Импульсный сверхширокополосный датчик - RU2321341C1
Код документа: RU2321341C1
Чертежи



















Описание
Текст описания приведен в факсимильном виде.
























Реферат
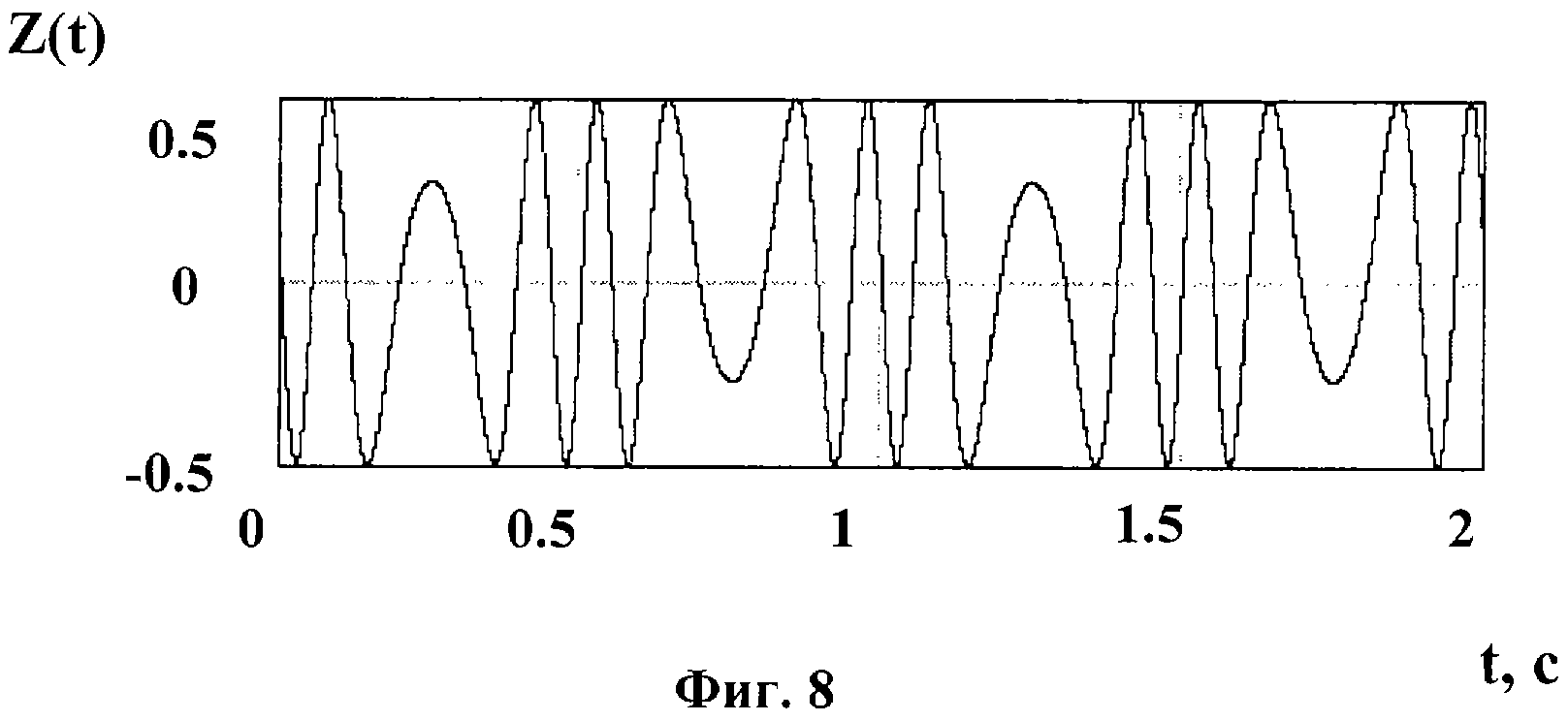
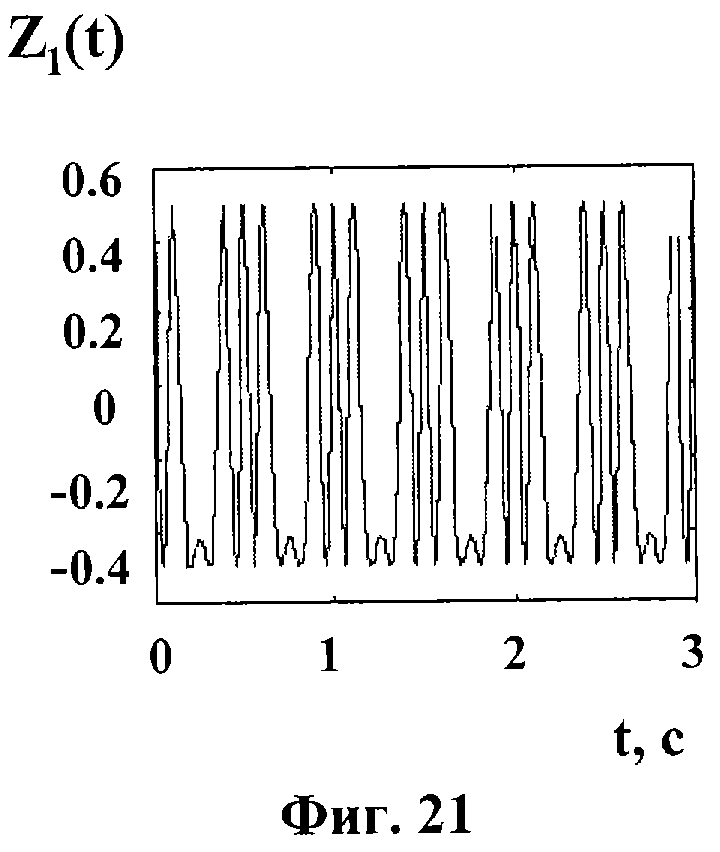
Изобретение относится к медицинским диагностическим приборам для исследования физиологических функций живых организмов, в частности к радиолокационным средствам диагностики параметров дыхания пациентов. Датчик контроля дыхания содержит блок управления, формирующий временную задержку, тракт формирования зондирующего сигнала, включающий в свой состав генератор когерентных радиоимпульсов, передающую и приемную антенны, тракт передатчика зондирующего сигнала, тракт приемника отраженного сигнала с двумя квадратурными каналами обработки отраженного сигнала, блок-процессор, обеспечивающий восстановление закона движения исследуемого объекта, и блок обработки и отображения информации. Каждый из квадратурных каналов обработки отраженного сигнала включает в свой состав смеситель сигналов, вход которого связан с приемной антенной, и аналого-цифровой преобразователь. В состав датчика входит также фазосдвигающая цепочка, вход которой соединен с трактом формирования зондирующего сигнала, а выход - со вторым входом смесителя сигналов второго квадратурного канала обработки отраженного сигнала. Первый вход блока-процессора соединен с выходом аналого-цифрового преобразователя первого квадратурного канала обработки отраженного сигнала, второй вход блока-процессора соединен с выходом аналого-цифрового преобразователя второго квадратурного канала обработки отраженного сигнала. Выход блока-процессора связан с блоком обработки и отображения информации. Датчик включает в свой состав управляемый электронный переключатель. Вход переключателя соединен с выходом тракта формирования зондирующего сигнала. Первый выход переключателя подключен к тракту передатчика зондирующего сигнала, а второй выход - ко второму входу смесителя сигналов первого квадратурного канала обработки отраженного сигнала и к входу фазосдвигающей цепочки. Изобретение позволяет повысить фазовую чувствительность датчика и обеспечить возможность контроля дыхания перемещающихся пациентов на всей рабочей дистанции датчика. 6 з.п. ф-лы, 26 ил.
Формула







Документы, цитированные в отчёте о поиске
Способ стабилизации временного положения сверхширокополосного сигнала и локатор для мониторинга живых объектов, реализующий этот способ
Комментарии