давление подачи после выявления сглаживания; а именно, после выявления случая сглаживания, подают другой импульс напряжения, так что сглаживание сигнала давления подачи происходит дважды на пике. Подача одного или нескольких дополнительных импульсов напряжения с длительностью импульса, увеличенной относительно номинальной длительности импульса, даже после выявления первого случая сглаживания может обеспечить преимущество, состоящее в снижении вероятности ложноположительного выявления сглаживания (например, при возникновении какой-либо аномалии, приводящей к временному сглаживанию сигнала измеренного датчиком давления подачи, не отражающему фактическую уставку давления). При этом в других примерах контроллер может завершить определение уставки давления, как только будет выявлено сглаживание, и заменить сохраненную уставку давления на значение давления, при котором произошло сглаживание. Это позволяет ограничить период времени, в течение которого контроллер повышает напряжение, подаваемое топливоподкачивающему насосу, для выполнения определения и, тем самым, увеличить экономию топлива.
Выявив сглаживание кривой измеренного датчиком давления подачи, контроллер сравнивает давление, при котором произошло сглаживание измеренного датчиком давления подачи, с предыдущей определенной уставкой давления, сохраненной в долговременной памяти. Так как уставка давления подвержена изменениям с течением времени (например, из-за засорения клапана разгрузки давления или изменения других параметров топливной системы), может быть нужно периодически заново определять уставку давления; для этого алгоритм 600 можно выполнять периодически или, в опциональном варианте, непрерывно во время импульсной эксплуатации топливоподкачивающего насоса. В других примерах алгоритм 600 можно выполнять только при начале импульсной эксплуатации топливоподкачивающего насоса.
В момент t2 контроллер завершает процесс определения уставки давления и совершает возврат к эксплуатации топливоподкачивающего насоса по схеме управления по замкнутому контуру, раскрытой в алгоритме 500 на ФИГ. 5А. Например, как показано, контроллер может понизить коэффициент заполнения импульсов 808 напряжения, подаваемых топливоподкачивающему насосу, до значения, соответствующего текущим параметрам работы двигателя (например, значения, применявшегося с t0 до t1).
Между t2 и t3 нагрузка 812 двигателя падает до уровня ниже второго порога 818. Падение нагрузки двигателя может произойти из-за изменения в работе двигателя (например, перехода к работе на холостом ходу или движения транспортного средства вниз по склону). Кроме того, температура 814 двигателя выше штриховой линии 820 порогового значения, указывая на то, что двигатель прогрет. Поэтому в момент t3 условия для запуска определения давления паров топлива выполнены. При этом в других примерах может быть нужно, чтобы были выполнены дополнительные условия для запуска перед началом определения давления паров топлива. Например, поскольку давление паров топлива зависит от температуры топлива в топливной системе, в число условий для запуска может входить температура топлива, остающаяся по существу постоянной в течение по меньшей мере порогового периода.
После того, как в момент t3 будет установлено, что условия для запуска выполнены, контроллер изменяет работу топливоподкачивающего насоса для определения давления паров топлива путем уменьшения коэффициента заполнения импульсов 808 напряжения, подаваемых топливоподкачивающему насосу. Данное уменьшение не обусловлено изменением параметров работы двигателя (например, падением нагрузки двигателя) или снижением необходимого (например, запрошенного или заданного командой) давления подачи; данное уменьшение осуществляют исключительно для определения максимального давления подачи топливной системы, соответствующего уставке давления клапана разгрузки давления. Например, несмотря на то, что нагрузка 812 двигателя оставалась по существу постоянной с периода времени непосредственно перед t3 и до t3, контроллер уменьшает коэффициент заполнения импульсов напряжения, подаваемых топливоподкачивающему насосу, в момент t3 для выполнения динамического определения давления паров топлива.
Когда давление 810 подачи достигает давления 804 паров топлива, на кривой измеренного датчиком давления подачи возникает характеристика сглаженной впадины. В изображенном примере давление подачи достигает давления паров топлива после подачи первого импульса напряжения с уменьшенной длительностью импульса и до подачи второго импульса напряжения с уменьшенной длительностью импульса. При этом в других примерах уменьшение коэффициента заполнения можно осуществлять постепенно, чтобы измеренное датчиком давление подачи не достигло давления паров топлива до тех пор, пока не будет подано несколько импульсов напряжения, что обеспечивает преимущество, состоящее в менее резком понижении давления топлива, подаваемого топливным форсункам. Кроме того, постепенное уменьшение коэффициента заполнения позволяет выявлять сглаженные впадины с одновременным сведением к минимуму падения давления подачи, благодаря чему оно остается ближе к оптимальному давлению подачи для текущих параметров работы двигателя.
На диаграмме 800 давление паров топлива составляет 300 кПа, и при 300 кПа происходит сглаживание кривой измеренного датчиком давления подачи (давление подачи остается постоянным) в течение нетривиального периода. Данное конкретное давление паров топлива приведено исключительно для примера; давление паров топлива будет варьироваться в зависимости от параметров работы топливной системы (например, температуры топлива). Поэтому может быть целесообразно периодически заново определять давление паров топлива.
В изображенном примере контроллер продолжает отслеживать измеренное датчиком давление подачи после выявления сглаживания; а именно, после выявления случая сглаживания, подают другой импульс напряжения, так что сглаживание сигнала давления подачи происходит дважды на впадине. Как раскрыто выше на примере определения уставки давления, подача одного или нескольких дополнительных импульсов напряжения с длительностью импульса, уменьшенной относительно номинальной длительности импульса, даже после выявления первого случая сглаживания может обеспечить преимущество, состоящее в возможности снижения вероятности ложноположительного выявления сглаживания (например, когда возникает какая-либо аномалия, приводящая к временному сглаживанию сигнала измеренного датчиком давления подачи, не отражающему фактическое давление паров топлива). При этом в других примерах контроллер может завершить процесс определения давления паров топлива, как только будет выявлено сглаживание, и заменить сохраненное давление паров топлива на значение давления, при котором произошло сглаживание. Это позволяет ограничить период времени, в течение которого изменяют давление подачи относительно запрошенного давления подачи для осуществления определения, и, тем самым, улучшить работу двигателя.
Выявив сглаживание кривой измеренного датчиком давления подачи, контроллер сохраняет давление, при котором произошло сглаживание измеренного датчиком давления подачи, в долговременной памяти в качестве давления паров топлива. Алгоритм 600 можно выполнять периодически или, в качестве опционального варианта, непрерывно во время импульсной эксплуатации топливоподкачивающего насоса для повышения точности управления по замкнутому контуру. В других примерах алгоритм 600 можно выполнять только при начале импульсной эксплуатации топливоподкачивающего насоса.
Определив давление паров топлива, контроллер совершает возврат к эксплуатации топливоподкачивающего насоса по схеме управления по замкнутому контуру, раскрытой в алгоритме 500 на ФИГ. 5А. Например, контроллер может отрегулировать коэффициент заполнения импульсов 808 напряжения, подаваемых топливоподкачивающему насосу, до значения, соответствующего текущим параметрам работы двигателя (например, текущей характеристике необходимого давления подачи топливоподкачивающего насоса, представленной кривой 806).
Несмотря на то, что диаграмма 800 иллюстрирует осуществление динамического определения уставки давления, вскоре после чего осуществляют динамическое определение давления паров топлива, данная последовательность событий является не более чем примером. Динамическое определение уставки давления можно осуществлять в любое время при выполнении соответствующих условий для запуска (в том числе, нагрузки двигателя выше первого верхнего порога); аналогичным образом, динамическое определение давления паров топлива можно осуществлять в любое время при выполнении соответствующих условий для запуска (в том числе, нагрузки двигателя ниже второго нижнего порога).
В примерах, где транспортное средство, содержащее топливную систему, представляет собой гибридное транспортное средство, нагрузку двигателя можно повышать или понижать, когда нужно определить уставку давления или давление паров топлива, даже если нагрузка двигателя выходит за пределы соответствующего диапазона (например, выше первого верхнего порога или ниже второго нижнего порога), путем увеличения или уменьшения нагрузки на двигатель на некоторую величину за счет электрического мотора и аккумуляторной батареи. Например, вместо того, чтобы ожидать до тех пор, пока нагрузка двигателя не превысит первый верхний порог, для определения уставки давления, нагрузку двигателя можно увеличить выше первого верхнего порога, а избыточную отдачу двигателя можно преобразовать в электроэнергию посредством электрического мотора (работающего в режиме генерации) и сохранить в устройстве накопления энергии. И наоборот, вместо того, чтобы ждать до тех пор, пока нагрузка двигателя упадет ниже второго нижнего порога, для определения давления паров топлива, нагрузку двигателя можно уменьшить до уровня ниже второго нижнего порога, и задействовать аккумуляторную батарею и электрический мотор (работающий в режиме мотора) с возможностью подачи дополнительного крутящего момента колесам транспортного средства так, чтобы запрошенный крутящий момент продолжал поступать на колеса транспортного средства несмотря на снижение нагрузки двигателя.
Кроме того, в примерах, где транспортное средство, содержащее топливную систему, представляет собой гибридное транспортное средство, и применяют робастную стратегию управления с обратной связью, можно отслеживать объем топлива, всосанного двигателем, когда топливоподкачивающий насос выключен. Если объем топлива, всосанного двигателем, когда топливоподкачивающий насос выключен, достигнет заранее заданного объема до того, как выходной сигнал датчика давления упадет до необходимого давления впадины, можно включить топливоподкачивающий насос, сохранить значение выходного сигнала датчика давления в качестве первого сохраненного значения, и запросить динамическое определение давления паров топлива топливной системы. Как сказано выше, если объем топлива, всосанного двигателем, когда топливоподкачивающий насос выключен, превышает ожидаемое количество для текущих параметров работы, а необходимое давление впадины еще не было достигнуто, это указывает на то, что либо датчик выдает неправильные показания, либо произошло изменение давления паров топлива (например, оно превысило необходимое давление впадины). Для того, чтобы распознать, какая именно из этих проблем имеет место, контроллер может осуществить динамическое определение давления паров топлива путем понижения давления в топливной рампе до тех пор, пока оно не прекратит дальнейшее падение. Это можно сделать без ущерба для необходимой работы двигателя в состояниях, когда запрошенный крутящий момент на выходном валу двигателя превышает порог, за счет мотора-генератора, дополняющего крутящий момент на выходном валу двигателя. Таким образом, если запрошенный крутящий момент на колесе транспортного средства превышает первый порог, контроллер может направить сигналы исполнительным механизмам для механического соединения коленчатого вала двигателя с мотором-генератором и понижения нагрузки двигателя до тех пор, пока выходной сигнал датчика давления не останется постоянным в течение по меньшей мере первого порогового периода, с одновременным преобразованием электроэнергии в крутящий момент посредством мотора-генератора и подачей крутящего момента на колеса транспортного средства. Давление, при котором выходной сигнал остается постоянным, можно сохранить в качестве обновленного давления паров топлива и, если обновленное давление паров топлива ниже первого сохраненного значения, контроллер может указать, что датчик давления выдает завышенные показания. В данном случае затем можно выполнить калибровку выходного сигнала датчика с учетом разности обновленного давления паров топлива и первого сохраненного значения. В противном случае, контроллер может указать, что датчик давления выдает правильные показания и исправен, и осуществлять последующее управление топливоподкачивающим насосом с обратной связью в зависимости от обновленного давления паров топлива.
Аналогичным образом, во время импульсной эксплуатации топливоподкачивающего насоса, можно отслеживать период включенного состояния топливоподкачивающего насоса; если период включенного состояния топливоподкачивающего насоса достигнет калиброванного максимального периода включенного состояния до того, как выходной сигнал датчика давления возрастет до необходимого пикового давления, топливоподкачивающий насос можно выключить, сохранить значение выходного сигнала датчика давления в качестве второго сохраненного значения и запросить динамическое определение уставки давления клапана разгрузки давления. Как сказано выше, если топливоподкачивающий насос остается во включенном состоянии в течение калиброванного максимального периода включенного состояния, а необходимое пиковое давление еще не достигнуто, это указывает на то, что либо датчик выдает неправильные показания, либо произошло изменение уставки давления клапана разгрузки давления (например, ее снижение относительно сохраненного значения). Для того, чтобы распознать, какая именно из этих проблем имеет место, контроллер может осуществить динамическое определение уставки давления путем повышения давления в топливной рампе до тех пор, пока оно не перестанет расти. Это можно сделать без ущерба для необходимой работы двигателя в состояниях, когда запрошенный крутящий момент на выходном валу двигателя ниже порога, за счет поглощения мотором-генератором избыточного крутящего момента на выходном валу двигателя. Таким образом, если запрошенный крутящий момент на колесах транспортного средства ниже второго порога, контроллер может направить сигналы исполнительным механизмам для механического соединения коленчатого вала с мотором-генератором, повышения нагрузки двигателя до тех пор, пока выходной сигнал датчика давления не останется постоянным в течение по меньшей мере второго порогового периода, с одновременным преобразованием части крутящего момента на выходном валу двигателя в электроэнергию посредством мотора-генератора и аккумулированием электроэнергии в аккумуляторной батарее, и сохранить давление, при котором выходной сигнал остается постоянным, в качестве обновленной уставки давления. Если обновленная уставка давления превышает второе сохраненное значение, контроллер может указать, что датчик давления выдает заниженные показания. В данном случае можно выполнить последующую калибровку выходного сигнала датчика с учетом разности обновленной уставки давления и второго сохраненного значения. В противном случае, контроллер может указать, что датчик давления выдает правильные показания и исправен, и осуществлять последующее управление топливоподкачивающим насосом с обратной связью в зависимости от обновленной уставки давления.
На ФИГ. 9 раскрыт пример диаграммы 900, иллюстрирующей рассматриваемые сигналы для диагностики погрешности в пределах диапазона датчика давления, измеряющего давление подачи топливоподкачивающего насоса, например, в соответствии с алгоритмом 700 на ФИГ. 7. На диаграмме 900 представлены: заданное командой давление подачи топливоподкачивающего насоса на графике 902, напряжение, подаваемое топливоподкачивающему насосу, на графике 904, измеренное датчиком давление подачи на графике 906, указание выполнения условий для запуска на графике 912 и указание наличия погрешности в пределах диапазона датчика давления на графике 916. Кроме того, символически представлены уставка давления в виде штриховой линии 908 и давление паров топлива в виде штриховой линии 910. Для всех вышеуказанных графиков ось X представляет время, значения которого увеличиваются слева направо по оси X. Ось Y графиков 902, 904 и 906 соответствует обозначенному параметру, значение которого увеличивается снизу вверх.
С t0 до t1 контроллер осуществляет управление по замкнутому контуру импульсами напряжения, подаваемыми топливоподкачивающему насосу (например, в соответствии с первым или вторым примерами стратегии управления с обратной связью, раскрытыми в настоящем описании). Как видно из графика 904, импульсы подаваемого напряжения имеют длительность 905 импульса. При импульсной эксплуатации возникает кривая измеренного датчиком давления подачи пилообразной формы, как видно из графика 906. До t1 условия для запуска диагностики погрешности в пределах диапазона датчика давления не выполнены. Например, температура двигателя ниже порога, двигатель не работает в установившемся режиме, и/или не выполнены иные условия для запуска. Кроме того, в этот период времени наличие погрешности в пределах диапазона датчика давления не указано (например, флаг БД, представляющий погрешность в пределах диапазона датчика давления, не установлен).
В момент t1, как видно из графика 912, контроллер указывает, что условия для запуска диагностики погрешности в пределах диапазона датчика давления выполнены (например, на основании измерений и/или опосредованного выведения сигналов, представляющих значения нагрузки двигателя, температуры двигателя и т.п.). В ответ на это указание контроллер запускает алгоритм для диагностики погрешности в пределах диапазона датчика давления, например алгоритм 700 на ФИГ. 7. Это может включать в себя: сначала определение порогового периода, в течение которого измеренное датчиком давление подачи должно оставаться постоянным при исправной работе датчика. На диаграмме 900 пример порогового периода представлен на 918. Контроллер может опционально устанавливать пороговый период в зависимости от длительности импульса, например, как долю длительности импульса. Например, контроллер может выполнить логическое определение соответствующего порогового периода для текущих параметров работы двигателя и топливной системы на основе логических формул, представляющих собой функцию длительности импульса. В изображенном примере пороговый период 918 меньше длительности 905 импульса. Следует понимать, что пороговый период может быть существенно меньше длительности импульса (например, менее 1/100 длительности импульса) без отступления от объема раскрываемого изобретения.
С t1 по t2 контроллер выполняет диагностический алгоритм посредством отслеживания измеренного датчиком давления подачи для определения того, остается ли оно постоянным (например, происходит ли его сглаживание) дольше порогового периода. Как видно из графика 906, датчик работает в пределах диапазона с ожидаемым пилообразным выходным сигналом до момента незадолго до t2. При этом погрешность в пределах диапазона датчика начинает возникать незадолго до t2; в момент t2 измеренное датчиком давление подачи оставалось постоянным в течение порогового периода. В данном примере сглаживание происходит на впадине кривой, что говорит о том, что датчик давления выдает завышенные показания. При этом при выполнении диагностики контроллер может не учитывать величину давления, при которой происходит сглаживание, и не отличать друг от друга сглаживания впадин и пиков (например, диагностику выполняют без учета величины давления, при которой измеренный сигнал остается постоянным). Такая работа может обеспечить преимущество, состоящее в упрощении стратегии управления.
Выявив в момент t2, что измеренное датчиком давление подачи оставалось постоянным в течение порогового периода, контроллер указывает наличие погрешности в пределах диапазона датчика давления, как видно из графика 916. Кроме того, в момент t2 контроллер переходит от управления топливоподкачивающим насосом по замкнутому контуру, при котором топливоподкачивающему насосу подают импульсы напряжения, к управлению топливоподкачивающим насосом по разомкнутому контуру, при котором топливоподкачивающему насосу подают неизменное ненулевое напряжение. Например, как видно из графика 904, неизменное ненулевое напряжение топливоподкачивающему насосу подают, начиная с t2. В связи с подачей неизменного ненулевого напряжения, происходит линейное повышение измеренного датчиком давления подачи до давления выше среднего давления пилообразной кривой, а затем оно остается по существу постоянным на этом уровне давления (при условии, что расход впрыска топлива постоянен). Давление подачи может меняться в зависимости от изменения расхода впрыска топлива, происходящего при управлении топливным насосом по разомкнутому контуру. Переход к управлению топливоподкачивающим насосом по разомкнутому контуру при выявлении погрешности в пределах диапазона датчика давления устраняет зависимость контроллера от неточных данных обратной связи от датчика давления. Это, в свою очередь, повышает робастность управления топливоподкачивающим насосом и снижает вероятность подачи несоответствующего количества топлива в цилиндры двигателя.
В примере на диаграмме 900 наличие погрешности в пределах диапазона датчика давления указывают, как только было установлено, что измеренное датчиком давление подачи оставалось постоянным в течение порогового периода. В других примерах, например на диаграмме 1000 на ФИГ. 10, контроллер может продолжить отслеживать измеренное датчиком давление подачи во время подачи нескольких импульсов напряжения, чтобы удостовериться, что измеренное сглаживание не является случайностью.
На ФИГ. 10 раскрыт другой пример диаграммы 1000, иллюстрирующей рассматриваемые сигналы для диагностики погрешности в пределах диапазона датчика давления, измеряющего давление подачи топливоподкачивающего насоса, например, в соответствии с алгоритмом 700 на ФИГ. 7. На диаграмме 1000 представлены: заданное командой давление подачи топливоподкачивающего насоса на графике 1002, напряжение, подаваемое топливоподкачивающему насосу, на графике 1004, измеренное датчиком давление подачи на графике 1006, указание выполнения условий для запуска на графике 1012 и указание наличия погрешности в пределах диапазона датчика давления на графике 1016. Кроме того, символически представлены уставка давления в виде штриховой линии 1008 и давление паров топлива в виде штриховой линии 1010. Для всех вышеуказанных графиков ось X представляет время, значения которого растут слева направо по оси X. Ось Y графиков 1002, 1004 и 1006 соответствует обозначенному параметру, значение которого растет снизу вверх.
С t0 до t1 контроллер осуществляет управление по замкнутому контуру импульсами напряжения, подаваемыми топливоподкачивающему насосу, как раскрыто выше на примере диаграммы 900. При этом, в отличие от управления по замкнутому контуру на диаграмме 900, осуществляемого в соответствии либо с первым, либо со вторым примером стратегии управления с обратной связью, управление по замкнутому контуру на диаграмме 1000 не соответствует второму примеру стратегии управления с обратной связью (так как не происходит «заклинивание» процесса управления при недостижении необходимого пикового давления из-за сглаживания). При этом в других примерах погрешность в пределах диапазона может быть выявлена, если происходит сглаживание на пике во время управления топливоподкачивающим насосом по замкнутому контуру в соответствии со вторым примером стратегии управления с обратной связью.
До t1 условия для запуска диагностики погрешности в пределах диапазона датчика давления не выполнены, и наличие погрешности в пределах диапазона датчика давления не указано. При этом, как видно из графика 1006, погрешность в пределах диапазона датчика давления возникает, о чем свидетельствует сглаживание пиков измеренного сигнала давления.
В момент t1, как видно из графика 912, контроллер указывает, что условия для запуска диагностики погрешности в пределах диапазона датчика давления выполнены, и запускает алгоритм для диагностики погрешности в пределах диапазона датчика давления, например, алгоритм 700 на ФИГ. 7. Как раскрыто выше на примере диаграммы 900, это может включать в себя: сначала определение порогового периода, в течение которого измеренное датчиком давление подачи должно оставаться постоянным при исправной работе датчика; пример порогового периода представлен на 1018. В изображенном примере пороговый период 1018 меньше длительности импульса 1005 импульсов напряжения, подаваемых топливоподкачивающему насосу.
С t1 до t2 контроллер выполняет диагностический алгоритм путем отслеживания измеренного датчиком давления подачи для определения того, остается ли оно постоянным (например, происходит ли его сглаживание) дольше порогового периода. Как указано выше, в момент запуска диагностического алгоритма погрешность в пределах диапазона датчика уже существует; при подаче первого импульса напряжения в процессе диагностического алгоритма происходит возрастание, а затем сглаживание измеренного датчиком давления подачи, которое остается постоянным дольше порогового периода 1018. В отличие от примера диагностического алгоритма на диаграмме 900, в котором контроллер указывает наличие погрешности в пределах диапазона сразу после выявления сглаживания в течение порогового периода, в примере диагностического алгоритма на диаграмме 1000 контроллер ожидает до тех пор, пока не будет выявлено несколько отдельных случаев сглаживания, перед тем, как указать наличие погрешности в пределах диапазона. А именно, в изображенном примере контроллер не указывает наличие погрешности в пределах диапазона до тех пор, пока измеренное датчиком давление подачи не останется постоянным в течение порогового периода в третий раз, что происходит в момент t2. Данный пример не является ограничивающим; в других примерах, прежде чем указать наличие погрешности в пределах диапазона, контроллер может выждать до тех пор, пока сглаживание не произойдет один, два, три, четыре, пять или более раз. Или же контроллер может выполнить другой алгоритм для выявления сглаживания измеренного сигнала давления без отступления от объема раскрываемого изобретения.
Как и на диаграмме 900, указав наличие погрешности в пределах диапазона, контроллер переходит от управления топливоподкачивающим насосом по замкнутому контуру к управлению топливоподкачивающим насосом по разомкнутому контуру. Например, как видно из графика 1004, после t2 топливоподкачивающему насосу подают неизменное ненулевое напряжение. Как показано, подачу неизменного напряжения не начинают до тех пор, пока не произойдет падение измеренного датчиком давления подачи не некоторую величину относительно сглаженного пикового давления; данная операция может быть нужна в связи с тем, что необходимое давление подачи может быть ниже пикового давления во время импульсной эксплуатации топливоподкачивающего насоса. При этом в других примерах неизменное напряжение может быть подано, как только будет указано наличие погрешности в пределах диапазона, или напряжение можно линейно повысить до неизменного напряжения, или можно применить другую стратегию для перехода от импульсной к непрерывной эксплуатации топливоподкачивающего насоса. В любом случае, при подаче неизменного ненулевого напряжения происходит линейное повышение измеренного датчиком давления подачи до давления выше среднего давления пилообразной кривой, а затем давление остается по существу постоянным на этом уровне (при условии, что расход впрыска топлива постоянен). Давление подачи может меняться в зависимости от изменения расхода впрыска топлива, происходящего при управлении топливным насосом по разомкнутому контуру.
Алгоритм 700 и диаграммы 900 и 1000 относятся к диагностике погрешности в пределах диапазона датчика давления и соответствующей регулировке управления топливоподкачивающим насосом с переходом от управления по замкнутому контуру к управление по разомкнутому контуру. Или же вместо перехода к управлению топливоподкачивающим насосом по разомкнутому контуру, когда имеет место погрешность в пределах диапазона датчика давления, может быть реализован третий пример стратегии управления с обратной связью, в настоящем описании именуемой «робастное управление».
На ФИГ. 11 раскрыт пример алгоритма 1100 для осуществления робастного управления топливоподкачивающим насосом в соответствии с третьим примером стратегии управления с обратной связью. Данная робастная стратегия управления обеспечивает преимущество, состоящее в возможности продолжения управления топливоподкачивающим насосом по замкнутому контуру с обратной связью даже в случае неисправности датчика давления или возрастания давления паров топлива, не распознанного контроллером, с одновременным сведением к минимуму вероятности того, что двигатель заглохнет, и чрезмерного потребления топлива. Алгоритм 1100 можно осуществлять вместе с алгоритмом 500 на ФИГ. 5А на шаге 508, например.
На шаге 1102 алгоритм предусматривает включение топливоподкачивающего насоса. Например, как раскрыто выше на примере алгоритма 530, это может включать в себя регулирование контроллером исполнительного механизма топливоподкачивающего насоса для подачи топливоподкачивающему насосу заранее заданного напряжения более высокого уровня, которое быстро повысит давление подачи до необходимого пикового давления (например, 8-12В), определенного в алгоритме 500.
После шага 1102 алгоритм следует на шаг 1104, и контроллер определяет, ниже ли измеренное датчиком давление подачи, чем необходимое пиковое давление подачи. Например, контроллер может получить сигнал от датчика давления, отражающий давление подачи, и сравнить данное измеренное датчиком давление подачи с сохраненным значением предыдущего определенного необходимого пикового давления подачи. Если ответ на шаге 1104 будет "ДА", что указывает на то, что либо давление подачи не достигло необходимого пикового давления, либо выходной сигнал датчика неточен, алгоритм следует на шаг 1106.
На шаге 1106 контроллер определяет, меньше ли период времени, в течение которого топливоподкачивающий насос пробыл включенным, чем калиброванное максимальное значение. Калиброванное максимальное значение может представлять собой заранее заданное значение, сохраненное в памяти, либо может быть определено в контроллере в зависимости от различных параметров работы двигателя (например, расхода топлива, частоты вращения двигателя, уровня напряжения, подаваемого топливоподкачивающему насосу, и т.п.) во время выполнения алгоритма 1100. Калиброванное максимальное значение представляет максимальный период, в течение которого топливоподкачивающий насос должен оставаться во включенном состоянии, в состояниях, когда из-за неисправности датчика давления или иной ошибки измеренное датчиком давление подачи не может достичь необходимого пикового давления. Если ответ на шаге 1106 будет "ДА", алгоритм совершает возврат на шаг 1104. В противном случае, если ответ на шаге 1106 будет "НЕТ", что указывает на то, что топливоподкачивающий насос пробыл включенным в течение по меньшей мере калиброванного максимального периода, алгоритм совершает возврат на шаг 1102 или опционально следует на шаг 1108.
На шаге 1108 контроллер калибрует выходной сигнал датчика давления для более точного отражения фактического давления подачи. Если топливоподкачивающий насос остается включенным в течение по меньшей мере калиброванного максимального периода, это может быть обусловлено сглаживанием сигнала от датчика, согласно которому фактическое давление подачи равно уставке давления клапана разгрузки давления. Такое сглаживание можно определить по способу на ФИГ. 7, например. В одном примере стратегии калибровки, определив, что топливоподкачивающий насос пробыл включенным в течение калиброванного максимального периода, контроллер переходит к определению того, оставалось ли измеренное датчиком давление подачи постоянным (например, сглаженным) дольше порогового периода. Если да, то далее контроллер устанавливает поправку на смещение давления как разность уставки давления клапана разгрузки давления и давления, при котором произошло сглаживание измеренного датчиком давления подачи, и калибрует выходной сигнал датчика давления путем прибавления поправки на смещение к измеренному давлению подачи. Таким образом, калиброванное давление подачи, сформированное в контроллере в определенный момент времени, может быть равно сумме поправки на смещение и текущего измеренного датчиком давления подачи. Затем калиброванное давление подачи можно использовать вместо измеренного датчиком давления подачи при осуществлении контроллером управления с обратной связью, что обеспечивает преимущество, состоящее в повышении точности управления топливоподкачивающим насосом, и, тем самым, экономии топлива. Данный пример стратегии калибровки проиллюстрирован на ФИГ. 12В, речь о которой пойдет ниже, и может подходить для случаев, когда датчик давления стабильно выдает заниженные показания. При этом калибровку измеренного датчиком давления подачи можно выполнять другими способами без отступления от объема раскрываемого изобретения.
После шага 1108 алгоритм следует на шаг 1110. Кроме того, если ответ на шаге 1104 будет "НЕТ", что указывает на то, что давление подачи достигло необходимого пикового давления подачи, алгоритм следует на шаг 1110. На шаге 1110 алгоритм предусматривает выключение топливоподкачивающего насоса. Например, как раскрыто выше на примере алгоритм 530, это может включать в себя регулирование контроллером исполнительного механизма топливоподкачивающего насоса для подачи топливоподкачивающему насосу заранее заданного напряжения более низкого уровня, достаточно низкого для поддержания питания топливоподкачивающего насоса (например, выше 0 В, но ниже 0,3 В), но при котором не произойдет существенного повышения давления топлива. При этом в других примерах выключение топливоподкачивающего насоса может включать в себя регулирование контроллером исполнительного механизма топливоподкачивающего насоса для подачи 0 В топливоподкачивающему насосу. Заранее заданное напряжение более низкого уровня может быть определено путем выполнения алгоритма 500, например. Выключение топливоподкачивающего насоса, когда период его включенного состояния достигнет калиброванного максимального периода, независимо от того, достигло ли измеренное датчиком давление подачи пикового давления подачи, позволяет продолжить импульсную эксплуатацию топливоподкачивающего насоса, даже если датчик давления неисправен. Например, если датчик неисправен и выдает заниженные показания, измеренное датчиком давление подачи может оставаться сглаженным на уровне ниже необходимого пикового давления при осуществлении нормального управления топливоподкачивающим насосом по замкнутому контуру (например, алгоритма на ФИГ. 5С), так как данная стратегия управления не предусматривает выключение топливоподкачивающего насоса до тех пор, пока не будет достигнуто необходимое пиковое давление. В отличие от нее, робастная стратегия управления алгоритма 1100 "перезапускает" управление топливоподкачивающим насосом при достижении калиброванного максимального периода включенного состояния, независимо от того, достигло ли давление подачи необходимого пикового давления подачи.
После шага 1110 алгоритм следует на шаг 1112, и контроллер устанавливает целевое падение давления ΔР с пикового давления до давления впадины, а также жесткость системы S. Целевое падение давления ДР представляет собой необходимую величину падения давления подачи в период времени с выключения топливоподкачивающего насоса до того, как топливоподкачивающий насос будет вновь включен, и может быть равно разности необходимого пикового давления и необходимого давления впадины, например. Жесткость системы S может представлять собой модуль объемной упругости текучей среды в топливной системе (например, топлива или топлива и воздуха). Модуль объемной упругости может зависеть от плотности текучей среды в топливной системе и может быть выражен уравнением =

После шага 1112 алгоритм следует на шаг 1114, и контроллер устанавливает объем V топлива, всосанного двигателем, когда топливоподкачивающий насос выключен, являющийся основанием для перехода топливоподкачивающего насоса из выключенного состояния во включенное. Объем V может быть определен в контроллере в зависимости от ΔР и S, например с помощью уравнения =

После шага 1114 алгоритм следует на шаг 1116, и контроллер определяет, выше ли измеренное датчиком давление подачи, чем необходимое давление подачи впадины. Если ответ на шаге 1116 будет "НЕТ", что указывает на то, что измеренное датчиком давление подачи достигло необходимого давления впадины, алгоритм совершает возврат на шаг 1102 для включения топливоподкачивающего насоса, и топливоподкачивающему насосу подают другой импульс напряжения. При этом следует понимать, что алгоритм 1100 может быть прерван в любой момент (например, путем системного прерывания) для завершения робастного управления топливоподкачивающим насосом с обратной связью.
В противном случае, если ответ на шаге 1116 будет "ДА", алгоритм следует на шаг 1118, и контроллер определяет, превышает ли объем топлива, всосанного двигателем после выключения топливоподкачивающего насоса, объем V, определенный на шаге 1114. Объем топлива, всосанного двигателем после выключения топливоподкачивающего насоса, может быть равен количеству топлива, впрыснутого в двигатель топливной системой в период времени, начинающийся с выключения топливоподкачивающего насоса и заканчивающийся выполнением шага 1118, и может быть определен в контроллере в зависимости от измеренных значений и/или данных, хранящихся в памяти, относящихся к управлению топливными форсунками в рассматриваемый период времени.
Если ответ на шаге 1118 будет "НЕТ", алгоритм совершает возврат на шаг 1116. В противном случае, если ответ на шаге 1118 будет "ДА", алгоритм совершает возврат на шаг 1102, или опционально следует на шаг 1120 перед тем, как вернуться на шаг 1102.
На шаге 1120 контроллер калибрует выходной сигнал датчика давления, измеряющего давление подачи, для более точного отражения фактического давления подачи. Если объем топлива, всосанного двигателем после выключения топливоподкачивающего насоса, превышает объем V, это может быть обусловлено сглаживанием сигнала от датчика, указывающего, что фактическое давление подачи равно давлению паров топлива. Такое сглаживание может быть определено по способу на ФИГ. 7, например. В одном примере стратегии калибровки, определив, что объем топлива, всосанного двигателем после выключения топливоподкачивающего насоса, превышает объем V, контроллер далее определяет, оставалось ли измеренное датчиком давление подачи постоянным (например, сглаженным) дольше порогового периода. Если да, то далее контроллер устанавливает поправку на смещение давления как разность давления, при котором произошло сглаживание измеренного датчиком давления подачи, и давления паров топлива, и калибрует выходной сигнал датчика давления путем вычитания поправки на смещение из измеренного датчиком давления подачи. Таким образом, калиброванное давление подачи, сформированное в контроллере в определенный момент времени, может быть равно текущему измеренному давлению подачи за вычетом поправки на смещение. Далее калиброванное давление подачи можно использовать вместо измеренного датчиком давления подачи при осуществлении контроллером управления с обратной связью, что обеспечивает преимущество, состоящее в улучшении работы двигателя за счет снижения вероятности того, что двигатель заглохнет, из-за низкого давления в топливной рампе. Данный пример стратегии калибровки проиллюстрирован на ФИГ. 12D, речь о которой пойдет ниже, и подходит в случае, когда датчик давления стабильно выдает завышенные показания.
После шага 1120 алгоритм совершает возврат на шаг 1102, или его выполнение опционально завершают, если контроллер прекратит робастное управление топливоподкачивающим насосом с обратной связью, например, из-за глушения двигателя. Возврат на шаг 1102 и включение топливоподкачивающего насоса, когда объем топлива, израсходованного двигателем, достигнет заданного уровня, независимо от того, упало ли измеренное датчиком давление подачи до необходимого давления подачи впадины, позволяют продолжить импульсную эксплуатацию топливоподкачивающего насоса, даже если датчик давления неисправен. Например, если датчик неисправен и выдает завышенные показания, измеренное датчиком давление подачи может оставаться сглаженным на уровне выше необходимого давления впадины при осуществлении нормального управления топливоподкачивающим насосом по замкнутому контуру (например, алгоритма на ФИГ. 5С), так как данная стратегия управления не предусматривает включение топливоподкачивающего насоса, пока не будет достигнуто необходимое давление впадины. В отличие от нее, робастная стратегия управления алгоритма 1100 "перезапускает" управление топливоподкачивающим насосом, когда определенное количество топлива будет всосано двигателем, независимо от того, достигло ли давление подачи необходимого давления подачи впадины. Такое управление обеспечивает преимущество, состоящее в возможности снижения вероятности того, что двигатель заглохнет, из-за недостаточного давления подачи топлива.
Следует понимать, что если калибровку измеренного датчиком давления подачи запускают при выполнении алгоритма 1100 во время того или иного периода работы, калиброванное давление подачи можно использовать вместо измеренного датчиком давления подачи в последующих циклах выполнения алгоритма 1100 в течение этого периода работы. В зависимости от точности калиброванного давления подачи, дальнейшая калибровка при последующем выполнении алгоритма 1100 может не быть нужна. Или же, если неисправность датчика давления усиливается, может быть выполнена дополнительная калибровка.
На ФИГ. 12A-12D представлены примеры диаграмм, иллюстрирующих рассматриваемые сигналы во время управления топливоподкачивающим насосом в соответствии с третьим примером стратегии управления с обратной связью, например, в соответствии с алгоритмом 1100 на ФИГ. 11. Для простоты, на изображенных диаграммах двигатель работает в установившемся режиме, всасывание топлива двигателем происходит с постоянной скоростью, а величина каждого импульса напряжения, подаваемого топливоподкачивающему насосу, является одной и той же.
Рассмотрим сначала ФИГ. 12А, изображающую пример диаграммы 1200, на которой представлены: напряжение, подаваемое топливоподкачивающему насосу, на графике 1202, фактическое давление подачи топливоподкачивающего насоса на графике 1204 и измеренное датчиком давление подачи топливоподкачивающего насоса на графике 1206. Для всех вышеуказанных графиков ось X представляет время, значения которого растут слева направо по оси X. Ось Y каждого отдельного графика соответствует обозначенному параметру, значение которого растет снизу вверх. Кроме того, линия 1208 представляет (фактическую) уставку давления клапана разгрузки давления, линия 1210 представляет необходимое пиковое давления подачи, линия 1212 представляет необходимое давление подачи впадины, а линия 1214 представляет (фактическое) давление паров топлива.
Вскоре после t0 измеренное датчиком давление подачи достигает необходимого давления 1212 подачи впадины; в связи с этим, контроллер включает топливоподкачивающий насос (например, путем направления сигнала исполнительному механизму топливоподкачивающего насоса). При этом датчик давления, измеряющий давление подачи, выдает заниженные показания; измеренное датчиком давление подачи ниже фактического давления подачи на первую величину. Соответственно, топливоподкачивающий насос включают, когда фактическое давление подачи превышает необходимое давление подачи впадины. В данном случае, первая величина меньше разности уставки давления клапана разгрузки давления и необходимого пикового давления. Поэтому, когда измеренное датчиком давление подачи достигает необходимого пикового давления, фактическое давление подачи еще не достигло уставки давления клапана разгрузки давления. Выявив, что измеренное датчиком давление подачи достигло необходимого пикового давления, контроллер выключает топливоподкачивающий насос. До выключения, топливоподкачивающий насос пробыл включенным в течение периода 1216 включенного состояния, который меньше калиброванного максимального периода 1218 включенного состояния топливоподкачивающего насоса. После выключения топливоподкачивающего насоса, фактическое давление подачи падает со скоростью, соответствующей скорости всасывания двигателем топлива из топливной системы.
В момент t1 неисправность датчика давления усиливается, и его показания становятся еще более заниженными, так что измеренное датчиком давление подачи становится ниже фактического давления подачи на вторую величину, при этом вторая величина больше первой. Вторая величина больше разности уставки давления клапана разгрузки давления и необходимого пикового давления. Измеренное датчиком давление подачи падает до необходимого давления впадины в момент t2, до того, как фактическое давление подачи упадет до необходимого давления впадины (так как датчик давления выдает заниженные показания). В данном случае контроллер вновь включает топливоподкачивающий насос в момент t2, выявив, что измеренное датчиком давление подачи достигло необходимого давления впадины.
В момент t3 фактическое давление подачи достигает уставки давления клапана разгрузки давления, в связи с чем происходит открытие клапана разгрузки давления и стравливание чрезмерного давления топлива. При этом, поскольку разность фактического и измеренного датчиком давления подачи превышает разность уставки давления клапана разгрузки давления и необходимого пикового давления подачи, то измеренное датчиком давление подачи еще не достигло необходимого пикового давления в момент t2. Соответственно, топливоподкачивающий насос остается включенным, фактическое давление подачи остается постоянным (сглаживается) на уровне уставки давления клапана разгрузки давления, а измеренное датчиком давление подачи остается постоянным (сглаживается) на уровне давления ниже необходимого пикового давления.
В момент t4 контроллер выявляет, что топливоподкачивающий насос пробыл включенным в течение калиброванного максимального периода 1218 включенного состояния, и в связи с этим выключает топливоподкачивающий насос, как раскрыто выше на примере алгоритма 1100. Соответственно, несмотря на то, что измеренное датчиком давление подачи не достигло необходимого пикового давления, срок, в течение которого топливоподкачивающий насос пробыл включенным без достижения необходимого пикового давления, указывает на то, что выходной сигнал датчика может быть неточен, и контроллер выключает топливоподкачивающий насос, чтобы можно было продолжить импульсную эксплуатацию. Это не соответствует второму примеру стратегии управления с обратной связью, раскрытому в настоящем описании, в котором топливоподкачивающий насос выключают только при достижении измеренным датчиком давлением подачи необходимого пикового давления, в результате чего топливоподкачивающий насос может остаться включенным, несмотря на то, что фактическое давление подачи превысило необходимое пиковое давление и достигло уставки давления клапана разгрузки давления.
После t4 контроллер продолжает включать топливоподкачивающий насос, когда измеренное датчиком давление подачи падает до необходимого давления впадины, и выключать топливоподкачивающий насос при достижении калиброванного максимального периода включенного состояния. Как показано, так как величина занижения показаний, выдаваемых датчиком, остается постоянной после t4, топливоподкачивающий насос остается включенным в течение калиброванного максимального периода 1218 включенного состояния при каждой подаче импульса напряжения. Таким образом, несмотря на то, что датчик неисправен и выдает заниженные показания, робастная стратегия управления с обратной связью обеспечивает возможность осуществления импульсной эксплуатации топливоподкачивающего насоса и, тем самым, повышения экономии топлива.
На ФИГ. 12В раскрыт пример диаграммы 1240, иллюстрирующей те же сигналы, что и диаграмма 1200, и соответствующей эксплуатации топливоподкачивающего насоса в соответствии с третьим примером стратегии управления с обратной связью. При этом на диаграмме 1240 контроллер запускает калибровку выходного сигнала датчика давления, выявив, что топливоподкачивающий насос пробыл включенным в течение калиброванного максимального периода включенного состояния в момент t3. График 1242 представляет калиброванный выходной сигнал датчика давления.
В изображенном примере контроллер определяет калиброванный выходной сигнал датчика давления путем прибавления к измеренному давлению подачи поправки 1244 на смещение, равной разности уставки давления клапана разгрузки давления и давления, при котором произошло сглаживание измеренного датчиком давления подачи между t2 и t3. С момента t3 и далее управление с обратной связью осуществляют в зависимости от калиброванного выходного сигнала 1242 датчика давления, а не от измеренного датчиком давления 1206 подачи. Соответственно, когда измеренное датчиком давление подачи достигает необходимого давления впадины в момент t4, контроллер не включает топливоподкачивающий насос; вместо этого, топливоподкачивающий насос остается выключенным до тех пор, пока калиброванный выходной сигнал датчика давления не достигнет необходимого давления впадины в момент t5. Аналогичным образом, как только калиброванный выходной сигнал датчика давления достигнет необходимого пикового давления в момент t6, топливоподкачивающий насос выключают, несмотря на то, что измеренное датчиком давление подачи еще не достигло необходимого пикового давления. Как показано, калиброванный выходной сигнал 1242 датчика давления близко совпадает с фактическим давлением 1204 подачи с момента t3 и далее, благодаря чему топливоподкачивающим насосом можно точно и эффективно управлять, несмотря на ошибочный выходной сигнал датчика давления.
На ФИГ. 12С раскрыт пример диаграммы 1260, иллюстрирующей те же сигналы, что и диаграмма 1200, и соответствующей эксплуатации топливоподкачивающего насоса в соответствии с третьим примером стратегии управления с обратной связью. При этом, в отличие от диаграмм 1200 и 1240, иллюстрирующих эксплуатацию топливоподкачивающего насоса при наличии неисправности датчика, в связи с чем датчик выдает заниженные показания, диаграмма 1260 иллюстрирует эксплуатацию топливоподкачивающего насоса при наличии неисправности датчика, в связи с которой датчик выдает завышенные показания. Диаграмма 1260 также иллюстрирует объем топлива, всосанного двигателем, на графике 1262, и примеры значений фактического давления подачи и измеренного датчиком давления подачи. А именно, в изображенном неограничивающем примере необходимое давление подачи впадины составляет 400 кПа, а необходимое пиковое давление подачи - 600 кПа.
Вскоре после t0 измеренное датчиком давление подачи падает до необходимого давления впадины, поэтому контроллер включает топливоподкачивающий насос. В это время, так как датчик выдает завышенные показания, фактическое давление подачи меньше необходимого давления впадины на первую величину. В данном случае первая величина меньше разности необходимого давления впадины и давления паров топлива. Поэтому, когда измеренное датчиком давление подачи достигает необходимого давления впадины, фактическое давление подачи еще не достигло давления паров топлива, и сглаживание сигналов не произошло. После включения топливоподкачивающего насоса, фактическое давление подачи падает со скоростью, соответствующей величине напряжения, подаваемого топливоподкачивающему насосу.
В момент t1 измеренное датчиком давление подачи достигает необходимого пикового давления, в связи с чем контроллер выключает топливоподкачивающий насос. Так как датчик давления выдает завышенные показания, фактическое давление подачи еще не достигло необходимого пикового давления. Соответственно, давление подачи ниже запрошенного давления подачи для текущей работы двигателя.
В момент t2 неисправность датчика давления усиливается, и он начинает выдавать еще более завышенные показания, в связи с чем измеренное датчиком давление подачи превышает фактическое давление подачи на вторую величину, при этом вторая величина больше первой. Вторая величина больше разности необходимого давления впадины и давления паров топлива. Фактическое давление подачи падает до необходимого давления впадины чуть раньше t2, а затем достигает давления паров топлива в момент t2, в связи с чем происходит сглаживание сигнала. Так как датчик давления выдает завышенные показания, и вторая величина больше разности необходимого давления впадины и давления паров топлива, происходит сглаживание измеренного датчиком давления подачи на уровне давления выше необходимого давления впадины. Так как измеренное датчиком давление подачи не достигло необходимого давления впадины, контроллер не включает топливоподкачивающий насос, и фактическое давление подачи остается на уровне давления паров топлива. Если бы это продолжалось слишком долго, двигатель мог бы заглохнуть.
Чтобы двигатель не заглох, как раскрыто выше на примере алгоритма 1100, контроллер отслеживает объем топлива, всосанного двигателем, и сравнивает его с объемом V топлива, всосанного двигателем, пока топливоподкачивающий насос выключен, являющимся основанием для перевода топливоподкачивающего насоса из выключенного во включенное состояние. Как указано выше, объем V может быть равен частному от деления целевого падения давления ΔР с необходимого пикового давления до необходимого давления впадины на жесткость системы S. В изображенном примере целевое падение давления ДР составляет 200 кПа, а жесткость системы S составляет 100 кПа/см3, поэтому объем V составляет 2 см3. Для примера, график 1262 указывает, что 2 см3 топлива было всосано в момент t1, 4 см3 топлива было всосано в момент t4 и т.д.; эти значения являются не более, чем иллюстративными, и не отражают фактические совокупные количества топлива, которое было бы всосано в ходе работы двигателя. В других примерах контроллер может сбрасывать значение объема V всосанного топлива до 0 при каждом выключении топливоподкачивающего насоса.
В момент t1, когда произошло выключение топливоподкачивающего насоса, объем всосанного топлива составлял 2 см3. В момент t4 объем всосанного топлива достиг 4 см3, то есть 2 см3 топлива было всосано после выключения топливоподкачивающего насоса. Так как объем V, являющийся основанием для перевода топливоподкачивающего насоса в другое состояние, задан в размере 2 см3, контроллер включает топливоподкачивающий насос в момент t4. Соответственно, несмотря на то, что измеренное датчиком давление подачи не достигло необходимого давления впадины, топливоподкачивающий насос включают, как только происходит всасывание объема V, что позволяет продолжить импульсную эксплуатацию. Это не соответствует второму примеру стратегии управления с обратной связью, раскрытому в настоящем описании, в котором топливоподкачивающий насос вновь включают только тогда, когда измеренное датчиком давление подачи достигнет необходимого давления впадины, в результате чего топливоподкачивающий насос может оставаться выключенным, несмотря на то, что фактическое давление подачи достигло давления паров топлива.
После t4 контроллер продолжает выключать топливоподкачивающий насос, когда измеренное датчиком давление подачи достигает необходимого пикового давления, и включать топливоподкачивающий насос, когда объем топлива, всосанного двигателем после выключения топливоподкачивающего насоса, достигает 2 см3. Таким образом, несмотря на то, что датчик неисправен и выдает завышенные показания, робастная стратегия управления с обратной связью обеспечивает возможность импульсной эксплуатации топливоподкачивающего насоса и, тем самым, повышения экономии топлива.
На ФИГ. 12D раскрыт пример диаграммы 1280, иллюстрирующей те же сигналы, что и диаграмма 1260, и соответствующей эксплуатации топливоподкачивающего насоса в соответствии с третьим примером стратегии управления с обратной связью. При этом на диаграмме 1280 контроллер запускает калибровку выходного сигнала датчика давления, выявив, что с момента выключения топливоподкачивающего насоса был всосан объем V топлива. График 1282 представляет калиброванный выходной сигнал датчика давления.
В изображенном примере контроллер определяет калиброванный выходной сигнал датчика давления путем вычитания из измеренного датчиком давления подачи поправки 1284 на смещение, равной разности давления, при котором произошло сглаживание измеренного датчиком давления подачи между t3 и t4, и давления паров топлива. С момента t4 и далее, управление с обратной связью осуществляют в зависимости от калиброванного выходного сигнала датчика давления 1282, а не от измеренного датчиком давления подачи 1206. Соответственно, когда измеренное датчиком давление подачи достигает необходимого пикового давления в момент t5, контроллер не включает топливоподкачивающий насос; вместо этого, топливоподкачивающий насос остается выключенным до тех пор, пока калиброванный выходной сигнал датчика давления не достигнет необходимого пикового давления в момент t6. Аналогичным образом, как только калиброванный выходной сигнал датчика давления достигнет необходимого давления впадины в момент t7, топливоподкачивающий насос выключают, несмотря на то, что измеренное датчиком давление подачи еще не достигло необходимого давления впадины. Как показано, калиброванный выходной сигнал 1282 датчика давления близко совпадает с фактическим давлением 1204 подачи с момента t4 и далее, благодаря чему топливоподкачивающим насосом можно точно и эффективно управлять, несмотря на ошибочный выходной сигнал датчика давления.
В соответствии с вышеприведенным описанием, способ для двигателя содержит шаги, на которых: во время эксплуатации топливоподкачивающего насоса в импульсном режиме регулируют уровень напряжения, подаваемого топливоподкачивающему насосу, в зависимости от выходного сигнала датчика давления ниже по потоку от топливоподкачивающего насоса и отслеживают выходной сигнал на предмет сглаживания; в ответ на выявление сглаживания указывают наличие погрешности датчика давления и эксплуатируют топливоподкачивающий насос без учета выходного сигнала датчика давления. В первом примере способа отслеживание выходного сигнала на предмет сглаживания включает в себя сравнение периода времени, в течение которого наклон выходного сигнала равен нулю, с пороговым периодом времени. Во втором примере способа, опционально включающем в себя первый пример, эксплуатация топливоподкачивающего насоса без учета выходного сигнала датчика давления включает в себя эксплуатацию топливоподкачивающего насоса в непрерывном режиме, в котором топливоподкачивающему насосу подают неизменное ненулевое напряжение. В третьем примере способа, опционально включающем в себя первый и/или второй примеры, эксплуатация топливоподкачивающего насоса без учета выходного сигнала датчика давления включает в себя эксплуатацию топливоподкачивающего насоса в импульсном режиме, в котором уровень напряжения, подаваемого топливоподкачивающему насосу, не регулируют в зависимости от выходного сигнала датчика давления. В четвертом примере способа, опционально включающем в себя один или несколько примеров с первого по третий, регулирование уровня напряжения, подаваемого топливоподкачивающему насосу, в зависимости от выходного сигнала датчика давления включает в себя регулирование коэффициента заполнения импульсов напряжения в зависимости от выходного сигнала. В пятом примере способа, опционально включающем в себя один или несколько примеров с первого по четвертый, регулирование коэффициента заполнения импульсов напряжения в зависимости от выходного сигнала включает в себя увеличение коэффициента заполнения, когда пиковое давление согласно выходному сигналу ниже необходимого пикового давления, и уменьшение коэффициента заполнения, когда пиковое давление выше необходимого пикового давления. В шестом примере способа, опционально включающем в себя один или несколько примеров с первого по пятый, регулирование уровня напряжения, подаваемого топливоподкачивающему насосу, в зависимости от выходного сигнала датчика давления включает в себя подачу первого, более высокого, напряжения топливоподкачивающему насосу, когда выходной сигнал датчика давления уменьшается до необходимого давления впадины, и подачу второго, более низкого, напряжения топливоподкачивающему насосу, когда выходной сигнал датчика давления увеличивается до необходимого пикового давления. В седьмом примере способа, опционально включает в себя один или несколько примеров с первого по шестой, погрешность датчика давления представляет собой погрешность в пределах диапазона, при этом в способе дополнительно: в ответ на увеличение или уменьшение выходного сигнала за пределы ожидаемого рабочего диапазона датчика давления указывают наличие погрешности за пределами диапазона датчика давления и эксплуатируют топливоподкачивающий насос без учета выходного сигнала датчика давления.
В соответствии с вышеприведенным описанием, дополнительный способ для эксплуатации топливной системы двигателя содержит шаги, на которых: во время работы двигателя в установившемся режиме с запрошенным давлением подачи топливоподкачивающего насоса ниже первого порога уменьшают коэффициент заполнения импульсов напряжения, подаваемых топливоподкачивающему насосу, до тех пор, пока не будет выявлено сглаживание выходного сигнала датчика давления ниже по потоку от топливоподкачивающего насоса, и сохраняют давление, при котором происходит сглаживание выходного сигнала, в качестве давления паров топлива топливной системы; во время работы двигателя в установившемся режиме с запрошенным давлением подачи топливоподкачивающего насоса выше второго порога увеличивают коэффициент заполнения импульсов напряжения, подаваемых топливоподкачивающему насосу, до тех пор, пока не будет выявлено сглаживание выходного сигнала датчика давления, сохраняют давление, при котором произошло сглаживание выходного сигнала, в качестве уставки давления клапана разгрузки давления; и регулируют работу топливоподкачивающего насоса в зависимости от сохраненных в памяти уставки давления и давления паров топлива.
В первом примере дополнительного способа, регулирование работы топливоподкачивающего насоса в зависимости от сохраненных в памяти уставки давления и давления паров топлива включает в себя регулирование необходимого пикового давления подачи топливоподкачивающего насоса до уровня ниже сохраненной уставки давления на первую заранее заданную величину и регулирование необходимого давления впадины подачи топливоподкачивающего насоса до уровня выше сохраненного давления паров топлива на вторую заранее заданную величину. Во втором примере дополнительного способа, опционально включающем в себя первый пример, регулирование работы топливоподкачивающего насоса в зависимости от сохраненных уставки давления и давления паров топлива также включает в себя: во время эксплуатации топливоподкачивающего насоса в импульсном режиме подачу первого, более высокого, напряжения топливоподкачивающему насосу каждый раз, когда выходной сигнал датчика давления уменьшается до необходимого давления впадины, и подачу второго, более низкого, напряжения топливоподкачивающему насосу каждый раз, когда выходной сигнал датчика давления увеличивается до необходимого пикового давления. В третьем примере дополнительного способа, опционально включающем в себя первый и/или второй примеры, регулирование работы топливоподкачивающего насоса в зависимости от сохраненных уставки давления и давления паров топлива включает в себя определение коэффициента заполнения импульсов напряжения, при подаче которых топливоподкачивающему насосу выходной сигнал будет иметь максимальное значение при необходимом пиковом давлении подачи и минимальное значение при необходимом давлении подачи впадины, и подачу топливоподкачивающему насосу импульсов напряжения с определенным коэффициентом заполнения. В четвертом примере дополнительного способа, опционально включающем в себя один или несколько примеров с первого по третий, запрошенное давление подачи топливоподкачивающего насоса прямо пропорционально нагрузке двигателя. В пятом примере дополнительного способа, опционально включающем в себя один или несколько примеров с первого по четвертый, дополнительно: во время подачи топливоподкачивающему насосу импульсов напряжения с указанным определенным коэффициентом заполнения, отслеживают выходной сигнал датчика давления на предмет сглаживания, и в ответ на выявление сглаживания указывают наличие погрешности датчика давления и эксплуатируют топливоподкачивающий насос без учета выходного сигнала датчика давления. В шестом примере дополнительного способа, опционально включающем в себя один или несколько примеров с первого по пятый, эксплуатация топливоподкачивающего насоса без учета выходного сигнала датчика давления включает в себя эксплуатацию топливоподкачивающего насоса в непрерывном режиме, в котором топливоподкачивающему насосу подают неизменное ненулевое напряжение, или эксплуатацию топливоподкачивающего насоса в импульсном режиме, в котором импульсы напряжения, подаваемые топливоподкачивающему насосу, не регулируют в зависимости от выходного сигнала датчика давления.
Кроме того, в соответствии с вышеприведенным описанием, гибридное транспортное средство содержит: силовой агрегат, содержащий двигатель, мотор-генератор, аккумуляторную батарею и трансмиссию, соединенную с колесами транспортного средства; топливную систему, содержащую топливный бак, топливоподкачивающий насос, датчик давления, установленный ниже по потоку от выхода топливоподкачивающего насоса в топливной системе, и клапан разгрузки давления; контроллер, содержащий долговременную память с хранящимися в ней инструкциями с возможностью исполнения их процессорным устройством для: в ответ на запрос динамического определения давления паров топлива топливной системы во время импульсной эксплуатации топливоподкачивающего насоса, когда запрошенный крутящий момент на колесах транспортного средства выше первого порога, механического соединения коленчатого вала двигателя с мотором-генератором, уменьшения нагрузки двигателя до тех пор, пока выходной сигнал датчика давления не останется постоянным в течение по меньшей мере первого порогового периода времени, с одновременным преобразованием электроэнергии в крутящий момент посредством мотора-генератора и подачей крутящего момента на колеса транспортного средства, и сохранения давления, при котором выходной сигнал остается постоянным, в качестве давления паров топлива. В первом примере гибридного транспортного средства контроллер дополнительно содержит инструкции в долговременной памяти с возможностью их исполнения процессорным устройством для: в ответ на запрос динамического определения уставки давления клапана разгрузки давления во время импульсной эксплуатации топливоподкачивающего насоса, когда запрошенный крутящий момент на выходном валу двигателя ниже второго порога, механического соединения коленчатого вала с мотором-генератором, увеличения нагрузки двигателя до тех пор, пока выходной сигнал датчика давления не останется постоянным в течение по меньшей мере второго порогового периода, с одновременным преобразованием части крутящего момента на выходном валу двигателя в электроэнергию посредством мотора-генератора и накоплением электроэнергии в аккумуляторной батарее, и сохранения давления, при котором выходной сигнал остается постоянным, в качестве уставки давления. Во втором примере гибридного транспортного средства, опционально включающем в себя первый пример, контроллер дополнительно содержит инструкции в долговременной памяти с возможностью их исполнения процессорным устройством для: отслеживания выходного сигнала при осуществлении управления топливоподкачивающим насосом по замкнутому контуру в зависимости от выходного сигнала датчика давления; в ответ на то, что выходной сигнал остается постоянным в течение по меньшей мере некоторого порогового периода, указания наличия погрешности в пределах диапазона датчика давления и переключения из управления топливоподкачивающим насосом по замкнутому контуру в управление им по разомкнутому контуру, при котором работу топливоподкачивающего насоса регулируют без учета выходного сигнала датчика давления. В третьем примере гибридного транспортного средства, опционально включающем в себя первый и/или второй примеры, инструкции в долговременной памяти с возможностью их исполнения процессорным устройством для переключения из управления топливоподкачивающим насосом по замкнутому контуру в управление им по разомкнутому контуру, при котором работу топливоподкачивающего насоса регулируют без учета выходного сигнала датчика давления, включают в себя инструкции для подачи неизменного ненулевого напряжения топливоподкачивающему насосу. В четвертом примере гибридного транспортного средства, опционально включающем в себя один или несколько примеров с первого по третий, контроллер дополнительно содержит инструкции в долговременной памяти с возможностью их исполнения процессорным устройством для: после сохранения давления, при котором выходной сигнал остается постоянным в качестве давления паров топлива, регулирования коэффициента заполнения импульсов напряжения, подаваемых топливоподкачивающему насосу, в зависимости от необходимого запаса по давлению между давлением паров топлива и давлением подачи топливоподкачивающего насоса.
Кроме того, в соответствии с вышеприведенным описанием, способ эксплуатации топливной системы двигателя содержит шаги, на которых: во время импульсной эксплуатации топливоподкачивающего насоса выключают топливоподкачивающий насос, когда измеренное датчиком давление подачи возрастет до необходимого пикового давления, или когда период включенного состояния топливоподкачивающего насоса достигнет калиброванного максимума, и включают топливоподкачивающий насос, когда либо измеренное датчиком давление подачи упадет до необходимого давления впадины, либо объем топлива, всосанного двигателем, достигнет заранее заданного объема. В первом примере данного способа устанавливают заранее заданный объем в зависимости от разности необходимого пикового давления и необходимого давления впадины и жесткости топливной системы. Во втором примере данного способа, опционально включающем в себя первый пример, заранее заданный объем задают равным частному от деления разности необходимого пикового давления и необходимого давления впадины на жесткость топливной системы. В третьем примере данного способа, опционально включающем в себя первый и/или второй примеры, дополнительно определяют жесткость топливной системы в зависимости от плотности текучей среды в топливной системе. В четвертом пример данного способа, опционально включающем в себя один или несколько примеров с первого по третий, дополнительно, если период включенного состояния топливоподкачивающего насоса достигнет калиброванного максимума, указывают наличие погрешности в пределах диапазона датчика давления и запускают калибровку измеренного датчиком давления подачи, при этом калибровка включает в себя прибавление поправки на смещение к измеренному давлению подачи. В пятом примере данного способа, опционально включающем в себя один или несколько примеров с первого по четвертый, поправка на смещение равна разности уставки давления клапана разгрузки давления и измеренного датчиком давления подачи при достижении периодом включенного состояния калиброванного максимума. В шестом примере данного способа, опционально включающем в себя один или несколько примеров с первого по пятый, дополнительно, если объем топлива, всосанного двигателем, достигнет заранее заданного объема, указывают наличие погрешности в пределах диапазона датчика давления и запускают калибровку измеренного датчиком давления подачи, при этом калибровка включает в себя вычитание поправки на смещение из измеренного датчиком давления подачи. В седьмом примере данного способа, опционально включающем в себя один или несколько примеров с первого по шестой, поправка на смещение равна разности измеренного датчиком давления подачи в момент, когда объем топлива, всосанного двигателем, достиг заранее заданного объема, и давления паров топлива топливной системы.
Еще один способ согласно настоящему раскрытию содержит шаги, на которых: при осуществлении управления топливоподкачивающим насосом по замкнутому контуру в зависимости от выходного сигнала датчика давления, расположенного ниже по потоку от топливоподкачивающего насоса, отслеживают выходной сигнал; если выходной сигнал остается постоянным в течение по меньшей мере первого порогового периода, когда топливоподкачивающий насос включен, выключают топливоподкачивающий насос, калибруют выходной сигнал в зависимости от давления, при котором выходной сигнал оставался постоянным, и осуществляют последующее управление топливоподкачивающим насосом по замкнутому контуру в зависимости от калиброванного выходного сигнала; если выходной сигнал остается постоянным в течение по меньшей мере второго порогового периода, когда топливоподкачивающий насос выключен, включают топливоподкачивающий насос, калибруют выходной сигнал в зависимости от давления, при котором выходной сигнал оставался постоянным, и осуществляют последующее управление топливоподкачивающим насосом по замкнутому контуру в зависимости от калиброванного выходного сигнала. В первом примере данного способа калибровка выходного сигнала в зависимости от давления, при котором выходной сигнал оставался постоянным, когда топливоподкачивающий насос был включенным, включает в себя прибавление первой поправки на смещение к выходному сигналу, при этом первая поправка на смещение равна разности уставки давления клапана разгрузки давления и давления, при котором выходной сигнал оставался постоянным, когда топливоподкачивающий насос был включенным. Во втором примере данного способа, опционально включающем в себя первый пример, калибровка выходного сигнала в зависимости от давления, при котором выходной сигнал оставался постоянным, когда топливоподкачивающий насос был выключенным, включает в себя вычитание второй поправки на смещение из выходного сигнала, при этом вторая поправка на смещение равна разности давления, при котором выходной сигнал оставался постоянным, когда топливоподкачивающий насос был выключенным, и давления паров топлива топливной системы. В третьем примере данного способа, опционально включающем в себя первый и/или второй примеры, дополнительно определяют первый пороговый период путем вычитания периода включенного состояния топливоподкачивающего насоса до того, как выходной сигнал достиг давления, при котором он оставался постоянным, из калиброванного максимального периода включенного состояния. В четвертом примере данного способа, опционально включающем в себя один или несколько примеров с первого по третий, дополнительно определяют второй пороговый период в зависимости от текущей скорости всасывания топлива двигателем и разности заранее заданного объема топлива и объема топлива, всосанного с момента выключения топливоподкачивающего насоса до момента достижения выходным сигналом давления, при котором он оставался постоянным. В пятом примере данного способа, опционально включающем в себя один или несколько примеров с первого по четвертый, заранее заданный объем топлива определяют как функцию от разности необходимого пикового давления подачи и необходимого давления подачи впадины и жесткости топливной системы. В шестом примере данного способа, опционально включающем в себя один или несколько примеров с первого по пятый, заранее заданный объем задают равным частному от деления разности необходимого пикового давления и необходимого давления впадины на жесткость топливной системы, причем жесткость топливной системы определяют в зависимости от плотности текучей среды в топливной системе.
Кроме того, в соответствии с вышеприведенным описанием, гибридное транспортное средство содержит: силовой агрегат, содержащий двигатель, мотор-генератор, аккумуляторную батарею и трансмиссию, соединенную с колесами транспортного средства; топливную систему, содержащую топливный бак, топливоподкачивающий насос, датчик давления, установленный ниже по потоку от выхода топливоподкачивающего насоса в топливной системе, и клапан разгрузки давления; и контроллер, содержащий долговременную память с хранящимися в ней инструкциями с возможностью реализации их процессорным устройством для: во время импульсной эксплуатации топливоподкачивающего насоса отслеживания объема топлива, всасываемого двигателем, когда топливоподкачивающий насос выключен; если объем топлива, всосанного двигателем, когда топливоподкачивающий насос выключен, достигнет заранее заданного объема до того, как выходной сигнал датчика давления упадет до необходимого давления впадины, включения топливоподкачивающего насоса, сохранения значения выходного сигнала датчика давления в качестве первого сохраненного значения, и запроса динамического определения давления паров топлива топливной системы; если запрошенный крутящий момент на колесах транспортного средства выше первого порога, механического соединения коленчатого вала двигателя с мотором-генератором, понижения нагрузки двигателя до тех пор, пока выходной сигнал датчика давления не останется постоянным в течение по меньшей мере первого порогового периода, с одновременным преобразованием электроэнергии в крутящий момент посредством мотора-генератора и подачей крутящего момента на колеса транспортного средства, и сохранения давления, при котором выходной сигнал остается постоянным, в качестве обновленного давления паров топлива; и, если обновленное давление паров топлива меньше первого сохраненного значения, указания того, что датчик давления выдает завышенные показания. В первом примере гибридного транспортного средства, контроллер также содержит инструкции в долговременной памяти с возможностью реализации их процессорным устройством для: во время импульсной эксплуатации топливоподкачивающего насоса отслеживания периода включенного состояния топливоподкачивающего насоса; если период включенного состояния топливоподкачивающего насоса достигнет калиброванного максимального периода включенного состояния до того, как выходной сигнал датчика давления возрастет до необходимого пикового давления, выключения топливоподкачивающего насоса, сохранения значения выходного сигнала датчика давления в качестве второго сохраненного значения, и запроса динамического определения уставки давления клапана разгрузки давления; если запрошенный крутящий момент на выходном валу двигателя ниже второго порога, механического соединения коленчатого вала с мотором-генератором, повышения нагрузки двигателя до тех пор, пока выходной сигнал датчика давления не останется постоянным в течение по меньшей мере второго порогового периода, с одновременным преобразованием части крутящего момента на выходном валу двигателя в электроэнергию посредством мотора-генератора и аккумулированием электроэнергии в аккумуляторной батарее, и сохранения давления, при котором выходной сигнал остается постоянным, в качестве обновленной уставки давления; и, если обновленная уставка давления превышает второе сохраненное значение, указания того, что датчик давления выдает заниженные показания. Во втором примере гибридного транспортного средства, опционально включающем в себя первый пример, контроллер также содержит инструкции в долговременной памяти с возможностью реализации их процессорным устройством для: в связи с указанием того, что датчик давления выдает завышенные показания, запуска калибровки выходного сигнала датчика давления, при этом калибровка включает в себя вычитание первой поправки на смещение из выходного сигнала датчика давления. В третьем примере гибридного транспортного средства, опционально включающем в себя первый и/или второй примеры, контроллер также содержит инструкции в долговременной памяти с возможностью реализации их процессорным устройством для: в связи с указанием того, что датчик давления выдает заниженные показания, запуска калибровки выходного сигнала датчика давления, при этом калибровка включает в себя прибавление второй поправки на смещение к выходному сигналу датчика давления. В четвертом примере гибридного транспортного средства, опционально включающем в себя один или несколько примеров с первого по третий, контроллер также содержит инструкции в долговременной памяти с возможностью реализации их процессорным устройством для задания первой поправки на смещение равной разности первого сохраненного значения и обновленного давления паров топлива, и задания второй поправки на смещение равной разности обновленной уставки давления и второго сохраненного значения.
Раскрытые в настоящем описании способы и системы позволяют точно выявлять погрешности в пределах диапазона датчика давления, измеряющего давление подачи топливоподкачивающего насоса. При выявлении погрешности в пределах диапазона датчика давления, можно перейти от стратегии управления топливоподкачивающим насосом по замкнутому контуру, предусматривающей регулирование коэффициента заполнения импульсов напряжения, подаваемых топливоподкачивающему насосу, в зависимости от данных обратной связи от датчика давления, к стратегии управления по разомкнутому контуру, согласно которой напряжение, подаваемое топливоподкачивающему насосу, не зависит от данных обратной связи от датчика давления. Причем выявление погрешностей в пределах диапазона может включать в себя выявление сглаживания измеренного датчиком давления без учета величины измеренного датчиком давления, что обеспечивает технический результат, состоящий в выявлении неисправности датчика давления, даже если датчик давления работает в пределах своего ожидаемого рабочего диапазона, и преимущество, состоящее в уменьшении сложности управления. Кроме того, переход от управления топливоподкачивающим насосом по замкнутому контуру к управлению им по разомкнутому контуру после выявления погрешности в пределах диапазона обеспечивает возможность продолжения создания топливной системой заданного командой давления подачи несмотря на неисправную работу датчика давления. Или же, в соответствии с раскрытыми в настоящем описании способами и системами, можно применять стратегию робастного управления по замкнутому контуру с обратной связью, позволяющую продолжить импульсную эксплуатацию топливоподкачивающего насоса с управлением по замкнутому контуру, даже если сглаживание выходного сигнала датчика давления указало на то, что датчик неисправен.
В еще одном варианте, способ согласно настоящему раскрытию может содержать шаги, на которых: посредством контроллера регулируют работу топливоподкачивающего насоса топливной системы двигателя для динамического определения уставки давления клапана разгрузки давления в топливной системе и давления паров топлива топливной системы; регулируют работу топливоподкачивающего насоса для поддержания первого необходимого запаса между максимальным давлением подачи и уставкой давления и второго необходимого запаса между минимальным давлением подачи и давлением паров топлива; и отслеживают давление подачи посредством датчика давления, расположенного ниже по потоку от топливоподкачивающего насоса, на предмет отклонения от ожидаемого наклона сигнала, измеренного датчиком давления подачи. Отклонение может включать в себя то, что наклон сигнала равен нулю дольше заранее заданного порогового периода.
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и/или транспортных средств. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых инструкций в долговременной памяти и могут осуществляться системой управления, содержащей контроллер, в сочетании с различными датчиками, исполнительными механизмами и другим аппаратным обеспечением двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки необязательно требуется для достижения отличительных признаков и преимуществ раскрытых в настоящей заявке вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или несколько из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия, операции и/или функции могут графически представлять код, запрограммированный в долговременной памяти машиночитаемого носителя данных в системе управления двигателем, при этом раскрытые действия выполняют путем исполнения инструкций в системе, содержащей разнообразные аппаратные компоненты двигателя в сочетании с электронным контроллером.
Следует понимать, что раскрытые в настоящей заявке конфигурации и алгоритмы по своей сути являются лишь примерами, и что конкретные варианты осуществления не должны рассматриваться в ограничительном смысле, ибо возможны разнообразные их модификации. Например, вышеизложенная технология может быть применена к двигателям со схемами расположения цилиндров V-6, I-4, I-6, V-12, в схеме с 4-мя оппозитными цилиндрами и в двигателях других типов. Объект настоящего изобретения включает в себя все новые и неочевидные комбинации и подкомбинации различных систем и схем, а также других отличительных признаков, функций и/или свойств, раскрытых в настоящем описании.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации компонентов, которые считаются новыми и неочевидными. В пунктах формулы ссылка может быть сделана на «один» элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты могут включать в себя один или более указанных элементов, не требуя и не исключая наличие двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов или свойств могут быть включены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема первоначальной формулы изобретения, также считаются включенными в объект настоящего изобретения.
Реферат
Изобретение может быть использовано в системах топливоподачи двигателей внутреннего сгорания. Предложены способы и системы для диагностики погрешности в пределах диапазона датчика давления 234, расположенного ниже по потоку от топливоподкачивающего насоса 208 в топливной системе транспортного средства. В одном примере способ может предусматривать осуществление управления топливоподкачивающим насосом с обратной связью по выходному сигналу датчика давления, отслеживание выходного сигнала датчика давления на предмет сглаживания во время подачи импульсов напряжения и регулирование работы топливной системы в зависимости от того, происходит ли сглаживание выходного сигнала датчика давления в течение по меньшей мере порогового периода времени, свидетельствующее о наличии погрешности в пределах диапазона. Способ может также предусматривать динамическое определение уставки давления клапана разгрузки давления топливной системы и давления паров топлива в топливной системе посредством отслеживания выходного сигнала датчика давления во время регулирования коэффициента заполнения импульсов напряжения, подаваемых топливоподкачивающему насосу. Изобретение позволяет повысить точность управления топливоподкачивающим насосом даже при неисправном датчике давления топлива, расположенном ниже по потоку от топливоподкачивающего насоса. 3 н. и 17 з.п. ф-лы, 21 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ управления работой топливной системы, топливная система для двигателя внутреннего сгорания
Комментарии